八数码问题报告
A星算法求八数码问题实验报告
A星算法求八数码问题实验报告人工智能实验报告实验名称:八数码问题姓名:xx学号:2012210xxxx计算机学院2014年1月14日一.实验目的掌握A*的思想,启发式搜索,来求解在代价最小的情况下将九宫格从一个状态转为另状态的路径。
二.实验内容给定九宫格的初始状态,要求在有限步的操作内,使其转化为目标状态,且所得到的解是代价最小解(2 8 31 6 47 0 52 8 31 6 47 0 5三、A*算法思想:1、思想:A*算法是一种静态路网中求解最短路最有效的直接搜索方法。
估价值与实际值越接近,估价函数取得就越好2、原理:估价函数公式表示为: f(n)=g(n)+h(n),其中 f(n) 是从初始点经由节点n到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n) 是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解的)条件,关键在于估价函数h(n)的选取:估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
并且如果h(n)=d(n),即距离估计h(n)等于最短距离,那么搜索将严格沿着最短路径进行此时的搜索效率是最高的。
如果估价值>实际值,搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
四、算法流程:Heuristic_Search(启发式搜索)While是从未拓展表中删N为目是,输出路径否,生成n的所有子状态Case:此子状Case:此子状Case:此子状计算该子状记录比已有记录比已有返回五、关键技术:1、使用了CreateChild()函数,求得了任意未拓展九宫格的扩展结点,便于拓展子空间,搜索所有情况。
关键代码:bool CreateChild(NOExtend ns[],NOExtend ne){int i,j,k=0;for(i=0;i<3;i++){for(j=0;j<3;j++){if(ne.cur_sudoku.num[i][j]==0){ //寻找九宫格空缺所在的坐标if(i-1>=0){ //将空格向上移动CopySudoku(ns[k].cur_sudoku,ne.cur_sudo ku);//先把未改变的九宫格复制给九宫格数组的某一元素ns[k].cur_sudoku.num[i][j]=ne.cur_sudoku.num[i-1][j];//然后仅改变此二维九宫格的两项值即可ns[k].cur_sudoku.num[i-1][j]=0;ns[k].dx=1;k++;}if(j+1<=2){ //将空格向右移动CopySudoku(ns[k].cur_sudoku,ne.cur_sudo ku);ns[k].cur_sudoku.num[i][j]=ns[k].cur_su doku.num[i][j+1];ns[k].cur_sudoku.num[i][j+1]=0;ns[k].dx=1;k++;}if(i+1<=2){ //将空格向下移动CopySudoku(ns[k].cur_sudoku,ne.cur_sudo ku);ns[k].cur_sudoku.num[i][j]=ns[k].cur_su doku.num[i+1][j];ns[k].cur_sudoku.num[i+1][j]=0;ns[k].dx=1;k++;}if(j-1>=0){ //将空格向左移动CopySudoku(ns[k].cur_sudoku,ne.cur_sudo ku);ns[k].cur_sudoku.num[i][j]=ns[k].cur_su doku.num[i][j-1];ns[k].cur_sudoku.num[i][j-1]=0;ns[k].dx=1;k++;}return 1;}}}return 0;2、用启发式搜索函数寻找求解路径,运用了A*算法的思想,能够更快的求解出最优解。
八数码问题求解实验报告
八数码问题求解(一)实验软件TC2.0或VC6.0编程语言或其它编程语言(二)实验目的1.熟悉人工智能系统中的问题求解过程;2.熟悉状态空间的盲目搜索和启发式搜索算法的应用;3.熟悉对八数码问题的建模,求解及编程语言的应用。
(三)实验内容八数码问题:在3×3的方格棋盘上,摆放着1到8这八个数码,有一个方格是空的,要求对空格执行空格左移,空格右移,空格上移,空格下移这四个操作使得棋盘从初始状态到目标状态。
输入初始状态和目标状态,输出从初始状态到目标状态的路径。
(四)实验代码#include"stdafx.h"#include<iostream>#include<ctime>#include<vector>using namespace std;const int ROW = 3;const int COL = 3;const int MAXDISTANCE = 10000;const int MAXNUM = 10000;typedef struct_Node{int digit[ROW][COL];int dist; // distance between one state and the destination int dep; // the depth of node// So the comment function = dist + dep.int index; // point to the location of parent} Node;Node src, dest;vector<Node> node_v; // store the nodesbool isEmptyOfOPEN() {for (int i = 0; i < node_v.size(); i++) {if (node_v[i].dist != MAXNUM)return false;}return true;}bool isEqual(int index, int digit[][COL]) {for (int i = 0; i < ROW; i++)for (int j = 0; j < COL; j++) {if (node_v[index].digit[i][j] != digit[i][j])return false;}return true;}ostream& operator<<(ostream& os, Node& node) {for (int i = 0; i < ROW; i++) {for (int j = 0; j < COL; j++)os << node.digit[i][j] << ' ';os << endl;}return os;}void PrintSteps(int index, vector<Node>& rstep_v) { rstep_v.push_back(node_v[index]);index = node_v[index].index;while (index != 0) {rstep_v.push_back(node_v[index]);index = node_v[index].index;}for (int i = rstep_v.size() - 1; i >= 0; i--)cout << "Step " << rstep_v.size() - i<< endl << rstep_v[i] << endl;}void Swap(int& a, int& b) {int t;t = a;a = b;b = t;}void Assign(Node& node, int index) {for (int i = 0; i < ROW; i++)for (int j = 0; j < COL; j++)node.digit[i][j] = node_v[index].digit[i][j];}int GetMinNode() {int dist = MAXNUM;int loc; // the location of minimize nodefor (int i = 0; i < node_v.size(); i++) {if (node_v[i].dist == MAXNUM)continue;else if ((node_v[i].dist + node_v[i].dep) < dist) {loc = i;dist = node_v[i].dist + node_v[i].dep;}}return loc;}bool isExpandable(Node& node) {for (int i = 0; i < node_v.size(); i++) {if (isEqual(i, node.digit))return false;}return true;}//扩展int Distance(Node& node, int digit[][COL]) {int distance = 0;bool flag = false;for (int i = 0; i < ROW; i++)for (int j = 0; j < COL; j++)for (int k = 0; k < ROW; k++) {for (int l = 0; l < COL; l++) {if (node.digit[i][j] == digit[k][l]) {distance += abs(i - k) + abs(j - l);//abs()求得是正数的绝对值。
八数码问题 实验报告

八数码问题实验报告八数码问题实验报告引言:八数码问题是一种经典的数学难题,在计算机科学领域有着广泛的研究和应用。
本实验旨在通过探索八数码问题的解法,深入理解该问题的本质,并通过实验结果评估不同算法的效率和准确性。
一、问题描述:八数码问题是一个在3×3的棋盘上,由1至8的数字和一个空格组成的拼图问题。
目标是通过移动棋盘上的数字,使得棋盘上的数字排列按照从小到大的顺序排列,最终形成如下的目标状态:1 2 34 5 67 8二、解法探索:1. 深度优先搜索算法:深度优先搜索算法是一种经典的解决拼图问题的方法。
该算法通过不断尝试所有可能的移动方式,直到找到目标状态或者无法再继续移动为止。
实验结果显示,该算法在八数码问题中能够找到解,但由于搜索空间庞大,算法的时间复杂度较高。
2. 广度优先搜索算法:广度优先搜索算法是另一种常用的解决八数码问题的方法。
该算法通过逐层扩展搜索树,从初始状态开始,逐步扩展所有可能的状态,直到找到目标状态。
实验结果显示,该算法能够找到最短路径的解,但同样面临搜索空间庞大的问题。
3. A*算法:A*算法是一种启发式搜索算法,结合了深度优先搜索和广度优先搜索的优点。
该算法通过使用一个估价函数来评估每个搜索状态的优劣,并选择最有希望的状态进行扩展。
实验结果显示,A*算法在八数码问题中表现出色,能够高效地找到最优解。
三、实验结果与分析:通过对深度优先搜索、广度优先搜索和A*算法的实验,得出以下结论:1. 深度优先搜索算法虽然能够找到解,但由于搜索空间庞大,时间复杂度较高,不适用于大规模的八数码问题。
2. 广度优先搜索算法能够找到最短路径的解,但同样面临搜索空间庞大的问题,对于大规模问题效率较低。
3. A*算法在八数码问题中表现出色,通过合理的估价函数能够高效地找到最优解,对于大规模问题具有较好的效果。
四、结论与展望:本实验通过对八数码问题的解法探索,深入理解了该问题的本质,并评估了不同算法的效率和准确性。
八数码实验报告

八数码实验报告八数码实验报告引言:八数码,也被称为滑块拼图,是一种经典的益智游戏。
在这个实验中,我们将探索八数码问题的解决方案,并分析其算法的效率和复杂性。
通过这个实验,我们可以深入了解搜索算法在解决问题中的应用,并且探讨不同算法之间的优劣势。
1. 问题描述:八数码问题是一个在3x3的方格上进行的拼图游戏。
方格中有8个方块,分别标有1到8的数字,还有一个空方块。
游戏的目标是通过移动方块,将它们按照从左上角到右下角的顺序排列。
2. 算法一:深度优先搜索(DFS)深度优先搜索是一种经典的搜索算法,它从初始状态开始,不断地向前搜索,直到找到目标状态或者无法继续搜索为止。
在八数码问题中,深度优先搜索会尝试所有可能的移动方式,直到找到解决方案。
然而,深度优先搜索在解决八数码问题时存在一些问题。
由于搜索的深度可能非常大,算法可能会陷入无限循环,或者需要很长时间才能找到解决方案。
因此,在实际应用中,深度优先搜索并不是最优的选择。
3. 算法二:广度优先搜索(BFS)广度优先搜索是另一种常用的搜索算法,它从初始状态开始,逐层地向前搜索,直到找到目标状态。
在八数码问题中,广度优先搜索会先尝试所有可能的一步移动,然后再尝试两步移动,依此类推,直到找到解决方案。
与深度优先搜索相比,广度优先搜索可以保证找到最短路径的解决方案。
然而,广度优先搜索的时间复杂度较高,尤其是在搜索空间较大时。
因此,在实际应用中,广度优先搜索可能不太适合解决八数码问题。
4. 算法三:A*算法A*算法是一种启发式搜索算法,它在搜索过程中利用了问题的启发信息,以提高搜索效率。
在八数码问题中,A*算法会根据每个状态与目标状态之间的差异,选择最有可能的移动方式。
A*算法通过综合考虑每个状态的实际代价和启发式估计值,来评估搜索路径的优劣。
通过选择最优的路径,A*算法可以在较短的时间内找到解决方案。
然而,A*算法的实现较为复杂,需要合适的启发函数和数据结构。
八数码实验报告

八数码实验报告实验名称:八数码实验目的:通过使用搜索算法和启发式算法,解决八数码问题,深入理解搜索算法原理和应用。
实验环境:使用Python语言进行编程实现,操作系统为Windows。
实验过程:1. 定义八数码问题的状态和目标状态,分别以列表的形式表示。
* 初始状态:[2, 8, 3, 1, 6, 4, 7, 0, 5]* 目标状态:[1, 2, 3, 8, 0, 4, 7, 6, 5]2. 实现深度优先搜索算法,运行程序得到结果。
通过深度优先搜索算法,得到了八数码问题的解法。
但是,由于深度优先搜索算法过于盲目,搜索时间过长,而且容易陷入无解状态,因此需要改进算法。
3. 改进算法——广度优先搜索。
在深度优先搜索的基础上,改用广度优先搜索算法,实现代码如下:```def bfs(start, target):queue = [(start, [start])]seen = {tuple(start)}while queue:node, path = queue.pop(0)for move, i in direction.items():new_node = [j for j in node]if i not in range(0, 9):continuenew_node[0], new_node[i] = new_node[i], new_node[0] if tuple(new_node) in seen:continueif new_node == target:return path + [new_node]seen.add(tuple(new_node))queue.append((new_node, path + [new_node]))```4. 改进算法——A*算法。
在广度优先搜索的基础上,使用A*算法进行优化。
进行了以下改进:* 引入估价函数,加快搜索速度;* 遍历过程中对结点进行评估,保留最优的结点。
八数码问题

+0*6!+
3*7!+(98)*
8!=
55596<9!
具体的原因可以去查查一些数学书,其中
123456789的哈希值是
0最小,876543210
