《遥感原理与应用》实验报告——影像分类
遥感分类实习报告
Erdas遥感分类实习报告一.分类区背景:分类区的范围大致和北京四环以内的中心市区吻合,地形为平原,多高楼大厦等建筑,气候为典型的暖温带半湿润大陆性季风气候,夏季高温多雨,冬季寒冷干燥,春、秋短促。
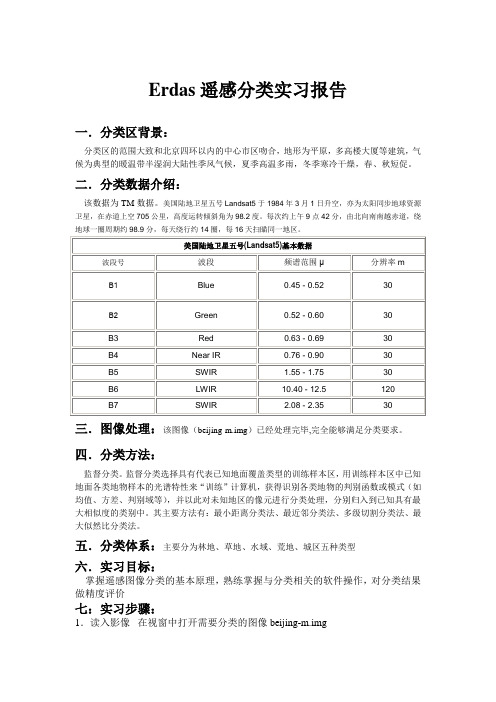
二.分类数据介绍:该数据为TM数据。
美国陆地卫星五号Landsat5于1984年3月1日升空,亦为太阳同步地球资源卫星,在赤道上空705公里,高度运转倾斜角为98.2度。
每次约上午9点42分,由北向南南越赤道,绕地球一圈周期约98.9分,每天绕行约14圈,每16天扫瞄同一地区。
三.图像处理:该图像(beijing-m.img)已经处理完毕,完全能够满足分类要求。
四.分类方法:监督分类。
监督分类选择具有代表已知地面覆盖类型的训练样本区,用训练样本区中已知地面各类地物样本的光谱特性来“训练”计算机,获得识别各类地物的判别函数或模式(如均值、方差、判别域等),并以此对未知地区的像元进行分类处理,分别归入到已知具有最大相似度的类别中。
其主要方法有:最小距离分类法、最近邻分类法、多级切割分类法、最大似然比分类法。
五.分类体系:主要分为林地、草地、水域、荒地、城区五种类型六.实习目标:掌握遥感图像分类的基本原理,熟练掌握与分类相关的软件操作,对分类结果做精度评价七:实习步骤:1.读入影像在视窗中打开需要分类的图像beijing-m.img2.单击Classifier→Classification→Signature Editor命令,打开Signature Editor 启动样区编辑器3.将新建的signature文件和要分类的遥感图建立起来联系。
4.选择训练区使用Raster下面的tools的的多边形和自动扩张魔棒选择。
使用魔棒说明原来魔棒工具使用不好,要么扩张的范围太大或太小,要么扩张成规则图形不符合要求,因此我对该魔棒工具进行反复试验,终于弄明白了各个参数的意义。
Area:设定的是魔棒工具最大扩张的区域的面积,如图最大扩张的面积为1000个栅格所占的面积。
遥感图像的分类实验报告
一、实验名称遥感图像的监督分类与非监督分类二、实验目的理解遥感图像监督分类及非监督分类的原理;掌握用ENVI对影像进行监督分类和非监督分类的方法,初步掌握图像分类后的相关操作;了解整个实验的过程以及实验过程中要注意的事项。
三、实验原理监督分类:又称训练分类法,用被确认类别的样本像元去识别其他未知类别像元的过程。
它是在分类之前通过目视判读和野外调查,对遥感图像上某些样区中影像地物的类别属性有了先验知识,对每一种类别选取一定数量的训练样本,计算机计算每种训练样区的统计或其他信息,同时用这些种子类别对判决函数进行训练,使其符合于对各种子类别分类的要求,随后用训练好的判决函数去对其他待分数据进行分类。
非监督分类:也称为聚类分析或点群分类。
在多光谱图像中搜寻、定义其自然相似光谱集群的过程。
它不必对影像地物获取先验知识,仅依靠影像上不同类地物光谱(或纹理) 信息进行特征提取,再统计特征的差别来达到分类的目的,最后对已分出的各个类别的实际属性进行确认。
目前比较常见也较为成熟的是ISODATA、K-Mean和链状方法等。
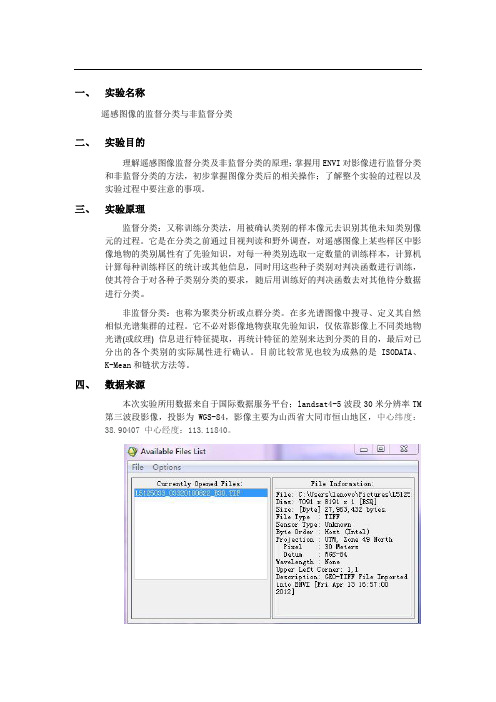
四、数据来源本次实验所用数据来自于国际数据服务平台;landsat4-5波段30米分辨率TM 第三波段影像,投影为WGS-84,影像主要为山西省大同市恒山地区,中心纬度:38.90407 中心经度:113.11840。
鉴于实验内容及图像大小等问题,故从一景TM影像中裁取一个含有较丰富地物信息区域作为待分类影像。
五、实验过程1.监督分类1.1打开并显示影像文件,选择合适的波段组合加载影像打开并显示TM影像文件,从ENVI 主菜单中,选择File →Open Image File选择影像,为了更好地区分不同地物以及方便训练样本的选取,选择5、4、3波段进行相关操作,点击Load Band 在主窗口加载影像。
1.2使用感兴趣区(ROI)工具来选择训练样区1)主影像窗口菜单栏中,选择 Overlay >Region of Interest。
《遥感原理与应用》实验报告一

《遥感原理与应用》实验报告一前言一、实验目的与任务《遥感原理与应用》是测量学科的基础课,也是一门实践性很强的课程,实验的目的一方面是为了验证、巩固课堂上所学的知识,另一方面是熟悉遥感平台的应用方法,培养学生进行遥感平台的基本操作技能,使学到的理论与实践相结合。
通过实验,培养学生的动手能力和严格的科学态度,以及爱护仪器、热爱劳动、热爱集体的良好思想。
二、实验内容与学时分配三、实验注意事项1.在实验之前,必须复习教材中的有关内容,认真仔细地预习实验,明确目的要求、方法步骤及注意事项,以保证按时完成实验。
2.每人必须认真、仔细地操作,培养独立工作能力和严谨的科学态度,同时要发扬互相协作精神。
3.实验应在规定的时间和地点进行,不得无故缺席或迟到早退,不得擅自改变地点或离开现场。
在实验或实习过程中或结束时,发现有损坏情况,应立即报告指导教师,同时要查明原因,根据情节轻重,给予适当处理。
四、实验成绩考核单个实验成绩由两部分组成:课程成绩 = 过程考核30% + 实验报告×70%。
实验一认识遥感影像并熟悉遥感影像处理软件一、实验目的1.掌握遥感影像的下载方式,了解相关平台。
2.掌握ENVI的基本视窗操作,能够进行系统设置,查看并理解遥感卫星影像的相关参数。
3.掌握使用ENVI进行遥感影像裁剪的方法和步骤。
4.了解遥感影像的格式,能够将遥感影像存储成特定格式。
5.掌握遥感影像的合成方法,包括真彩色合成和伪彩色合成。
二、实验原理1.图像裁剪图像裁剪的目的是将研究区之外的区域去除,常用的方法是按照行政区边界或者自然区划边界进行图像裁剪。
同时,还可以按照矩形,任意多边形,影像对其进行裁剪。
规则裁剪,是指裁剪图像的边界范围是一个矩形,这个矩形范围获取途径包括:行列号、左上角和右下角两点坐标、图像文件、ROI/矢量文件。
2.多波段组合以Landsat8 OLI传感器为例,多波段组合方式及用途如下表所示。
表1.1 Landsat8数据波段参数三、实验内容1.通过网络(如地理空间云等),免费下载一幅遥感影像。
遥感影像实习报告
