惠鱼实验报告
鱼类营养生理实验
鱼类蛋白质利用率的测定
(三)克氏定氮法 采用克氏(Kjeldahl)定氮法测定样品含氮量。其方法如下: 1.原理 2H2SO4 C+O2 CO2 2SO2+2H2O+O2 2H2+O2 2H2O
NH2-CH2-COOH+3H2SO4 2NH3+H2SO4 2H2SO4+Se2 (NH4)2SO4+H2SeO3 3(NH4)2SeO3 (NH4)2SO4+2NaOH NH3+H2BO3
(5)计算。 样品含氮量(%)=(样品滴定值-空白滴定值)×c×n 1 000×VD V×100 m 样品粗蛋白含量(%)=样品含氮量×625 式中,c为标准酸液的物质的量浓度(mol/L); n为氮原子的摩尔质量(14); VD为样品消化后定容体积(mL); V为用于测定的消化液体积(mL); m为样品质量(g)。
(二)14C标记粗纤维的提取 称取20 g 14C标记的凤眼莲干粉置于3 000 mL大烧杯中,加入2 000 mL 125 mL/L H2SO4,加热煮沸,同时加入数滴辛醇溶液,以防止气泡过多,并 注意水分蒸发。不断用滴管加入沸水,使烧杯内溶液保持在2 000 mL左右。持续沸 腾30 min后趁热倒入布氏漏斗中抽滤。抽滤毕,用沸水洗2~3次,每次用水约40 0~800 mL。洗至滤渣不呈酸性为止。再用2 000 mL 125 g/L NaOH 溶液把漏斗内的滤渣洗回原大烧杯中,并依法进行碱处理。碱处理后,滤渣用沸水洗至不 呈碱性;用煮沸的125 mL/L H2SO4 400 mL分为2~3次洗滤渣,以除 去溶于酸中的某些金属沉淀,接着用沸水分数次洗去残余硫酸直至不呈酸性为止。最后, 用100 mL 950 mL/L乙醇洗滤渣,再用200 mL乙醚分两次滤洗,所得的滤 渣就是粗纤维,将它置于105 ℃烘箱中烘干备用。 提取的粗纤维的抽样用常规生化分析方法试验,证实与粗纤维共存于凤眼莲植物体中的蛋 白质、脂肪、糖类等物质均已清除。
鱼类蛋白提纯实验报告(3篇)

第1篇实验名称:鱼类蛋白提纯实验实验目的:1. 熟悉鱼类蛋白提取的基本原理和方法。
2. 掌握鱼类蛋白粗提、纯化和鉴定等实验技术。
3. 了解蛋白质在不同溶剂中的溶解性差异,以及盐析、透析等纯化方法的原理和应用。
实验原理:蛋白质是生物体内重要的生物大分子,具有多种生物学功能。
鱼类蛋白提取是研究蛋白质结构和功能的重要步骤。
本实验通过使用不同的提取方法和纯化技术,从鱼类组织中提取蛋白质,并对提取的蛋白质进行鉴定。
实验材料:1. 鱼肉样本2. 丙酮、甲醇、盐酸、硫酸铵、SDS、考马斯亮蓝G-250等试剂3. 离心机、紫外分光光度计、透析袋、凝胶电泳装置等仪器实验步骤:一、样品处理1. 将鱼肉样本切碎,用丙酮或甲醇进行初步提取,去除脂肪和杂质。
2. 将提取液离心,取上清液作为粗提蛋白溶液。
二、粗提蛋白的纯化1. 盐析法:将粗提蛋白溶液用硫酸铵进行盐析,调节pH值至7.0,离心分离蛋白沉淀。
2. 透析法:将蛋白沉淀用透析袋进行透析,去除小分子杂质。
三、蛋白鉴定1. 紫外分光光度法:测定蛋白溶液的紫外吸收光谱,确定蛋白质的浓度。
2. 凝胶电泳法:将蛋白溶液进行SDS-PAGE电泳,分析蛋白质的纯度和分子量。
3. 考马斯亮蓝G-250染色法:观察电泳后的蛋白质条带,判断蛋白质的纯度。
实验结果:一、粗提蛋白的盐析通过硫酸铵盐析,得到白色蛋白沉淀,表明蛋白质成功从鱼肉组织中提取。
二、粗提蛋白的透析通过透析,去除小分子杂质,得到较纯的蛋白溶液。
三、蛋白鉴定1. 紫外分光光度法:蛋白溶液在280nm处有较强的吸收峰,表明存在蛋白质。
2. 凝胶电泳法:电泳结果显示,蛋白溶液在特定位置出现单一条带,表明蛋白质纯度较高。
3. 考马斯亮蓝G-250染色法:电泳后的蛋白质条带颜色均匀,表明蛋白质纯度较高。
实验结论:本实验成功从鱼肉组织中提取了蛋白质,并通过盐析、透析等纯化方法得到了较纯的蛋白溶液。
