ACC自适应巡航系统复习进程
汽车辅助系统速记口诀

汽车辅助系统速记口诀
1、紧急刹车辅助系统EBA:看到(EB)找刹车/制动。
2、自动刹车辅助系统AEB:A在最前是自动,没在最后是辅助。
3、电子制动力分配系统EBD。
4、偏离预警系统LDW偏离了:说明走歪(W)了。
5、自适应巡航系统ACC:看到巡字,有点像(CC)。
6、实时交通信息系统TMC︰有交通先找(T),有识别再找。
7、交通标志识别系统TSR:(S)。
8、前方碰撞预警系统FCW:碰撞预警是为防(F)止碰撞。
9、自动变道辅助系统ALC:在最前是自动,变道是在路(L)上。
10、盲点监测系统BSD:盲点监测是为保(B)安全。
11、牵引力控制系统TCS/ASR/TRd:看到牵引,找最长答案。
12、车身稳定控制系统ESP:看到稳定,找平(P)稳。
怕很多新手司机记不住这几个单位,于是老司机自动挡速记口诀:P停,R倒,N空,D走,S飙,L爬,不知道大家记住了吗?其实没
记住也没有关系,只要大家多熟悉几次挡位,在练习的时候多动一下挡位就可以了,俗话说得好,肌肉记忆是最好的记忆方法。
ACC自适应巡航控制系统介绍
ACC自适应巡航控制系统介绍
本文是关于ACC自适应巡航控制系统的介绍,罗孚从个人视角出发,描述对ACC系统的理解,以及在一些使用场景下的思考。
什么是ACC?
ACC系统是在定速巡航装置的基础上发展而来的,区别在于定速巡航只能限定速度,方向盘和刹车还需要驾驶员控制,而ACC能够较好的帮助驾驶员协调方向盘和刹车。
定速巡航算是L1级别的自动驾驶,而ACC则可以算是L2级别的自动驾驶。
ACC主要有两个参数,车速和距离。
如果“前面没车”,那么可以使用驾驶员设定的期望车速来行车,这与定速巡航功能相当,如果配合车道保持LKA系统,可以做到沿当前车道一直行驶。
如果前车很慢而导致本车不可能用期望车速来行驶,那么ACC可以使得两车保持驾驶员设定的期望车距。
在需要时,车辆会自动刹车和/或变速,以保持设置的车速或距离。
在某些行驶状况下,还会要求驾驶员主动进行制动,这个警报信息会以声音和视觉方式显示出来。
ACC的使用方法
在介绍ACC原理之前,我们先来熟悉一下操作方法。
首先,打开ACC功能
ACC的所有操作功能都集成在了下图的拨杆上,把拨杆向司机方向拉动,即可开启ACC 功能,把拨杆推回去则可以关闭ACC功能。
其次,设定期望车速
向上或向下推动操纵杆,可以提高或降低期望车速,车速可设置的范围一般为30~200Km/h,默认30Km/h开始,每推动一次,可以增加或减少10Km/h(有些步长是5Km/h),最后按下设置按键,即可保存车速,同时在仪表上也会显示设置的速度值。
补充一下,对于全速ACC,则可以做到0Km/h起步,没有最低速度要求,这也是下文谈到的。
自适应巡航控制

• 3.电位计 • 在电力驱动式执行机构中,一般都装有一只由可变电阻器 构成的电位计(即转角或位移传感器),其功用是检测执 行机构中控制臂转动的角度或拉索的位移量,并将电信号 输入CCS ECU。该信号主要用于CCS ECU诊断执行机构 是否发生故障。在CCS ECU向执行机构发出控制指令后, 如果电位计信号没有变化或超过预先设定值,则将判定执 行机构有故障。 • 4.巡航控制电子控制器(ECU) • 选用CCS ECU时,对它们有一定的特殊要求,如抗电磁 干扰能力,在高温下的工作能力以及必要的运算速度等等。
• • • •
g 节气门位置传感器 用于监测节气门的位置,并将信号传送给巡航控制ECU。 h.执行器(即节气门驱动机构) 用于将巡航控制ECU发来的电信号转变成机械运转,控制 节气门的开度.使汽车按驾驶员设定的车速行驶。
• 行车中,在驾驶员开启巡航控制系统,并按操作程序完成 巡航车速的设定后,车速传感器立即将此速度信号传送给 巡航控制ECU, 并储存在随机存储器(RAM)中。与此同时, 巡航控制ECU向执行器发出信号,以控制节气门开度,使 汽车按设定车速行驶。 • 行车中,巡航控制系统通过车速传感器连续不断地监测 汽车在各个时刻的速度,并将此速度信号传送给巡航控制 ECU,经中央处理器(CPU)将此速度信号和储存在随机存 储器(RAM)中的巡航车速信号进行比较运算和处理后,巡 航控制ECU迅速向执行器发出增大或减小节气门开度的信 号,通过控制节气门驱动电动机的正、反转及转速,从而 实现对汽车行驶速度的控制。
传感器安装位置
• 目前市面上传感器主要包括雷达传感器、红外光束传 感器以及视频摄像头三种。品牌、车型不同其安装位置 也不同,常见的安装位置有车标后、保险杠两侧、下方 以及车内后视镜背后。造成这些差异的原因主要是各种 传感器工作原理不同,当然其中也包的弱点,所以目前自适应巡航 系统开发过程中,研发人员便会根据各种传感器的特点, 将它们组成搭档,共同为数字信号处理器提供信息。比如 雷达对于垂直方向上重叠物体的判断较弱。在实际行车中, 当车辆行驶到立交桥附近时,如果前方与盘桥匝道上同时 出现车辆,雷达传感器有很低几率出现误判;前方路面出 现金属标识牌甚至是金属废弃物时,雷达传感器也有很低 几率产生误判。相信没人想拿自己的生命做赌注,于是为 了进一步降低误判的可能,越来越多的自适应巡航系统采 用两种传感器收集信息。
acc的工作原理

acc的工作原理
ACC(自适应巡航控制系统)是一种车辆辅助系统,通过与
车辆上的传感器和控制单元配合工作,能够在保持安全行车的前提下,自动控制车辆的速度、距离和加减速的功能。
ACC的工作原理主要包括以下几个步骤:
1. 车辆前方探测:ACC通过车辆上的雷达传感器或激光传感
器等设备,实时感知到车辆前方的障碍物或其他车辆的位置和距离。
2. 跟踪目标车辆:ACC根据前方传感器感知到的信息,选择
一辆目标车辆作为自己的导航对象。
ACC会监测目标车辆的
速度、加减速度以及与自己车辆的相对距离。
3. 距离和速度控制:ACC根据与目标车辆的相对距离和速度差,自动调整自己车辆的速度和车与车之间的安全距离。
如果目标车辆减速或停车,ACC会相应地减速或停车以保持安全
距离。
如果目标车辆加速,ACC也会加速以保持与目标车辆
的距离。