实习报告:遥感影像处理与应用一、实习目的本次遥感影像实习旨在通过理论学习和实际操作,使学生掌握遥感影像的基本处理方法,提高对遥感影像的解译和分析能力,并为实际应用遥感影像提供技术支持。
实习内容包括遥感影像的预处理、裁剪、解译、分类和专题图制作等。
二、实习内容(一)遥感影像预处理1. 辐射校正:在ENVI软件中,对下载的原始遥感影像进行传感器校正、大气校正、太阳高度及地形校正等辐射校正处理,使遥感影像的辐射特性更加真实反映地物实际情况。
2. 几何校正:根据实习所用的遥感影像坐标系,选取相应的控制点,利用ENVI软件进行几何校正,纠正图像坐标系变形,提高遥感影像的地理精度。
(二)遥感影像裁剪利用ENVI软件的感兴趣区域(ROI)功能,选取实习区域范围,将预处理后的遥感影像进行裁剪,去除无关区域,提高后续处理和分析的效率。
(三)遥感影像解译根据《土地利用现状分类-GB2007》标准,对实习区域内的遥感影像地物进行初步目视解译,划分地物类别,为后续分类和专题图制作奠定基础。
(四)遥感影像分类1. 选择合适的光谱特征和纹理特征,利用ENVI软件的面向对象分类模块,对实习区域内的遥感影像进行分类。
2. 针对不同地物类别,设置规则集参数,进行分类处理,得到实习区域的土地利用类型分布。
(五)遥感影像专题图制作根据分类结果,利用ENVI软件将不同土地利用类型赋予不同的颜色,制作土地利用现状分类专题图,直观展示实习区域的土地利用状况。
三、实习成果与分析通过本次实习,我们成功完成了遥感影像的预处理、裁剪、解译、分类和专题图制作等任务。
分类结果较为准确地反映了实习区域的土地利用现状,为后续遥感影像在土地资源调查、环境监测等领域的应用提供了数据支持。
实习过程中,我们学会了使用ENVI软件进行遥感影像处理,掌握了面向对象分类方法,提高了对遥感影像的分析和解译能力。
同时,我们也认识到遥感影像处理和分析在实际应用中需要注意的问题,如数据质量、分类精度等。
遥感影像数据实习报告

一、实习背景随着遥感技术的不断发展,遥感影像数据在资源调查、环境监测、城市规划等领域发挥着越来越重要的作用。
为了使同学们更好地掌握遥感影像数据处理方法,提高实际操作能力,本次实习课程以遥感影像数据为研究对象,通过实践操作,使学生了解遥感影像数据的处理流程,掌握遥感影像处理软件的使用方法。
二、实习目的1. 熟悉遥感影像数据的处理流程;2. 掌握遥感影像处理软件(如ENVI、ArcGIS等)的使用方法;3. 学会遥感影像数据的预处理、增强、分类等基本操作;4. 培养学生独立解决问题的能力,提高实际操作水平。
三、实习内容1. 遥感影像数据预处理遥感影像数据预处理是遥感影像处理的基础,主要包括辐射校正、几何校正、大气校正等。
(1)辐射校正:通过对遥感影像进行辐射校正,消除传感器噪声、大气辐射等因素对影像的影响,提高影像质量。
(2)几何校正:通过对遥感影像进行几何校正,消除由于传感器倾斜、地球曲率等因素引起的几何畸变,使影像与实际地理坐标相对应。
(3)大气校正:通过对遥感影像进行大气校正,消除大气对遥感影像的影响,提高影像的清晰度。
2. 遥感影像数据增强遥感影像数据增强是提高遥感影像质量的重要手段,主要包括对比度增强、锐化、滤波等。
(1)对比度增强:通过对遥感影像进行对比度增强,使影像中地物特征更加明显,便于后续处理。
(2)锐化:通过对遥感影像进行锐化处理,使影像中的地物边缘更加清晰,提高影像的视觉效果。
(3)滤波:通过对遥感影像进行滤波处理,消除影像中的噪声,提高影像质量。
3. 遥感影像数据分类遥感影像数据分类是将遥感影像中的地物进行分类,提取所需信息的过程。
常用的分类方法有监督分类、非监督分类等。
(1)监督分类:根据已知的地物特征,建立分类模型,对遥感影像进行分类。
(2)非监督分类:根据遥感影像自身特征,自动将遥感影像进行分类。
四、实习步骤1. 收集遥感影像数据:从遥感影像数据库中下载或获取所需的遥感影像数据。
遥感实习报告(报告)
重庆交通大学测绘工程《遥感原理及应用》实验报告班级:学号:姓名:指导老师:实验室:地理信息中心实验室实验一ENVI 视窗的基本操作一、实验的目的初步了解目前主流的遥感图象处理软件 ENVI 的主要功能模块,在此基础上,掌握视窗操作模块的功能和操作技能,为遥感图像的几何校正等后续实习奠定基础。
二、实验软件与数据软件:Envi遥感图像处理软件。
数据:重庆地区UTM第八波段数据。
三、实验方法与步骤Envi软件的主菜单:这个是ENVI软件的主菜单,其中包括了文件的载入,基本工具栏,以及图像处理的一些必要的功能。
四、实验体会与建议本次实验主要是熟悉Envi软件的菜单,以及一些常用的方法。
还有就是将Envi软件菜单的界面转换成中文菜单。
1、在ENVI安装目录..\RSI\IDL60\products\envi40\menu下建立新文件夹,命名为orgmenu2、拷贝。
.\RSI\IDL60\products\envi40\menu下原有的英文菜单文件display.men、display_shortcut.men和envi。
men到新建的orgmenu目录中进行备份3、拷贝下载的display。
men、display_shortcut.men和envi。
men文件到..\RSI\IDL60\products\envi40\menu中,覆盖原文件。
4、启动ENVI4.0。
实验二遥感图像的几何校正一、实验的目的通过实习操作,掌握遥感图像几何校正的基本方法和步骤,深刻理解遥感图像几何校正的意义。
二、实验软件与数据软件:Envi遥感图像处理软件。
数据:重庆地区UTM第八波段数据以及未经校核的重庆地区jpg图片。
三、实验方法与步骤1、打开ENVI软件将UTM图像和jpg格式的图片载入,上述图像中我们可以看出,12840-8图像下面有图像的地理信息,而重庆城区图片是没有信息说明的.2、选择校正与镶嵌菜单下的校正图像选取控制点(图像到图像),分别选取基础图像和校正图像,分别在图像上面选择控制点,通过Add Point按钮增加选择的控制点,用这个方法选择5个控制点,单击Show List按钮查看所选控制点的信息3、在控制点选择窗口中选择options菜单,再选择warp file,选择输出校正后的图像文件。
遥感原理与应用实验报告
