视觉SLAM十四讲 第六讲 非线性优化
《视觉SLAM十四讲》笔记(ch7)

《视觉SLAM⼗四讲》笔记(ch7)ch7 视觉⾥程计1本章⽬标:1.理解图像特征点的意义,并掌握在单副图像中提取出特征点及多副图像中匹配特征点的⽅法2.理解对极⼏何的原理,利⽤对极⼏何的约束,恢复出图像之间的摄像机的三维运动3.理解PNP问题,以及利⽤已知三维结构与图像的对应关系求解摄像机的三维运动4.理解ICP问题,以及利⽤点云的匹配关系求解摄像机的三维运动5.理解如何通过三⾓化获得⼆维图像上对应点的三维结构本章⽬的:基于特征点法的vo,将介绍什么是特征点,如何提取和匹配特征点,以及如何根据配对的特征点估计相机运动和场景结构,从⽽实现⼀个基本的两帧间视觉⾥程计。
特征点:⾓点、SIFT(尺度不变特征变换,Scale-Invariant Feature Transform)、SURF、、ORB(后三个是⼈⼯设计的特征点,具有更多的优点)特征点的组成:1.关键点:指特征点在图像⾥的位置2.描述⼦:通常是⼀个向量,按照某种⼈为设计的⽅式,描述了该关键点周围像素的信息。
相似的特征应该有相似的描述⼦(即当两个特征点的描述⼦在向量空间上的距离相近,认为这两个特征点是⼀样的)以ORB特征为代表介绍提取特征的整个过程:ORB特征:OrientedFAST关键点+BRIEF关键⼦提取ORB特征的步骤:1.提取FAST⾓点:找出图像中的“⾓点”,计算特征点的主⽅向,为后续BRIEF描述⼦增加了旋转不变特性FAST⾓点:主要检测局部像素灰度变化明显的地⽅特点:速度快缺点:1).FAST特征点数量很⼤且不确定,但是我们希望对图像提取固定数量的特征2).FAST⾓点不具有⽅向信息,并且存在尺度问题解决⽅式:1).指定要提取的⾓点数量N,对原始FAST⾓点分别计算Harris响应值,然后选取前N个具有最⼤响应值的⾓点作为最终的⾓点集合2).添加尺度和旋转的描述 尺度不变性的实现:构建图像⾦字塔,并在⾦字塔的每⼀层上检测⾓点(⾦字塔:指对图像进⾏不同层次的降采样,以获得不同分辨率的图像)特征旋转的实现:灰度质⼼法(质⼼:指以图像块灰度值作为权重的中⼼)2.计算BRIEF描述⼦:对前⼀步提取出的特征点周围图像区域进⾏扫描特点:使⽤随机选点的⽐较,速度⾮常快,由于使⽤了⼆进制表达,存储起来也⼗分⽅便,适⽤于实时的图像匹配在不同图像之间进⾏特征匹配的⽅法:1.暴⼒匹配:浮点类型的描述⼦,使⽤欧式距离度量⼆进制类型的描述⼦(⽐如本例中的BRIEF描述⼦),使⽤汉明距离度量缺点:当特征点数量很⼤时,暴⼒匹配法的运算量会变得很⼤2.快速近似最近邻(FLANN):适合匹配特征点数量极多的情况实践部分:1.OpenCV的图像特征提取、计算和匹配的过程:演⽰如何提取ORB特征并进⾏匹配代码: 1 #include <iostream>2 #include <opencv2/core/core.hpp>3 #include <opencv2/features2d/features2d.hpp>4 #include <opencv2/highgui/highgui.hpp>56using namespace std;7using namespace cv;89int main(int argc,char** argv)10 {11if(argc!=3)12 {13 cout<<"usage:feature_extraction img1 img2"<<endl;14return1;15 }1617//读取图像18 Mat img_1=imread(argv[1],CV_LOAD_IMAGE_COLOR);19 Mat img_2=imread(argv[2],CV_LOAD_IMAGE_COLOR);2021//初始化22 vector<KeyPoint> keypoints_1,keypoints_2;//关键点,指特征点在图像⾥的位置23 Mat descriptors_1,descriptors_2;//描述⼦,通常是向量24 Ptr<ORB> orb=ORB::create(500,1.2f,8,31,0,2,ORB::HARRIS_SCORE,31,20);2526//第⼀步:检测OrientFAST⾓点位置27 orb->detect(img_1,keypoints_1);28 orb->detect(img_2,keypoints_2);2930//第2步:根据⾓点位置计算BRIEF描述⼦31 orb->compute(img_1,keypoints_1,descriptors_1);32 orb->compute(img_2,keypoints_2,descriptors_2);3334 Mat outimg1;35 drawKeypoints(img_1,keypoints_1,outimg1,Scalar::all(-1),DrawMatchesFlags::DEFAULT);36 imshow("1.png的ORB特征点",outimg1);37 Mat outimg2;38 drawKeypoints(img_2,keypoints_2,outimg2,Scalar::all(-1),DrawMatchesFlags::DEFAULT);39 imshow("2.png的ORB特征点",outimg2);4041//第3步:对两幅图像中的BRIEF描述⼦进⾏匹配,使⽤Hamming距离42 vector<DMatch> matches;43//特征匹配的⽅法:暴⼒匹配44 BFMatcher matcher(NORM_HAMMING);45 matcher.match(descriptors_1,descriptors_2,matches);46// for(auto it=matches.begin();it!=matches.end();++it)47// {48// cout<<*it<<" ";49// }50// cout<<endl;5152//第4步:匹配点对筛选53 distance是min_dist5455double min_dist=10000,max_dist=0;5657//找出所有匹配之间的最⼩距离和最⼤距离,即最相似的和最不相似的和最不相似的两组点之间的距离58for(int i=0;i<descriptors_1.rows;++i)59 {60double dist=matches[i].distance;61// cout<<dist<<endl;62if(dist<min_dist) min_dist=dist;63if(dist>max_dist) max_dist=dist;64 }6566 printf("--Max dist:%f\n",max_dist);67 printf("--Min dist:%f\n",min_dist);6869//当描述⼦之间的距离⼤于两倍的最⼩距离时,即认为匹配有误70//但有时候最⼩距离会⾮常⼩,设置⼀个经验值作为下限71 vector<DMatch> good_matches;72for(int i=0;i<descriptors_1.rows;++i)73 {74if(matches[i].distance<=max(2*min_dist,30.0))75 {76 good_matches.push_back(matches[i]);77 }78 }7980//第5步:绘制匹配结果81 Mat img_match;82 Mat img_goodmatch;83 drawMatches(img_1,keypoints_1,img_2,keypoints_2,matches,img_match);84 drawMatches(img_1,keypoints_1,img_2,keypoints_2,good_matches,img_goodmatch);85 imshow("所有匹配点对",img_match);86 imshow("优化后匹配点对",img_goodmatch);87 waitKey(0);8889return0;90 }实验结果:1.png中提取到的特征点2.png中提取到的特征点匹配结果: 所有点对匹配结果 优化后的匹配点对结果(筛选依据是Hamming距离⼩于最⼩距离的两倍)结果分析:尽管在这个例⼦中利⽤⼯程经验优化筛选出正确的匹配,但并不能保证在所有其他图像中得到的匹配都是正确的,所以,在后⾯的运动估计中,还要使⽤去除误匹配的算法。
