基于单片机的电梯控制系统
基于单片机电梯控制系统设计与实现
基于单片机电梯控制系统设计与实现电梯控制系统是指在电梯上安装控制器,通过电梯内外按钮的操作控制电梯的运行,使电梯能够精确地到达乘客所要的楼层。
本文将介绍基于单片机的电梯控制系统的设计与实现,包括硬件部分和软件部分的详细介绍。
硬件设计。
硬件设计包括电梯控制器、电机控制板、电机驱动板和电源电路四大部分。
1.电梯控制器。
电梯控制器是整个系统的核心,它接收电梯内、外按钮的信号并根据运行状态和电梯门状态来控制电动机(或液压)的正、反转和制动。
电梯控制器的主要功能是实现电梯的平层、自动门开关等功能。
2.电机控制板。
电机控制板是控制电动机的主板,它通过控制电机的转速来控制电梯的运动。
电机控制板还可以在电梯故障时进行故障检测和报警。
3.电机驱动板。
电机驱动板是控制电机转向的板,它可以实现电梯的上升和下降,使电机能够按照电梯控制器的指令进行正、反转。
4.电源电路。
电源电路用来为整个系统提供电源,保证系统的正常运行。
软件设计。
电梯控制系统的软件设计包括编写程序、编译和烧录等步骤。
1.程序编写。
程序编写是整个软件设计的核心,主要用C语言编写,包括电梯控制器程序、电机控制板程序、电机驱动板程序等。
2.编译。
编译的目的是将程序转译成机器语言,使单片机能够理解运行。
编译使用工具可以是Keil或者IAR等软件。
3.烧录。
烧录是将编译好的程序通过编程器烧录进单片机中,未经烧录的单片机是无法工作的。
总结。
电梯控制系统是一项复杂的工程,需要综合考虑硬件、软件和安全等多方面的问题。
本文介绍了基于单片机的电梯控制系统的设计和实现,并提供了相关的硬件和软件设计思路,希望对读者有所帮助。
基于单片机的智能电梯控制系统设计
基于单片机的智能电梯控制系统设计【摘要】智能电梯管控系统即是对电梯开展智能化控制,以原电梯为基础安装智能化门禁装置,用户惟有借助电梯专用卡或扫码方可启动电梯,使使用场所就此提升安全等级。
现阶段我国常用的智能电梯控管系统的核心是单片机为主。
本文以基于单片机视角,对智能梯管控系统开展全面探讨,旨在丰富相关研究,为后续电梯智能设计与功能完善提供有效借鉴。
【关键词】单片机;智能电梯;控制系统近年随着公众生活水平的持续攀升,高楼大厦早已成为生活中不可缺少的住宅及办公场地,电梯由此得到普及性应用,给公众生活和工作带来诸多便利。
同时随着电梯功能的日渐完善,为电梯安装智能系统也成为电梯智能化建设的关键。
而单片机成为智能电梯系统的重要构件。
电梯智控系统以单片机为基础,借助其特有的语音识别功能,创新语音控制替代人工按键,确保电梯自主运行,使传统电梯接触式按键成为历史,无接触式智控为现阶段电梯控制的主流。
一、智能电梯控制系统工作原理智能电梯管控平台系统为电梯智能化建设必要的控制软件,主要涵盖单片机、气体传感器、显示器、电机等。
其中最关键的是单片机。
单片机用于智能电梯管控平台可实现如下功用,即:其一,使控制范围得以扩大。
如果控制信号具体到某个位置时,则系统初定组借助不同方式实现电梯的换接、开断等。
其二,放大功率。
单片机在智能电梯系统中要实现高灵敏度调节,即对功率加以控制。
其三,综合信号。
单片机可以确保智能电梯实现对多个信号的有效控制,在明确智能输入形式的前提,单片机综合比对以达到最佳控制效果。
智能电梯联动控制平台系统两端接收到来自电压的刺激后,电流由此产生,继而推进电磁效应形成。
电磁效应在作用被激发后将衔铁返弹至弹簧,继而带动触点完成吸合。
智能电梯管控平台基于上述原理开展作业。
二、基于单片机的智能电梯控制系统设计(一)智能电梯控制系统框架组成智能电梯基于单片机完善自身管控系统,其核心处理器即不同型号的单片机。
智控系统要明确语音信号处理仪,一般来说选取配套的语音控制芯片,借助语音芯片把声音转换作智控信号以完成电梯的智能化操作。
基于单片机的电梯控制设计
基于单片机的电梯控制设计随着现代城市的发展,高层建筑的数量不断增加,电梯已成为居民出行的必备工具。
电梯控制系统是电梯的核心部分,其合理、安全、高效的控制对电梯的运行起着决定性的作用。
本文基于单片机,对一种现代化电梯控制系统进行了设计和实现,并逐步介绍其原理和具体实现方法。
1.设计思路基于单片机的电梯控制系统,基于先进、高效的现代技术,采用数字、电子、计算机等技术,集成了电梯运行的各项功能,如门控、运行控制、限速保护、人员安全保护等。
结合具体使用场景,通过对电梯各种状态的控制,实现电梯的自动运行。
2.设计方案此次设计采用基于单片机的电梯控制方案,通过采用传感器、驱动器等电子元器件,真正实现了电梯的智能化控制。
主要由以下五个部分组成:(1)控制部分:采用AT89C52单片机作为主控制器,负责控制电梯各部分。
通过对单片机程序的编写,对各个部分进行精确的控制和调整。
(2)物理部分:即电梯的各个部分,包括电机、减速钢丝绳、限速器、轮架、门体等。
(3)传感器部分:通过安装在电梯厅和轿厢内的传感器,探测电梯的各种状态信息,例如:电梯内外乘客数量、电梯运行方向、门体状态等。
实时将这些状态码转换成数字数据传送到单片机中,实现对电梯运行状态的掌控。
(4)显示部分:将电梯运行状态的各种信息,通过LED数码管、液晶显示等形式,进行实时显示。
这部分可以为乘客提供明确的电梯状态信息,提高电梯使用效率和安全性。
(5)交互部分:如何使乘客和电梯进行有效的交互,减少误操作,是电梯控制设计的核心关键。
通过电子开门器、按钮等,实现乘客与电梯交互的整个过程。
3.实现过程(1)设计程序代码在AT89C52单片机中,通过程序设计实现电梯的各部分精确控制。
代码的设计需要考虑到电梯各种状态,例如:乘客进出电梯、电梯起升、降落等。
通过逻辑程序的编写,实现扫描电梯状态,并对电梯的运行进行掌控。
(2)制作原型通过根据设计方案,搭建各个部分的物理模型,并进行调试和安装。
基于单片机的电梯控制方案

基于单片机的电梯控制方案利用单片机作为控制核心,实现电梯的控制,其系统框图如下:图1基于单片机控制系统框图STC89C52单片机构建最小系统,输入模块采用按键方式,下面将详细探讨具体方案的实现。
1.3.1单片机最小系统本次设计选择的单片机为常见的STC89C52,该款芯片是STC公司生产的一种低耗能、高性能的CMOS8位微控制器,具有8K的可编程flash存储器。