遥感原理与应⽤实验报告《遥感原理与应⽤》课程Remote Sensing Principle and Application实验报告适⽤专业:遥感科学与技术、测绘⼯程、地理信息系统学期:2016-2017(1)专业班级:测绘⼯程13-4班学⽣姓名:盼学号: 20137018指导教师:⽥静⿊龙江⼯程学院·测绘⼯程学院2016年10⽉⽬录实验⼀ENVI软件安装与基本功能操作 (2)实验⼆影像的地理坐标定位和校正 (18)实验三图像融合、镶嵌、裁减 (28)实验四遥感图像分类 (35)实验项⽬实验⼀ENVI软件安装与基本功能操作实验⽇期2016年10⽉19⽇实验地点实验楼612同组⼈数1⼈实验类型□传统实验现代实验□其他□验证性综合性□设计性□其他⾃⽴式□合作式□研究式□其他⼀、实验⽬的熟悉遥感数据图像处理软件ENVI的安装过程,了解ENVI基本信息、基本概念及其主要特性。
对ENVI操作界⾯有⼀个基本的熟悉,对各菜单功能有⼀个初步了解,为后⾯的实验作好准备。
⼆、实验仪器设备1.硬件环境:计算机⼀台;2.软件环境:WindowsXP操作系统、ENVI4.7软件等。
三、实验原理、内容及步骤实验原理、内容:(1)遥感图像处理软件ENVI界⾯总体介绍;(2)ENVI软件能识别的图像类型介绍;(3)各种图像⽂件的打开。
实验步骤:1. ENVI的安装。
2. 遥感图像处理软件ENVI界⾯介绍。
启动ENVI后,出现主菜单条,⼀共12项:File:⽂件操作。
⽀持众多的卫星和航空传感器。
⽀持80多种图像以及⽮量数据格式的输⼊,⽀持多种格式图像⽂件的直接输⼊。
可输出的格式包括:栅格格式和⽮量格式。
Basic Tools:基本图像⼯具。
提供了多种ENVI功能的⼊⼝。
这些功能对于处理各种数据类型都是很有⽤的。
主要包括数据的调整、图像统计/分析、变化检测、波段运算、图像分割、图像掩膜。
Classification:图像分类⼯具。
《遥感原理与应用》实验报告
《遥感原理与应用》实验报告实验报告:遥感原理与应用一、实验目的通过实验了解遥感的基本原理,掌握遥感技术的基本应用方法。
二、实验仪器和材料1.遥感软件:ENVI、ERDAS、IDRISI等2.遥感数据:卫星遥感影像数据三、实验内容1.遥感影像地理信息提取通过遥感软件导入遥感影像数据,利用图像处理方法提取地理信息,如土地利用类型、植被覆盖度等。
2.遥感影像分类利用遥感影像数据进行分类分析,将影像中的不同对象或地物进行分类,如建筑物、农田、水域等。
3.遥感影像变化检测利用不同时间的遥感影像数据进行变化检测,观察地物变化的情况,如城市扩张、植被变化等。
四、实验步骤1.打开遥感软件,导入遥感影像数据。
2.使用图像处理方法提取地理信息,如选择适当的阈值进行植被覆盖度的提取。
3.利用分类分析方法将影像中的不同对象进行分类,可以使用最大似然分类方法或支持向量机分类方法等。
4.比较不同时间的遥感影像数据,通过图像差异分析方法进行变化检测。
五、实验结果通过实验,我们成功使用遥感软件导入遥感影像数据,并提取了植被覆盖度等地理信息。
同时,我们还使用分类分析方法将影像中的不同对象进行了分类,得到了建筑物、农田、水域等分类结果。
最后,我们通过比较不同时间的遥感影像数据,成功进行了变化检测,观察到了城市扩张和植被变化的情况。
六、实验感想通过这次实验,我们深入了解了遥感技术的基本原理和应用方法。
遥感技术具有非常广泛的应用领域,如环境监测、农业管理、城市规划等。
遥感影像数据可以提供大量的地理信息,通过图像处理和分类分析可以提取出有用的地理信息,同时通过变化检测可以观察到地物的变化情况。
掌握遥感技术对于我们理解地球变化、环境保护和资源利用具有重要意义。
总结:通过这次实验,我们不仅学习到了遥感技术的基本原理和应用方法,还亲自进行了实验操作,掌握了使用遥感软件进行遥感影像地理信息提取、分类分析和变化检测的基本技能。
希望今后能够将所学的遥感知识应用到实际工作中,为地球环境的保护和资源的利用做出贡献。
遥感影像分类方法实验报告

遥感影像分类方法实验报告实验报告目录1 实验目的 (4)2 实验数据 (4)3 实验内容 (4)4 实验步骤 (5)4.1 对人口矢量数据(shapefile)进行投影转换 (5)4.1.1 Census.shp文件投影坐标的检查 (5)4.1.2 将投影坐标转换为WGS_1984_UTM_Zone_16N (6)4.2 对遥感影像进行几何精校正(以经过投影变换的人口矢量数据为基准) (6)4.2.1 Census.shp在ENVI软件的加载 (6)4.2.2 对遥感影像进行几何精校正(以矢量数据为基准) (7)4.2.3 用矢量图层对遥感影像进行裁剪 (10)4.3 将Pan波段和多光谱波段进行融合,并对融合效果进行定性和定量评价 (11)4.3.1 两种融合方法的原理 (11)4.3.2 进行 Gram-Schmidt Spectral Sharpening融合 (11)4.3.4 融合效果进行定性评价 (14)4.3.5 融合效果进行定量评价(软件提供的计算方法) (15)4.3.6 融合效果进行定量评价(Matlab编程计算) (16)4.3.7 遥感影像融合定量分析代码 (20)4.4 生成住房密度栅格影像 (23)4.4.1 两表的连接 (23)4.4.2 计算房屋密度 (24)4.4.3 直接栅格化 (25)4.4.4 IDW插值 (25)4.4.5 对房屋密度图进行重分类 (26)4.5 将住房密度栅格影像作为额外的通道与ETM+多光谱波段进行叠加 (26)4.6 监督分类(融合方法为HSV,波段为5,4,3) (27)4.6.1 打开Google Earth影像作为监督分类的参照 (27)4.6.2 建立兴趣区 (29)4.6.3 训练样区的选择 (30)4.6.4 训练样区的评价 (31)4.6.5 执行监督分类 (33)4.6.6 分类后处理 (35)4.6.7 评价结果分析 (37)4.6.8 分类结果面积统计 (38)4.6.9 分类结果 (41)4.7 分类结果评价与分析 (41)4.7.1 未加入房屋密度图层的分类结果评价与分析 (41)4.7.2 加入IDW插值房屋密度图层的分类结果评价与分析 (42)4.7.3 加入直接栅格化房屋密度图层的分类结果评价与分析 (43)4.7.4 加入重分类后IDW插值房屋密度图层的分类结果评价与分析 (44)4.7.5 从总精度与Kappa系数对分类结果进行评价 (45)4.7.6 分类结果总体评价 (46)4.7.7 与其他训练样区的分类精度和Kappa系数的计算 (48)4.8 决策树分类 (49)4.8.1 决策树分类原理 (49)4.8.2 数据预处理 (49)4.8.3 