的哈希值是(9!1)
最大,而其他值都在
0到(
9!1)
中,且均唯一。
Q5:如何使搜索只求得最佳的解?
要寻找这一系列中间状态的方法是搜索,但搜索很容易遇到时间和空间上的问题。以下就是搜
索的基本原理:
由
137246852状态可以衍生三个状态,假如选择
了
123746855,则又衍生三个状态,继续按某策略进
行选择,一直到衍生出的新状态为目标状态
END为止。
容易看出,这样的搜索类似于从树根开始向茎再向叶
括两步操作
ld,可能与平时玩这类游戏的习惯不符合,但这是为了和
ACM例题相统一。
对应地,每种操作引起的状态变化如下:
r:num值++
l:num值u:
有点复杂
int
t0=
9num%
10+
1
int
t1=
num/1e(t0)
int
t2=
t1%1000
END,所以优先级高。
在计算
difference和
manhattan时,推荐都将空格忽略,因为在
difference中空格可有可无,对整
体搜索影响不大。
考虑下面两个状态(左需要
3步到达
END态,右需要
4步到达
八数码 人工智能实验报告

八数码人工智能实验报告八数码人工智能实验报告引言:八数码是一种经典的数学问题,也是人工智能领域中常用的实验题目之一。
本次实验旨在通过使用搜索算法解决八数码问题,探讨人工智能在解决复杂问题上的应用。
一、问题描述:八数码问题是一种数字排列游戏,使用一个3x3的方格,其中8个方格上各有一个数字,剩下一个方格为空白。
通过移动数字方格,最终将数字按照从小到大的顺序排列,空白方格位于最后一个位置。
例如,初始状态为:1 2 38 47 6 5目标状态为:1 2 34 5 67 8二、算法选择:本次实验采用了A*搜索算法来解决八数码问题。
A*算法是一种启发式搜索算法,通过估计每个搜索节点到达目标状态的代价来进行搜索。
它综合了广度优先搜索和最佳优先搜索的优点,能够高效地找到最优解。
三、实验过程:1. 状态表示:在实验中,我们使用一个3x3的二维数组来表示八数码的状态。
数组中的每个元素代表一个方格的数字,空白方格用0表示。
2. 启发函数:为了评估每个搜索节点到达目标状态的代价,我们需要定义一个启发函数。
本实验中,我们选择了曼哈顿距离作为启发函数。
曼哈顿距离是指每个数字方格与其目标位置之间的水平和垂直距离之和。
3. A*算法:A*算法的核心思想是维护一个优先队列,根据每个搜索节点的估价函数值进行排序。
具体步骤如下:- 将初始状态加入优先队列,并设置初始估价函数值为0。
- 从优先队列中取出估价函数值最小的节点,进行扩展。
- 对于每个扩展节点,计算其估价函数值,并将其加入优先队列。
- 重复上述步骤,直到找到目标状态或者队列为空。
四、实验结果:经过实验,我们发现A*算法能够高效地解决八数码问题。
对于初始状态为随机排列的八数码,A*算法能够在较短的时间内找到最优解。
实验结果表明,A*算法在解决八数码问题上具有较好的性能。
五、实验总结:本次实验通过使用A*搜索算法解决八数码问题,展示了人工智能在解决复杂问题上的应用。
A*算法通过合理的启发函数和优先队列的维护,能够高效地找到最优解。
a算法求解八数码问题 实验报告
题目: a算法求解八数码问题实验报告目录1. 实验目的2. 实验设计3. 实验过程4. 实验结果5. 实验分析6. 实验总结1. 实验目的本实验旨在通过实验验证a算法在求解八数码问题时的效果,并对其进行分析和总结。
2. 实验设计a算法是一种启发式搜索算法,主要用于在图形搜索和有向图中找到最短路径。
在本实验中,我们将使用a算法来解决八数码问题,即在3x3的九宫格中,给定一个初始状态和一个目标状态,通过移动数字的方式将初始状态转变为目标状态。
具体的实验设计如下:1) 实验工具:我们将使用编程语言来实现a算法,并结合九宫格的数据结构来解决八数码问题。
2) 实验流程:我们将设计一个初始状态和一个目标状态,然后通过a 算法来求解初始状态到目标状态的最短路径。
在求解的过程中,我们将记录下每一步的状态变化和移动路径。
3. 实验过程我们在编程语言中实现了a算法,并用于求解八数码问题。
具体的实验过程如下:1) 初始状态和目标状态的设计:我们设计了一个初始状态和一个目标状态,分别为:初始状态:1 2 34 5 67 8 0目标状态:1 2 38 0 42) a算法求解:我们通过a算法来求解初始状态到目标状态的最短路径,并记录下每一步的状态变化和移动路径。
3) 实验结果在实验中,我们成功求解出了初始状态到目标状态的最短路径,并记录下了每一步的状态变化和移动路径。
具体的实验结果如下:初始状态:1 2 34 5 67 8 0目标状态:1 2 38 0 47 6 5求解路径:1. 上移1 2 37 8 62. 左移1 2 3 4 0 5 7 8 63. 下移1 2 3 4 8 5 7 0 64. 右移1 2 3 4 8 5 0 7 65. 上移1 2 3 0 8 5 4 7 61 2 38 0 54 7 67. 下移1 2 38 7 54 0 68. 右移1 2 38 7 54 6 0共计8步,成功从初始状态到目标状态的最短路径。
八数码问题人工智能实验报告

基于人工智能的状态空间搜索策略研究——八数码问题求解(一)实验软件或编程语言或其它编程语言(二)实验目的1. 熟悉人工智能系统中的问题求解过程;2. 熟悉状态空间的盲目搜索和启发式搜索算法的应用;3. 熟悉对八数码问题的建模、求解及编程语言的应用。
(三)需要的预备知识1. 熟悉或编程语言或者其它编程语言;2. 熟悉状态空间的宽度优先搜索、深度优先搜索和启发式搜索算法;3. 熟悉计算机语言对常用数据结构如链表、队列等的描述应用;4. 熟悉计算机常用人机接口设计。
(四)实验数据及步骤1. 实验内容八数码问题:在3×3的方格棋盘上,摆放着1到8这八个数码,有1个方格是空的,其初始状态如图1所示,要求对空格执行空格左移、空格右移、空格上移和空格下移这四个操作使得棋盘从初始状态到目标状态。
437465图1 八数码问题示意图请任选一种盲目搜索算法(深度优先搜索或宽度优先搜索)或任选一种启发式搜索方法(A 算法或 A* 算法)编程求解八数码问题(初始状态任选),并对实验结果进行分析,得出合理的结论。
2. 实验步骤(1)分析算法基本原理和基本流程;程序采用宽度优先搜索算法,基本流程如下:(2)确定对问题描述的基本数据结构,如 Open 表和 Closed 表等;(3)编写算符运算、目标比较等函数;(4)编写输入、输出接口;(5)全部模块联调;(6)撰写实验报告。
(五)实验报告要求所撰写的实验报告必须包含以下内容:1. 算法基本原理和流程框图;2. 基本数据结构分析和实现;3. 编写程序的各个子模块,按模块编写文档,含每个模块的建立时间、功能、输入输出参数意义和与其它模块联系等;4. 程序运行结果,含使用的搜索算法及搜索路径等;5. 实验结果分析;6. 结论;7. 提供全部源程序及软件的可执行程序。
附:实验报告格式一、实验问题二、实验目的三、实验原理四、程序框图五、实验结果及分析六、结论。
人工智能实验报告,包括八数码问题八皇后问题和tsp问题
八数码问题(一)问题描述在一个3*3的方棋盘上放置着1,2,3,4,5,6,7,8八个数码,每个数码占一格,且有一个空格。
这些数码可以在棋盘上移动,其移动规则是:与空格相邻的数码方格可以移入空格。
现在的问题是:对于指定的初始棋局和目标棋局,给出数码的移动序列。
该问题称八数码难题或者重排九宫问题。
(二)问题分析八数码问题是个典型的状态图搜索问题。
搜索方式有两种基本的方式,即树式搜索和线式搜索。
搜索策略大体有盲目搜索和启发式搜索两大类。
盲目搜索就是无“向导”的搜索,启发式搜索就是有“向导”的搜索。
1、启发式搜索由于时间和空间资源的限制,穷举法只能解决一些状态空间很小的简单问题,而对于那些大状态空间的问题,穷举法就不能胜任,往往会导致“组合爆炸”。