实验结果表明,紫外分光光度法、凝胶电泳法和考马斯亮蓝G-250染色法均可用于蛋白质的鉴定。
慧鱼模型实验报告
慧鱼模型实验报告
实验目的:
本次实验旨在使用慧鱼模型对鱼类群体的生存率进行预测,并验证模型的准确性和可靠性。
实验材料和方法:
1.实验材料:
本实验使用的材料包括:鱼群体,慧鱼模型软件,电脑,实验环境。
2.实验方法:
首先,对鱼群体进行统计和标记,以便于后续的数据收集和处理。
然后,在实验环境中放置饵料,等待鱼群体进食。
观察一段时间后,记录下鱼群体的数量和生存情况,并将数据输入到慧鱼模型软件中进行分析和预测。
实验结果:
通过实验数据的统计和分析,我们得到了以下结论:
1.慧鱼模型能够较为准确地预测鱼类群体的生存率。
2.影响鱼类生存率的因素包括,但不限于,饵料类型,鱼类种类,饵料摆放方式等。
3.鱼群体的数量和种类对生存率有着显著的影响,其中数量较多的鱼群体生存率较低,品种较杂的鱼群体生存率也较低。
实验结论:
通过本次实验,我们验证了慧鱼模型在预测鱼类群体生存率方面的准确性和可靠性。
同时,也进一步了解了鱼类群体生存率的影响因素,并为后续的鱼类群体管理提供了科学依据。
慧鱼实验报告
慧鱼实验报告慧鱼实验报告介绍慧鱼是一种水生动物,属于鲤科,主要分布于亚洲和欧洲的淡水湖泊和河流中。
慧鱼是一种重要的经济鱼类,在中国、日本、韩国等地广泛养殖。
本次实验旨在研究慧鱼的生长发育规律及其适宜的生存环境。
材料与方法材料:10条体长相近的慧鱼,10个大小相同的水族箱,适量的水草和人工饲料。
方法:将10条体长相近的慧鱼放置在10个大小相同的水族箱中,每个箱子放置一条慧鱼。
在每个箱子中添加适量的水草和人工饲料,并保持恒定温度和光照条件。
每天记录每条慧鱼的体重和长度,并观察其生长发育情况。
结果与分析经过30天的观察和记录,我们得出了以下结果:1. 慧鱼体重增长速度较快,平均每天增长0.5g左右;2. 慧鱼长度增长速度较慢,平均每天增长0.2cm左右;3. 慧鱼在适宜的水温和光照条件下生长发育良好,不适宜的环境会影响其生长发育。
根据以上结果,我们可以得出以下结论:1. 慧鱼体重增长速度较快,说明慧鱼是一种快速生长的鱼类,适合进行养殖;2. 慧鱼长度增长速度较慢,说明慧鱼在生长过程中需要更多的时间和空间;3. 适宜的水温和光照条件对慧鱼的生长发育至关重要。
结论与建议根据实验结果,我们建议在进行慧鱼养殖时应注意以下几点:1. 提供适宜的水温和光照条件,以保证慧鱼的正常生长发育;2. 在养殖过程中要注意控制慧鱼的密度,避免过度密集造成竞争和压力;3. 给予足够的空间和营养物质,以保证慧鱼能够正常生长发育。
总结本次实验通过观察和记录慧鱼的生长发育情况,得出了一些有价值的结论和建议。
我们相信这些结果和建议对于慧鱼的养殖和保护具有一定的参考价值。
鱼类生物实验报告总结
鱼类生物实验报告总结写作背景最近我们进行了一系列关于鱼类生物的实验研究,目的是深入了解鱼类的生理特征和行为习性,为鱼类保护和养殖提供科学依据。
通过实验观察和数据分析,我们得出了一些有意义的结论。
以下是对这些实验的总结报告。
实验一:鱼类呼吸方式的观察通过对不同种类鱼类的呼吸方式进行观察,我们发现鱼类有三种主要的呼吸方式:鳃呼吸、肺呼吸和皮肤呼吸。
我们对四种常见鱼类进行了实验观察,其中金鱼和鲤鱼采用鳃呼吸,蝌蚪和鳗鱼则采用皮肤呼吸。
这个发现对于我们正确了解鱼类的呼吸机制具有重要意义。
实验二:鱼类行为习性的研究我们通过观察不同种类鱼类的行为习性,揭示了它们的繁殖、食性和社交行为。
通过实验观察,我们发现斑马鱼具有强烈的领地意识,它们保卫自己的领地不畏惧同类攻击。
而鳗鱼则是一种寄生性鱼类,它们寄生在其他鱼类身上,获取食物和营养。
这些行为习性的研究为我们理解鱼类的生态行为提供了重要线索。
实验三:鱼类生长速度的测定我们对不同品种鱼类的生长速度进行了测量,以便了解其生长规律和最佳养殖环境。
通过观察和测量,我们发现金鱼的生长速度较快,可以适应各种水质环境,适合养殖。
