多连杆冗余移动机械臂建模与运动规划
超自由度多关节机械手臂的建模与控制研究
超自由度多关节机械手臂的建模与控制研究机械手臂是一种被广泛应用于工业、医疗等领域的机电一体化装置。
在许多应用中,机械手臂需要完成复杂的操作,例如拾取、搬运、装配和焊接等。
随着科技的进步,机械手臂的功能和工作场景变得越来越复杂,需要更高超的自由度和更灵活的控制。
因此,超自由度多关节机械手臂的建模与控制研究变得尤为重要。
一、多关节机械手臂的基本结构多关节机械手臂可以被看作是由多个单自由度机械臂组成的复合物,每个单自由度机械臂都包含一个电机、一个减速器、轴和连杆。
多关节机械手臂的具体结构和数量因应用而异,但一般包括4-6个关节,每个关节都有一个角度轴,本文将以4自由度机械手臂为例。
二、机械手臂运动学与动力学建模机械手臂运动学和动力学建模是机械手臂控制方案设计的基础。
机械手臂的运动学建模旨在寻找末端执行器的位置、朝向和速度等。
动力学建模旨在研究机械手臂的力学特性,例如负载、惯性和摩擦力等。
对于4自由度机械手臂,在建模过程中,可以采用Denavit-Hartenberg(D-H)方法来描述机械臂中各个关节相对位置的关系和变化。
该方法的主要思想可以简单地概括为将连杆和关节看做基元,并使用一些规定的变量来描述它们之间的相对位置关系。
通过这种方法建模,可以得到机械臂各个关节的状态量,包括关节角度、角速度和角加速度等数据。
在机械手臂的动力学研究中,可以使用牛顿-欧拉方程来描述机械手臂的动力学特性,具体来说,它描述了质量、惯性、重力和摩擦等力和机器人关节角度、速度和加速度之间的关系。
三、控制系统设计与实现机械手臂的自由度和运动灵活性很高,但也意味着控制系统设计和实现的难度也较大。
在机械手臂控制系统中,通常包含三种模式:位置模式、速度模式、力模式,可以根据不同的应用场合选择。
机械手臂的控制系统通常包含微处理器、传感器、电机驱动、电源等各种硬件设备和控制算法。
该系统设计的关键是实现机械手臂的逆运动学算法,它的主要任务是给定机械臂控制点的末端坐标,计算反向运动学解,并通过控制电机的转速和加速度等参数,以实现所需的机械手臂动作。
机械臂运动规划教程

机械臂运动规划教程一、机械臂运动规划的概念和重要性机械臂是一种能够模拟人手臂动作的设备,主要由关节、连接杆、驱动机构和末端执行器等组成。
机械臂在工业生产中广泛应用,可以完成重复且复杂的工作任务,提高生产效率和质量。
机械臂的运动规划是指在不碰撞到障碍物的前提下,使机械臂达到预定位置和姿态的过程,是机械臂控制中的关键环节。
机械臂运动规划的重要性不言而喻。
准确的运动规划可以确保机械臂完成预期的任务,提高生产效率。
而错误的规划可能导致机械臂碰撞到障碍物或无法到达目标位置,造成损坏或任务失败。
因此,了解机械臂运动规划的方法和技巧对于操作者和工程师来说都是至关重要的。
二、机械臂运动规划的基本原理1. 生成路径:机械臂运动规划的第一步是生成一条机械臂运动路径,即连接机械臂当前位置和目标位置的路径。
这可以通过各种路径规划算法来实现,例如最短路径算法、光滑曲线生成算法等。
2. 碰撞检测:在生成路径的过程中,需要进行碰撞检测,确保生成的路径不会与障碍物发生碰撞。
碰撞检测可以通过利用传感器数据和三维模型来实现,将机械臂和障碍物映射到同一坐标系中,进行碰撞检测和避障。
3. 轨迹插值:生成路径后,需要将其转化为机械臂可以执行的具体轨迹。
轨迹插值是指在生成的路径上插入一系列的关节点,使机械臂能够按照这些关节点进行运动。
常用的轨迹插值算法有线性插值、样条插值等。
4. 动力学优化:在进行轨迹插值之后,还需要考虑机械臂的动力学性能,如速度、加速度等。
需要根据机械臂的特性和任务需求,对轨迹进行动力学优化,以确保机械臂在运动过程中不会超出其运动能力范围。
三、机械臂运动规划的方法和技巧1. 基于规则的方法:基于规则的方法通常是根据机械臂的物理特性和任务需求,手动设计一系列的运动规则,以实现预定位置和姿态的运动。
这种方法适用于简单的任务和机械臂,但在复杂的场景中往往不够灵活。
2. 路径规划算法:路径规划算法是指根据机械臂的初始状态、目标位置和障碍物信息等输入,生成一条安全和高效的路径。
机械臂动力学建模与优化控制
机械臂动力学建模与优化控制1.引言机械臂作为一种高度灵活、多功能的机器人系统,在工业生产中起着重要作用。
机械臂的动力学建模和优化控制是实现其高效运动的关键。
本文将介绍机械臂动力学建模的基本原理以及优化控制方法,并探讨在实际应用中的一些挑战和解决方案。
2.机械臂动力学建模机械臂的动力学建模是对机械臂系统进行描述和分析的基础。
动力学建模的核心是建立机械臂的运动学和动力学方程。
2.1 运动学方程机械臂的运动学描述了机械臂末端执行器的位置、速度和加速度与关节的运动学参数之间的关系。
运动学方程可以通过解析解或数值解的方式得到。
常用的数值解法有迭代法和雅可比矩阵法。
2.2 动力学方程机械臂的动力学是研究力和加速度之间的关系。
动力学方程可以通过拉格朗日方程、牛顿-欧拉方程或D'Alembert原理等方法推导得到。
动力学方程的求解可以用来预测机械臂的运动轨迹和反馈控制。
3.机械臂优化控制机械臂的优化控制旨在通过调整机械臂的控制参数,使机械臂的性能达到最佳。
优化控制可以通过不同的方法实现,例如PID控制、模型预测控制和自适应控制等。
3.1 PID控制PID控制是一种经典的控制方法,通过对机械臂的位置、速度和加速度进行测量和反馈,在控制器中计算出合适的控制信号,调整机械臂的运动。
PID控制的优点是简单易实现,但对非线性系统的控制效果有限。
3.2 模型预测控制模型预测控制是一种基于动态模型的控制方法,通过对机械臂的运动进行建模和预测,计算出最佳的控制信号。