指数的计算 (51)4.8.4 执行决策树 (54)4.8.5 不同参数设置的对比 (57)5 实验体会 (60)5.1 实验中存在的问题 (60)5.2 软件平台使用 (63)5.3 实验总结 (63)1 实验目的①掌握ArcGIS10和ENVI4.7对遥感图像处理的基本操作与原理②熟悉几何精校正的方法,掌握ENVI软件对遥感影像进行几何精校正③掌握全色波段与多光谱波段的融合方法和原理,学会对融合效果进行定性定量分析④熟悉掌握ArcGIS的栅格化方法和IDW插值方法⑤熟悉监督分类的方法和基本原理,掌握ENVI软件中进行监督分类⑥了解监督分类后评价过程,对分类结果进行精度评价和分析⑦掌握Erdas的空间建模方法以及原理⑧了解RuleGen算法,掌握决策树分类方法2 实验数据①带属性数据的shapefile:Census.shp②带有陆地面积字段的矢量图层:③ GoogleEarth_原始拼接:GE1005211134.jpg④研究区域的多光谱波段数据:Stack_b1-6162-7.img⑤研究区域的全色波段数据:b8.img⑥监督分类参照影像:Google Earth3 实验内容①对人口矢量数据(shapefile)进行投影转换:WGS_1984_UTM_Zone_16N②对遥感影像进行几何精校正(以经过投影变换的人口矢量数据为基准):(1)对多光谱波段(30 m空间分辨率)进行几何精校正(小于0.25个像元);(2)对Pan波段(15 m空间分辨率)进行几何精校正(小于0.25个像元);③将Pan波段和多光谱波段进行融合(自选至少一种融合算法),并对融合效果进行定性和定量评价;④生成住房密度栅格影像:(1)直接栅格化;(2) IDW插值;⑤将住房密度栅格影像作为额外的通道(或波段)与ETM+多光谱波段进行叠加;⑥进行监督分类和分类后处理(Post-Classification,Expert Rules)⑦利用ERDAS软件的空间建模(Spatial Modeler)进行水体信息(MNDWI指数)和植被信息(NDVI指数)的提取;⑧利用“自动阈值决策树分类算法”进Marion County的土地利用/覆盖分类信息提取(使用的数据:原始各波段+MNDWI+NDVI+ISODATA等,或其他有益的波段组合)①探讨“自动阈值决策树分类算法”中的各个参数意义及如何设置更合理②对分类结果进行评价与分析⑨对分类结果进行精度评价和分析;4 实验步骤4.1 对人口矢量数据(shapefile)进行投影转换4.1.1 Census.shp文件投影坐标的检查根据实验要求,人口矢量数据(shapefile)进行投影坐标应为:WGS_1984_UTM_Zone_16N 在ArcGIS软件的图层右击Properties,在Layer Properties的Source下查看投影信息,如图1。
遥感原理与应用实习报告
实验一、ERDAS视窗的基本操作实验目的:初步了解目前主流的遥感图象处理软件ERDAS的主要功能模块,在此基础上,掌握视窗操作模块的功能和操作技能,为遥感图像的几何校正等后续实习奠定基础。
实验内容:视窗功能介绍;文件菜单操作;实用菜单操作;显示菜单操作;矢量和删格菜单操作等。
视窗操作是ERDAS软件操作的基础, ERDAS所有模块都涉及到视窗操作。
本实验要求掌握视窗的基本功能,熟练掌握图像显示操作和矢量菜单操作,从而为深入理解和学习ERDAS软件打好基础。
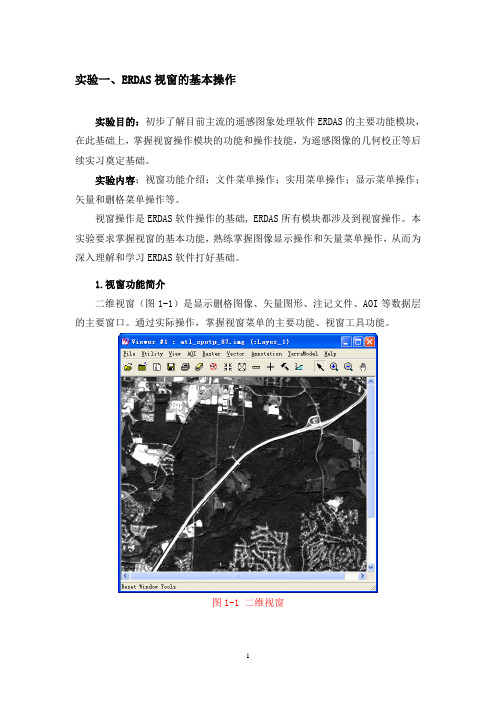
1.视窗功能简介二维视窗(图1-1)是显示删格图像、矢量图形、注记文件、AOI等数据层的主要窗口。
通过实际操作,掌握视窗菜单的主要功能、视窗工具功能。
图1-1 二维视窗2、图像显示操作(Display an Image )第一步:启动程序(Start Program )视窗菜单条:File →open → RasterLayer →Select Layer To Add 对话框。
第二步:确定文件(Determine File )在Select Layer To Add 对话框中有File 和Raster Option 两个选择项,其中File 就是用于确定图像文件的,具体内容和操作实例如表。
表1-1 图像文件确定参数第三步:设置参数(Raster option )图1-2 参数设置第四步:打开图像(Open Raster Layer )3.实用菜单操作了解光标查询功能;量测功能;数据叠加功能;文件信息操作。
4、显示菜单操作掌握文件显示顺序(图1-3);显示比例;显示变换操作等。
5、矢量菜单操作矢量菜单操作功能是ERDAS软件将遥感与地理信息系统相结合的一个体现。
主要介绍矢量操作的有关命令,这是本次实验的重点掌握内容。
指导学生掌握适量工具面板功能,在此基础上重点掌握矢量文件的生成与编辑。
矢量文件的生成与编辑:第一步:打开图像文件第二步:创建图形文件第三步:绘制图形要素第四步:保存矢量文件在此基础上,指导学生掌握:改变矢量要素形状;调整矢量要素特征;编辑矢量属性数据等有关矢量操作。
遥感影像实习报告

一、实习背景随着遥感技术的发展,遥感影像在地理信息、环境监测、城市规划等领域得到了广泛应用。
为了提高我们对遥感影像处理和分析的能力,我们开展了为期两周的遥感影像实习。
本次实习旨在让我们了解遥感影像的基本原理,掌握遥感影像处理软件的使用方法,并能对遥感影像进行初步的解译和分析。
二、实习内容1. 遥感影像基础知识实习期间,我们首先学习了遥感影像的基本原理,包括遥感数据的获取、处理、分析等环节。
了解了遥感影像的成像原理、成像模型、传感器类型等基本概念。
2. 遥感影像处理软件学习我们主要学习了ENVI软件的使用。
通过实习,我们掌握了以下操作:(1)数据导入与导出:学会了如何将遥感影像数据导入ENVI软件,以及如何导出处理后的影像数据。
(2)图像预处理:学会了如何对遥感影像进行辐射校正、几何校正、大气校正等预处理操作。
(3)图像增强:学会了如何对遥感影像进行对比度增强、亮度增强、锐化等增强操作。
(4)图像分类:学会了如何对遥感影像进行监督分类和非监督分类,以及如何提取地物信息。
3. 遥感影像解译与分析在实习过程中,我们对实习区域进行了遥感影像解译与分析。
主要内容包括:(1)地物识别:通过对遥感影像进行解译,识别实习区域内的主要地物类型,如水体、植被、建筑等。
(2)变化检测:对比不同时期的遥感影像,分析实习区域内的地物变化情况。
