YT603B1红外对射光电开关 说明书
光电开关说明书

光电开关说明书①漫反射式光电开关:它是一种集发射器和接收器于一体的传感器,当有被检测物体经过时,物体将光电开关发射器发射的足够量的光线反射到接收器,于是光电开关就产生了开关信号。
当被检测物体的表面光亮或其反光率极高时,漫反射式的光电开关是首选的检测模式。
②镜反射式光电开关:它亦集发射器与接收器于一体,光电开关发射器发出的光线经过反射镜反射回接收器,当被检测物体经过且完全阻断光线时,光电开关就产生了检测开关信号。
③对射式光电开关:它包含了在结构上相互分离且光轴相对放置的发射器和接收器,发射器发出的光线直接进入接收器,当被检测物体经过发射器和接收器之间且阻断光线时,光电开关就产生了开关信号。
当检测物体为不透明时,对射式光电开关是最可*的检测装置。
④槽式光电开关:它通常采用标准的U字型结构,其发射器和接收器分别位于U型槽的两边,并形成一光轴,当被检测物体经过U型槽且阻断光轴时,光电开关就产生了开关量信号。
槽式光电开关比较适合检测高速运动的物体,并且它能分辨透明与半透明物体,使用安全可*。
⑤光纤式光电开关:它采用塑料或玻璃光纤传感器来引导光线,可以对距离远的被检测物体进行检测。
通常光纤传感器分为对射式和漫反射式。
它们的工作光线示意图如图3所示。
(2)术语解释常见的术语示意图如图4所示。
①检测距离:是指检测体按一定方式移动,当开关动作时测得的基准位置(光电开关的感应表面)到检测面的空间距离。
额定动作距离指接近开关动作距离的标称值。
②回差距离:动作距离与复位距离之间的绝对值。
③响应频率:在规定的1s的时间间隔内,允许光电开关动作循环的次数。
④输出状态:分常开和常闭。
当无检测物体时,常开型的光电开关所接通的负载由于光电开关内部的输出晶体管的截止而不工作,当检测到物体时,晶体管导通,负载得电工作。
⑤检测方式:根据光电开关在检测物体时发射器所发出的光线被折回到接收器的途径的不同,可分为漫反射式、镜反射式、对射式等。
红外电子产品使用指南说明书

Name: _______________________________ Date: ___________ Get’n Going - Recycled STEM robotsIntroductionThe RedBot is a great starting point for robotics. It is essentially an Arduino board with a motor controller.In this activity, you'll learn how to control the motion of the motors and build a frame and chassis for yourvery own robot out of recycled materials!Setup HardwareConnect the external battery pack to the RedBot Mainboard and thenconnect the motors. The motors have two wires (typically red andblack, but not always). Connect these to the RED or BLACK pins forthe LEFT MOTOR and the RIGHTMOTOR. Finally, connect the RedBotMainboard to your computer using a standard USB cable.Write CodeOpen up a web browser and go to c or use the regularArduino IDE to write this code. Copy the following 14 lines of code intoyour window - p ay careful attention to punctuation, spelling, andcapitalizations.After you have the code typed out, select the S parkFun RedBoard asthe board type and the appropriate port. Click the R un on Arduinobutton (CTRL+U) in either codebender or the Arduino IDE.If you have everything correct, the motors should spin for 2 seconds and then stop. If you want to see it run again, simply hit the RESET button on the R edBot Mainboard.Are the motors not running? Check the code for errors. Make sure you haven't missed a semi-colon, parentheses, or curly brace or check out the troubleshooting tips below:Troubleshooting TipsCheck code for syntax errors.The POWER must be set to ON.Make sure that the XBEE_HW_SERIAL switch is in the down position pointed toward XBEE SWSERIAL -- this is for advanced wireless control that we use later.Motors are, in fact, plugged into the correct ports.The MOTOR switch is set to RUN.Dissecting the codeNow that you have seen your code work, let's take a look at what's going on. The first line of code reads: This “includes” a reference library called RedBot.h that incorporates