瑞萨版双环PID
PID调节器使用经验

PID调节器使用经验调整器在自动化过程掌握中使用很广泛,电工学习网我总结了PID 调整器使用阅历与大家共享,共同提高调整器应用水平。
1、以被控对象特性选择掌握器要获得良好掌握效果,首先要正确选用PID调整器,PID调整器选型相对简单,对于有阅历的用户大多是根据自己的实践阅历来确定PID 调整器。
目前国内可供用户选用的PID调整器品牌和种类许多,高端PID调整器以“欧陆”品牌居首位,国产调整器“宇电”品牌市场占有率最高,但各行业应用对象的特性不相同,使用单位均需要依据按被控对象的特性来选用PID调整器。
(1)常规工艺参数掌握通常选用单回路PID调整器。
单回路调整器有一路信号输入,掌握设定及参数修改通过仪表参数设定完成。
(2)正反转掌握的电动执行机构选用的带伺服放大器阀位掌握调整器。
带伺服放大器阀位掌握调整器输入信号为两路(测量值和阀位反馈值),仪表将单回路PID调整器和伺服放大器功能融合在一起。
(3)假如被控对象需要不同时段以不同掌握指标进行过程掌握,应选用程序掌握调整器。
程序掌握调整器可以按时间分段设置不同的掌握目标值和PID参数,轻松实现工艺掌握要求。
(4)串级掌握通常由一台单回路PID调整器和一台外给定调整器构成,也可以选用一台可编程序调整器。
可编程序调整器功能强大,便于实现温度、压力、流量、液位PH、酸度、浑浊度等掌握项目的串级、选择、批量、交叉、比值、数学运算等简单的连续过程掌握,价格也略高。
(5)温控仪也是一种PID调整器,特殊是生产过程中要求对温度根据工艺曲线变化、超调小或无超调、控温稳定性好的场合,对温控仪的掌握效果就有些苛刻!在PID参数整定合理、掌握方案不存在问题状况下,不同厂家固化在PID调整器芯片内的掌握算法程序不同,不同品牌温控仪的温度掌握效果也就存在很大差别,所以再此特殊提示:不是全部名称为“温控仪”的仪表都能将温度掌握到你所期望到达的水平,选择需谨慎。
(6)全部数字调整器均P、I、D功能,但并不是全部工况都同时用到这三个功能,PID功能的选用参见下表:被掌握的变量PID调整器选择温度PID(同时使用比列、积分和微分)压力PI(使用比列、积分,不用微分)流量PI(使用比列、积分,不用微分)液位PI(使用比列、积分,不用微分)成分PID(同时使用比列、积分和微分)2、正确选择PID调整器正反作用数字调整器的正反作用是用软件通过参数设定来选择。
常见的PID图例缩写符号
LINE SERVICE IDENTIFICATION SYMBOL SERVICE符号帮手AIR SYSTEMS空气系统IA INSTRUMENT AIR仪表风PA PLANT AIR工厂风DA 烧焦空气STEAM AND CONDENSATE SYSTEMS 蒸汽和凝液系统HC HIGH PRESSURE CONDENSATE高压蒸汽凝液MC MEDIUM PRESSURE CONDENSATE中压蒸汽凝液LC LOW PRESSURE CONDENSATE高压蒸汽凝液SC SURFACE CONDENSATE概况凝液DS DILUTION STEAM稀释蒸汽HS HIGH PRESSURE STEAM高压蒸汽MS MEDIUM PRESSURE STEAM中压蒸汽LS SUPERHEATED LOW PRESSURE STEAM过热高压蒸汽PS SATURATED LOW PRESSURE STEAM饱和高压蒸汽SHS SUPER HIGH PRESSURE STEAM超高压蒸汽DRAIN SYSTEMS排放系统CD CHEMICAL DRAIN化污LD LIQUID DRAIN液体排放ND NON-CONTAMINATED POLLUTION DRAIN无污染排放OD OILY DRAIN油污EXHAUST AND VENT SYSTEMSAV ATMOSPHERIC VENT (NOT FROM PSV)通年夜气(不从平安阀)SV SAFETY VALVE TO ATMOSPHERE平安伐排年夜气FLARE SYSTEMS火炬系统DF DRY FLARE干火炬WF WET FLARE湿火炬GAS SYSTEMS气体系统FG FUEL GAS燃料气HG HYDROGEN氢气NG NITROGEN氮气SPECIAL LIQUID SYSTEMS 特殊液体系统CL CAUSTIC腐蚀性QO QUENCH OIL急冷油SO SEAL OIL密封油WO WASHING OIL冲刷油(压缩机)PROCESS SERVICE (NORMAL) P PROCESS工艺REFRIGERANT SYSTEMSBR BINARY REFRIGERANT二元制冷PR PROPYLENE REFRIGERANT丙烯冷剂WATER SYSTEMS水系统BFW BOILER FEED WATER锅炉给水FW FIRE WATER消防水IW INTERMEDIATE WATER二次水CWR COOLING WATER RETURN冷却水回水CWS COOLING WATER SUPPLY冷却水PW POLISHED WATER工艺水QW QUENCH WATER急冷水UW UTILITY WATER工业水WW WASTE WATER废水MISCELLANEOUS ABBREVIATION AND SERVICE SYMBOLS 各种缩写和符号A AIR MOTOR空气马达ACC ACCESSIBLE可接近的ATM ATMOSPHERE年夜气BL BATTERY LIMIT界区BTS BUBBLE TIGHT SHUT-OFF缓慢紧密切断BV BY VENDOR由供应商提供CONN CONNECTION连接CSC CAR SEAL CLOSED关闭锁定CSO CAR SEAL OPEN翻开锁定DEC DETAIL ENGINEERING CONTRACTOR工程承包商详细资料EOR END OF RUN运行结束SOREW EYEWASH洗眼FLG FLANGE法兰LC LOCKED CLOSED锁定关闭LO LOCKED OPEN锁定翻开NC NORMALLY CLOSED正常情况下关闭NNF NORMALLY NO FLOW正常情况下无流量NO NORMALLY OPEN正常情况下翻开S SAMPLE CONNECTION取样点SC SAMPLE CONNECTION WITH COOLER连接冷却器的取样点SOR START OF RUN开始运行SR STRAINER过滤器SS SAFETY SHOWER平安喷淋T LINE DRIP TRAP疏水器TSO TIGHT SHUT OFF密闭切断UC UTILITY CONNECTION公用工程接口LINESMAIN LINE主线SECONDARY LINE副线UNDERGROUND OR BURY地下或隐藏ELECTRICALLY TRACED电缆线SPECIAL TRACED特殊管线STEAM TRACED蒸汽伴热JACKETED夹套PACKAGED EQUIP BOUNDARY成套设备分界线BATTERY LIMIT BOUNDARY界区分界线FUTURE未来MATERIAL SPEC BREAK资料规格分界点DESIGN BREAK设计分界点BELOW GROUND LINE RISING ABOVE GRADE地管伸出点BREAK OF REPONSIBILITY责任分界点MISCELLANEOUS ITEMS各种细节ROD OUT CONNECTIONCLEAN OUT CONNECTION(FLUSHING)清理接口(冲刷)REMOVABLE SPOOL可裁撤短管NOZZLE OR PIPE WITH BLIND FLANGE 带盲法兰的喷嘴或管线SPACER FOR BLIND盲管位置NORMALLY CLOSED正常情况下关闭NORMALLY OPEN正常情况下翻开FIGURE BB 图REVERSIBLE BLIND8字盲板ORIFICE SWAGE孔板INSULATED FLANGED JOINT保温法兰连接PIPE CAP (WELDED)管帽(焊接)PIPE CAP (SCREWED)管帽(法兰)REDUCER变径管T-STRAINERT型过滤器PERMANENT Y-STRAINER (WITH VALVE)带阀门Y型过滤器TEMPORARY STRAINER临时过滤器HOSE CONNECTION软管接口SAMPLE CONNECTION取样口**-SERVICE SYMBOL符号说明SEQUENCE NUMBER序列号OPEN DRAIN HUB敞口集液器MATERIAL BALANCESTREAM NUMBER物流号CONTINUTY ARROW延续箭头INITIAL FEED初始进料GRADE品级TRENCH地沟LINE IDENTIFICATION管线说明INSULATION CODE保温代码MATERIAL SPECIFICATION材质BRANCH IDENTIFIER分支标识SEQUENCE NUMBER管线号PROCESS SECTION AREA(MAY BE SINGLE DIGIT)工艺区LINE SERVICE SYMBOL管线符号说明LINE SIZE管线尺寸VALVESGATE VALVE闸阀BUTTERFLY VALVE蝶阀DIAPHRAGM VALVE隔膜阀GLOBE VALVE球阀NEEDLE VALVE针型阀PLUG VALVE截止阀BALL VALVE球阀CHECK VALVE止逆阀STOP CHECK VALVE(BOILER NON-RETURN VALVE)带手轮止逆阀THREE 0R FOUR VALVE三通或四通阀MULTI PORT PLUG多向切断阀ANGLE VALVE角阀DUAL TANDEM BLOWNDOWN VALVES两段排污阀RAN TYPE VALVER型阀T-TYPE GLOBE VALVET型球阀AUTOMATIC RECIRCULATION VALVE自动再循环阀INTERLOCKED VALVES(MECHANICAL LINK))机械联动阀QUICK OPENING OR CLOSING VALVE快速开关阀VALVE WITH BODY CAVITY RELIEF OR BODY BLEED CONNECTION带有排放阀的阀门DAMPER挡板APPROPRIATE ABBREVIATION合适的缩写SLIDE GATE VALVE滑动闸阀EQUIPMENT IDENTIFACATION设备符号SUPPLIED WITH VENDOR EQUIPMENT供应商提供的设备SPARE(A,B,C,ETC USED IF PARALLEL UNITS)同一设备的编号SEQUENCE NUMBER序列号AREA