所有宏程序编程代码[1]
FANUC系统宏程序编程

FANUC系统宏程序编程FANUC系统宏程序编程一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号(#)和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型变量号变量类型功能#0空变量该变量总是空,没有值能赋给该变量.#1-#33局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为空.调用宏程序时,自变量对局部变量赋值,#100-#199#500-#999公共变量公共变量在不同的宏程序中的意义相同.当断电时,变量#100-#199初始化为空.变量#500-#999的数据保存,即使断电也不丢失.#1000系统变量系统变量用于读和写CNC运行时各种数据的变化,例如,刀具的当前位置和补偿值.变量值的范围局部变量和公共变量可以有0值或下面范围中的值:-1047到-10-29或-10-2到-1047如果计算结果超出有效范围,则发出P/S报警NO.111.小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000。
变量的引用为在程序中使用变量值,指定后跟变量号的地址。
当用表达式指定变量时,要把表达式放在括号中。
例如:G01X[#1+#2]F#3;被引用变量的值根据地址的最小设定单位自动地舍入。
例如:当G00X#/;以1/1000mm的单位执行时,CNC把123456赋值给变量#1,实际指令值为G00X12346.改变引用变量的值的符号,要把负号(-)放在#的前面。
例如:G00X-#1当引用未定义的变量时,变量及地址都被忽略。
cnc宏程序代码大全(加工中心指令代码大全)

cnc宏程序代码大全(加工中心指令代码大全)UG编程粥2018-9-111.字母在数控程序中的意义o:程序号,设置程序号n:节目段号,设置节目序号。
g:准备功能X/Y/Z:尺寸字符,轴移动指令视听:附加轴移动指令r:圆弧半径I/J/K:圆弧中心坐标(矢量)外宾:喂,设定喂量。
s:主轴速度,设定主轴速度。
t:刀具功能,设置刀具号。
m:辅助功能,开/关控制功能H/D:刀具偏置号,设置刀具偏置号。
P/X:延迟,设置延迟时间。
p:程序号指令,设置子程序号(如子程序调用:M98P1000)L:重复,设置子程序或固定循环的重复次数(如M98 P1000 L2,L1省略L)P/W/R/Q:参数,固定周期使用的参数(如敲击G98/(G99)G84 X_ Y_ R_ Z_ P_ F_)2.通用g代码解释G00:定位或快速移动G01:线性插值G02:圆弧插补/螺旋插补CWG03:圆弧插补/螺旋插补G04:停留时间或延迟时间例如:G04 X1000(或G04 X1.0)G04 P1000表示停留1秒。
G09:准确停止检查或准确停止检查(检查是否在目标范围内)G10:可编程数据输入G17:选择XPYP平面XP: x轴或其平行轴。
G18:选择ZPXP平面的YP: Y轴或其平行轴。
G19:选择YPZP平面ZP: Z轴或其平行轴。
G20:英寸输入G21:毫米输入G28:返回参考点检测格式:G91/(G90) G28 X__ Y__ Z__通过中间点X _ _ _ _ _ Y _ _ _ _ _ Z _ _(绝对值/增量值指令)返回参考点G29:从参考点返回G91/(G90) G29 X__ Y__ Z__通过参考点从起点到目标点X__ Y__ Z__的指令(绝对值/增量值指令)。
G30返回第二、第三和第四参考点G91/(G90)G30 P2 X _ _ Y _ _ Z _ _;回到第二个参考点(P2可以省略。
)G91/(G90)G30 P3 X _ _ Y _ _ Z _ _;回到第三个参考点G91/(G90)G30 P4 X _ _ Y _ _ Z _ _;回到第四个参考点。
vba编程代码大全
vba编程代码大全VBA编程代码大全。
VBA是Visual Basic for Applications的缩写,是一种用于Microsoft Office应用程序的编程语言。
通过VBA,用户可以编写自定义的宏和程序,以实现自动化操作和定制功能。
VBA编程在Excel、Word、PowerPoint等Office应用中都有广泛的应用,可以大大提高工作效率和数据处理的灵活性。
本文将为大家详细介绍VBA 编程中常用的代码,帮助大家更好地掌握VBA编程技能。
一、基本操作。
1. 打开VBA编辑器。
在Office应用程序中,按下Alt + F11快捷键即可打开VBA编辑器。
在VBA 编辑器中,可以编写和管理VBA代码。
2. 编写子程序。
使用Sub关键字定义一个子程序,然后在其中编写具体的VBA代码。
例如:Sub HelloWorld()。
MsgBox "Hello, World!"End Sub。
3. 运行宏。
在VBA编辑器中,可以直接运行编写好的宏程序。
也可以在Office应用程序中,通过快捷键或菜单来运行宏。
二、常用代码。
1. 操作单元格。
在Excel中,可以使用VBA来操作单元格,例如:Range("A1").Value = 100。
Range("A1").Interior.Color = RGB(255, 0, 0)。
2. 循环结构。
使用VBA可以编写各种类型的循环结构,例如For循环、Do While循环等,来实现对数据的遍历和处理。
3. 条件判断。
VBA中的If语句可以用来进行条件判断,根据不同的条件执行不同的操作,例如:If Range("A1").Value > 0 Then。
Range("B1").Value = "Positive"Else。
Range("B1").Value = "Negative"End If。
所有宏程序编程代码
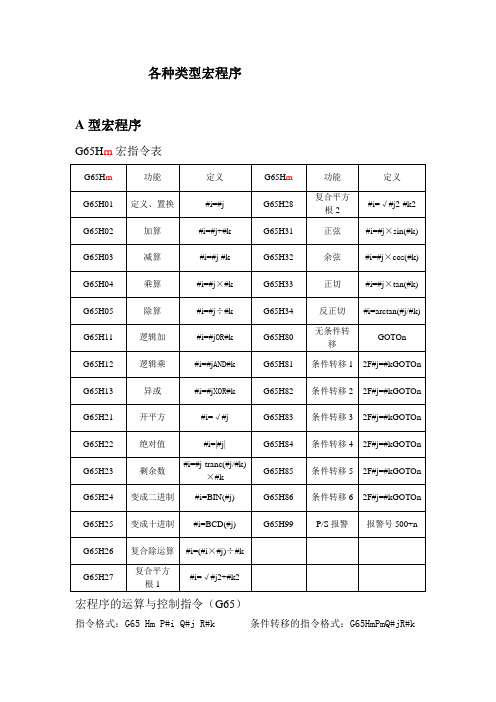