所以引入启发式搜索策略。
启发式搜索就是利用启发性信息进行制导的搜索。
它有利于快速找到问题的解。
由八数码问题的部分状态图可以看出,从初始节点开始,在通向目标节点的路径上,各节点的数码格局同目标节点相比较,其数码不同的位置个数在逐渐减少,最后为零。
所以,这个数码不同的位置个数便是标志一个节点到目标节点距离远近的一个启发性信息,利用这个信息就可以指导搜索。
即可以利用启发信息来扩展节点的选择,减少搜索范围,提高搜索速度。
启发函数设定。
对于八数码问题,可以利用棋局差距作为一个度量。
搜索过程中,差距会逐渐减少,最终为零,为零即搜索完成,得到目标棋局。
(三)数据结构与算法设计该搜索为一个搜索树。
为了简化问题,搜索树节点设计如下:struct Chess//棋盘{int cell[N][N];//数码数组int Value;//评估值Direction BelockDirec;//所屏蔽方向struct Chess * Parent;//父节点};int cell[N][N]; 数码数组:记录棋局数码摆放状态。
int Value; 评估值:记录与目标棋局差距的度量值。
Direction BelockDirec; 所屏蔽方向:一个屏蔽方向,防止回推。
八数码问题实验报告

八数码问题实验报告八数码问题实验报告引言:八数码问题,也被称为九宫格问题,是一种经典的数学谜题。
在一个3x3的方格中,摆放有1至8的数字,其中一个位置为空。
目标是通过交换数字的位置,将数字按照从小到大的顺序排列,最终使得空格位于最后一个位置。
本实验旨在通过编程实现八数码问题的求解,并探讨不同算法在解决该问题上的效果和优劣。
实验步骤:1. 算法选择在本次实验中,我们选择了广度优先搜索算法和A*算法作为求解八数码问题的两种不同方法。
广度优先搜索算法是一种盲目搜索算法,它通过逐层扩展搜索树,直到找到目标状态。
而A*算法则是一种启发式搜索算法,它结合了广度优先搜索和启发式函数,通过评估每个状态的代价来指导搜索过程,以找到最优解。
2. 算法实现我们使用Python语言实现了以上两种算法。
首先,我们定义了一个表示状态的类,并实现了状态的初始化、移动、判断是否达到目标状态等基本操作。
然后,我们分别编写了广度优先搜索算法和A*算法的求解函数。
在广度优先搜索算法中,我们使用队列数据结构来保存待扩展的状态,以实现逐层扩展的效果;在A*算法中,我们使用优先队列来保存待扩展的状态,并根据启发式函数的值进行优先级排序。
3. 实验结果我们使用了多个测试样例来验证两种算法的求解效果。
实验结果表明,广度优先搜索算法能够找到解,但是在面对状态空间较大的情况下,搜索时间会呈指数级增长。
而A*算法则能够更快地找到最优解,其效率相对较高。
然而,A*算法需要选择合适的启发式函数,并且对于某些特殊情况,可能会陷入局部最优解而无法找到最优解。
4. 结果分析通过对比两种算法的求解结果,我们可以发现广度优先搜索算法和A*算法在时间效率和解的质量上存在一定的差异。
广度优先搜索算法适用于状态空间较小的情况,但是在状态空间较大时效率较低;而A*算法则能够在较短的时间内找到最优解,但需要对问题进行合理的建模和启发式函数的选择。
因此,在实际应用中,我们需要根据问题的规模和特点来选择合适的算法。
八数码(双向搜索)解题报告

a)广搜的优化:用布尔数组、哈希表、二叉排序树等提高判重效率,用双向搜索、滚动数组改善空间效率,用二进制改进产生式、存储空间以及判重效率例题:【问题描述】:在3 * 3 的棋盘上,摆有八个棋子,每个棋子上标有1 至8 的某一数字。
棋盘中留有一个空格。
空格周围的棋子可以移到空格中。
要求解的问题是,给出一种初始布局[ 初始状态] 和目标布局[ 目标状态] ,输出从初始布局到目标布局的转变至少需要的步数。
【输入格式】输入由两行组成,每行8个数,分别表示初始状态和目标状态:【输出格式】输出步数,若无解输出“No solution!”。
【输入输出样例】输入文件名:8num.in283164705123804765输出文件名:8num.out5时限:前两组数据不超过1秒,第三组数据不超过10秒program shuangguang8; {Made By P.D.B (AYLA)}{此程序可全部AC,用时0 ms}const ji:array[1..8]of longint=(40320,5040,720,120,24,6,2,1);{康托展开时用到的常数,分别为为9-1的阶乘}var d1,d2:array[0..10000]of string[10];{两个队,分别存放双向广搜的一支} k1,k2:array[0..370000]of boolean;{Hash表,康托展开的数组,判重用}kb1,kb2:array[0..370000]of integer;{Hash表,康托展开的数组,存放每种情况的步数}fu1,fu2:array[0..10000]of integer;{两个队,存放当前步数}w1,w2,h1,t1,h2,t2,i,j,tol,lei,b:longint;m,n,z:string[10];l,c:char;{辅助变量} procedure print;{输出}beginwriteln(kb1[lei]+kb2[lei]);{从起始到当前情况与从目标到当前情况的步数和} halt;end;function PDhash1(x:string):boolean;{判断当前情况在队列1中是否重复}beginlei:=0;for i:=8 downto 1 do {康托展开,i表示当前位数}begintol:=0;for j:=i to 9 do {将当前位数前比当前位数大的数的个数与当前位数的阶乘相乘,并累加到l变量lei中}if x[i]>x[j] then inc(tol);lei:=lei+ji[i]*tol;end;PDhash1:=k1[lei];end;function PDhash2(x:string):boolean;{判断当前情况在队列2中是否重复}beginlei:=0;for i:=8 downto 1 dobegintol:=0;for j:=i to 9 doif x[i]>x[j] then inc(tol);lei:=lei+ji[i]*tol;end;PDhash2:=k2[lei];end;procedure hash1(x:string[10]);{将当前情况加入到队列1的Hash表中,可与PDhash1过程合并,为便于理解将其分开}beginlei:=0;for i:=8 downto 1 dobegintol:=0;for j:=i to 9 doif x[i]>x[j] then inc(tol);lei:=lei+ji[i]*tol;end;k1[lei]:=true;kb1[lei]:=fu1[t1]; {将当前步数存入康托展开后的数组中}if k2[lei] then print; {如果反向搜索状态中由此情况,则输出,并结束程序} end;procedure hash2(x:string[10]);{将当前情况加入到队列2的Hash表中,可与PDhash2过程合并,为便于理解将其分开}beginlei:=0;for i:=8 downto 1 dobegintol:=0;for j:=i to 9 doif x[i]>x[j] then inc(tol);lei:=lei+ji[i]*tol;end;k2[lei]:=true;kb2[lei]:=fu2[t2]; {将当前步数存入康托展开后的数组中}if k1[lei] then print; {如果正向搜索状态中由此情况,则输出,并结束程序} end;procedure