additional code into your program to provide access to new functions and commands. A reference guide to all of the objects and methods of the RedBot library can be found at: h ttps://sfe.io/r110After we've included the RedBot library, we can now use some of its o bjects and m ethods to control the RedBot. In the second line of code, we declare a o bject called . Theobject allows us to easily control the motors' speed and direction and the general movement of the RedBot. This is done with the following line:In Arduino, the function runs just once, so any instructions or commands you put inside it will also only run once. There, you’ll see two commands that we can use to control the speed of the robot:The command (also called a function) drives both the left and right motors in the correct direction so that the robot drives forward. The value in between the parentheses of a function is called an input parameter. For the function, the input parameter is the , and it can be any integer value from -255 to 255.The c ommand stops the motors abruptly. Notice that does not have an input parameter. You still need to have the parentheses (), though. This is what indicates that it is a function.Finally, you’ll see a command in between the two motors commands:As implied, this command delays the program flow for 2000 time units. In this case, the time unit is a millisecond. The Arduino microcontroller runs at 16 MHz,so if we didn’t add a delay, it would drive the motors and then immediately stop them in just a few microseconds!The is a blocking function that allows you to control the program flow.Play around with the codeNow that you got the motors to spin, let's check to make sure everything isspinning in the right direction. Orient the motors similar to the drawing.When you pair the motors together, the commandshould spin the right motor clockwise (CW) and the left motorcounter-clockwise (CCW).When you put wheels on the motors, this allows the robot to move forward.If one of the motors is spinning in the opposite direction, simply reverse thered and black wires on that motor. We suggest labelling the motors (R) and(L) so that you remember which motor goes where as you start buildingyour robot.Now, play around with the code. Try changing the speed of the motors. What is the slowest speed setting that you can use before the motors s tall? Do you notice anything peculiar? What happens when you use a negative number for the speed? W rite down your observations in your notebook.Engineering Notebook Observation Notes Sentence Starters"The slowest speed setting for my motors is…""When I set this speed, we observed that…""We then tried changing… because we thought...""When we used a negative number for the speed setting..."More Control!Want more control? If you want to drive the right motor