(3)专题图制作:根据遥感影像解译结果,制作实习区域的专题图,如土地利用现状图、植被覆盖度图等。
三、实习成果通过本次实习,我们取得了以下成果:1. 掌握了遥感影像处理软件ENVI的基本操作,能够对遥感影像进行预处理、增强、分类等操作。
2. 提高了遥感影像解译与分析能力,能够对实习区域内的地物进行识别和变化检测。
3. 了解了遥感技术在地理信息、环境监测、城市规划等领域的应用,为今后从事相关领域的工作奠定了基础。
四、实习体会本次遥感影像实习让我们受益匪浅。
在实习过程中,我们不仅学到了遥感影像处理和分析的基本知识,还提高了实际操作能力。
《遥感原理与应用》实验报告四

《遥感原理与应用》实验报告四实验七图像特征变换一、实验目的1.掌握图像特征变换的意义和概念。
2.掌握主成分变换(K-L变换)的原理。
3.掌握穗帽变换(K-T变换)的原理。
4.掌握使用ENVI对遥感影像进行图像特征变换的方法和步骤。
二、实验原理特征变换是将原有的m个测量值集合并通过某种变换,产生n个(n≤m)新的特征。
特征变换的作用表现在两个方面:一方面减少特征之间的相关性,使得尽可能少的特征来最大限度包含原始数据的信息;另一方面使得待分类别之间的差异在变换后的特征中更明显,从而改善分类效果。
主成分变换是生成互不相关的输出波段,达到隔离噪声和减少数据集的维数的方法。
主成分波段是原始波段的线性合成,一般情况下,前三个主成分包含波段的绝大部分信息。
由于数据不相关,主成分可以生成颜色更多、饱和度更好的彩色合成图像。
穗帽变换是一种线性特征变换,变换后的前三个分量表示亮度、绿度和湿度,可以较好地分离土壤和植被。
三、实验内容1.主成分变换(1)主成分正变换,选择Transform→PCA Rotation→Forward PC Rotation New Statistics andRotate,在弹出的对话框中选择图像文件。
(2)在弹出的Forward PC Parameters对话框中,选择默认参数,设定输出路径和文件名,注意要保存统计文件(.sta),输出类型为Floating Point。
完成主成分正变换,变换后的波段主要信息集中在第一主成分中。
(3)选择Statistics→View Statistics File,查看统计文件(.sta),了解基本统计值、协方差矩阵、相关系数、特征向量和特征值。
(4)主成分逆变换,选择Transform→PCA Rotation→Inverse PCA Rotation,选择逆变换图像文件,点击OK,再选择统计文件(.sta),完成逆变换。
2.穗帽变换(1)穗帽变换,选择Transform→Tasseled Cap,设置穗帽变换参数,选择输入的文件类型,制定输出的文件名。
遥感影像处理实验报告(3篇)
第1篇一、实验背景与目的随着遥感技术的不断发展,遥感影像已成为获取地球表面信息的重要手段。
遥感影像处理是对遥感影像进行一系列技术操作,以提高影像质量、提取有用信息的过程。
本实验旨在通过实践操作,让学生掌握遥感影像处理的基本原理和常用方法,提高学生对遥感影像数据的应用能力。
二、实验内容与步骤本次实验主要包括以下内容:1. 数据准备:获取实验所需的遥感影像数据,包括光学影像、红外影像等。
2. 影像预处理:对原始遥感影像进行辐射校正、几何校正、图像增强等处理。
3. 影像分割:对预处理后的影像进行分割,提取感兴趣的目标区域。
4. 影像分类:对分割后的影像进行分类,识别不同的地物类型。
5. 结果分析:对分类结果进行分析,评估分类精度。
三、实验步骤1. 数据准备- 获取实验所需的遥感影像数据,包括光学影像、红外影像等。
- 确保影像数据具有较好的质量和分辨率。
2. 影像预处理- 辐射校正:对原始遥感影像进行辐射校正,消除大气、传感器等因素对影像辐射强度的影响。
- 几何校正:对原始遥感影像进行几何校正,消除地形起伏、地球曲率等因素对影像几何形状的影响。
- 图像增强:对预处理后的影像进行图像增强,提高影像对比度、清晰度等。
3. 影像分割- 选择合适的分割方法,如基于阈值分割、基于区域生长分割、基于边缘检测分割等。
- 对预处理后的影像进行分割,提取感兴趣的目标区域。
4. 影像分类- 选择合适的分类方法,如监督分类、非监督分类等。
- 对分割后的影像进行分类,识别不同的地物类型。
5. 结果分析- 对分类结果进行分析,评估分类精度。
- 分析分类结果中存在的问题,并提出改进措施。
四、实验结果与分析1. 影像预处理结果- 经过辐射校正、几何校正和图像增强处理后,遥感影像的质量得到显著提高,对比度、清晰度等指标明显改善。
2. 影像分割结果- 根据实验所采用的分割方法,成功提取了感兴趣的目标区域,分割效果较好。
3. 影像分类结果- 通过选择合适的分类方法,对分割后的影像进行分类,成功识别了不同的地物类型。
遥感分类的实习报告

一、实习背景与目的随着遥感技术的飞速发展,遥感分类在资源调查、环境监测、灾害预警等领域发挥着越来越重要的作用。
本次实习旨在通过实际操作,让学生掌握遥感分类的基本原理和方法,提高学生运用遥感数据解决实际问题的能力。
二、实习内容本次实习主要内容包括:1. 遥感影像数据获取与预处理:学习遥感影像数据的获取途径,掌握遥感影像预处理方法,包括辐射校正、几何校正、裁剪等。
2. 遥感影像特征提取:学习遥感影像特征提取方法,包括光谱特征、纹理特征、形状特征等。
3. 遥感分类方法:学习常用的遥感分类方法,如监督分类、非监督分类、模糊分类等。
4. 分类结果评价与优化:学习分类结果评价方法,如混淆矩阵、Kappa系数等,并对分类结果进行优化。
三、实习过程1. 遥感影像数据获取与预处理实习初期,我们学习了遥感影像数据的获取途径,包括卫星遥感数据、航空遥感数据等。
通过实际操作,我们掌握了遥感影像预处理方法,如辐射校正、几何校正、裁剪等。
以Landsat 8影像为例,我们进行了以下预处理步骤:(1)辐射校正:使用ENVI软件对Landsat 8影像进行辐射校正,消除大气、传感器等因素对影像辐射值的影响。
(2)几何校正:选择地面控制点,对Landsat 8影像进行几何校正,消除影像几何变形。
(3)裁剪:根据研究区域范围,对Landsat 8影像进行裁剪,提取研究区域内的影像数据。
2. 遥感影像特征提取在遥感影像特征提取环节,我们学习了光谱特征、纹理特征、形状特征等提取方法。
以监督分类为例,我们选取了以下特征:(1)光谱特征:利用ENVI软件提取Landsat 8影像的波段组合,计算波段间的比值、比值比等光谱指数。
