单片机原理及应用实验六 按键识别数码管显示实验
数码管显示控制实验原理

数码管显示控制实验原理
嘿,朋友们!今天咱来聊聊数码管显示控制实验原理。
想象一下,数码管就像是一个个小小的窗户,每个窗户里都能显示出不同的数字或符号。
其实啊,这原理就好像是一个聪明的指挥家在控制着一场精彩的灯光秀。
数码管里的每一段就像是一个小灯,通过巧妙地控制这些小灯的亮灭,就能组合出我们想要的数字啦。
比如说,要显示数字“8”,那就得让数码管的所有段都亮起来,就像把所有的灯光都打开,一下子就呈现出一个完整的“8”啦。
而要显示其他数字呢,就按照特定的组合让相应的段亮起来就行。
这就好像我们家里的电灯开关,想开哪个灯就按哪个开关,只不过这里的开关是通过电路和程序来控制的哦。
在实验里,我们就是要搞清楚怎么去设置这些开关,让数码管乖乖地显示出我们想要的东西。
是不是感觉挺有意思的呀?就像是在玩一个超级有趣的电子游戏,只不过这个游戏是关于数字和电路的。
所以,下次当你看到数码管显示出清晰的数字时,就可以想象一下背后那个神奇的“指挥家”是怎么工作的啦!。
按键显示电路实验报告(3篇)

第1篇一、实验目的1. 熟悉按键电路的基本原理和设计方法。
2. 掌握按键电路的搭建和调试方法。
3. 了解按键电路在实际应用中的重要性。
4. 提高动手实践能力和电路分析能力。
二、实验原理按键显示电路是一种将按键输入转换为数字信号,并通过显示设备进行显示的电路。
本实验主要涉及以下原理:1. 按键原理:按键通过机械触点实现电路的通断,当按键被按下时,电路接通,产生一个低电平信号;当按键释放时,电路断开,产生一个高电平信号。
2. 译码电路:将按键输入的信号转换为相应的数字信号,以便后续处理。
3. 显示电路:将数字信号转换为可视化的信息,如LED灯、数码管等。
三、实验器材1. 电路板2. 按键3. 电阻4. LED灯5. 数码管6. 电源7. 基本工具四、实验步骤1. 按键电路搭建(1)根据电路原理图,在电路板上焊接按键、电阻、LED灯等元器件。
(2)连接电源,确保电路板供电正常。
2. 译码电路搭建(1)根据电路原理图,在电路板上焊接译码电路所需的元器件。
(2)连接译码电路与按键电路,确保信号传输正常。
3. 显示电路搭建(1)根据电路原理图,在电路板上焊接显示电路所需的元器件。
(2)连接显示电路与译码电路,确保信号传输正常。
4. 电路调试(1)检查电路连接是否正确,确保无短路、断路等问题。
(2)按下按键,观察LED灯或数码管显示是否正常。
(3)根据需要调整电路参数,如电阻阻值、电源电压等,以达到最佳显示效果。
五、实验结果与分析1. 实验结果通过实验,成功搭建了一个按键显示电路,按下按键后,LED灯或数码管能够正确显示数字信号。
2. 结果分析(1)按键电路能够正常工作,实现电路通断。
(2)译码电路能够将按键输入转换为相应的数字信号。
(3)显示电路能够将数字信号转换为可视化的信息。
六、实验总结1. 通过本次实验,掌握了按键电路的基本原理和设计方法。
2. 提高了动手实践能力和电路分析能力。
3. 了解了按键电路在实际应用中的重要性。
单片机控制装置与调试任务六 数码管显示应用
该数组共有5个元素,每个元素由不同的下标表示,分别为buffer[0],buffer[1],buffer[2],buffer[3]和buffer[4]。
为了稳定发光,再延时一段时间,之后加人熄灭数码管进行消隐,主要防止显示有拖尾现象。
{ cs1=0;cs2=1;
//选中段码锁存IC
for(i=0;i<9;i++)
效,然后送数据,先送段选,然后再送位选,最后CP脉冲高电平使的
数据输出。
2.动态扫描的基本流程 以从高位到低位扫描显示为例, 动态扫描的基本流
程是: (1)送段码
①送最高位的段码到总线。
②拉低cs1,置位cs2。 ③用wr线发送锁存脉冲。 (2)送位码 ①送第七个通道(Q8)位选数据到总线。 ②拉低cs2,置位cs1。 ③同样用wr线发送锁存脉冲。第七个通道(Q8)导通, 第一位数码管点亮。
/例* 8如位,数一码个管3从位左数到字右变依量次tem显p示要“D在n0高L,阻ED1态,七2段,数3码,管4,显×↑,示5其,“6,百7、”十八HH、个个数”字各的个C语位××言上程的序数字*/ 。无无输输出出
port=tab[disbuf[i]];wr=1;wr=0;
//送段码,锁存数据
图5-1所示为常见的各种数码管的外形。
{ while(1)
//while循环
disbuf[1]=tab[1];
//分别为"0、1、2、3、4、5、6、7"
(2) 定义共阳极字形编码表(数字0~9)
在建立数组的时候,注意字型码的排列次序,段码对表头的偏移位置就是该数值的段码,这种排列方法很便于显示数据
因此可将LED各段码与数据位建立如表4-1所示的对应关系。
单片机原理数码管动态显示实验单片机原理实验报告

程序源代码:
1.动态显示法,实现数码管分别显示数字 1-8;
#include<> #define uchar unsigned char #define uint unsigned int uchar code Ledcode[]={
0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
连接图
显示 1-8
时钟自动计时 连接图
红绿灯效果图 1 红绿灯效果图 2
4、创建一个 Keil 应用程序:新建一个工程项目文件;为工程选择目标器件 (AT89C52);为工程项目创建源程序文件并输入程序代码;保存创建的源程 序项目文件;把源程序文件添加到项目中。 5、把用户程序经过编译后生成的 HEX 文件添加到仿真电路中的处理器中(编 辑元件→文件路径) 2 实验程序 <流程图>
指导教师
杨烈君
实验日期
实验目的: 1. 巩固 Proteus 软件和 Keil 软件的使用方法 2. 学习端口输入输出的高级应用 3. 掌握 7 段数码管的连接方式和动态显示法 4. 掌握查表程序和延时等子程序的设计
实验要求: 1. 在 Proteus 软件中画好 51 单片机最小核心电路,包括复位电路和晶振
电路 2. 在电路中增加八位 7 段数码管(共阳/共阴自选),将 P2 口作数据输出
口与 7 段数码管数据引脚相连 ,P3 引脚输出位选控制信号 3. 在 Keil 软件中编写程序,采用动态显示法,实现数码管分别显示数字
1-8 4. 实现指定数值的显示 (可使用 缓存数值) 5. 实现类似时钟的效果,如“ 13-23-25” 13 时 23 分 25 秒 6. 实现时钟的自动计时 7. 扩展要求: 结合 LED 显示,实现带数码显示的交通灯
按键控制数码管实训报告
一、实训目的本次实训旨在通过实际操作,掌握按键控制数码管的基本原理和实现方法,熟悉数字电路设计流程,提高动手能力和工程实践能力。
通过本次实训,学生应能够:1. 理解按键控制数码管的工作原理;2. 熟悉FPGA开发环境及工具的使用;3. 掌握数码管驱动电路的设计方法;4. 能够编写简单的FPGA程序,实现按键控制数码管的功能;5. 提高团队合作能力和问题解决能力。
二、实训原理数码管是一种常用的显示器件,由多个发光二极管组成,通常用于显示数字和字符。
按键作为输入设备,通过电路连接到微控制器(如FPGA、单片机等)的输入引脚,实现用户与数码管的交互。
按键控制数码管的基本原理如下:1. 按键输入处理:微控制器不断扫描按键的状态,当检测到按键被按下时,根据按键的编号或功能执行相应的操作。
2. 指令转换:将按键的输入转换为数码管能够理解的显示指令。
这通常涉及将按键编号或功能映射到特定的数字或字符编码。
3. 数码管显示控制:微控制器根据转换后的显示指令,通过控制数码管的驱动电路来点亮或熄灭数码管中的不同段,从而显示出所需的数字或字符。
4. 循环扫描与更新:为了保持数码管显示内容的实时性,微控制器需要不断重复上述步骤,形成一个循环扫描和更新的过程。