模型预测控制的优点是可以考虑系统的非线性和时变性,对不确定性具有较好的鲁棒性。
3.3 自适应控制自适应控制是一种能够根据系统的变化自动调整控制策略的方法。
自适应控制能够根据机械臂系统的输入和输出数据,自动调整控制参数,提高控制精度和稳定性。
4.挑战与解决方案在实际应用中,机械臂的动力学建模和优化控制面临一些挑战。
一方面,机械臂系统的非线性和耦合性使得动力学建模变得复杂。
冗余机械臂运动学及避障路径规划研究
避障路径规划
避障路径规划是研究如何在执行任务时避免机械臂与障碍物碰撞。常用的方 法包括基于图搜索的方法、基于物理的方法和混合方法。
1、基于图搜索的方法
基于图搜索的方法是一种基于符号人工智能的路径规划方法。它将机器人和 障碍物表示为节点和边,然后搜索无碰撞的路径。常用的算法包括 A*算法、 Dijkstra算法和 D*算法等。
以及相关文献的主要成果和不足。在此基础上,本次演示提出了七自由度冗 余机械臂避障控制的研究方法,并通过实验进行了验证。最后,本次演示总结了 研究成果和不足,并指出了需要进一步探讨的问题。
关键词:七自由度冗余机械臂, 避障控制,机器人技术
ቤተ መጻሕፍቲ ባይዱ
引言
随着机器人技术的不断发展,机器人已经在许多领域得到了广泛的应用。在 机器人技术领域中,机械臂是机器人的重要组成部分,它的运动灵活性和精度直 接影响了机器人的性能。在复杂的工作环境中,机械臂的避障控制是一个重要的 研究方向,
器,将机械臂的位姿误差、速度、加速度等作为输入,根据一定的规则进行 模糊化处理和推理,从而得到控制量。最后,我们通过实验验证了所提出的方法 的有效性和可靠性。
结果与讨论
通过对比实验,我们发现基于模糊逻辑的避障控制方法相比传统的方法具有 更高的控制精度和更强的环境适应性。在实验中,我们将机械臂在遇到障碍物前 的位姿作为参考位姿,通过控制机械臂的运动轨迹,使机械臂能够顺利地避开障 碍物。
冗余机械臂运动学
冗余机械臂的运动学模型是研究其运动规律和控制策略的基础。由于冗余机 械臂具有更高的自由度,其运动学模型比传统机器人更复杂。在确定机械臂末端 位置和姿态时,需要解决冗余运动学问题。常用的方法包括逆运动学、正运动学 和运动学逆解。
1、逆运动学
多连杆机构的运动学分析与合理设计

多连杆机构的运动学分析与合理设计多连杆机构作为机械系统中常见的一种形式,广泛应用于各种工程领域。
它由多个连杆和铰接连接的节点构成,能够实现复杂的运动路径。
在机器人技术、汽车工程和航天领域等众多应用中,多连杆机构的运动学分析和合理设计是至关重要的。
在进行多连杆机构的运动学分析时,需要首先确定各个连杆的长度、连杆的连接方式以及铰接的位置等。
通过这些参数的确定,可以进一步推导出机构的运动方程和运动学限制条件。
常见的多连杆机构包括摇杆机构、曲柄滑块机构和平面四杆机构等。
以摇杆机构为例,它由一个直杆和两个转轴构成。
当一个转动的驱动件作用于摇杆机构时,整个机构的运动路径可以被描述为抛物线形状。
通过分析抛物线的特性,可以确定驱动件的转速和转动角度对机构运动轨迹的影响,从而实现对机构运动的控制。
曲柄滑块机构是另一种常见的多连杆机构,它由一个转动的曲柄和一个滑块构成。
曲柄滑块机构的运动轨迹通常是椭圆形状,可以通过改变曲柄的转动角度和滑块位置来实现不同的运动路径。
在实际应用中,曲柄滑块机构常被用于发动机和机械传动系统中,其运动学分析对于提高机构的效率和可靠性至关重要。
平面四杆机构是一种更为复杂的多连杆机构,它由四个连杆和四个铰接节点组成。
平面四杆机构的运动学分析涉及到大量的几何关系和运动学方程的推导,需要利用刚体座标系和几何约束条件进行求解。
通过解析解或数值解的方法,可以求得平面四杆机构的运动轨迹、速度和加速度等运动学参数,为机构的合理设计提供了重要依据。
在多连杆机构的合理设计中,除了运动学分析以外,还需要考虑机构的结构刚度、平衡性和可靠性等因素。
合理的机构设计可以提高机构的性能,并确保机构能够承受预期的载荷和工作环境。
此外,还需要考虑机构的制造成本和装配难度等实际因素,以实现设计与制造的良好平衡。
总之,多连杆机构的运动学分析和合理设计是一项复杂而重要的任务。
通过分析机构的运动学特性和设计要求,可以实现对机构运动路径和性能的优化控制。
机械手臂的运动学建模与轨迹规划研究
机械手臂的运动学建模与轨迹规划研究机械手臂是一种可编程的多关节机械装置,可以模拟人类手臂的运动。
它广泛应用于工业自动化、医疗手术、危险环境探测等领域。
为了实现精确的操作,必须对机械手臂的运动学进行建模和轨迹规划研究。
本文将探讨机械手臂的运动学建模与轨迹规划技术。
一、机械手臂的运动学建模机械手臂的运动学建模是指通过数学模型描述机械手臂各关节之间的几何关系。
在建模过程中,需要确定机械手臂的结构参数、关节类型和运动约束。
首先,机械手臂的结构参数包括关节长度、关节角度、终端执行器等信息。
这些参数的准确度对于建模的精确性至关重要。
其次,机械手臂的关节类型有旋转关节和平移关节两种。
旋转关节允许关节绕特定轴旋转,平移关节允许关节在特定方向上平移。
根据具体的机械手臂结构,确定关节类型。
最后,机械手臂的运动约束包括关节角度限制、关节之间的相互制约关系等。
通过分析机械手臂的运动自由度,可以得出关节运动的约束条件。
有了上述信息,可以建立机械手臂的运动学模型。
一般情况下,机械手臂的运动学模型采用基于世界坐标系的描述方式,即通过坐标变换来描述机械手臂末端执行器的位置和姿态。
常用的运动学模型方法有解析法和数值法。
解析法是一种基于几何平面的运动学模型方法,通过解析几何和三角学方法推导机械手臂的位置和姿态表达式。
这种方法具有运算速度快、精度高的优点,适用于简单的机械手臂。
数值法是一种通过数值计算方法解决机械手臂运动学问题的方法。
它通过迭代计算机械手臂的位置和姿态,通过逼近法来获取解,适用于复杂的机械手臂。