(2)纹理特征:利用ENVI软件提取Landsat 8影像的纹理特征,如灰度共生矩阵、局部方差等。
(3)形状特征:利用ENVI软件提取Landsat 8影像的形状特征,如面积、周长、形状因子等。
3. 遥感分类方法在遥感分类环节,我们学习了监督分类、非监督分类、模糊分类等常用方法。
初识遥感影像实验报告(3篇)
第1篇一、实验背景随着遥感技术的不断发展,遥感影像在地理信息科学、环境监测、城市规划等领域得到了广泛应用。
为了深入了解遥感影像的基本原理和应用方法,我们开展了本次遥感影像实验。
通过实验,旨在培养学生对遥感影像的认识,掌握遥感影像处理的基本技能,并能够运用遥感影像进行简单的分析和应用。
二、实验目的1. 了解遥感影像的基本概念和分类。
2. 掌握遥感影像的获取方法和数据格式。
3. 学习遥感影像的基本处理方法,包括图像增强、几何校正和图像分类。
4. 熟悉遥感影像在地理信息分析中的应用。
三、实验内容1. 遥感影像基本概念与分类(1)遥感影像的定义:遥感影像是指通过遥感传感器从地球表面或其他天体表面获取的图像数据。
(2)遥感影像的分类:按获取平台分为航空遥感影像和航天遥感影像;按传感器类型分为光学遥感影像和雷达遥感影像;按应用领域分为资源遥感影像、环境遥感影像和灾害遥感影像等。
2. 遥感影像获取方法(1)航空遥感影像:通过飞机搭载的遥感传感器获取,具有高分辨率、高精度等特点。
(2)航天遥感影像:通过卫星搭载的遥感传感器获取,具有大范围、大动态范围等特点。
3. 遥感影像数据格式(1)TIFF格式:支持多种数据类型,广泛应用于遥感影像处理。
(2)JPEG格式:压缩效果好,但可能损失部分图像信息。
(3)GeoTIFF格式:包含地理信息,便于地理信息分析。
4. 遥感影像处理(1)图像增强:通过对遥感影像进行增强处理,提高图像质量,便于后续分析。
(2)几何校正:将遥感影像进行几何校正,使其符合实际地理坐标。
(3)图像分类:根据遥感影像的灰度值、纹理、光谱等信息,对地表物体进行分类。
5. 遥感影像应用(1)地理信息分析:通过遥感影像进行地形、地貌、土地利用等地理信息的分析。
(2)环境监测:利用遥感影像监测植被覆盖、水质、大气污染等环境问题。
(3)城市规划:通过遥感影像进行城市规划、土地管理等工作。
四、实验步骤1. 准备实验数据:收集遥感影像数据,包括航空遥感影像和航天遥感影像。
遥感影像实验报告

一、实验目的本次实验旨在通过遥感影像处理软件ENVI,学习遥感影像的基本处理方法,掌握遥感影像的辐射校正、几何校正、分类和变化检测等关键技术,提高遥感影像处理能力,为后续遥感应用研究打下基础。
二、实验内容1. 辐射校正(1)实验原理:辐射校正是指消除遥感影像中由于传感器、大气、太阳等因素引起的辐射失真,使影像数据真实反映地物辐射特性。
(2)实验步骤:① 打开ENVI软件,导入遥感影像数据;② 选择“Radiometric Correction”模块;③ 选择“Flattening”方法进行辐射校正;④ 保存校正后的影像数据。
2. 几何校正(1)实验原理:几何校正是指消除遥感影像中由于传感器姿态、地球曲率等因素引起的几何失真,使影像数据真实反映地物空间位置。
(2)实验步骤:① 打开ENVI软件,导入遥感影像数据;② 选择“Geometric Correction”模块;③ 选择“Warp”方法进行几何校正;④ 输入校正参数,如坐标系统、校正方法等;⑤ 保存校正后的影像数据。
3. 分类(1)实验原理:遥感影像分类是指根据遥感影像数据中地物光谱和纹理信息,将影像分割为不同地物类别的过程。
(2)实验步骤:① 打开ENVI软件,导入遥感影像数据;② 选择“Classification”模块;③ 选择“Supervised Classification”方法进行监督分类;④ 输入训练样本,设置分类变量;⑤ 选择分类结果输出格式,如分类图层、分类报告等;⑥ 保存分类结果。
4. 变化检测(1)实验原理:遥感影像变化检测是指通过对比同一地区不同时期的遥感影像,分析地物变化信息的过程。
(2)实验步骤:① 打开ENVI软件,导入遥感影像数据;② 选择“Change Detection”模块;③ 选择“Image Difference”方法进行变化检测;④ 输入对比影像,设置变化阈值;⑤ 保存变化检测结果。
三、实验结果与分析1. 辐射校正:通过辐射校正,影像数据的光谱特性得到了有效恢复,地物辐射特性得到了真实反映。
遥感影像分类技术的基本原理与应用方法

遥感影像分类技术的基本原理与应用方法一、引言随着科技的不断进步,遥感技术在地理信息系统、环境监测、农业资源管理等领域发挥着越来越重要的作用。
遥感影像分类技术是其中的核心技术之一,目前已经得到广泛应用。
本文将从基本原理和应用方法两个方面介绍遥感影像分类技术的相关内容。
二、基本原理1. 数字图像处理遥感影像在获取过程中通常以数字形式保存,因此对其进行数字图像处理是分类技术的基础。
图像的预处理包括辐射定标、大气校正、几何纠正等,以消除影像中的噪声和失真,提高分类的准确性。
2. 特征提取在进行遥感影像分类之前,需要对图像进行特征提取。
常用的特征有光谱特征、纹理特征、形状特征等。
光谱特征是指利用不同波段的反射率信息进行分类,纹理特征是指图像的纹理变化进行分类,形状特征是指目标的外形进行分类。
特征提取的准确性和有效性对分类结果至关重要。
3. 分类器设计分类器是遥感影像分类中的一个关键组成部分。
常用的分类器有最大似然分类器、支持向量机、决策树等。
最大似然分类器是一种经验概率分类器,根据各个类别的似然概率进行分类;支持向量机是通过找到一个最佳的超平面对样本进行分类;决策树是通过对样本的分裂和合并来构建分类模型。
不同的分类器适用于不同的场景和数据特点,选择合适的分类器对分类结果具有重要影响。
三、应用方法1. 地物分类地物分类是遥感影像分类的主要应用之一。
通过对遥感影像中各种地物(如建筑物、道路、植被等)进行分类,可以快速、准确地获取地理信息,为城市规划、土地利用等方面的决策提供必要的支持。
地物分类需要考虑光谱特征、纹理特征等因素,并结合地物的特点进行分类器的选择和设计。
2. 环境监测遥感影像分类技术在环境监测方面也具有广泛应用。
通过对污染源、水体变化等进行分类,可以帮助监测地表环境变化,提醒有关部门及时采取措施,保护环境质量。