各种类型宏程序A型宏程序G65H m宏指令表宏程序的运算与控制指令(G65)指令格式:G65 Hm P#i Q#j R#k 条件转移的指令格式:G65HmPmQ#jR#k#i :储存运算结果的变量号 Hm:条件转移指令#j :进行运算的变量号1,可以是常数 Pm:转移的地址#k :进行运算的变量号2,也可是常数 Q#j R#k:转移的条件B型宏程序(FANUC 0i Mate-MC系统)运算指令1、定义和转换#i=#j2、加法运算#i=#j+#k 和#i=#j-#k 差#i=#jOR#k 或(对32位的每一位)#i=#jXOR#k 异或(对32位的每一位)3、乘法运算#i=#j×#k 积#i=#j÷#k 商#i=#jAND#k 与(对32位的每一位)4、函数#i=SIN[#j] 正弦(度)#i=COS[#j] 余弦(度)#i=TAN[#j] 正切(度)#i=ATAN[#j]/[#k] 反正切(度)#i=SQRT[#j] 平方根#i=ABS[#j] 绝对值#i=BIN[#j] 十一二进制转换#i=BCD[#j] 二一十进制转换#i=ROUND[#j] 四舍五入圆整#i=FIX[#j] 舍去小数部分#i=FUP[#j] 小数部分进位到整数5、控制指令(1)无条件转移格式:GOTOn(2)条件转移格式:IF[(条件表达式)]GOTOn(条件表达式)有如下几种#jEQ#k 即#j=#k#jNE#k #j≠#k`#jGT#k #j>#k#jLT#k #j<#k#jGE#k #j≥#k#jLE#k #j≤#k例:IF[#4EQ#0]GOTO1N10G90```````````` WHILE[<条件表达式>]DOm`` ```` ```` ``IF[#ⅹEQ#ⅹ]GOTO1 ENDm (m=1、2、3…)(上、下对应,条件满足执行)编程中的一些辅助功能坐标旋转(G68、G69)指令G68 :旋转功能的建立G69 :旋转功能的取消指令的格式G17G18 G68X Y R [X、Y、Z(I、J、K)以G54定旋转中心的坐标,R为旋转角度]G19G17(G18或G19)平面的选择,在其上包括旋转的形状X Y :与G17、G18、G19相应的X、Y和Z中的两个轴的绝对指令,在G68后面指定旋转中心,当不指令时,则G68程序段的刀具位置被认为旋转中心。
第6章 宏程序指令编程
例6-4 如图6-5所示,在立式加工中心上铣削内半球体。假 设大部分余量已通过预钻孔去除,现选用适当直径的球头铣刀 (φ12)对半球体进行精加工。若要用同一程序以及用不同半径的 球头铣刀加工不同半径的内球体,则对球体和球头铣刀的半径 用变量表示。若内球体半径为SR,铣削时刀具中心轨迹半径为 RP,球头铣刀半径为r,若每步铣刀沿着z向进刀的角度为α, 则图中刀具进给时刀具中心的坐标为: X=RPCOSα; Z= RPSINα; 主程序中使用如下程序段调 用宏程序: C65 Aa Bb Dd; ’ 其中: Aa:内球体半径(#1); Bb:球头铣刀半径(#2); Dd:每步进刀的角度(#7)。
6.1.1 变量
1、变量的表示
——(变量号i=0,1,2,3,4……) 例:#8、#110、#1100 #i ——表达式必须用括号括起来 例:#[#1+#2-12] #[表达 式] 2、变量的引用 例:F#10——当#10=20时,F20被指令。 <地址>#1 X- #20——当#20=100.时,X-100.被指令。 <地址> - #1 G#130——当#130=2时,G2被指令。
举例:求1到10之和。
O7200; #1=0; #2=1; WHILE [#2 LE 10] DO 1; #1 =#1+#2; #2=#2+1; END 1; M30;
6.2 数控车床宏程序指令编程
例6-1 加工如图6-1所示的槽
主程序为: 宏程序为:
应用调用指令:G66 P9110 U u F f 式中:u——槽深,增量值; f——槽加工的进给速度
系统变 量
固定用途的变 量
4、自变量的赋值 自变量赋值Ⅰ ——使用除去G、L、N、O、P以外的其他字母作为 地址。
新代宏程序编程一百例
新代宏程序编程一百例新代宏程序编程是一种用于自动化任务的编程技术,它能够帮助我们简化重复性的工作,提高工作效率。
下面我将给出一百个不同的例子,展示新代宏程序编程的多样性和应用场景。
1. 自动化数据清洗和整理。
2. 批量重命名文件。
3. 自动化生成报告和文档。
4. 自动化发送电子邮件。
5. 自动化网页数据抓取。
6. 批量处理图像或照片。
7. 自动化填充表单。
8. 自动化网页表单提交。
9. 自动化网页测试和自动化测试脚本。
10. 自动化爬虫程序。
11. 自动化数据分析和统计。
12. 自动化生成图表和可视化。
13. 自动化生成幻灯片演示。
14. 自动化生成代码文档。
15. 自动化生成API文档。
16. 自动化生成数据库文档。
17. 自动化生成用户手册。
18. 自动化生成测试报告。
19. 自动化生成日志文件。
20. 自动化生成备份文件。
21. 自动化生成配置文件。
22. 自动化生成安装程序。
23. 自动化生成更新程序。
24. 自动化生成卸载程序。
25. 自动化生成打包程序。
26. 自动化生成部署脚本。
27. 自动化生成编译脚本。
28. 自动化生成发布脚本。
29. 自动化生成运维脚本。
30. 自动化生成监控脚本。
31. 自动化生成日常任务脚本。
32. 自动化生成定时任务脚本。
33. 自动化生成备份任务脚本。
34. 自动化生成数据迁移脚本。
35. 自动化生成数据库操作脚本。
36. 自动化生成文件操作脚本。
37. 自动化生成网络操作脚本。
38. 自动化生成系统操作脚本。
39. 自动化生成安全操作脚本。
40. 自动化生成性能测试脚本。
41. 自动化生成压力测试脚本。
42. 自动化生成功能测试脚本。
43. 自动化生成接口测试脚本。
44. 自动化生成UI测试脚本。
45. 自动化生成集成测试脚本。
46. 自动化生成回归测试脚本。
47. 自动化生成单元测试脚本。
48. 自动化生成代码质量检查脚本。
49. 自动化生成代码风格检查脚本。
宏程序编程

On the evening of July 24, 2021
宏程序应用
Courseware template
2、变量设置
变量名称
变量意义
#1
孔所在圆周半径 R
#2
均匀分布孔总个数 n
#3
第 i 个孔
第#4i 个 孔 的 孔 中 心 与 编 程 坐 标 X 轴 夹 角i
#10
第 i 个 孔 的 孔 中 心 X 坐 标 值xi
#11
第 i 个孔的孔中心 Y 坐标值 yi
#6
孔深度
#7
R 平面高度
On the evening of July 24, 2021
宏程序应用
Courseware template
3、宏程序
#1=50 #2=6 #3=1 #5=3.14159/180 #6=-20 #7=5 while#3LE#2 #4=360/#2*[#3-1]*#5 #10=#1*COS (#4) #11=#1* SIN (#4)
On the evening of July 24, 2021
Courseware template
2. 宏程序应用
例1
主程序:O0001 G40 G90 G92 X0 Y0 Z0 ; 确定坐标系;
N10 G65 P0002 A100 B120 C150 ;调用宏程序并赋初值;
N20 M30 ;
程序结束;
On the evening of July 24, 2021
四、分支和循环
Courseware template
在程序中可用GOTO语句和IF语句改变控制执行顺 序。
❖ 分支和循环操作共有三种类型:
宏程序编程.