二、机械手臂的轨迹规划机械手臂的轨迹规划是指根据特定的运动需求,确定机械手臂末端执行器的运动轨迹。
轨迹规划的目标是使机械手臂在特定的时间内准确地达到目标位置和姿态。
在进行轨迹规划之前,需要明确运动目标,包括起始位置、目标位置和时间要求等。
然后,根据机械手臂的运动学模型和约束条件,确定机械手臂的关节角度和速度。
常用的轨迹规划方法有两点直线法、多点插值法和样条插值法等。
冗余机器人的运动学及轨迹规划的研究

02
初始条件
设定机器人运动的初始条件,如关节角度、速度和加速度等。
冗余机器人的轨迹规划方法
03
轨迹规划是一种通过设定机器人各关节的运动参数,来控制机器人运动的方法。
定义
使得机器人能够按照预设的路径移动,同时满足运动学和动力学约束。
目标
先根据任务需求确定机器人末端的位置和姿态,再根据逆运动学计算各关节的运动轨迹。
国内外研究现状
阐述冗余机器人在未来机器人领域的发展前景和技术趋势,如人工智能、机器视觉等技术的应用。
技术发展趋势
研究现状与发展
研究内容与方法
要点三
研究内容
详细阐述本研究的研究对象、研究内容和研究目标,包括冗余机器人的运动学分析、轨迹规划算法的设计与实现等。
要点一
要点二
研究方法
介绍本研究采用的研究方法和技术路线,包括建立数学模型、算法设计和实现等。
冗余机器人的运动学及轨迹规划的研究
xx年xx月xx日
引言冗余机器人的运动学模型冗余机器人的轨迹规划方法冗余机器人的运动控制策略实验与性能评估结论与展望
contents
目录
引言
01
冗余机器人的发展历程和现状
运动学与轨迹规划在机器人领域中的重要性
研究意义
研究背景与意义
介绍国内外在冗余机器人运动学及轨迹规划方面的研究进展,包括关键技术、研究重点、难点等。
冗余机器人的运动控制策略
04
控制策略的基本框架
机器人模型
建立详细的机器人模型,包括关节、连杆、驱动器等,以便进行控制策略的设计。
介绍PD控制的基本原理,包括比例(P)和微分(D)控制。
PD控制原理
根据机器人模型和PD控制原理,设计各关节的PD控制器。
机械手臂的运动学建模与轨迹规划方法研究
机械手臂的运动学建模与轨迹规划方法研究近年来,机械手臂的应用越来越广泛,成为现代工业生产和科学研究的重要组成部分。
机械手臂的运动学建模和轨迹规划是机械手臂技术的关键问题,研究这些问题可以提高机械手臂的自主性和准确性。
一、机械手臂的运动学建模机械手臂的运动学建模是研究机械手臂运动规律的基础。
它描述了机械手臂末端执行器相对于基座的位置和姿态。
常用的方法有解析法和数值法。
解析法是通过分析机械结构和关节运动的几何关系,推导机械手臂的位置和姿态方程。
这种方法适用于简单的机械手臂结构,但对于复杂的机械手臂,解析法往往过于复杂,不易求解。
数值法是通过数值计算,逐步求解机械手臂的位置和姿态。
最常用的数值法是迭代法和解微分方程法。
迭代法在每个时间步长内计算机械手臂的位置和姿态,通过迭代过程逐渐收敛。
解微分方程法则通过求解机械手臂的运动微分方程,得到准确的位置和姿态。
二、机械手臂的轨迹规划方法机械手臂的轨迹规划是使机械手臂按照特定路径运动的方法。
它可以实现机械手臂的路径控制和精确定位。
常见的轨迹规划方法有插补法、优化法和仿真法。
插补法是通过在机械手臂关节之间插补中间点,来实现机械手臂的平滑运动。
这种方法可以通过线性插补、圆弧插补等方式,将目标点与起始点相连接,从而确定机械手臂的运动轨迹。
优化法是通过优化算法,寻找最优的机械手臂轨迹规划方案。
优化法能够考虑多个约束条件,并给出最佳的轨迹解决方案。
常见的优化方法有遗传算法、粒子群算法等。
仿真法是通过计算机模拟,模拟机械手臂的运动轨迹。
这种方法可以提前预测机械手臂在不同轨迹下的运动情况,帮助工程师进行设计和调试,减少实验成本和时间。
三、机械手臂运动学建模与轨迹规划方法的研究进展随着科学技术的不断发展,机械手臂运动学建模与轨迹规划方法的研究也有了长足的进展。
研究者们提出了许多新的方法和算法,使机械手臂的运动更加灵活和智能。
例如,现在有一种基于深度学习的运动学建模方法。
这种方法利用神经网络模型,通过训练数据学习机械手臂的运动规律,实现运动学建模。
多自由度机械臂的设计以及运动仿真
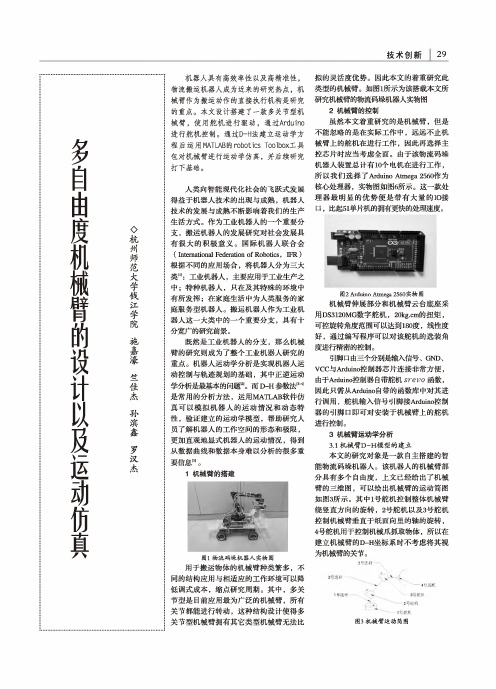
技术创新 29◊杭州师范大学钱江学院施嘉濠竺佳杰 孙滨鑫罗汉杰多自由度机械臂的设计以及运动仿真机器人具有高效率性以及高精准性, 物流搬运机器人成为近来的研究热点,机械臂作为搬运动作的直接执行机构是研究 的重点。
本文设计搭建了一款多关节型机械臂,使用舵机进行驱动,通过Arduino进行舵机控制。
通过D-H 法建立运动学方 程后运用MATLAB 的robotics Toolbox 工具包对机械臂进行运动学仿真,并后续研究 打下基础。
人类向智能现代化社会的飞跃式发展 得益于机器人技术的出现与成熟,机器人 技术的发展与成熟不断影响着我们的生产生活方式。
作为工业机器人的一个重要分 支,搬运机器人的发展研究对社会发展具有很大的积极意义。
国际机器人联合会 (International Federation of Robotics , IFR )根据不同的应用场合,将机器人分为三大 类叫工业机器人,主要应用于工业生产之 中;特种机器人,只在及其特殊的环境中 有所发挥;在家庭生活中为人类服务的家庭服务型机器人。
搬运机器人作为工业机器人这一大类中的一个重要分支,具有十 分宽广的研究前景。
既然是工业机器人的分支,那么机械臂的研究则成为了整个工业机器人研究的 重点。
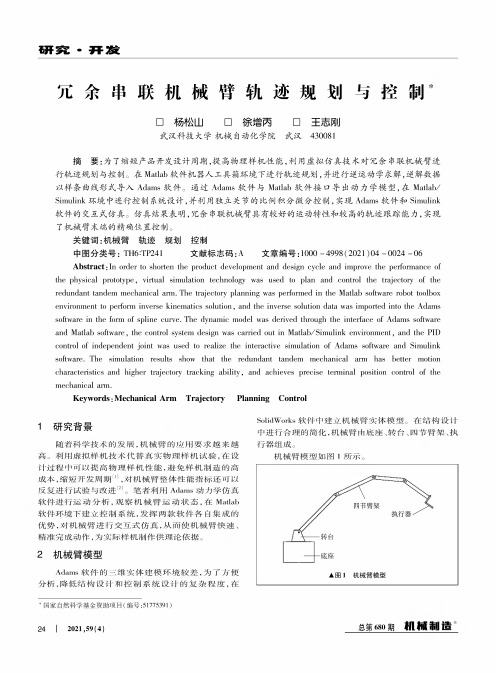