4. 制动和加速控制:ACC的控制单元会根据前方障碍物和目
标车辆的信息,决定何时制动或加速。
ACC会通过电子控制
单元控制车辆的制动系统和油门,自动实现减速和加速的操作。
总的来说,ACC通过感知和分析车辆前方的环境和目标车辆
的行驶状态,以及控制车辆的制动和加速系统,实现自动化的速度和距离控制,从而提高行车安全性和驾驶舒适度。
acc的工作原理

acc的工作原理
ACC(自适应巡航控制)是一种车辆辅助驾驶系统,它可以
根据周围车流情况自动调整车辆的速度,以保持与前车的安全距离,并实现一定的自动驾驶功能。
其工作原理可以分为以下几个步骤:
1. 感知:ACC系统通过使用传感器技术(如雷达、摄像头等)来感知前方车辆的位置、速度和距离,以及道路上的障碍物和交通标志等信息。
这些传感器会不断地向控制单元提供实时数据。
2. 决策:控制单元会使用感知到的信息来对车辆的驾驶情况进行评估,并根据预先设定的驾驶策略和安全规则来做出相应的决策。
这些决策会影响车辆的加速、减速和制动等操作。
3. 控制:控制单元会通过控制车辆的发动机、刹车和方向盘等系统来实现对车辆的控制。
根据前方车辆的速度和距离,
ACC系统可以自动调整车辆的速度,以保持与前车的安全距离,并减少司机的驾驶负担。
4. 反馈:ACC系统会向驾驶员提供实时的反馈信息,如显示
当前设置的巡航速度、与前车的距离等。
如果系统检测到驾驶员的反应时间过长或出现危险情况,它还可以通过声音、震动等方式提醒驾驶员采取行动。
总体来说,ACC的工作原理是基于对周围环境的感知和根据
预设的策略做出相应的决策,在此基础上通过控制车辆的各种系统来实现对车辆的自动控制,以提高驾驶的舒适性和安全性。
汽车自适应巡航控制系统研究现状与发展趋势
汽车自适应巡航控制系统研究现状与发展趋势一、本文概述随着汽车工业的快速发展和智能化技术的不断进步,汽车自适应巡航控制系统(Adaptive Cruise Control,简称ACC)已成为现代车辆的重要组成部分。
该系统通过集成传感器、控制器和执行器等设备,实现了对车辆速度、距离和加速度等关键参数的自动调节,从而有效提高了驾驶的安全性和舒适性。
本文旨在全面综述汽车自适应巡航控制系统的研究现状与发展趋势,分析当前技术瓶颈及未来发展方向,为相关领域的研究人员和企业提供参考。
文章首先回顾了汽车自适应巡航控制系统的发展历程,介绍了其基本原理和组成结构。
随后,从传感器技术、控制算法、系统集成等方面,深入探讨了当前研究现状,并指出了存在的技术问题和挑战。
在此基础上,文章进一步展望了汽车自适应巡航控制系统的发展趋势,包括传感器融合、深度学习算法的应用、车路协同技术等方面。
文章总结了汽车自适应巡航控制系统的未来研究方向和应用前景,为推动该领域的技术进步和产业发展提供了有益的思路。
二、汽车自适应巡航控制系统研究现状汽车自适应巡航控制系统(Adaptive Cruise Control, ACC)是近年来汽车智能化发展的重要成果之一,其研究现状呈现出日益成熟和多样化的趋势。
自适应巡航控制系统通过集成雷达、摄像头、传感器等多种设备,实现了对车辆周围环境的实时监测和精准判断,使车辆能够在不同道路条件和交通环境下,自动调节车速和车距,以保持安全、舒适的行车状态。
目前,国内外众多汽车厂商和科研机构都在积极开展自适应巡航控制系统的研究与应用。
在硬件技术方面,高精度雷达和摄像头等传感器的性能不断提升,为自适应巡航控制系统提供了更加准确和丰富的环境信息。
在算法技术方面,人工智能和机器学习等先进技术的应用,使得自适应巡航控制系统能够更好地学习和适应不同的驾驶行为和道路环境,提高了系统的智能化水平和适应性。
随着车联网技术的快速发展,自适应巡航控制系统也开始与智能交通系统、自动驾驶等技术进行融合,形成了更加复杂和智能的综合驾驶辅助系统。
acc自适应巡航原理
acc自适应巡航原理
ACC自适应巡航系统是一种智能驾驶辅助技术,能够在车辆与前方车辆保持安全距离的情况下,自动控制车辆的速度和加减速操作。
该系统通过使用车辆前方的雷达或摄像头等感知装置,实时监测前方车辆的速度和距离,并根据这些信息调整车辆的速度。
ACC系统的原理是基于智能车速控制和车距维持两个关键技术。
首先,智能车速控制技术利用车辆搭载的传感器实时感知前方车辆的速度,然后根据设定的巡航速度和车距要求,自动调节车辆的油门和刹车来控制速度。
这样,无论前方车辆的速度如何变化,ACC系统都能够保持与前车的安全距离。
其次,车距维持技术是ACC系统的另一个核心功能。
该技术通过感知前方车辆的距离,并结合设定的车距要求,自动调整车辆的速度和跟车距离。
当前方车辆的距离过近时,ACC系统会根据设定的车距要求自动减速或刹车,以保持安全距离。
当距离增加时,ACC系统也能够根据设定的巡航速度进行加速操作。
需要注意的是,ACC系统虽然能够自动控制车辆的速度和跟车距离,但驾驶员仍需时刻保持警惕并对道路情况做出及时反应。
在需要变道、绕过障碍物或紧急情况下,驾驶员应当及时对车辆进行控制,以确保行车安全。
总之,ACC自适应巡航系统通过智能车速控制和车距维持技术,实现了智能化的车辆巡航功能。
它能够根据前方车辆的速
度和距离自动调整车辆的速度和跟车距离,提升驾驶安全性和舒适性。
自适应巡航控制系统ACC

施工区域等,使ACC提前做出应对措施。
人工智能和机器学习
自主学习和优化
通过机器学习算法,ACC能够根据驾驶员的 驾驶习惯和习惯进行自主学习和优化,提高 驾驶舒适性和安全性。
预测性控制
利用人工智能技术,ACC能够预测道路上的变化和 障碍物移动轨迹,提前调整车速和距离,提高行驶 稳定性。
人机协同驾驶
通过人工智能技术,ACC能够与驾驶员进行 自然语言交互,辅助驾驶员进行决策和控制 ,提高驾驶安全性。
自适应巡航控制系统acc
目 录
• 引言 • ACC的工作原理 • ACC的应用场景和优势 • ACC的未来发展 • 结论
01 引言
目的和背景
目的
自适应巡航控制系统(ACC)的目 的是提高驾驶安全性,减轻驾驶负 担,并提高道路交通效率。
背景
随着传感器技术和控制理论的不 断发展,ACC系统逐渐成为现代 汽车的重要辅助驾驶系统之一。