使用的内核为经典的MCS-51内核,同时进行了更多改良。
图2STC89C52引脚图主要特点:1)8K的Flash;2)512字节的RAM;3)内置4K字节的EEPROM;4)全双工串行口;5)空闲模式下,CPU停止工作,允许RAM、定时器/计数器、串口、中断继续工作。
1.3.2重量检测模块方案重量检测模块的主要作用是在电梯的载重超过额定重量时,检测装置能够向单片机发送信号,从而控制电梯不能运行并发出过载信号,提醒上梯的乘客下梯,过载开关打开后,门无法关闭。
根据其在电梯安装方式的不同,可以大致分为以下几种:1)活动轿厢地板。
这种是装在轿厢上的载重检测装置,活动地板与轿厢壁之间有一定的距离,轿厢地板支撑在压力传感器上,当重力超过设置值时,开关导通,单片机接收到信号。
2)轿顶称量装置。
这种装置是以压缩弹簧作为称重元件,在轿厢架上梁的绳头组合处设以超载装置的杠杆,当电梯承受不同重量的载荷时,绳头组合会带动杠杆发生上下移动,当超重时,杠杆的摆动会触动微动开关,给电梯相应的控制信号。
3)电阻应变式称量装置。
随着技术的发展电阻应变式装置逐渐的到来发展应用,该装置的主要由测量电桥、载频振荡器、放大器、低通滤波器等组成。
图3常见电阻应变式传感器1.3.3位置检测模块方案电梯在运行的过程中会经历启动加速,匀速运行和,减速停止3个过程,在停止时,轿厢必须要停在指定的位置。
位置检测装置的作用是通过光电传感器或其他传感器的检测,将信息发送给单片机,从而控制电梯,在平层区域内,使轿厢准确停在预定位置。
基于单片机控制的电梯控制系统
基于单片机控制的电梯控制系统第一章:引言1.1 研究背景电梯作为现代城市中必不可少的交通工具,已经成为人们日常生活中的一部分。
随着技术的发展,电梯也不再是简单的上下楼工具,而是逐渐成为智能化、自动化的设备。
电梯控制系统是电梯运行的核心,也是保证电梯安全、高效运行的关键。
1.2 研究目的和意义本文旨在设计并实现一个基于单片机控制的电梯控制系统,以提高电梯的运行效率和安全性。
通过对电梯控制系统的研究,可以更好地理解电梯的工作原理,为电梯的维护和运营提供参考。
同时,通过对单片机控制电梯系统的设计和实现,可以提高学生的实践能力和创新意识。
第二章:电梯控制系统的工作原理2.1 电梯的基本结构电梯由电动机、控制系统、导轨、轿厢、门等组成。
其中,控制系统是电梯运行的核心部分,负责控制电梯的上下运动、门的开关等功能。
2.2 电梯的工作流程电梯的工作流程包括乘客呼叫、电梯响应、开门、关门、上行或下行等步骤。
控制系统根据乘客的呼叫信号和电梯当前状态,确定电梯的运动方向和停靠楼层。
2.3 电梯控制算法电梯控制算法是决定电梯运行状态的关键。
常见的电梯控制算法有先来先服务算法、最短路径算法、最近调度算法等。
第三章:基于单片机的电梯控制系统设计3.1 系统硬件设计基于单片机的电梯控制系统的硬件设计包括电梯主控板、传感器、按钮等。
电梯主控板负责接收和处理各种信号,并控制电梯的运行。
传感器用于检测电梯当前状态,按钮用于乘客呼叫电梯。
3.2 系统软件设计基于单片机的电梯控制系统的软件设计包括程序的编写和调试。
程序需要根据电梯工作流程和控制算法,实现电梯的运行控制和状态监测等功能。
第四章:系统实现与测试4.1 硬件制作和连接根据设计要求,制作电梯主控板和其他硬件设备,并进行连接和调试。
4.2 软件编程与调试根据系统设计要求,编写电梯控制系统的软件程序,并进行调试和测试。
4.3 系统性能测试对电梯控制系统进行功能和性能测试,包括电梯的运行速度、响应时间、停靠楼层准确性等指标的测试。
基于单片机的电梯运行控制系统
基于单片机的电梯运行控制系统随着科技的不断进步,基于单片机的电梯运行控制系统成为了现代电梯行业的重要发展方向。
这种控制系统具有智能化、节能、安全可靠等诸多优势,为电梯的运行管理提供了全新的解决方案。
一、单片机在电梯运行控制系统中的应用单片机作为一种集成了微处理器、内存、外设接口等功能的芯片,具有体积小、价格低、可靠性高等特点,因此在电梯控制系统中得到了广泛应用。
基于单片机的电梯运行控制系统可以通过编程实现多种控制功能,如楼层呼叫、定向运行、减速停车等。
此外,单片机还可以结合传感器、变频器等设备,实现对电梯的智能监控和节能控制。
二、电梯运行控制系统的组成部分及工作原理电梯运行控制系统主要由以下几个部分组成:1、控制器:控制器是电梯运行控制系统的核心部分,主要负责接收乘客的呼叫信号,并根据最优路径算法确定电梯的运行方向和速度。
控制器一般由单片机及其外围电路组成。
2、呼叫信号装置:呼叫信号装置设置在各个楼层,用于乘客发送呼叫信号。
当乘客按下呼叫按钮时,相应的楼层信号将被发送到控制器。
3、显示装置:显示装置通常设置在电梯内,用于显示当前楼层、目的楼层等信息,以方便乘客了解电梯的运行状态。
4、传感器:传感器用于检测电梯的运行状态和位置信息,如电梯的上下方向、当前楼层等。
5、变频器:变频器用于控制电机的转速,从而实现电梯的速度控制。
电梯运行控制系统的工作原理如下:当乘客按下呼叫按钮时,控制器接收到楼层信号,并根据最优路径算法确定电梯的运行方向和速度。
变频器根据控制器的指令控制电机的转速,从而控制电梯的速度。
同时,传感器检测电梯的运行状态和位置信息,并将相关信息反馈给控制器。
控制器根据传感器的反馈信息调整电梯的运行状态,确保电梯的稳定运行。
三、现有问题及解决方法尽管基于单片机的电梯运行控制系统具有诸多优点,但在实际应用中仍存在一些问题。
例如,控制器可能出现故障,导致电梯无法正常运行。
为解决这一问题,可在控制器中加入备份电路,以确保在控制器出现故障时电梯仍能正常运行。
基于单片机的电梯控制系统方案设计
基于单片机的电梯控制系统方案设计本方案以STC89C52芯片为核心,模拟了电梯控制系统所需的一些基本功能,通过按键选择楼层,数码管显示实时楼层数,LED灯组成的箭头指示上下方向。
同时,采用uln2003来驱动步进电机转动,以步进电机的转动方向来模拟电梯运行方向。
根据电梯运行到不同的楼层,产生不同的电平量,以此实现对电梯的控制。
该方案软硬件结构设计简单可靠,实现了对电梯的运行控制。
标签:电梯;步進电机;STC89C52引言目前电梯控制系统大多采用继电器或者可编程控制器(PLC)的控制方式,存在着成本高,需要三相供电等缺点,本方案给出了一种基于单片机的电梯模型控制系统。