机器人运动学分析是实现机器人运 动控制与轨迹规划的基础,其中正逆运动学分析是最基本的问题鷺而D-H 参数法X是常用的分析方法,运用MATLAB 软件仿 真可以模拟机器人的运动情况和动态特 性,验证建立的运动学模型,帮助研究人员了解机器人的工作空间的形态和极限,更加直观地显式机器人的运动情况,得到 从数据曲线和数据本身难以分析的很多重 要信息曲□1机械臂的搭建图1物流码垛机器人实物图用于搬运物体的机械臂种类繁多,不 同的结构应用与相适应的工作环境可以降低调式成本,缩点研究周期。
其中,多关节型是目前应用最为广泛的机械臂,所有关节都能进行转动,这种结构设计使得多关节型机械臂拥有其它类型机械臂无法比 拟的灵活度优势。
移动机器人冗余特性下的运动规划与协调控制

协调控制在冗余特性下的优化策略
冗余特性
移动机器人在结构或功能上存在多余的 配置,以提高系统的容错性和灵活性。
VS
优化策略
利用冗余特性,设计更高效的协调控制策 略,提高机器人的整体性能。
04
移动机器人冗余特性下的运动 规划与协调控制实例分析
实例一
总结词
强化学习算法在冗余特性下的应用,通过与环境交互不断优化运动规划策略,实现高效 、灵活的运动控制。
运动规划的定义与分类
运动规划定义
根据移动机器人的起点和终点,规划 出一条安全、有效的路径。
运动规划分类
全局运动规划与局部运动规划。全局 运动规划关注从起点到终点的全局路 径,而局部运动规划则关注机器人当 前位置到下一个位置的局部路径。
运动规划算法的原理与实现
运动规划算法原理
基于图搜索、样例搜索、优化方法等算法原理,构建出适用于不同场景和需求的 运动规划算法。
在移动机器人中,冗余特性指的是在完成特定任务时,机器人具有的超出必要 自由度的特性。这些自由度使得机器人在运动过程中能够适应各种环境和任务 需求。
冗余特性的分类
根据冗余自由度的数量和性质,可以将冗余特性分为局部冗余和全局冗余。局 部冗余是指在某个特定关节或运动范围内存在的多余自由度,而全局冗余则是 机器人在整体运动过程中存在的多余自由度。
冗余特性带来的挑战与机遇
挑战
冗余特性的引入增加了机器人系统的复杂性和控制难度,需 要解决如何有效利用冗余特性、如何协调控制多个自由度等 问题。
机遇
利用冗余特性可以提高机器人的适应性和灵活性,为解决复 杂任务提供了更多可能性。同时,通过优化和协调控制,可 以进一步挖掘机器人的性能潜力。
02
运动规划在移动机器人中的应 用
机械手臂运动学建模与控制策略研究
机械手臂运动学建模与控制策略研究导语:机械手臂是一种能模仿和执行人类手臂动作的机械装置,广泛应用于制造业、医疗领域和科学研究等领域。
机械手臂的运动学建模与控制策略研究是一个关键性的领域,它能够使机械手臂实现高精度、高速度和高灵活性的运动。
本文旨在探讨机械手臂的运动学建模方法和控制策略,以及未来的研究方向。
一、机械手臂运动学建模方法机械手臂的运动学建模是指确定机械手臂末端执行器在关节变量给定情况下的位置和姿态。
一种常用的方法是基于DH参数(Denavit-Hartenberg参数)的运动学建模方法。
DH参数为机械手臂的每个关节定义一个坐标系,包括三个旋转关节和三个平移关节。
通过建立坐标系之间的几何变换矩阵,可以计算机械手臂末端执行器的位置和姿态。
此外,还有一种基于四元数的运动学建模方法。
四元数是一种用来表示姿态的数学工具,它可以有效地描述旋转运动。
通过将机械手臂的每个关节表示为四元数并进行运算,可以得到末端执行器的位置和姿态。
二、机械手臂的控制策略机械手臂的控制策略包括位置控制和姿态控制两个方面。
位置控制是指使机械手臂末端执行器达到所期望的位置坐标,姿态控制是指使机械手臂末端执行器达到所期望的姿态。
常用的位置控制策略包括PID控制和模糊控制。
PID控制是一种基于反馈的控制方法,通过调节比例、积分和微分参数,使机械手臂末端执行器的位置误差最小化。
模糊控制是一种基于经验的控制方法,它通过将输入和输出之间的关系用模糊语言来描述,从而实现控制。
姿态控制涉及到旋转运动的控制,常用的方法包括PID控制和基于四元数的控制。
PID控制方法可以通过控制机械手臂的转动速度和加速度来达到所期望的姿态。
基于四元数的控制方法则可以通过计算四元数之间的误差来实现姿态控制。
三、机械手臂运动学建模与控制策略的应用机械手臂的运动学建模和控制策略在各个领域有着广泛的应用。
在制造业中,机械手臂可以进行复杂的装配和加工操作,提高生产效率和质量。
多连杆冗余移动机械臂建模与运动规划
2 R sac s tt o uo ai , a g h u D a z U i ri , a gh u 3 0 1 , hn ) . ee rh I tue f tm t n H n z o in i n es y H n z o 1 0 8 C ia ni A o v t
r c al pol adteprm t so t t edmoe a pi i db u nu ee ca oi m ( — A) T e h b rbe n aa ee f oe i fl dl r o t z yq atm gn t grh a e m h r p na i l e m e il t QG . o
p a a n p ltr a go a t n p a n n t o sp o o e o e u d n bl np lt r n t i su y r p l ln rma i u ao , lb l moi ln ig meh d i r p s d f rrd n a tmo i ma i u ao .I hs t d ,e u - o e s e p tn ilf n t n i d f d b n rd c n aey fco n o AP o p e e tmo i np lt rfo g a n i oe t u ci s mo i e y ito u i g a s f t a tr i t F t r v n b l ma i u ao m o la - v a o i e r