init;{读入}beginfillchar(k1,sizeof(k1),false);fillchar(k2,sizeof(k2),false);{for i:=1 to 3 dobeginfor j:=1 to 3 dobeginread(c); m:=m+c; read(c);end;readln;end;}m:='123456780';for i:=1 to 3 dobeginfor j:=1 to 3 dobeginread(c); n:=n+c; read(c);end;readln;end;end;procedure WFS;{双向广搜}begint1:=1;t2:=1;h1:=0;h2:=0;repeatinc(h1); {正向搜索}w1:=pos('0',d1[h1]);if w1-3>0 then {查找'0'的位置,判断'0'可移动的方向}beginz:=d1[h1];l:=z[w1];z[w1]:=z[w1-3];z[w1-3]:=l;{移动'0'}if not PDhash1(z) then {判断是否重复}begininc(t1); d1[t1]:=z;fu1[t1]:=fu1[h1]+1; {当前情况步数等于其父节点的步数加1}hash1(z); {加入Hash表}end;end;if w1+3<10 thenbeginz:=d1[h1];l:=z[w1];z[w1]:=z[w1+3];z[w1+3]:=l;if not PDhash1(z) thenbegininc(t1); d1[t1]:=z;fu1[t1]:=fu1[h1]+1;hash1(z);end;end;case w1 mod 3 of {判断'0'可移动的方向}0: beginz:=d1[h1];l:=z[w1];z[w1]:=z[w1-1];z[w1-1]:=l;if not PDhash1(z) thenbegininc(t1); d1[t1]:=z;fu1[t1]:=fu1[h1]+1;hash1(z);end;end;1: beginz:=d1[h1];l:=z[w1];z[w1]:=z[w1+1];z[w1+1]:=l;if not PDhash1(z) thenbegininc(t1); d1[t1]:=z;fu1[t1]:=fu1[h1]+1;hash1(z);end;end;2:beginz:=d1[h1];l:=z[w1];z[w1]:=z[w1-1];z[w1-1]:=l;if not PDhash1(z) thenbegininc(t1); d1[t1]:=z;fu1[t1]:=fu1[h1]+1;hash1(z);end;z:=d1[h1];l:=z[w1];z[w1]:=z[w1+1];z[w1+1]:=l;if not PDhash1(z) thenbegininc(t1);d1[t1]:=z;fu1[t1]:=fu1[h1]+1;hash1(z);end;end;end;inc(h2);{反向搜索,过程与正向搜索基本相同}w1:=pos('0',d2[h2]);if w1-3>0 thenbeginz:=d2[h2];l:=z[w1];z[w1]:=z[w1-3];z[w1-3]:=l;if not PDhash2(z) thenbegininc(t2);d2[t2]:=z;fu2[t2]:=fu2[h2]+1;hash2(z);end;end;if w1+3<10 thenbeginz:=d2[h2];l:=z[w1];z[w1]:=z[w1+3];z[w1+3]:=l;if not PDhash2(z) thenbegininc(t2);d2[t2]:=z;fu2[t2]:=fu2[h2]+1;hash2(z);end;end;case w1 mod 3 of0: beginz:=d2[h2];l:=z[w1];z[w1]:=z[w1-1];z[w1-1]:=l;if not PDhash2(z) thenbegininc(t2);d2[t2]:=z;fu2[t2]:=fu2[h2]+1;hash2(z);end;end;1: beginz:=d2[h2];l:=z[w1];z[w1]:=z[w1+1];z[w1+1]:=l;if not PDhash2(z) thenbegininc(t2); d2[t2]:=z;fu2[t2]:=fu2[h2]+1;hash2(z);end;end;2:beginz:=d2[h2];l:=z[w1];z[w1]:=z[w1-1];z[w1-1]:=l;if not PDhash2(z) thenbegininc(t2); d2[t2]:=z;fu2[t2]:=fu2[h2]+1;hash2(z);end;z:=d2[h2];l:=z[w1];z[w1]:=z[w1+1];z[w1+1]:=l;if not PDhash2(z) thenbegininc(t2); d2[t2]:=z;fu2[t2]:=fu2[h2]+1;hash2(z);end;end;end;until (h2>=t2)or(h1>=t1);end;begin {主程序,十分简洁}init;d1[1]:=m; {初始化,队中存入起始状态}d2[1]:=n; {初始化,队中存入目标状态}hash1(m);hash2(n);WFS;writeln('Impossible'); {无解则输出Impossible} end.。
人工智能实验报告 八数码问题
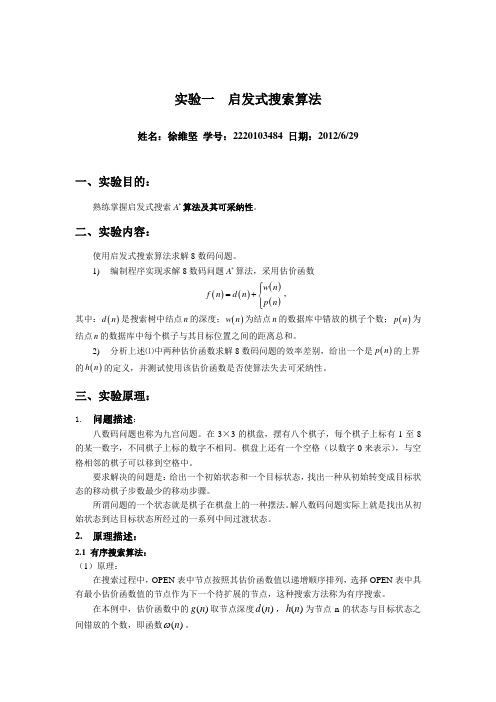
实验一 启发式搜索算法姓名:徐维坚 学号:2220103484 日期:2012/6/29一、实验目的:熟练掌握启发式搜索A *算法及其可采纳性。
二、实验内容:使用启发式搜索算法求解8数码问题。
1) 编制程序实现求解8数码问题A *算法,采用估价函数()()()()w n f n d n p n ⎧⎪=+⎨⎪⎩, 其中:()d n 是搜索树中结点n 的深度;()w n 为结点n 的数据库中错放的棋子个数;()p n 为结点n 的数据库中每个棋子与其目标位置之间的距离总和。
2) 分析上述⑴中两种估价函数求解8数码问题的效率差别,给出一个是()p n 的上界 的()h n 的定义,并测试使用该估价函数是否使算法失去可采纳性。
三、实验原理:1. 问题描述:八数码问题也称为九宫问题。
在3×3的棋盘,摆有八个棋子,每个棋子上标有1至8的某一数字,不同棋子上标的数字不相同。
棋盘上还有一个空格(以数字0来表示),与空格相邻的棋子可以移到空格中。
要求解决的问题是:给出一个初始状态和一个目标状态,找出一种从初始转变成目标状态的移动棋子步数最少的移动步骤。
所谓问题的一个状态就是棋子在棋盘上的一种摆法。
解八数码问题实际上就是找出从初始状态到达目标状态所经过的一系列中间过渡状态。
2. 原理描述:2.1 有序搜索算法:(1)原理:在搜索过程中,OPEN 表中节点按照其估价函数值以递增顺序排列,选择OPEN 表中具有最小估价函数值的节点作为下一个待扩展的节点,这种搜索方法称为有序搜索。
在本例中,估价函数中的)(n g 取节点深度)(n d ,)(n h 为节点n 的状态与目标状态之间错放的个数,即函数)(n ω。
(2)算法描述:① 把起始节点S 放到OPEN 表中,并计算节点S 的)(S f ;② 如果OPEN 是空表,则失败退出,无解;③ 从OPEN 表中选择一个f 值最小的节点i 。
如果有几个节点值相同,当其中有一个 为目标节点时,则选择此目标节点;否则就选择其中任一个节点作为节点i ;④ 把节点i 从 OPEN 表中移出,并把它放入 CLOSED 的已扩展节点表中;⑤ 如果i 是个目标节点,则成功退出,求得一个解;⑥ 扩展节点i ,生成其全部后继节点。
八数码问题实验报告
八数码问题实验报告引言八数码问题是一个著名的数学问题,也是一个经典的搜索算法应用场景。
