7.机器人基本指令
ABB机器人常用指令详解-中文
ABB机器人RAPID常用指令详解-中文1.88.MoveAbsJ—把机器人移动到绝对轴位置用途:MoveAbsJ(绝对关节移动)用来把机器人或者外部轴移动到一个绝对位置,该位置在轴定位中定义。
使用实例:● 终点是一个单一点● 对于IR6400C中的不明确的位置,例如携带超过机器人范围的工具运动。
MoveAbsJ 指令中机器人的最终位置,既不受工具或者工作对象的影响,也不受激活程序更换的影响。
但是机器人要用到这些数据来计算负载、TCP速度和转角点。
相同的工具可以被用在相邻的运动指令中。
机器人和外部轴沿着一个非直线的路径移动到目标位置。
所有轴在同一时间运动到目标位置。
该指令只能被用在主任务T_ROB1中,或者在多运动系统中的运动任务中。
基本范例:该指令的基本范例说明如下。
也可参看第207 页更多范例。
例1 MoveAbsJ p50, v1000, z50, tool2;机器人将携带工具tool2 沿着一个非线性路径到绝对轴位置p50,以速度数据v1000和zone数据z50。
例2 MoveAbsJ *, v1000\T:=5, fine, grip3;机器人将携带工具grip3 沿着一个非线性路径到一个停止点,该停止点在指令中作为一个绝对轴位置存储(用*标示)。
整个运动需要5秒钟。
项目:MoveAbsJ [\Conc] ToJointPos [\ID] [\NoEOffs] Speed [\V] | [\T] Zone [\Z] [\Inpos] Tool [\Wobj][\Conc]:并发事件数据类型:switch当机器人正在移动的时候执行的后续指令。
该项目通常不使用,但是当和外部设备通讯、不需要同步的时候可以用来缩短循环周期。
当使用项目\Conc的时候,连续运动指令的数量限制为5。
在包含StorePath-RestoPath的程序段中不允许包含项目\Conc的运动指令。
如果该项目忽略并且ToJointPos不是一个停止点,在机器人到达程序zone之前一段时间后续指令就开始执行了。
ABB机器人~编程基本指令之运动指令

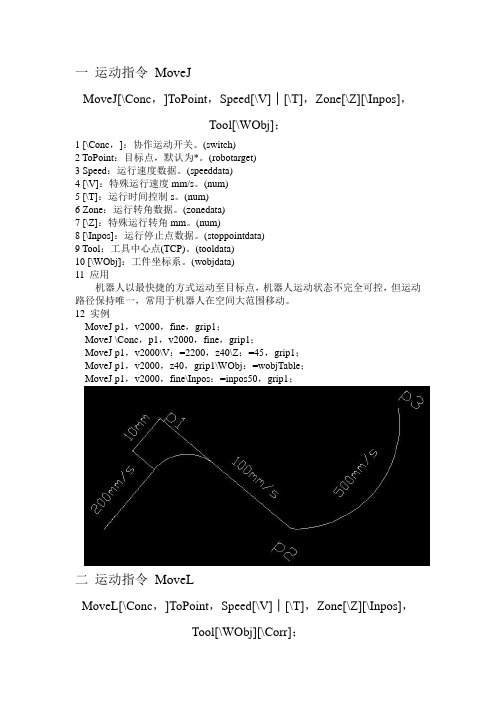
一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
(wobjdata)11 应用机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。
12 实例MoveJ p1,v2000,fine,grip1;MoveJ \Conc,p1,v2000,fine,grip1;MoveJ p1,v2000\V:=2200,z40\Z:=45,grip1;MoveJ p1,v2000,z40,grip1\WObj:=wobjTable;MoveJ p1,v2000,fine\Inpos:=inpos50,grip1;二运动指令MoveLMoveL[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
公开课机器人运动指令

思考:Z值在工业生产中的意义
六、小结
起笔收笔回上方
开始结束在工作原点
合理使用 MoveLMoveJ
七、作业
八、拓展思考
观察指令: Move L P10 V100 Z50 tool1/Wobj1
Move L P20 V100
fine P10
tool1/Wobj1
50mm
50mm
100mm/s
Z值: 逼近但不到达
fine:精确到达
机器人手臂是怎样动的?有几种运动方式?
二、理论讲解
工业机器人在空间进行运动主要有四种方式,关节 运动(MoveJ),线性运动(MoveL),圆弧运动 (MoveC)和绝对运动(MoveABSJ)
二、理论讲解 1、线性运动指令 MoveL (1)直线 (2)讨论:工业 生产中用到该指 令的机器人操作 有哪些?
P10
直线运动路径
P20
生产实例
弧 焊
激 光 切 割
玻 璃 涂 胶
二、理论讲解
2、关节运动指令(Mo veJ) (1)不一定直线,路 径随机 (2)大范围运动,路 径要求不高,不易出 现奇异点 (3)讨论:工业生产 中用到该指令的机器 人操作有哪些?