NUMBER区号EQUIPMENT CODE OF ACCOUNT设备代码UNIT DESIGNATION单位名称E–ETHYLENE乙烯H-DPG HYDROGENATION汽油加氢U-UTILITY & OFF SITE公用工程PIPING SPECIALTY ITEMS ANDMISCELLANEOUS EQUIPMENT特殊管项和各种设备ALL PIPING SPECIALTY ITEMS ARE IDENTIFIED所有特殊管线有以下注明SEQUENCE NUMBER ( NUMBERED IN SAME WAY AS INSTRUMENT )序列号(与仪表排序相同)EXHAUST HEAD负呀总管ATOMPHERIC VENT WITH WEATHER CAP防雨放空管DUPLEX STRAINER相同的过滤器PERMANENT BASKET STRAINER提篮式过滤器FLEXIBLE HOSE金属软管EXPANSION JOINT膨胀节INLINE MIXERS OR VENTURI TYPE DESUPER HEATER 内嵌式混合器或文丘里型混合器SILENCER消音器EJECTOR OR EDUCTOR喷射器FILTER过滤器FILTER WITH HOOD带罩过滤器CONDENSATE TRAP (NON-PROCESS)凝液疏水器FIRE PROTECTION消防FIRE HYDRANT消防炮FIRE HYDRANT WITH MONITOR带监视器的消防栓FIRE HYDRANT WITH PUPPER CONNECTION消防栓HOSE HOUSE消防箱VALVE WITH INDICATOR POST 带指示的阀MONITOR监视器EM IF ELEVATEDPUMP泵CENTRIFUGAL离心泵METERING OR RECIPROCATING 计量泵或往复式泵ROTARY {GEAR ,SCREW }齿轮泵VERTICAL SUMP PUMP立式污水泵VERTICAL CANNEDPUMP (PFD ONLY ALL TYPES)泵LIQUID RING VACUUM PUMP 水环式真空泵COMPRESSOR压缩机SINGLE STAGE RECIPROCATING MULTI-STAGE RECIPROCATING CENTRIFUGAL离心式ROTARY旋转式BLOWER FAN鼓风机BLOWER (PFD ONLY ALL TYPES)鼓风机COMPRESSOR (PFD ONLY)压缩机SCREW螺杆式DRIVER驱动装置ELECTRIC MOTOR电动马达DIESEL ENGINE .ETC柴油发念头APPROPRIATE ABBREVIATION相应的缩写A AIR空气D DIESEL柴油H HYDRAULIC水力的M ELECTRIC电气的STEAM TURBINE蒸汽涡轮EXPANDER扩年夜室HEAT EXCHANGER换热器SHELL AND TUBE HEAT EXCHANGER管壳式换热器HORIZONTAL SHELL AND TUBE HEAT EXCHANGER 水平式管壳式换热器VERTICAL SHELL AND TUBE HEAT EXCHANGER 垂直式管壳式换热器SINGEL SECTION DOUBLE PIPE EXCHANGER TWO SECTION DOUBLE PIPE EXCHANGERAIR COOLER空冷器AIR COOLER (PFD ONLY)空冷器KETTLE TYPE REBOILER OR STEAM GENERATOR KETTLE TYPE EXCHANGER (PFD ONLY) GRAPHITE BLOCK TYPE EXCHANGERPLATE EXCHANGERDRAWING IDENTIFICATION图形说明REVISION NO.修订号DRAWING NO.图号AREA NO.区号JOB NO.工号DRAWING SIZEVESSELS AND FURNACES容器和炉子FLOATING ROOF TANK浮顶罐CONE ROOF TANK WITH INTERNAL COIL带内盘管锥型顶罐COLUMN柱型PACKINGINTERNAL BAFFLEVORTEX BREAKER旋风分离器CABIN TYPE HEATER WITH EXTERNAL CROSS-OVERS HORIZONAL TYPE HEATER WITH INTERNAL CROSSOVERS 内部有交叉的水平加热管VESSEL ELEVATIONS离空中高度INSULATION CODE保温代码D ANTI-SWEAT INSULATION防水保温E ELECTRICAL TRACINGF FULL HEAT CONSERVATIONH NORMAL HEAT CONSERVATION一般保温M DUAL SERVICE INSULATIONP PERSONNEL PROTECTION防护人员S SPECIAL特殊的T STEAM TRACINGV ACOUSTICAL听力的BREAK OF RESPONSIBILITYSYMBOL FOR LOCATION OF TIE-IN POINT CONNECTEDU NEW ETHYLENE STORAGE AREA乙烯新区的V OSBL (ON NORTH SIDE RACK)W OSBL (ON MAIN RACK IN FRONT OF NEW HEATER)X OSBL (ON SOUTH SIDE RACK)Y OSBL (COOLING WATER)E EXISTING AREAD DPG AREAC4 C4 HYDRO AREAD(W) DPG AREA AND THROUGH THE TIE-IN POINT(W) ONTHE RACKC4(U) C4 HYDRO AREA AND THROUGH THE TIE-IN POINT(U) ON THE RACKE(W) EXISTING AREA AND THROUGH TIE-IN POINT(W) ON THE RACKE(X) EXISTING AREA AND THROUGH TIE-IN POINT(X) ON THE RACKGENERAL NOTES1. FOR INSTRUMENTATION SYMBOLS SEEDWG NO.0005B仪表符号参阅图DWG NO.0005B2.FLOW DIAGRAMS ARE DIAGRAMATIC ONLY .ROUTINGOF PIPELINES MUST BE INVESTIGATED FOR VENTING。
OMEGA CN3390系列多环PID温度 过程控制器说明书

ߜ10 PID Control Loops with Auto-Tuning ߜJ, K, T, E, R or S Thermocouple, RTD and 4 to 20 mA Current Input TypesSelectable for Each Loopߜ 2 Alarm Setpoints Per LoopߜOptical Isolation for ElectricallyNoisy EnvironmentsProgram 28145679103Probes sold separately.KQSS-316G-12, $25 eachSee Section AߜRelay, Triac, 4 to 20 mA andac SSR Output CapabilityߜOptional RS-232, RS-422 andRS-485 Digital CommunicationsߜCoded Security Levels to PreventUnauthorized Access to ProgrammingߜModular Construction Allows FieldInstallation of Output, Alarm, andCommunications OptionsCN3390 Series$2480Basic UnitMulti-Loop PID Temperature/Process Controllers CN3390 SeriesACCEPTS10 INPUTS!P-129P-130Takes the Place of Ten ControllersThe OMEGA ®CN3390 ON/OFF, proportional, PID Multi-Loop Temperature/Process Controller,measuring only 95 mm (3.75") deep, features the inputs,outputs, programmable features and sophisticated control techniques typically found only in much larger controllers. The CN3390 requires only 30% of the mounting space required for 10 individual controllers. All hardwiring is done once on high quality plug-on terminal strips, so the unit can easily be installed or taken out of service.The CN3390, with its optical isolation of inputs, outputs and optional digital communications, is built to handle most real-world factory conditionswithout special filtering equipment, such as snubbers,isolated power supplies or noise suppressors.Digital Signal Processing (DSP) sets the CN3390controller apart from other multi-loop controllers. DSP maintains the integrity of the sensor input signals, resulting in more stable control. Over-sampling of inputs (92 times per second per input) and an input update rate of 