视觉slam介绍PPT课件

2021
第一讲 视觉SLAM概述
• 相机的本质
• 以二维投影形式记录了三维世界的信息 • 此过程丢掉了一个维度:距离
• 各类相机主要区别:有没有深度信息
• 单目:没有深度,必须通过移动相机产生深度 Moving View Stereo • 双目:通过视差计算深度 Stereo • RGBD:通过物理方法测量深度
• 主流方法:SIFT/SURF/ORB (OpenCV features2d模块)
2021
3.1.1 ORB特征
• 例子:ORB特征
• 关键点:Oriented FAST • 描述:BRIEF
• FAST
• 连续N个点的灰度有明显差异
• Oriented FAST • 在FAST基础上计算旋转
• BRIEF • BRIEF-128:在特征点附近的128次像素比较
整理之:
2021
第二讲 相机模型
• 成像平面到像素坐标
代入 得
2021
第二讲 相机模型
展开形式 矩阵形式
传统习惯
左侧是齐次坐标 中间矩阵称为内参数 右侧是非齐次坐标 内参通常在相机生产之后就已固定
2021
第二讲 相机模型
• 除内参外,相机坐标系与世界坐标系还相差一个变换:
• 这里 R, t 或 T 称为外参 • 外参是SLAM估计的目标
2021
实践 点云拼接
2021
第三讲 视觉里程计
Chapter 3: Visual Odometry
2021
3.1 特征点法
• 经典SLAM模型中以位姿——路标(Landmark)来描述SLAM过程 • 路标是三维空间中固定不变的点,能够在特定位姿下观测到
机器人视觉导航中的SLAM算法应用教程

机器人视觉导航中的SLAM算法应用教程导语:随着人工智能技术的不断发展,机器人逐渐成为各个领域中不可或缺的工具。
机器人视觉导航是机器人实现自主移动和环境感知的关键技术之一。
而同样重要的是,SLAM(Simultaneous Localization and Mapping)算法的应用。
本篇文章将向大家介绍机器人视觉导航中的SLAM算法应用教程,帮助读者了解SLAM算法的原理和应用。
一、什么是SLAM算法SLAM,即同时定位与地图构建,是指在未知环境中,机器人实时地建立自身的地图,并通过自身感知的信息进行定位与路径规划。
SLAM算法是目前机器人自主导航和环境建模的基础。
SLAM算法的核心思想是通过传感器获取环境的感知信息,同时估计机器人自身的位置和姿态,从而实现对环境的建模和导航。
常用的传感器包括摄像头、激光雷达、超声波传感器等。
SLAM算法可以分为基于滤波和基于优化的方法。
滤波方法采用递推的方式在更新机器人位姿和地图,其中常用的滤波算法有扩展卡尔曼滤波(EKF)和粒子滤波(PF)。
优化方法则采用迭代优化的方式,通常使用最小二乘法进行参数优化,如图优化算法和非线性优化算法。
二、机器人视觉导航中SLAM算法的应用场景1. 室内导航机器人在未知的室内环境中实现自主移动和路径规划是目前SLAM算法的主要应用场景之一。
机器人通过摄像头或激光雷达等传感器获取环境的信息,通过SLAM算法实现自身位置和地图的实时更新,从而实现室内导航。
2. 建筑物巡检机器人用于建筑物的巡检和监控是SLAM算法的另一个重要应用场景。
机器人通过将建筑物的平面进行扫描并使用SLAM算法进行建图,可以实时检测建筑物的结构和安全问题,并提供状态反馈和报警。
3. 无人驾驶无人驾驶是SLAM算法的一个热门应用领域。
无人驾驶汽车通过激光雷达和摄像头等传感器获取道路和周围环境的信息,利用SLAM算法实时估计自身的位置和姿态,并规划行驶路径,从而实现自动驾驶。
SLAM_介绍以及浅析
SLAM_介绍以及浅析SLAM(Simultaneous Localization and Mapping),即同时定位与建图,是一种将移动机器人在未知环境中的位置定位与环境地图生成统一起来的技术。
SLAM技术是实现自主导航和智能导航的关键性技术之一,广泛应用于无人车、无人潜艇、无人机、机器人等领域。
SLAM技术分为前端和后端两部分。
前端主要负责机器人的位置定位,根据传感器获取的数据,通过运动估计(例如里程计模型)和感知估计(例如视觉、雷达感知)等方法,计算机器人在运动过程中的位置和姿态。
后端主要负责地图生成,根据机器人在不同时间点的位置估计和传感器获取的环境地图数据,利用优化算法估计机器人的位置和地图。
在前端中,常用的传感器有激光雷达、相机、惯性测量单元(IMU)等。
激光雷达可以提供高精度的距离和角度信息,常用于建立环境地图。
相机能够捕捉到图像信息,通过图像算法可以提取出环境中的特征点,用于定位和建图。
IMU能够提供线性加速度和角速度信息,用以估计机器人的运动。
在后端中,常用的算法有滤波器、优化方法和图优化等。
滤波器方法包括扩展卡尔曼滤波器(EKF)和无迹卡尔曼滤波器(UKF),通过状态估计和协方差矩阵来估计机器人的位置和姿态。
优化方法包括最小二乘法、非线性优化等,通过最小化误差函数来优化机器人的位置估计和地图。
图优化方法使用图模型来描述机器人的位置和环境地图,通过最大化后验概率来估计位置和地图。
SLAM技术的关键挑战之一是数据关联问题。
由于噪声和误差的存在,机器人在不同时刻获取的传感器数据可能不完全匹配。
因此,需要通过数据关联来确定当前获取的数据与之前数据的对应关系。
常用的数据关联方法有最近邻法、滤波法和图优化法等。
最近邻法通过计算不同数据之间的距离来确定对应关系。
滤波法通过滤波器来更新机器人的位置估计,并根据新的数据重新关联。
图优化法通过图模型来描述数据的关联关系,并通过最大后验概率来估计位置和地图。
《视觉SLAM十四讲》课后习题—ch6
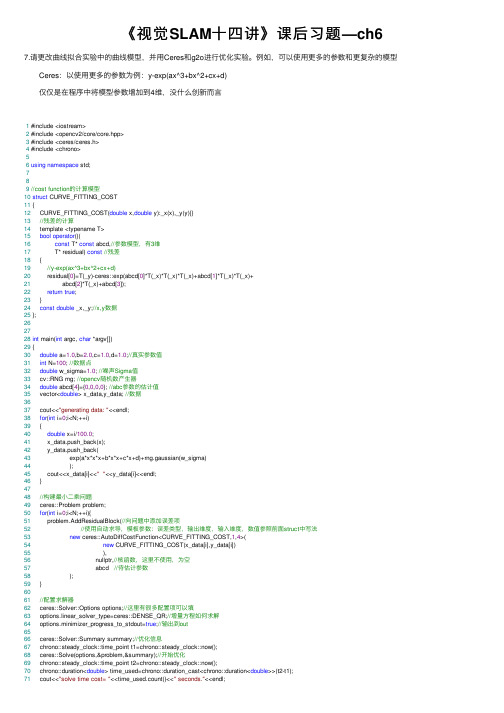
《视觉SLAM⼗四讲》课后习题—ch6 7.请更改曲线拟合实验中的曲线模型,并⽤Ceres和g2o进⾏优化实验。
例如,可以使⽤更多的参数和更复杂的模型 Ceres:以使⽤更多的参数为例:y-exp(ax^3+bx^2+cx+d) 仅仅是在程序中将模型参数增加到4维,没什么创新⽽⾔1 #include <iostream>2 #include <opencv2/core/core.hpp>3 #include <ceres/ceres.h>4 #include <chrono>56using namespace std;789//cost function的计算模型10struct CURVE_FITTING_COST11 {12 CURVE_FITTING_COST(double x,double y):_x(x),_y(y){}13//残差的计算14 template <typename T>15bool operator()(16const T* const abcd,//参数模型,有3维17 T* residual) const//残差18 {19//y-exp(ax^3+bx^2+cx+d)20 residual[0]=T(_y)-ceres::exp(abcd[0]*T(_x)*T(_x)*T(_x)+abcd[1]*T(_x)*T(_x)+21 abcd[2]*T(_x)+abcd[3]);22return true;23 }24const double _x,_y;//x,y数据25 };262728int main(int argc, char *argv[])29 {30double a=1.0,b=2.0,c=1.0,d=1.0;//真实参数值31int N=100; //数据点32double w_sigma=1.0; //噪声Sigma值33 cv::RNG rng; //opencv随机数产⽣器34double abcd[4]={0,0,0,0}; //abc参数的估计值35 vector<double> x_data,y_data; //数据3637 