该问题是在一个3x3的棋盘上,分布着1至8这8个数字,其中一个格子是空白的。
目标是通过交换棋盘上的数字,使得棋盘上的数字按照从小到大的顺序排列,空白格子位于最后。
本实验报告将介绍八数码问题的背景、具体实验步骤以及实验结果分析。
实验步骤1.定义状态空间和目标状态:将八数码问题抽象成一个状态空间图。
每个状态表示一个棋盘布局,目标状态是数字按照从小到大的顺序排列,空白格子位于最后。
2.实现状态的表示:使用一个3x3的二维数组来表示棋盘状态,空白格子用0表示。
3.实现状态转移函数:定义合法的移动操作,例如将一个数字移动到空白格子的位置。
根据当前状态和移动操作,得到下一个状态。
4.实现启发式函数:设计一个启发式函数来评估当前状态和目标状态之间的距离。
常用的启发式函数有曼哈顿距离和错位数。
5.实现搜索算法:选择合适的搜索算法,例如A算法或IDA算法。
根据当前状态和目标状态,通过搜索算法找到最优解。
6.实验结果分析:运行实验程序,记录搜索所需的时间和搜索路径长度。
分析不同启发式函数和搜索算法对实验结果的影响。
实验结果分析本次实验中,我们选择了A*算法作为搜索算法,曼哈顿距离作为启发式函数。
经过多次实验,我们发现实验结果受到初始状态的影响较大。
对于某些初始状态,搜索算法可以在较短的时间内找到最优解,而对于其他初始状态,搜索时间较长。
这是因为八数码问题的状态空间非常庞大,搜索算法需要遍历大量的状态才能找到最优解。
另外,我们还发现启发式函数的选择对搜索效率有一定的影响。
曼哈顿距离作为一种常用的启发式函数,可以提供较好的搜索效果。
而对于某些特定的初始状态,如果选择了错误的启发式函数,可能会导致搜索算法无法找到最优解。
在实验过程中,我们还发现A算法在某些情况下会陷入局部最优解,而无法找到全局最优解。
这是因为A算法的搜索过程是基于启发式函数的估计值,存在一定的不确定性。
八数码问题报告

⼋数码问题报告⼋数码问题分析班级:计算机1041学号:01姓名:李守先2013年9⽉26⽇摘要⼋数码问题(Eight-puzzle Problem )是⼈⼯智能中⼀个很典型的智⼒问题。
本⽂以状态空间搜索的观点讨论了⼋数码问题,给出了⼋数码问题的Java 算法与实现的思想, 分析了A*算法的可采纳性等及系统的特点。
关键词九宫重排, 状态空间, 启发式搜索, A*算法1 引⾔九宫重排问题(即⼋数码问题)是⼈⼯智能当中有名的难题之⼀。
问题是在3×3⽅格盘上,放有⼋个数码,剩下⼀个位置为空,每⼀空格其上下左右的数码可移⾄空格。
问题给定初始位置和⽬标位置,要求通过⼀系列的数码移动,将初始状态转化为⽬标状态。
状态转换的规则:空格周围的数移向空格,我们可以看作是空格移动,它最多可以有4个⽅向的移动,即上、下、左、右。
九宫重排问题的求解⽅法,就是从给定的初始状态出发,不断地空格上下左右的数码移⾄空格,将⼀个状态转化成其它状态,直到产⽣⽬标状态。
图1许多学者对该问题进⾏了有益的探索[1,2,4,6]。
给定初始状态,9个数在3×3中的放法共有9!=362880种,其状态空间是相当⼤的。
因此, 有必要考虑与问题相关的启发性信息来指导搜索,以提⾼搜索的效率。
当然,还有个很重要的问题:每个初始状态都存在解路径吗?⽂献给出了九宫重排问题是否有解的判别⽅法:九宫重排问题存在⽆解的情况,当遍历完所有可扩展的状态也没有搜索到⽬标状态就判断为⽆解。
可以根据状态的逆序数来先验的判断是否有解,当初始状态的逆序数和⽬标状态的逆序数的奇偶性相同时,问题有解;否则问题⽆解。
状态的逆序数是定义把三⾏数展开排成⼀⾏,并且丢弃数字 0 不计⼊其中,ηi 是第 i 个数之前⽐该数⼩的数字的个数,则η=Σηi 是该状态的逆序数,图2说明了逆序数计算的过程。
本⽂介绍⽤JAVA 编写九宫重排问题游戏。
游戏规则是,可随机产⽣或由⽤户设置初始状态,由初始状态出发,不断地在空格上下左右的数码移⾄空格,若能排出⽬标状态,则成功。
人工智能实验报告 八数码
人工智能实验报告八数码人工智能实验报告八数码引言:人工智能(Artificial Intelligence,简称AI)作为一门前沿的学科,已经在各个领域展现出了巨大的应用潜力。
其中,八数码问题作为一个经典的算法问题,被广泛应用于人工智能领域。
本文将对八数码问题进行实验研究,探讨其在人工智能中的应用。
一、八数码问题的定义八数码问题是指在一个3x3的棋盘上,摆放有1至8这8个数字,其中一个格子为空。
玩家需要通过移动数字,使得棋盘上的数字按照从小到大的顺序排列,空格在最后。
八数码问题可以被抽象为一个搜索问题,即找到从初始状态到目标状态的最短路径。
二、实验方法为了解决八数码问题,我们采用了A*算法作为实验方法。
A*算法是一种启发式搜索算法,通过估计目标状态与当前状态之间的代价函数,选择最优的路径进行搜索。
在本次实验中,我们将使用曼哈顿距离作为代价函数进行搜索。
三、实验结果我们使用Python编程语言实现了八数码问题的求解算法,并进行了多组实验。
实验结果表明,A*算法在解决八数码问题上表现出了较好的效果。
在大部分情况下,A*算法能够在较短的时间内找到最优解。
四、实验讨论尽管A*算法在解决八数码问题上表现出了较好的效果,但我们也发现了一些问题。
首先,A*算法在面对复杂的八数码问题时,搜索时间会显著增加。
其次,A*算法在面对某些特定情况时,可能会陷入局部最优解,无法找到全局最优解。
这些问题需要进一步的研究和改进。
五、应用前景八数码问题作为人工智能领域的经典问题,有着广泛的应用前景。
首先,八数码问题可以被应用于游戏设计中,作为一种智能对手的算法。
其次,八数码问题的解决方法可以被应用于路径规划、图像识别等领域,提高算法的效率和准确性。
六、结论通过本次实验,我们对八数码问题进行了深入的研究和探讨。
A*算法作为一种启发式搜索算法,在解决八数码问题上表现出了较好的效果。
然而,八数码问题仍然存在一些挑战和问题,需要进一步的研究和改进。
八数码问题-实验报告(含源码)

人工智能基础实验报告题目:八数码问题一、内容 (2)二、目的 (2)三、实验设计思想和流程 (2)四、主要数据结构及符号说明 (3)五、程序初值及运行结果 (5)附录(源代码及注释) (6)一、内容八数码问题由8个编号1~8并放在3*3方格棋盘上的可走动的棋子组成。
棋盘上有一个格是空的,以便可以让空格周围的棋子走进空格,这也可以理解为移动空格。
给出起始状态和目标状态。
用A*算法求解出移动的路径。
二、目的1、学会用状态空间法来进行知识表示2、理解A*算法三、实验设计思想和流程1.八数码问题的状态表示八数码问题的一个状态就是八个数字在棋盘上的一种放法。
每个棋子用它上面所标的数字表示,并用0表示空格,这样就可以将棋盘上棋子的一个状态存储在一个二维数组中。
2、结点扩展规则搜索就是按照一定规则扩展已知结点,直到找到目标结点或所有结点都不能扩展为止。
八数码问题的结点扩展应当遵守棋子的移动规则。
按照棋子移动的规则,每一次可以将一个与空格相邻棋子移动到空格中,实际上可以看作是空格作相反移动。
空格移动的方向可以是右、下、左、上,当然不能移出边界。
3、A*算法A*算法是一种常用的启发式搜索算法。
在A*算法中,一个结点位置的好坏用估价函数来对它进行评估。
A*算法的估价函数可表示为:f'(n) = g'(n) + h'(n)这里,f'(n)是估价函数,g'(n)是起点到终点的最短路径值(也称为最小耗费或最小代价),h'(n)是n到目标的最短路经的启发值。
由于这个f'(n)其实是无法预先知道的,所以实际上使用的是下面的估价函数:f(n) = g(n) + h(n)其中g(n)是从初始结点到节点n的实际代价,h(n)是从结点n到目标结点的最佳路径的估计代价。
在这里主要是h(n)体现了搜索的启发信息,因为g(n)是已知的。