未来研究和开发的方向
进一步优化控制算法
随着人工智能和传感器技术的发展,未来自适应巡航控制 系统将更加智能化和自主化,需要进一步优化控制算法以 实现更精确和可靠的控制。
集成其他驾驶辅助系统
未来自适应巡航控制系统将更加集成化,与车道保持、自 动泊车等其他驾驶辅助系统相互协作,共同为驾驶员提供 更加全面和智能的驾驶支持。
横摆力矩控制
根据车辆的运动状态和驾驶员的转向输入,动态控制系统计算出合适的横摆力矩,以控制车辆的横摆运动和转向 动态。
03 ACC的应用场景和优势
高速公路驾驶
高速公路驾驶是自适应巡航控制系统(ACC)最常应用的场景 之一。在高速公路上,ACC能够自动调整车辆速度,保持与前 车的安全距离,减轻驾驶者的负担,提高驾驶安全性。
acc自适应巡航的工作原理

ACC自适应巡航(Adaptive Cruise Control)是一种智能化的自动控制系统,它结合了汽车自动巡航控制系统CCS和车辆前向撞击报警系统FCWS。
其工作原理主要通过以下几个部分共同完成:
1. 雷达传感器:在ACC系统中,测距雷达用于测量自车与前方车辆的车头距离、相对速度和相对加速度。
它是自适应巡航控制系统中的关键设备之一。
2. 电子控制单元(ECU):负责根据内存中的程序和数据对各种传感器输入的信息进行运算、处理和判断,然后输出相应的指令。
3. 巡航控制开关、车速设定器、车距设定器、状态显示器和报警器等:这些设备共同实现对车辆行驶速度、车距和状态的设定和监控。
在车辆行驶过程中,ACC系统通过雷达传感器持续扫描前方道路,同时轮速传感器采集车速信号。
当与前车之间的距离过小时,ACC控制单元会协调制动防抱死系统、发动机控制系统等,使车辆适当制动,并降低发动机输出功率,以保持安全距离。
当与前车距离增加至安全距离时,ACC控制单元会控制车辆按照设定的车速行驶。
ACC自适应巡航主要分为两种情况:前方有车时,系统会根据车主设定的跟车距离进行巡航;前方没有车时,系统会自动根据车主设定的巡航速度匀速前进。
总之,ACC自适应巡航系统通过雷达传感器、电子控制单元等部分,实现对车辆行驶速度、距离和状态的智能控制,确保车辆在行驶过程中的安全。
汽车acc和b+的工作原理

汽车acc和b+的工作原理
汽车的ACC和B+是两个独立的系统,分别用于辅助驾驶和电气系统管理。
下面分别介绍它们的工作原理:
1. 自适应巡航控制系统 (ACC):
ACC是一种自动驾驶辅助系统,可以帮助驾驶员在高速公
路上保持安全距离,并在交通条件允许的情况下控制车辆的速度。
它通过以下步骤工作:
- 雷达或激光传感器测量前方车辆的距离和速度。
- 系统根据设定的跟随距离和车速来计算必要的制动或加速度。
- 系统向车辆的加速和制动系统发送命令,控制车辆的速度。
- 如果前方车辆突然减速或停车,ACC会自动减速或停车,
以保持安全距离。
2. B+系统:
B+系统是车辆的电气系统管理系统,其工作原理如下:
- 在汽车的电气系统中,B+是一个高电压导线,用于为整个
车辆的电气设备提供正极电源。
- 当点火开关打开时,电流从车辆电池通过B+导线流向各个
电气设备,如灯光、音响、导航系统等。
- B+系统通常还包括一个主保险丝,用于保护整个车辆电气
系统免受过载或短路等电气故障的损害。
- B+系统还可以通过车辆的故障诊断系统来检测和报告电路
中的故障,从而帮助修理技术员确定问题所在并进行维修。
- 在一些混合动力或电动汽车中,B+系统还可以与高压电池
系统连接,用于提供电动动力和充电。
综上所述,汽车的ACC和B+系统分别用于辅助驾驶和电气系统管理,通过不同的工作原理来提供相关的功能和服务。
自适应巡航系统的工作原理

自适应巡航系统的工作原理自适应巡航系统(Adaptive Cruise Control,ACC)是一种基于雷达或激光传感器的智能驾驶辅助系统,能够实现自动控制车辆的速度和与前车的距离,以保持安全的巡航状态。
它通过实时感知前方车辆的位置和速度,并根据预设的跟车策略自动调整巡航速度,从而实现自动跟车和自动减速的功能。
自适应巡航系统的工作原理可以简单概括为以下几个步骤:1.感知前方车辆:自适应巡航系统通过雷达或激光传感器对前方车辆进行感知。
这些传感器能够实时获取前方车辆的位置、速度和加速度等信息,并将其传输给控制系统。
2.分析车辆数据:控制系统接收到传感器传输的前方车辆数据后,会对数据进行分析和处理。
它会计算与前车的相对速度和距离,并根据预设的跟车策略来判断是否需要调整巡航速度。
3.调整巡航速度:如果控制系统判断需要调整巡航速度,它会通过控制车辆的加速踏板或制动系统来实现速度的调整。
当与前车的距离过近时,系统会减小车辆的速度;当与前车的距离适中或过大时,系统会适度增加车辆的速度,以保持与前车的安全距离。
4.监测周围环境:自适应巡航系统不仅能够感知前方车辆,还能够监测周围的环境。
它可以检测并识别交通标志、道路标线和障碍物等,从而更好地适应不同的道路情况和交通环境。
5.人机交互:自适应巡航系统通常会与车辆的信息显示系统或导航系统进行连接,以实现人机交互。
驾驶员可以通过仪表盘或中控屏幕来设置巡航速度和跟车间距等参数,并随时监控系统的工作状态。
自适应巡航系统的工作原理基于车辆感知和控制技术,通过精确的传感器和智能控制算法,能够实现对前方车辆的自动跟车和速度调整。
它可以大大减轻驾驶员的驾驶负担,提高行驶的舒适性和安全性。
然而,驾驶员在使用自适应巡航系统时仍需保持警惕,随时准备接管车辆的控制,以应对突发情况或系统故障。
此外,自适应巡航系统的性能和可靠性也需要不断的改进和完善,以满足不同驾驶场景和条件下的需求。
自适应巡航系统是一项基于感知和控制技术的智能驾驶辅助系统,能够实现自动控制车辆的巡航速度和跟车距离。
acc操作手册
acc操作手册
ACC(自适应巡航控制)操作手册如下:
1. 按下方向盘上的“Set键”(即①键),激活ACC。
激活时车速低于
30km/h时,将设置30km/h为初始巡航车速;车速高于30km/h时,将设置当前车速为初始巡航车速。
2. 沿方向盘上的“靠近驾驶员侧”方向拨动手柄(即②键),可以恢复当前保存的车速或激活ACC功能。