P10
P20
关节运动路径
生产实例
码 放 货 物
搬 运 纸 箱
分 拣 牙 刷
两个轨迹区别
二、理论讲解
3、指令讲解
参数
MoveL
பைடு நூலகம்
含义
指令名称
P10,P20 目标点位置 v1000 z50 tool1 wobj1 运动速度(mm/s) 转弯区半径(mm) 工具坐标数据 工件坐标数据
工业机器人常用的运动指令 -回复

工业机器人常用的运动指令-回复标题:工业机器人常用的运动指令详解在现代工业生产中,工业机器人已经成为不可或缺的一部分。
它们能够执行各种复杂的任务,提高生产效率,保证产品质量。
而这一切的基础,就是工业机器人所使用的运动指令。
以下我们将详细解析工业机器人常用的运动指令。
一、基础运动指令1. 直线运动指令(Linear Move):这是最基本的运动指令,用于指示机器人沿直线从一个位置移动到另一个位置。
该指令需要指定起点和终点的坐标,以及期望的运动速度和加速度。
2. 关节运动指令(Joint Move):与直线运动指令不同,关节运动指令是通过控制机器人的各个关节来实现运动的。
这种指令通常用于需要精确控制机器人姿态的情况。
3. 圆弧运动指令(Circular Move):该指令用于让机器人沿着圆弧路径移动。
需要指定圆弧的起点、终点和圆心坐标,以及期望的运动速度和加速度。
二、复合运动指令1. 平移运动指令(Translation Move):这是一种复合运动指令,用于让机器人在保持自身姿态不变的情况下,沿某个方向进行平移。
2. 旋转运动指令(Rotation Move):这也是一个复合运动指令,用于让机器人在保持自身位置不变的情况下,绕某个轴进行旋转。
三、特殊运动指令1. 点位运动指令(PTP Move):点位运动指令是指机器人从一个点快速移动到另一个点的运动方式,常用于需要快速定位的场合。
2. 连续轨迹运动指令(CP Move):连续轨迹运动指令是指机器人在运动过程中,其各关节的速度和加速度保持连续变化,从而使得机器人能够沿着平滑的轨迹运动。
3. 指定速度运动指令(Velocity Move):这种指令允许用户直接指定机器人的运动速度,而不是具体的运动路径。
机器人将根据这个速度信息自行计算出合适的运动路径。
四、高级运动指令1. 力控运动指令(Force Control):力控运动指令可以让机器人在执行任务时,能够感知并控制作用在其上的力,这对于需要精细操作的任务非常有用。
KUKA机器人程序命令

KUKA机器人程序命令一、概述KUKA机器人是一种广泛应用于工业自动化领域的机器人,其高度的灵活性和适应性使得它在众多行业中都有广泛的应用。
为了能够控制和使用KUKA机器人,我们需要通过编写程序来对其进行操作。
下面将介绍一些常用的KUKA机器人程序命令。
二、基本命令1、PTP(Point to Point):这是最基本的运动指令,可以控制机器人在空间的任意两点之间进行运动。
PTP指令需要指定起始位置和目标位置,机器人会以最短路径的方式进行移动。
2、LIN(Linear):这个指令可以让机器人在两点之间进行线性插补。
与PTP指令不同,LIN指令可以让机器人在两点之间进行速度和加速度的插补,实现更加平滑的运动。
3、SCUR(Scaled Curvilinear):这个指令可以让机器人在两点之间进行曲线插补。
SCUR指令可以让机器人在两点之间进行速度和加速度的插补,实现更加平滑的运动。
4、STOP:停止指令用于停止机器人的运动。
当执行STOP指令时,机器人会立即停止当前的运动。
三、高级命令1、MOVE_L:这是一个高级运动指令,可以让机器人在两个目标点之间进行线性插补。
与LIN指令相比,MOVE_L指令可以同时指定多个目标点,让机器人按照预设的路径进行运动。
2、MOVE_P:这是一个高级运动指令,可以让机器人在两个目标点之间进行曲线插补。
与SCUR指令相比,MOVE_P指令可以同时指定多个目标点,让机器人按照预设的路径进行运动。
3、ARC:这是一个高级运动指令,可以让机器人在两个目标点之间进行圆弧插补。
ARC指令可以让机器人在两点之间进行速度和加速度的插补,实现更加平滑的运动。
4、JMP(Jump):这是一个高级控制指令,可以让机器人在两个目标点之间进行跳跃式运动。
JMP指令需要指定起始位置、目标位置和跳跃高度等参数,机器人会以最短路径的方式进行跳跃式运动。
四、程序结构在编写KUKA机器人程序时,需要遵循一定的程序结构。
scara机器人各组成单元基本功能、操作方法及常用指令

一、scara机器人各组成单元基本功能1. 前置设备组成:scara机器人通常由基座、臂部、手部和控制系统组成。
基座用于支撑整个机器人,臂部和手部负责执行各项任务,控制系统则是整个机器人的“大脑”。
基础设备的设计和功能会直接影响机器人的性能和适用范围。
2. 机械臂:scara机器人通常使用具有水平关节的机械臂,使得机械臂在平面内能够高效地执行各项任务。
机械臂的关节灵活度和稳定性是其基本功能,直接影响着机器人的精准度和稳定性。
3. 手部夹具:scara机器人手部通常配有夹具,用于抓取、移动和放置物体。
夹具的设计和功能对机器人的灵活性和适用性有着重要影响,不同类型的夹具可以使机器人适用于不同的任务场景。
4. 控制系统:scara机器人的控制系统可以通过编程来指导机器人执行各种任务,包括移动、抓取、放置等。
控制系统的智能化程度和稳定性对于机器人的操作效率和准确性有着重要影响。
二、scara机器人的操作方法1. 编程操作:scara机器人通常可以通过编程来指导执行任务,编程可以采用代码编写、图形化编程等不同方式。