环境监测中遥感影像分类需要考虑时间序列数据的特点,并结合相关指标进行分类器的选择和设计。
遥感原理及应用实验报告(1)

遥感原理及应用实验报告(1)遥感原理及应用实验报告一、实验目的本次实验的主要目的是通过对遥感原理的学习,了解遥感技术的基本概念和原理,并掌握遥感技术的基本应用。
二、实验原理1.遥感技术的基本概念遥感技术是指利用空间平台载体进行成像和非成像观测的科学与技术,以获取地球自然和人文环境信息的一种技术手段。
遥感技术通过对地物的光谱、空间和时序等特征进行分析,可以反映出地球表面各种信息,是现代研究地球环境的重要工具之一。
2.遥感技术的基本原理遥感技术主要依据电磁波在不同介质中的传播和反射、折射、散射等现象进行信息获取和分析。
遥感技术的主要原理可归纳为以下几个方面:(1)电磁波的能量吸收和反射特性:不同类型的地物对电磁波的吸收和反射特性不同,可用于了解它们的构成和性质;(2)电磁波在不同频段的反射和穿透特性:不同波段的电磁波对不同深度的地物有所区别,用于获取不同深度的地物信息;(3)电磁波传输与遥感器探测原理:了解遥感器的探测方式和数据处理方式,实现对地表信息的提取。
三、实验步骤及结果本次实验主要包括遥感影像解译和遥感应用两个部分。
1.遥感影像解译:采用卫星影像的高精度解译技术,利用专业软件对影像进行解译,获取有用信息。
解译结果主要包括场地牧草的种类、植被覆盖程度、植被指数等信息。
2.遥感应用:利用遥感数据和分析结果,实现对地球环境变化的监测和预警。
应用结果主要包括草原植被退化与恢复、水资源分析与管理等信息分析。
四、实验结论本次实验通过对遥感原理与应用实现的学习和实践,了解了遥感技术的基本概念、原理和应用,掌握了遥感技术的基础操作与处理方法。
同时,通过遥感数据的分析,对草原植被的生态环境进行了监测和预警,对于推动生态文明建设和可持续发展具有重要意义。
遥感原理与应用实验报告
遥感原理与应用实验报告一、实验目的本次实验旨在通过实际操作和数据分析,深入理解遥感的基本原理,并掌握其在不同领域的应用方法。
具体包括:1、熟悉遥感数据的获取、处理和分析流程。
2、学会运用遥感图像处理软件,对遥感影像进行几何校正、辐射校正、图像增强等操作。
3、掌握遥感图像的分类方法,如监督分类和非监督分类,并对分类结果进行精度评价。
4、应用遥感技术解决实际问题,如土地利用/覆盖变化监测、植被指数提取等。
二、实验原理遥感是一种非接触式的对地观测技术,它通过传感器接收来自地面物体反射或发射的电磁波信息,并对这些信息进行处理、分析和解译,从而获取有关地球表面的特征和现象。
遥感的物理基础是电磁波与物质的相互作用。
不同的地物具有不同的电磁波反射、吸收和发射特性,这些特性可以通过遥感传感器测量的电磁波谱来表征。
例如,植被在近红外波段具有高反射率,而水体在可见光和近红外波段的反射率较低。
遥感图像的处理和分析基于数字图像处理技术。
几何校正用于消除遥感图像的几何变形,使其与实际地理坐标相匹配;辐射校正用于消除传感器误差和大气影响,使图像的辐射值准确反映地物的真实反射或发射特性;图像增强用于突出图像中的有用信息,提高图像的可读性和可解译性;图像分类则是根据图像中像元的特征将其划分为不同的类别,以提取地物信息。
三、实验设备与数据1、计算机:配置较高的个人计算机,用于运行遥感图像处理软件。
2、遥感图像处理软件:如 ENVI、ERDAS 等。
3、实验数据:包括不同分辨率的卫星遥感影像,如 Landsat、SPOT 等,以及相应的辅助数据,如地形图、土地利用现状图等。
四、实验步骤1、数据导入与预处理将遥感影像数据导入图像处理软件。
对影像进行辐射定标和大气校正,以消除大气对电磁波传输的影响。
2、几何校正选取地面控制点(GCP),这些点在遥感影像和参考地图上具有明确的地理位置。
通过计算 GCP 的坐标偏差,建立几何校正模型,对影像进行几何校正。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验名称:影像分类
一、实验内容
1.对同一副遥感影像分别用监督和非监督两种方法进行分类,并对分类结果进行比较;
2.对同一种方法下的不同判别准则(如最小距离准则和最大似然分类)得到的分类结果进行
比较。
二、实验所用的仪器设备,包括所用到的数据
电脑一台,Window7操作系统,遥感影像处理软件(ENVI4.3)软件,一幅多波段卫星遥感影像,如图1所示。
三、实验原理
(一)监督分类
1.监督分类的原理
监督分类(supervised classification)又称训练场地法,是以建立统计识别函数为理论基础,依据典型样本训练方法进行分类的技术。
即根据已知训练区提供的样本,通过选择特征参数,求出特征参数作为决策规则,建立判别函数以对各待分类影像进行的图像分类,是模式识别的一种方法。
要求训练区域具有典型性和代表性。
判别准则若满足分类精度要求,则此准则成立;
反之,需重新建立分类的决策规则,直至满足分类精度要求为止。
常用算法有:平行算法、最小距离法、最大似然法等。
2.最小距离分类:是指求出未知类别向量到要识别各类别代表向量中心点的距离,将未知类
别向量归属于距离最小一类的一种图像分类方法。
3.最大似然分类:假定每个波段每一类统计呈均匀分布,并计算给定像元属于一特定类别的
可能性。
除非选择一个可能性阈值,所有像元都将参与分类,每一个像元被归到可能性最大的那一类里。
(二)非监督分类
1.非监督分类的原理
非监督分类也称聚类分析。
是指人们事先对分类过程不施加任何的先验知识,而仅凭数据,即自然聚类的特性,进行“盲目”的分类;其分类的结果只是对不同类别达到了区分,但并不能确定类别的属性,亦即:非监督分类只能把样本区分为若干类别,而不能给出样本的描述;其类别的属性是通过分类结束后目视判读或实地调查确定的。
2.ISODATA分类
ISODATA非监督分类计算数据空间中均匀分布的类均值,然后用最小距离技术将剩余像元迭代聚集。
每次迭代重新计算了均值,且用这一新的均值对像元进行再分类。
重复分类是分割、融合和删除是基于输入的阈值参数的。
除非限定了标准差和距离的阈值(这时,如果一些像元不满足选择的标准,他们就无法参与分类),所有像元都被归到与其最临近的一类里。
这一过程持续到每一类的像元数变化少于选择的像元变化阈值或已经到了迭代的最多次数。
四、实验步骤及其结果分析
(一)ISODATA分类
1.选择Classification > Unsupervised > Isodata.