3. 沿方向盘上的“远离驾驶员侧”方向拨动手柄(即③键),可以退出ACC激活状态,进入待机状态。
4. 在ACC激活状态下,沿方向盘上的“减少设置车速”方向拨动手柄(即
④键),可以设置减少车速。
5. 在ACC激活状态下,沿方向盘上的“增大设置车速”方向拨动手柄(即
⑤键),可以设置增大车速。
6. 通过旋转巡航手柄末端位置自锁式按键(即⑥键),可以实现四个档位车间时距的调节。
以上操作均需在交通状况较为简单的封闭型道路(如高速、城市快速路)上尝试使用,以掌握ACC的性能及操作方式。
为了您和他人的安全,请遵守交通规则,谨慎驾驶。
自适应巡航定速控制系统(ACC)
3
自适应巡航定速控制系统 (ACC)
ACC 网络拓扑:
EPB PDK CSCM
底盘系统 CAN 传动系统 CAN 舒适系统 CAN
网关
碰撞风险系统 CAN
ACC
PSM
底盘系统 CAN
DME
传动系统 CAN
安全气囊
驾驶员 侧车门
传动系统 CAN 舒适系统 CAN
组合仪表
MMI 系统 CAN
Ralf Pfänder 服务培训
2
自适应巡航定速控制系统 (ACC)
• ACC 属于选装配置,仅随 Porsche Doppelkupplung (PDK) 保时捷 双离合器变速箱一起提供
• ACC 以标准的巡航定速控制功能为基础 (巡航定速控制 = 保持恒定的车速)
• ACC 通过启动制动器和发动机来控制车速和距离
• ACC 控制单元通过碰撞风险系统 CAN 连接到网关,并通过以下 系统进行通信:传动系统 CAN、底盘系统 CAN、舒适系统 CAN 和 MMI 系统 CAN
Ralf Pfänder 服务培训
Panamera
创建日期:26.03.2009 第 3 页,共 16 页
学员信息:
请参见《驾驶手册》(pp. 170ff.),了解有关自适应巡航定速控制系统 (ACC) 的信息。
_____________________________________________________________________________________________ _____________________________________________________________________________________________ _____________________________________________________________________________________________ _____________________________________________________________________________________________ _____________________________________________________________________________________________ _____________________________________________________________________________________________ _____________________________________________________________________________________________
适应式巡航控制(ACC)操作指南说明书
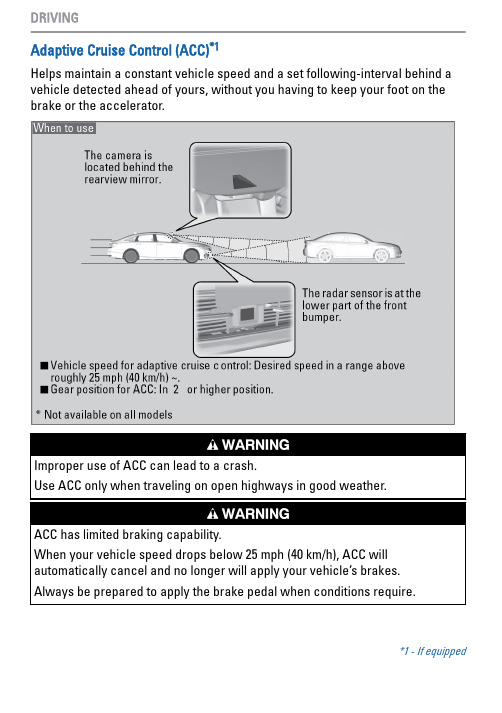
Adaptive Cruise Control (ACC)*1Helps maintain a constant vehicle speed and a set following-interval behind a vehicle detected ahead of yours, without you having to keep your foot on the brake or the accelerator.Improper use of ACC can lead to a crash.Use ACC only when traveling on open highways in good weather.ACC has limited braking capability.When your vehicle speed drops below 25 mph (40 km/h), ACC will automatically cancel and no longer will apply your vehicle’s brakes.*1 - If equippedn Activating and Setting the Vehicle Speed1.Press the MAIN button. The ACC(green) indicator appears.2.Take your foot off the pedal andpress down the SET/– button whenyou reach the desired speed. Themoment you release the button, theset speed is fixed, and ACC begins.Note: When you completely disableVSA®, you cannot use ACC.n Adjusting the Vehicle SpeedIncrease or decrease the vehicle speed using the RES/+ or SET/– button on the steering wheel.1.Each time you press the RES/+ or–/SET button, the vehicle speed isincreased or decreased by about 1mph or 1 km/h accordingly.2.If