0.5 seconds per loop ensure that theCN3390 responds quickly to process changes.Through simple programming selections, you can adjust the controller displays to establish the range and engineering units of indication for the current input.The CN3390 provides two alarm setpoints per loop (20 total), and an alarm LED for each loop. Any of these 20setpoints can be connected to the common alarm output or one of ten optional alarm outputs. The common alarm output can be turned off fromeither the front panel alarm acknowledge pushbutton or from a remote pushbutton.The CN3390 alarm setpoints can be mapped to an optional internal alarm board. The alarm board’s digital alarm outputs or the common alarm can be connected to a remote single relay alarm module or an external 10-relay alarm output board.All control selections and programmed information are selectable from the front panel pushbuttons. Straightforward cues and high resolution LED’s send clear messages regarding the operation,set-up and programming of the controller. The autoscan feature scrolls through each loop, displaying process temperature, setpoint and loop number.Optional RS-232C, RS-422A and RS-485 digital communications are available for all 10 loops. Using RS-422A or RS-485, you can address up to 255 controllers.CN3390 offers flexible mounting: remote mounting,panel door mounting, or basic sub-panel mounting. The front panel display plugs directly into the controller chassis so it can be mounted remotely or simply removed to prohibit tampering or unauthorizedprogramming. Remote connection cables are available in 450 mm (18"), 1.5 m (5') and 4.5 m (15') lengths.CN3390 shown with remote mounting cableP-131SpecificationsControl Modes (Field Selectable)Automatic:ON/OFF,proportional, proportional with automatic reset/integral and/or rate/derivative (PID, PI, PD)Manual:Bumpless, balanceless transfer with proportional control;disintegration time = 1 to 100 sec Control Adjustments (Field Selectable)Control Setpoint:Instrument sensor range (°F, °C, %)Setpoint Limits:Instrument sensor range Deadband:0.01 to 25.00%Proportional Band:0.1 to 999.9% of span Automatic Reset:0.00 to 99.99repeats/minute Rate:0 to 1000 secondsOutput Cycle Time:0.1 to 60.0 secondsOutput Limit:0 to 100% ON Control Outputs (Plug-In):Total 5outputs modules, 2 control loops per output module Relay:N.O., rated 1.0 A @120Vac or 0.5 A @ 230 VAc (resistive load)1 A SSR: 1 A continuous, 10 A in-rush current at 120 or 230 Vac (resistive load)Current/Voltage:Non-isolated:4to 20 mA into 0 to 800 Ωload;isolated: 4 to 20 mA into 0 to 400Ωload with 24 V power supply SSR Pulse:transistor output of 20Vdc nominal at 40 mAAlarm Outputs: 2 field assignable alarm setpoints per loop, each can be mapped to any one of 10 alarm outputs or the common alarmoutput; 1 common latching alarm output, current limited, emitterfollower transistor; optional 10 open collector transistor outputs,sink 40mAdc at 50VdcAlarm Modes:High and low, range 100% of span, non-latching; ±deviation, sensor span above/below control setpointReset Differential: 0 to 25%instrument sensor range, 0.01incrementsAlarm Relay Board (Optional):10 relays, rated 10 A @ 120 V, form C contacts; includes 24 Vdc power supply (unregulated) to power relay coils; requires 120 Vac or 240 Vac inputInput Update Rate: 2 updates per second (92 samples per second)CN3390 Multi-Loop PIDTemperature/Process ControllersP-132two relays, one 1 A SSR, one 4-20 mA isolated and one 20 Vdc pulse control outputs, with optional digital communications, $2480 + 85 + 370 = $2935Ordering Example: CN3390-R , ten loop controller with ten relay outputs = $2480OCW-1 OMEGACARE SM extends standard 1-year warranty to a total of 2 years ($150), $2480 + 150 = $2630Open Sensor andOut-Of-Range Conditions:Programmable for 0-100% output Digital Communications Option: RS-232C single drop, isolated;RS-422A, RS-485 multi-drop, isolated; baud rate 300, 600, 1200, 2400, 4800, 9600, 19,200; data string ASCII,asynchronous, one start, one parity, seven data and one stop bit or binary Instrument Power:120 or 230 Vac(+10%, -15%), 50 to 60 Hz, 7 VA nominal power consumptionOperating Environment:0 to 55°C (30 to 130°F) ambient temperature with relative humidity less than 95% non-condensing Dimensions:318 W x 292 D x 95 mm L (12.5 x 11.5 x 3.75")Weight: 10 lb (4.5 kg)†3390A-RS is equivalent to -2optionOMEGACARE SM extended warranty program is available for models shown on this page. Ask your sales representative for full details when placing an order.CANADA www.omega.ca Laval(Quebec) 1-800-TC-OMEGA