而鲤鱼的生长速度较慢,对水质要求较高,这对于鲤鱼养殖有重要的指导意义。
实验四:饲料对鱼类生长的影响我们研究了不同类型饲料对鱼类生长的影响,并对其嗜食性和营养需求进行了分析。
通过实验,我们发现对于金鱼来说,植物性饲料更加适合它们的生长发育;而肉食鱼类,如鳗鱼,则需要更多的蛋白质类食物来保持其生长和健康。
结论与展望通过一系列的鱼类生物实验研究,我们对鱼类的生理特征、行为习性、生长速度和饲养需求等方面有了更深入的了解。
这些研究结果为鱼类的保护、养殖和生态学研究提供了重要的科学依据。
然而,目前我们的研究还有一些不足之处,比如样本数量较小,实验条件不完全符合自然环境等。
未来我们将进一步扩大样本数量,提高实验条件,以便更全面地了解鱼类的生物学特征和生态行为,为鱼类生物学的进一步研究和应用提供更加可靠的数据支持。
免疫学综合实验_2014

鱼类免疫学综合实验一、实验目的通过测定人的ABO血型,鱼的血清沉降抗体效价、白细胞的分离与鉴定、溶菌酶活性等实验的基本实践操作,加深对课堂知识的理解和体会,进一步掌握鱼类免疫学的基本理论,熟悉常规免疫学实验基本操作。
二、实验材料(1)实验材料:鲫(2)实验工具:微量移液器、稀释棒(25μl)、载玻片、培养皿、离心管、注射器(2ml、5ml)、手术剪、酒精灯、显微镜、打孔器、大头针、恒温箱、冰箱、生理盐水、金黄色葡萄球菌、甲醇、吉姆萨染液、肝素钠、琼脂等。
三、实验准备1、取两支离心管,一支加入少量肝素,使肝素钠浸润管壁,另一支不加。
2、在鲫两鳃之间剪断腹主动脉,头腹部向下,使血液滴入上述两试管,混匀,置于离心管板静置1小时备用。
四、实验项目(一)ABO血型鉴定(玻片法)原理:血型就是红细胞膜上特异抗原的类型。
在ABO血型系统中,红细胞膜上抗原分A和B两种抗原,而血清抗体分抗A和抗B两种抗体。
A抗原加抗A抗体或B抗原加抗B抗体,则产生凝集现象。
血型鉴定是将受试者的红细胞加入标准A型血清(含有抗B抗体)与标准B型血清(含有抗A抗体)中,观察有无凝集现象,从而测知受试者红细胞膜上有无A或/和B抗原。
在ABO血型系统,根据红细胞膜上是否含A、B抗原而分为A、B、AB、O四型。
1.取双凹玻片一块,用干净纱布轻拭使之洁净,在玻片两端用腊笔标明A及B,并分别各滴入A及B标准血清一滴。
2.细胞悬液制备从指尖或耳垂取血一滴,加入含1ml生理盐水的小试管内,混匀,即得约5%红细胞悬液。
采血时应注意先用75%酒精消毒指尖或耳垂。
3.用滴管吸取红细胞悬液,分别各滴一滴于玻片两端的血清上,注意勿使滴管与血清相接触。
4.竹签两头分别混合,搅匀。
5.10~30min后观察结果。
如有凝集反应可见到呈红色点状或小片状凝集块浮起。
先用肉眼看有无凝集现象,肉眼不易分辨时,则在低倍显微镜下观察,如有凝集反应,可见红细胞聚集成团。
6.判断血型根据被试者红细胞是否被A,B型标准血清所凝集,判断其血型。
初中生物实验报告(小鱼尾鳍)
初中生物实验报告(小鱼尾鳍)
C1109第16组生物实验报告
——小鱼尾鳍内血液的流动一( 目的要求
1. 观察血液在血管内的流动。
2. 尝试分辨血管的种类以及血液在不同血管内的流动情况。
二(材料用具
活的泥鳅,显微镜,培养皿,滴管,纱布,清水。
三(方法步骤
1 用浸湿的纱布将小鱼包裹起来,只露出尾鳍(或尾鳍和口)
2 将包好的小鱼平放在培养皿中,使尾鳍平贴在培养皿上
3 将培养皿放在载物台上用低倍显微镜观察尾鳍血管内血
液的流动情况
4 找到管径最小的血管,注意观察血液在这种血管中的流
动情况
5 注意观察管径最小的血管是由什么血管分支而来的,它
最终由汇入什么血管中
注小鱼在培养皿中会跳动,这时不要叫,把浸湿的纱布覆意盖在除尾鳍外的部分,并在观察时在鳃盖处滴加清水保持
湿润,以维持小鱼的呼吸作用。
做完实验后,将小鱼放
回水中,还可供其他人使用。
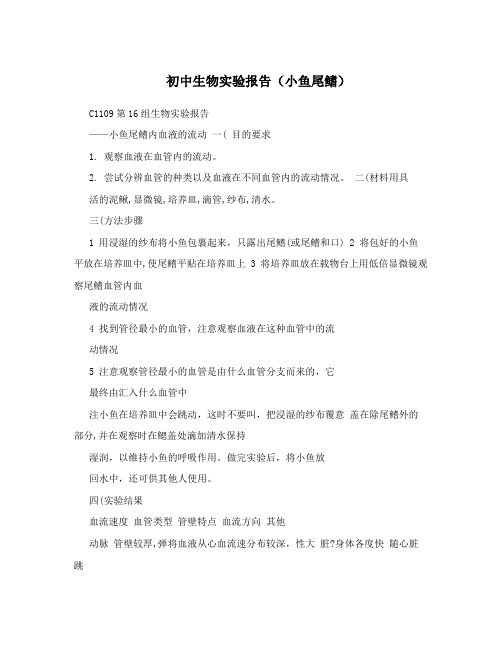
四(实验结果