you keep pressing the RES/+ or–/SET button, the vehicle speedincreases or decreases by about 5mph or 5 km/h accordingly.n Adjusting the Vehicle DistancePress the Interval button to change theACC following-interval. Each time youpress the button, the following-intervalsetting cycles through extra long, long,middle, and short following-intervals.n During OperationACC monitors if a vehicle ahead of youenters the ACC range. If a vehicle isdetected doing so, the ACC systemmaintains or decelerates your vehicle’sset speed in order to keep the vehicle’sset following-interval from the vehicleahead.When a vehicle whose speed is slowerthan your set speed is detected in frontof you, your vehicle starts to slowdown.If a vehicle detected ahead of you slows down abruptly or if another vehicle cuts in front of you, the beeper sounds and a message appears on the driver information interface.n Canceling ACCTo cancel ACC, do any of the following:•Press the CANCEL button.•Press the MAIN button.The ACC indicator (green) goes off.•Depress the brake pedal.•Depress the clutch pedal*1 for fiveseconds or more.Note: When you completely disableVSA® while ACC is activated, ACC willautomatically be canceled.*1 - If equippedn Switching to Standard Cruise ControlPress and hold the Interval button forone second.Cruise Mode Selected appears in thedriver information interface for twoseconds, and then the mode switchesto Cruise.To switch back to ACC, press and holdthe interval button again for onesecond.n Important Safety ReminderAs with any system, there are limits to ACC. Use the brake pedal whenever necessary, and always keep a safe interval between your vehicle and other vehicles.LimitationsYou may need to use the brake to maintain a safe interval when using ACC.Additionally, ACC may not work properly under certain conditions.Adaptive Cruise Control (ACC) with Low Speed Follow*1Helps maintain a constant vehicle speed and a set following interval behind a vehicle detected ahead of yours and, if the detected vehicle comes to a stop, can decelerate and stop your vehicle, without you having to keep your foot on the brake or the accelerator. When ACC with Low Speed Follow slows your vehicle by applying the brakes, your vehicle's brake lights will illuminate.n Activating and Setting the Vehicle Speed1.Press the MAIN button. The ACC(green) indicator appears.