三、实训内容本次实训主要内容包括:1. 硬件电路设计:设计数码管驱动电路,包括LED数码管、按键、电阻、电容等元件的选择和连接。
2. FPGA程序设计:编写FPGA程序,实现按键控制数码管的功能,包括按键输入处理、指令转换、数码管显示控制等。
3. 系统调试与测试:将硬件电路与FPGA程序连接,进行系统调试和测试,验证系统功能是否正常。
四、实训步骤1. 硬件电路设计:- 选择合适的LED数码管、按键、电阻、电容等元件;- 根据元件规格和电路要求,绘制电路原理图;- 使用面包板搭建电路,并进行测试。
2. FPGA程序设计:- 选择合适的FPGA开发环境(如Vivado、Quartus II等);- 创建FPGA工程,添加必要的IP核(如时钟源、按键输入、数码管驱动等);- 编写FPGA程序,实现按键控制数码管的功能;- 编译FPGA程序,生成比特流文件。
单片机原理及应用A实验报告-数码管、键盘动态扫描

TF0 = 0x8f;
ge = cnt%10;
shi = cnt%100/10;
bai = cnt%1000/100;
qian = cnt%10000/1000;
/*数码管的扫描,显示四位数值*/
P1 = 0xff;
P2 = wei[0];
P1 = num[ge];
delay(1);
{
delay(1);
if(P35 == 0)
{
cnt = cnt*10 + 9;
if(WEI <= 1000)
WEI = WEI*10;
else
{
WEI = 1;
cnt = 0;
}
}
}
else if(P36 == 0)//加法
{
delay(1);
if(P36 == 0)
{
dat = cnt;
cnt = 0;
数码管、键盘动态扫描
一、实验目的
1、学习实验系统的基本操作,了解在实验系统中进行程序设计、仿真和调试的操作方法和步骤;
2、熟悉Proteus的基本仿真功能;
3、熟悉动态扫描的思想以及矩阵键盘的扫描方法。
二、实验原理
1、数码管的动态扫描利用的是人的视觉暂留效应也称“余辉效应”(人眼在观察景物时,光信号传入大脑神经,需经过一段短暂的时间,光的作用结束后,视觉形象并不立即消失,这种残留的视觉称“后像”,视觉的这一现象则被称为“视觉暂留”)。本来在同一时间里只能控制一个数码管显示,却让人产生几个数码管是同时显示的错觉。实现方法为在很短的时间内切换不同的数码管显示对应的数字。
图(3)实物连接图
图(4)实物工作图
五、体会
单片机实验报告——矩阵键盘数码管显示
单片机实验报告信息处理实验实验二矩阵键盘专业:电气工程及其自动化指导老师:***组员:明洪开张鸿伟张谦赵智奇学号:152703117 \152703115\152703118\152703114室温:18 ℃日期:2017 年10 月25日矩阵键盘一、实验内容1、编写程序,做到在键盘上每按一个键(0-F)用数码管将该建对应的名字显示出来。
按其它键没有结果。
二、实验目的1、学习独立式按键的查询识别方法。
2、非编码矩阵键盘的行反转法识别方法。
3、掌握键盘接口的基本特点,了解独立键盘和矩阵键盘的应用方法。
4、掌握键盘接口的硬件设计方法,软件程序设计和贴士排错能力。
5、掌握利用Keil51软件对程序进行编译。
6、会根据实际功能,正确选择单片机功能接线,编制正确程序。
对实验结果能做出分析和解释,能写出符合规格的实验报告。
三、实验原理1、MCS51系列单片机的P0~P3口作为输入端口使用时必须先向端口写入“1”。
2、用查询方式检测按键时,要加入延时(通常采用软件延时10~20mS)以消除抖动。
3、识别键的闭合,通常采用行扫描法和行反转法。
行扫描法是使键盘上某一行线为低电平,而其余行接高电平,然后读取列值,如读列值中某位为低电平,表明有键按下,否则扫描下一行,直到扫完所有行。
行反转法识别闭合键时,要将行线接一并行口,先让它工作在输出方式,将列线也接到一个并行口,先让它工作于输入方式,程序使CPU通过输出端口在各行线上全部送低电平,然后读入列线值,如此时有某键被按下,则必定会使某一列线值为0。
然后,程序对两个并行端口进行方式设置,使行线工作于输入方式,列线工作于输出方式,并将刚才读得的列线值从列线所接的并行端口输出,再读取行线上输入值,那么,在闭合键所在行线上的值必定为0。
这样,当一个键被接下时,必定可以读得一对唯一的行线值和列线值。
由于51单片机的并口能够动态地改变输入输出方式,因此,矩阵键盘采用行反转法识别最为简便。
单片机实验报告——LED数码管显示实验

单⽚机实验报告——LED数码管显⽰实验(此⽂档为word格式,下载后您可任意编辑修改!)《微机实验》报告LED数码管显⽰实验指导教师:专业班级:姓名:学号:联系⽅式:⼀、任务要求实验⽬的:理解LED七段数码管的显⽰控制原理,掌握数码管与MCU的接⼝技术,能够编写数码管显⽰驱动程序;熟悉接⼝程序调试⽅法。
实验内容:利⽤C8051F310单⽚机控制数码管显⽰器基本要求:利⽤末位数码管循环显⽰数字0-9,显⽰切换频率为1Hz。
提⾼要求:在4位数码管显⽰器上依次显⽰当天时期和时间,显⽰格式如下:yyyy (年份)mm.dd(⽉份.⽇).asm;Description: 利⽤末位数码管循环显⽰数字0-9,显⽰切换频率为1Hz。
;Designed by:gxy;Date:2012117;*********************************************************$include (C8051F310.inc)ORG 0000H ;复位⼊⼝AJMP MAINORG 000BH ;定时器0中断⼊⼝AJMP TIME0MAIN: ACALL Init_Device ;初始化配置MOV P0,#00H ;位选中第⼀个数码管MOV R0,#00H ;偏移指针初值CLR PSW.1 ;标志位清零SETB EA ;允许总中断SETB ET0 ;允许定时器0中断MOV TMOD,#01H ;定时器0选⼯作⽅式1MOV TH0,#06HMOV TL0,#0C6H ;赋初值,定时1sLOOP: MOV A,R0ADD A,#0BH ;加偏移量MOVC +PC ;查表取,段码MOV P1,A ;段码给P1显⽰SETB TR0 ;开定时LOOP1: JNB PSW.1,LOOP1 ;等待中断CLR PSW.1INC R0 ;偏移指针加⼀CJNE R0,#0AH,LOOP3MOV R0,#00H ;偏移指针满10清零AJMP LOOP ;返回DB 0FCH,60H,0DAH,0F2H,66H ;段码数据表:0、1、2、3、4 DB 0B6H,0BEH,0E0H,0FEH,0F6H; 5、6、7、8、9 ;***************************************************************** ; 定时器0中断;***************************************************************** TIME0: SETB PSW.1 ;标志位置⼀MOV TH0,#06H ;定时器重新赋值MOV TL0,#0C6HLOOP3: CLR TR0 ;关定时RETI;***************************************************************** ;初始化配置;***************************************************************** PCA_Init:anl PCA0MD, #0BFhmov PCA0MD, #000hretTimer_Init:mov TMOD, #001hmov CKCON, #002hretPort_IO_Init:; P0.0 - Unassigned, Open-Drain, Digital ; P0.1 - Unassigned, Open-Drain, Digital ; P0.2 - Unassigned, Open-Drain, Digital ; P0.3 - Unassigned, Open-Drain, Digital ; P0.4 -Unassigned, Open-Drain, Digital ; P0.5 - Unassigned, Open-Drain, Digital ; P0.6 - Unassigned, Open-Drain, Digital ; P0.7 - Unassigned, Open-Drain, Digital ; P1.0 - Unassigned, Open-Drain, Digital ; P1.1 - Unassigned, Open-Drain, Digital ; P1.2 - Unassigned, Open-Drain, Digital ; P1.3 - Unassigned, Open-Drain, Digital ; P1.4 - Unassigned, Open-Drain, Digital ; P1.5 - Unassigned, Open-Drain, Digital ; P1.6 - Unassigned, Open-Drain, Digital ; P1.7 - Unassigned, Open-Drain, Digital ; P2.0 - Unassigned, Open-Drain, Digital ; P2.1 -Unassigned, Open-Drain, Digital ; P2.2 - Unassigned, Open-Drain, Digital ; P2.3 - Unassigned, Open-Drain, Digital mov XBR1, #040hretInterrupts_Init:mov IE, #002hretInit_Device:lcall PCA_Initlcall Timer_Initlcall Port_IO_Initlcall Interrupts_Initretend提⾼部分:;*********************************************************;Filename: shumaguan2.asm;Description:在4位数码管显⽰器上依次显⽰当天时期和时间,显⽰格式如下:; 2012 (年份); 12.07(⽉份.⽇); 12.34(⼩时.分钟);Designed by:gxy;Date:2012117;*********************************************************$include (C8051F310.inc)ORG 0000HAJMP MAINORG 000BHAJMP TIME0MAIN: ACALL Init_DeviceMOV R0,#00H ;⽤于位选MOV R1,#00H ;⽤于段选MOV R2,#22H ;置偏移量,⽤于控制模式MOV R4,#8MOV R5,#250CLR PSW.1 ;标志位清零SETB EA ;允许总中断SETB ET0 ;允许定时器0中断MOV TMOD,#01H ;定时器0选⼯作⽅式1MOV TH0,#0FFHMOV TL0,#0C0H ;定时器赋初值1msBACK: MOV P0,R0 ;位选MOV A,R0ADD A,#40H ;选下⼀位MOV R0,AMOV A,R1ADD A,R2 ;加偏移量MOVC +PC ;查表取段码MOV P1,A ;段码给P1显⽰LOOP: SETB TR0 ;开定时HERE: JNB PSW.1,HERE ;等待中断CLR PSW.1DJNZ R5,BACKMOV R5,#250DJNZ R4,BACKMOV R4,#8 ;循环2000次(2s)MOV A,R2ADD A,#04H ;偏移量加04H,到下⼀模式段码初值地址 MOV R2,ACJNE R2,#2EH,LOOP2MOV R2,#22H ;加三次后偏移量回到初值LOOP2: AJMP BACK ;返回进⼊下⼀模式;段码数据表:DB 0DAH,60H,0FCH,0DAH ; 2102DB 0E0H,0FCH,61H,60H ; 701. 1DB 66H,0F2H,0DBH,60H ; 432. 1;*****************************************************************; 定时器0中断;***************************************************************** TIME0: MOV TH0,#0FFH MOV TL0,#0C0HCLR TR0SETB PSW.1INC R1 ;偏移指针加⼀CJNE R1,#04H,LOOPMOV R1,#00H ;偏移指针满04H清零RETI;***************************************************************** ; 初始化配置;***************************************************************** PCA_Init:anl PCA0MD, #0BFhmov PCA0MD, #000hretTimer_Init:mov TMOD, #001hmov CKCON, #002hretPort_IO_Init:; P0.0 - Unassigned, Open-Drain, Digital; P0.1 - Unassigned, Open-Drain, Digital; P0.2 - Unassigned, Open-Drain, Digital; P0.3 - Unassigned, Open-Drain, Digital; P0.4 - Unassigned, Open-Drain, Digital; P0.5 - Unassigned, Open-Drain, Digital; P0.6 - Unassigned, Open-Drain, Digital; P0.7 - Unassigned, Open-Drain, Digital; P1.0 - Unassigned, Open-Drain, Digital; P1.1 - Unassigned, Open-Drain, Digital; P1.2 - Unassigned, Open-Drain, Digital; P1.3 - Unassigned, Open-Drain, Digital; P1.4 - Unassigned, Open-Drain, Digital; P1.5 - Unassigned, Open-Drain, Digital; P1.6 - Unassigned, Open-Drain, Digital; P1.7 - Unassigned, Open-Drain, Digital; P2.0 - Unassigned, Open-Drain, Digital; P2.1 - Unassigned, Open-Drain, Digital; P2.2 - Unassigned, Open-Drain, Digital; P2.3 - Unassigned, Open-Drain, Digitalmov XBR1, #040hretInterrupts_Init:mov IE, #002hretInit_Device:lcall PCA_Initlcall Timer_Initlcall Port_IO_Initlcall Interrupts_Initretend六、程序测试⽅法与结果、软件性能分析软件调试总体截图:基础部分:软件运⾏时,我们发现P0端⼝为00H,P1端⼝以依次为FCH、60H、DAH、F2H、66H、B6H、BEH、E0H、FEH、F6H。
单片机数码管显示实验