cout<<"generating data: "<<endl;38for(int i=0;i<N;++i)39 {40double x=i/100.0;41 x_data.push_back(x);42 y_data.push_back(43 exp(a*x*x*x+b*x*x+c*x+d)+rng.gaussian(w_sigma)44 );45 cout<<x_data[i]<<""<<y_data[i]<<endl;46 }4748//构建最⼩⼆乘问题49 ceres::Problem problem;50for(int i=0;i<N;++i){51 problem.AddResidualBlock(//向问题中添加误差项52//使⽤⾃动求导,模板参数:误差类型,输出维度,输⼊维度,数值参照前⾯struct中写法53new ceres::AutoDiffCostFunction<CURVE_FITTING_COST,1,4>(54new CURVE_FITTING_COST(x_data[i],y_data[i])55 ),56 nullptr,//核函数,这⾥不使⽤,为空57 abcd //待估计参数58 );59 }6061//配置求解器62 ceres::Solver::Options options;//这⾥有很多配置项可以填63 options.linear_solver_type=ceres::DENSE_QR;//增量⽅程如何求解64 options.minimizer_progress_to_stdout=true;//输出到out6566 ceres::Solver::Summary summary;//优化信息67 chrono::steady_clock::time_point t1=chrono::steady_clock::now();68 ceres::Solve(options,&problem,&summary);//开始优化69 chrono::steady_clock::time_point t2=chrono::steady_clock::now();70 chrono::duration<double> time_used=chrono::duration_cast<chrono::duration<double>>(t2-t1);71 cout<<"solve time cost= "<<time_used.count()<<" seconds."<<endl;7273//输出结果74 cout<<summary.BriefReport()<<endl;75 cout<<"eastimated a,b,c,d= ";76for(auto a:abcd) cout<<a<<"";77 cout<<endl;78return0;79 }运⾏结果为: generating data:0 2.718280.01 2.904290.02 2.074510.03 2.377590.04 4.077210.05 2.594330.06 2.259460.07 3.250260.08 3.499160.09 1.880010.1 3.837770.11 3.066390.12 4.465770.13 1.249440.14 1.361490.15 2.777490.16 2.6230.17 5.327020.18 3.76660.19 2.17730.2 5.162080.21 2.910420.22 1.296550.23 2.301670.24 2.565490.25 3.954110.26 5.4590.27 5.000780.28 4.037680.29 3.883330.3 6.346150.31 4.993920.32 6.039290.33 4.231590.34 4.144030.35 6.218830.36 5.338380.37 5.165940.38 5.450640.39 5.406120.4 7.003210.41 6.616340.42 6.230230.43 7.576960.44 6.021860.45 6.392850.46 7.033930.47 8.666770.48 5.807180.49 8.765480.5 8.156410.51 8.79390.52 9.300430.53 8.562260.54 10.43220.55 10.02040.56 12.28580.57 10.79170.58 10.76250.59 12.790.6 13.22310.61 13.8990.62 13.34770.63 13.91560.64 15.32540.65 14.99430.66 15.79690.67 18.78250.68 19.17310.69 19.8720.7 19.38180.71 23.00330.72 24.15260.73 25.59620.74 25.04040.75 25.95590.76 29.73160.77 30.83040.78 31.28140.79 33.6270.8 36.19120.81 37.66640.82 41.62950.83 43.91260.84 46.7420.85 48.88380.86 54.12650.87 58.21420.88 60.20130.89 65.86820.9 72.31780.91 77.75780.92 82.43110.93 86.74930.94 94.66510.95 98.74120.96 109.8230.97 117.3950.98 128.150.99 135.634iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time0 6.898490e+04 0.00e+00 2.14e+03 0.00e+00 0.00e+00 1.00e+04 0 1.17e-04 2.15e-041 7.950822e+100 -7.95e+100 0.00e+00 5.63e+02 -1.17e+96 5.00e+03 1 1.61e-04 4.42e-042 3.478360e+99 -3.48e+99 0.00e+00 4.95e+02 -5.12e+94 1.25e+03 1 8.29e-05 5.58e-043 3.566582e+95 -3.57e+95 0.00e+00 3.09e+02 -5.30e+90 1.56e+02 1 5.68e-05 6.41e-044 1.183153e+89 -1.18e+89 0.00e+00 1.51e+02 -1.78e+84 9.77e+00 1 5.18e-05 7.13e-045 3.087066e+73 -3.09e+73 0.00e+00 7.00e+01 -4.91e+68 3.05e-01 1 5.72e-05 7.89e-046 4.413641e+31 -4.41e+31 0.00e+00 2.13e+01 -1.04e+27 4.77e-03 1 5.10e-05 8.59e-047 6.604687e+04 2.94e+03 4.98e+03 6.39e-01 1.65e+00 1.43e-02 1 1.23e-04 1.00e-038 5.395798e+04 1.21e+04 1.59e+04 8.07e-01 2.02e+00 4.29e-02 1 1.14e-04 1.13e-039 3.089338e+04 2.31e+04 3.19e+04 5.71e-01 1.62e+00 1.29e-01 1 1.13e-04 1.26e-0310 8.430982e+03 2.25e+04 3.21e+04 3.74e-01 1.30e+00 3.86e-01 1 1.12e-04 1.39e-0311 8.852002e+02 7.55e+03 1.29e+04 1.77e-01 1.08e+00 1.16e+00 1 1.11e-04 1.52e-0312 2.313901e+02 6.54e+02 