UNITED KINGDOM www. Manchester, England0800-488-488GERMANY www.omega.deDeckenpfronn, Germany************FRANCE www.omega.frGuyancourt, France088-466-342BENELUX www.omega.nl Amstelveen, NL 0800-099-33-44UNITED STATES 1-800-TC-OMEGA Stamford, CT.CZECH REPUBLIC www.omegaeng.cz Karviná, Czech Republic596-311-899TemperatureCalibrators, Connectors, General Test and MeasurementInstruments, Glass Bulb Thermometers, Handheld Instruments for Temperature Measurement, Ice Point References,Indicating Labels, Crayons, Cements and Lacquers, Infrared Temperature Measurement Instruments, Recorders Relative Humidity Measurement Instruments, RTD Probes, Elements and Assemblies, Temperature & Process Meters, Timers and Counters, Temperature and Process Controllers and Power Switching Devices, Thermistor Elements, Probes andAssemblies,Thermocouples Thermowells and Head and Well Assemblies, Transmitters, WirePressure, Strain and ForceDisplacement Transducers, Dynamic Measurement Force Sensors, Instrumentation for Pressure and Strain Measurements, Load Cells, Pressure Gauges, PressureReference Section, Pressure Switches, Pressure Transducers, Proximity Transducers, Regulators,Strain Gages, Torque Transducers, ValvespH and ConductivityConductivity Instrumentation, Dissolved OxygenInstrumentation, Environmental Instrumentation, pH Electrodes and Instruments, Water and Soil Analysis InstrumentationHeatersBand Heaters, Cartridge Heaters, Circulation Heaters, Comfort Heaters, Controllers, Meters and SwitchingDevices, Flexible Heaters, General Test and Measurement Instruments, Heater Hook-up Wire, Heating Cable Systems, Immersion Heaters, Process Air and Duct, Heaters, Radiant Heaters, Strip Heaters, Tubular HeatersFlow and LevelAir Velocity Indicators, Doppler Flowmeters, LevelMeasurement, Magnetic Flowmeters, Mass Flowmeters,Pitot Tubes, Pumps, Rotameters, Turbine and Paddle Wheel Flowmeters, Ultrasonic Flowmeters, Valves, Variable Area Flowmeters, Vortex Shedding FlowmetersData AcquisitionAuto-Dialers and Alarm Monitoring Systems, Communication Products and Converters, Data Acquisition and Analysis Software, Data LoggersPlug-in Cards, Signal Conditioners, USB, RS232, RS485 and Parallel Port Data Acquisition Systems, Wireless Transmitters and Receivers。
S7-200SMART中PID使用调试方法和步骤
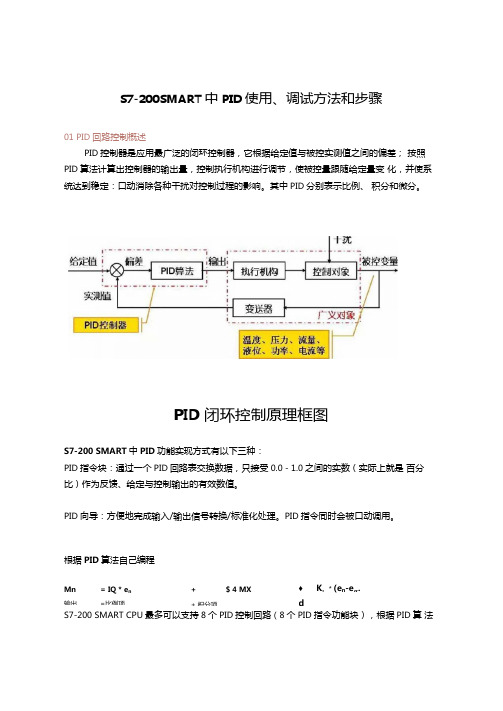
S7-200SMART 中PID 使用、调试方法和步骤01 PID 回路控制概述PID 控制器是应用最广泛的闭环控制器,它根据给定值与被控实测值之间的偏差; 按照PID 算法计算出控制器的输出量,控制执行机构进行调节,使被控量跟随给定量变 化,并使系统达到稳定:口动消除各种干扰对控制过程的影响。
其中PID 分别表示比例、 积分和微分。
PID 闭环控制原理框图S7-200 SMART 中PID 功能实现方式有以下三种:PID 指令块:通过一个PID 回路表交换数据,只接受0.0 - 1.0之间的实数(实际上就是 百分比)作为反馈、给定与控制输出的有效数值。
PID 向导:方便地完成输入/输出信号转换/标准化处理。
PID 指令同时会被口动调用。
根据PID 算法自己编程S7-200 SMART CPU 最多可以支持8个PID 控制回路(8个PID 指令功能块),根据PID 算 法Mn= IQ * e n输出=比例项+$ 4 MX + 枳分项♦ K 。
* (e n -e….d口己编程没有具体数目的限制,但是我们需要考虑PLC的存储空间以及扫描周期等影响。
PID控制是负反馈闭环控制,能够抑制系统闭环内的各种因素所引起的扰动,使反馈跟随给定变化。
PID控制算法有儿个关键的参数Kc (Gain,增益)Ti (积分时间常数),Td (微分时间常数)Ts (采样时间)在S7-200 SMART中PID功能是通过PID指令功能块实现。
通过定时(按照采样时间)执行PID 功能块,按照PID运算规律,根据当时的给定、反馈、比例一积分一微分数据,计算出控制量。
由f PID可以控制温度、压力等等许多对象,它们各口都是由工程量表示,因此有一种通用的数据表示方法才能被PID功能块识别。
S7-200 SMART中的PID功能使用占调节范围的白分比的方法抽象地表示被控对象的数值大小。
在实际工程中,这个调节范围往往被认为与被控对象(反馈)的测量范围(量程)一致。
一种基于双环PID控制的四旋翼飞行器控制方式
F福建电脑UJIAN COMPUTER福建电脑2018年第9期基金项目:福建省中青年教师科研项目(JAT170862);福建师范大学协和学院大学生创新创业训练计划项目:Y2018134720071.引言飞行控制器是四旋翼飞行器最核心的部分。
飞行控制器通过各种外接传感器与外界做出交互,并且可以根据外界的各种状况做出应对,使四旋翼飞行器能够在没有外界操作的情况下实现自主飞行及循迹等其他复杂动作[1]。
四旋翼飞行器的姿态控制分为角度单环控制和角速度双环控制两种。
单环控制以飞行器的角度差作为唯一控制输入,计算得出控制输出信号。
双环控制以角度外环,角速度内环串级控制产生控制输出信号。
为了实现无人机的姿态稳定控制和快速响应,一般采用单环控制,或者内环采用简单的串行调速,外环采用PID 控制[2]。
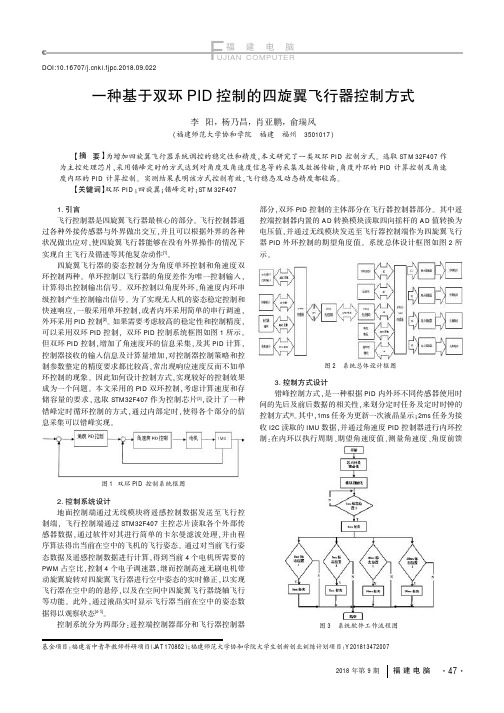
如果需要考虑较高的稳定性和控制精度,可以采用双环PID 控制,双环PID 控制系统框图如图1所示。
但双环PID 控制,增加了角速度环的信息采集,及其PID 计算,控制器接收的输入信息及计算量增加,对控制器控制策略和控制参数整定的精度要求都比较高,常出现响应速度反而不如单环控制的现象。
因此如何设计控制方式,实现较好的控制效果成为一个问题。
本文采用的PID 双环控制,考虑计算速度和存储容量的要求,选取STM32F407作为控制芯片[3],设计了一种错峰定时循环控制的方式,通过内部定时,使得各个部分的信息采集可以错峰实现。
2.控制系统设计地面控制端通过无线模块将遥感控制数据发送至飞行控制端,飞行控制端通过STM32F407主控芯片读取各个外部传感器数据,通过软件对其进行简单的卡尔曼滤波处理,并由程序算法得出当前在空中的飞机的飞行姿态。
通过对当前飞行姿态数据及遥感控制数据进行计算,得到当前4个电机所需要的PWM 占空比,控制4个电子调速器,继而控制高速无刷电机带动旋翼旋转对四旋翼飞行器进行空中姿态的实时修正,以实现飞行器在空中的的悬停,以及在空间中四旋翼飞行器绕轴飞行等功能。
PID调节控制做电机速度控制