血流速度血管类型管壁特点血流方向其他
动脉管壁较厚,弹将血液从心血流速分布较深,性大脏?身体各度快随心脏跳
部分的血管动而搏动
(主干?分
支)
毛细血管管壁非常由动脉?静血流速分布最广薄,只由一脉度最慢泛,数量最层扁平上皮多,管腔内细胞构成径非常狭
小,只许红
细胞单行
通过
静脉管壁薄,弹将血液从身血流速分布较浅,性小体各部分?度慢一般不能心脏搏动,通常
具有防止
血液倒流
的静脉瓣
学生评价好老师评价。
鱼的各种实验报告

鱼的各种实验报告引言本报告旨在介绍鱼类的各种实验研究,包括鱼类行为实验、鱼类生态实验以及鱼类生理实验等。
通过这些实验,我们可以更深入地了解鱼类的行为、适应能力以及生理机制,为保护和利用鱼类资源提供科学依据。
一、鱼类行为实验1. 觅食行为观察实验在实验室条件下,观察不同种类鱼类的觅食行为。
例如,将鱼类放置于水池中,同时向水池中放入不同种类饵料,记录各种鱼类对不同饵料的选择和觅食策略。
通过这个实验可以了解鱼类的觅食习性和食性分类。
2. 群体行为观察实验观察鱼类在不同群体组织中的行为表现。
例如,将鱼类放置于不同大小的水池中,记录各种鱼类的集群活动,包括聚拢、分散、领导者行为等。
通过这个实验可以了解鱼类的社会行为和领导层次。
3. 学习与记忆实验通过经典条件作用和操作条件作用实验,研究不同种类鱼类的学习和记忆能力。
例如,将鱼类与特定刺激(如光线或声音)相连,观察它们对该刺激的反应。
后续的实验可以用来测试鱼类对该刺激的记忆时间和程度。
二、鱼类生态实验1. 水质适应实验研究不同种类鱼类对不同水质环境的适应能力。
例如,将鱼类分别放置在不同氧含量、酸碱度、温度等条件下,观察它们的呼吸、饮食和活动变化。
通过这个实验可以了解鱼类对不同水质环境的适应能力和生存能力。
2. 迁移与季节行为实验研究鱼类的迁移和季节行为,以揭示它们的迁徙路线、迁徙动力和迁徙方式。
例如,通过标记回收法来追踪鱼类的迁移路线,或者通过监测鱼类的光感受器和地磁感受器来了解其导航行为机制。
3. 摄食选择实验研究鱼类在不同食物资源环境下的选择行为。
例如,将鱼类置于不同种类食物的选择场景中,观察其对不同食物的摄食偏好。
通过这个实验可以了解鱼类的食物选择机制和资源利用策略。
三、鱼类生理实验1. 呼吸实验通过测量鱼类的呼吸频率和耗氧量,研究不同环境条件下鱼类的呼吸适应能力。
例如,将鱼类放置于氧浓度不同的水域中,测量其呼吸频率和氧耗量的变化。
通过这个实验可以了解鱼类对氧浓度变化的适应机制。
鱼的实验报告

鱼的实验报告鱼的实验报告引言:鱼类作为水生生物的代表,具有广泛的分布和多样的物种。
它们在生态系统中起着重要的作用,对于生物多样性的维持和食物链的构建具有重要意义。
本实验旨在探究鱼类的生态适应能力和行为特征,以及环境因素对其生存和繁衍的影响。
一、鱼类的生态适应能力鱼类在水生环境中具有独特的生态适应能力。
首先,它们的体形和鳞片结构使其能够在水中自由游动,并减少摩擦阻力。
其次,鱼类的鳃器官使其能够从水中吸取氧气,以维持呼吸和新陈代谢。
此外,鱼类还具有适应不同水温的能力,一些鱼类可以在寒冷的深海中生活,而另一些鱼类则适应于温暖的河流和湖泊。
二、鱼类的行为特征鱼类的行为特征受到多种因素的影响,包括遗传、环境和社会因素。
在实验中,我们观察到鱼类的觅食行为和群体行为。
觅食行为是鱼类生存和繁衍的基本需求之一,不同种类的鱼类有不同的觅食方式和偏好。
例如,底栖鱼类倾向于在水底寻找食物,而游泳鱼类则更喜欢在水中追逐捕食。
群体行为是鱼类社会性的体现,它们常常以群体的形式活动,以提高生存的成功率。
在实验中,我们观察到鱼类在面对外部威胁时会采取集体逃避或集体攻击的策略,以保护自己和群体的安全。
三、环境因素对鱼类的影响环境因素对鱼类的生存和繁衍有着重要的影响。
在实验中,我们模拟了不同的环境条件,包括水温、水质和食物供应等。
我们发现,水温的变化对鱼类的生理功能和行为产生了显著影响。