用户宏程序虽然子程序对编制相同加工操作的程序非常有用,但用户宏程序由于允许使用变量、算术和逻辑运算及条件转移,使得编制相同加工操作的程序更方便,更容易。
可将相同加工操作编为通用程序,如型腔加工宏程序和固定加工循环宏程序。
使用时,加工程序可用一条简单指令调出用户宏程序,和调用子程序完全一样。
一、变量普通加工程序直接用数值指定G代码和移动距离;例如,G01和X100。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100;G01 X#1 F300;说明:1、变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号(#)和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]2、变量的类型变量根据变量号可以分成四种类型。
3、变量值的表示范围局部变量和公共变量可以有0值或下面范围中的值:-1047至-10-29或10-29到1047如果计算结果超出有效范围,则发出P/S报警No.111。
4、小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000;5、变量的引用为在程序中使用变量值,指定后跟变量号的地址。
当用表达式指定变量时,要把表达式放在括号中。
例如:G01X[#1+#2]F#3;被引用变量的值根据地址的最小设定单位自动地舍入。
例如:当G00X#1;以1/1000mm的单位执行时,CNC把12.3456赋值给变量#1,实际指令值为G00X12.346;改变引用变量的值的符号,要把负号(一)放在#的前面。
例如:GOOX-#1;当引用未定义的变量时,变量及地址字都被忽略。
例如:当变量#1的值是0,并且变量#2的值是空时,G00X#1 Y#2的执行结果为G00X0;。
6、未定义的变量当变量值未定义时,这样的变量成为“空”变量。
变量#0总是空变量。
宏程序编程代码
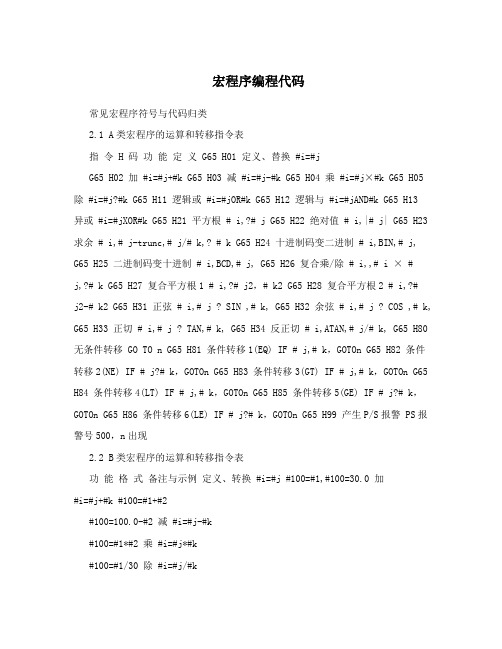
宏程序编程代码常见宏程序符号与代码归类2.1 A类宏程序的运算和转移指令表指令 H 码功能定义 G65 H01 定义、替换 #i=#jG65 H02 加 #i=#j+#k G65 H03 减 #i=#j-#k G65 H04 乘#i=#j×#k G65 H05 除 #i=#j?#k G65 H11 逻辑或 #i=#jOR#k G65 H12 逻辑与 #i=#jAND#k G65 H13异或 #i=#jXOR#k G65 H21 平方根 # i,?# j G65 H22 绝对值 # i,|# j| G65 H23 求余 # i,# j-trunc,# j/# k,? # k G65 H24 十进制码变二进制 # i,BIN,# j,G65 H25 二进制码变十进制 # i,BCD,# j, G65 H26 复合乘/除# i,,# i × # j,?# k G65 H27 复合平方根1 # i,?# j2,# k2 G65 H28 复合平方根2 # i,?#j2-# k2 G65 H31 正弦 # i,# j ? SIN ,# k, G65 H32 余弦 # i,# j ? COS ,# k, G65 H33 正切 # i,# j ? TAN,# k, G65 H34 反正切 # i,ATAN,# j/# k, G65 H80 无条件转移 GO TO n G65 H81 条件转移1(EQ) IF # j,# k,GOTOn G65 H82 条件转移2(NE) IF # j?# k,GOTOn G65 H83 条件转移3(GT) IF # j,# k,GOTOn G65 H84 条件转移4(LT) IF # j,# k,GOTOn G65 H85 条件转移5(GE) IF # j?# k,GOTOn G65 H86 条件转移6(LE) IF # j?# k,GOTOn G65 H99 产生P/S报警 PS报警号500,n出现2.2 B类宏程序的运算和转移指令表功能格式备注与示例定义、转换 #i=#j #100=#1,#100=30.0 加#i=#j+#k #100=#1+#2#100=100.0-#2 减 #i=#j-#k#100=#1*#2 乘 #i=#j*#k#100=#1/30 除 #i=#j/#k正弦 #i=SIN[#j] #100=SIN[#1]#100=COS[#36.3+#2] 反正弦 #i=ASIN[#j]#100=ATAN[#1]/[#2] 余弦 #i=COS[#j]反余弦 #i=ACOS[#j]正切 #i=TAN[#j]反正切 #i=ATAN[#j]/[#k]平方根 #i=SQRT[#j] #100=SQRT[#1*#1-100]#100=EXP[#1] 绝对值 #i=ABS[#j]舍入 #i=ROUND[#j]上取整 #i=FIX[#j]下取整 #i=FUP[#j]自然对数 #i=LN[#j]指数函数 #i=EXP[#j]或 #i=#j OR #k 逻辑运算一位一位地按二进制执行异或 #i=#j XOR #k与 #i=#j AND #kBCD转BIN BIN #i=BIN[#j] 用于与PMC的信号交换 BIN转BCD BCD #i=BCD[#j]数控车床加工中常用的B类宏程序分析3.1 双曲线程序曲线方程编程原点曲线方程原点#1#101 为方程中Z坐标(起点Z=72)#102 为方程中X坐标(起点半径X=3.5) #103 为工件坐标系中Z坐标,#103=#101-72.0 #104 为工件坐标系中 X坐标,#104=R2*2; 精加工程序如下: O001……G00 X9.0 Z2.0; 宏程序起点 #101=72.0;#102=3.5;N100 #103=#101-72.0; 跳转目标程序段 #104=#102*2;G01 X#104 Z#103;#101=#101-0.2; Z坐标每次增量为-0.2 mm#101=36/#101+3; 变量运算出X坐标 IF[#101GE2.0] GOTO100; 有条件跳转G28 U0 W0 M303.2正弦曲线程序正弦曲线#101 为正弦曲线角度变量#102 为正弦曲线各点X坐标#103 为正弦曲线各点Z坐标O0001……#101=90.0; 正弦曲线角度赋初值 #103=-20; 曲线Z坐标赋初值N100#102=34+6*SIN[#101] 变量X坐标值 G01X#102 Z#103 F0.15; 直线段拟合曲线 #101=#101-0.5 角度增量为-0.5度 #103=#103-0.05 Z坐标增量为-0.05mmIF[#101GE-630.0]GOTO100 条件判断M303.3 椭圆曲线程序椭圆方程椭圆中点#101 为椭圆长轴值#102 为椭圆短轴值#103 为椭圆Z坐标起点O001……#101=90;#102=48;#103=90;WHILE[#103GE0.0]DO1; 条件判断 #104=#102*SQRT[#101*#101-#103*#103]/#101; X函数值变量 G01 X[2*#104] Z#103;#103=#103-0.2; Z坐标增量-0.2mmEND1;……M303.4抛物线程序抛物线方程O001……#101=0 抛物线Z轴起始值-20*#101 ,;X函数值变量 N100#102=2*SQRT,G01 X[2*#2] Z#1;Z坐标增量-0.5mm #101=#101-0.5;IF,#1GE-10,GOTO100; 条件判断……M30数控加工宏程序实例在第三章中分析了在数控车床加工中常遇到的宏程序编程方式问题,在本章将进行实例对B类宏程序的两种不同的语句(IF GOTO和WHILE DO)进行说明.程序以FAUNC-Oi系统的格式编写4.1 IF语句实例1、程序计算说明: 2由抛物线方程Z=-X/10得X=10 ,故直线段起点X坐标值X=20。