机械臂的运动规划与控制策略研究
机械臂的运动规划与控制策略研究机械臂是一种广泛应用于工业自动化领域的重要装置,具有灵活性高、重复精度高、载荷能力大等优点。
为了实现机械臂的高效运动,需要研究合理的运动规划与控制策略。
本文将从机械臂的运动规划和控制两个方面进行详细分析与研究。
1. 机械臂的运动规划机器人运动规划是指确定机器人在工作空间内的运动轨迹和关节角度的过程。
在机械臂的运动规划中,常用的方法包括几何方法、优化方法、机器学习方法等。
首先,几何方法是常用的机械臂运动规划方法之一。
它通过对机械臂的几何模型进行分析和计算,确定机械臂关节角度以及末端执行器所需的位置和姿态。
其中,正向运动学可根据关节角度计算出机械臂末端的位置和姿态,逆向运动学则根据末端位置和姿态求解关节角度。
几何方法的优点是简单易懂,计算速度快,但是无法考虑到运动约束和动力学因素。
其次,优化方法在机械臂运动规划中也得到了广泛应用。
优化方法通过定义目标函数和约束条件,以达到最优化问题的求解。
例如,可以定义目标函数为机械臂末端位置的误差,约束条件为运动学和动力学方程,通过求解最优化问题来确定机械臂的运动轨迹和关节角度。
最后,机器学习方法在机械臂的运动规划中具有较大的潜力。
机器学习可以通过大量的数据训练模型,从而使机械臂能够自动学习并优化其运动规划。
例如,可以通过使用神经网络模型对机械臂的运动进行建模和预测,从而实现更加高效和准确的运动规划。
2. 机械臂的控制策略机械臂的控制策略是指对机械臂的位置、速度和力矩进行控制的方法。
常用的控制策略包括PID控制、模型预测控制、自适应控制等。
首先,PID控制是最常用的机械臂控制策略之一。
PID控制通过调节比例、积分和微分三个控制参数来实现对机械臂位置或速度的闭环控制。
PID控制可以根据系统的实际反馈信息进行调整,以达到期望的控制效果。
然而,PID控制存在参数调节困难和对系统动态特性要求高等问题。
其次,模型预测控制是一种基于机械臂数学模型的控制策略。
机械手臂的运动学建模与控制
机械手臂的运动学建模与控制机械手臂是一种具有多关节、自由度高的机械装置,可以模拟人类手臂的运动。
它在工业自动化、医疗卫生、科学研究等领域得到广泛应用。
机械手臂的运动学建模与控制是实现其精确控制和运动规划的基础,对于提高机械手臂工作效率和精度具有重要意义。
一、机械手臂的运动学建模机械手臂的运动学建模主要包括位置、速度和加速度的描述。
其运动学模型可以根据机械手臂的结构和约束条件进行建立。
在机械臂的运动学描述中,关节坐标和笛卡尔坐标是常用的表示方式之一。
关节坐标方式下,机械手臂的运动由各个关节的角度控制;而笛卡尔坐标方式下,机械手臂的运动由位置和姿态来描述,通过控制末端执行器的位置和姿态来实现。
这两种方式各有优势,可以根据具体需求选择适当的方式。
机械手臂的运动学建模还需要考虑机构的约束和结构参数。
例如,机械手臂的关节范围限制、机构连杆长度等因素都会对其运动学模型产生影响。
建立准确的运动学模型对于机械手臂的控制和运动规划具有重要意义。
二、机械手臂的运动学求解机械手臂的运动学求解是指根据给定的位置和姿态,计算机械手臂各关节的角度。
解决机械手臂的运动学求解问题有多种方法,常见的有几何法、解析法和数值法。
几何法是最简单、直观的方法之一。
通过几何法可以根据机械手臂结构和运动学模型,使用三角函数和向量运算等基本几何知识,推导出求解关节角度的表达式。
这种方法适用于简单机械手臂结构,求解速度较快,但对于复杂机械手臂结构来说,求解过程较为繁琐。
解析法是通过数学分析推导出解析解的方法。
该方法可以将机械手臂的运动学问题转化为代数方程组的求解问题,通过求解方程组得到解析解。
解析法适用于简单机械手臂和特定的运动规划问题,能够得到准确的解析解,但在复杂结构和大规模问题上的应用较为困难。
数值法是通过数值计算得到近似解的方法。
该方法利用数值优化算法,根据机械手臂的约束条件和目标要求,通过迭代计算逼近解。
数值法适用于任意机械手臂结构和复杂运动规划问题,求解结果较为精确,但计算量较大。
冗余度机械臂的运动规划容错算法研究
冗余度机械臂的运动规划容错算法研究随着机器人在工业、服务业等各个领域中发挥的作用越来越突出,我国对于机器人的研发和应用也给予了越来越多的重视。
在冗余度机械臂的实际应用中,机械臂的工作精度是影响其操作性能的重要指标之一。
由于机械臂在生产加工、安装和工作过程中由于各方面因素的影响总是难免会产生末端位置误差,很大程度上影响了任务的执行精度,使得机械臂应用的准确性和可靠性下降。
本文首先归纳总结了位置误差的产生原因,然后对任务执行过程中位置误差可能产生的不同阶段以及造成的不同影响进行了分析和研究,并提出了相应的解决方案,根据任务复杂程度的不同采用了不同的位置误差容错算法。
为验证算法的有效性,对不同的容错算法进行了计算机仿真研究。
本文具体研究内容如下:(1)本文首先针对机械臂进行初始位姿调整后,机械臂末端执行器位置可能偏离期望位置,从而导致末端出现初始位置误差这一问题,提出了一种基于神经动力学设计方法的初始位置误差容错运动规划方案。
该方案通过伪逆方法在速度层上进行逆向运动学求解,能在任务执行过程中快速平滑地消除初始位置误差,改善了机械臂的工作精度。
(2)考虑到伪逆方法在解决机械臂物理极限约束问题的局限性,本文提出了一种基于二次规划方法的初始位置误差容错方案。
设计可用于位置容错的最小化二次型性能指标,将关节物理极限考虑到容错方案中,利用原对偶神经网络求解器对该容错方案进行实时求解,消除机械臂末端存在的初始位置误差。