2.4 参数调整规则的探索 ................................................................................................................. 6 2.5 自校正PID控制器 ...................................................................................................................... 7 3 软件说明 ............................................................................................................................................. 8 3.1 软件说明 ..................................................................................................................................... 8 3.2 档案构成 ..................................................................................................................................... 8 3.3 DMC界面 .................................................................................................................................... 8 3.4 子程序说明 ................................................................................................................................. 9 4 程序范例 ........................................................................................................................................... 16 4.1 DEMO程序 ............................................................................................................................... 16 4.2 程序流程与说明 ....................................................................................................................... 19 4.3 中断子流程与说明 ................................................................................................................... 20 5 MCU使用资源 ................................................................................................................................. 21 5.1 MCU硬件使用资源说明 .......................................................................................................... 21 6 实验测试 ........................................................................................................................................... 22 6.1 响应曲线 ................................................................................................................................... 22 7 参考文献 ........................................................................................................................................... 26
自控原理实验_PID调节器的设计与分析

实验六:PID 调节器的设计与分析一、实验目的:(1)了解P 、PI 、PID 三种工业常用调节器调节规律;(2)设计P 、PI 、PID 调节器,并通过Bode 单位阶跃响应曲线和图分析其效果和作用。
二、实验环境1、操作系统: WINDOWS 2000或以上;2、软件环境:MATLAB6.1及其以上;3、VGA 、SVGA 显卡,分辨率800╳600或以上;4、内存128M 或以上,硬盘25G 或以上;5、鼠标。
三、实验内容与要求 未加调节器时,系统结构图为)图6-1 无调节器的系统结构图其中选开环传递函数为通过实验,可以观察到响应曲线和Bode 图可以看出系统有振荡,因此需加调节器来调节。
在以下各系统中G(s)的模型均是上面表示的形式。
⑴ 加P 调节器加了P 调节器以后的系统结构图变为:图6-2 带P 调节器的系统结构图1)参数内定时,程序已经内定设置为Kp=0.02,观察响应曲线和Bode 图可以看)1.0(1)(+=s s s G出系统稳定性有所提高。
2)参数自设时,可以随意输入参数值,观察参数值变化对系统稳定性的影响,一般Kp值在0.01~0.1之间系统较为稳定。
同学可自己实践观察参数变化对系统的影响。
⑵加PI调节器加了PI调节器以后的系统结构图变为:图6-3 带PI调节器的系统结构图1)参数内定时,程序已经内定设置为Kp=0.1,Ki=0.001,观察响应曲线和Bode 图可以看出系统稳定性有所提高。
2)参数自设时,可以随意输入参数值,观察参数值变化对系统稳定性的影响。
对于本系统,一般Kp值在0.01~0.1之间、Ki值在0.001~0.01之间系统较为理想。
但是,由于此系统有两个参数,参数之间可以相互牵制,因此并非选择Kp值在0.01~0.1之间、Ki值在0.001~0.01之间的系统一定好,而不在此范围内系统就一定不好。
Kp值与Ki值之间有一定关系,一般要满足Kp ≥50Ki的关系,系统才能稳定。
PID控制LQRH控制器实例(已修正错误)
目录0 引言 (1)1 原系统的特性 (2)1.1 参考论文系统结构图分析 (2)1.2 控制对象的传递函数 (3)2 PID控制器设计 (4)2.1 PID控制器原理 (4)2.2 PID控制器设计 (6)2.3 控制器性能分析 (7)2.4 Simulink仿真link仿真 (8)3 极点配置控制器的设计 (10)3.1 极点配置设计 (10)3.2 极点配置控制器分析 (11)3.3 Simulink仿真 (12)4 LQR控制器的设计 (13)4.1 LQR控制器原理 (13)4.2 LQR控制器设计 (13)4.4 Simulink下仿真 (16)5 H∞控制器的设计 (19)5.1 H∞控制器原理 (19)5.2 H∞控制器设计 (21)5.3 H∞控制器分析 (27)5.4 Simulink下仿真 (27)6 综合比较 (28)参考文献 (29)0 引言随着磁盘驱动器轨道密度的不断增长,越来越多的算法被引入到磁盘驱动器的磁头定位上;由于H∞控制能详细的指定闭环系统的结构,利用H∞控制来增强HDD伺服系统的性能和鲁棒性成为一种可行的方法;本文将对几种常见的控制器:PID,极点配置,LQR和H∞控制器进行研究,并比较各种控制的优缺点。
本文则分别介绍了4种不同的控制控制器来改善系统的动态性能、稳态性能、跟踪性能和抗干扰性能。
1 原系统的特性1.1 参考论文系统结构图分析本文通过阅读《A Comparative Study of the Use of the Generalized Hold Function for HDDs》一文,对硬盘伺服系统的模型进行分析,如图1-1所示是参考论文系统结构图。
图1-1 参考论文系统结构图其中P 为控制对象、K 为控制器、S 为采样器、y 采样器测量值、v 为采样测量噪声、ω为外部干扰、W 为低通滤波器、U 为控制器输出、α、β和η比例因子。
参考论文采用的是H ∞控制器来改善一个离散系统性能,本文在没有考虑采样器情况下,针对控制对象P 来设计几种控制器来改善一个连续系统性能,并做了一个横向比较。
串级PID调试技巧
【调节串环PID大概过程(注意修正反向)】1、估计大概的起飞油门。
2、调整角速度内环参数。
3、将角度外环加上,调整外环参数。
4、横滚俯仰参数一般可取一致,将飞机解绑,抓在手中测试两个轴混合控制的效果(注意安全),有问题回到“烤四轴”继续调整,直至飞机在手中不会抽搐。
5、大概设置偏航参数(不追求动态响应,起飞后头不偏即可),起飞后再观察横滚和俯仰轴向打舵的反应,如有问题回到“烤四轴”。
6、横滚和俯仰ok以后,再调整偏航轴参数以达到好的动态效果。
*//*【过程详解】1、要在飞机的起飞油门基础上进行PID参数的调整,否则“烤四轴”的时候调试稳定了,飞起来很可能又会晃荡。
2、内环的参数最为关键!理想的内环参数能够很好地跟随打舵(角速度控制模式下的打舵)控制量。
在平衡位置附近(正负30度左右),舵量突加,飞机快速响应;舵量回中,飞机立刻停止运动(几乎没有回弹和震荡)。
2.1首先改变程序,将角度外环去掉,将打舵量作为内环的期望(角速度模式,在APM中叫ACRO模式,在大疆中叫手动模式)。
2.2加上P,P太小,不能修正角速度误差表现为很“软”倾斜后难以修正,打舵响应也差。
P太大,在平衡位置容易震荡,打舵回中或给干扰(用手突加干扰)时会震荡。
合适的P能较好的对打舵进行响应,又不太会震荡,但是舵量回中后会回弹好几下才能停止(没有D)。
2.3加上D,D的效果十分明显,加快打舵响应,最大的作用是能很好地抑制舵量回中后的震荡,可谓立竿见影。
太大的D会在横滚俯仰混控时表现出来(尽管在“烤四轴”时的表现可能很好),具体表现是四轴抓在手里推油门会抽搐。
如果这样,只能回到“烤四轴”降低D,同时P也只能跟着降低。
D调整完后可以再次加大P值,以能够跟随打舵为判断标准。
2.4加上I,会发现手感变得柔和了些。
由于笔者“烤四轴”的装置中四轴的重心高于旋转轴,这决定了在四轴偏离水平位置后会有重力分量使得四轴会继续偏离平衡位置。
I的作用就可以使得在一定角度范围内(30度左右)可以修正重力带来的影响。
电机电流环pid调节技巧

电机电流环pid调节技巧电机是现代工业中常见的设备之一,其广泛应用于各个领域,包括工业生产、交通运输、家用电器等。
而电机的工作性能往往需要通过PID调节技巧来实现。
本文将围绕电机电流环PID调节技巧展开讨论,介绍PID控制原理、调节参数的选取方法以及一些常见的优化策略,帮助读者更好地理解和应用PID调节技巧。