2.59e+03 4.89e-02 1.01e+00 3.48e+00 1 1.11e-04 1.65e-0313 1.935710e+02 3.78e+01 8.37e+02 2.72e-02 1.01e+00 1.04e+01 1 1.11e-04 1.77e-0314 1.413188e+02 5.23e+01 6.05e+02 6.43e-02 1.01e+00 3.13e+01 1 1.11e-04 1.90e-0315 8.033187e+01 6.10e+01 3.36e+02 1.08e-01 1.01e+00 9.39e+01 1 1.11e-04 2.03e-0316 5.660145e+01 2.37e+01 7.69e+01 9.43e-02 9.99e-01 2.82e+02 1 1.11e-04 2.15e-0317 5.390796e+01 2.69e+00 1.52e+01 5.86e-02 9.97e-01 8.45e+02 1 1.18e-04 2.29e-0318 5.233724e+01 1.57e+00 9.31e+00 9.73e-02 9.96e-01 2.53e+03 1 1.12e-04 2.42e-0319 5.125192e+01 1.09e+00 3.58e+00 1.21e-01 9.98e-01 7.60e+03 1 1.11e-04 2.54e-0320 5.098190e+01 2.70e-01 1.08e+00 9.37e-02 1.00e+00 2.28e+04 1 1.25e-04 2.68e-0321 5.086440e+01 1.18e-01 6.49e-01 1.47e-01 1.00e+00 6.84e+04 1 1.28e-04 2.84e-0322 5.070258e+01 1.62e-01 4.62e-01 2.86e-01 1.00e+00 2.05e+05 1 1.12e-04 2.97e-0323 5.059978e+01 1.03e-01 2.40e-01 3.30e-01 1.00e+00 6.16e+05 1 1.11e-04 3.09e-0324 5.058282e+01 1.70e-02 7.40e-02 1.68e-01 1.00e+00 1.85e+06 1 1.11e-04 3.22e-0325 5.058233e+01 4.94e-04 1.16e-02 3.17e-02 1.00e+00 5.54e+06 1 1.25e-04 3.36e-03solve time cost= 0.00346683 seconds.Ceres Solver Report: Iterations: 26, Initial cost: 6.898490e+04, Final cost: 5.058233e+01, Termination: CONVERGENCE eastimated a,b,c,d= 0.796567 2.2634 0.969126 0.969952与我们设定的真值a=1,b=2,c=1,d=1相差不多。
【视觉SLAM十四讲】直接法视觉里程计
2 LK 光流(5分,约3小时)2.1光流文献综述(1分)我们课上演示了Lucas-Kanade 稀疏光流,用OpenCV 函数实现了光流法追踪特征点。
实际上,光流法有很长时间的研究历史,直到现在人们还在尝试用Deeplearning 等方法对光流进行改进[1,2]。
本题将指导你完成基于Gauss-Newton 的金字塔光流法。
首先,请阅读文献[3](paper 目录下提供了pdf ),回答下列问题。
问题:1. 按此文的分类,光流法可分为哪几类?答:作者在文中对光流法按照两种不同的方法进行分类。
➢ 按照估计的是参数的叠加增量还是增量Warp 将光流法分为叠加(additional)和组合(compositional)算法➢ 按照Warp 更新规则可以将光流法分为前向(forward )和逆向/反向(inverse)两种算法综上:可以分4类,分别是 FA(Forward Additional), FC(Forward Composition), (Inverse Additional) 和 IC(Inverse Compositional)。
2. 在compositional 中,为什么有时候需要做原始图像的wrap ?该wrap 有何物理意义?答: 与Lucas-Kanade 算法中那样简单地将迭代的更新 p ∆添加到当前估计的参数p 不同,组合(compositional )算法中,对扭曲();W x p ∆的增量更新必须由Warp 的当前估计组成() ;Wx p 。
这两个 warp 的组合可能更复杂。
因此,我们对 warp 集合有两个要求: 1)warp 集合必须包含 identity warp 。
2)warp 集合必须在组合运算中闭合。
需要在当前位姿估计之前引入增量式 warp (incremental warp )以建立半群约束要求(the semi-group requirement )。
SLAM入门之视觉里程计(6):相机标定张正友经典标定法详解
SLAM ⼊门之视觉⾥程计(6):相机标定张正友经典标定法详解想要从⼆维图像中获取到场景的三维信息,相机的内参数是必须的,在SLAM 中,相机通常是提前标定好的。
张正友于1998年在论⽂:"A Flexible New Technique fro Camera Calibration"提出了基于单平⾯棋盘格的相机标定⽅法。
该⽅法介于传统的标定⽅法和⾃标定⽅法之间,使⽤简单实⽤性强,有以下优点:不需要额外的器材,⼀张打印的棋盘格即可。
标定简单,相机和标定板可以任意放置。
标定的精度⾼。
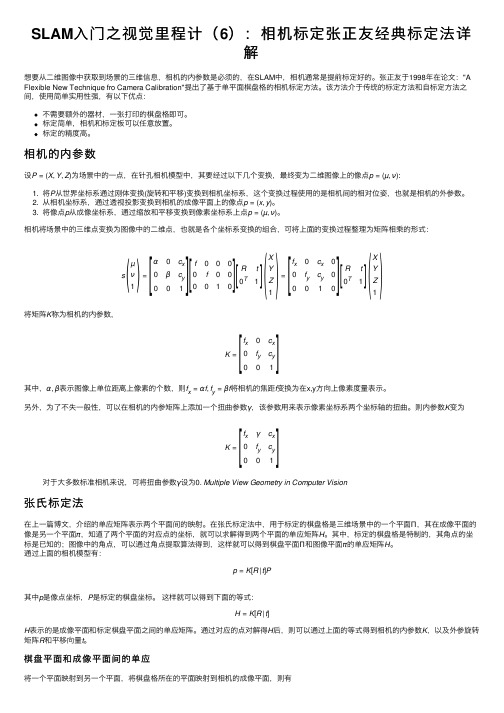
相机的内参数设P =(X ,Y ,Z )为场景中的⼀点,在针孔相机模型中,其要经过以下⼏个变换,最终变为⼆维图像上的像点p =(µ,ν):1. 将P 从世界坐标系通过刚体变换(旋转和平移)变换到相机坐标系,这个变换过程使⽤的是相机间的相对位姿,也就是相机的外参数。
2. 从相机坐标系,通过透视投影变换到相机的成像平⾯上的像点p =(x ,y )。
3. 将像点p 从成像坐标系,通过缩放和平移变换到像素坐标系上点p =(µ,ν)。
相机将场景中的三维点变换为图像中的⼆维点,也就是各个坐标系变换的组合,可将上⾯的变换过程整理为矩阵相乘的形式:s µν1=α0c x 0βc y1f 0000f 0001R t 0T1X Y Z1=f x 0c x 00f yc y 001Rt 0T1X Y Z1将矩阵K 称为相机的内参数,K =f x0c x 0f yc y 001其中,α,β表⽰图像上单位距离上像素的个数,则f x =αf ,f y =βf 将相机的焦距f 变换为在x,y ⽅向上像素度量表⽰。
另外,为了不失⼀般性,可以在相机的内参矩阵上添加⼀个扭曲参数γ,该参数⽤来表⽰像素坐标系两个坐标轴的扭曲。
则内参数K 变为K =f xγc x 0f yc y 01对于⼤多数标准相机来说,可将扭曲参数γ设为0. Multiple View Geometry in Computer Vision张⽒标定法在上⼀篇博⽂,介绍的单应矩阵表⽰两个平⾯间的映射。
视觉SLAM综述

通过基于光束平差法 ( Bundle Adjustment,BA) 的图优化理论估计相机的 位姿和地图点坐标,大大 提高了 SLAM 的精度。
目前,基于关键帧的VSLAM成为主流算法。最具代表性的有 两种: 一种是 LSD-SLAM [6] ,属于半稠密的单目的 VSLAM; 一 种是 ORB-SLAM [7,8] ,属于稀疏的 VSLAM。
3、稠密VSLAM
为了降低稠密地图的计算量,Engel J[12,13]提出了半稠 密地图(semi-direct visual odometry,SVO),通过结 合关键点的思想和直接配准的方法,大大降低了计算复 杂度。目前最先进的SVO就是Engel J等提出的LSDSLAM[13],已经能在CPU上实现了实时性。
什么是SLAM?