在较低的水温下,鱼类的新陈代谢减缓,活动能力下降;而在较高的水温下,鱼类的新陈代谢加快,但也容易受到热应激的影响。
水质的好坏也对鱼类的生存和繁衍起着重要作用,水中的有害物质和富营养化会影响鱼类的健康和生殖能力。
此外,食物供应的充足与否也直接关系到鱼类的生长和发育。
我们的实验结果表明,环境因素的变化对鱼类的生存和繁衍产生着直接的影响。
结论:通过本次实验,我们对鱼类的生态适应能力和行为特征有了更深入的了解。
鱼类作为水生生物的代表,其独特的生态适应能力使其能够在各种水生环境中生存和繁衍。
鱼类生理学实验

4 分析与探讨 4.1 Hb测定结果比对照高(或低、或基本一致),从操作过程 方面说明原因:……。 4.2 RBC脆性测定结果,与对照组相比,最小抵抗高(或低、 或基本一致),最大抵抗……,从操作过程方面说明 原因:……。 4.3 凝血时间测定结果表明,××处理能加快(抑制或不 凝)血液凝固,为什么?××管加CaCl2后凝固,为什么? (从凝血机制分析) 5 参考文献 [1] 杨秀平. 动物生理学实验[M]. 北京:高等教育出版社,2004,85-99.
RBC脆性测定(NaCl%)
最小抵抗
最大抵抗
实验组
对照组
75
0.48~0.40
0.33~0.21
3.2 不同因素对血液凝固时间的影响 表2 血液凝固及其影响因素
试管号
实验处理
凝血时间(秒)
1
空白
2
液体石蜡4滴
3
棉花少许
4
冰水环境
5
肝素4滴
6
草酸钾4滴
7
肺组织浸液4滴
5号管加CaCl24滴
6号管加CaCl24滴
家兔Hb、RBC脆性测定及影响血凝的因素观察
1 实验相关信息及目的 2 材料 2.1 动物 2.2 主要药品: 2.3 主要仪器: 3 实验方法:简述或按生理实验指导书a~b页介绍方法进行[1]。 4 结果 4.1 家兔Hb、RBC脆性测定:见表1。
实验四 蛙心收缩的记录和心肌特性证明 【实验目的】 学习蟾蜍心脏活动描记的方法,观察心肌收缩的特点。 【实验原理】 心肌的有效不应期特别长,几乎占据了整个收缩 期和舒张早期。在此期内任何刺激均不能引起心肌收 缩。因此心肌不会产生强直收缩,心脏总是有节律的 舒缩。在心脏舒张早期之后,给心肌一次有效刺激, 会引起心脏一次期前收缩,紧接着出现一次较长的间 歇——代偿间歇。
鱼类学实验报告

鱼类学实验报告一. 实验目的本实验的目的是为了了解鱼类学方面的一些基本原理,同时透过实验加深对鱼类的认识并提高实验技能。
二. 实验材料和仪器1. 鱼类样本2. 显微镜3. 活体鱼类实验器材4. 安全手套和实验服5. 显微镜玻片和盖玻片三. 实验步骤1. 准备工作将鱼样本按标准操作进行解剖,取出它们的鱼鳃和鱼鳞,并将其观察到细胞结构及其对周围环境的适应性2. 成像将鱼的鱼鳃和鱼鳞分别进行镜下成像,用显微镜进行观察,通过对样本的成像来了解细胞结构和生理特征3. 实验记录进行实验过程中每一个步骤的记录,包括观察习性的变化,发现的问题以及所得到的结果四. 实验结果与分析1. 实验结果本次实验得到了鱼类生物学方面的一些基础性的数据,以及对鱼鳃和鱼鳞的构造及其对周围环境的适应性有了更加深刻的了解。
2. 结论及探讨通过实验,我们可以发现,鱼类的鱼鳃和鱼鳞是它们与生俱来的重要器官,对鱼类生存至关重要。
它们不仅可以帮助鱼类吸收氧气,还可以防止身体遭受外界的伤害。
五. 实验注意1. 实验过程中有害物质会影响实验结果,必须穿戴实验服和安全手套2. 实验现场必须保持干净卫生,避免污染仪器3. 在进行鱼类活体实验的时候一定要注意不要造成其伤害,结束实验后应尽快放回水中以减少其压力4. 拆解鱼类样本时一定要办好防护措施,不要影响工作人员的健康六. 实验总结通过本次实验,我们充分了解了鱼类的鱼鳞和鱼鳃构造,对鱼类生物学有了更加深刻的认识,同时提高了我们的实验操作技巧。
此外,我们也要不断更新自己的知识储备,努力学习研究,更好地服务于我们的实验工作。
鱼类学实验报告