编程操作需要对机器人的控制系统有较深的了解,适用于对机器人有一定了解或需要执行复杂任务的场景。
2. 手动操作:scara机器人也可以通过手动操作来执行任务,手动操作通常可以通过操控面板、遥控器等方式进行。
手动操作简单直观,适用于对机器人不太了解或执行简单任务的场景。
三、scara机器人的常用指令1. 移动指令:机器人移动是其最基本的操作之一,常用的移动指令包括直线移动、旋转移动等。
通过移动指令可以使机器人达到指定位置,执行相应任务。
2. 夹取指令:夹取是机器人常见的操作之一,通过夹取指令可以使机器人抓取目标物体并将其移动至指定位置。
3. 放置指令:放置是机器人的另一常见操作,通过放置指令可以使机器人将目标物体放置到指定位置。
四、scara机器人总结与个人观点总体来看,scara机器人作为自动化生产设备,在工业制造和物流领域有着广泛的应用。
ABB机器人常用指令详解-中文(一)

使用项目\Conc 的时候,连续的运动指令的数量限制为 5 个。在包括 StorePath—RestorePath 的程序段中不 允许使用带有\Conc 项目的运动指令。
[\Conc]: 并发事件
数据类型:switch 当机器人正在移动的时候执行的后续指令。该项目通常不使用,但是当和外部设备通讯、不需要同步的时
候可以用来缩短循环周期。
当使用项目\Conc 的时候,连续运动指令的数量限制为 5。在包含 StorePath-RestoPath 的程序段中不允许包
含项目\Conc 的运动指令。
机器人将携带工具 grip3 沿着一个非线性路径到一个停止点,该停止点在指令中作为一个绝对轴位置存储 (用*标示)。整个运动需要 5 秒钟。 项目:
MoveAbsJ [\Conc] ToJointPos [\ID] [\NoEOffs] Speed [\V] | [\T] Zone [\Z] [\Inpos] Tool [\Wobj]
例 2 MoveC *, *, v500 \T:=5, fine, grip3; Grip3 的 TCP 沿圆周运动到存储在指令中的 fine 点(第二个*标记)。中间点也存储在指令中(第一个*标记)。 整个运动需要 5 秒钟。
例 3 MoveL p1, v500, fine, tool1; MoveC p2, p3, v500, z20, tool1; MoveC p4, p1, v500, fine, tool1;
by 张建辉, 韩鹏排版
数据类型:num 该项目用来在指令中直接指定机器人 TCP 的位置精度。转角路径的长度用毫米给出,替代 zone 数据中指 定的相应数据。 [\Inpos ]: 到位 数据类型:stoppointdata(停止点数据) 改项目用来指定机器人 TCP 在停止点位置的收敛性判别标准。该停止点数据代替在 zone 参数中指定的 zone。 Tool: 数据类型:tooldata 运动过程中所携带的工具。 TCP 的位置和工具的负载在工具数据中定义。TCP 位置用来计算运动的速度和转角路径。 [\Wobj ]: 工作对象 数据类型:wobjdata 在运动过程中使用的工作对象。 如果机器人抓着工具的时候,该项目可以忽略。但是,如果机器人抓着工作对象, 也就是说工具是静止的, 或者带有外部轴,那么该项目必须指定。 在有并列工具或者有并列外部轴的情况下,系统使用该数据计算运动的速度和转角路径,该数据在工作对 象中定义。 程序执行: MoveAbsJ 运动不会受激活的程序转移的影响,并且如果使用了可选项目\NoEOffs,将没有外部轴的偏移。 如果不使用\NoEOffs,外部轴的目标位置将会受到激活的外部轴偏移的影响。工具按照轴角度插补移动到绝对 轴目标位置。这就是说每一个轴都按照固定的速度运动,并且所有轴都在同一时间到达目标位置,这样就形成 一个非线性的路径。 总的来说,TCP 大约按照编程的速度运动。在 TCP 运动的同时,工具重新定向,并且外部轴也在运动。如 果重新定向的或者外部轴的程序要求的速度不能达到,TCP 的速度将被减小。 当转换到路径的下一段的时候通常会产生转角路径。如果停止点在 Zone 数据中指定,只有在机器人和外部 轴到达合适的轴位置的时候程序才能继续执行。 更多范例: 关于如何使用该指令,更多范例说明如下:
07 模块7 工业机器人操作与编程

课题:模块7工业机器人操作与编程
课型:新授课
课时:
本章安排4个课时。
教学过程:
1.教学形式:讲授课,教学组织采用课堂整体讲授和分组演示。
2.教学媒体:采用启发式教学、案例教学等教学方法。教学手段采用多媒体课件、视频等媒体技术。
板书设计:
本课标题
模块7工业机器人操作与编程
(一)编程方式
由于机器人的控制装置和作业要求多种多样,国内外尚未制订统一的机器人控制代码标准,所以编程语言也是多种多样的。目前,在工业生产中应用的机器人编程方式主要有以下几种形式:
1.顺序控制的编程
在顺序控制的机器中,所有的控制都是由机械的或电气的顺序控制器实现的,一般没有程序设计的要求。顺序控制的灵活性小,这是因为所有的工作过程都已预先编好——可由机械挡块或其他确定的办法所控制。这种方法的主要优点是成本低、易于控制和操作。
(二)信号监控
信号监控指令分信号监视和信号控制两部分。信号监视指令可用于读取机器人控制系统关联的信号对应的状态,包括数字信号的电平、模拟信号的大小等。信号控制指令主要用于控制机器人系统的数字量输出信号和模拟量输出信号,能够置位或置反数字量输出信号并设置模拟量输出信号的大小。
(三)逻辑控制
逻辑控制指令用于控制程序的运行逻辑,如循环、条件判断、计算、跳转等。
单元2工业机器人编程
一、工业机器人编程概述