一、PID控制原理PID控制是一种基于反馈的控制方法,通过不断调整输出信号以使系统响应达到期望值。
PID控制器由比例项(P项)、积分项(I项)和微分项(D项)组成,分别对应控制器输出与误差、误差累积和误差变化率之间的关系。
比例项用于快速响应系统的变化,积分项用于消除稳态误差,微分项用于抑制系统的震荡。
二、调节参数的选取方法1. 比例增益(Kp):比例增益决定了输出信号与误差之间的线性关系。
增大比例增益可提高系统的响应速度,但也会增加系统的震荡风险。
因此,需要在响应速度和稳定性之间进行权衡,根据实际情况选择合适的比例增益。
2. 积分时间(Ti):积分时间决定了积分作用的持续时间,用于消除系统的稳态误差。
较大的积分时间可以更好地消除稳态误差,但也会增加系统的响应时间。
因此,需要根据系统的要求选择适当的积分时间。
3. 微分时间(Td):微分时间决定了微分作用的响应速度,用于抑制系统的震荡。
较大的微分时间可以更好地抑制系统的震荡,但也会增加系统的超调量。
因此,需要根据系统的要求选择适当的微分时间。
三、常见的优化策略1. 自整定法:通过系统的自整定功能,自动测定系统的参数,实现快速且准确的PID控制。
这种方法适用于一些系统参数变化较大的情况。
2. Ziegler-Nichols法:通过实验方法,逐步调整PID参数,使系统达到临界稳定状态,然后根据临界稳定状态下的参数值来计算PID参数。
这种方法适用于一些线性系统。
3. 优化算法:利用优化算法,如遗传算法、粒子群算法等,自动搜索最优的PID参数组合。
这种方法适用于一些复杂的非线性系统。
PID算法设计宣教

❖ 若将百分比和积分两种作用结合起来,就构成PI 调整器,调整规律为:
❖
(3)
❖ PI调整器旳输出特征曲线如图3所示
e(t) t
0 y
y2
K1 KP e(t)
y1=KP e(t)
t
0
图3 PI调整器旳输出特征曲线
3. 百分比微分调整器
❖ 微分调整器旳微分方程为:
❖
(4)
❖ 微分作用响应曲线如图4所示。
❖ 在凑试时,可参照以上参数对系统控制过程旳影 响趋势,对参数调整实施先百分比、后积分,再 微分旳整定环节。
❖ 首先整定百分比部分。将百分比参数由小变大, 并观察相应旳系统响应,直至得到反应快、超调 小旳响应曲线。假如系统没有静差或静差已经小 到允许范围内,而且对响应曲线已经满意,则只 需要百分比调整器即可。
图1 阶跃响应特征曲线
2. 百分比积分调整器
❖ 所谓积分作用是指调整器旳输出与输入偏差旳积 提成百分比旳作用。积分方程为:
❖
(2)
❖ 式中:TI是积分时间常数,它表达积分速度旳大 小,TI越大,积分速度越慢,积分作用越弱。积 分作用旳响应特征曲线,如图2所示。
e(t) t
0 y
t 0
图2积分作用响应曲线
❖ 然后将已经调整好旳百分比系数略为缩小(一般缩 小为原值旳0.8),然后减小积分时间,使得系统 在保持良好动态性能旳情况下,静差得到消除。 在此过程中,可根据系统旳响应曲线旳好坏反复 变化百分比系数和积分时间,以期得到满意旳控 制过程和整定参数。
❖ 假如在上述调整过程中对系统旳动态过程反复调 整还不能得到满意旳成果,则能够加入微分环节。 首先把微分时间D设置为0,在上述基础上逐渐增 长微分时间,同步相应旳变化百分比系数和积分 时间,逐渐凑试,直至得到满意旳调整效果。
一文读懂:PID控制器中位置环P和速度环PI控制器参数确定

1 速度环PI 控制器参数确定速度环PI 反馈控制器的形式如()vivc vpK G s K s(0-1)被控系统()G s 的传递函数为11G sb s(0-2)本实验直线模组辨识模型为0.00067381()0.000093110.00056950.8452110.16349G s s s(0-3)考虑一般情况,即带有速度检出低通滤波器的系统,设滤波器传递函数为f G s ,采用一个二阶butterworth 低通滤波器,则2222nf n nw G ssw sw(0-4)其中n w 为低通滤波器截止频率。
开环系统截止频率c w 表示系统开环响应下降到0db 时的角频率,即()()()1vc c c f c G jw G jw G jw(0-5)可得2224222222212vi nvpcn c n c c K wKb w w w w w w(0-6)根据开环相角裕度要求,有mvc c c f cG jw G jw G jw (0-7)可得到222arctanarctanarctan2vp cn cmcvin c Kw w w w K w w (0-8)简化后可得222tanarctanarctan2vpc n c mcvin c Kw w w piw K w w (0-9)取600*2*3770/, 800/ ,60ncmw pirad s w rad s (0-10)0.84521,0.16349b(0-11)计算可以得到速度环PI 的控制参数32.327vpK(0-12)5967.055viK(0-13)当取255*2*1600/, 500/ ,60ncmw pirad s w rad s (0-14)0.84521,0.16349b(0-15)计算可以得到速度环PI 的控制参数69.2013vpK(0-16)2810.7211viK(0-17)2 速度环的PI 验证采用正弦信号验证速度环PI 控制3 低通滤波器设计由于经过编码器的差分信号会产生高频噪声,所以对反馈回来的速度信号需要进行滤波处理。
PID参数设置及调节方法
PID参数设置及调节方法PID控制器是一种通过对被控对象的测量值与参考值进行比较,并根据误差值来调整控制器输出的方法。
PID参数的设置和调节是PID控制的关键部分,合理的参数设置可以使系统稳定性和响应速度达到最佳状态。
本文将详细介绍PID参数的设置方法以及常用的调节方法。
一、PID参数设置方法:1.经验法:通过实际系统控制经验来设置PID参数。
a.暂时忽略I和D项,先将P参数设为一个较小的值进行试控,观察系统的响应情况。
b.根据实际系统的特性,逐渐增大P参数,直至系统开始发散或产生剧烈振荡,这时就找到了P参数的临界值。
c.根据实际系统的稳态误差,调整I参数,使系统能够快速消除稳态误差。
d.根据系统的动态响应情况,调整D参数,使系统的超调量和响应速度达到最优。
2. Ziegler-Nichols方法:利用开环实验数据来设置PID参数。
a.将系统工作在开环状态下,即没有反馈控制。
b.逐步增大控制器的P参数,直至系统开始发散或产生剧烈振荡,记下此时的P临界值Ku。
c.通过实验得到的P临界值Ku,可以根据以下公式得到PID参数:-P参数:Kp=0.6*Ku-I参数:Ti=0.5*Tu-D参数:Td=0.125*Tu其中,Tu为系统开始发散或产生剧烈振荡时的周期。
3. Cohen-Coon方法:利用闭环实验数据来设置PID参数。
a.在系统工作在闭环状态下,进行阶跃响应实验。
b.根据实验得到的曲线,计算响应曲线的时间常数T和该时间常数对应的增益K。
c.根据以下公式计算PID参数:-P参数:Kp=0.5*(K/T)-I参数:Ti=0.5*T-D参数:Td=0.125*T二、PID参数调节方法:1.手动调节法:通过观察系统响应曲线和实际系统需求来手动调整PID参数。
a.调整P参数:增大比例系数可以加快系统的响应速度,但可能会引起系统的振荡;减小比例系数可以减小系统的超调和振荡,但可能会导致响应速度过慢。
b.调整I参数:增大积分系数可以消除系统的稳态误差,但可能会使系统响应速度变慢或产生振荡;减小积分系数可以减小系统的超调和振荡,但可能会引起稳态误差。
PID温控器控制原理
PID温控器控制原理电脑控制温控器:采用PID模糊控制技术*用先进的数码技术通过Pvar、Ivar、Dvar(比例、积分、微分)三方面的结合调整形成一个模糊控制来解决惯性温度误差问题。
据了解,很多厂家在使用温控器的过程中,往往碰到惯性温度误差的问题,苦于无法解决,依靠手工调压来控制温度。
创新,采用了PID模糊控制技术,较好地解决了惯性温度误差的问题。
传统的温控器,是利用热电偶线在温度化变化的情况下,产生变化的电流作为控制信号,对电器元件作定点的开关控制器。
传统的温控器的电热元件一般以电热棒、发热圈为主,两者里面都用发热丝制成。
发热丝通过电流加热时,通常达到1000℃以上,所以发热棒、发热圈内部温度都很高。
一般进行温度控制的电器机械,其控制温度多在0-400℃之间,所以,传统的温控器进行温度控制期间,当被加热器件温度升高至设定温度时,温控器会发出信号停止加热。
但这时发热棒或发热圈的内部温度会高于400℃,发热棒、发热圈还将会对被加热的器件进行加热,即使温控器发出信号停止加热,被加热器件的温度还往往继续上升几度,然后才开始下降。
当下降到设定温度的下限时,温控器又开始发出加热的信号,开始加热,但发热丝要把温度传递到被加热器件需要一定的时候,这就要视乎发热丝与被加热器件之间的介质情况而定。
通常开始重新加热时,温度继续下降几度。
所以,传统的定点开关控制温度会有正负误差几度的现象,但这不是温控制器本身的问题,而是整个热系统的结构性问题,使温控器控温产生一种惯性温度误差。
要解决温控器这个问题,采用PID模糊控制技术,是明智的选择。
PID模糊控制,是针对以上的情况而制定的、新的温度控制方案,用先进的数码技术通过Pvar、Ivar、Dvar三方面的结合调整,形成一个模糊控制,来解决惯性温度误差问题。
然而,在很多情况下,由于传统的温控器温控方式存在较大的惯性温度误差,往往在要求精确的温控时,很多人会放弃自动控制而采用调压器来代替温控器。
RAEGuard_PID产品简介

RAEGuard介绍
• • • • • • • 防爆外壳 操作简便 3 键面板 磁性操作键 维护简单 9 – 36 V DC操作 4-20mA输出
两种模式
• 扩散模式
– 采样泵把气体吸入气室,经过紫外灯离子化后通过传感 器 – 气体流回到 ‘气源’
• 流经模式
– 采样泵把气体吸入气室,经过紫外灯离子化后通过传感 器 – 气体流过仪器从后面流出 – 采样
紫外灯和传感器
• • • • • 长寿命 10.6 eV 紫外灯 3 维设计传感器 0.01 – 19.9 ppm (超高灵敏度) 0.1 – 99 ppm 1 – 999 ppm
• 注意:检测范围应在订购时确定,用户不能自行更 改
性能
维护保养
• 重点:灯和传感器的清洗、校正 • 灯和传感器的清洗或更换步骤:
– – – – – – 打开外壳 松开传感器模块 小心取出 拔去导线插头 取出传感器 用甲醇清洗
• 用异丁烯校正
– 更多关于校正方面的操作请参阅操作手册
关键特性
• 固定式VOC 检测系统 • 它同我们所了解的其它 PID 传感器一样!!