鱼类学实验报告1. 引言鱼类学实验是生物学和生态学领域中非常重要的一部分,通过对鱼类的研究可以了解它们的行为、生理特性和环境适应能力等方面的信息。
本实验旨在通过观察和记录鱼类的行为和生理指标,探究它们在不同环境条件下的行为变化和生理响应。
2. 实验设计2.1 实验材料•鱼缸:用于容纳鱼类的透明玻璃容器。
•水质检测工具:用于检测鱼缸中的水质参数,如PH值、溶解氧含量等。
•饲料:用于喂养实验中的鱼类。
•实验记录表:用于记录实验过程中的观察和实验数据。
2.2 实验步骤1.准备工作:清洗鱼缸并填充适量的水。
检测并调整水质指标至合适的范围。
2.实验组设置:将一定数量的鱼放入鱼缸中,根据实验需要设置不同的环境条件,如温度、光照强度等。
3.观察记录:观察和记录鱼类的行为,包括游动方式、觅食行为、群体行为等。
4.生理指标检测:定期检测鱼缸中的水质参数,并观察鱼类的生理指标,如呼吸频率、心率等。
5.数据分析:对实验数据进行整理和分析,比较不同条件下鱼类的行为和生理响应差异。
6.结论和讨论:根据实验结果讨论鱼类在不同环境条件下的适应能力和生物学特性。
3. 实验结果与讨论通过本次实验观察和记录的鱼类行为和生理指标,我们发现了一些有趣的现象和规律。
在不同温度和光照条件下,鱼类的活动范围和觅食行为有所变化。
在较低温度下,鱼类的游动活动减少,觅食行为也相应减弱;而在较高温度下,鱼类活动范围扩大,觅食行为变得更活跃。
这表明鱼类对温度变化有一定的生理适应能力。
此外,在不同光照强度下,鱼类的行为也有所变化。
在较弱的光照条件下,鱼类活动范围有所减小,觅食行为减弱;而在较强的光照条件下,鱼类活动范围扩大,觅食行为变得更加活跃。
这表明光照强度对鱼类的行为具有一定的调节作用。
通过对水质参数和鱼类生理指标的监测,我们发现水质的变化对鱼类的生理状态产生了显著影响。
当水质变差时,鱼类的呼吸频率增加,表明它们对氧气的需求增加;而在水质较好的情况下,鱼类的呼吸频率相对较低。
鱼类学实验报告一

实验一鱼类的外部形态一、实验目的:1、了解鱼类体形的多样性及体形与生活环境、生活习性间的相互关系。
2、通过对不同鱼类鳍条和鳞片的观察与计数,掌握鳍式与鳞式的正确表达方式。
掌握鱼体可量性状的正确测量方法,体会可比性状的形态学意义。
3、初步熟悉鱼体外部特征与术语。
二、实验内容:1、体型与体色;2、各鳍的形态特征;3、侧线完全情况下与侧线不完全情况下鳞片的数计4、棘、假棘、不分支软条与分支软条的观察与数计;5、鱼体外部可量性状及可比性状三、仪器与材料:显微镜、测量与绘图用具,1套/组。
四、实验步骤:1、熟悉各种鱼的名称并仔细观察其外部特征;2、识别各种鱼的各种鳍及掌握鳍式的表达方式3、测量各种鱼的可量性状五、作业(一)填空题1、鱼类骨骼可分为外骨骼< 鳞片 + 鳍条 >和内骨骼< 头骨 + 脊柱 >两大部分。
2、骨骼之功能为支撑身体、保持体形和保护鱼体内部器官。
3、背鳍、臀鳍的支鳍骨一般由基节、中节和末节构成,高等鱼则逐渐减少。
4、支持胸鳍的带骨为肩带,支持腹鳍的带骨为腰带。
5、鳍条分为“角质鳍条“和鳞质鳍条”,前者是软骨鱼类特有,后者是硬骨鱼类特有,它根据分支、分节情况可以分为末端分支、末端不分支、末端不分支鳍条。
6、鱼类的皮肤由表皮和真皮组成,前者起源于上皮细胞,后者起源于结缔组织。
7、鳞片根据它的形状、构造和发生,分为盾鳞、硬鳞和骨鳞,骨鳞由真皮产生,根据露出体外部分有无棘刺可分为园鳞、栉鳞。
8、鲤和鲫最主要的区别特征是是否具有两对口须。
9、青鱼和草鱼最主要的区别特征是生活环境,形态特征。
10、鲈鱼和鳜鱼最主要的区别特征是腹部腹鳍前后腹棱。
11、鱼类的体腔分为___颅腔___与____腹(胸)腔_____两部分。
12、在生殖季节,许多硬骨鱼雄体常在鳃盖上,上唇触须上、胸鳍等部位出现一些点状或小片状突起,叫做_珠星,它们是由表皮__角质化___形成。
13、鲢鱼(或白鲢)的腹棱自_胸鳍基部_至___肛门__,鳙鱼(或花鲢或胖头鱼)的腹棱是自__腹鳍____至___肛门__。