为了让工业机器人按照一定的流程自主地完成相关作业,我们需要为工业机器人编写一套指令的有序集合。编写指令的过程就是工业机器人编程。
指令流程:
1.机器人夹爪到达铁块正上方。
2.打开夹爪。
3.夹爪到达铁块夹取位置place1。
4.夹爪闭合,夹住铁块。
ABB机器人-编程基本指令之运动指令
一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
(wobjdata)11 应用机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。
12 实例MoveJ p1,v2000,fine,grip1;MoveJ \Conc,p1,v2000,fine,grip1;MoveJ p1,v2000\V:=2200,z40\Z:=45,grip1;MoveJ p1,v2000,z40,grip1\WObj:=wobjTable;MoveJ p1,v2000,fine\Inpos:=inpos50,grip1;二运动指令MoveLMoveL[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
工业机器人通信基础知识
图7-15信号类型选择
标准I/O板—DSQC651板的配置
( 5 )双击“ Type of Unit ”选择“ d651 ”,然后单击 “确定”。如图7-16。
图7-16指定信号所在板
标准I/O板—DSQC651板的配置
标准I/O板—DSSQC651板的离线配置 1、离线定义标准I/O板 (1)选择界面上的功能选项卡,单击“PAPID”,如图732所示。
图7-32离线定义标准I/O板
标准I/O板—DSSQC651板的离线配置 (3)在弹出的对话框中,按照以下的数值进行设置, 之后便点击确定便可设定信号参数。
图7-39离线定义数字输入信号
机器人I/O控制指令 (4)WaitDO数字输出信号判断指令 WaitDO数字输出信号判断指令用于判断数 字输出信号的值是否与目标一致。指令如 下: WaitDO do1,1;等待,直到输出信号do1 为1,方才跳到下一步骤。 具体参数说/O控制指令
(5)WaitTime时间等待 WaitTime为时间等待指令,即等待时间到 达你所设定的时间。指令如下: WaitTime 1;等待1s后执行下一动作。 (6):=赋值指令,即对程序数据进行赋值。 (7)Stop停止指令,即停止程序执行。
标准I/O板—DSQC651板的配置 ABB的标准IO板提供的常用信号处理 有数字输入DI、数字输出DO、模拟输入 AI、模拟输出AO以及输送链跟踪。本项 目以最常用的ABB标准IO板DSQC651为例 进行,进行详细的讲解如何进行相关的参 数设定。DSQC651板提供八个DI,如表71所示,八个DO, 如表7-1所示。这里主 要对数字量进行精讲,对模拟量和组信号 做基本的设置介绍所以端口不做介绍。
ABB机器人简单操作指南

ABB机器人简单操作指南1.了解机器人的基本结构和组成部件ABB机器人主要由机械臂、控制柜和操作面板组成。
机械臂由多个关节组成,每个关节都由伺服电机驱动,带有编码器进行位置控制。
控制柜是机器人的主要电子控制单元,包含电源、电机驱动器、控制卡和各种传感器。
操作面板用于对机器人进行各种操作和设置。
2.连接机器人和控制柜将机器人和控制柜连接在一起。
确保所有的连接器正确连接,并检查电源是否正常连接。
确保机器人和控制柜间的通信正常。
3.打开控制柜电源打开控制柜电源并等待机器人完成初始化。
在初始化过程中,机器人会进行自检和各种安全检查。
确保在机器人完成初始化之前不要进行任何操作。
4.设置机器人的工作区域使用操作面板进入机器人的设置菜单,设置机器人的工作区域。
可以设置工作区域的大小、位置和限制等。
5.创建机器人程序使用ABB机器人编程软件创建机器人程序。
机器人程序由一系列的指令组成,用于控制机器人的运动和操作。
可以使用编程语言或者图形化编程界面来创建机器人程序。
6.上传机器人程序将机器人程序上传到机器人控制柜中。
使用操作面板或者软件界面进行程序上传,并等待上传完成。
7.设置机器人的运动参数在机器人程序中设置机器人的运动参数,如速度、加速度和遵从度等。
这些参数会影响机器人的运动效果和安全性。
8.执行机器人程序使用操作面板或者远程控制软件执行机器人程序。
确保在执行程序之前,机器人周围没有任何障碍物,并确保机器人能够自由移动。
9.监控机器人的运行状态在执行机器人程序时,通过操作面板或者远程控制软件监控机器人的运行状态。
可以查看机器人的姿态、速度和位置等信息。
10.进行机器人的维护和保养定期进行机器人的维护和保养工作,如清洁机械臂、检查电源和连接器等。
确保机器人的各个部件处于良好的工作状态。
总结:以上是ABB机器人的简单操作指南。
了解机器人的基本结构和组成部件,连接机器人和控制柜,打开控制柜电源并等待机器人完成初始化,设置机器人的工作区域,创建和上传机器人程序。
工业机器人程序编辑与指令
可以在程序编辑画面内对以下指令的注释进行显/隐藏切换。但是,不能对注释进行编辑: • DI指令、DO指令、RI指令、RO指令、GI指令、GO指令、AI指令、AO指令、UI指令、UO指令、SI指令,
SO指令; • 寄存器指令; • 位置寄存器指令(包含动作指令的位置数据格式的位置寄存器); • 码垛寄存器指令; • 动作指令的寄存器速度指令;
图 7-3
7.2 动作指令
(2)直线动作L 直线动作是以线性方式对从动作开始点到结束点的工具中心点移动轨迹进
行控制的一种移动方法,其动作示意如图 7-4。在对结束点进行示教时记述动 作类型。直线移动速度的指定,从 mm/sec、cm/min、inch/min、sec、msec 中 予以选择。将开始点和目标点的 姿势进行分割后对移动中的工具姿势进行控制。