*1 - If equipped2.Accelerate to the desired speed.When driving at about 25 mph (40km/h) or above: Take your foot offthe pedal and press the SET/–button when you reach the desiredspeed. The moment you release thebutton, the set speed is fixed, andACC with Low Speed Follow begins.When driving slower than about 25mph (40 km/h): If the vehicle ismoving and the brake pedal is notdepressed, pressing the button fixesthe set speed to about 25 mph (40 km/h) regardless of current vehicle speed. If the vehicle is stationary, you can set the vehicle speed even with the brake pedal depressed.n Adjusting the Vehicle SpeedPress the RES button to increase speed or the SET button to decrease speed.Each time you press the switch up ordown, the vehicle speed is increased ordecreased by about 1 mph (1 km/h). Ifyou keep the switch pressed up ordown, the vehicle speed increases ordecreases by 5 mph or 5 km/h until yourelease it.n Adjusting the Vehicle DistancePress the Interval button to change theACC with Low Speed Follow following-interval. Each time you press thebutton, the following-interval settingcycles through extra long, long, middle,and short following-intervals.n During OperationACC with Low Speed Follow monitors ifa vehicle ahead of you enters the ACCwith Low Speed Follow range. If avehicle is detected doing so, the ACCwith Low Speed Follow systemmaintains or decelerates your vehicle’sset speed in order to keep the vehicle’sset following-interval from the vehicleahead. When a vehicle whose speed isslower than your set speed is detectedin front of you, your vehicle starts to slow down.You can temporarily increase the vehicle speed when you press theaccelerator pedal. ACC stays on unless you cancel it. When you release the accelerator pedal, the system resumes the set speed or a sufficient speed to maintain the following interval.If a vehicle detected ahead of you slows down abruptly or if another vehicle cuts in front of you, the beeper sounds and BRAKE appears on the driver information interface, and the head-up warning lights*1flash.You may need to use the brake to maintain a safe interval when using ACC with Low Speed Follow.Additionally, ACC with Low Speed Follow may not work properly undercertain conditions.n Canceling ACC with Low Speed FollowTo cancel ACC with Low Speed Follow, do any of the following:•Press the CANCEL button.•Press the MAIN button.The ACC with Low Speed Follow indicator (green) goes off.•Depress the brake pedal.When the Low Speed Follow function has stopped the vehicle, you cannot cancel ACC with Low Speed Follow by depressing the brake pedal.