(3)在机械臂执行食品配料的任务过程中,由于基座的移动导致任务过程中误差不断产生的问题,通过定义实时的位置误差,将神经动力学方法引入到位置误差消除中,采用基于伪逆的方法对任务过程中的位置误差进行消除。
(4)针对机械臂在木材切割过程中由于其工作空间受约束,从而难以完成大面积木材切割的问题。
本文提出了一种将基座安装在移动导轨上以扩大机械臂工作空间的方法,该方法通过协调机械臂末端期望的速度与基座进行移动的速度来重构机械臂末端的笛卡尔速度,使得机械臂能够平滑且准确地进行轨迹跟踪。
冗余串联机械臂轨迹规划与控制
社开究・开发冗余串联机械臂轨迹规划与控制口杨松山 口徐增丙 口王志刚武汉科技大学机械自动化学院 武汉 430081摘 要:为了缩短产品开发设计周期,提高物理样机性能,利用虚拟仿真技术对冗余串联机械臂进 行轨迹规划与控制。
在M u IU 软件机器人工具箱环境下进行轨迹规划,并进行逆运动学求解,逆解数据以样条曲线形式导入Adams 软件。
通过Adams 软件与Mutb 软件接口导出动力学模型,在M s WU/Simulink 环境中进行控制系统设计,并利用独立关节的比例积分微分控制,实现Adams 软件和Simulink软件的交互式仿真。
仿真结果表明, 机械 有较好的运动特性和较高的轨迹跟踪能力,实现了机械臂末端的精确位置控制。
关键词:机械臂轨迹规划控制中图分类号:THCTP241 文献标志码:A 文章编号$1000 -4998 (2021) 04 -0024 -06Abstrah:: In ordeo te shorten the product development and desion cycle and inipTovv the performance ofthe physical prototype , virtual simulation technolooy was used te plan and control the trajectoo of theredundant tandem mechanicol arm. The trajectoro planning was performed in the Matlab software robot toolbox environment to perform inverse kinematics solution , and the inverse solution data was irnpoTted into the Adamssolwue in the form of spline curw. The dynamic moder was derived through the interface of Adams solwueand Matlab softwue, the control system desion was cerried out in Matlab^Simulink environment , and the PITcontooeooindependenteointwaCuCed tooeaeieetheinteoactiveCimueation ooAdamCCootwaoeand Simueink Cootwaoe.The Cimulation oeCult Chow thatthe oedundant tandem mechanical aom haC be t eo motion chaoacteoiticCand higheotoaeectooytoackingability , and achieveCpoecieteominalpoCition contooloothe mechanicalaom.Keywords : Mechanical Arm Trajectory Planning Control1研究背景随着科学技术的发展,机的应用要求越来越高。
一种冗余机械臂的耦合规划控制算法
一种冗余机械臂的耦合规划控制算法冗余机械臂是指具有比实现任务所需的最小自由度更多的机械臂。
冗余的自由度可以提供更多的灵活性和机械臂的运动空间。
然而,冗余机械臂的耦合规划和控制是一个复杂的问题,需要综合考虑姿态约束、碰撞避免、最优路径等多个因素。
一种常见的冗余机械臂的耦合规划控制算法是基于运动优化的方法。
其基本思想是将冗余自由度的运动视为优化问题,通过优化目标函数来寻找最优的机械臂轨迹。
以下是该算法的详细步骤:1.建立机械臂的运动模型,包括关节角度、关节速度和关节加速度等变量。
可以采用雅可比矩阵或类似方法来描述机械臂的运动关系。
2.设计目标函数,可以是机械臂末端的位姿误差、能耗最小、运动轨迹最优等。
目标函数可以是线性或非线性的,根据具体需求进行选择。
3.确定优化问题的约束条件,包括关节速度、加速度限制、关节角度范围、碰撞避免等。
约束条件的选择与实际应用相关,需要综合考虑机械臂的安全性和运动可行性。
4.使用优化算法求解目标函数的最优解。
常见的优化算法包括线性规划、非线性规划、遗传算法、粒子群算法等。
选择适合的优化算法可以提高算法的效率和精确度。
5.根据优化结果,生成机械臂的轨迹规划。
将优化得到的关节角度、速度和加速度转化为机械臂的轨迹点,保证机械臂的运动顺畅和稳定。
6.设计控制器以实现机械臂的运动控制。
可以采用PID控制器、模型预测控制器等方法来实现机械臂的闭环控制,保证机械臂的稳定性和精度。
以上是一种基于运动优化的冗余机械臂耦合规划控制算法的基本步骤。
然而,实际问题中可能还涉及到更多的因素,如力控制、实时性要求等,需要根据具体情况进行相应的调整和改进。
冗余机械臂的耦合规划和控制是一个多学科交叉的研究领域,还有很多挑战和问题需要进一步研究和解决。
多连杆冗余移动机械臂建模与运动规划
能量的规划路线,能耗函数如下:
k
Σ f(θ1,θ2,…,θn)= θi .