新代宏程序编程一百例 (1)

新代宏程序编程一百例随着科技的不断进步,计算机编程也在不断发展。
新代宏程序编程作为一种新兴的编程方式,正在逐渐受到人们的关注和喜爱。
它以宏为基础,通过宏的扩展和替换,实现了更加灵活和高效的编程方式。
下面,我将为大家介绍一百个新代宏程序编程的例子。
1. 定义一个宏,实现两个数相加的功能。
2. 定义一个宏,实现两个数相减的功能。
3. 定义一个宏,实现两个数相乘的功能。
4. 定义一个宏,实现两个数相除的功能。
5. 定义一个宏,实现计算一个数的平方的功能。
6. 定义一个宏,实现计算一个数的立方的功能。
7. 定义一个宏,实现计算一个数的平方根的功能。
8. 定义一个宏,实现计算一个数的绝对值的功能。
9. 定义一个宏,实现计算一个数的倒数的功能。
10. 定义一个宏,实现计算一个数的阶乘的功能。
11. 定义一个宏,实现计算一个数的对数的功能。
12. 定义一个宏,实现计算一个数的指数的功能。
13. 定义一个宏,实现计算一个数的正弦的功能。
15. 定义一个宏,实现计算一个数的正切的功能。
16. 定义一个宏,实现计算一个数的反正弦的功能。
17. 定义一个宏,实现计算一个数的反余弦的功能。
18. 定义一个宏,实现计算一个数的反正切的功能。
19. 定义一个宏,实现计算一个数的双曲正弦的功能。
20. 定义一个宏,实现计算一个数的双曲余弦的功能。
21. 定义一个宏,实现计算一个数的双曲正切的功能。
22. 定义一个宏,实现计算一个数的反双曲正弦的功能。
23. 定义一个宏,实现计算一个数的反双曲余弦的功能。
24. 定义一个宏,实现计算一个数的反双曲正切的功能。
25. 定义一个宏,实现计算一个数的最大值的功能。
26. 定义一个宏,实现计算一个数的最小值的功能。
27. 定义一个宏,实现计算一个数的平均值的功能。
28. 定义一个宏,实现计算一个数的和的功能。
29. 定义一个宏,实现计算一个数的差的功能。
30. 定义一个宏,实现计算一个数的乘积的功能。
所有宏程序编程代码
所有宏程序编程代码各种类型宏程序A型宏程序G65H m宏指令表G65 H m 功能定义G65H m功能定义G65 H01 定义、置换#i=#jG65H28复合平方根2#i=√#j2-#k2G65 H02 加算#i=#j+#kG65H31正弦#i=#j×sin(#k)G65 H03 减算#i=#j-#kG65H32余弦#i=#j×cos(#k)G65 H04 乘算#i=#j×#kG65H33正切#i=#j×tan(#k)G65 H05 除算#i=#j÷#kG65H34反正切#i=arctan(#j/#k)G65逻#i=#j OR#k G65无GOTOnH11 辑加H80 条件转移G65 H12 逻辑乘#i=#j AND#kG65H81条件转移12F#j=#kGOTOnG65 H13 异或#i=#j XOR#kG65H82条件转移22F#j=#kGOTOnG65 H21 开平方#i=√#jG65H83条件转移32F#j=#kGOTOnG65 H22 绝对值#i=|#j|G65H84条件转2F#j=#kGOTOn移4G65 H23 剩余数#i=#j-tranc(#j/#k)×#kG65H85条件转移52F#j=#kGOTOnG65 H24 变成二进制#i=BIN(#j)G65H86条件转移62F#j=#kGOTOnG65 H25 变成十进制#i=BCD(#j)G65H99P/S报警报警号500+nG65 H26 复合除运算#i=(#i×#j)÷#kG65 H27 复合平方根1#i=√#j2+#k2宏程序的运算与控制指令(G65)指令格式:G65 Hm P#i Q#j R#k 条件转移的指令格式:G65HmPmQ#jR#k #i :储存运算结果的变量号Hm:条件转移指令#j :进行运算的变量号1,可以是常数 Pm:转移的地址#k :进行运算的变量号2,也可是常数 Q#j R#k:转移的条件B型宏程序(FANUC 0i Mate-MC系统)运算指令1、定义和转换#i=#j2、加法运算#i=#j+#k 和#i=#j-#k 差#i=#jOR#k 或(对32位的每一位)#i=#jXOR#k 异或(对32位的每一位)3、乘法运算#i=#j×#k 积#i=#j÷#k 商#i=#jAND#k 与(对32位的每一位)4、函数#i=SIN[#j] 正弦(度)#i=COS[#j] 余弦(度)#i=TAN[#j] 正切(度)#i=ATAN[#j]/[#k] 反正切(度)#i=SQRT[#j] 平方根#i=ABS[#j] 绝对值#i=BIN[#j] 十一二进制转换#i=BCD[#j] 二一十进制转换#i=ROUND[#j] 四舍五入圆整#i=FIX[#j] 舍去小数部分#i=FUP[#j] 小数部分进位到整数5、控制指令(1)无条件转移格式:GOTOn(2)条件转移格式:IF[(条件表达式)]GOTOn(条件表达式)有如下几种#jEQ#k 即#j=#k#jNE#k #j≠#k`#jGT#k #j>#k#jLT#k #j<#k#jGE#k #j≥#k#jLE#k #j≤#k例:IF[#4EQ#0]GOTO1N10G90```````````` WHILE[<条件表达式>]DOm `` ```` ```` ``IF[#ⅹEQ#ⅹ]GOTO1 ENDm (m=1、2、3…) (上、下对应,条件满足执行)编程中的一些辅助功能坐标旋转(G68、G69)指令G68 :旋转功能的建立G69 :旋转功能的取消指令的格式G17G18 G68X Y R [X、Y、Z(I、J、K)以G54定旋转中心的坐标,R为旋转角度]G19G17(G18或G19)平面的选择,在其上包括旋转的形状X Y :与G17、G18、G19相应的X、Y和Z中的两个轴的绝对指令,在G68后面指定旋转中心,当不指令时,则G68程序段的刀具位置被认为旋转中心。
数控铣宏程序编程100例

数控铣宏程序编程100例数控铣宏程序编程是数控铣床操作中的重要环节,它可以大大提高生产效率和产品质量。
下面将介绍100个常见的数控铣宏程序编程实例。
1. G90 G54 G0 X0 Y0:将坐标系设置为绝对坐标系,将刀具移动到原点位置。
2. G91 G0 X10 Y10:将坐标系设置为相对坐标系,将刀具移动到当前位置的X轴正方向10mm,Y轴正方向10mm的位置。
3. G92 X0 Y0:将当前位置设置为坐标系原点。
4. G94:将进给速度设置为每分钟进给。
5. G95:将进给速度设置为每转进给。
6. G96 S1000:将主轴转速设置为1000转/分钟。
7. G97:将主轴转速设置为每分钟转速。
8. G98:将主轴转速设置为每转转速。
9. G99:将主轴转速设置为每进给转速。
10. G40:取消刀具半径补偿。
11. G41 D1:启用刀具半径补偿,刀具半径为1mm。
12. G42 D2:启用刀具半径补偿,刀具半径为2mm。
13. G43 H1:启用刀具长度补偿,刀具长度为1mm。
14. G44 H2:启用刀具长度补偿,刀具长度为2mm。
15. G45 H3:启用刀具长度补偿,刀具长度为3mm。
16. G46 H4:启用刀具长度补偿,刀具长度为4mm。