and the left motor separately, you can use the or the functions. These methods also take a single input parameter for that can vary from -255 to +255.Characterize how these numbers relate to the motion and direction of the motors.Additional Questions:1.What does line 9 in the code example above, do? What happens if you take itout of the code? Why does this happen?2.The input parameter +255 in causes the robot to move forward. Explainthe direction that the right motor and the left motor spin to provide this result.3.Write a short code snippet to make the robot:move forward for 2 secondsstop for 1 secondmove backward for 1.5 secondsstop for 1 second4.What is the difference between code that you put in the setup() and code that you put in theloop() part in Arduino?Dumpster Diving ‐‐ Build your 'Bot!Now that you've gotten to spin the motors and you've seen how to control things in code, let's turn this into something that resembles a robot. There are a lot of robotics platforms that provide a pre-made chassis frame or building platform. Here, we encourage you to dig into your trash, clean out your recycling, and look at the potential for what these things can be. Cereal boxes? Plastic containers? Cardboard? These are all great frames for a robot!To get you started, we provided a rough template for a chassis laid out ontoa piece of cardboard. The robot works best as front-wheel drive design, andwe suggest using a skid caster for the back, but this is y our design.Use hot-glue, tape, zip-ties or whatever you can find to secure the motorsonto the chassis. Make sure you make room to mount the RedBot Mainboardand the battery pack, as well. When you're done with building your chassis,take a picture of it and/or make a sketch to include in your notebook!Robot Dance PartyLet's add some personality! Play around with controlling the motion of your new creation using the code examples you've learned. Can you figure out how to make the robot turn or spin in place? In order to turn, we need to control the motors separately. Recall that there are two commands to control the power of each wheel independently: andModify the code so that the RedBot drives straight, turns 90 degrees and then stops. Now, extend this to trace out an entire square!Find your favorite dance song and c horeograph a short little routine for your robot. Now film your robot dancing using V ideoStar (iPhone), V ideoFX (Android), V ine, or whatever your favorite video making program is. Share it to us (@SparkfunEDU) on Youtube, Vimeo, or your own site.Challenges \ Going FurtherPick a medium speed for your robot like: S etup your robot to drivestraight for 1 second and stop. Measure the distance it covers. Now, repeat this using 3 - 5different time durations. What relationship do you notice? Write down any