实验一数码管实验一、实验目的1. 了解数码管的显示原理;2. 掌握JXARM9-2440 中数码管显示编程方法二、实验仪器JXARM9-2440教学实验箱、ADT1000仿真器和ADT IDE集成开发环境、串口连接线、PC机。
三、实验原理7段LED由7个发光二极管按“日”字形排列,所有发光二极管的阳极连在一起称共阳极接法,阴极连在一起称为共阴极接法。
LED显示器的接口一般有静态显示与动态显示接口两种方式。
本实验中采用的是动态显示接口,其中数码管扫描控制地址为0x20007000,位0-位5每位分别对应一个数码管,将其中某位清0 来选择相应的数码管,地址0x20006000 为数码管的数据寄存器。
数码管采用共阳方式,向该地址写一个数据就可以控制LED 的显示,数据中的1对应的不亮,0对应的亮,数码管各位从高到低排列为dp-g-f-e-d-c-b-a,例如当数据寄存器是11111111时则不亮,当是01111111时则显示8,其原理图如图所示。
四、实验内容1、编程实现:六个数码管同时正向显示0-F ,然后反向显示F-0。
2、编程实现:在六个数码管上依次显示与自己姓名有关的内容,可分辨出轮流显示。
3、编程实现:在六个数码管上依次显示与自己姓名有关的内容,分辨不出轮流显示。
4*、编程实现:在每个数码管上递增显示0—9 。
5*、自行开发。
五、实验程序1,/****************************************************************************//*文件名称: LEDSEG7.C *//*实验现象:数码管依次显示出0、1,2、……9、a、b、C、d、E、F *//****************************************************************************/ #define U8 unsigned charunsigned char seg7table[16] = {/* 0 1 2 3 4 5 6 7*/0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8,/* 8 9 A B C D E F*/0x80, 0x90, 0x88, 0x83, 0xc6, 0xa1, 0x86, 0x8e,};void Delay(int time);/****************************************************************************//* 函数说明: JXARM9-2410 7段构共阳数码管测试 *//* 功能描述: 依次在7段数码管上显示0123456789ABCDEF *//* 返回代码: 无 *//* 参数说明: 无 *//****************************************************************************/ void Test_Seg7(void) {int i;*((U8*)0x20007000)=0x00; /*6个数码管都亮*/for(;;){/*数码管从0到F依次将字符显示出来*/for(i=0;i<0x10;i++){*((U8*)0x20006000)=seg7table[i];Delay(10000);}/*数码管从F到0依次将字符显示出来*/ for(i=0x0f;i>0x00;i--){*((U8*)0x20006000)=seg7table[i];Delay(10000);}}// TODO}/****************************************************************************//* Function name : 循环延时子程序 */ /* Description : 循环 'time' 次 */ /* Return type :void */ /* Argument : 循环延时计数器 */ /****************************************************************************/ void Delay(int time) {int i;int delayLoopCount=10000;for(;time>0;time--);for(i=0;i<delayLoopCount;i++);}2,/****************************************************************************/ /*文件名称: LEDSEG7.C */ /*实验现象:数码管依次显示ZHAngg,并能看出轮流显示 *//****************************************************************************/ #define U8 unsigned charunsigned char seg7table[16] = {/* Z H A n g g 6 7*/0xa4, 0x89, 0x88, 0xc8, 0x90, 0x90, 0x82, 0xf8,/* 8 9 A B C D E F*/0x80, 0x90, 0x88, 0x83, 0xc6, 0xa1, 0x86, 0x8e,/* H I N*/0x89, 0xcf, 0x48};void Delay(int time);/****************************************************************************/ /* 函数说明: JXARM9-2410 7段构共阳数码管测试 */ /* 功能描述: 在六个数码管上分别显示字母,与姓名有关 */ /* 返回代码: 无 */ /* 参数说明: 无 */ /****************************************************************************/ void Test_Seg7(void) {int i;*((U8*)0x20007000)=0x00;for(;;){*((U8*)0x20007000)=0x1f;*((U8*)0x20006000)=seg7table[0];Delay(10000);*((U8*)0x20007000)=0x2f;*((U8*)0x20006000)=seg7table[1];Delay(10000);*((U8*)0x20007000)=0x37;*((U8*)0x20006000)=seg7table[2];Delay(10000);*((U8*)0x20007000)=0x3b;*((U8*)0x20006000)=seg7table[3];Delay(10000);*((U8*)0x20007000)=0x3d;*((U8*)0x20006000)=seg7table[4];Delay(10000);*((U8*)0x20007000)=0x3e;*((U8*)0x20006000)=seg7table[5];Delay(10000);}// TODO}/***************************************************************************/ /* Function name : 循环延时子程序 */ /* Description : 循环 'time' 次 */ /* Return type :void */ /* Argument : 循环延时计数器 */ /****************************************************************************/ void Delay(int time) {int i;int