17. G47 H5:启用刀具长度补偿,刀具长度为5mm。
18. G48:取消刀具长度补偿。
19. G49:取消刀具半径和长度补偿。
20. G50 S2000:将主轴转速设置为2000转/分钟。
21. G51:取消坐标系旋转。
22. G52 X10 Y10:将坐标系旋转10度。
23. G53:取消工件坐标系。
24. G54:将工件坐标系设置为1号坐标系。
25. G55:将工件坐标系设置为2号坐标系。
26. G56:将工件坐标系设置为3号坐标系。
27. G57:将工件坐标系设置为4号坐标系。
28. G58:将工件坐标系设置为5号坐标系。
29. G59:将工件坐标系设置为6号坐标系。
excel宏程序编程100例

excel宏程序编程100例Excel是一款功能强大的电子表格软件,它不仅可以进行数据的录入和计算,还可以通过宏程序实现自动化操作。
宏程序是一种自动化脚本,可以通过编程语言来实现对Excel的操作。
下面将介绍100个常用的Excel宏程序编程实例。
1. 创建一个新的工作表2. 删除一个工作表3. 复制一个工作表4. 移动一个工作表5. 隐藏一个工作表6. 显示一个工作表7. 设置工作表的名称8. 设置工作表的颜色9. 设置工作表的字体10. 设置工作表的边框11. 在指定位置插入一行12. 在指定位置插入一列13. 删除指定位置的行14. 删除指定位置的列15. 复制指定位置的行16. 复制指定位置的列17. 移动指定位置的行18. 移动指定位置的列19. 设置指定位置的单元格的值20. 设置指定位置的单元格的格式21. 设置指定位置的单元格的字体22. 设置指定位置的单元格的颜色23. 设置指定位置的单元格的边框24. 设置指定位置的单元格的公式25. 设置指定位置的单元格的链接26. 设置指定位置的单元格的数据验证27. 设置指定位置的单元格的条件格式28. 设置指定位置的单元格的批注29. 设置指定位置的单元格的合并30. 设置指定位置的单元格的拆分32. 设置指定位置的单元格的排序33. 设置指定位置的单元格的分组34. 设置指定位置的单元格的数据透视表35. 设置指定位置的单元格的图表36. 设置指定位置的单元格的条件格式37. 设置指定位置的单元格的数据透视表38. 设置指定位置的单元格的图表39. 设置指定位置的单元格的条件格式40. 设置指定位置的单元格的数据透视表41. 设置指定位置的单元格的图表42. 设置指定位置的单元格的条件格式43. 设置指定位置的单元格的数据透视表44. 设置指定位置的单元格的图表45. 设置指定位置的单元格的条件格式46. 设置指定位置的单元格的数据透视表47. 设置指定位置的单元格的图表49. 设置指定位置的单元格的数据透视表50. 设置指定位置的单元格的图表51. 设置指定位置的单元格的条件格式52. 设置指定位置的单元格的数据透视表53. 设置指定位置的单元格的图表54. 设置指定位置的单元格的条件格式55. 设置指定位置的单元格的数据透视表56. 设置指定位置的单元格的图表57. 设置指定位置的单元格的条件格式58. 设置指定位置的单元格的数据透视表59. 设置指定位置的单元格的图表60. 设置指定位置的单元格的条件格式61. 设置指定位置的单元格的数据透视表62. 设置指定位置的单元格的图表63. 设置指定位置的单元格的条件格式64. 设置指定位置的单元格的数据透视表65. 设置指定位置的单元格的图表66. 设置指定位置的单元格的条件格式67. 设置指定位置的单元格的数据透视表68. 设置指定位置的单元格的图表69. 设置指定位置的单元格的条件格式70. 设置指定位置的单元格的数据透视表71. 设置指定位置的单元格的图表72. 设置指定位置的单元格的条件格式73. 设置指定位置的单元格的数据透视表74. 设置指定位置的单元格的图表75. 设置指定位置的单元格的条件格式76. 设置指定位置的单元格的数据透视表77. 设置指定位置的单元格的图表78. 设置指定位置的单元格的条件格式79. 设置指定位置的单元格的数据透视表80. 设置指定位置的单元格的图表81. 设置指定位置的单元格的条件格式82. 设置指定位置的单元格的数据透视表83. 设置指定位置的单元格的图表84. 设置指定位置的单元格的条件格式85. 设置指定位置的单元格的数据透视表86. 设置指定位置的单元格的图表87. 设置指定位置的单元格的条件格式88. 设置指定位置的单元格的数据透视表89. 设置指定位置的单元格的图表90. 设置指定位置的单元格的条件格式91. 设置指定位置的单元格的数据透视表92. 设置指定位置的单元格的图表93. 设置指定位置的单元格的条件格式94. 设置指定位置的单元格的数据透视表95. 设置指定位置的单元格的图表96. 设置指定位置的单元格的条件格式97. 设置指定位置的单元格的数据透视表98. 设置指定位置的单元格的图表99. 设置指定位置的单元格的条件格式100. 设置指定位置的单元格的数据透视表以上是100个常用的Excel宏程序编程实例,通过这些实例,我们可以更好地掌握Excel宏程序的编程技巧,提高工作效率。
宏程序代码
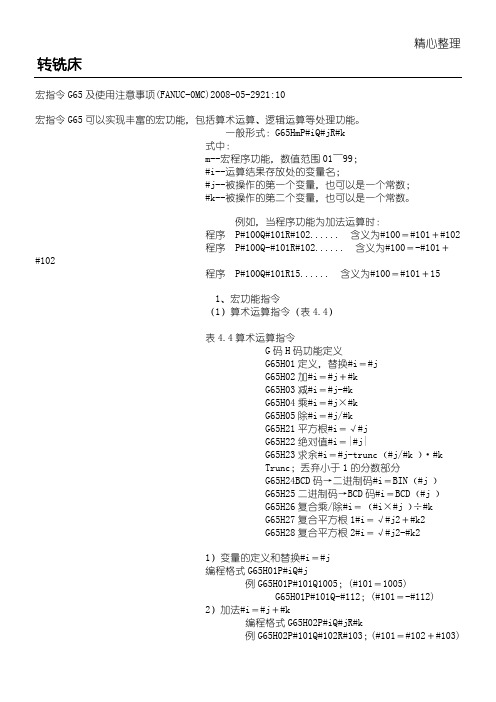
精心整理转铣床宏指令G65及使用注意事项(FANUC-0MC)2008-05-2921:10宏指令G65可以实现丰富的宏功能,包括算术运算、逻辑运算等处理功能。
一般形式:G65HmP#iQ#jR#k式中:m--宏程序功能,数值范围01~99;#i--#j--#k--程序#101+#102-#101+#102含义为#100=#101+154.4)表4.4算术运算指令G码H码功能定义G65H01定义,替换#i=#jG65H02加#i=#j+#kG65H03减#i=#j-#kG65H04乘#i=#j×#kG65H05除#i=#j/#kG65H21平方根#i=√#jG65H22绝对值#i=|#j|G65H23求余#i=#j-trunc﹙#j/#k﹚·#kTrunc;丢弃小于1的分数部分G65H24BCD码→二进制码#i=BIN﹙#j﹚G65H25二进制码→BCD码#i=BCD﹙#j﹚÷#k#k21编程格式=#j+#k编程格式G65H02P#iQ#jR#k例G65H02P#101Q#102R#103;(#101=#102+#103) 3)减法#i=#j-#k编程格式G65H03P#iQ#jR#k例G65H03P#101Q#102R#103;(#101=#102-#103) 4)乘法#i=#j×#k编程格式G65H04P#iQ#jR#k例G65H04P#101Q#102R#103;(#101=#102×#103) 5)除法#i=#j/#k编程格式G65H05P#iQ#jR#k例G65H05P#101Q#102R#103;(#101=#102/#103)6)平方根#i=编程格式G65H21P#iQ#j例G65H21P#101Q#102;(#101=)7)绝对值#i=│#j│编程格式G65H22P#iQ#j例G65H22P#101Q#102;(#101=│#102│) 89G码H码功能定义G65H11逻辑“或”#i=#j·OR·#kG65H12逻辑“与”#i=#j·AND·#kG65H13异或#i=#j·XOR·#k1)逻辑或#i=#jOR#k编程格式G65H11P#iQ#jR#k例G65H11P#101Q#102R#103;(#101=#102OR#103) 