*1 - If equippedAfter you have canceled ACC with LowSpeed Follow, you can resume the priorset speed while it is still displayed.Press the RES/+ button. The set speedcannot be set or resumed when ACCwith Low Speed Follow has been turnedoff using the MAIN button. Press theMAIN button to activate the system,then set the desired speed.Exiting a vehicle that has been stopped while the ACC with Low Speed Follow system is operating can result in the vehicle moving withoutImproper use of ACC with Low Speed Follow can lead to a crash.Use ACC only when driving on expressways or freeways and in goodACC with Low Speed Follow has limited braking capability and may not stop your vehicle in time to avoid a collision with a vehicle that quicklyn Switching to Standard Cruise ControlPress and hold the Interval button for one second.Cruise Mode Selected appears on theDriver Information Interface for twoseconds, and then the mode switchesto Cruise.To switch back to ACC with Low SpeedFollow, press and hold the intervalbutton again for one second.Always be aware which mode you are in. When you are driving in Cruise mode, the system will not assist you to maintain a following interval from a vehicle ahead of you.n Important Safety ReminderAs with any system, there are limits to ACC with Low Speed Follow. Use the brake pedal whenever necessary, and always keep a safe interval between your vehicle and other vehicles.LimitationsYou may need to use the brake to maintain a safe interval when using ACC with Low Speed Follow. Additionally, ACC with Low Speed Follow may not work properly under certain conditions.。
acc控制方法
ACC(Adaptive Cruise Control,自适应巡航控制)是一种汽车驾驶辅助系统,用于帮助驾驶员保持安全的车距和速度控制。
ACC通过使用雷达、激光、摄像头等传感器来检测前方车辆,并根据其动态调整车辆的速度和距离。
ACC控制方法的主要原理是根据前方车辆的距离和速度,自动调整车辆的加速度和减速度,以保持设定的安全距离。
以下是ACC控制方法的关键步骤:
1.目标检测:通过传感器检测前方车辆的位置、速度和加速度。
常用的传感器包括雷达、激光和摄像头等。
2.数据处理:对传感器获取的数据进行处理和分析,提取出前方车辆的位置、速度和加速度等关键信息。
3.距离和速度控制:根据设定的安全距离和速度,计算出车辆应该保持的理想速度和加速度。
如果前方车辆距离减小,ACC系统会自动减速以保持安全距离;如果前方车辆距离增加,则ACC系统会相应加速以维持安全距离。
4.动力系统控制:ACC系统通过与车辆的动力系统(如发动机和制动系统)进行通信,控制车辆的加速和减速。
5.状态监测和警示:ACC系统会不断监测前方车辆和车辆的状态,并在需要时发出警示,例如当距离过近或与前方车辆发生碰撞风险时。
需要注意的是,尽管ACC系统可以提供一定的驾驶辅助功能,但驾驶员一直需要保持警惕并全面掌握车辆的控制。
此外,ACC系统通常只适用于高速公路等特定环境下,具体使用方法和操作流程可能因车型和制造商而有所不同。
在使用ACC系统时,应遵守道路交通规则并根据实际情况调整和控制车速。
acc系统原理
acc系统原理
acc系统(Adaptive Cruise Control,即自适应巡航控制系统)是一种汽车驾驶辅助系统,它利用雷达或激光传感器来感知前方车辆的距离和相对速度,并根据这些信息控制车辆的油门和刹车,以保持与前车的安全距离和速度一致。
ACC系统的工作原理可以简单描述为以下几个步骤:
1. 感知和检测:ACC系统通过前方的雷达或激光传感器,实时感知前车的存在并检测前车与自己的距离和速度差。
2. 规划和控制:根据检测到的前车信息,ACC系统会计算出与前车的安全距离,并与设置的期望速度进行比较。
如果与前车的距离小于设定的安全距离,系统将发送指令给车辆的油门和刹车系统,自动调整车速,以保持安全距离。
3. 反馈和调整:ACC系统不断地更新和监测前车的距离和速度信息,根据实际情况调整车辆的加速和减速,以保持与前车的安全距离和速度一致。
4. 可控性和可撤销性:驾驶员可以随时通过踩下油门或刹车踏板来覆盖或取消ACC系统的控制,以保持对车辆的最终控制权。
需要注意的是,ACC系统并不是一种完全自动驾驶系统,它只是一种驾驶辅助系统,在驾驶员的监控下工作。
驾驶员仍然需要保持警惕并随时准备接管车辆的控制,以应对突发状况或
其他异常情况。
此外,ACC系统的性能还取决于天气条件、前方车辆的反射性能、传感器的准确度等因素。