改良品系鲤鱼鱼种养至商品鱼试验总结
黑龙江水产2013年第1期35改良品系鲤鱼鱼种养至商品鱼试验总结杨秀张志华(黑龙江省水产技术推广总站黑龙江哈尔滨150018)2012年,黑龙江省水产技术推广总站与美国大豆协会合作开展了改良品系鲤鱼鱼种养至商品鱼试验。
本试验的目的是利用美国大豆协会-国际项目80:20池塘养殖模式和豆粕型膨化浮性饲料对改良品系鲤鱼鱼种养至成鱼的生长性能和经济效益进行示范试验。
1材料与方法1.1池塘条件本试验使用黑龙江省水产技术推广总站试验示范基地的三口池塘,每口池塘面积为5亩。
试验池的平均水深为1.5m ,试验池配备水泵和叶轮式增氧机(功率3kW ),水源来自地下井水。
水源水质无污染,符合《渔业水质标准》。
试验期间三口试验池均不换水,只补注新水,以补充自然蒸发和渗漏造成的水体损失。
在试验结束后,三口试验池中的水体仍保留在原池中以供继续养鱼之用。
1.2鱼苗放养试验鱼种均为本试验示范基地2011年养殖的改良品系鲤鱼鱼种。
2012年4月27日放养鱼种,鱼种规格为420g /尾,放养密度为240尾/667m 2;搭配放养规格为125g /尾的白鲢鱼种,放养密度为100尾/667m 2。
放养鱼种规格整齐。
1.3饲料投喂试验饲料均由美国大豆协会提供配方,宁波天邦股份有限公司生产。
饲养期投喂32/6豆粕形膨化浮性饲料(SPC )。
5月21日开始投喂,日投饲量采用ASA —IM90%饱食法,每天投饲3次。
三口池塘的日投饲量完全相同。
1.4日常管理试验日常管理按照美国大豆协会80:20池塘养鱼技术指南执行。
每月对试验鱼进行打样称重。
在试验结束时,分别计算出每口试验池中改良品系鲤鱼和鲢鱼的平均体重、毛产量、净产量、饲料系数和成活率。
在试验过程中详细记录生产成本,以便在试验结束后计算出净收入和投资回报率。
2结果改良品系鲤鱼饲料投喂是从5月21日开始到9月18日结束,共投饲121d 。
改良品系鲤鱼个体从420g 长至1860.3g 。
改良品系鲤鱼和鲢鱼的平均毛产量分别为440kg /667m 2和61kg /667m 2,成活率分别为98.61%和92.0%。
鱼类学实验报告五

实验五不同家鱼部分生物学形状观察一、目的要求通过本实验,掌握鱼类鳞片上的年轮标志,认识性腺成熟分期的特征,了解食性的研究方法。
二、实验材料和工具(一)工具解剖盘,解剖刀,解剖剪,尖头摄,药用天平,秤,直尺,分规,解剖镜,显微镜,载玻片,透明胶纸,目微尺,培养皿,吸管,4%福尔马林溶液。
(二)材料2龄以上,已达性成熟的新鲜鱼;已做好的鲢(或鳙)鳞片片子;年轮示范——鲢鳍条切片,镢(或鲈)鳃盖骨,鲇脊椎骨,沙塘鳢胸鳍辐鳍骨,大黄鱼(或小黄鱼)的耳。
三、内容和方法(一)测定鲤的体长、体重。
然后在鲤的背鳍下方、侧线上方的左右体侧取6—10枚鳞片(不取再生鳞和侧线鳞)浸入淡氨水或温水中数分钟,用牙刷或软布轻轻擦去表皮及粘液,再放到清水冲洗,拭干后夹在两载玻片之间,用透明胶纸固定后即可用作观察年轮。
用剪刀在鲤肛门前方剪一小口后沿腹中线向前开腹壁肌肉,注意不要损坏内脏,剪至鳃盖下方为止,然后剪去左侧腹壁肌肉,观察性腺成熟度和肠的充塞度。
(二)性腺成熟度鉴别1. 根据性腺大小、·颜色、血管分布状况、卵细胞牲状等标准,目测性腺成熟度的分期等级。
I期:性腺呈透明细线状,紧败矛鳔下诱侧的体腔膜上,肉踉无法区别雌雄。
Ⅱ期:卵巢为扁带状,淡红色,表面有分枝状的细长血管,卵相互紧依,肉跟看不清卵粒,用放放大镜可见卵粒,精巢呈线状或细带状,半透明或不透明,血管不显著。
Ⅲ期:卵巢椭圆形,黄橙色,前部宽大,表表有血管分布,肉跟可见卵粒;邻粒开始沉积卵黄,精巢圆杆状,粉红色,压挤精巢或剪开精巢无精液流出。
Ⅳ期:卵巢增大,橘黄色,占据大部腹腔,卵巢膜具弹性,血管发达,卵粒大而饱满,充满卵黄。
到Ⅳ期末,肉眼可见卵核。
精巢呈乳白色,早期阶段无精液流出;晚期能挤出少量白色精液。
V期:卵粒流动;提起鱼钵;卵屈生殖孔滞出。