2)逻辑与#i=#jAND#k编程格式G65H12P#iQ#jR#k例G65H12P#101Q#102R#103;(#101=#102AND#103) (3)三角函数指令(表4.6)表4.6三角函数指令G码H码功能定义G65H31正弦#i=#j·SIN﹙#k﹚G65H32余弦#i=#j·COS﹙#k﹚G65H33正切#i=#j·TAN﹙#k﹚G65H34反正切#i=ATAN﹙#j/#k﹚1编程格式例2#102×COS(#103))#i=#j×TAN#k编程格式G65H33P#iQ#jR#k(单位:度)例G65H33P#101Q#102R#103;(#101=4)反正切#i=ATAN(#j/#k)编程格式G65H34P#iQ#jR#k(单位:度,0o≤#j≤360o)例G65H34P#101Q#102R#103;(#101=ATAN(#102/#103))(4)控制类指令(表4.7)表4.7控制类指令G码H码功能定义G65H80无条件转移GOTOnG65H81条件转移1IF#j=#k,GOTOnG65H82条件转移2IF#j≠#k,GOTOnG65H83条件转移3IF#j>#k,GOTOnG65H84条件转移4IF#j<#k,GOTOnG65H85条件转移5IF#j≥#k,GOTOnG65H86条件转移6IF#j≤#k,GOTOn+n出现1编程格式2)#102,转移到N1000程序段;若#101≠#102,执行下一程序段。
宏程序编程
#3001,#3002
宏语句读入缓冲后读写入数据
读
#3011,#3012
宏语句读入缓冲后读入数据
自动运行控制
伺服位置误差
第1位代表轴号(1~3);
变量#5081~#5083存储的刀具长度补偿值是当前的执行值,不是后面程序的处理值;
在G31(跳转功能)程序段中跳转信号接通时的刀具位置储存在变量#5061到#5064中。当G31程序段中的跳转信号未接通时,这些变量中储存指定程序段的终点值。
移动期间不能读是指由于缓冲(预读)功能的原因,不能读取期望值。
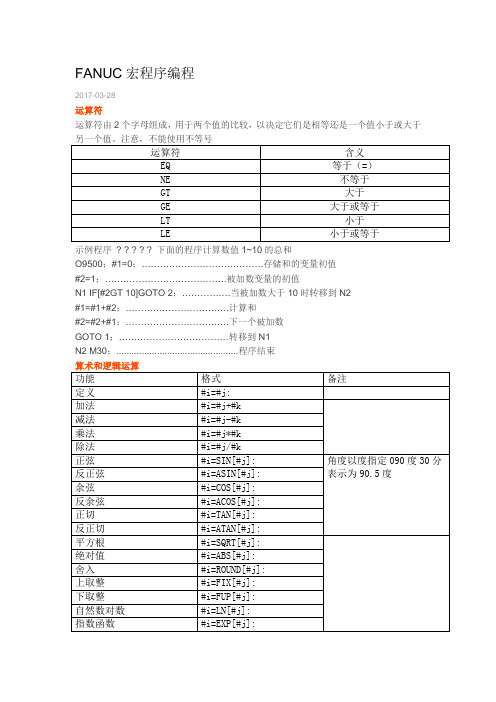
FANUC宏程序编程
2017-03-28
运算符
运算符由2个字母组成,用于两个值的比较,以决定它们是相等还是一个值小于或大于另一个值。注意,不能使用不等号
E
不等于
GT
大于
GE
大于或等于
LT
小于
LE
小于或等于
示例程序? ? ? ? ?下面的程序计算数值1~10的总和
O9500;#1=0;………………………………….存储和的变量初值
●常数可替代变量#j。
上取整下取整:
CNC处理数值运算时,若操作后产生整数绝对值大于原数的绝对值时为上取整;小于为下取整。例如:
假设#1=1.2,#2=-1.2。当执行#3=FUP[#1]时,2.0赋给#3;当执行#3=FIX[#1]时1.0赋给#3;当执行#3=FUP[#2]时,-2.0赋给#3;当执行#3=FIX[#2]时,-1.0赋给#3。
#9
R
#18
Y
#25
H
#11
S
#19
Z
#26
地址G,L,N,O和P不能在自变量中使用
不需要指定的地址可以省,对于省的地址的局部变量为空
CNC数字编程宏程式代码大全

CNC数字编程宏程式代码大全G代码分组功能*G00 01 定位(快速移动)*G01 01 直线插补(进给速度)G02 01 顺时针圆弧插补G03 01 逆时针圆弧插补G04 00 暂停,精确停止G09 00 精确停止*G17 02 选择X Y平面G18 02 选择Z X平面G19 02 选择Y Z平面G27 00 返回并检查参考点G28 00 返回参考点G29 00 从参考点返回G30 00 返回第二参考点*G40 07 取消刀具半径补偿G41 07 左侧刀具半径补偿G42 07 右侧刀具半径补偿G43 08 刀具长度补偿+G44 08 刀具长度补偿-*G49 08 取消刀具长度补偿G52 00 设置局部坐标系G53 00 选择机床坐标系*G54 14 选用1号工件坐标系G55 14 选用2号工件坐标系G56 14 选用3号工件坐标系G57 14 选用4号工件坐标系G58 14 选用5号工件坐标系G59 14 选用6号工件坐标系G60 00 单一方向定位G61 15 精确停止方式*G64 15 切削方式G65 00 宏程序调用G66 12 模态宏程序调用*G67 12 模态宏程序调用取消G73 09 深孔钻削固定循环G74 09 反螺纹攻丝固定循环G76 09 精镗固定循环*G80 09 取消固定循环G81 09 钻削固定循环G82 09 钻削固定循环G83 09 深孔钻削固定循环G84 09 攻丝固定循环G85 09 镗削固定循环G86 09 镗削固定循环G87 09 反镗固定循环G88 09 镗削固定循环G89 09 镗削固定循环*G90 03 绝对值指令方式*G91 03 增量值指令方式G92 00 工件零点设定*G98 10 固定循环返回初始点G99 10 固定循环返回R点G代码被分为了不同的组,这是由于大多数的G代码是模态的,所谓模态G代码,是指这些G代码不只在当前的程序段中起作用,而且在以后的程序段中一直起作用,直到程序中出现另一个同组的G代码为止,同组的模态G代码控制同一个目标但起不同的作用,它们之间是不相容的。
宏程序编程代码
宏程序编程代码常见宏程序符号与代码归类2.1 A类宏程序的运算和转移指令表指令 H 码功能定义 G65 H01 定义、替换 #i=#jG65 H02 加 #i=#j+#k G65 H03 减 #i=#j-#k G65 H04 乘#i=#j×#k G65 H05 除 #i=#j?#k G65 H11 逻辑或 #i=#jOR#k G65 H12 逻辑与 #i=#jAND#k G65 H13异或 #i=#jXOR#k G65 H21 平方根 # i,?# j G65 H22 绝对值 # i,|# j| G65 H23 求余 # i,# j-trunc,# j/# k,? # k G65 H24 十进制码变二进制 # i,BIN,# j,G65 H25 二进制码变十进制 # i,BCD,# j, G65 H26 复合乘/除# i,,# i × # j,?# k G65 H27 复合平方根1 # i,?# j2,# k2 G65 H28 复合平方根2 # i,?#j2-# k2 G65 H31 正弦 # i,# j ? SIN ,# k, G65 H32 余弦 # i,# j ? COS ,# k, G65 H33 正切 # i,# j ? TAN,# k, G65 H34 反正切 # i,ATAN,# j/# k, G65 H80 无条件转移 GO TO n G65 H81 条件转移1(EQ) IF # j,# k,GOTOn G65 H82 条件转移2(NE) IF # j?# k,GOTOn G65 H83 条件转移3(GT) IF # j,# k,GOTOn G65 H84 条件转移4(LT) IF # j,# k,GOTOn G65 H85 条件转移5(GE) IF # j?# k,GOTOn G65 H86 条件转移6(LE) IF # j?