系由此而确定。 (1)0 :使用世界坐标系。 (2)1 ~ 9 :使用所指定的用户坐标系号码的用户坐标系。 (3)F :使用当前所选的用户坐标系号码的坐标系。 6. 详细位置数据
要显示详细位置数据,将光标指向位置号码,按下 F5“位置”,显示输入如图 7-9。
图 7-9 详细位置数据
7.2 动作指令
图 7-6
7.2 动作指令
注:第三点的记录方法: 记录完P[2]后,会出现: 2:C P[ 2 ] P[ … ] 500mm/sec FINE
将光标移至P[…]行前,并示教机器人至所需要的位置,按【SHIFT】+ F3 【TOUCHUP】记录圆弧第三点。
7.2 动作指令
(4)C圆弧动作A 圆弧动作指令下,需要在 1 行中示教 2 个位置也即经过点和终点,C 圆弧动作指
Copy/Cut (复制/剪切)
复制/剪切程序语句:先复制/剪切一连串的程序语句集,然后粘贴到程序中的其它位置。复制程序语句时,选 择复制源的程序语句范围,将其记录到存储器中。程序员语句一旦被复制,可以多次插入粘贴使用。
ABB机器人常用指令详解-中文(二)
关节 目 标( jointt jointtarget -关节 位置数据
速度 的定义
第 1010 页 speeddata— 速度数据
Zone 数据 的定义 运动 综 述
第 1047 页 zonedata— zone 数据 RAPID 参考手册 — RAPID 概述,运动和 I/O 原理部分
总 的来说, TCP按照大约 的编 程 速度 运动( 无论 是 否 并列了 外部轴)。 在 TCP运动的同 时, 工具重新 定 向 , 外部轴也 在运 行 。如果 不 能 达到 工具重新 定 向 或者外部轴的 编 程的 速度 , TCP的 速度 将降低 。
当 运动 路径 转 到下一 段 的时候 , 通常 会产生 转 角路径 。如果 在zone数据中 指定 了停止点 ,只有 当 机 器人 和 外部轴 到达 合适 的 位置 的 时候 ,程序 执行 才会继 续 。
使用 项目 \Conc 的 时候 ,连续 的运动指令的 数量限 制为 5 个。 在包括 StorePath— RestorePath 的程序 段中不 允许 使用带有 \Conc 项目 的运动指令。
如果 不使用该 项目 ,并且 ToPoint 不是停止点 ,在 机 器人到达 程序 zone 之前 一 段时间后续 指令 就开始执行
[\T] : 时间 数据类型 : num 该 项目 用来指定外部轴运动的 总 时间 ,单 位秒 。 它代替 相 应 的速度数据 。
Zone: 数据类型 : zonedata 运动的 zone 数据 。 它描 述 产生 的转 角路径 的 大小 。
[\Z] : Zone 数据类型 : num 该 项目 用来 在 指令 中直接 指定机 器人 TCP 的 位置 精 度。转 角路径 的 长度 单 位是 mm,它代替 zone 数据中相
ABB机器人的程序数据要点

ABB机器人的程序数据要点1.程序指令:-ABB机器人的程序通常由基本指令组成,如移动、旋转、控制等。
- 移动指令包括直线移动(MoveL)、圆弧移动(MoveC)等,用于机器人的路径规划。
- 旋转指令包括旋转(Rotate)和朝向(Orient)等,控制机器人的朝向和姿态。
- 控制指令用于控制机器人的操作流程,如条件判断(If)、循环(Loop)等。
2.坐标系:- ABB机器人使用基于DH(Denavit-Hartenberg)参数的坐标系来描述机器人的位置和姿态。
- 坐标系由基点(Base)、工具(Tool)和用户定义的坐标系(Wobj)组成。
-基点是机器人的基准位置,工具是机器人的末端执行器,用户定义的坐标系用于特定任务或对象。
3.速度:-ABB机器人的速度指定机器人的运动速度,包括关节速度和末端速度。
- 关节速度(Speed)指定机器人各个关节的运动速度,单位为°/s或rad/s。
- 末端速度(Tool Speed)指定机器人末端执行器的运动速度,单位为mm/s。
4.路径规划:-路径规划是指机器人在执行任务时如何规划运动路径,以达到最佳效果。
-ABB机器人的路径规划通常使用直线插值和圆弧插值。
- 直线插值(Linear Interpolation)用于在直线路径上进行均匀的插值运动。
- 圆弧插值(Circular Interpolation)用于在圆弧路径上进行均匀的插值运动。
5.传感器数据:-ABB机器人可以与各种传感器进行连接,包括视觉传感器、力传感器等。
-视觉传感器可以用于机器人的视觉定位、目标检测等任务。
-力传感器可以用于机器人的力控制、物体抓取等任务。
-传感器数据可以通过机器人的IO接口进行读取和控制。
6.通信接口:-ABB机器人通常可以通过以太网、RS232等接口与外部设备进行通信。
-以太网接口用于机器人与上位控制系统、其他设备之间的数据交换。
-RS232接口用于机器人与外部设备之间的串行通信。
猫耳直播间机器人指令大全[001]
![猫耳直播间机器人指令大全[001]](https://img.taocdn.com/s3/m/5ba275643a3567ec102de2bd960590c69fc3d870.png)
猫耳直播间机器人指令大全猫耳直播间是一个非常受欢迎的直播平台,有许多机器人可以帮助主播和观众进行互动。
这些机器人能够执行各种指令,包括管理直播间、提供娱乐互动等。
下面是猫耳直播间机器人的指令大全,希望能够给大家带来帮助和指导。
1. 管理指令:- !封禁 [用户名] [时长]:封禁某个用户的账号,在直播间中不能进行任何操作,时长可以设置。