因此,驾驶员在使用ACC系统时应综合考虑各种因素,保持安全驾驶。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
激光雷达是一种光子 雷达系统,它具有测 量时间短、量程大、 精度高等优点,在许 多领域得到了广泛应 用。激光雷达根据激 光束传播时间确定距 离。但当激光镜头被 泥、雪等物质盖住后, 或在强光干涉情况下, 激光雷达工作将受到
影响。
• ACC 系统对雷达的基本要求为:外形体积(特别是天线) 较小,适于在汽车上安装;测距范围大于100m;测量精度 小于1m;接近速度在100km/h 以上;应能利用汽车的电源, 消耗功率较小。当前世界主要生产测距雷达的厂家及雷达 参数如表所示。
1.测距传感器(雷达)
在ACC 系统中,测距雷达用于测量自车与前方车辆的车头距、相对速度、相对 加速度,是自适应巡航控制系统中关键设备之一,也是决定该系统造价的主要 元件。它造价的高低直接影响该项技术的推广应用,因而在该项技术中பைடு நூலகம்有重 要地位。它包括发射天线、接受天线和DSP(数字信号处理)处理单元、数据 线总成几部分。当前,测距雷达的研究主要集中在毫米波雷达和激光雷达上。
在上图所示的交通情况下,尽管行驶车辆的行车道前方无 车,但是ACC 可能会对右侧行车道上行驶的车作出反应 (左图)。车道探测的精确度受到车速的影响,车速越高, 需要的车距越大,行车道预报的精确度越低。特别是在左
转弯时。对ACC 来说,转弯半径要大于500 m。
(三)ACC系统操作过程
“ACC OFF”代 表“ACC 功能关
。
在前方有慢车 插入时(见左 图),ACC 通 过减速作出反 应,使本车速 度与前车速度
相当。
加速行为取决于当前车速或者当前挡位, 在某些车型上,可以在辅助菜单上进行
基本设定。
若前方车辆加速或 者变换行车道,前 方无车(见右图), 那么ACC 会使本车 重新加速,恢复到
预设车速。
在紧邻车旁刚 刚插入或者不 在同一条直线 上行驶的道路 使用者(如摩 托车,右图), 由于不在ACC 的视野范围内, 系统不能对其 作出反应。
闭”
“CANCEL”代表 “待命模式”, 同时在存储器中 保存期望车速值。
毫米波雷达是利用目标对电磁波反射来发现目标并测定其位置的。 毫米波频率高、波长短,一方面可缩小从天线辐射的电磁波射束角幅 度,从而减少由于不需要的反射所引起的误动作和干扰,另一方面由 于多普勒频移大,相对速度的测量精度高。在汽车上应用毫米波雷达 测距,有以下特点:①探测性能稳定。它不易受对象表面形状和颜色 的影响,也不受大气流的影响。②环境适应性能好。雨、雪、雾等对 之干扰小。作为车载雷达,目前适用的主要有脉冲多普勒雷达、双频 CW 雷达和FM 雷达三种。应用雷达测距,需要防止电磁波干扰,雷达 彼此之间的电磁波和其他通信设施的电磁波对其测距性能都有影响
文字提示,要求驾驶员介入,实施制动。总之,驾驶员需要对过程负责。
如果装备ACC 的车辆行驶速度达到30km/h 以上时,ACC 开始介入工作状 态。在当前车速(见左图),如果传感器检测范围内没有车辆,则保持设
定车速行驶。如果车辆前方遇到一辆慢车行驶在同一条车道上(见右 图),则发动机降低扭矩,如果有必要,车辆采取柔和的制动措施,以此 将两车车距调节到驾驶员预设的值,该值为受时间控制的值。制动介入是 通过ABS 液压泵的方式,出于计算的原因,只能选择同方向行驶的为参考
ACC 系统的组成 测距传感器(雷达) ECU 作动器
功能
• 测距传感器即雷达,用于测量自车与前车的相对距离、相 对速度、相对加速度;
• 中央控制单元ECU 进行控制计算,负责计算设定速度、实 现车头净距控制的加速度,并发出控制指令,控制汽车速 度和加速度的执行机构;
• 作动器包括节气门作动器和制动作动器,用于调节汽车的 加速度,以满足控制的要求。
ACC自适应巡航系统
ACC系统的组成及工作原理
工作原理:
当自车通过雷达探测到前方没有汽车等其它障碍物时,汽 车执行传统巡航控制,按驾驶员设定的速度行驶;当雷达 探测到前方有汽车切入或减速行驶时,启动ACC 控制系统 ,按照驾驶员设定的车间时距,通过调节节气门作动器和 制动作动器来控制自车的速度和加速度,以保证计算的车 头净距。
雷达传感器用来决定与前车的距离和相对车速,如果距离大于设定的距离,车 辆加速到驾驶员设定车速。如果距离小于设定距离,ACC 系统会自动减小发动 机的扭矩,并在必要时采取必要的制动,以此将两车车距调节到驾驶员预设的 值,该值为受时间控制的值。出于安全性考虑,制动减速度被限定在0.3g (大 约3m/s2)。如果这样的减速度不能制动停车,则系统通过仪表发出声音以及
作动器是ACC 系统的执行机构。作动器包括节气门作动器和制动作动器。 控制器ECU计算出汽车的加速度,再将控制命令传递到作动器,控制节气 门作动器和制动作动器的动作,实现汽车的加速或减速。对节气门的控 制根据发动机的图谱反算节气门的开度,再通过机械的方式来控制节气 门的开度,从而控制发动机的输出转矩。对制动的控制可通过增加由PWM 电磁控制的电子真空助力器来实现。电子真空助力器与制动的真空助力 器相连,其结构[4]示意图如图3 所示。控制器通过电磁铁控制电子真空 助力器的气压输入,从而控制真空助力器的压力,实现制动装置的制动。
• 控制器ECU
是ACC 系统的中央处理器 ,是系统的核心部分。它 负责将传感器送来的数据 (包括相对距离、相对速 度)进行处理,然后按照 控制算法进行计算,最后 形成指令控制作动器工作 。它主要包含目标车头距 计算,决定自车与前车的 距离;车头距控制器,它 计算获得目标车头距的车 速、加速度命令;车速控 制器,它决定制动作动器 和节气门作动器的工作。 它的结构框图如图所示。
(二)ACC系统功能介绍
ACC 传感器装备在车头大众的徽标下,没有装载传感器的车型徽标是镂 空的。ACC 是普通巡航控制功能的扩展,ACC 的基本功能是控制车辆, 使其与同方向上的前车保持在驾驶员设定的距离。在高速公路上开启ACC 自适应巡航,设定好跟车距离,系统就可以包办驾车工作了。位于车头 VW 徽标后的雷达随时监视前车的速度,自动控制制动,保持合适的车速。