以单片机为核心,再辅以适当的硬件电路和控制程序来检测和控制整个电梯的信号,具有成本低、通用性强、灵活性大、扩展容易及易于实现复杂控制等优点。
1 总计设计方案本方案采用开关作为电梯内外的请求按键,按键和单片机的插针接口相连,按键按下为低电平,将信号传送到单片机,单片机根据各接口的信号进行判断处理,处理完毕后控制步进电机运动,实现电梯的上下运动,采用传感器确定电梯所在的楼层数及电梯准确停止的位置,用七段数码管显示电梯所在楼层,用LED 灯显示电梯的上下运行状态。
本方案采用STC89C52为控制电梯的单片机[1]。
考虑到经济性与实用性,选择28BYJ48型步进电机。
采用5V直流电源为单片机、指示灯、数码管供电。
总体设计框图如图1所示。
本方案主要由5大部分组成:键盘模块、单片机控制电路、显示模块电路、电源模块电路、步进电机驱动电路。
其中单片机控制电路主要包含复位电路,电路复位后楼层显示数字 1 表示电梯此时在一楼,而电梯楼层位置是由延时电路控制的,延时电路有2秒延时,每层之间通过2秒延时控制即每延时2秒表示电梯走了一层,同时显示相应的上下箭头指示。
本方案的延时部分主要是由软件控制的。
电梯的状态是通过点阵组成的上下箭头和数字显示的。
键盘电路采用独立式按键。
(完整word版)基于单片机控制的电梯控制系统
单片机综合实验实验报告学院计算机与电子信息学院专业电子信息工程班级电信11- 班姓名学号110340301实验题目基于单片机控制的电梯控制器系统环境Proteus 指导教师左敬龙实验时间2013年10月28日至2013年11月01日实验报告评分:_______题目:基于单片机控制的电梯控制器班级:电信11- 姓名:摘要:单片机即单片微型计算机(Single-Chip Microcomputer ),是集CPU ,RAM ,ROM ,定时,计数和多种接口于一体的微控制器。
本设计介绍了基于单片机的电梯控制系统,硬件部分主要由单片机最小系统模块、电梯内外电路按键矩阵模拟检测模块、电梯外请求发光管显示模块、楼层显示数码管模块、电梯上下运行显示模块等5部分组成。
该系统采用单片机(AT89S52)作为控制核心,内外使用按键按下与否而引起的电平的改变,作为用户请求信息发送到单片机,通过单片机来控制电机的正反转,并且根据楼层检测结果控制电机停在目标楼层。
软件部分则使用C语言,利用查询方式来检测用户请求的按键信息,根据电梯运行到相应楼层时,模拟按键引起电平变化,送到单片机计数来确定楼层数,并送到数码管进行显示。
硬件设计简单可靠,结合软件,基本实现了六层电梯运行的模拟。
关键词:单片机,AT89S52,电梯,控制器。
1 引言随着生活节奏的加快以及生活环境的不断改变,高楼大厦中电梯的应用也越来越普及,而如何有效地使用电梯,是其能够智能化的稳定工作已经成为焦点。
从而,电梯便是高层住宅、商店、宾馆、写字楼、仓库等高层建筑不可缺少的垂直方向的运输工具。
然而,1889年美国奥梯斯升降机公司推出的世界第一部以电动机为动力的升降机,同年的纽约市马累特大夏安装成功。
随着建筑物规模的不断扩展,楼层也越来越高,对电梯的调速精度、调速范围等静态和动态特性也随之提出更高的要求。
由于传统的电梯运行逻辑控制系统采用的是继电器逻辑控制线路。
采用这种控制线路存在易出故障、维护不便、运行寿命较短、占用空间大等缺点。
基于单片机控制的电梯控制器
3.电梯控制系统原理3.1以交流接触器控制的三相电机主拖动系统。
3.2外呼内选系统,外部呼叫信号和指示以及轿厢内选项层和指示系统。
3.3延时开关门电路。
3.4轿厢内状态与外部指示系统,随时显示电梯所在位置。
3.5操作控制系统。
3.6楼层指示采用LED七段数码管,清晰直观,节省能源。
3.7所有的显示运行状态及指示灯均采用发光二及管,大大节约了电能,整个控制箱电源功率在100W以下。
3.8在控制器上可方便的调节延时开关门和换速电阻切换时间,便于安装和现场调试。
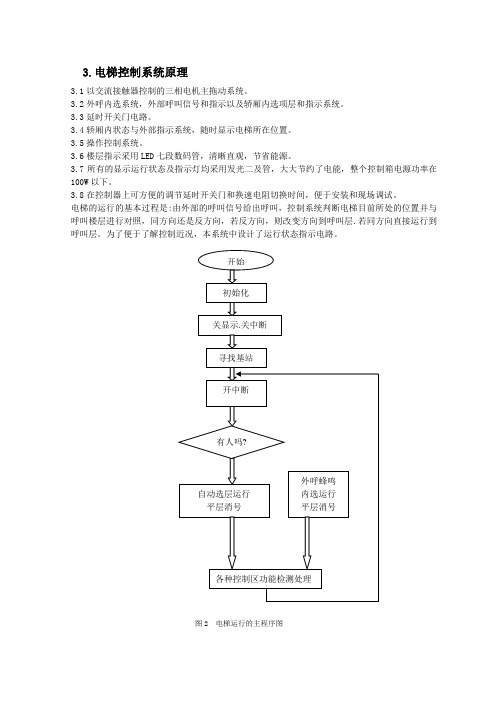
电梯的运行的基本过程是:由外部的呼叫信号给出呼叫,控制系统判断电梯目前所处的位置并与呼叫楼层进行对照,同方向还是反方向,若反方向,则改变方向到呼叫层.若同方向直接运行到呼叫层。
为了便于了解控制近况,本系统中设计了运行状态指示电路。
图2 电梯运行的主程序图图3 正常运行程序段框图驱动输出接口电路主要是电机主拖动及开关门电机控制.主引电机使用三相380V交流供电,其电机功率约为22KW左右.因此所使用的交流接触器触点电流较大,尤其在刚启动时电流更大,触头引起的火花必然会对单片机的工作产生影响.为了防止这个影响的产生,在输出电路中考虑了两级隔离措施.首先用光电耦合器输出将逻辑TTL电平转换为直流5V电平的驱动电路,从而接通交流电动机工作。
A/D转换芯片0809具有八个模拟量输入通道,每个通道对应的数据范围为0-255,将这些数据作为软件中延时时间的常数,通过电位器改变A/D转换数值,达到改变时间的目的.在安装和维护过程中,对停车平层的舒适感,主要靠从快车到三次慢车的延时时间来实现,对启动的舒适感也主要靠调整从三次慢车到快车的延迟时间.这个调整随着电梯运行状态的变化经常运行。
另外,还有延时关门时间,要调节到适当长度才符合实际情况。
这个电路方便可靠地实现了上述调整,节约了电梯高度时间!本电梯采用了延时电路来控制电梯的开关门,下面是关门控制程序段框图:图4 关门程序控制程序段框图控制系统软件在硬件支持下运行,指挥系统进行相应的控制.软件均采用MCS—51汇编语言写成,约点内存3.5K左右.由于电梯控制系统实时采集数据量少,没有在系统中扩展随机RAM,只使用了8031片内RAM来安排呼叫信号的记录,判断输出状态.并安排有足够的堆栈来满足中断及程序调用的需要。
基于单片机的电梯控制系统设计
基于单片机的电梯控制系统设计随着现代社会的快速发展,电梯已成为人们日常生活中不可或缺的运输工具。
为了提高电梯的运行效率,保证其安全可靠性,设计一种基于单片机的电梯控制系统。
该系统以单片机为核心,结合传感器、按键、显示等模块,实现对电梯的运行状态、楼层信号、呼梯信号的实时监控与显示。