- !解封 [用户名]:解封被封禁的用户。
- !踢人 [用户名]:将某个用户从直播间中踢出。
- !禁言 [用户名] [时长]:禁言某个用户,在直播间中不能进行聊天操作,时长可以设置。
- !解禁言 [用户名]:解除某个用户的禁言状态。
2. 互动指令:- !点歌 [歌曲名]:点歌功能可以让观众选择自己喜欢的歌曲进行播放。
- !抽奖 [奖品]:开启抽奖功能,可以给观众送出一些小礼物或者奖品。
- !签到:观众可以通过签到指令参与主播设置的签到活动,获得一些积分或者礼物。
- !送礼 [用户名] [礼物名]:观众可以通过送礼指令给主播或其他观众送礼物,展示自己的支持和厚爱。
- !抢红包:主播可以发放红包,而观众可以通过抢红包指令参与抢夺,抢到的红包可以获得一些积分或者礼物。
3. 查询指令:- !排行榜:查询主播或观众的积分、等级等排行榜信息。
- !直播间信息:查询直播间的基本信息,包括观众数量、直播时长等。
- !用户信息 [用户名]:查询某个用户的基本信息,包括积分、等级等。
- !礼物信息 [礼物名]:查询某个礼物的相关信息,包括价值、使用方式等。
4. 其他指令:- !翻译 [语言] [内容]:可以将其他语言翻译为中文或其他语言。
- !笑话:机器人会讲一些搞笑的笑话给观众解乏。
- !提醒 [时间] [内容]:设置定时提醒功能,提醒主播或观众某件事情。
- !投票 [选项1] [选项2] ...:开启投票功能,可以让观众投票选择某个选项。
- !斗图:机器人会发送一些表情包或者有趣的图片给观众。
库卡机器人基坐标偏移指令
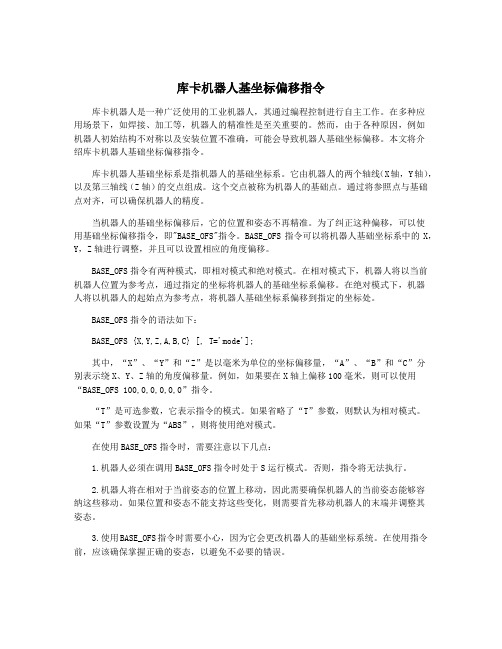
库卡机器人基坐标偏移指令库卡机器人是一种广泛使用的工业机器人,其通过编程控制进行自主工作。
在多种应用场景下,如焊接、加工等,机器人的精准性是至关重要的。
然而,由于各种原因,例如机器人初始结构不对称以及安装位置不准确,可能会导致机器人基础坐标偏移。
本文将介绍库卡机器人基础坐标偏移指令。
库卡机器人基础坐标系是指机器人的基础坐标系。
它由机器人的两个轴线(X轴,Y轴),以及第三轴线(Z轴)的交点组成。
这个交点被称为机器人的基础点。
通过将参照点与基础点对齐,可以确保机器人的精度。
当机器人的基础坐标偏移后,它的位置和姿态不再精准。
为了纠正这种偏移,可以使用基础坐标偏移指令,即"BASE_OFS"指令。
BASE_OFS指令可以将机器人基础坐标系中的X,Y,Z轴进行调整,并且可以设置相应的角度偏移。
BASE_OFS指令有两种模式,即相对模式和绝对模式。
在相对模式下,机器人将以当前机器人位置为参考点,通过指定的坐标将机器人的基础坐标系偏移。
在绝对模式下,机器人将以机器人的起始点为参考点,将机器人基础坐标系偏移到指定的坐标处。
BASE_OFS指令的语法如下:BASE_OFS {X,Y,Z,A,B,C} [, T='mode'];其中,“X”、“Y”和“Z”是以毫米为单位的坐标偏移量,“A”、“B”和“C”分别表示绕X、Y、Z轴的角度偏移量。
例如,如果要在X轴上偏移100毫米,则可以使用“BASE_OFS 100,0,0,0,0,0”指令。
“T”是可选参数,它表示指令的模式。
如果省略了“T”参数,则默认为相对模式。
如果“T”参数设置为“ABS”,则将使用绝对模式。
在使用BASE_OFS指令时,需要注意以下几点:1.机器人必须在调用BASE_OFS指令时处于S运行模式。
否则,指令将无法执行。
2.机器人将在相对于当前姿态的位置上移动,因此需要确保机器人的当前姿态能够容纳这些移动。
如果位置和姿态不能支持这些变化,则需要首先移动机器人的末端并调整其姿态。
abb机器人offs指令用法

abb机器人offs指令用法以下是 7 条关于“abb 机器人 offs 指令用法”的内容:1. 嘿,你可知道 abb 机器人的 offs 指令简直太好用啦!就好比你要让机器人去拿一个东西,你用 offs 指令就能微调它的位置呀!比如说,机器人要去抓取桌子上的杯子,你就可以用offs 来让它稍微偏一点去准确抓住,神奇吧!2. 哇塞,abb 机器人 offs 指令的用法真的能带来好多惊喜呢!想象一下,这就像给机器人安装了一个精准导航,让它能精确到毫厘呢!比如给机器人下达任务去安装一个小零件,通过offs 指令来微调位置,就能完美安装啦,是不是很厉害!3. 哎呀呀,abb 机器人的 offs 指令用起来可太有意思啦!就像给机器人开了个小后门,能让它走得更准呢!就像要机器人把一个小物件从这挪到那,用 offs 指令来一点一点调整,它就能乖乖听话做到啦,爽不爽!4. 嘿呀,你们想想看,abb 机器人的 offs 指令那可真是太神了呀!这不就像是给机器人一支魔法笔,能画出最精确的路线嘛!比如机器人要在一个复杂的环境中穿梭,用offs 指令来调整路径,它就能轻松通过啦,太牛了吧!5. 哇哦,abb 机器人的 offs 指令简直绝了呀!好似给机器人一把神奇的钥匙,能打开精准之门呢!像是让机器人去对接一个接口,用 offs 来微调角度,一下子就对上啦,厉害不厉害!6. 啊呀,abb 机器人 offs 指令真的值得好好探索呀!这不就像是给机器人装上了最敏锐的触角,能精确感知位置呀!假如让机器人去摆放一些物品,用 offs 指令来逐个调整摆放位置,多完美呀,难道不赞吗!7. 哎呀,abb 机器人 offs 指令真的是个宝贝呀!就跟给机器人戴上了一副超级瞄准镜一样!比如让机器人去进行一个精细的焊接,用 offs 指令来让它精确对好位置,焊缝漂亮极了,还能说这不够厉害吗!我的观点结论就是:abb 机器人的 offs 指令真的是超级实用且非常强大,学会用它能让机器人工作变得更加精彩和精确!。