– 我们在其它PID传感器上获得的使用和销售经验对固定 式同样有用
接线柱编号
1 2 3
6 7 8
• 重新装好仪器
Power supply positive(电源正极)
预热
• • • • 预热期为 60 秒 将启动逐项自动检查功能 预热过程中检查仪器 如果发现故障,仪器将自动显单
• 进行零点和标准气体校正
– 高级菜单
• • • • 报警设定 CF参数设定 标准气体浓度值 采样泵载空循环比
• 通过两个螺钉固定 • 拆开仪器 • 里面有两个绿色的接线块
双闭环pi参数调节技巧
双闭环pi参数调节技巧双闭环PI参数调节技巧双闭环控制系统在工业自动化领域中广泛应用。
它通过两个反馈回路实现对系统动态性能和静态误差的优化,实现更高的控制精度和稳定性。
其中一个重要的技术就是PI参数调节。
下面详细介绍一些双闭环PI参数调节的技巧。
1. 基本原理在双闭环控制系统中,通常主闭环和从闭环都采用PI控制器的结构。
主闭环控制物理量,从闭环控制误差和抗干扰能力。
在进行参数调节时,首先需要确定主闭环中的KP和KI参数,然后确定从闭环中的KP 和KI参数。
2. 主闭环参数调节主闭环控制物理量,需要根据系统特性和控制需求,设计合适的KP和KI参数。
一般来说,KP参数用于调节系统的静态响应,KI参数用于调节系统的动态性能。
如果系统响应较慢,则适当增大KP参数;如果系统稳定性不够,则适当增大KI参数。
3. 从闭环参数调节从闭环控制误差和抗干扰能力,需要根据主闭环控制物理量的变化,实时调整从闭环参数。
如系统响应慢,则适当增大从闭环控制器的KP 参数;如果系统稳定性不够,则适当增大KI参数。
同时,在从闭环中加入差分项可以有效地增强抗干扰能力,提高系统的稳定性。
4. 联合参数调节最终的参数调节需要综合考虑主闭环和从闭环的控制特性,使系统可以在动态性能和静态误差方面达到最佳表现。
同时,还需要在实际应用中进行反复测试,不断修改参数值来优化系统的性能。
在这个过程中,应该通过适当的限幅和滤波方法来避免参数变化过大带来的系统振荡和不稳定性问题。
5. 具体应用双闭环控制系统已经广泛应用于机械制造、液压传动、电力电气等领域中。
例如,在坐标控制系统中,主闭环可以控制机床位置,从闭环可以控制精度误差;在液压传动系统中,主闭环可以控制电机转速,从闭环可以控制液压缸位移,从而实现对工厂生产线上的工艺流程的控制。
综上所述,双闭环PI参数调节技巧是一项非常重要的自动控制技术。
在实际应用中,需要科学合理的参数调节方法和技巧来提高系统的动态性能和静态精度,实现自动化控制和优化生产流程。
PID参数的设定
PID参数的设定与调节燕化合成橡胶事业部电仪车间张秀清PID控制简介目前工业自动化水平已成为衡量各行各业现代化水平的一个重要标志。
同时,控制理论的发展也经历了古典控制理论、现代控制理论和智能控制理论三个阶段。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控控制系统包括控制器﹑传感器﹑变送器﹑执行机构﹑输入输出接口。
控制器的输出经过输出接口﹑执行机构﹐加到被控系统上﹔控制系统的被控量﹐经过传感器﹐变送器﹐通过输入接口送到控制器。
目前,在石油化工行业PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用,有各种各样的PID控制器产品,各大公司均开发了具有PID参数自整定功能的智能调节器(intelligent regulator)或软件,其中PID控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
目前在我们厂大部分控制系统采用DCS控制系统,均没有实现PID参数的自整定功能,下面本人结合多年的工作经验就控制系统的基本概念和PID参数的整定方法与大家探讨。
1、开环控制系统开环控制系统(open-loop control system)是指被控对象的输出(被控制量)对控制器(controller)的输出没有影响。
在这种控制系统中,不依赖将被控量反送回来以形成任何闭环回路。
在我们石油化工企业用得很少。
2、闭环控制系统闭环控制系统(closed-loop control system)的特点是系统被控对象的输出(被控制量)会反送回来影响控制器的输出,形成一个或多个闭环。
闭环控制系统有正反馈和负反馈,若反馈信号与系统给定值信号相反,则称为负反馈( Negative Feedback),若极性相同,则称为正反馈,一般闭环控制系统均采用负反馈,又称负反馈控制系统。
闭环控制系统的例子很多。
比如人就是一个具有负反馈的闭环控制系统,眼睛便是传感器,充当反馈,人体系统能通过不断的修正最后作出各种正确的动作。
调节器
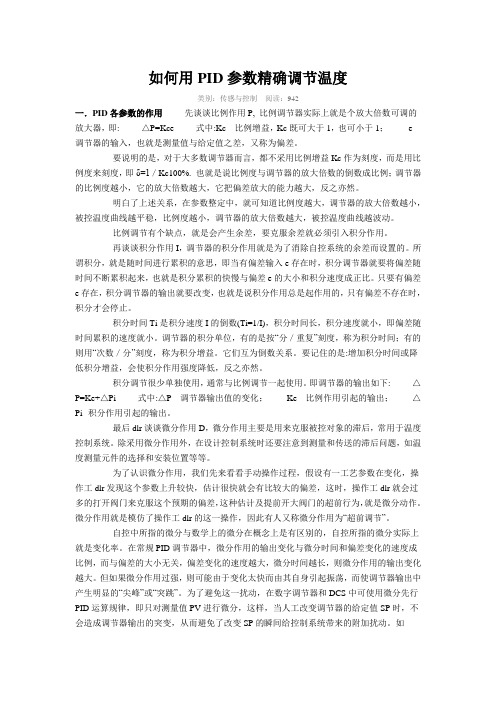
如何用PID参数精确调节温度类别:传感与控制阅读:942一.PID各参数的作用先谈谈比例作用P, 比例调节器实际上就是个放大倍数可调的放大器,即: △P=Kce 式中:Kc---比例增益,Kc既可大于1,也可小于1;e---调节器的输入,也就是测量值与给定值之差,又称为偏差。
要说明的是,对于大多数调节器而言,都不采用比例增益Kc作为刻度,而是用比例度来刻度,即δ=1/Kc100%. 也就是说比例度与调节器的放大倍数的倒数成比例;调节器的比例度越小,它的放大倍数越大,它把偏差放大的能力越大,反之亦然。
明白了上述关系,在参数整定中,就可知道比例度越大,调节器的放大倍数越小,被控温度曲线越平稳,比例度越小,调节器的放大倍数越大,被控温度曲线越波动。
比例调节有个缺点,就是会产生余差,要克服余差就必须引入积分作用。
再谈谈积分作用I,调节器的积分作用就是为了消除自控系统的余差而设置的。
所谓积分,就是随时间进行累积的意思,即当有偏差输入e存在时,积分调节器就要将偏差随时间不断累积起来,也就是积分累积的快慢与偏差e的大小和积分速度成正比。
只要有偏差e存在,积分调节器的输出就要改变,也就是说积分作用总是起作用的,只有偏差不存在时,积分才会停止。
积分时间Ti是积分速度I的倒数(Ti=1/I),积分时间长,积分速度就小,即偏差随时间累积的速度就小。
调节器的积分单位,有的是按“分/重复”刻度,称为积分时间;有的则用“次数/分”刻度,称为积分增益。
它们互为倒数关系。
要记住的是:增加积分时间或降低积分增益,会使积分作用强度降低,反之亦然。
积分调节很少单独使用,通常与比例调节一起使用。
即调节器的输出如下: △P=Ke+△Pi 式中:△P---调节器输出值的变化;Ke---比例作用引起的输出;△Pi--积分作用引起的输出。
最后dlr谈谈微分作用D,微分作用主要是用来克服被控对象的滞后,常用于温度控制系统。
除采用微分作用外,在设计控制系统时还要注意到测量和传送的滞后问题,如温度测量元件的选择和安装位置等等。
TRIO位置环PID调节
1:准备在调节位置环之前,一定首先调节伺服驱动器上速度环PID参数。
本篇文章是在以下假设条件下完成的:速度环响应特性良好,电机双向都有一段安全运动距离。
在调节位置环时,为了使增益参数准确,需要在带实际负载的情况下进行调节。
下面是用来调节参数的程序,在控制器内执行。
这段程序让电机在正负八分之一圈内来回旋转。
' Intialise the axis for P Loop tuningBASE(0)UNITS=1DEFPOS(0)WAIT UNTIL OFFPOS=0counts_per_rev=4000' set speed to 3000 rpmSPEED=counts_per_rev*3000/60ACCEL=SPEED*1000DECEL=ACCELFE_LIMIT=counts_per_rev/2SERVO=ONWDOG=ONstepsize=INT(counts_per_rev/8)WHILE TRUETRIGGERWA(20)MOVE(stepsize)WA(500)MOVE(-stepsize)WA(480)WEND如果机械结果决定只能向一个方向运动。
程序修改如下:stepsize=INT(counts_per_rev/8)WHILE TRUETRIGGERWA(20)MOVE(stepsize)WA(480)DEFPOS(0)WEND在运行程序之前,确定该轴当前运动状态为IDLE。
打开轴参数和示波器。
设置示波器观测参数为该轴的MPOS和DPOS,横轴时间参数为20msec。
点击option,设置每格采样点数为10或20.设置示波器为程序触发。
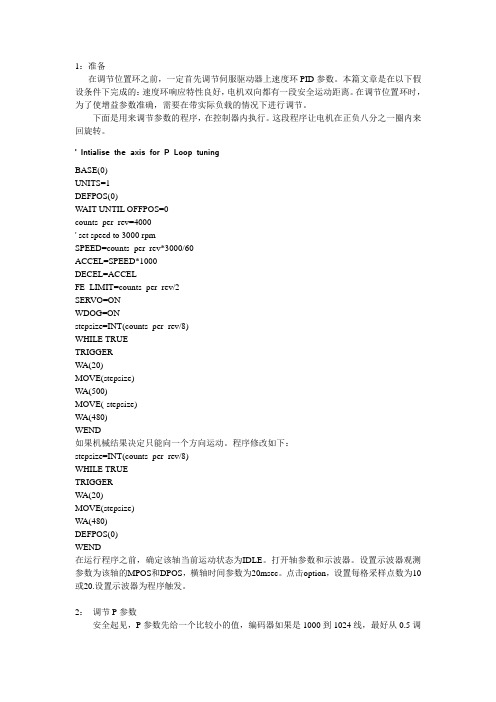
2:调节P参数安全起见,P参数先给一个比较小的值,编码器如果是1000到1024线,最好从0.5调起,其他增益参数都设置为0运行程序,并触发示波器,响应曲线应该如下图所示:接下来一点一点的,小心的增加P参数,直到曲线显示如下图:如果曲线如下图所示,证明P参数过大了,此是应该适当减小。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