SLAM问题可以描述为: 机器人在未知环境中从一个未知 位置开始移动,在移动过程中根据位置估计和地图进行 自身定位,同时在自身定位的基础上建造增量式地图, 实现机器人的自主定位和导航。
(1)定位(localization):机器人必须知道自己在环境中位 置。 (2)建图(mapping):机器人必须记录环境中特征的位置 (如果知道自己的位置)
后端图优化流程
2.3 后端优化
2.4 建图
在经典的VSLAM模型中,所谓的建图,即找到所有路标 点,这些路标点的集合即是最终的地图,一旦确定了路 标点的位置,即可以说完成了建图。地图类型分为栅格 地图,拓扑地图,特征地图和混合地图。根据建图需求 不同,可以将建图用途分为两类:
定位:把地图下来,机器人下次开机后仍然能在地图上 定位,不需要再次建模,此类地图,稀疏地图即可完成。
1.2 地图的稠密程度
【转】SLAM视觉SLAM中的后端:后端优化算法与建图模板

【转】SLAM视觉SLAM中的后端:后端优化算法与建图模板前⾯的话前⾯系列⼀中我们介绍了,VSLAM 是利⽤多视图⼏何理论,根据相机拍摄的图像信息对相机进⾏定位并同时构建周围环境地图。
按照相机的分类,有单⽬、双⽬、 RGBD、鱼眼、全景等。
同时,VSLAM 主要包括视觉⾥程计(visual odometry, VO)、后端优化、回环检测、建图。
VSLAM 前端为视觉⾥程计和回环检测,相当于是对图像数据进⾏关联;后端是对前端输出的结果进⾏优化,利⽤滤波或⾮线性优化理论,得到最优的位姿估计和全局⼀致性地图。
前⾯已经介绍了VSLAM的前端:视觉⾥程计和回环检测,这次我们将介绍系列⼆:VSLAM中的后端优化和建图。
接下来,我们将详细介绍。
2 后端:最优化位姿估计和全局⼀致性地图2.1 后端优化SLAM 的后端求解⽅法可⼤致分为两⼤类,⼀类是基于滤波器的⽅法;另⼀类则是⾮线性优化⽅法。
这是根据假设的不同,如果假设马尔可夫性, K 时刻状态只与 K-1 时刻状态有关,⽽与之前的状态⽆关,这样会得到以扩展卡尔曼滤波(EKF)为代表的滤波器⽅法。
在滤波⽅法中,本⽂会从某时刻的状态估计推导到下⼀个时刻。
另外⼀种⽅法是考虑K 时刻与之前所有状态的关系,这将得到⾮线性优化为主体的优化框架。
2.1.1 滤波⽅法由于SLAM 本质上是⼀个状态估计问题,该问题可以归结为⼀个运动⽅程和⼀个观测⽅程,顺理成章地把 SLAM 融⼊到滤波框架中。
早期的SLAM 研究基本都是在滤波器的框架下。
在假定从 0 到 t 时刻的观测信息以及控制信息已知的条件下,对系统状态的后验概率进⾏估计,根据后验概率表⽰⽅式的不同,存在多种基于滤波器的⽅法,如扩展卡尔曼滤波(EKF)⽅法、粒⼦滤波(PF)等。
1.卡尔曼滤波(KF)Kalman滤波算法的本质就是利⽤两个正态分布的融合仍是正态分布这⼀特性进⾏迭代⽽已。
步骤⼀:⽤上⼀次的最优状态估计和最优误差估计去计算这⼀次的先验状态估计和先验误差估计。
视觉SLAM十四讲-第六讲-非线性优化说课讲解
• 能否回避Hessian的计算?
• Gauss-Newton • Levenberg-Marquadt
20 6.2 非线性最小二乘
• Gauss-Newton
• 一阶近似 f(x): • 平方误差变为:
4 第六讲 非线性优化
• 上讲回顾
• 三维世界中刚体运动的描述:旋转矩阵、旋转向量、欧拉角、四元数等。 • 观测:相机投影模型。
在给定模型和具体观测时,如何对估计 进行优化?
5
6.1状态估计问题
6 6.1状态估计问题
• 状态估计问题
• 最简单情况:线性系统,高斯噪声 • 复杂情况:非线性系统,非高斯噪声
• 该问题有何结构?
• 由许多个误差的平方和(或Sigma范数和)组成。 • 虽然总体维度高,但每个项很简单,只关联2个变量。 • 如果用李代数表达位姿,那么是无约束优化问题。
• 如何求解?