(2)
i=2
1.2 Arm-PSO 在逆运动学中的应用
冗余移动机械臂运动学逆解的存在性证明
和求取是一大难点,国内外研究者对于此问题进
行了广泛的研究。模型的求解分为两类: 第一类
问题可以通过确定性过程解决,此类问题属于计
算性问题。 第二类问题无法使用解析的方法解
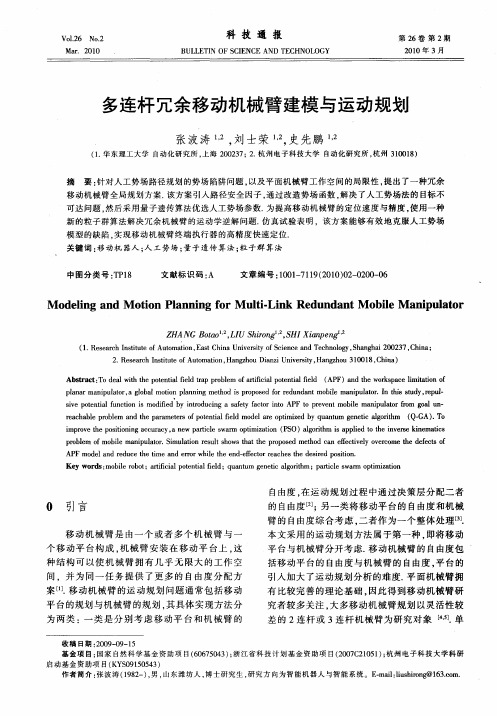
到 6 起始端的坐标系, T6 为末端执行器坐标系.
其机械结构如下: 移动平台为差分驱动平台(两
个 差 分 驱 动 驱 动 轮 与 一 个 随 动 轮 ), 长 、宽 、高 分
别为 alength,awidth,aheight. 旋转 ,i=1,2,…5…. 第
0 引言
移动机械臂是由一个或者多个机械臂与一 个移动平台构成,机械臂安装在移动平台上,这 种结构可以使机械臂拥有几乎无限大的工作空 间, 并为同一任务提供了更多的自由度分配方 案 .[1] 移动机械臂的运动规划问题通常包括移动 平台的规划与机械臂的规划,其具体实现方法分 为两类: 一类是分别考虑移动平台和机械臂的
一关节与平台具有重复自由度的是为了增加系
统灵活性,避免末端执行器定位时移动平台频繁
旋 转. 各 连 杆 长 度 分 别 为 w1,w2,w3,w4,w5,w6, 基 座高 h,移动平台相对于大地、基座顶端相对于
移动平台坐标系变换矩阵分别为:
! "
cosφ
"
-sinφ
0
x$
r
% %
sTr=
" " " " "
j
6
jz
wisin(
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
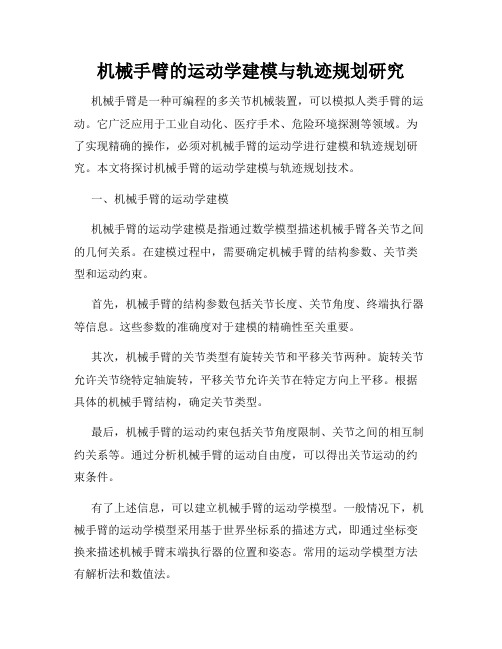
图 1 移动机械臂的连杆坐标系 Fig.1 Assignment of link frames for the mobile manipulator
0 引言
移动机械臂是由一个或者多个机械臂与一 个移动平台构成,机械臂安装在移动平台上,这 种结构可以使机械臂拥有几乎无限大的工作空 间, 并为同一任务提供了更多的自由度分配方 案 .[1] 移动机械臂的运动规划问题通常包括移动 平台的规划与机械臂的规划,其具体实现方法分 为两类: 一类是分别考虑移动平台和机械臂的
一关节与平台具有重复自由度的是为了增加系
统灵活性,避免末端执行器定位时移动平台频繁
旋 转. 各 连 杆 长 度 分 别 为 w1,w2,w3,w4,w5,w6, 基 座高 h,移动平台相对于大地、基座顶端相对于
移动平台坐标系变换矩阵分别为:
! "
cosφ
"
-sinφ
0
x$
r
% %
sTr=
" " " " "
Abstract:To deal with the potential field trap problem of artificial potential field (APF) and the workspace limitation of planar manipulator,a global motion planning method is proposed for redundant mobile manipulator. In this study,repulsive potential function is modified by introducing a safety factor into APF to prevent mobile manipulator from goal unreachable problem and the parameters of potential field model are optimized by quantum genetic algorithm (Q-GA). To improve the positioning accuracy,a new particle swarm optimization (PSO) algorithm is applied to the inverse kinematics problem of mobile manipulator. Simulation result shows that the proposed method can effectively overcome the defects of APF model and reduce the time and error while the end-effector reaches the desired position. Key words:mobile robot; artificial potential field; quantum genetic algorithm; particle swarm optimization
自由度,在运动规划过程中通过决策层分配二者 的自由度[2]; 另一类将移动平台的自由度和机械 臂的自由度综合考虑,二者作为一个整体处理 .[3] 本文采用的运动规划方法属于第一种,即将移动 平台与机械臂分开考虑. 移动机械臂的自由度包 括移动平台的自由度与机械臂的自由度,平台的 引入加大了运动规划分析的难度. 平面机械臂拥 有比较完善的理论基础,因此得到移动机械臂研 究者较多关注,大多移动机械臂规划以灵活性较 差的 2 连杆或 3 连杆机械臂为研究对 象 . 单 [4,5]
适用于移动机械臂逆运动学求解,可以极大的提
高定位速度与精度。 在过去的十年中,很多学者
对 PSO 的数值计算能力进行了深入的研究,本文
根 据 文 献 [8]提 出 的 PSACO 算 法 和 移 动 机 械 臂
定位的特点, 构造移动机械臂专用搜索算法
(Arm-PSO). 其位置速度更新公式为
vj t+1
能量的规划路线,能耗函数如下:
k
Σ f(θ1,θ2,…,θn)= θi .