qualitativeobservations as you conduct this experiment. What is your independent variable, dependentvariable, and controlled variables?Now, setup the robot to drive straight for 1 second and vary the speed. Write down anyqualitative observations as you conduct this experiment.Now that you know how to get the robot to drive, let’s investigate! How does therelate to “real” measurements of speed / velocity? takes a parameter from-255 to 255. Come up with a relationship (equation) between a nd the actualspeed of the robot.Engineers and scientists describe the speed of a motor in terms of revolutions per second. What input parameter value do you use with to get a speed of 1 revolution persecond?。
红外光电开关
关
时有几对发射器和接收器安装时,为了防止传感器彼此间的干扰,以接
收器安装在距发射器1.5m处为例,每两对(不同的发射器和接收器)之
间的距离要大于250mm(一般还应加上一个安全系数)
15
红 外 光 电 开 关
安装注意事项(对射式光电传感器)
Y:
红
发
外
射
光
器 发
电
出
开
的 光
关
斑 的
大
小
X:接收器距离发射器的距离
外
当同一侧的发射器和接收器安装距离较近时(50mm),由于检测物反射
光
电
的影响也会造成不同传感器间的干扰。如图3中,当1#和2#传感器间均有
开
被检测物时,1#传感器的被检测物反射的1#发射器的光线有可能传到2#
关
的接收器,导致2#传感器没有输出(检测不到物体);同样道理,2#传
感器的被检测物反射的2#发射器的光线有可能传到1#的接收器,导致1#
关
断时会产生一个开关信号的变化。光的通过时间是两倍的信号持续时间。
工作示意图
6
红 外 光 电 开 关
镜面反射式
红 检测距离:
外
光
0.1米----20米
电
开 关
特征:
(1)辨别不透明的物体; (2)借助反射镜部件,形成较远的有效距离; (4)不易受干扰,可以可靠合适的使用在野外或者有灰尘的环境中。
红
外
把1#和3#传感
光
电 器的发射器和接收
开 器分别向外倾斜一
关 个角度,这样2#传
感器的接收器就不
会接收到1#和3#发
射器被检测物反射
回来的光了,从而
红外对射使用说明书
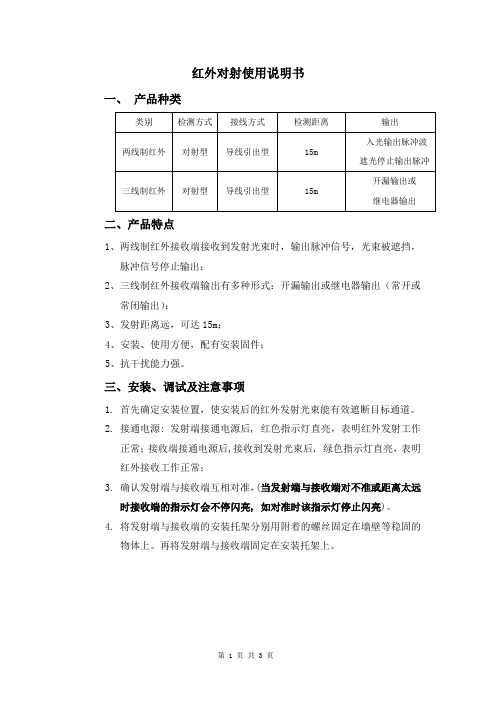
红外对射使用说明书一、产品种类二、产品特点1、两线制红外接收端接收到发射光束时,输出脉冲信号,光束被遮挡,脉冲信号停止输出;2、三线制红外接收端输出有多种形式:开漏输出或继电器输出(常开或常闭输出);3、发射距离远,可达15m;4、安装、使用方便,配有安装固件;5、抗干扰能力强。
三、安装、调试及注意事项1.首先确定安装位置,使安装后的红外发射光束能有效遮断目标通道。
2.接通电源: 发射端接通电源后, 红色指示灯直亮,表明红外发射工作正常;接收端接通电源后,接收到发射光束后, 绿色指示灯直亮,表明红外接收工作正常;3.确认发射端与接收端互相对准,(当发射端与接收端对不准或距离太远时接收端的指示灯会不停闪亮, 如对准时该指示灯停止闪亮)。
4.将发射端与接收端的安装托架分别用附着的螺丝固定在墙壁等稳固的物体上。
再将发射端与接收端固定在安装托架上。
红外发射红外接收5. 完成上述过程后, 可以模拟测试;遮断红外发射光束时, 接收端绿色指示灯熄灭,两线制红外停止输出脉冲波形,三线制红外输出状态改变。
6. 三线制红外接收可以根据实际需要调节反应灵敏度(调节灵敏度的拨动开关在三线制红外接收的主板上);灵敏度级别可在0至15之间调节,拨码开关全都在1234端时,灵敏度级别0为最高;当拨码开关全都都拨到“ON ”端时灵敏度级别15为最低;灵敏度是根据8421 BCD 码来调节的。
灵敏度级别对应的拨码图如下: 如图所示:7. 两线制红外由于是脉冲波形输出,因此主板必须配有相应电路(如下图);并在MCU 上做出相应的检测程序。
三线制红外输出状态由MCU 来控制和检测,可以根据不同的应用要求改变输出方式。
8、红外发射接线端子示意图:1、电源“-”2、电源“+”9、红外接收接线端子示意图:1、电源“-”2、电源“+”1、漏极输出1、常开(常闭)3、继电器公共端2、电源“-”3、电源“+”2、电源“-”4、电源“+”两线接收三线开漏输出接收继电器输出接收四、技术参数a. 电源电压: DC9V —30V 或AC8V —20V 。
红外遥控器和接收器用户手册说明书

iBIO-Remote MCE遥控器用于Windows Win7™家庭高级版专业版旗舰版ii1欢迎购买我们的产品感谢您选购红外遥控器和接收器,它们专供Win7™家庭高级版,Win7™专业版和Win7™旗舰版所用,通过红外遥控器和接收器您可以访问和管理多媒体电脑以及其他外围设备。
※重要提示:如果您的多媒体电脑已安装接收器,请跳过手册中与接收器相关的部分。
步骤一安装电池遥控器使用两个AAA 或AA 电池(包装附带电池)。
在使用过程中请及时更换电池,以免电池漏液对设备造成损坏。
1.1 将遥控器电池仓盖打开。
1.2 装入电池,注意电池正负极与遥控器正负极相对应。
1.3 盖上遥控器电池仓盖。
步骤二 定位接收器为了获取最佳的性能,请确保遥控器和接收器之间没有障碍物阻挡且距离不超过10米;此外,应该避免强光直接照射在接收器的红外传感器上。
如果您之前有购买过红外接收器,请参阅手册“使用遥控器”章节。
2步骤三 连接接收器开机前,请将接收器连接主板红外接头。
注意:当接收器连接主板红外接头后,请进入BIOS 设置确保板载红外端口功能已激活。
([Advanced]→[SuperIO Configuration]→[OnBoard CIR Port]↓现在您可以通过遥控器来体验多媒体中心的各种功能。