机器人的IO指令

机器人可以通过图像识别和物体识别技术,识别物体的大小、形 状、颜色等信息。
语音识别
机器人可以识别语音指令,并将语音转换为文本或命令。
输出指令(Output)
01
控制执行器
机器人可以通过输出指令控制执 行器,如机械臂、轮子等,实现 各种动作。
显示信息
02
03
发送信息
机器人可以将信息显示在显示屏 或LED灯上,如文字、图像、声 音等。
加强安全防护
增加安全防护装置和安全控制功能,可以提 高机器人的安全性能。
06
未来展望
工业机器人发展趋势
智能化
随着人工智能和机器学习技术的 不断发展,工业机器人将具备更 高级的自主决策和学习能力,能 够更好地适应复杂的工作环境和
任务。
柔性化
未来的工业机器人将更加注重人 机协作,具备更高的灵活性和适 应性,能够与人类员工共同工作
随着人口老龄化和医疗技术的发展,工业机器人将在医疗保健领域发挥
重要作用,应用于康复训练、手术操作、护理服务等领域。
03
航空航天领域
工业机器人将在航空航天领域发挥重要作用,应用于卫星和空间站的组
装和维护、飞机零部件的制造和检测等环节,提高工作效率和安全性。
THANK YOU
特点
高效、精准、可编程、多用途、自动 化、安全性高。
工业机器人的应用领域
电子制造
物料搬运、表面贴 装、检测等。
食品包装
装箱、码垛、灌装 等。
汽车制造
焊接、涂装、装配 等。
物流运输
自动化仓库、分拣 、搬运等。
其他领域
医疗、航天、军事 等。
工业机器人的发展历程
第一代工业机器人
【精品】ABB机器人编程基本指令之运动指令
【关键字】精品一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
(wobjdata)11 应用机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。
12 实例MoveJ p1,v2000,fine,grip1;MoveJ \Conc,p1,v2000,fine,grip1;MoveJ p1,v2000\V:=2200,z40\Z:=45,grip1;MoveJ p1,v2000,z40,grip1\WObj:=wobjTable;MoveJ p1,v2000,fine\Inpos:=inpos50,grip1;二运动指令MoveLMoveL[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ENDIF
如果reg> 5条件满足,则执行Set Do1指令,否则Reset do1;
15
FOR:循环指令 根据指定的次数,重复执行对应的程序。
FOR i FROM 1 TO 10 DO Routinel;
ENDFOR 重复执行10次Routinel里的程序。 WHILE:判断指令
12
1、di—机器人数字输入信号 输入信号通常用于判断外部设备给机器人发送的信号。外围设备满
足某个条件才可以让机器人继续运行。 WaitDI:等待数字输入信号指令。
WaitDI di1,1; 当di1等于1时,机器人继续执行后面执行,否则一直等待。 2、do—机器人数字输出信号
输出信号有两种状态:1为接通;0为断开。
10
2、工件坐标偏移函数Reltool() 功能函数RelTool()坐标方向与机器人工具(Tool)坐标系方向一致。 程序: Movel RelTool(P1,100,50,0\Rx:=15\Ry:=45\Rz:=30),v100,z100,tool1; 注释: P1为开始位置; 100表示从开始位置沿X轴方向偏移100mm; 50表示从开始位置沿Y轴方向偏移50mm; 0表示从开始位置沿Z轴方向没有偏移; 15表示从开始位置绕X轴方向偏差角度为15度; 45表示从开始位置绕Y轴方向偏差角度为45度; 30表示从开始位置绕Z轴方向偏差角度为30度。
2、MoveL:线性运动,机器人以线性移动方式运动至目标点。 当前点与目标点二点决定一条直线,机器人运动状态可控制,且运动 路径唯一,但可能出现奇点。常用于机器人在工作状态下移动。
MoveL P3,v500,fine,tool1\wobj:=wobj0;
04
P3 P1
机器人
P2
工具
(源自:哈工海渡机器人学院)
11
2、读取当前位置CRobT()函数()
CRobT()根据提供的工具工件坐标系来读取当前位置参数功能。 读取当前机器人TCP位置数据。
PERS robtarget p10; p10:= CRobT(\Tool:= tool1\WObj := wobj0);
读取当前机器人TCP位置数据,指定工具数据为tool1,工件坐标数据 为wobj0(若不指定,则默认工具数据为tool0,默认工件坐标系数据为 wobj0),并将读取的目标点数据赋值给p10。
01
02
ABB机器人程序常用数据类型有3类:变量VAR、可变量PRES、常 量CONST。
1、变量VAR 变量型数据在程序执行的过程中和停止时,会保持当前的值。但 如果程序指针被移到主程序后,数据就会丢失。 2、可变量PRES 可变量PRES最大的特点是:无论程序的指针如何,都会保持最后赋 予的值。在机器人执行的RAPID程序中也可以对可变量存储类型数据进 行赋值操作,在程序执行以后,赋值的结果会一直保持,直到对其进行 重新赋值。
打印运行时间
限制: 机器人时钟计时超过4,294,967秒(即49天17小时2分47秒),机
器人将出错。
18
中断指令主要有:IDelete、CONNECT、ISignalDI、Iwatch、 ISleep四种基本指令。由于该指令不可以独立使用