delayLoopCount=10000;for(;time>0;time--);for(i=0;i<delayLoopCount;i++);}3,/****************************************************************************/ /*文件名称: LEDSEG7.C */ /*实验现象:数码管依次显示出ZHAngg,并看不出轮流显示 *//****************************************************************************/ #define U8 unsigned charunsigned char seg7table[16] = {/* Z H A n g g 6 7*/0xa4, 0x89, 0x88, 0xc8, 0x90, 0x90, 0x82, 0xf8,/* 8 9 A B C D E F*/0x80, 0x90, 0x88, 0x83, 0xc6, 0xa1, 0x86, 0x8e,/* H I N*/0x89, 0xcf, 0x48};void Delay(int time);/****************************************************************************/ /* 函数说明: JXARM9-2410 7段构共阳数码管测试 */ /* 功能描述: 在六个数码管上分别显示字母,与姓名有关*//* 返回代码: 无 */ /* 参数说明: 无 */ /****************************************************************************/ void Test_Seg7(void) {int i;*((U8*)0x20007000)=0x00;for(;;){*((U8*)0x20007000)=0x1f;*((U8*)0x20006000)=seg7table[0];Delay(10000);*((U8*)0x20007000)=0x2f;*((U8*)0x20006000)=seg7table[1];Delay(10000);*((U8*)0x20007000)=0x37;*((U8*)0x20006000)=seg7table[2];Delay(10000);*((U8*)0x20007000)=0x3b;*((U8*)0x20006000)=seg7table[3];Delay(10000);*((U8*)0x20007000)=0x3d;*((U8*)0x20006000)=seg7table[4];Delay(10000);*((U8*)0x20007000)=0x3e;*((U8*)0x20006000)=seg7table[5];Delay(1);}// TODO}/***************************************************************************//* Function name : 循环延时子程序 */ /* Description : 循环 'time' 次 */ /* Return type :void */ /* Argument : 循环延时计数器 */ /****************************************************************************/ void Delay(int time) {int i;int delayLoopCount=10000;for(;time>0;time--);for(i=0;i<delayLoopCount;i++);}4,/****************************************************************************/ /*文件名称: LEDSEG7.C */ /*实验现象:数码管依次显示出0、1,2、……9、a、b、C、d、E、F */ /****************************************************************************/ #define U8 unsigned charunsigned char seg7table[16] = {/* 0 1 2 3 4 5 6 7*/0xc0, 0xf9, 0xa4, 0xb0, 0x99, 0x92, 0x82, 0xf8,/* 8 9 A B C D E F*/0x80, 0x90, 0x88, 0x83, 0xc6, 0xa1, 0x86, 0x8e,};void Delay(int time);/****************************************************************************/ /* 函数说明: JXARM9-2410 7段构共阳数码管测试 */ /* 功能描述: 依次在7段数码管各自递增显示0—9 *//* 返回代码: 无 */ /* 参数说明: 无 */ /****************************************************************************/ void Test_Seg7(void) {int i;for(;;){for(i=0;i<=0x09;i++){*((U8*)0x20007000)=0x1f;*((U8*)0x20006000)=seg7table[i];Delay(10000);}for(i=0;i<=0x09;i++){*((U8*)0x20007000)=0x2f;*((U8*)0x20006000)=seg7table[i];Delay(10000);}for(i=0;i<=0x09;i++){*((U8*)0x20007000)=0x37;*((U8*)0x20006000)=seg7table[i];Delay(10000);}for(i=0;i<=0x09;i++){*((U8*)0x20007000)=0x3b;*((U8*)0x20006000)=seg7table[i];Delay(10000);}for(i=0;i<=0x09;i++){*((U8*)0x20007000)=0x3d;*((U8*)0x20006000)=seg7table[i];Delay(10000);}}// TODO}/****************************************************************************/ /* Function name : 循环延时子程序 */ /* Description : 循环 'time' 次 */ /* Return type :void */ /* Argument : 循环延时计数器 */ /****************************************************************************/ void Delay(int time) {int i;int delayLoopCount=10000;for(;time>0;time--);for(i=0;i<delayLoopCount;i++);}六、实验结果与分析实验一结果:六个数码管同时显示相同的符号,从0-F再由F-0之间的循环变换。
单片机数码管显示实验报告

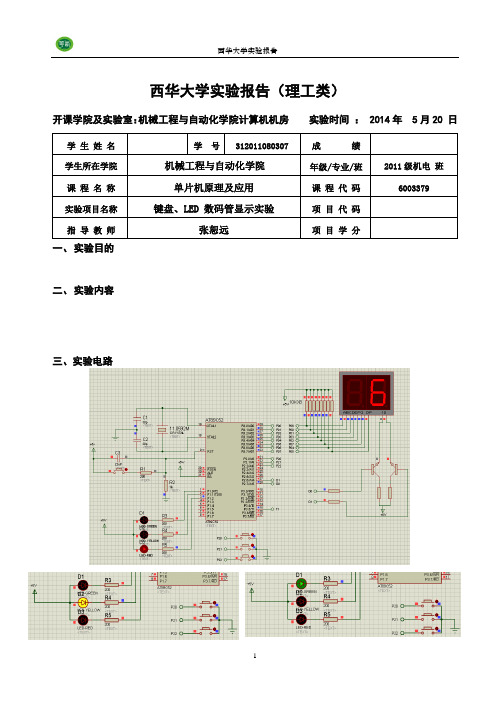