用f(n)作为f'(n)的近似,也就是用g(n)代替g'(n),h(n)代替h'(n)。
八数码问题,实验报告
八数码问题,实验报告八数码实验报告利用人工智能技术解决八数码游戏问题1.八数码游戏问题简介九宫排字问题(又称八数码问题)是人工智能当中有名的难题之一。
问题是在3×3方格盘上,放有八个数码,剩下第九个为空,每一空格其上下左右的数码可移至空格。
问题给定初始位置和目标位置,要求通过一系列的数码移动,将初始位置转化为目标位置。
2.八数码游戏问题的状态空间法表示①建立一个只含有初始节点S0的搜索图G,把S0放入OPEN表中②建立CLOSED表,且置为空表③判断OPEN表是否为空表,若为空,则问题无解,退出④选择OPEN表中的第一个节点,把它从OPEN表移出,并放入CLOSED表中,将此节点记为节点n⑤考察节点n是否为目标节点,若是,则问题有解,成功退出。
问题的解就是沿着n到S0的路径得到。
若不是转⑥⑥扩展节点n生成一组不是n的祖先的后继节点,并将它们记为集合M,将M中的这些节点作为n的后继节点加入图G中⑦对未在G中出现过的(OPEN和CLOSED表中未出现过的)集合M中的节点, 设置一个指向父节点n的指针,并把这些节点放入OPEN表中;对于已在G中出现过的M中的节点,确定是否需要修改指向父节点的指针;对于已在G中出现过并已在closed表中的M中的节点,确定是否需要修改通向他们后继节点的指针。
⑧按某一任意方式或某种策略重排OPEN表中节点的顺序⑨转③3.八数码游戏问题的盲目搜索技术宽度优先搜索:1、定义如果搜索是以接近起始节点的程度依次扩展节点的,那么这种搜索就叫做宽度优先搜索(breadth-first search)。
2、特点这种搜索是逐层进行的;在对下一层的任一节点进行搜索之前,必须搜索完本层的所有节点。
3、宽度优先搜索算法(1) 把起始节点放到OPEN表中(如果该起始节点为一目标节点,则求得一个解答)。
(2) 如果OPEN是个空表,则没有解,失败退出;否则继续。
(3) 把第一个节点(节点n)从OPEN表移出,并把它放入CLOSED 的扩展节点表中。
人工智能实验报告-八数码(五篇模版)

人工智能实验报告-八数码(五篇模版)第一篇:人工智能实验报告-八数码《人工智能》实验一题目实验一启发式搜索算法1.实验内容:使用启发式搜索算法求解8数码问题。
⑴ 编制程序实现求解8数码问题A*算法,采用估价函数⎧⎪w(n),f(n)=d(n)+⎨pn⎪⎩()其中:d(n)是搜索树中结点n的深度;w(n)为结点n的数据库中错放的棋子个数;p(n)为结点n的数据库中每个棋子与其目标位置之间的距离总和。
⑵ 分析上述⑴中两种估价函数求解8数码问题的效率差别,给出一个是p(n)的上界的h(n)的定义,并测试使用该估价函数是否使算法失去可采纳性。
2.实验目的熟练掌握启发式搜索A算法及其可采纳性。
3.数据结构与算法设计该搜索为一个搜索树。
为了简化问题,搜索树节点设计如下:typedef struct Node//棋盘 {//节点结构体int data[9];double f,g;struct Node * parent;//父节点}Node,*Lnode;int data[9];数码数组:记录棋局数码摆放状态。
struct Chess * Parent;父节点:指向父亲节点。
下一步可以通过启发搜索算法构造搜索树。
1、局部搜索树样例:*2、搜索过程搜索采用广度搜索方式,利用待处理队列辅助,逐层搜索(跳过劣质节点)。
搜索过程如下:(1)、把原棋盘压入队列;(2)、从棋盘取出一个节点;(3)、判断棋盘估价值,为零则表示搜索完成,退出搜索;(4)、扩展子节点,即从上下左右四个方向移动棋盘,生成相应子棋盘;(5)、对子节点作评估,是否为优越节点(子节点估价值小于或等于父节点则为优越节点),是则把子棋盘压入队列,否则抛弃;(5)、跳到步骤(2);3、算法的评价完全能解决简单的八数码问题,但对于复杂的八数码问题还是无能为力。
现存在的一些优缺点。
1、可以改变数码规模(N),来扩展成N*N的棋盘,即扩展为N 数码问题的求解过程。
八数码问题实验总结
八数码问题实验总结在这一个学期里,我的专业课知识学得很扎实,也做了很多的实验,在其中有两个实验比较有意义,一个是对八位数码中的0位进行研究;一个是对八位数码中0和1之间的关系进行研究。
这两个实验分别完成了八位数码和一个全数字电路的研究。
通过这次实验使我对数码电路的研究有了进一步的认识也学会了怎样运用这些计算机的知识来解决一些问题。
下面就把这次实验的经验与大家分享一下。
这次实验主要是对全数字电路的研究以及实验使用的实验设备进行了简单的考察。
一、数码电路的研究首先我们来分析一下关于数码电路的问题,在这个实验中,虽然我们对数码电路的概念都很模糊,但是通过这次简单实验,我们可以更清楚的了解0与1之间的关系。
通过实验可以知道,在平时的生活和工作中我们经常用到0和1这个数字,但是如果不能把他们真正的表达出来也会给社会带来一定地不便。
因此就需要将这个数字转换成二进制数来表达出来。
当然了这也是比较复杂的一个过程,在数码电路中有很多种不同类型可以用到这个转换过程,在处理时也需要我们注意它之间的关系。
通过这次实验我明白了原来0和1之间仅仅是在数字与字母进行连接后才表示出来而已!二、数据采集由于有了上述问题的存在,需要进行数据采集。
对于这种情况,一般都需要一台计算机进行操作。
所以使用的仪器设备就是 FLASH主机。
它的优势就是使用简单,也就是成本低!这次实验采用是硬件采集,而不是软件。
在计算机上通过使用模拟输入进行信息数据的采集。
三、编程在整个实验中,我们使用的程序和前面的程序相比有很大的区别。
首先是编程的难度上。
因为我们做任何事情之前都会有一个步骤去做这件事。
在做这个题时我们先要了解一下什么是数字运算律,是指计算机运算方法根据具体情况产生规律或函数所规定的运算规则组成的程序律。
数字运算律包括每一个数组成数字运算律所使用的各种计算方法、计算数据和所用数据产生时所要使用的各种方法。
这其中,所用数据产生时所要采用之所用数据都不是由计算机直接产生或由人自行计算出的,而是由人根据具体情况所采用的数据结构产生在计算机中不同位数所对应而产生。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
八数码问题分析班级:计算机1041学号:01*名:***2013年9月26日摘要八数码问题(Eight-puzzle Problem )是人工智能中一个很典型的智力问题。
本文以状态空间搜索的观点讨论了八数码问题,给出了八数码问题的Java 算法与实现的思想, 分析了A*算法的可采纳性等及系统的特点。
关键词 九宫重排, 状态空间, 启发式搜索, A*算法1 引言九宫重排问题(即八数码问题)是人工智能当中有名的难题之一。
问题是在3×3方格盘上,放有八个数码,剩下一个位置为空,每一空格其上下左右的数码可移至空格。
问题给定初始位置和目标位置,要求通过一系列的数码移动,将初始状态转化为目标状态。
状态转换的规则:空格周围的数移向空格,我们可以看作是空格移动,它最多可以有4个方向的移动,即上、下、左、右。
九宫重排问题的求解方法,就是从给定的初始状态出发,不断地空格上下左右的数码移至空格,将一个状态转化成其它状态,直到产生目标状态。
图1许多学者对该问题进行了有益的探索[1,2,4,6]。
给定初始状态,9个数在3×3中的放法共有9!=362880种,其状态空间是相当大的。
因此, 有必要考虑与问题相关的启发性信息来指导搜索,以提高搜索的效率。
当然,还有个很重要的问题:每个初始状态都存在解路径吗?文献给出了九宫重排问题是否有解的判别方法:九宫重排问题存在无解的情况,当遍历完所有可扩展的状态也没有搜索到目标状态就判断为无解。
可以根据状态的逆序数来先验的判断是否有解,当初始状态的逆序数和目标状态的逆序数的奇偶性相同时,问题有解;否则问题无解。