一、系统硬件设计1、单片机选择本设计选用AT89S52单片机作为主控芯片,该芯片具有低功耗、高性能的特点,内部集成了丰富的外围设备,方便开发与调试。
2、输入模块设计输入模块主要包括楼层传感器和呼梯按钮。
楼层传感器采用光电式传感器,安装在各楼层,用于检测电梯的运行状态和位置;呼梯按钮安装在电梯轿厢内,用于收集用户的呼梯信号。
3、输出模块设计输出模块主要包括显示模块和驱动模块。
显示模块采用LED数码管,用于实时显示电梯的运行状态、楼层位置等信息;驱动模块包括继电器和指示灯,用于控制电梯的运行和指示状态。
4、通信模块设计通信模块采用RS485总线,实现单片机与上位机之间的数据传输与通信。
二、系统软件设计1、主程序流程图主程序主要实现电梯控制系统的初始化、数据采集、处理与输出等功能。
主程序流程图如图1所示。
图1主程序流程图2、中断处理程序中断处理程序主要包括外部中断0和定时器0的中断处理。
外部中断0用于处理楼层传感器的信号,定时器0用于计时和速度控制。
三、系统调试与性能分析1、硬件调试首先对电路板进行常规检查,包括元器件的焊接、电源的稳定性等;然后分别调试输入、输出、通信等模块,确保各部分功能正常。
2、软件调试在硬件调试的基础上,对软件进行调试。
通过编写调试程序,检查各模块的功能是否正常;利用串口调试工具,对通信模块进行调试。
3、性能分析经过调试后的电梯控制系统,其性能稳定、运行可靠。
该系统能够实现对电梯运行状态、楼层信号、呼梯信号的实时监控与显示,并且具有速度快、安全可靠等特点。
该系统还具有成本低、易于维护等优点,适用于各种场合的电梯控制。
基于单片机的电梯控制系统毕业论文(完整)概要

单片机广泛应用于仪器仪表、家用电器、医用设备、航空航天、专用设备的智能化管理及过程控制等领域,大致可分如下几个范畴:
(1)在智能仪器仪表上的应用:单片机具有体积小、功耗低、控制功能强、扩展灵活、微型化和使用方便等优点,广泛应用于仪器仪表中,结合不同类型的传感器,可实现诸如电压、功率、频率、湿度、温度、流量、速度、厚度、角度、长度、硬度、元素、压力等物理量的测量。采用单片机控制使得仪器仪表数字化、智能化、微型化,且功能比起采用电子或数字电路更加强大。例如精密的测量设备(功率计,示波器,各种分析仪)。
第四章系统调试19
4.1硬件调试19
4.2软件调试19
第五章 英文翻译21
结论25
致谢26
参考文献27
程序附录28
引 言
随着现代高科技的发展,住房和办公用楼都已经逐渐向高层发展。电梯是高层宾馆、商店、住宅、多层仓库等高层建筑不可缺少的垂直方向的交通运输工具。1889年美国奥梯斯升降机公司推出的世界上第一部以电动机为动力的升降机,同年在纽约市马累特大厦安装成功。随着建筑物规模越来越大,楼层也越来越高,对电梯的调速精度、调速范围等静态和动态特性都提出了更高的要求。由于传统的电梯运行逻辑控制系统采用的是继电器逻辑控制线路。采用这种控制线路,存在易出故障、维护不便、运行寿命较短、占用空间大等缺点。
不同的单片机有着不同的硬件特征和软件特征,即它们的技术特征均不尽相同,硬件特征取决于单片机芯片的内部结构,用户要使用某种单片机,必须了解该型产品是否满足需要的功能和应用系统所要求的特性指标。这里的技术特征包括功能特性、控制特性和电气特性等等,这些信息需要从生产厂商的技术手册中得到。软件特征是指指令系统特性和开发支持环境,指令特性即我们熟悉的单片机的寻址方式,数据处理和逻辑处理方式,输入输出特性及对电源的要求等等。开发支持的环境包括指令的兼容及可移植性,支持软件(包含可支持开发应用程序的软件资源)及硬件资源。要利用某型号单片机开发自己的应用系统,掌握其结构特征和技术特征是必须的。
基于AT89C51单片机电梯控制系统的设计
基于AT89C51单片机电梯控制系统的设计电梯控制系统是一个非常常用且重要的系统,在现代的高层建筑中几乎无处不在。
在这篇文章中,我们将介绍一个基于AT89C51单片机的电梯控制系统的设计。
首先,让我们了解一下电梯系统的基本原理。
一个标准的电梯系统由电梯井、电梯、电梯按钮、电梯控制系统和相关的传感器组成。
电梯井是电梯运行的区域,电梯则负责在楼层之间垂直运行。
电梯按钮用来选择目标楼层,电梯控制系统接收按钮的输入,并根据指定的楼层来控制电梯的运行。
传感器则用于检测电梯是否到达了指定楼层。
在本设计中,我们将使用AT89C51单片机作为电梯控制系统的核心芯片。
AT89C51是一种8位微控制器,具有强大的处理能力和丰富的接口功能。
它可以与其他外部设备进行通信,接收和发送数据,并控制电梯的运行。
首先,我们需要对电梯系统进行建模和设计。
我们将电梯系统划分为几个模块,包括电梯井、电梯、电梯按钮、电梯控制系统和传感器。
在电梯井中,我们需要安装楼层传感器,以便控制系统能够准确地检测电梯的位置。
这些传感器可以是光电传感器、红外线传感器或其他类型的传感器。
当电梯到达指定的楼层时,传感器将发送信号给控制系统。
电梯按钮用于选择目标楼层。
每个楼层都安装有一个电梯按钮。
当乘客按下按钮时,按钮会发送信号给控制系统,控制系统将根据输入的楼层信息计算出电梯的运行方向。
电梯本身主要由电机和轿厢构成。
电梯电机用于驱动轿厢在不同楼层之间垂直运动。
控制系统将控制电机的转动方向和速度,以实现电梯的运行。
最后,我们来了解电梯控制系统的设计。
电梯控制系统由AT89C51单片机和其他外部设备组成。
AT89C51单片机将接收来自按钮和传感器的输入信号,并根据输入信号来控制电梯的运行。
为了实现这个设计,我们需要将单片机与按钮和传感器连接。
单片机的GPIO引脚将与按钮连接,以接收按钮输入的信号。
传感器将与单片机的引脚连接,在电梯到达指定楼层时发送信号给单片机。
基于单片机的电梯控制系统
基于单⽚机的电梯控制系统1 课题概述1、1课题的主要研究内容及设计步骤本课题的主要任务就是完成⼀个电梯系统的调度模块,即根据每个楼层不同顾客的按键需求,让电梯做出合理的判断,正确⾼效地知道电梯完成各项载客任务。
根据此任务,本课题需要研究的内容有:1、根据系统的技术要求,进⾏系统硬件的总体⽅案设计;2、学习单⽚机的相关知识,并且加以运⽤;3、选择恰当的芯⽚,并对其内部协议有所掌握,便于应⽤。
4、研究C语⾔编程,并且规定电梯的⼯作规则,⽤C语⾔加以实现;5、对软件与硬件进⾏调试,让其协调⼯作,完成指定任务。