• 下面先来介绍通用的非线性最小二乘问题。
14
6.2 非线性最小二乘
15 6.2 非线性最小二乘
• 先考虑简单的问题:
7 6.1状态估计问题
• 历史上很长一段时间使用滤波器求解状态估计 • 但近年非线性优化已成为主流 • 我们首先来分析一下如何从概率角度看待此问题
8 6.1状态估计问题
• 状态变量(所有待求解的量)
• 状态估计等同于求解条件分布:
类似的,这里z,u也是统称
• 考虑更简单的情况:只有观测时,类似于Structure from Motion (SfM)
这里
• 当 f 很简单时:
• 解:
视觉SLAM十四讲——LK光流

视觉SLAM⼗四讲——LK光流主要内容 直接法是从光流演变⽽来的。
光流(Optical Flow)描述了像素在图像中的运动,⽽直接法则附带着⼀个相机的运动模型。
1. 定义 描述像素随时间在像素中运动的⽅法,追踪像素在图像中运动。
追踪部分像素或全部像素分为稀疏光流和稠密光流,稀疏光流以Lucas-Kanade光流为代表,可以在SLAM中跟踪特征点的位置。
(避免随时间在两两图像之间进⾏特征点提取匹配,减少计算量,光流本省匹配需要⼀定的时间,跟踪以后可以直接⽤像素坐标信息,使⽤对极⼏何、PnP和ICP算法估计相机运动)2. LK光流 [P186-187] 1)灰度不变假设:同⼀空间点的像素灰度值,在各个图像中是固定不变的。
2) 理论公式:(两个变量的⼀次⽅程) 分别表⽰:在像素点x⽅向的梯度,像素点在x⽅向的运动速度,在像素点y⽅向的梯度,像素点在y⽅向上的梯度,像素点灰度随时间的变化量。
3)在LK光流中,我们假设某⼀个窗⼝内的像素具有相同的运动。
窗⼝⼤⼩w*w,则共有w2个⽅程。
最⼩⼆乘求解(由于像素梯度仅在局部有效,所以如果⼀次迭代不够好,可以多迭代⼏次这个⽅程)3. 光流特点 1)⾓点具有更好的辨识度,边缘次之,区块最少 2)光流法本⾝计算需要⼀定的时间,在具体SLAM系统的应⽤,根据测试进⾏选择 3)LK光流跟踪能够直接得到特征点的对应关系,实际应⽤会出现特征点跟丢的情况,不太会遇到误匹配(相对于描述⼦的⼀点优势) 4)描述⼦匹配在相机运动较⼤时仍能成功,光流必须要求相机运动是微⼩的(采集频率较⾼)。
光流的健壮性相⽐描述⼦差。
4. 代码关键点 1)根据associate.txt匹配时间点的信息,读取图像及深度信息, 2)遍历图像,第⼀幅图像提取FAST的特征点,后继续的图像利⽤光流跟踪这些特征点,删除跟踪失败的特征点 3)光流法函数调⽤: cv::calcOpticalFlowPyrLK (包括参数的调⽤,返回的结果信息等) 4)每⼀帧图像跟踪出来的特征点进⾏显⽰ 5)注意光流跟踪的点数以及光流计算耗费的时间信息参考链接代码#include <iostream>#include <fstream>#include <list>#include <vector>#include <chrono>using namespace std;#include <opencv2/core/core.hpp>#include <opencv2/highgui/highgui.hpp>#include <opencv2/features2d/features2d.hpp>#include <opencv2/video/tracking.hpp>int main( int argc, char** argv ){if ( argc != 2 ){cout<<"usage: useLK path_to_dataset"<<endl;return1;}string path_to_dataset = argv[1];string associate_file = path_to_dataset + "/associate.txt";ifstream fin( associate_file );if ( !fin ){cerr<<"I cann't find associate.txt!"<<endl;return1;}string rgb_file, depth_file, time_rgb, time_depth;list< cv::Point2f > keypoints; // 因为要删除跟踪失败的点,使⽤listcv::Mat color, depth, last_color;for ( int index=0; index<100; index++ ){fin>>time_rgb>>rgb_file>>time_depth>>depth_file;color = cv::imread( path_to_dataset+"/"+rgb_file );depth = cv::imread( path_to_dataset+"/"+depth_file, -1 );if (index ==0 ){// 对第⼀帧提取FAST特征点vector<cv::KeyPoint> kps;cv::Ptr<cv::FastFeatureDetector> detector = cv::FastFeatureDetector::create();detector->detect( color, kps );for ( auto kp:kps )keypoints.push_back( kp.pt );last_color = color;continue;}if ( color.data==nullptr || depth.data==nullptr )continue;// 对其他帧⽤LK跟踪特征点vector<cv::Point2f> next_keypoints;vector<cv::Point2f> prev_keypoints;for ( auto kp:keypoints )prev_keypoints.push_back(kp);vector<unsigned char> status;vector<float> error;chrono::steady_clock::time_point t1 = chrono::steady_clock::now();cv::calcOpticalFlowPyrLK( last_color, color, prev_keypoints, next_keypoints, status, error );chrono::steady_clock::time_point t2 = chrono::steady_clock::now();chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>( t2-t1 ); cout<<"LK Flow use time:"<<time_used.count()<<" seconds."<<endl;// 把跟丢的点删掉int i=0;for ( auto iter=keypoints.begin(); iter!=keypoints.end(); i++){if ( status[i] == 0 ){iter = keypoints.erase(iter);continue;}*iter = next_keypoints[i];iter++;}cout<<"tracked keypoints: "<<keypoints.size()<<endl;if (keypoints.size() == 0){cout<<"all keypoints are lost."