(2)
i=2
1.2 Arm-PSO 在逆运动学中的应用
冗余移动机械臂运动学逆解的存在性证明
和求取是一大难点,国内外研究者对于此问题进
行了广泛的研究。模型的求解分为两类: 第一类
问题可以通过确定性过程解决,此类问题属于计
算性问题。 第二类问题无法使用解析的方法解
收 稿 日 期 :2009-09-15 基金项目:国家自然科学基金资助项目(60675043);浙江省科技计划基金资助项目(2007C21051);杭州电子科技 大学科研 启 动 基 金 资 助 项 目 (KYS09150543) 作者简介:张波涛(1982-),男,山东潍坊人,博士研究生,研究方向为智能机器人与智能系统。 E-mail:liushirong@.
(1. Research Institute of Automation,East China University of Science and Technology,Shanghai 200237,China; 2. Research Institute of Automation,Hangzhou Dianzi University,Hangzhou 310018,China)
机械臂运转过程中会消耗较多的能量,而任何可
202
科技通报
第 26 卷
6
Σ 达 空 间 的 定 位 均 可 在
i=2
θi≤
π 2
内实现. 为节省
能量,减少关节运动幅度,本文将机械臂单关节
k
Σ 运动空间限制在 [-π/2,π/2],
i=2
θi≤
π 2
,k=2,
…,6 . 当目标点进入移动机械臂工作空间时,通
中图分类号:TP18
文献标识码:A
文章编号:1Байду номын сангаас01-7119(2010)02-0200-06
Modeling and Motion Planning for Multi-Link Redundant Mobile Manipulator
ZHANG Botao1,2,LIU Shirong1,2,SHI Xianpeng1,2
过旋转第一关节使得目标点跟机械臂处于同一
平面,以 T0 为基准坐标系,获得目标位置在 T0 中 的坐标(pgx ,pgy ,pgz ),移动机械臂进入定位状态,运
动学方程如下:
j j
6
i
Σ Σ pj
j
6
jx
=w1+
wicos(
θj)
j j
i=2
j=2
j
p =0 j
j j
6 y
.
j
j j
6
i
Σ Σ p = j
j
6
jz
wisin(
θj)
j j
i=2
j=2
(1)
其中,第
θj
为第
i
个关节的转角.
p6 x
,p6y
,p6z
为
末
端
执行器的位置.
机械臂不能与地面相触, 且不能触及自身,
根据冗余机械臂的任务的特点性质以及多边形
内角和为定值的性质,关节运动空间须满足下列
约束:
k
Σi = 2
θi≤
π 2
,k=2,…,6.
存在多组可行解时,可以通过能耗指标选择节省
本文运动学模型和运动规划方法具有通用 性,可以根据具体的移动机械臂的连杆数目或冗 余自由度修改运动学模型. 这类机器人因为结构 简单、稳定性高在军事和工业生产领域得到了广 泛的应用. 例如: iRobot 公司的最新的军用机器 人 SUGV Early、曾经热销的 PackBot 就属于此类 机器人.
到 6 起始端的坐标系, T6 为末端执行器坐标系.
其机械结构如下: 移动平台为差分驱动平台(两
个 差 分 驱 动 驱 动 轮 与 一 个 随 动 轮 ), 长 、宽 、高 分
别为 alength,awidth,aheight. 移动机械臂的第一关节绕 z0
轴旋转 ,其余 关节绕 yi 轴旋转 ,i=1,2,…5…. 第
摘 要:针对人工势场路径规划的势场陷阱问题,以及平面机械臂工作空间的局限性,提出了一种冗余 移动机械臂全局规划方案. 该方案引入路径安全因子,通过改造势场函数,解决了人工势场法的目标不 可达问题,然后采用量子遗传算法优选人工势场参数. 为提高移动机械臂的定位速度与精度,使用一种 新的粒子群算法解决冗余机械臂的运动学逆解问题. 仿真试验表明, 该方案能够有效地克服人工势场 模型的缺陷,实现移动机械臂终端执行器的高精度快速定位. 关键词:移动机器人;人工势场;量子遗传算法;粒子群算法
1 冗余移动机械臂的运动学与逆运 动学建模
本文中移动平台与机械臂的自由度分开考 虑,在移动机械臂大范围运动时,机械臂处于阻 碍面最小的姿态,与平台保持相对静止,使得移 动机械臂具有较小的惯性,且不容易碰到障碍。 当 目标点进入移动机械臂工作空间时,平台通过旋 转使得目标点跟机械臂处于同一平面上,移动机 械臂进入定位状态,此时平台不动,机械臂末端执 行器根据不同精度需要进行定位,如图 1 所示。 1.1 移动机械臂的运动学
决,只能通过迭代逼近等数值搜索方法来解决,
冗余移动机械臂的逆运动学求解问题就属于这
类问题。 数值搜索机制不同,其搜索能力必然不
同。 为了提高机械臂定位精度与运动的实时性,