结合以上内容,本课题的设计⽅案步骤如下:关于硬件部分:⾸先,对实际的电梯系统进⾏模拟,⼀般情况下,⼀个电梯应该具备相关按键、显⽰⼆极管、数码管等,由于这就是⼀个调度模块,故没有设计具体的轿厢等机械部分。
然后,结合这些实物,选择恰当的芯⽚,并分成若⼲模块,安排好各⾃之间的关系。
接着,要完成电路图的设计,画出PCB板,焊接相关器件后进⾏硬件调试,瞧就是否好⽤并加以适当的更正。
关于软件部分:关于电梯调度时所遵循的原则作出规定,其必须基于⾼效与⼈性化两个原则。
最后就是使⽤C语⾔将规定程序化,以便电梯真正的运作。
当然,⼆者的关系并不就是分离的,它们就是相辅相成,硬件依据软件来验证,软件依据硬件来调试。
经过⼀个个的发现问题、⼀个个的解决问题,最终做出完美的电梯调度模块。
1、2课题的开发环境简介1、2、1电路图制作软件proteus 7、2Proteus就是⽬前最好的模拟单⽚机外围器件的⼯具,因此在仿真与程序调试时,关⼼的不再就是某些语句执⾏时单⽚机寄存器与存储器内容的改变,⽽就是从⼯程的⾓度直接瞧程序运⾏与电路⼯作的过程与结果。
对于这样的仿真实验,从某种意义上讲,就是弥补了实验与⼯程应⽤间脱节的⽭盾与现象。
1、2、2C51的程序开发软件KeilKeil C51 软件就是众多单⽚机应⽤开发的优秀软件之⼀,它集编辑,编译,仿真于⼀体,⽀持汇编,PLM 语⾔与 C 语⾔的程序设计,界⾯友好,易学易⽤。
基于单片机的智能电梯控制系统设计
基于单片机的智能电梯控制系统设计摘要本文介绍了一种采用单片机STC89C52芯片进行电梯控制系统的设计方法,主要阐述如何使用单片机进行编程来实现四层电梯的智能控制,利用单片机编程简洁而又多变的设计方法,缩短了研发周期,同时使电梯控制系统体积更小功能更强大.本设计实现了电梯控制系统所需的一些基本功能,能通过电梯内按键或者电梯外上升、下降按键选择楼层,数码管显示实时楼层数,LED显示实时电梯运行状态。
原理图和PCB部分采用protel99se专业软件来设计,实现将设计产品化。
本次设计更注重了把一些新的思路加入到设计中。
主要包括采用了STC89C52芯片,使用C语言进行编程,使其具有了更强的移植性,更加利于产品升级。
关键词:STC89C52;电梯控制系统;protel99se;C语言AbstractThis paper introduces a design method of using STC89C52 chip for elevator control system, mainly describes how to use microcontroller programming to achieve the intelligent four storey elevator control, the design method of microcontroller programming simple and variable, shortens the development cycle, at the same time that the elevator control system smaller and more powerful. Some of the basic functions of the design and implementation of elevator control system required by the elevator,elevator buttons or rise,decline the key to select the floor, digital tube display real-time number of floors,LED display real-time operating state of elevator. Schematic and PCB design using Protel99SE software,the design of products。
基于51单片机的电梯智能控制系统设计与实现
基于51单片机的电梯智能控制系统设计与实现电梯智能控制系统是一种基于微控制器的设计,它的主要目的是帮助电梯自动化运行并保证运行的安全性。
本文将介绍基于51单片机的电梯智能控制系统的设计和实现。
一、电梯智能控制系统的设计思路若要设计一款电梯智能控制系统,我们需要考虑以下方面:1. 电梯的联动性:我们需要让电梯在呼叫系统和在楼层之间进行联动通信,从而实现自动化操作。
2. 速度控制器:电梯的电控系统中应该包括速度控制器以及对所有电动机和电脑设备的功率管理。
3. 安全保障:此类系统应该包括底层的传感器和控制器,以预防电梯陷入危险的情况。
基于这些方面,我们可以设计出以下的电梯智能控制系统:1. 位于每个楼层的面板将包括两个按钮:上行/下行和电梯呼叫。
2. 每个电梯都有自己的控制器,可以预测每个乘客的目标楼层以及电梯运动的方向。
3. 运动速度应该根据电梯的位置或者方向进行控制。
当电梯靠近楼层之后,速度应该降低并使电梯到达目的地。
4. 当电梯遇到紧急情况,如被卡住或者有人挡住,控制器应该立即响应并阻止电梯运动,避免任何可能危险的事件发生。
二、电梯智能控制系统的硬件设计以下是电梯智能控制系统的基本硬件设计:1. 单片机:电梯智能控制系统需要恰当的单片机来控制每个电梯的速度和位置,同时实现通信功能。
在本例中,我们使用51单片机。
2. 传感器:控制电梯位置和速度的传感器包括霍尔传感器和光电传感器。
3. 驱动器:驱动器是一种组件,可以调节电器负载的功率流量。
在电梯中,我们使用电动机和变频器驱动器来控制电梯的运动。
4. LED 显示器:该显示器用于指示电梯的运动状态,例如方向的指示灯、上行/下行箭头、电梯当前位置的数字等。
5. 按钮面板:面板应该在每个楼层提供上行/下行按钮和呼叫按钮,以允许乘客控制电梯。
三、电梯智能控制系统的软件设计以下是电梯智能控制系统的基本软件设计:1. 定时器:使用定时器来控制每个电梯的位置和速度,例如电梯到达楼层时,应该停止电梯并允许乘客离开或进入电梯。
基于单片机的电梯控制系统的设计
基于单片机的电梯控制系统的设计电梯控制系统被广泛应用于现代化城市、商业综合体、大型住宅等地方,它的安全性和便捷性受到广泛关注。