提起雄鱼或轻压腹部,糟液从生殖孔涌出。
Ⅵ期:当年生殖过的性腺,卵巢体积大大缩小,松软,表面充血,外观呈紫红色,残留少量卵精巢体积显著缩小,呈淡红色。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
惠鱼实验报告
篇一:慧鱼实验报告
华北电力大学
实验报告
实验名称: 慧鱼创意系统的实践与开发
课程名称:科技创新实践3
实验人:设制1301班施宗财 XX04410121
输电1402班张志聪 XX04400231
机电1401班侯文涛 XX044XX0
成绩:优秀
指导教师:房静
实验日期:
华北电力大学工程训练中心 | || |
隧道蔽障寻迹机器人
作品设计说明
一.研制背景及意义
我们知道
,隧道、涵洞、高楼等工程建筑物发生事故时会发生坍塌,此时,救援人员是无法直接进入这些建筑物中进行营救工作的。
同时,也没法得知里面的实际状况。
为了解决这个问题,我们此次设计了这个隧道蔽障寻迹机器人,以期解决这个问题,以方便营救,代替人力进入这些复杂地段进行探测工作。
根据设计方案,我们先搭建了慧鱼模型,并进行了调试及简单的实地实验。
二、实验目的
1、认识了解慧鱼创意模型组合包中的各种功硬件。
2、了解ROBOPRO软件及编程。
3、了解慧鱼创意模型是如何控制与协调机构运动的。
4、锻炼机械创新能力,初步建立对机电一体化产品的认识。
三、实验原理
隧道机器人是一种代替人力进入到坍塌建筑物中的机器。
能够进行蔽障、循迹,并且能够携带摄像头、红外探头、热敏、光敏、声敏电阻等的传感器进入复杂地段进行探测的机器。
拥有很大的市场开发前景。
四、实验器材
1、“慧鱼”创意模型组合包。
2、“慧鱼”专用电源、数据线。
3、计算机一台。
4、“慧鱼”专用智能接口板。
5、ROBOPRO软件。
五、实验准备
认识“慧鱼”创意模型使用手册中已搭建的示例模型。
六、实验内容
1、根据慧鱼”创意模型使用手册,使用各种构件逐步搭建示例模型。
2、模型搭建好后连接相应电路。
3、在计算机上应用ROBOPRO软件编写相应程序,并通过数据线将程序下载到接口板中。
4、接通电源,调试程序。
5、验收成果并拆卸构件,放回原处。
七、实物成品图片展示
八、程序流程图
九、简单介绍功能
1、进入坍塌建筑物进行探测(可以加装摄像头以及探测头);
2、寻找并避开障碍物;
3、给定轨迹,能迎着所给轨迹进行运动(走出轨迹以后,灯亮,同时蜂鸣器发声)
十、实物示范(实际效果图)
篇二:慧鱼报告
“慧鱼”机构组合模型创意
设计塔接实验报告
姓名:班级:
学号:
目录
(一)实验名称 (1)
(二)实验目的 (1)
(三)实验步骤 (1)
(四)完成后项目的照片 (2)
(五)塔接完成后结构的障碍分析 (7)
(六)对结构的改进意见 (7)
(七)实验心得体会 (8)
(一) 实验名称
本实验名称:珠子循环滚动轨道系统。
实验介绍:本实验主要是塔接一个由架子支撑轨道的系统。
并由电机带动履带,履带上的磁铁吸附落到轨道末端的钢珠,重新运输到轨道的始端,珠子通过轨道又回到轨道末端;如此循环下去。
(二)实验目的
1.熟悉慧鱼模型的各个模块,了解轨道系统的基本结构。
2.通过实验提高动手能力和创新技能,对创新技法有一定的了解。
3.了解实验结构的建立的方法和结构的协调性。
(三)实验步骤
1.确定创新方案,对方案的各个部分结构进行了解。
2.对方案的各个结构进行分类。
3.把模型的各个零件按种类和颜色分类,方便搭接的时候快速取用。
4.按照指导图书先搭接部分小结构。
5.将各个小结构装配起来,完成初步搭接。
6.放上珠子试验。
7.对错的地方进行分析和改进。
8.试验成功结束实验。
.9.注意问题:
(1)注意小零件的拼接方向。
(2)注意指导图结构方向和实际模型的结构的方向。
(四)完成后项目的照片
篇三:慧鱼实验报告
慧鱼机器人模型组装综合实验
南京工程学院
南京工程学院
南京工程学院
南京工程学院南京工程学院。