# k,GOTOn G65 H99 产生P/S报警 PS报警号500,n出现2.2 B类宏程序的运算和转移指令表功能格式备注与示例定义、转换 #i=#j #100=#1,#100=30.0 加#i=#j+#k #100=#1+#2#100=100.0-#2 减 #i=#j-#k#100=#1*#2 乘 #i=#j*#k#100=#1/30 除 #i=#j/#k正弦 #i=SIN[#j] #100=SIN[#1]#100=COS[#36.3+#2] 反正弦 #i=ASIN[#j]#100=ATAN[#1]/[#2] 余弦 #i=COS[#j]反余弦 #i=ACOS[#j]正切 #i=TAN[#j]反正切 #i=ATAN[#j]/[#k]平方根 #i=SQRT[#j] #100=SQRT[#1*#1-100]#100=EXP[#1] 绝对值 #i=ABS[#j]舍入 #i=ROUND[#j]上取整 #i=FIX[#j]下取整 #i=FUP[#j]自然对数 #i=LN[#j]指数函数 #i=EXP[#j]或 #i=#j OR #k 逻辑运算一位一位地按二进制执行异或 #i=#j XOR #k与 #i=#j AND #kBCD转BIN BIN #i=BIN[#j] 用于与PMC的信号交换 BIN转BCD BCD #i=BCD[#j]数控车床加工中常用的B类宏程序分析3.1 双曲线程序曲线方程编程原点曲线方程原点#1#101 为方程中Z坐标(起点Z=72)#102 为方程中X坐标(起点半径X=3.5) #103 为工件坐标系中Z坐标,#103=#101-72.0 #104 为工件坐标系中 X坐标,#104=R2*2; 精加工程序如下: O001……G00 X9.0 Z2.0; 宏程序起点 #101=72.0;#102=3.5;N100 #103=#101-72.0; 跳转目标程序段 #104=#102*2;G01 X#104 Z#103;#101=#101-0.2; Z坐标每次增量为-0.2 mm#101=36/#101+3; 变量运算出X坐标 IF[#101GE2.0] GOTO100; 有条件跳转G28 U0 W0 M303.2正弦曲线程序正弦曲线#101 为正弦曲线角度变量#102 为正弦曲线各点X坐标#103 为正弦曲线各点Z坐标O0001……#101=90.0; 正弦曲线角度赋初值 #103=-20; 曲线Z坐标赋初值N100#102=34+6*SIN[#101] 变量X坐标值 G01X#102 Z#103 F0.15; 直线段拟合曲线 #101=#101-0.5 角度增量为-0.5度 #103=#103-0.05 Z坐标增量为-0.05mmIF[#101GE-630.0]GOTO100 条件判断M303.3 椭圆曲线程序椭圆方程椭圆中点#101 为椭圆长轴值#102 为椭圆短轴值#103 为椭圆Z坐标起点O001……#101=90;#102=48;#103=90;WHILE[#103GE0.0]DO1; 条件判断 #104=#102*SQRT[#101*#101-#103*#103]/#101; X函数值变量 G01 X[2*#104] Z#103;#103=#103-0.2; Z坐标增量-0.2mmEND1;……M303.4抛物线程序抛物线方程O001……#101=0 抛物线Z轴起始值-20*#101 ,;X函数值变量 N100#102=2*SQRT,G01 X[2*#2] Z#1;Z坐标增量-0.5mm #101=#101-0.5;IF,#1GE-10,GOTO100; 条件判断……M30数控加工宏程序实例在第三章中分析了在数控车床加工中常遇到的宏程序编程方式问题,在本章将进行实例对B类宏程序的两种不同的语句(IF GOTO和WHILE DO)进行说明.程序以FAUNC-Oi系统的格式编写4.1 IF语句实例1、程序计算说明: 2由抛物线方程Z=-X/10得X=10 ,故直线段起点X坐标值X=20。
FANUC系统宏程序编程

本系统宏程序体系采用FANUC系统宏程序B方式实现一变量普通加工程序直接用数值指定G代码和移动距离;例如,GO1和X100.0。
使用用户宏程序时,数值可以直接指定或用变量指定。
当用变量时,变量值可用程序或用MDI面板上的操作改变。
#1=#2+100G01 X#1 F300说明:变量的表示计算机允许使用变量名,用户宏程序不行。
变量用变量符号(#)和后面的变量号指定。
例如:#1表达式可以用于指定变量号。
此时,表达式必须封闭在括号中。
例如:#[#1+#2-12]变量的类型变量根据变量号可以分成四种类型#0-#49 局部变量局部变量只能用在宏程序中存储数据,例如,运算结果.当断电时,局部变量被初始化为0.调用宏程序时,自变量对局部变量赋值,#50-#499 公共变量公共变量在不同的宏程序中的意义相同.当断电时, 公共变量初始化为0.目前版本中,某些公众变量被赋予特殊意义(系统变量),用于描述CNC运行时各种数据的变化,这些变量包括:#449用于指明固定循环退刀模式(G98,G99), 如在G99方式下,#449变量为1;如在G98方式下,#449变量为-1.#450用于指明当前程序段处于绝对坐标编程模式(G90)还是相对坐标编程模式(G91).如在G90方式下,#450变量为1;如在G91方式下,#450变量为-1.#451,#452,#453,#454用于存储刀具当前位置(X,Y,Z,A轴)在后期的版本中,将会安排专门的空间作为系统变量区.变量值的范围局部变量和公共变量在系统内采用浮点数方式存储小数点的省略当在程序中定义变量值时,小数点可以省略。
例:当定义#1=123;变量#1的实际值是123.000。
变量的引用为在程序中使用变量值,指定后跟变量号的地址。
例如:G01X#1+#2F#3或者G01X[#1+#2]F#3限制程序号,顺序号和任选程序段跳转号不能使用变量。
例:下面情况不能使用变量:0#1;/#2G00X100.0;N#3Y200.0;二算术运算和逻辑运算置换#I=#j算术运算加:#I=#j+#k,减:#I=#j-#k,乘:#I=#j*#k,除:#I=#j/#k。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
各种类型宏程序A型宏程序G65H m宏指令表宏程序的运算与控制指令(G65)指令格式:G65 Hm P#i Q#j R#k 条件转移的指令格式:G65HmPmQ#jR#k#i :储存运算结果的变量号 Hm:条件转移指令#j :进行运算的变量号1,可以是常数 Pm:转移的地址#k :进行运算的变量号2,也可是常数 Q#j R#k:转移的条件B型宏程序(FANUC 0i Mate-MC系统)运算指令1、定义和转换#i=#j2、加法运算#i=#j+#k 和#i=#j-#k 差#i=#jOR#k 或(对32位的每一位)#i=#jXOR#k 异或(对32位的每一位)3、乘法运算#i=#j×#k 积#i=#j÷#k 商#i=#jAND#k 与(对32位的每一位)4、函数#i=SIN[#j] 正弦(度)#i=COS[#j] 余弦(度)#i=TAN[#j] 正切(度)#i=ATAN[#j]/[#k] 反正切(度)#i=SQRT[#j] 平方根#i=ABS[#j] 绝对值#i=BIN[#j] 十一二进制转换#i=BCD[#j] 二一十进制转换#i=ROUND[#j] 四舍五入圆整#i=FIX[#j] 舍去小数部分#i=FUP[#j] 小数部分进位到整数5、控制指令(1)无条件转移格式:GOTOn(2)条件转移格式:IF[(条件表达式)]GOTOn(条件表达式)有如下几种#jEQ#k 即#j=#k#jNE#k #j≠#k`#jGT#k #j>#k#jLT#k #j<#k#jGE#k #j≥#k#jLE#k #j≤#k例:IF[#4EQ#0]GOTO1N10G90```````````` WHILE[<条件表达式>]DOm`` ```` ```` ``IF[#ⅹEQ#ⅹ]GOTO1 ENDm (m=1、2、3…)(上、下对应,条件满足执行)编程中的一些辅助功能坐标旋转(G68、G69)指令G68 :旋转功能的建立G69 :旋转功能的取消指令的格式G17G18 G68X Y R [X、Y、Z(I、J、K)以G54定旋转中心的坐标,R为旋转角度]G19G17(G18或G19)平面的选择,在其上包括旋转的形状X Y :与G17、G18、G19相应的X、Y和Z中的两个轴的绝对指令,在G68后面指定旋转中心,当不指令时,则G68程序段的刀具位置被认为旋转中心。