单片机数码管显示实验报告篇一:单片机应用实验报告 2键盘、LED 数码管显示实验西华大学实验报告(理工类)开课学院及实验室:机械工程与自动化学院计算机机房实验时间 : 2014年 5月20 日一、实验目的二、实验内容三、实验电路四、实验程序#includereg52.hsbit key0=P2 ;sbit key1=P2 ;sbit key2=P2 ;sbit red=P1 ;sbit yell=P1 ;sbit gre=P1 ;sbit LED1=P2 ;sbit LED2=P2 ;int num=0;unsigned char code dispcode[]={0x30,0xfc,0xa2,0xa4,0x6c,0x25,0x21,0xbc,0x20,0x24};void init(){key0=1;key1=1;key2=1;}void delayms(int a) { int b=0;for(a;a0;a--)for(b=110;b0;b--); }int judge(){if(key0==0){delayms(100);if(key0==0){red=0;yell=1;gre=1;num++;if(num==10)num=0;}}if(key1==0) {delayms(5);if(key1==0) {red=1;yell=0;gre=1;}}if(key2==0) {delayms(5);if(key2==0) {red=1;yell=1;gre=0;}}return 0;}void xianshi(){delayms(5);P0=dispcode[num];LED1=0;LED2=1;delayms(5);}int main(){init();while(1){judge();xianshi();}return 0;}五、实验步骤六、附录篇二:单片机实验两位数码管显示报告一、实验目的1、在之前单键实验和中断控制数码管“静态”显示实验的基础上,把单键判断、数码管显示和中断结合起来编写中断程序实现单键控制一位数码管;2、在实现控制一位数码管显示的基础上用单键控(转载于: 池锝网:单片机数码管显示实验报告)制两位数码管显示。
单片机原理及应用实验报告

单片机原理及应用实验报告一、引言单片机(Microcontroller Unit,简称MCU)是一种集成电路芯片,内部集成了微处理器、存储器、输入输出接口和定时器等功能模块,广泛应用于各种电子设备和控制系统中。
本实验报告将介绍单片机的基本原理以及其在实际应用中的实验。
二、单片机的基本原理单片机的核心是微处理器,它负责执行程序指令。
单片机的存储器包括程序存储器(Program Memory)和数据存储器(Data Memory)。
程序存储器用于存储程序指令,数据存储器用于存储数据和中间结果。
单片机通过输入输出接口与外部设备进行通信,通过定时器来控制程序的执行时间。
三、单片机的应用实验1. LED闪烁实验LED闪烁实验是单片机入门实验的经典案例。
通过控制单片机的输出口,周期性地改变LED的状态,从而实现LED的闪烁效果。
这个实验可以帮助初学者了解单片机编程的基本概念和操作。
2. 温度测量实验温度测量实验可以通过连接温度传感器和单片机的输入口,实时地获取环境温度,并通过数码管或LCD显示器来显示温度数值。
这个实验可以帮助学生掌握单片机输入输出口的使用方法,以及模拟信号的处理和显示。
3. 蜂鸣器控制实验蜂鸣器控制实验可以通过连接蜂鸣器和单片机的输出口,实现对蜂鸣器的控制。
通过编写程序,可以使蜂鸣器发出不同的声音,如单调的蜂鸣声、警报声等。
这个实验可以帮助学生学习单片机的数字输出和PWM(脉冲宽度调制)技术。
4. 电机控制实验电机控制实验可以通过连接电机和单片机的输出口,实现对电机的控制。
通过编写程序,可以控制电机的转动方向和速度。
这个实验可以帮助学生理解单片机输出口的电流和电压特性,以及电机的控制原理。
5. 红外遥控实验红外遥控实验可以通过连接红外接收器和单片机的输入口,实现对红外遥控信号的解码和处理。
通过编写程序,可以实现对各种红外遥控器的解码和按键处理。
这个实验可以帮助学生学习单片机输入口的中断处理和红外通信原理。
单片机应用实验报告 2键盘、LED 数码管显示实验
}
int main(){init();来自while(1){
judge();
xianshi();
}
return 0;
}
五、实验步骤
六、附录
sbit LED2=P2^6;
int num=0;
unsigned char code dispcode[]=
{0x30,0xfc,0xa2,0xa4,0x6c,
0x25,0x21,0xbc,0x20,0x24};
void init()
{
key0=1;
key1=1;
key2=1;
}
void delayms(int a)
{int b=0;
for(a;a>0;a--)
for(b=110;b>0;b--);
}
int judge()
{
if(key0==0)
{
delayms(100);
if(key0==0)
{
red=0;
yell=1;
gre=1;
num++;
if(num==10)
num=0;
}
}
if(key1==0)
{
delayms(5);
if(key1==0)
{
red=1;
yell=0;
gre=1;
}
}
if(key2==0)
{
delayms(5);
if(key2==0)
{
red=1;
yell=1;
gre=0;
}
}
return 0;
}
void xianshi()
{
单片机按键与显示实验报告
单片机原理及应用随堂实验报告学院计算机与电子信息学院专业电子信息工程班级电信11 -1班姓名温石坚学号 11034030132 指导教师左敬龙实验报告评分:_______一、实验原理及电路实验原理:在电路图中,单片机AT89C51的P1口接有一按键矩阵,P0和P2口接15个灯,P3口接一个led数码显示管。
刚开始时,电路处于扫描按键是否被按下的状态。
当有某个按键被按下时,在键盘扫描函数的作用下,会有一小段消抖动的时间。
当确定没抖动情况下,程序就会查找出是哪个按键被按下了。
之后就会执行按键功能函数。
以下是按键扫描函数(包括消抖动程序)和按键功能函数:按键扫描函数按键功能函数uchar rdkey() uchar i;{ void k(uchar n)uchar scan1,scan2,keycode,j; {P3=tab[n];P1=0x0f; if(n>=8)scan1=P1; {if((scan1&0x0f)!=0x0f) for(i=0;i<=8;i++){ {P2=led[i]; P0=0x00;delayms(30); delayms(100);scan1=P1; }}if((scan1&0x0f)!=0x0f) else{{ for(i=0;i<=n;i++)P1=0xf0; {scan2=P1; P0=led[i];P2=0xff;delayms(100); keycode=scan1|scan2; }for(j=0;j<=15;j++) }{ }if(keycode= = key_code[j]){key=j;return(key);}}}}else P1=0xff;return (16);}按键扫描函数是通过首先检查行(给P1赋值为0x0f,再将P1赋给变量scan1,用0x0f与scan1相与,可检查出第几行的按键被按下),再检查列的方法(将P1赋值为0xf0,再将P1赋给scan2,此时被按下键的那一列的值会变为0),然后再将两次检查的数按位或,最后将按位或后的那个数与组合键编码对比组合键编码,找出被按下的按键数,返回按键值。
单片机实验报告二-数码管显示实验
单片机实验报告二-数码管显示实验摘要:本实验使用单片机控制数码管的显示,在实验过程中通过学习单片机的GPIO口的编程,调试程序、调节电路来达到正确的显示效果。
最终按照要求实现了单片机控制数码管的计数器。
关键词:单片机、数码管、GPIO口、计数器一、实验介绍数码管是一种介于机械仪表和液晶显示器之间的电子显示器件,广泛应用于计时器、计数器、仪表等电子产品中。
本实验旨在通过单片机控制数码管的显示来加深对GPIO口的使用和调试程序的理解,同时了解数码管的原理。