状态的逆序数是定义把三行数展开排成一行,并且丢弃数字 0 不计入其中,ηi 是第 i 个数之前比该数小的数字的个数,则 η=Σηi 是该状态的逆序数,图2说明了逆序数计算的过程 。
本文介绍用JAVA 编写九宫重排问题游戏。
游戏规则是,可随机产生或由用户设置初始状态,由初始状态出发,不断地在空格上下左右的数码移至空格,若能排出目标状态,则成功。
为了避免对无解节点进行无用搜索,首先对初始节点进行逆序数分析,对有解的节点进行搜索,从而节省了资源,也提高了效率。
本文内容安排: 第2部分介绍几个相关的概念和A*算法以及可采纳性;2 A*算法2.1 相关的概念定义1:状态:是描述问题求解过程中任一时刻状况的数据结构,一般用一组变量的有序组合表示:Sk=(Sk0,Sk1,…)当给每一个分量以确定的值时,就得到了一个具体的状态。
定义2:算符:引起状态中某些分量发生变化,从而使问题由一个状态变为另一个状态的操作称为算符。
定义3:状态空间:由问题的全部状态及一可用算符所构成的集合称为问题的状态空间。
一般用一个三元组表示:(S,F,G)。
其中,S是问题所有初始状态的集合,F是算符的集合,G是问题所有目标状态的集合。
定义4:状态空间图:状态空间的图示形式称为状态空间图,其中,节点表示状态,有向边表示算符。
状态空间搜索的基本思想就是通过搜索引擎寻找一个操作算子的调用序列,使问题从初始状态变迁到目标状态之一,而变迁过程中的状态序列或相应的操作算子调用序列称为从初始状态到目标状态的解路径。
搜索引擎可以设计为任意实现搜索算法的控制系统。
2.2 A*算法以及可采纳性A*算法是一个很重要的启发式搜索算法。
如果一般图搜索过程进行如下限制,则它就成为A*算法:(1)把OPEN表中的节点按估价函数f(x)= g(x)+h(x)的值从小到大进行排序;(2) g(x)是对g*(x)的估计,g(x)0;(3) h(x)是h*(x)的下界,即对所有的x均有:h(x)≤ h*(x)其中,g*(x)是从初始节点到节点x 的最小代价,h*(x)是节点x到目标节点的最小代价,若有多个目标节点,则为其中最小的一个。
定义5:算法的可采纳性(Admissibility)一般来说,对任意一个状态空间图,当从初始节点到目标节点有路径存在时,如果搜索算法能在有限步内找到一条从初始节点到目标节点的最佳路径,并在此路径上结束,则称该搜索算法是可纳的。
A*算法是可纳的,即它能在有限步内终止并找到最优解。
我们分三步用以下三个定理来证明这一结论[1,2]。
定理1:对有限图,如果从初始节点S0到目标节点Sg有路径存在,则算法A*一定成功结束。
证明:首先证明算法必定会结束。
由于搜索图为有限图,如果算法能找到解,则会成功结束;如果算法找不到解,则必然会由于Open表变空而结束。
因此,A*算法必然会结束。
然后证明算法一定会成功结束。
由于至少存在一条由初始节点到目标节点的路径,设此路径S0= n0,n1 ,…,nk =Sg算法开始时,节点n0在Open表中,而且路径中任一节点ni离开Open表后,其后继节点ni+1必然进入Open表,这样,在Open表变为空之前,目标节点必然出现在Open表中。
因此,算法必定会成功结束。
引理1:对无限图,如果从初始节点S0到目标节点Sg有路径存在,且A*算法不终止的话,则从Open表中选出的节点必将具有任意大的f值。
证明:略。
引理2:在A*算法终止前的任何时刻,Open表中总存在节点n’,它是从初始节点S0到目标节点的最佳路径上的一个节点,且满足:f(n’) ≤ f*(S0)证明:略。
定理2对无限图,若从初始节点S0到目标节点t有路径存在,则A*算法必然会结束。
证明:(反证法)假设A*算法不结束,又引理1知Open表中的节点有任意大的f值,这与引理2的结论相矛盾,因此,A*算法只能成功结束。
定理3:A*算法是可采纳的,即若存在从初始节点S0到目标节点Sg的路径,则A*算法必能结束在最佳路径上。
证明:证明过程分以下两步进行:先证明A*算法一定能够终止在某个目标节点上。
由定理1和定理2可知,无论是对有限图还是无限图,A*算法都能够找到某个目标节点而结束。
再证明A*算法只能终止在最佳路径上(反证法)。
假设A*算法未能终止在最佳路径上,而是终止在某个目标节点t处,则有f(t)=g(t)f*(S0)但由引理2可知,在A*算法结束前,必有最佳路径上的一个节点n’在Open 表中,且有f(n’) ≤ f*(S0)f(t),这时,A*算法一定会选择n’来扩展,而不可能选择t,从而也不会去测试目标节点t,这就与假设A*算法终止在目标节点t相矛盾。
因此,A*算法只能终止在最佳路径上。
4.广度优先搜索法的缺点广度优先搜索法在有解的情形总能保证搜索到最短路经,也就是移动最少步数的路径。
但广度优先搜索法的最大问题在于搜索的结点数量太多,因为在广度优先搜索法中,每一个可能扩展出的结点都是搜索的对象。
随着结点在搜索树上的深度增大,搜索的结点数会很快增长,并以指数形式扩张,从而所需的存储空间和搜索花费的时间也会成倍增长。
5.双向广度优先搜索法1.双向广度优先搜索法八数码问题具有可逆性,也就是说,如果可以从一个状态A扩展出状态B,那么同样可以从状态B扩展出状态A,这种问题既可以从初始状态出发,搜索目标状态,也可以从目标状态出发,搜索初始状态。
对这类问题如果采用双向广度优先搜索法,将可以大大节省搜索的时间。
所谓双向广度优先搜索法,是同时从初始状态和目标状态出发,采用广度优先搜索的策略,向对方搜索,如果问题存在解,则两个方向的搜索会在中途相遇,即搜索到同一个结点。
将两个方向的搜索路径连接起来,就可以得到从初始结点到目标结点的搜索路径。
2.双向广度优先搜索算法双向广度优先搜索算法的基本步骤如下:1)建立两个队列,一个是正向搜索的队列,另一个是反向搜索的队列。
将初始结点放入正向队列,将目标结点放入反向队列,并设置两个队列的头和尾指针。
2)从正向队列取出队列头(头指针所指)的结点进行扩展。
3)如果扩展出的新结点与队列中的结点重复,则抛弃新结点,跳至第六步。
4)如果扩展出的新结点与队列中的结点不重复,则记录其父结点,并将它加入队列,更新队列尾指针。
5)检查扩展出的结点是否在另一方向的队列中,如果是则两个方向的搜索相遇,显示搜索路径,程序结束。
否则继续下一步。
6)如果队列头的结点还可以扩展,直接返回第二步。
否则将队列头指针指向下一结点,然后对另一方向搜索的队列,按照第二步开始的同样步骤处理。
3.双向广度优先搜索法的优势广度优先搜索法搜索时,结点不断扩张,深度越大,结点数越多。
如果从两个方向向对方搜索,就会在路径中间某个地方相会,这样,双方的搜索的深度都不大,所搜索过的结点数就少得多,搜索时间也就节省不少。
从理论上说,如果每一结点可扩展的子结点数为m,广度优先搜索的搜索树就是一颗m叉树,也就是每个结点都由m个分支。
按完全m叉树计算,如果目标结点在第n层,广度优先搜索就必须在搜索树上扩展完n-1层的所有结点,扩展的结点数为m(mn-1)/(m-1)。
对于双向广度优先搜索来说,如果两个方向的搜索在第i层生成同一子结点,那么正向搜索扩展的结点数为m(mi-1)/(m-1),反向搜索扩展的结点数为m(mn-i-1)/(m-1),搜索的结点总数为m(mi+mn-i-1)/(m-1)(其中n是最优解路径长度,i=(m+1) div 2,)。
设n为偶数(n=2*i),广度优先双向搜索扩展的结点数约是广度优先搜索的2/(mi/2+1)*100%,相对减少(mi/2-1)/(mi/2+1)*100%。
4.判断两个方向的搜索相遇在双向广度优先搜索法中,如何判断两个方向的搜索相遇呢?只要我们在生成结点的同时,判断该结点是否出现在相反方向的搜索树上即可,也就是说,在某个方向搜索中扩展出一个新结点,如果它与另一个方向已扩展出的结点重复,也就找到了解。