VARintnum intno1;
定义中断数据intno1。
3、常量CONST 常量CONST的特点是在定义时已赋予了数值,且不能在程序中进行 修改,除了手动修改。
03
1、MoveJ:关节运动,机器人用最快捷的方式运动至目标点。此 时机器人运动状态不完全可控,但运动路径保持唯一。常用于机器人 在空间大范围移动。
MoveJ P2,v100,fine,tool1\wobj:=wobj0;
MoveAbsJ *,v100, fine,tool0\wobj:=wobj0;
在编辑状态下,单击【*】,单击【调试】→【查看值】,将 rax_1至rax_6值输入0,单击【确定】,运行该指令,则机器人回到机 械零点位置。
07
08
将对应值修改为0
09
机器人常用的功能函数有工件坐标偏移函数offs()、工具偏移 函数Reltool()和读取机器人当前位置数据函数CRobT()等。
13
Set do1; 将一个do1的信号赋予值为1; Reset do1; 将一个do1的信号赋予值为0; PulseDO\PLength:=2,DO1; 输出2秒时间脉冲信号(DO1)。
(源自:哈工海渡机器人学院)
14
IF:条件指令 满足不同条件,执行对应程序
IF reg> 5 THEN Set ቤተ መጻሕፍቲ ባይዱo1;
1、工件坐标偏移函数offs() 功能函数offs()坐标方向与机器人工件坐标系方向一致。
程序:
MoveL offs(P1,100,50,0),v100,z100,tool1;
注释:
P1为开始位置; 100表示从开始位置沿X轴方向偏移100mm; 50表示从开始位置沿Y轴方向偏移50mm; 0表示从开始位置沿Z轴方向偏移0mm。
IDelete intno1;
取消当前中断符intno1的连接,预防误触发。
CONNECT intno1 WITH tTrap; 将中断符与中断程序(tTrap)连接。
ISignalDI di1,1, intno1; 当输入信号di1为1时,触发该中断程序。 IWatch intno1; 激活中断监控。系统启动后默认为激活状态,只要中断
工业机器人入门实用教程 (ABB机器人)
主讲人:
第七章
• 第01章 ABB机器人认知 • 第02章 机器人手动操纵 • 第03章 机器人零点校准 • 第04章 机器人坐标系建立 • 第05章 机器人示教 • 第06章 机器人输入输出 • 第07章 机器人基本指令 • 第08章 编程实例 • 第09章 异常事件 • 第10章 RobotStudio离线仿真
条件满足,即会触发中断。 ISleep intno1; 使中断监控失效,在失效期间,该中断程序不会被触发。
19
ProcCall:
调用一个例行程序指令;
Return: Exit: WaitTime:
在不适用参数变量时,机器人运行至此指令时,无 论是主程序main、标准例行程序PROC、中断程序 TRAP都代表当前例行程序结束; 停止程序执行并禁止在运行处开始;
TEST count CASE 1: Reg1 := Reg1+ 1; CASE 2: Reg1 := Reg1+ 2; DEFAULT: Reg1 := Reg1+ 3;
ENDTEST 根据count值执行相应case,没有对应值则执行default。
17
计时指令主要有:ClkReset、ClkStart、ClkStop三种指令。由于 这些指令不可以独立使用。
等待时间,单位s;
WaitRob\InPos: 等待机器人执行到当前令。
THANK YOU
MoveL P1,v200,z10,tool1\wobj:=wobj0; MoveL P2,v100,fine,tool1\wobj:=wobj0; MoveJ P3,v500,fine,tool1\wobj:=wobj0;
05
3、MoveC:圆周运动,机器人通过中间点以圆弧移动方式运动至 目标点。当前点、中间点与目标点三点决定一段圆弧,机器人运动状 态可控制,运动路径保持唯一。常用于机器人在工作状态下移动。
如果条件满足,则重复执行对应程序 WHILE Reg1 <reg2 Do Reg1 := Reg1+ 1; ENDWHILE
如果变量Reg1<reg2条件成立,则一直重复执行,Reg1加1,直到 条件不满足为止。
16
TEST:当前指令通过判断相应数据变量与其对应的值,控制需要执 行的相应指令。
第7章 机器人基本指令
教学内容:
7.1 常用数据类型 7.2 编程基础知识
学习目标:
1、了解ABB机器人常用数据类型 2、掌握ABB机器人基本运行指令 3、掌握ABB机器人掌握功能函数使用 4、掌握ABB机器人输入输出指令 5、掌握ABB机器人流程指令 6、掌握ABB机器人计时指令 7、掌握ABB机器人中断指令 8、掌握ABB机器人其他指令
ClkReset clock1; 计时器清零
ClkStart clock1; 计时器开始计时
RunCycle;
程序名
ClkStop clock1; 计时器停止计时
CycleTime:= ClkRead(clock1)
读取计时器内容
TPWrite“RunCycle Time :”\Num:= CycleTime;
MoveL 起点,v200,z10,tool1\wobj:=wobj0; MoveC 圆弧上点,终点,v500,fine,tool1\wobj:=wobj0;
06
MoveAbsJ:机器人以单轴运行的方式运动至目标点。此运动方式 绝对不存在奇点,且运动状态完全不可控制。要避免在正常生产中使 用此命令。指令中TCP与Wobj只与运动速度有关,与运动位置无关。 常用于检查机器人零点位置。