只需将遥控对准接收器,您便可以随意操作享受遥控带给您的舒适感受。
5种按钮:•导航按钮:屏幕上各种菜单之间的移动。
(例如:向上箭头或者输入)•播放按钮:控制多媒体。
(例如:暂停或者停止)•影音和电源按钮:更换频道,调节音量。
(例如:上一频道或者静音)•快捷按钮:方便用户快速访问多媒体中心的主要媒体。
•数字键按钮:输入字母数字字符或电视频道。
3选择遥控器上的导航按钮可以进行媒体中心各菜单之间的移动。
按钮功能图标START 启动媒体中心功能菜单UP 向上移动选项DOWN 向下移动选项LEFT 向左移动选项RIGHT 向右移动选项OK 确认选项BACK 返回上级菜单MORE 提供更多信息45媒体中心的播放按钮功能类似于家庭普通电子设备如CD 、DVD 播放器的播放按钮。
光电开关说明书

1PhotoelectricsRetro-reflective, Transistor Output Type PMR•Range: 10 m•Modulated, infrared light•Rated operational voltage: 10 to 40 VDC •Output: 200 mA, NPN or PNP•Make or break switching function (switch selectable)•Fully protected•LED-indication for target detected •High immunity to ambient light•25 x 65 x 81 mm reinforced PC housing, IP 67•Timer options (adjustable)Product DescriptionRetro-reflective photoelectric switch. Range up to 10 m.Fix ed sensitivity. High immu-nity to ambient light. Output function switch selectable.Protection degree IP 67.Screw terminal connection.25 x 65 x 81 mm polycarbo-nate housing. PG 13.5 or 1/2"NPT cable gland. Timer op-tions: Delay on operate, delay on release, one shot (triggered on leading or trailing edge).Type SelectionHousing Range Ordering no.Ordering no.Ordering no.Ordering no.W x H x DS nwithout timer without timer with timer with timer NPN PNP NPN PNP 25 x 65 x 81PG 13.5 cable gland 10 m PMR 10N G PMR 10P G PMR 10N GT PMR 10P GT 1/2" NPT cable gland10 mPMR 10N IPMR 10P IPMR 10N ITPMR 10P ITSpecificationsRated operating distance (S n )10 m (0 to 5,000 lux)With reflector type ER 4,ref. targetRated operational volt. (U B )10 to 40 VDC Ripple (U rpp )10%Output currentContinuous (I e )≤200 mA Short-time (I)200 mA,max. load capacity 100 nFNo load supply current ≤40 mA OFF-state current (I r )Max. 100 µA Voltage drop (U d )≤2.5 VDC Transient voltage IEC 947-5-2, level 3, 2.5 kV Dielectric voltage 2000 VAC rms (cont./supply)Sensitivity Fixed Light source GaAlAs, LED, 880 nm Light type Infrared, modulated Optical angle ±2°Light spot size 280 mm at 4 m Operating frequency 100 Hz Response time OFF-ON (t ON )≤4 ms ON-OFF (t OFF )≤6 msTime delay before avail. (t v )≤300 ms (typ. 100 ms)Output function Switch selectable, make or break switching IndicationTarget detected LED, yellow Optional timer Delay on operate 0.1 to 7 s ±2 s Delay on release 0.1 to 7 s ±2 s One shot 0.1 to 7 s ±2 sEnvironmentOvervoltage category III (IEC 664/664A; 947-1)Pollution degree 3 (IEC 664/664A; 947-1)Degree of protection IP 67 (IEC 529; 947-1)Temperature Operating -25°to +55°C (-13°to +131°F)Storage -30°to +80°C (-22°to +176°F)Vibration 10 to 150 Hz, 0.5 mm/7.5 g (IEC 68-2-6)Shock2 x 1 m & 100 x 0.5 m (IEC 68-2-32)Rated insulation voltage 50 VAC (rms)Electrical protectionShort-circuit, reverse polarity,overvoltage, transients2PMRSpecifications (cont.)Selection of FunctionSwitch 1 2 3PMR ... .PMR ... .T1 Break switching 9 One