基于单片机电梯控制系统的出现,完美地解决了一系列问题,如传统微型电梯控制系统存在的布线麻烦、易受电磁干扰、系统资源不足等问题。
下面,本文将详细介绍基于单片机的电梯控制系统。
一、设计思想本控制系统采用AT89S51单片机作为控制器,其使用了数字电路和模拟电路相结合的设计方法,从而实现了对电梯的自动控制。
该系统集成了多种保护措施,具有高度的可靠性、抗干扰能力和波动能力,是一种非常实用的电梯控制系统。
二、硬件设计(1)AT89S51单片机该单片机采用8位CMOS微控制器,程序存储器容量为32KB,数据存储器容量为2KB,支持定时器/计数器、串行通信接口等外设。
(2)电梯电机电梯电机是电梯运行的关键部件之一,常见的电梯电机有交流电机和直流电机两种。
设计时需根据实际需要选择合适的电机,以实现电梯的起升和运行。
(3)门禁控制器门禁控制器是门禁装置的核心部件之一,用于控制电梯门的开启和关闭,保证电梯的安全性。
(4)电源模块电源模块提供电梯系统所需的稳定可靠的电源。
(5)其他模块还需要设计开关模块、指示灯模块、蜂鸣器模块等其他模块,以实现电梯的正常控制和提示。
三、软件设计该系统总共包含三个模块,即控制模块、运算模块和存储模块。
(1)控制模块第一步:启动电梯,检查电路可靠性,门状态、里程表、楼层显示等各项需要监测的装置是否正常工作。
第二步:选择电梯的运行方向和终点楼层。
第三步:通过监测电梯门开关的状态来控制电梯门的开关以及上下行电梯。
(2)运算模块运算模块负责楼层选取、电梯运转等计算工作。
具体方法:1.通过扫描各楼层的按钮输入,分析电梯所选楼层的方向。
2.确定电梯到达的楼层。
3.开关电梯门。
4.根据现场需求继续运行或停止。
(3)存储模块存储模块主要用于存储电梯的相关参数和状态信息,如电梯所在楼层、电梯的运行方向、上升/下降时间、停留时间等。
基于单片机的电梯控制系统综述

Elevater Control System Based On MCU
Student: Ma Wei, Institute of Electronics and Information
Tutor: Gao XiuE, Institute of Electronics and Information
[Abstract]This paper introduces the 80C51 microcontroller as the core control device of the elevator control system, including the issues outlined, program feasibility studies, hardware design, software design, system debugging, and several other parts.The system uses a microcontroller as the control centre, Firstly, it is by scanning the internal and external level change caused by keyboard to be a user requests information to the microcontroller, The next is that the single chip controls the motor based on test results floors stopped in the target floor. Hardware part mainly are made of the microcontroller, floor detection module, level digital display, electric motor drive module, key scan module, alarm module, circuit directions up and down the line calls and other components.Floor detection uses optical sensors. When elevator goes to the appropriate floor, Photoelectric sensors produce level changes sent to the microcontroller to determine the floor,.The part of motor control uses H Bridge type circuit to control the DC motor .Software components intorduce System programming design ideas, procedures, functional analysis . It is not only focusing on the logical design of the main structure but alsoseparately introduced the warning function, the demonstration function, the pressed key scanning, the position read, the demonstration, the lift control logic small steelyard procedure structure and the function.Software components use C language. This realization way is the use of Interrupt mode to detect the information of the floor sent to the Digital tube . The hardware design of the system combined with the software is simple and reliable. So It is basically to achieve simulation of elevator running five floors.