/******************************************************************************* ***********函数类型:双环PID适用编程环境:CS+参数个数:共15个分别为三种姿态每种姿态各有5个参数:外环(角度环)的P、I、D 及内环(角速度环)的P、D函数说明:1、这个双环PID是根据crazepony的串行PID的伪代码改的用于瑞萨的程序本双环PID 外环是角度环有P、I、D三个参数外环PID输出公式为:外环PIDout = P * 角度差 + I * 角度差积分 + D * 角速度(其中角度差=期望角度-实时角度;另外由于角度差的微分为角速度所以直接用6050读出的角速度参与计算)内环是角速度环有P、D两个参数内环PD输出公式为:内环PDout = P * 角速度差 + D * 角加速度(其中角速度差=外环PID输出-实时角速度;另外由于角速度差的微分为角加速度所以直接用6050读出的角加速度参与计算)2、期望角度(Q_Roll,Q_Pitch,Q_Yaw)由主程序mpu6050初始化后得出3、瑞萨编译器CS+中汉语字符乱码所以所有注释均由拼音给出******************************************************************************** *************//**** bian liang & chang liang ding yi *********//*******chang liang ding yi *********/double Q_Roll,Q_Pitch,Q_Yaw; //chu shi jiao du (qi wang jiao)/*******bian liang ding yi ********/double RA_Roll,RA_Pitch,RA_Yaw; //shi shi jiao du//double RA_Roll_old,RA_Pitch_old,RA_Yaw_old; //shang yi ci jiao du zhi double RS_Roll,RS_Pitch,RS_Yaw; //shi shi jiao su du//double RS_Roll_old,RS_Pitch_old,RS_Yaw_old; //shang yi ci jiao su du zhi double RJ_Roll,RJ_Pitch,RJ_Yaw; //shi shi jiao jia su du/*****WAI HUAN****///wai huan bian liangdouble W_Roll_p,W_Pitch_p,W_Yaw_p; //wai huan bi li bian liangdouble W_Roll_i,W_Pitch_i,W_Yaw_i; //wai huan ji fen bian liangdouble W_Roll_d,W_Pitch_d,W_Yaw_d; //wai huan wei fen bian liang//wai huan PID can shudouble P_W_Roll,P_W_Pitch,P_W_Yaw; //wai huan P can shudouble I_W_Roll,I_W_Pitch,I_W_Yaw; //wai huan I can shudouble D_W_Roll,D_W_Pitch,D_W_Yaw; //wai huan D can shu//wai huan PID shu chudouble W_PIDout_Roll,W_PIDout_Pitch,W_PIDout_Yaw; //wai huan PID shu chu /****** JIAO SU DU CHA ****/double S_C_Roll,S_C_Pitch,S_C_Yaw; //jiao su du cha = wai huan PID - dang qian jiao su du/*****NEI HUAN****///nei huan bian liangdouble N_Roll_p,N_Pitch_p,N_Yaw_p; //nei huan bi li bian liangdouble N_Roll_d,N_Pitch_d,N_Yaw_d; //nei huan wei fen bian liang//nei huan PID can shudouble P_N_Roll,P_N_Pitch,P_N_Yaw; //nei huan P can shudouble D_N_Roll,D_N_Pitch,D_N_Yaw; //wai huan D can shu//nei huan PD shu chudouble N_PDout_Roll,N_PDout_Pitch,N_PDout_Yaw; //nei huan PD shu chu/*********** han shu sheng ming **************/double ji_fen_i(double,double);void double_PID_control(){/****PID can shu tiao zheng*****///wai huanP_W_Roll=0;I_W_Roll=0;D_W_Roll=0;P_W_Pitch=0;I_W_Pitch=0;D_W_Pitch=0;P_W_Yaw=0; //wai huan P can shuI_W_Yaw=0; //wai huan I can shuD_W_Yaw=0; //wai huan D can shu//nei huanP_N_Roll=0;D_N_Roll=0;P_N_Pitch=0;D_N_Pitch=0;P_N_Yaw=0; //nei huan P can shuD_N_Yaw=0; //wai huan D can shu/*********wai huan ge fen shi ji shuan*******/// bi li_pW_Roll_p=Q_Roll-RA_Roll;W_Pitch_p=Q_Pitch-RA_Pitch;W_Yaw_p=Q_Yaw-RA_Yaw;//ji fen_iW_Roll_i=ji_fen_i(Q_Roll,RA_Roll);W_Pitch_i=ji_fen_i(Q_Pitch,RA_Pitch);W_Yaw_i=ji_fen_i(Q_Yaw,RA_Yaw);//wei fen_d//W_Roll_d=wei_fen_d(Q_Roll,RA_Roll,RA_Roll_old);//W_Pitch_d=wei_fen_dQ_Pitch,RA_Pitch,RA_Pitch_old);//W_Yaw_d=wei_fen_d(Q_Yaw,RA_Yaw,RA_Yaw_old);/*********wai huan PID shu chu***********/W_PIDout_Roll=(P_W_Roll*W_Roll_p+I_W_Roll*W_Roll_i+D_W_Roll*RS_Roll); //wai huan PID= P * JIAO DU CHA + I * JIAO DU CHA JI FEN + D * DANG QIAN JIAO SU DUW_PIDout_Pitch=(P_W_Pitch*W_Pitch_p+I_W_Pitch*W_Pitch_i+D_W_Pitch*RS_Pitch);W_PIDout_Yaw=(P_W_Yaw*W_Yaw_p+I_W_Yaw*W_Yaw_i+D_W_Yaw*RS_Yaw);/************ JIAO SU DU CHA **********************/S_C_Roll=(W_PIDout_Roll-RS_Roll);S_C_Pitch=(W_PIDout_Pitch-RS_Pitch);S_C_Yaw=(W_PIDout_Yaw-RS_Yaw);/********** nei huan ge fen shi ji suan********///bi li_pN_Roll_p=S_C_Roll; //nei huan bi li xiang = jiao sudu chaN_Pitch_p=S_C_Pitch;N_Yaw_p=S_C_Yaw;//wei fen_dN_Roll_d=RJ_Roll; //nei huan wei fen xiang = jiaojia su duN_Pitch_d=RJ_Pitch;N_Yaw_d=RJ_Yaw;/******************* nei huan PID shu chu************/N_PDout_Roll=(P_N_Roll*N_Roll_p+D_N_Roll*N_Roll_d);N_PDout_Pitch=(P_N_Pitch*N_Pitch_p+D_N_Pitch*N_Pitch_d);N_PDout_Yaw=(P_N_Yaw*N_Yaw_p+D_N_Yaw*N_Yaw_d);/******* END ***************/}/***********ji fen yun suan han shu*******/double ji_fen_i(double q,double r){double s=0;int i=0;for(i=0;i<100000;i++){s+=(q-r*r/100000);r+=((q-r)/100000);}return s;}。