shot, leading edge - Break switching8 One shot, trailing edge - Make switching7 One shot, trailing edge - Break switching 5 Delay on release - Break switching 3 Delay on operate - Break switching 10One shot, leading edge - Make switching2 Make switching4 Delay on operate - Make switching 6 Delay on release - Make switching Don't careUpper postion ON (Mode 1)Lower position OFF (Mode 0)Housing material Body PC, grey Front PC, black CoverPC, blackCable glandPA, black, reinforced Mounting bracket Steel, blackConnection Screw terminal 5 x 2 x 1 mm 2Cable gland PG 13.5 or 1/2" NPT for cable 6 to 10 mm Weight90 gConnection DiagramTruth TableAccessoriesDelivery Contents•Photoelectric switch: PMR •Cable gland•Installation instruction •Mounting bracket•Packaging:Corrugated cardboard (environmentally friendly recycling material)•Reflectors: ER series•MB02 mounting bracket 90 mm long for mounting PMR from behind3PMROperation Diagramt = Time delaytv = Power ON delayDimensionsPMRPMR with angle bracketo r 1/2" N P TLED indication。
光电开关使用说明书

光电开关使用说明书1. 产品介绍光电开关是一种基于光电传感技术的装置,可通过光电感应实现物体的检测和控制。
本产品采用先进的光电技术和高品质材料制造而成,具有高精度、可靠性以及防水防尘的特点。
2. 安装步骤2.1 准备工作在安装光电开关之前,请检查以下事项:- 确保供电电压符合产品规定的电压要求;- 准备好所需的安装工具(如螺丝刀、扳手等);- 学习了解产品的操作手册和安装要求。
2.2 安装位置选择根据实际需要,选择合适的安装位置。
光电开关可以安装在墙壁、天花板或地面上,确保与被控对象的距离和视线畅通。
2.3 连接电源和设备根据产品说明书,正确连接光电开关的电源和被控设备。
请注意正负极的连接,确保电源稳定和可靠。
2.4 调整参数根据具体情况,通过光电开关上的参数调节旋钮,调整灵敏度和触发范围。
根据需要,您还可以调整工作方式(如常开或常闭)。
3. 使用方法3.1 启用光电开关在完成安装和调整后,请确保光电开关与电源连接正常,并保证供电稳定。
打开电源,光电开关将开始正常工作。
3.2 检测和触发根据您的具体需求,将待检测物体放置在光电开关的检测范围内。
当物体进入或离开检测范围时,光电开关将根据调整的参数进行触发,并输出相应的信号。
3.3 注意事项- 避免将光电开关安装在高温、潮湿或易受振动的环境中,以免影响产品的性能和寿命;- 定期检查和清洁光电开关,确保其表面干净,并清除可能影响传感器工作的灰尘或污垢;- 在使用过程中,如发现光电开关存在性能问题或异常情况,请立即停止使用,并联系售后服务中心进行检修或更换。
4. 维护和保养为了确保光电开关的正常工作和延长其使用寿命,请定期进行维护和保养:- 检查电源线和连接器是否牢固;- 清洁传感器和接收器的镜头,避免积灰和污垢的影响;- 定期校准光电开关的参数和灵敏度,以保证其工作精度。
请根据您的具体产品型号和使用情况,详细阅读产品说明书,并按照要求进行正确的安装、调整和使用。
红外对射产品安装使用说明书(2[1].2)
![红外对射产品安装使用说明书(2[1].2)](https://img.taocdn.com/s3/m/5ea8cc8333d4b14e85246874.png)
线型光束感烟火灾探测器JTY_HF_C33(普通、防爆型)产品安装使用说明书版本:2.0北京盛世长远科技有限公司2005年12月订货说明1 产品自签订购销合同后,供货周期为一个月。
2 本产品所报价格,不包括运费、运输保险,外地购货的用户可代办托运,费用由需方负担。
运输方式:中铁快运、铁路快件、航空运输等。
3产品分为三种信号输出型:1 x电流型、2 x开关量型、3 x电压型,用户在选用我公司产品时,应考虑配接厂家输入模块的报警及故障参数,以选用相应的输出型探测器。
4本产品保修期为二年。
5定购我公司产品的用户,当产品出现故障、损坏时,公司采取提前发货更换维修的方法。
并根据用户要求代办托运到指定地点。
6如需更多的资料、价格及供货方面的信息请与我公司联系。
目录一、概述 (4)二、特点 (4)三、工作原理与结构特征 (4)四、技术参数 (7)五、安装、布线与调试 (8)1. 安装探测器的环境条件 (8)2. 安装与布线 (9)3. 安装高度及位置说明 (10)4. 安装与调试 (11)六、使用及操作 (12)探测器基本功能的状态指示 (12)探测器灰尘自动补偿功能 (13)七、一般性故障的查询表 (13)八、维护 (13)九、备附件 (14)一、概述JTY-HF-C33型线型光束感烟火灾探测器(以下简称探测器),内置单片计算机,具备全面的分析判断能力,通过在探测器内部固化的运算程序,可自动完成对外界环境变化的补偿及火警﹑故障的判断,并通过指示声、光和信号输出线给出状态指示。
该探测器设有调试指示功能,调试方法简单、方便。
特别适用于无遮挡空间的高层建筑群,如各类商场、厅堂馆所、古建筑物、大型车间、仓库、隧道、及各种建筑的夹层、闷顶等,凡是在火灾形成前有烟雾出现的场所均可使用本产品。