本实验主要分为两部分:数码管显示基础实验和数码管控制开关实验。
通过这两部分的实验可以了解数码管的工作原理和单片机的基本控制方式。
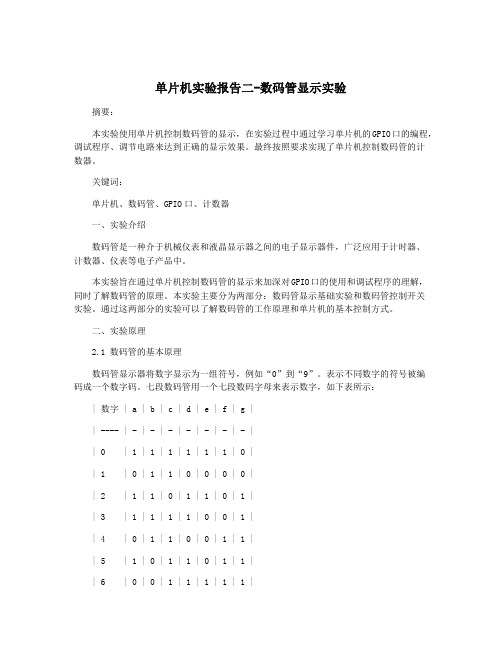
二、实验原理2.1 数码管的基本原理数码管显示器将数字显示为一组符号,例如“0”到“9”。
表示不同数字的符号被编码成一个数字码。
七段数码管用一个七段数码字母来表示数字,如下表所示:| 数字 | a | b | c | d | e | f | g || ---- | - | - | - | - | - | - | - || 0 | 1 | 1 | 1 | 1 | 1 | 1 | 0 || 1 | 0 | 1 | 1 | 0 | 0 | 0 | 0 || 2 | 1 | 1 | 0 | 1 | 1 | 0 | 1 || 3 | 1 | 1 | 1 | 1 | 0 | 0 | 1 || 4 | 0 | 1 | 1 | 0 | 0 | 1 | 1 || 5 | 1 | 0 | 1 | 1 | 0 | 1 | 1 || 6 | 0 | 0 | 1 | 1 | 1 | 1 | 1 || 7 | 1 | 1 | 1 | 0 | 0 | 0 | 0 || 8 | 1 | 1 | 1 | 1 | 1 | 1 | 1 || 9 | 1 | 1 | 1 | 1 | 0 | 1 | 1 |通过控制数码管的七个LED灯的亮灭,可以实现不同符号显示。
数码管显示数字实训报告

一、实验目的本次实训的主要目的是让学生通过实际操作,掌握数码管的基本原理、连接方式、驱动方法以及编程技巧,能够利用数码管实现数字的显示。
通过本次实训,学生将能够:1. 理解数码管的工作原理和分类。
2. 掌握数码管的驱动电路和连接方法。
3. 学会使用编程语言控制数码管显示数字。
4. 培养动手能力和解决问题的能力。
二、实验原理数码管是一种常用的显示器件,用于显示数字、字母或其他符号。
根据发光段数的不同,数码管可以分为七段数码管和十六段数码管。
七段数码管由七个发光段组成,可以显示0-9的数字和部分字母;十六段数码管由十六个发光段组成,可以显示更多的字符。
数码管的显示原理是:通过控制各个发光段的亮与灭,来组成不同的字符。
在七段数码管中,通常将七个发光段分别命名为a、b、c、d、e、f、g,其中g段为小数点。
当某个发光段接收到高电平时,该段发光;当接收到低电平时,该段不发光。
数码管的驱动方法主要有以下几种:1. 静态驱动:每个数码管都连接到独立的驱动器上,优点是显示稳定,但需要较多的引脚和布线通道。
2. 动态驱动:多个数码管共用一组驱动器,通过轮流点亮各个数码管,实现多位数码管的显示。
优点是引脚和布线通道较少,但显示效果不如静态驱动。
三、实验器材1. 数码管(七段或十六段)2. 驱动芯片(如74HC595)3. 电阻、电容等电子元件4. 开发板(如Arduino、51单片机等)5. 编程软件(如Arduino IDE、Keil等)四、实验步骤1. 数码管识别:观察数码管的引脚排列,确定各个发光段的连接方式。
2. 驱动电路搭建:根据数码管的类型和驱动方法,搭建相应的驱动电路。
例如,使用74HC595芯片作为驱动器,连接数码管和驱动芯片。
3. 编程控制:使用编程软件编写程序,控制数码管显示数字。
程序主要包括以下内容:- 初始化驱动器;- 设置数码管的显示模式(静态或动态);- 根据需要显示的数字,计算并输出对应的段码;- 控制数码管显示。
单片机指令的数码管显示学习如何使用单片机指令进行数码管显示
单片机指令的数码管显示学习如何使用单片机指令进行数码管显示在学习如何使用单片机指令进行数码管显示之前,我们首先需要了解什么是单片机和数码管。
一、单片机简介单片机是一种集成电路芯片,具有微处理器、存储器和各种接口电路等功能。
它具有体积小、功耗低、成本低等特点,广泛应用于电子设备、通信设备、汽车电子等领域。
二、数码管简介数码管是一种电子数字显示器件,常用来显示数字信息。
常见的数码管有共阴极数码管和共阳极数码管,其中共阴极数码管的极性是负极大,共阳极数码管的极性是正极大。
接下来,我们将学习如何使用单片机指令控制数码管进行显示。
1. 准备工作首先,我们需要准备以下材料:- 单片机开发板- 数码管(可以根据需要选择共阴极还是共阳极数码管)- 面包板- 连接线2. 硬件连接将数码管的引脚与单片机开发板上的引脚相连接,确保连接稳固。
3. 编写代码使用单片机开发工具(如Keil、Arduino等)编写相应的代码。
下面以Keil例举一个简单的示例。
```#include <reg51.h>sbit digit1 = P2^0;sbit digit2 = P2^1;sbit digit3 = P2^2;sbit digit4 = P2^3;sbit segA = P0^0; // 数码管A段sbit segB = P0^1; // 数码管B段sbit segC = P0^2; // 数码管C段sbit segD = P0^3; // 数码管D段sbit segE = P0^4; // 数码管E段sbit segF = P0^5; // 数码管F段sbit segG = P0^6; // 数码管G段sbit segDP = P0^7; // 数码管小数点段void delay(unsigned int n){unsigned int i, j;for(i = 0; i < n; i++)for(j = 0; j < 120; j++);}void displayDigit(unsigned char digit){switch(digit){case 0:segA = 0; segB = 0; segC = 0; segD = 0; segE = 0; segF = 0; segG = 1; segDP = 1;break;case 1:segA = 1; segB = 0; segC = 0; segD = 1; segE = 1; segF = 1; segG = 1; segDP = 1;break;case 2:segG = 0; segDP = 1;break;case 3:segA = 0; segB = 0; segC = 0; segD = 0; segE = 1; segF = 1; segG = 0; segDP = 1;break;case 4:segA = 1; segB = 0; segC = 0; segD = 1; segE = 1; segF = 0; segG = 0; segDP = 1;break;case 5:segA = 0; segB = 1; segC = 0; segD = 0; segE = 1; segF = 0; segG = 0; segDP = 1;break;case 6:segA = 0; segB = 1; segC = 0; segD = 0; segE = 0; segF = 0; segG = 0; segDP = 1;break;case 7:segG = 1; segDP = 1;break;case 8:segA = 0; segB = 0; segC = 0; segD = 0; segE = 0; segF = 0; segG = 0; segDP = 1;break;case 9:segA = 0; segB = 0; segC = 0; segD = 1; segE = 1; segF = 0; segG = 0; segDP = 1;break;default:break;}}void main(){unsigned char i;while(1){for(i = 0; i < 10; i++){displayDigit(i);delay(1000);}}}```4. 烧写程序将编写好的代码烧写到单片机开发板上。
单片机原理(按键识别 )实验报告
教育资料
.