2.出现Classification Input File 对话框,进行标准文件选择。
3.点击“OK”,显示ISODATA Parameters 对话框,分别在各个文本框中输入合适的参数。
点
击“OK”,开始进行独立数据分类。
图像中每一个波段将计算统计值,屏幕上出现一条状态
信息,显示操作进展过程。
信息随着分类器的每一次迭代在0 到100% 之间循环。
4.显示结果影像,如图2所示。
5.改变参数设置
(1)将Number of Classes(分类数)由5-10改为1-50,显示结果如图3所示。
(2)将Maximum Iteration(最大迭代数)由1改为10,显示结果如图4所示。
(3)将Chang Threshold(像元变化的阈值)由5.00改为1.00,显示结果如图5所示。
(4)将其它各个参数分别更改,结果肉眼看不出明显区别,均如图2(默认参数值)所示。
6.通过Class Cloor Mapping对话框,改变各分类颜色,如将植被改为白色,结果如图6所示。
7.结果分析:
(1) ISODATA分类中获知地物类别属性的方法
使用默认参数值时将结果分为了8类,但是每类地物的具体属性,只利用结果影像并不容易判断出来。
这是由于非精度分类时人们事先对分类过程不施加任何的先验知识,而
仅凭数据,即自然聚类的特性,进行“盲目”的分类。
其类别的属性是通过分类结束后目视
判读或实地调查确定的。
(2) ISODATA Parameters 对话框各个参数的含义
在ISODATA Parameters 对话框各个参数的含义分别是:Number of Classes(分类数),Min(最少分类数)、Max(最大分类数),Maximum Iteration(最大迭代数),Chang Threshold (像元变化的阈值),Minimum #Pixel in Class(每类中的最小像元数),Maximum Class Stdv (最大标准差),Minimum Class Distance (最小类间距),Maximum #Merge Pairs(最大合并数)等8个基本参数。
◆改变分类数的范围大小可以改变分类精度,例如将分类数改为1-50时,如图3所示,影
像中颜色种类明显增多,经统计,分类结果有26类。
◆改变最大迭代数可以增加迭代次数,例如将其改为10时,影像进行了4次迭代,如图4
所示,影像中颜色种类有所增加,经统计后分类结果有11类。
影像进行多次迭代,每次迭代重新计算均值,且用这一新均值对像元进行再分类。
◆改变像元变化的阈值,同样会影像迭代次数,例如,当最大迭代次数为10时,将像元
变化的阈值改由5改为1,则表示当每一类像元数变化小于1时,由变化阈值来结束迭代过程,共进行了10次迭代,虽然分类总是没有增加,但是各类别的范围及颜色均有所变化。
(二)最小距离和最大似然分类
1.根据图像特征,选取感兴趣区。
对感兴趣区域进行编辑。
2.ENVI主菜单下选择Classification > Supervised >Minimum Distance和Maximum Likelihood
分别进行最小距离和最大似然分类。
分类结果分别如图7、图8所示。
3.结果分析
(1) 最小距离和最大似然分类的比较
最小距离法与最大似然法的结果影像初看之下十分相近,但通过链接比较,发现仍存在细节上的差别。
例如对比影像右上角植被的区分度,可以看出最大似然法的精度明显高于最小距离法。
最小距离分类原理简单,分类精度不高,但计算速度快,它可以在快速浏览分类概况中使用。
最大似然法是建立在贝叶斯准则基础上的,其分类错误概率较小,是监督分类方法中风险最小的判决分析,是典型的和应用最广的监督分类方法。
而二者相同的不足之处是传统的人工采样方法工作量大,效率低,加上人为误差的干扰,使得分类结果的精度较差。
(2) 监督分类与非监督分类的主要区别
通过比较二者的分类结果,可以看出,非监督分类所分类别较多,结果影像比较杂乱,而监督分类只分成了我们需要的三类,控制起来较为容易。
从效果上看,监督分类较好,但是从省时角度看,非监督分类较好。
二者的根本区别点在于是否利用训练场地来获取先验的类别知识。
监督分类根据训练场提供的样本选择特征参数, 建立判别函数, 对待分类点进行分类。
因此, 训练场地选择是监督分类的关键。
由于训练场地要求有代表性, 训练样本的选择要考虑到地物光谱特征, 样本数目要能满足分类的要求, 有时这些还不易做到, 并且需要较多的人力时间,这是监督分类不足之处。
相比之下, 非监督分类不需要更多的先验知识, 它根据地物的光谱统计特性进行分类。
因此, 非监督分类方法简单, 且分类具有一定的精度,但是得到的集群但类别不一定对应分析者想要的类别,难对产生的类别进行控制,并且不同图像间的对比较为困难。
五、思考题
该地区地物可以分成3大类,分别是植被,水体和土壤。
每大类下面又可根据组成成分、周围环境等的差异,细分为多个小类。
分类方法首先可以通过目视解译,对比不同地物的色调、形状、空间位置特征等判读标志,结合地物的反射光谱信息,对地物进行初步分类。
然后与建立在对像元灰度值的统计、运算、对比和归纳基础上进行的计算机分类的结果,相互检验,以提高分类精度。
要想得到好的分类精度,方法上应注意综合利用多种方法参与分类过程,比如遥感影像有着丰富的纹理信息,遥感影像的纹理分析已成为一种重要的提高遥感影像分类精度的手段,同时可以进行多源遥感信息复合分析等方法。
而操作中应注意选择质量较好的影像、准确的选择训练区并且结合分类后进一步的处理,以提高影像精度。
六、实验中遇到的问题及解决方法
问题:在进行监督分类时,没有选取ROI,软件提示操作错误。
解决方法:通过查阅资料了解到进行监督分类之前必须先选取感兴趣区。
七、实验附图
图1 原始影像(TM432(RGB)) 图2 ISODA TA分类的结果影像
图3 分类数改为1-50的结果影像图4 最大迭代数改为10的结果影像
图5 修改其他参数得到的结果影像图6 植被颜色改为白色的结果影像
图7 最小距离法分类的结果影像 图8 最大似然法分类的结果影像。