二、特点➢ 接收器设有红、黄指示灯及音响指示,工程调试简便可靠;➢ 具有光照自动监测补偿功能,有强的抗日光干扰能力;➢ 具有故障自诊断功能;➢ 根据现场调试情况自动修正灵敏度,保证探测器的一致性;➢ 安装灵活,可安装在复杂建筑墙面或不平行墙壁;➢ 多种输出接口,与各厂家报警输入模块配套方便;➢ 具有远程积尘清理功能,使用者维护方便。
红外对射说明书
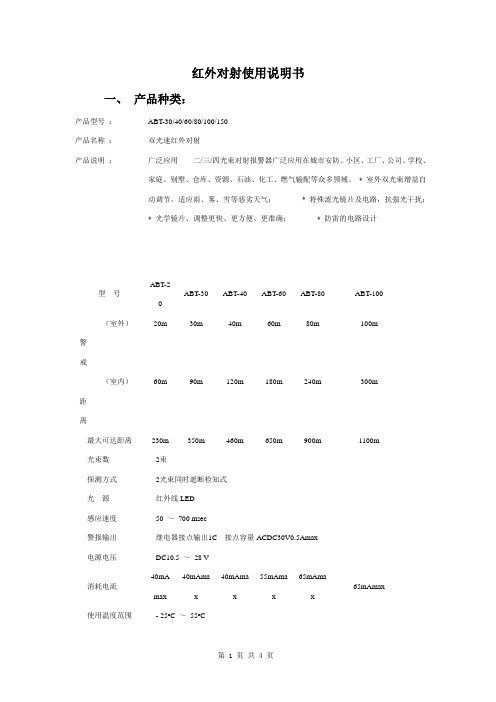
红外对射使用说明书一、产品种类:产品型号:ABT-30/40/60/80/100/150产品名称:双光速红外对射产品说明:广泛应用二/三/四光束对射报警器广泛应用在城市安防、小区、工厂、公司、学校、家庭、别墅、仓库、资源、石油、化工、燃气输配等众多领域。
* 室外双光束增益自动调节,适应雨、雾、雪等恶劣天气;* 特殊滤光镜片及电路,抗强光干扰;* 光学镜片、调整更快、更方便、更准确;* 防雷的电路设计型号ABT-2ABT-30 ABT-40 ABT-60 ABT-80 ABT-100警戒距离(室外)20m 30m 40m 60m 80m 100m (室内)60m 90m 120m 180m 240m 300m最大可达距离230m 350m 460m 650m 900m 1100m 光束数2束探测方式2光束同时遮断检知式光源红外线LED感应速度50 ~700 msec警报输出继电器接点输出1C接点容量ACDC30V0.5Amax电源电压DC10.5 ~28 V消耗电流40mAmax 40mAmax40mAmax55mAmax65mAmax65mAmax使用温度范围- 25o C ~55o C外型尺寸参照外型图防拆输出接点输出1b DC30V0. 5 Amax.光轴调整角度180o(±90o)水平光轴调整角度20o(±10o)垂直瞄准器可拆卸式结露、箱对策超声波机构其他附加机能受光指示、OK指示、测试端子材料ABS树脂重量300g(受光器+投光器各)二、产品特点1、两线制红外接收端接收到发射光束时,输出脉冲信号,光束被遮挡,脉冲信号停止输出;2、三线制红外接收端输出有多种形式:开漏输出或继电器输出(常开或常闭输出);3、发射距离远,可达200M;4、安装、使用方便,配有安装固件;5、抗干扰能力强。
三、安装、调试及注意事项1.首先确定安装位置,使安装后的红外发射光束能有效遮断目标通道。
红外对射使用说明书
红外对射使用说明书一、产品种类二、产品特点1、两线制红外接收端接收到发射光束时,输出脉冲信号,光束被遮挡,脉冲信号停止输出;2、三线制红外接收端输出有多种形式:开漏输出或继电器输出(常开或常闭输出);3、发射距离远,可达15m;4、安装、使用方便,配有安装固件;5、抗干扰能力强。
三、安装、调试及注意事项1.首先确定安装位置,使安装后的红外发射光束能有效遮断目标通道。
2.接通电源: 发射端接通电源后, 红色指示灯直亮,表明红外发射工作正常;接收端接通电源后,接收到发射光束后, 绿色指示灯直亮,表明红外接收工作正常;3.确认发射端与接收端互相对准,(当发射端与接收端对不准或距离太远时接收端的指示灯会不停闪亮, 如对准时该指示灯停止闪亮)。
4.将发射端与接收端的安装托架分别用附着的螺丝固定在墙壁等稳固的物体上。
再将发射端与接收端固定在安装托架上。
红外发射红外接收5. 完成上述过程后, 可以模拟测试;遮断红外发射光束时, 接收端绿色指示灯熄灭,两线制红外停止输出脉冲波形,三线制红外输出状态改变。
6. 三线制红外接收可以根据实际需要调节反应灵敏度(调节灵敏度的拨动开关在三线制红外接收的主板上);灵敏度级别可在0至15之间调节,拨码开关全都在1234端时,灵敏度级别0为最高;当拨码开关全都都拨到“ON ”端时灵敏度级别15为最低;灵敏度是根据8421 BCD 码来调节的。
灵敏度级别对应的拨码图如下: 如图所示:7. 两线制红外由于是脉冲波形输出,因此主板必须配有相应电路(如下图);并在MCU 上做出相应的检测程序。
三线制红外输出状态由MCU 来控制和检测,可以根据不同的应用要求改变输出方式。
8、红外发射接线端子示意图:1、电源“-”2、电源“+”9、红外接收接线端子示意图:1、电源“-”2、电源“+”1、漏极输出1、常开(常闭)3、继电器公共端2、电源“-”3、电源“+”2、电源“-”4、电源“+”两线接收三线开漏输出接收继电器输出接收四、技术参数a. 电源电压: DC9V —30V 或AC8V —20V 。
《红外光电开关》word版

工业级红外光电开关红外光电开关的工作原理红外线属于一种电磁射线,其特性等同于无线电或X射线。
人眼可见的光波是380nm-780nm,发射波长为780nm-1mm的长射线称为红外线,这里销售的红外线光电开关优先使用的是接近可见光波长的近红外线。
1.直接反射式光电开关直接反射光电开关是一种集发射器和接收器于一体的传感器,当有被检测物体经过时,将光电开关发射器发射的足够量的光线反射到接收器,于是光电开关就产生了开关信号。
当被检测物体的表面光亮或其反光率较高时,直接反射式的光电开关是首选的检测模式。
产品1:M18漫反射型光电开关(NPN三极管驱动输出)29元一个检测距离:100毫米被检测物最小直径:5毫米指向角度:小于5度工作电压:10~36V直流工作电流:小于10毫安输出驱动电流:300毫安温度范围:-25~70度这是一种应用最为广泛的光电开关,它的直径为18毫米,固定时只要在设备外壳上打一个18毫米的园孔就能轻松固定,长度约75毫米,背后有工作指示灯,当检测到物体时红色LED点亮,平时处于熄灭状态,非常直观,引线长度为100毫米。
2.反射板反射式光电开关反射板反射式光电开关亦是集发射器与接收器于一体,光电开关发射器发出的光线经过反射板,反射回接收器,当被检测物体经过且完全阻断光线时,光电开关就产生了检测开关信号。
产品2:反射板反射光电开关(继电器常开常闭接点输出)59.8元一套检测距离:4000毫米被检测物最小直径:5毫米指向角度:小于5度工作电压:24V直流工作电流:小于35毫安输出方式:继电器常开常闭接点触点容量:3A/250V温度范围:-25~70度反射板反射式光电开关集发射和接收一体化,使用和安装非常方便,精心设计的光路经过透镜聚焦配合特制的反射板反射,可以达到4米的检测距离,在很多场合可以替代红外对射,并且产品的灵敏度可以调节,并且采用继电器输出。
产品正面有红色LED指示,没有遮挡物体时处于熄灭状态,有遮挡物体时立即点亮,非常直观,引线长度为100毫米,其中棕色线是正24V,蓝线地线,白线是继电器触点的公共端,灰线是继电器触点的常闭,黑线是继电器触点的常开。
红外对射的说明书及安装
关键技术-智能温度补偿
理想的温度与灵敏度关系是一个非常复杂的数学关系, Selco大部分产品持续监测周围环境,精确地调整探测标准, 极大地提高了高温时的灵敏度,同时将误报警机率保持在 最小。