<<endl;break;}// 画出 keypointscv::Mat img_show = color.clone();for ( auto kp:keypoints )cv::circle(img_show, kp, 10, cv::Scalar(0, 240, 0), 1);cv::imshow("corners", img_show);cv::waitKey(0);last_color = color;}return0;}结果及分析LK Flow use time:0.186846 seconds. //t1 ,对应下⾯的第⼀幅图tracked keypoints: 1749LK Flow use time:0.189048 seconds.tracked keypoints: 1742LK Flow use time:0.232017 seconds.tracked keypoints: 1703LK Flow use time:0.17844 seconds.tracked keypoints: 1676LK Flow use time:0.234777 seconds.tracked keypoints: 1664LK Flow use time:0.185145 seconds.tracked keypoints: 1656LK Flow use time:0.186722 seconds.tracked keypoints: 1641LK Flow use time:0.177791 seconds. // t2,对应下⾯的第⼆幅图tracked keypoints: 1634 结果分析: 1)根据输出结果,随着时间,相机姿态发⽣了⽐较⼤的旋转变化,跟踪的特征点数也从1749点下降到1634点; 2)从图中可以看出,随着图像视⾓的旋转,有些特征消失,新进来的特征点⽆法跟踪(可能需要对新进来的该部分特征重新进⾏提取,不然随着⾓度更⼤的时候,特征点可能完全丢失,⽆法进⾏位姿的解算)。
视觉SLAM十四讲——对极约束求解相机运动(2D-2D)

视觉SLAM⼗四讲——对极约束求解相机运动(2D-2D)主要内容1. 对极约束 ⼏何意义是,P,三者共⾯,对极约束同时包含了平移和旋转。
基础矩阵: 本质矩阵: 对极约束表⽰: 其中,分别表⽰为相机坐标系下归⼀化的平⾯坐标2. 本质矩阵的特点(3×3) 1)E在不同尺度下是等价的 2) 内在性质:奇异值必定是的形式 3)由于平移+旋转,共有6个⾃由度,但因为尺度等价性,E实际上有5个⾃由度3 本质矩阵求解——⼋点法 1) E的内在性质是⼀种⾮线性性质,在求解线性⽅程时会带来⿇烦,因此不会⽤5对点来求解。
2)未知数共有9个,只考虑尺度等价性,所以⽤8对2D-2D点来求解,线性变换的⽅法。
3)求解矩阵后,进⾏奇异值分解分(SVD),得到运动信息 4)分解的时候,会有4中情况,选取⼀个点进⾏求解,检测该点在两个相机下的深度信息,选取两个正的深度。
5)线性⽅程解可能不满⾜E的内在性质,将求解出来的矩阵投影到E所在的流形上。
4 单应矩阵H 定义与旋转,平移及平⾯的参数有关。
1) ⾃由度为8的单应矩阵可以通过4对匹配点进⾏计算(注意,这些特征点不能有三点共线的情况) 2)求解⽅法:直接线性变换法,对其进⾏分解得到运动信息,分解⽅法有数值法和解析法 4组解,(根据计算点的深度以及平⾯的法向量信息选取合理的解) 3)意义 3.1)描述了两个平⾯之间的映射关系,若所有特征点落在同⼀平⾯,则可以通过H估计运动, 具体应⽤在⽆⼈机携带俯视相机或扫地机器⼈的顶视相机中。
3.2)当特征点共⾯或者相机发⽣纯旋转时,基础矩阵⾃由度下降,H可以估计纯旋转的运动信息。
5. 在实际应⽤,为避免退化现象造成的影响,会同时估计F和H,选择其中重投影误差⽐较⼩的那个作为最终运动的估计结果。
6. 对极⼏何2D-2D的特点 1)尺度不确定性 t归⼀化相当于固定了尺度信息,成为单⽬SLAM的初始化,后⾯的轨迹和地图以此单位进⾏计算。
视觉slam的介绍
•
称为极点
• 实践当中:
•
通过特征匹配得到,P未知,
•
待求(本质矩阵、单应矩阵)
未知
3.3 三角化
• 已知运动时,求解特征点的3D位置 • 几何关系: • 求 时,两侧乘
• 反之亦然
• 或者同时解
•求
的最小二乘解
3.4 PNP
• 已经3D点的空间位置和相机上的投影点, 求相机的旋转和平移(外参)
3.5 光流
• 设 t 时刻位于 x,y 处像素点的灰度值为 • 在 t+dt 时刻,该像素运动到了
• 希望计算运动 dx, dy
• 灰度不变假设: • 注意:灰度不变是一种理想的假设,实际当中由于高光/阴影/材质/曝光等不同,很
可能不成立。
3.5 光流
• 对 t+dt 时刻的灰度进行Taylor展开并保留一阶项:
• 由于灰度不变,所以
• 希望求解dx/dt, dy/dt
因此 =>
x方向梯度
随时间变化
y方向梯度
3.5 光流
• 但本式是一个二元一次线性方程,欠定
• 需要引用额外的约束
• 假定一个窗口(w ´ w)内光度不变:
• 通过超定最小二乘解求得运动 u,v
3.5 光流
最后,我们可以通过光流跟踪的特征的,用PnP、ICP或对极几何来估计 相机运动。总而言之,光流法可以加速基于特征点的视觉里程计算法,避免计 算和匹配描述子的过程,但要求相机运动较慢(或采集频率较高)。
• 相机
• 以一定速率采集图像,形成视频
• 分类
• 单目 Monocular • 双目 Stereo • 深度 RGBD • 其他 鱼眼 全景 Event Camera, etc.
基于视觉的slam算法流程

基于视觉的slam算法流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!基于视觉的 SLAM 算法流程一般包括以下几个主要步骤:1. 传感器数据采集:使用相机等视觉传感器获取环境的图像序列。
视觉SLAM从理论到实践相机模型与非线性优化

视觉SLAM从理论到实践相机模型与非线性优化视觉SLAM(Simultaneous Localization and Mapping)是一种通过使用摄像机或摄像头进行环境感知和自主定位的技术。
它可以同时实现对周围环境的三维建模和自身位置的估计,被广泛应用于机器人导航、增强现实、无人驾驶等领域。
视觉SLAM的核心是相机模型和非线性优化。
相机模型是视觉SLAM中的重要理论基础。
它描述了摄像机的内部参数(内参)和外部参数(外参)。
内参包括焦距、像素尺寸、光学中心等,外参则是摄像机相对于世界坐标系的位姿信息。
相机模型将三维空间中的点投影到二维图像平面上,从而实现了从像素坐标到世界坐标的转换。
常用的相机模型有针孔模型、透视模型等。
相机模型的正确建模对于准确的物体定位和三维重建至关重要。
非线性优化是实现视觉SLAM的关键技术之一、在实际应用中,相机姿态和地图点的估计往往是不精确的,同时噪声和误差也会影响到估计的准确性。
非线性优化的目标是通过最小化观测误差来找到最优的相机姿态和地图点的估计值。
这个过程涉及到迭代最小二乘(Iterative Closest Point, ICP)、非线性优化方法(如高斯牛顿法、Levenberg-Marquardt算法)等。
通过迭代优化,可以不断更新估计值,从而提高SLAM系统的准确性和稳定性。
视觉SLAM的实践涉及到多个方面。
首先,需要进行相机标定,即确定相机的内外参数。
这可以通过特定的标定板和相机标定算法来实现。
其次,需要通过视觉特征提取和匹配来进行视觉里程计计算,得到相机的位移估计。
常用的特征包括角点、边缘、拐点等。
匹配算法可采用基于特征描述子的方法,如SIFT、SURF等。
然后,利用非线性优化算法对位姿进行优化,同时进行地图点的三维重建。
最后,可以通过回环检测来进一步提高SLAM系统的准确性和鲁棒性。
回环检测是指当相机经过之前经过的区域时,能够检测到这一回环并进行相应的调整,从而提高位姿估计的准确性。
视觉SLAM十四讲 第六讲 非线性优化
注 意 这 里 是 对 平 方 展 开 的
雅可比 海塞
• 若只保留一阶梯度:
增量的方向: (通常还需要计算步长)
• 称为最速下降法(Steepest Method)
18 6.2 非线性最小二乘
• 若保留二阶梯度:
• 则得到(令上式关于
的导数为零):
• 该方法又称为牛顿法
19 6.2 非线性最小二乘
• 解: 将得到极值点或鞍点,比较这些解即可
这里
,f 为任意函数
• 当 f 复杂时:
• df/dx难求,或df/dx=0很难解
• 使用迭代方式求解
16 6.2 非线性最小二乘
• 迭代方式:
问题:如何确定这个增量?