基于STC89C52单片机的模拟电梯控制系统

基于STC89C52单片机的模拟电梯控制系统模拟电梯控制系统是一个基于单片机技术的智能控制系统,它可以模拟真实电梯的运行过程,实现电梯的自动运行和楼层选取功能。
本文将介绍基于STC89C52单片机的模拟电梯控制系统的设计和制作过程。
一、系统设计需求电梯控制系统的设计需要满足以下基本需求:1. 电梯的运行控制:能够模拟电梯的上行、下行等基本运行状态;2. 楼层选取功能:能够实现乘客在不同楼层按下按钮后,电梯能够自动前往相应楼层;3. 安全性能:在电梯门未关闭或者有障碍物时,能够停止电梯的运行。
二、硬件设计1. 单片机选型本系统选用STC89C52单片机作为控制核心,它具有强大的性能和丰富的外设接口,非常适合作为电梯控制系统的控制器。
2. 电梯模拟电路电梯模拟电路包括电机驱动电路、楼层选择按钮、轿厢内按钮、门控制电路等,这些电路在实际应用中需要与单片机进行连接和控制。
3. 传感器和执行器电梯控制系统需要使用到限位传感器、光电传感器、按钮开关等传感器,以及电机、电磁铁等执行器。
三、软件设计1. 硬件初始化利用单片机的IO口和定时器等硬件资源,对电梯模拟电路进行初始化配置。
2. 状态监测设计状态监测程序,对电梯的各种状态进行实时监测,如电梯位置、乘客的楼层选择等。
3. 按钮控制编写按钮控制程序,实现乘客按下楼层选择按钮后,电梯能够自动前往相应楼层。
4. 运行控制编写电梯的运行控制程序,实现电梯的上行、下行等基本运行状态。
四、系统测试与调试1. 硬件连接测试将单片机与电梯模拟电路进行连接,进行硬件连接测试,确认各个元器件的连接正确性。
2. 软件功能测试对系统的各个功能进行测试,包括按钮控制、运行控制、状态监测等功能。
3. 整体系统测试将硬件和软件部分进行整合测试,测试系统的整体运行情况。
4. 系统调试对系统进行调试,排除各种可能出现的问题和故障,确保系统的稳定性和可靠性。
五、系统优化与改进在系统测试和实际应用中,根据用户的反馈和实际需求,对系统进行优化和改进,提高系统的性能和用户体验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的电梯控制系统
————————————————————————————————作者:————————————————————————————————日期:
1 课题概述
1.1课题的主要研究内容及设计步骤
本课题的主要任务是完成一个电梯系统的调度模块,即根据每个楼层不同顾客的按键需求,让电梯做出合理的判断,正确高效地知道电梯完成各项载客任务。
根据此任务,本课题需要研究的内容有:
1、根据系统的技术要求,进行系统硬件的总体方案设计;
2、学习单片机的相关知识,并且加以运用;
3、选择恰当的芯片,并对其内部协议有所掌握,便于应用。
4、研究C语言编程,并且规定电梯的工作规则,用C语言加以实现;
5、对软件和硬件进行调试,让其协调工作,完成指定任务。
结合以上内容,本课题的设计方案步骤如下:
关于硬件部分:
首先,对实际的电梯系统进行模拟,一般情况下,一个电梯应该具备相关按键、显示二极管、数码管等,由于这是一个调度模块,故没有设计具体的轿厢等机械部分。
然后,结合这些实物,选择恰当的芯片,并分成若干模块,安排好各自之间的关系。
接着,要完成电路图的设计,画出PCB板,焊接相关器件后进行硬件调试,看是否好用并加以适当的更正。
关于软件部分:
关于电梯调度时所遵循的原则作出规定,其必须基于高效与人性化两个原则。
最后是使用C语言将规定程序化,以便电梯真正的运作。
当然,二者的关系并不是分离的,它们是相辅相成,硬件依据软件来验证,软件依据硬件来调试。
经过一个个的发现问题、一个个的解决问题,最终做出完美的电梯调度模块。
1.2课题的开发环境简介
1.2.1电路图制作软件proteus 7.2
Proteus是目前最好的模拟单片机外围器件的工具,因此在仿真和程序调试时,关心的不再是某些语句执行时单片机寄存器和存储器内容的改变,而是从工程的角度直接看程序运行和电路工作的过程和结果。
对于这样的仿真实验,从某种意义上讲,是弥补了实验和工程应用间脱节的矛盾和现象。
1.2.2C51的程序开发软件Keil
Keil C51 软件是众多单片机应用开发的优秀软件之一,它集编辑,编译,仿真于一体,支持汇编,PLM 语言和 C 语言的程序设计,界面友好,易学易用。
2 方案论证
2.1 设计功能要求
本设计是为一六层电梯设计一调度系统,即使电梯能够合理高效地运行,完成各楼层顾客的接送任务。
形象地说,就是要应对不同楼层顾客的不同需求,作出合理高效的判断,使所有顾客在整体运用时间最短的条件下将其运往各自的目的地。
这个设计的成品应该可以作为真实电梯的控制系统一样,遵守以下两个原则:一是高效性,二是人性化。
而实际电梯所面临的情况无比复杂,故本设计的难点除了硬件上面外,还有对这些复杂的情况归类化,分为若干个基本情况,另外是用恰当的C语言描述来表达这些复杂的逻辑。
核心处两个步骤:第一判断电梯是上行还是下行;第二,判断是去接人还是去送人。
2.2 系统的结构框图
图2-1 系统的结构框图
如上图2-1所示,楼层电梯呼叫按键就是楼层外面的上行、下行按键,有需求时即可按下;电梯内呼叫按键就是电梯内部的数字按键,它是内部按键需求的输入;
单片机就是整个系统的核心,接收输入信息,经过处理后输出信息;楼层显示数码管就是接收单片机处理的信息,显示此时的楼层数;电梯状态指示灯就是接收单片机处理的信息,显示电梯的状态:上升、下降、停止。