while (1) {
if(key==0) {
delay(1000); if(key==0) {
led=~led; while(key==0); }
} } } (2)按键识别 ( 按下灭,再按闪) #include<reg51.h> #define uint unsigned int #define uchar unsigned char sbit led=P2^6; sbit key=P2^7;
.
switch(j) { case 0 : led=0;break; case 1 : led=~led;delay(100);break; default:break; }
}
}
(3)按键识别 ( 按下数码管数值加 1) #include<reg51.h> #define uint unsigned int #define uchar unsigned char uchar code LedCode[]={ 0x3f,0x06,0x5b,0x4f,0x66, 0x6d,0x7d,0x07,0x7f,0x6f,0x00}; uchar DispBuf[8]; sbit led=P2^6;
教育资料
.
if(hour>=24) {
hour=0; }
}
void main() {
uint i=2; while (1) {
if(key==0) {
delay(1000); if(key==0) {
i++; while(key==0); i=i%3;
教育资料
.
} } switch(i)
《单片机原理及应用》实验报告
《单片机原理及应用》实验报告2017/2018学年第 1 学期系别计算机学院专业软件工程班级17软件工程班姓名XXXXXX学号8888888888授课老师******实验一:流水灯实验1.实验目的(1)学习编译和仿真环境使用(2)学习P3口的使用方法(3)学习延时子程序的编写2实验内容(1)通过对P3口地址的操作控制8位LED流水点亮,从而认识单片机的接口;(2)通过改变并行口输出电平控制LED灯的点亮与否,通过延时程序控制亮灯时间。
3.实验运行结果图4.源代码//流水灯实验#include<reg51.h>//包含单片机寄存器的头文件sfr x=0xb0; //P3口在存储器中的地址是b0H, 通过sfr可定义8051内核单片机//的所有内部8位特殊功能寄存器,对地址x的操作也就是对P1口的操作/****************************************函数功能:延时一段时间*****************************************/void delay(void){unsigned char i,j;ﻩ for(i=0;i<255i++)ﻩfor(j=0;j<255j++) ﻩﻩﻩ ; //利用循环等待若干机器周期,从而延时一段时间}/***************************************** 函数功能:主函数******************************************/ void main(void){while(1){x=0xfe; //第一个灯亮ﻩﻩdelay(); //调用延时函数x=0xfd; //第二个灯亮ﻩﻩdelay(); //调用延时函数x=0xfb; //第三个灯亮delay(); //调用延时函数ﻩx=0xf7; //第四个灯亮ﻩdelay();//调用延时函数ﻩx=0xef; //第五个灯亮delay(); //调用延时函数ﻩﻩx=0xdf; //第六个灯亮ﻩdelay(); //调用延时函数ﻩx=0xbf; //第七个灯亮ﻩﻩdelay(); //调用延时函数x=0x7f;//第八个灯亮delay(); //调用延时函数}}实验二:中断实验1.实验目的(1)熟悉51单片机中断初始化编程方法。
单片机实训报告键盘和数码管显示(WORD档)

单片机实训报告(一)班级:测控 9 0 1学号:姓名实验名称:键盘和数码管显示实验目的:熟悉掌握ZLG7289的功能和特性,ZLG7289芯片各引脚名称及功能和ZLG7289与微控制器的接口,ZLG7289的SPI接口和控制指令。
同时进一步熟悉掌握keil软件的操作和编程。
实验原理:ZLG7289是一款数码显示驱动和键盘扫描管理的芯片。
主要有如下的特性:1.直接驱动8位共阴式数码管或64只独立的LED;2.管理多达64只按键,自动消除抖动;3.段电流可达15mA以上,位电流可达100mA;4.具有左移、右移、闪烁、消隐、段点亮等多种功能;5.与微控制器之间采用三线SPI总线接口,占用I/O资源少。
电路主要由芯片ZLG7289、8位共阴极数码管、64键的键盘矩阵以及单片机构成。
ZLG7289的控制电路图:电路的工作原理:当ZLG7289接收到单片机发出的指令(包括纯指令)后,经过读取、分析和处理,将会在数码管上显示相对应的操作指令。
当ZLG7289检测到有效的按键时,KEY脚将从高电平变为低电平,并一直保持到按键结束。
在此期间,如果ZLG7289接收到“读键盘数据指令”,则输出当前按键的键盘代码。
ZLG7289芯片各引脚名称及功能:引脚名称说明1、2 RTCC、Vcc 接电源3、5 NC 悬空4 Vss 接地6 /CS 片选输入端,低电平时,可向其发指令或读键盘。
ZLG7289使用SPI串行总线与微控制器接口。
SPI接口SPI串行总线是Motorola公司推出的一种同步串行接口。
通常它需要四条线,就可与微控制器之间实现全双工的同步串行通讯。
SPI串行总线主要有如下的特性:1.采用主从模式(Master Slave)架构,支持多Slave模式,一般只支持单Master,Master 控制时钟。
2.采用四线,实现全双工通信。
图1 SPI接口连线示意图SPI的数据传输时序模式SPI接口定义了四种数据传输的时序模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5、实验程序
结束
(实验程序清单作为附件放在最后)
6、实验步骤
1)keil中C语言程序实现。
2)在proteus中完成电路图设计,并实现仿真。
3)硬件实验部分:
用一条8PIN 数据排线,把矩阵按键部份的JP50,接到CPU 部份的P1 口JP44;
接8 位数码管的数据线。
将数码管部份的数据口 JP5 接到CPU 部份的P0 口JP51;
接8 位数码管的显示位线。
将数码管部份的显示位口 JP8 接到CPU 部份的P2 口JP52.
7、实验数据及结果
8、思考题
采用P3口控制矩阵按键输入,程序应该如何修改?
答:本实验的程序中可以不用蜂鸣器驱动线,把以下程序的sbit BEEP = P3 ^ 7;及函数void beep()等删掉后;需要把扫描键值的函数改一下:unsigned char keyscan()
{
unsigned char scan1, scan2, keycode,j;
P13= 0xf0;
scan1 = P3;
if (scan1 != 0xf0) //判键是否按下
{
delayms(10);
scan1 = P3;
if (scan1 != 0xf0) //二次判键是否按下
{
P1 = 0x0f;
scan2 = P3;。