R :角度位移正值表示逆时针旋转,回转角度根据指定的G代码(G90或G91)确定绝对值还是增量值。
刀具补偿:要坐标旋转之后,才执行所有的补偿操作上受参考点有关的G27、G28、G29、G30等,与坐标有关的G52到G59、G92等限制,不能指定,如果需要,先取消旋转方式以后才能指令比例缩放(G50、G51)指令(G50取消G51)指令格式:(1)沿所有轴以相同的比例放大或缩小格式:指令意义:G51X Y Z P :缩放开始X Y Z :比例缩放中心坐标值的绝对值`` 缩放有效`` (缩放方式)P :缩放比例G50 缩放取消(2)沿各轴以不同的比例放大或缩小格式:指令意义:G51X Y Z I J K(缩放开始,其后相同)X Y Z :同上I J K :X、Y和Z各轴对应的缩放比例注:须在单独的程序段内指定G51,在完成放大或缩放之后,指定G50以取消缩放方式另:[G5.1Q1(G51刀路优化的建立)Q0(取消G5.1)注:它可以以开始程序段或其后单独程序段建立A、(螺旋加工孔)OxxxxG65H01P#100Q0.;(Z轴的初始值)G65H01P#101Q20.;(孔的半径)G65H01P#102Q10.;(加工孔的高度)G65H01P#103Q1.;(Z轴每次的增量)G90G54G00G40X20.Y20.Z100.;(以绝对坐标值定位到孔的中心)M03S2000;Z0;G91G41G01X#101Y0D01F1000;(以增量值建立刀补)N10G65H02P#100Q#100R#103;G90G03Z-#100I-#101F1200;G65H84P10Q#100R#102;G03I-#101F600;G00Z20;G40;M05;M30;B、(螺旋加工孔)Oxxxx#1=0;#2=20;#3=10;#4=1;G90G54G00X20Y20Z100;M03S2000;Z0;G91G41G01X#2Y0D01F1000;WHILE[#1LT#3]DO1;#1=#1+#4;G90G03Z-#1I-#2F1000;END1;G03I-#2F800;G00Z100;G40;M05;M30;(意义与上相同)B、[孔加工(绝对值)]Oxxxx#1=20;(孔的半径)#2=8;(圆弧进刀半径)#3=#1-#2;(圆弧进刀的起点值)#4=10;(加工孔的高度)#5=2;(每次高度的增量)#6=0;(Z轴的初始值)G90G54G40G00X0Y0Z100;(定位到孔的中心)M03S2000;WHILE[#6LT#4]DO1;#6=#6+#5;Z-#6;G01G41X#3Y-#2D01F1000;G03X#1Y0R#2;I-#1;X#3Y#2R#2;G40G01X0Y0;END1;G00Z100;M05;M30;(以上适合孔在工件坐标中心位置的孔加工)B、[孔加工(增量值)]G90G54G40G00X0Y0Z100;(可定位到任何坐标位置的孔中心)G01G41X#3Y-#2D01F1000;换成:G91G01G41X#3Y-#2D01F1000;G03X#1Y0R#2;换成:G03X#2Y#2R#2;```````` (与上相同)````X#3Y#2R#2;换成:X-#2Y#2R#2;G40G01X0Y0;换成:用绝对坐标值(G90)回到开始定位点(改后可用在工件坐标中的任何位置孔的加工)A、(外形加工)OxxxxG65H01P#100Q24;G65H01P#101Q6;G65H01P#102Q0;G90G54G40G00X70Y-60Z100;M03S2000;N10G65H02P#102Q#102R#101;Z-#102;G41G01X60Y-40D01F1000;X-60;Y40;X60;Y-45;G40X70Y-60;G65H84P10Q#102R#100;G00Z100;M05;M30;B、(外形加工)Oxxxx#1=24;#2=6;#3=0;G90G40G54G00X70Y-60Z100;M03S2000;WHILE[#3LT#1]DO1;#3=#3+#2;Z-#3;G41G01X60Y-40D01F1000;X-60;Y40;X60;Y-45;G40X70Y-60;END1;G00Z100;M05;M30;B、平面加工Oxxxx#1=5;(高度)#2=1;(增量高度)#3=0;(初始值)#4=60;(平面长度的一半)G90G54G00X70Y-50Z100;M03S2000;WHILE[#3LT#1]DO1;#3=#3+#2;Z-#3;#5=70;(平面长度的一半)WHILE[#5GT-#4]DO2;#5=#5-13;G01X#5F1000;Y50;#5=#5-13;X#5;Y-50;END2;G00Z20;(加工完一层提刀)X70Y-50;(回到初始点)END1;Z100;M05;M30;以上均为用平刀编程的程序,而在曲面加工里面,会用到球刀,球刀与平刀的编程有所不同,在手工编程里面,用球刀来编程,只能是以球心来计算,而平刀却是用刀尖。
所以在用球刀编程加工曲面时,可以加上其R半径去计算,而平刀是以刀尖来计算,在编程时可以利用平移轨迹法,即将每一个刀位点平移出一个刀的半径。
(上为一些规则球面,椭圆面,倒圆角等)而在用球刀加工一些斜面时,刀具的起点与终点必须要经过计算,原因下图:B、椭圆半球(平刀)Oxxxx#1=30;(椭圆的长半轴)#2=20;(椭圆的短半轴)#3=5;(平刀半径)#4=90;(起始角度)#5=2;(增量角度)G90G54G00G5.1Q1X0Y0Z100;M03S2000;Z0;WHILE[#4GT0]DO1;#4=#4-#5;#6=#1*COS[#4]+#3;(将轨迹平移)#7=#2*SIN[#4]-#2;[Z轴从最高点(零点)向下变化]#8=#2*COS[#4]+#3;(将轨迹平移)#9=0;WHILE[#9LT360]DO2;#9=#9+2;#10=#6*COS[#9];#11=#8*SIN[#9];G01X#10Y#11F1200;END2;END1;G00Z100;Q0M05;M30;B、球面(平刀)赋值时,把椭圆的长,短轴换成圆的半径如:#1=20 前面如上WHILE[#4GT0]DO1;#4=#4-#5;#6=#1*COS[#4]+#3;(将轨迹平移)#7=#1*SIN[#4]-#1;[Z轴从最高点(零点)向下变化]G90G01X#6F1000;Z#7;I-#6;下面END2删掉B、椭圆面(球刀)Oxxxx#1=30+5;(椭圆长半轴+刀半径R)#2=20+5;(椭圆短半轴+刀半径R)#3=90;#4=2;G90G54G5.1Q1G00X0Y0Z100;M03S2000;Z0;WHILE[#3GT0]DO1;#3=#3-#4;#5=#1*COS[#3];#6=#2*COS[#3];#7=#2*SIN[#3]-#2;G90G01X#5F1000;Z#7;#8=0;WHILE[#8LT360]DO2;#8=#8+2;#9=#6*SIN[#8];#10=#5*COS[#8];G01X#10Y#9F1200;END2;END1;G00Z100;Q0;M05;M30;球面与上平刀一样B、圆锥面(球刀)Oxxxx。