电动机的驱动和控制就是接收单片机的PWM脉冲信号来控制驱动器,进而控制电动机的正反转,使电动机牵引电梯做上下运动。
3 系统的硬件设计
电梯最底层为1楼,因此在1楼仅有上升按键,而电梯最高层为6楼,因此6楼应仅有下降按键。
其他楼层则既有上升按键,也有下降按键。
在电梯内部按键设置方面,则应有1~6楼的各层选择按键。
按键的一端接地,另一端通过集成电路芯片连至单片机引脚。
这里,由于按键数量很多,又要求电梯控制系统能以最快速度响应按键的需求,因此,所有按键通过与门连接单片机。
用五片双4输入与门74LS21即可实现16个按键对象的集体与运算的最终结果,按键动作最终是送到单片机的INT0端。
即:
INT0←(P1.0*P1.1*P1.2*P1.3)*(P1.4*P1.5*P1.6*P1.7)*(P3.0*P3.1*P2.0*P3.3)*(P3.4*P3.5*P2.1*P2.2)
无论哪一个按键有动作,低电平信号就会送到INT0端,从而引发外部中断0服务子程序运行。
当定时器0中断时,单片机向电动机发送PWM脉冲信号,电动机接到脉冲信号后,经过驱动器的驱动,电动机便牵引电梯上下运动。
电梯的楼层显示用七段数码管完成显示。
本设计电梯只有6层,因此用七段数码管即可,数码管的显示数据通过单片机的P0口来进行传送。
设计中要求数码管随着电梯的位置变化而变化,即数码管显示数据要与楼层数同步,因此数码管的片选线直接连接地,而不需要再选择。
电梯升降的状态用上升和下降指示灯来进行显示,通过单片机的P3.7和P3.6引脚分别连接上升和下降指示灯的负极,其正极均连接至系统正电源处。
3.1单片机最小系统模块
在本设计中,最小系统应该包括:单片机、晶振电路、复位电路。
如图3-1所示,晶振电路由C3与C2和晶振组成。
C3与C2是两个30pF的瓷片电容接地用来削减偕波对电路的稳定性的影响。
复位电路采取的为手动按键复位电路,由电容
C13,电阻R1、C1和开关RESET组成,当单片机的复位引脚RESET出现2个机器周期以上的高电平时,单片机就执行复位操作。
图3-1 单片机的最小系统
3.2电动机的选择
我们选用三相异步电动机来做电梯的动力装置,因为国产Y系列的电动机具有高效、节能、特性好及低噪声等优点,我们将选用国内最先进的Y系列异步电动机。
这里我们选用Y100L24三相异步电动机,因为它还具有性能好、寿命长、可靠性高、维护方便、启动转矩大等优点,其功能参数为额定电压380V,额定频率50HZ,额定功率3000W,额定转速1400转/分。
如图3-2,在PROTEUS 中,我们选用的普通的MOTOR-BCD代替进行仿真。
图3-2电动机正反控制电路
3.3中断电路
图3-3 中断电路图
中断电路如上图3-3所示。
图中外部0中断INT0与74LS21与门相接,低电平有效,所以当单片机接电源后,P1.0~P1.3引脚此时为高电平,当任一按键按下后,相应的中断输入口直接与地相接,高电平变为低电平,外部0中断立即响应,单片机系统进入中断控制子程序系统,在中断服务子程序中做出相应的执行指令。
3.4 数码管显示模块
图3-4 数码管显示电路
七段数码管外形如图3-4所示,即左边的7个引脚跟单片机P0口相接,下边的引脚连接地。
楼层内外分别用一个7段数码管显示,可以共用一个P0口。
3.5 按钮控制电路模块
图3-5电梯不同楼层的按钮
如图3-5所示,按键显示电路模块包括电梯内部的按钮和每层楼的上下按钮,这些按钮一端与地相接,一端又与单片机和与门74LS21相接,外部0中断低电平有效,这样可以实现模拟按键的自如操作。
3.6 报警电路
如图3-6所示,电梯内添加手动报警电路,假若电梯发生故障,电梯内的人可自行发出报警信号,向外界求救。
该电路接在单片机的P2.7口。
图3-6电梯不同楼层的按钮
3.7 模拟电路图
如下图3-7所示,电路原理图包括状态指示灯模块、内外按键模块、中断电路模块、单片机的主要外围模块、数码管显示模块和电动机驱动控制模块、报警模块。
P0口的P0.1~P0.6引脚与数码管模块相接,P2口的P2.4~P2.7引脚与电动机驱动控制模块相接,P3口的P3.2引脚与中段电路模块相接,P1口的P1.0~
P1.7引脚、P3.0~P3.1引脚、P3.3~P3.5引脚分别与对应的内外按键模块相接,P3.6~P3.7引脚与状态指示灯模块相接。
图3-7 模拟电路原理图
4系统的软件设计
从程序功能上来分,本设计的高层软件程序大概可以分为以下几类:一、运行与决策函数;二、中断处理函数;三、置位各状态变量函数;
其中,第一类函数起作用于按键按下的时刻,当有按键按下时,通过74LS21以中断的方式发送给单片机,此时,单片机即对程序中所用到的各个状态变量进行置位并且点亮相关发光二极管,如置位按键所对应的去向变量等,方便决策函数使用。
第二类函数起作用于电梯到达目标楼层时,这时函数负责把相关发光二极管熄灭,并且及时清除相关状态位,以免影响判别函数作出正确判断。
第三类函数是程序的核心。
它直接负责管理电梯下一次所要到达的楼层,并且要基于短时间、高效率、人性化等原则。
每当电梯经过一楼层时,此函数即会被调用,然后返回一个变量名为aim的值,它即为下一个电梯要停留的目标楼层值。
4.1单片机中断处理函数
本设计主要用到了单片机的中断系统。
当有按键按下时,利用函数将键值存储起来,并在单片机引脚输出高电平发出中断进行相关处理。
中断的相关设置以及中断处理如图4.1所示。