17 6.2 非线性最小二乘
• 确定增量的方法(即梯度下降策略):一阶的或二阶的 • 泰勒展开:
2462非线性最小二乘?lm相比于gn能够保证增量方程的正定性?即认为近似只在一定范围内成立如果近似不好则缩小范围?从增量方程上来看可以看成一阶和二阶的混合?参数控制着两边的权重25????62非线性最小二乘?小结?非线性优化是个很大的主题研究者们为之奋斗多年?主要方法
视觉SLAM十四讲
从理论到实践
• 目前没有非凸问题的通用最优值的寻找办法 • 问题凸时,二阶方法通常一两步就能收敛
27
5.3 实践:CERES
28 5.3 实践:CERES
• Google Ceres Solver
• 通用最小二乘问题求解库
• 最一般的形式(带边界的核函数最小二乘)
• f 在Ceres中称为代价函数(Cost Function),x称为参数块(Parameter Block)
7 6.1状态估计问题
《视觉SLAM十四讲》第六讲g2o实践代码报错解决方法

《视觉SLAM十四讲》第六讲g2o实践代码报错解决方法https:///xueyuanaichiyu/p/7921382.html 问题:首先贴出报错部分代码:typedef g2o::BlockSolver g2o::BlockSolverTraits3,1> > Block;Block::LinearSolverType* linearSolver = newg2o::LinearSolverDense::PoseMatrixType>();Block* solver_ptr = new Block( linearSolver );g2o::OptimizationAlgorithmLevenberg* solver = newg2o::OptimizationAlgorithmLevenberg( solver_ptr );g2o::SparseOptimizer optimizer;optimizer.setAlgorithm( solver );optimizer.setVerbose( true );按照书上的例程编写代码,编译时报错(部分截图)如下:/home/wxy/slambook/useg2o/main.cpp:77:49: error: no matchingfunction for call to ‘g2o::BlockSolver::BlockSolverTraits3, 1> >::BlockSolver(g2o::BlockSolver::BlockSolverTraits3,1> >::LinearSolverType*&)’Block* solver_ptr = new Block( linearSolver );^/home/wxy/slambook/useg2o/main.cpp:77:49: note: candidate is:In file included from/usr/local/include/g2o/core/block_solver.h:199:0,from/home/wxy/slambook/useg2o/main.cpp:4:/usr/local/include/g2o/core/block_solver.hpp:40:1: note:g2o::BlockSolver::BlockSolver(std::unique_ptrTraits::LinearSolverType>) [with Traits =g2o::BlockSolverTraits3, 1>; typenameTraits::LinearSolverType = g2o::LinearSolver::Matrix, 3, 3> >]BlockSolver::BlockSolver(std::unique_ptr linearSolver)好像是编译器无法找到某个函数,或者某个调用出错。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 平方误差变为:
• 令关于
导数为零:
21 6.2 非线性最小二乘
• G-N用J的表达式近似了H • 步骤:
22 6.2 非线性最小二乘
• Gauss-Newton简单实用,但 当中无法保证H可逆(二次近似不可靠)
• Levenberg-Marquadt 方法一定程度上改善了它
24 6.2 非线性最小二乘
• Trust Region内的优化,利用Lagrange乘子转化为无约束:
• 仍参照G-N展开,增量方程为:
• 在Levenberg方法中,取D=I,则:
25 6.2 非线性最小二乘
• LM相比于GN,能够保证增量方程的正定性
• 即,认为近似只在一定范围内成立,如果近似不好则缩小范围
7 6.1状态估计问题
• 历史上很长一段时间使用滤波器求解状态估计 • 但近年非线性优化已成为主流
• 我们首先来分析一下如何从概率角度看待此问题
8 6.1状态估计问题
• 状态变量(所有待求解的量)
• 状态估计等同于求解条件分布:
类似的,这里z,u也是统称
• 考虑更简单的情况:只有观测时,类似于Structure from Motion (SfM) • 贝叶斯法则:
• G-N属于线搜索方法:先找到方向,再确定长度
• L-M属于信赖区域方法(Trust Region),认为近似只在区域内可靠
• 考虑近似程度的描述
实际下降/近似下降
• 若太小,则减小近似范围 • 若太大,则增加近似范围
23 6.2 非线性最小二乘
• 改进版的G-N:
这些都是经验值
Levenberg令D=I,即 取一个球,Marquardt 令D取非负对角阵,即 椭球
• 目前没有非凸问题的通用最优值的寻找办法 • 问题凸时,二阶方法通常一两步就能收敛
27
ogle Ceres Solver
• 通用最小二乘问题求解库
• 最一般的形式(带边界的核函数最小二乘)
• f 在Ceres中称为代价函数(Cost Function),x称为参数块(Parameter Block)
9 6.1状态估计问题
• P(x|z) 条件分布很难求解,但可以求:
a) 最大后验估计(Maximize a Posterior,MAP)
b) 最大似然估计(Maximize Likelihood Estimation, MLE)
“在哪种状态下,最容易产生当前的观测”
10 6.1状态估计问题
• 从最大似然到最小二乘
注 意 这 里 是 对 平 方 展 开 的
雅可比 海塞
• 若只保留一阶梯度:
增量的方向: (通常还需要计算步长)
• 称为最速下降法(Steepest Method)
18 6.2 非线性最小二乘
• 若保留二阶梯度:
• 则得到(令上式关于
的导数为零):
• 该方法又称为牛顿法
19 6.2 非线性最小二乘
• 我们把状态最大似然估计变成了最小二乘问题 • 对于原问题:
定义误差:
• 最小化误差的二范数:min
13 6.1状态估计问题
• 直观解释
• 由于噪声的存在,当我们把估计的轨迹与地图代入SLAM的运动、观测方程中时,它们 并不会完美的成立。 • 此时就调整状态的估计,使得误差最小化
• 该问题有何结构?
视觉SLAM十四讲
从理论到实践
高翔 清华大学 2016年冬
2
第六讲 非线性优化
Chapter 6: Non-linear Optimization
3 第六讲 非线性优化
• 本讲目标
• 理解最小二乘法的含义和处理方式。
• 理解Gauss-Newton, Levenburg-Marquadt等下降策略。
• 最速下降法和牛顿法虽然直观,但实用当中存在一些缺点
• 最速下降法会碰到zigzag问题(过于贪婪)
• 牛顿法迭代次数少,但需要计算复杂的Hessian矩阵
• 能否回避Hessian的计算?
• Gauss-Newton • Levenberg-Marquadt
20 6.2 非线性最小二乘
• Gauss-Newton
• 由许多个误差的平方和(或Sigma范数和)组成。
• 虽然总体维度高,但每个项很简单,只关联2个变量。
• 如果用李代数表达位姿,那么是无约束优化问题。
• 如何求解?
• 下面先来介绍通用的非线性最小二乘问题。
14
6.2 非线性最小二乘
15 6.2 非线性最小二乘
• 先考虑简单的问题: • 当 f 很简单时:
• 从增量方程上来看,可以看成一阶和二阶的混合
• 参数 控制着两边的权重
26 6.2 非线性最小二乘
• 小结
• 非线性优化是个很大的主题,研究者们为之奋斗多年
• 主要方法:最速下降、牛顿、G-N、L-M、DogLeg等
• 与线性规划不同,非线性需要针对具体问题具体分析 • 问题非凸时,对初值敏感,会陷入局部最优
• 解: 将得到极值点或鞍点,比较这些解即可
这里
,f 为任意函数
• 当 f 复杂时:
• df/dx难求,或df/dx=0很难解
• 使用迭代方式求解
16 6.2 非线性最小二乘
• 迭代方式:
问题:如何确定这个增量?
17 6.2 非线性最小二乘
• 确定增量的方法(即梯度下降策略):一阶的或二阶的 • 泰勒展开:
• 例子:某次观测
• 由于噪声是高斯的:
• 于是
• 现在要求x,y的最大似然估计,怎么求?
11 6.1状态估计问题
• 一般的高斯分布:
• 负对数形式:
• 原问题的最大化,相当于负对数最小化 • 因此,关于原问题的最大似然: • 相当于最小化:
这货就是所谓的最小二乘
最小化x时,只和它有关
12 6.1状态估计问题
• 学习Ceres库和g2o库的基本使用方法。
4 第六讲 非线性优化
• 上讲回顾
• 三维世界中刚体运动的描述:旋转矩阵、旋转向量、欧拉角、四元数等。
• 观测:相机投影模型。
在给定模型和具体观测时,如何对估计 进行优化?
5
6.1状态估计问题
6 6.1状态估计问题
• 状态估计问题
• 最简单情况:线性系统,高斯噪声 • 复杂情况:非线性系统,非高斯噪声
29 5.3 实践:CERES
• 实验:曲线拟合 • 设曲线方程:
• 我们得到一些带噪声的样本数据:x, y
• 希望拟合(回归)曲线参数:a, b, c
30
31
5.4 实践:G2O
32 5.4 实践:G2O
• G2O中以图模型表达上述最小二乘问题
曲线拟合实验