27
背景资料
➢ 所有的被动红外探测器由两个独立部分组成:
✓光学系统:光学系统的作用是将入侵者发出 的红外能量聚焦到热释电传感器上
圣威尔安防产品
深圳市圣威尔电子有限公司
1
内容
1. 公司介绍 2. 产品介绍:
Selco主动红外探测器 Selco被动红外探测器 Rosslare门禁系统、无线报警/通讯主 机
2
3
公司简介
公司发展大事记:
1996年 香港艾礼富股份有限公司设立深圳办事处 1998年 成立深圳艾礼富实业有限公司 2001年 成立深圳市圣威尔电子有限公司
40
通用控制器特点
✓ 可接进出两个读卡器或进门读卡器和出门按钮 ✓ 控制器可通过485总线方式互连,最多可联网64台 ✓ 多达500/2400/10K个用户 ✓ 三种工作模式:正常、安全、自由出入模式 ✓ 可使用专用软件或直接使用自带键盘设制控制器参数 ✓ 可设定节假日、每日开门时段,可打印多种考勤报表 ✓ 可连接任何一款Wiegand26格式的读卡器 ✓ 两个三色LED灯指示控制器状态 ✓ 具有按键开门功能 ✓ 内置门铃、充电器 ✓ 使用简便
✓ 中文LCD背光显示
✓ 可设8分区,接受40个RF设备 ✓ 可设6个电话号,2个中心平台号 ✓ 编程方式简单 ✓ 录音功能,可接听报警语音信息 ✓ 存128条报警信息,掉电不丢失 ✓ 多种信息提示 ✓ 支持多种报警协议 ✓ 配Ibutton钮扣,方便小孩或老人
33
具有导向作用的操作界面
红外对射型光电传感器YT603B1

红外对射型光电传感器YT603B1红外对射型光电传感器 YT603B1⼀、⼯作原理开关由电源电路,发射电路和接收电路组成。
红外发射管将通过镜⽚聚集后的⼀束调制光平⾏发射出去,被红外光敏三极管接收,通过放⼤,延时后再使继电器吸合,“动作”指⽰灯亮,当检测物离开,继电器即释放,“动作”批⽰灯熄灭。
从⽽来达到物体的⾃动检测控制。
⼆.概述由YT502B1和603B1组成的红外光电开关,以调制红外光为光源,采⽤对射式检测⽅式,主要器件采⽤进⼝元件,传感器和放⼤器为⼀体,连线使⽤接插件形式,具有体积⼩,使⽤寿命长,抗⼲扰能⼒强,⼯作性能稳定,安装维修⽅便等优点。
三、主要技术参数1、⼯作电压:AC220V50-60HZ2、检测距离:10-300cm可调;出⼚整定150cm3、延时动作时间:0.2-8秒可调;出⼚整定3秒4、作⽤环境:0~45℃温度≤85%5、⼯作⽅式:对射,延时吸合,连续⼯作6、允许背景照度:⽩炽灯≤1×100000L×太阳光≤5×100000L×7、功耗:≤3VA8、输出触点容量:AC220V6A四、接线说明1号(黄线)2号(黄线)⼀交流200电源输⼊3号(红线)5号(⿊线)⼀常开触点输出4号(兰线)5号(⿊线)⼀常闭触点输出注意:!开关中线路板下半部分带有交流220V电压,因此⾮专业调试或维修⼈员在通电情况下不得打开合盖。
五、安装与调整开关安装于棉箱观察窗⼝外,检测⼝的垂直位置既是需要控制棉层⾼度的位置,先将YT603B1安装固定好后,将五芯插头线插⼊五芯插座,三芯插头线插⼊三芯插座(YT5021B)。
将五芯线按照接线图或接线⾊标接⼊相应的电器回路和电源,接通电源,将TY502B1与YT603B1同⼀⽔平轴的对⽅对准使YT603B1的对光指⽰灯亮起说明光轴已对准并加以固定。
开关的延时,灵敏度(即控制距离)的调整,需打开YT603B1盒盖后⽅可进⾏调整,内有灵敏度和延调节电位器,但产品出⼚时均已整定好,⼀般情况下⽤户不需要调节。
光电开关专用名词说明及使用说明

光电开关专用名词说明及使用说明光电开关英文叫:Photoelectric switch1 概述光电开关是传感器大家族中的成员,它把发射端和接收端之间光的强弱变化转化为电流的变化以达到探测的目的。
由于光电开关输出回路和输入回路是电隔离的(即电缘绝),所以它可以在许多场合得到应用。
采用集成电路技术和SMT表面安装工艺而制造的新一代光电开关器件,具有延时、展宽、外同步、抗相互干扰、可靠性高、工作区域稳定和自诊断等智能化功能。
这种新颖的光电开关是一种采用脉冲调制的主动式光电探测系统型电子开关,它所使用的冷光源有红外光、红色光、绿色光和蓝色光等,可非接触,无损伤地迅速和控制各种固体、液体、透明体、黑体、柔软体和烟雾等物质的状态和动作。
接触式行程开关存在响应速度低、精度差、接触检测容易损坏被检测物及寿命短等缺点,而晶体管接近开关的作用距离短,不能直接检测非金属材料。
但是,新型光电开关则克服了它们的上述缺点,而且体积小、功能多、寿命长、精度高、响应速度快、检测距离远以及抗光、电、磁干扰能力强。
目前,这种新型的光电开关已被用作物位检测、液位控制、产品计数、宽度判别、速度检测、定长剪切、孔洞识别、信号延时、自动门传感、色标检出、冲床和剪切机以及安全防护等诸多领域。
此外,利用红外线的隐蔽性,还可在银行、仓库、商店、办公室以及其它需要的场合作为防盗警戒之用。
2专用名词说明2.1 检出距离对射式和镜面反射式光电开关的检出距离是指光轴上无有效遮挡物野战,可稳定检出的最大距离。
反射式光电开关的检出距离则是可稳定检出标准检测物的最大距离。
2.2 回差距离回差距离指动作距离与复位距离之差。
它用检出距离的比率来表示,一般在检出距离的20%以下。
2.3 响应时间把从受光器初始有效受光到输出动作所需的时间称作响应时间。
把从受光器初始有效遮光到输出复位所需的时间称为复位应用时间。
2.4 暗动暗动(DARK ON):即遮光动作。
它表示在进入受光器的光速减少到一定程序时或被全遮时,输出晶体管将导通输出。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
YT603B1红外对射光电开关说明书产品图片Photo尺寸图Dimension drawing
检测形式X:漫反射
T:0.7(M) 测距可调节
型号YT603B1
额定工作电压(纹波峰值
<=15%)[V]DC10 (36V)
AC
输出信号NPN 常开工作电流表晶体管/可控硅/继电[mA]200mA
响应时间[ms]<3
指向角3°...20°电压降晶体管/可控硅/继电器<1.5V
消耗电流[ms]<=20
差动距离<15%
极性保护▲短路保护■▲■
动作指示
工作环境照度LUX 白炽灯(受光面照度)<=3000太阳光(受光面照度)<=10000
工作环境温度-25...+55[℃]
外壳材料黄铜镀铬
连接方式Y:引线J:内接线C:插件Y C
防护等级IP67
符合标准GB/T14048.10
电气接线图备注:外形尺寸可按用户要
求生产。