第4章习题参考解答讲解
(完整版)第4章应变式传感器习题及解答

第4章应变式传感器一、单项选择题1、为减小或消除非线性误差的方法可采用()。
A. 提高供电电压B. 提高桥臂比C. 提高桥臂电阻值D. 提高电压灵敏度2、全桥差动电路的电压灵敏度是单臂工作时的()。
A. 不变B. 2倍C. 4倍D. 6倍3、电阻应变片配用的测量电路中,为了克服分布电容的影响,多采用( )。
A.直流平衡电桥 B.直流不平衡电桥C.交流平衡电桥 D.交流不平衡电桥4、通常用应变式传感器测量( )。
A. 温度 B.密度C.加速度 D.电阻5、影响金属导电材料应变灵敏系数K的主要因素是()。
A.导电材料电阻率的变化 B.导电材料几何尺寸的变化C.导电材料物理性质的变化 D.导电材料化学性质的变化6、产生应变片温度误差的主要原因有()。
A.电阻丝有温度系数 B.试件与电阻丝的线膨胀系数相同C.电阻丝承受应力方向不同 D.电阻丝与试件材料不同7、电阻应变片的线路温度补偿方法有()。
A.差动电桥补偿法 B.补偿块粘贴补偿应变片电桥补偿法C.补偿线圈补偿法 D.恒流源温度补偿电路法8、当应变片的主轴线方向与试件轴线方向一致,且试件轴线上受一维应力作用时,应变片灵敏系数K的定义是()。
A.应变片电阻变化率与试件主应力之比B.应变片电阻与试件主应力方向的应变之比C.应变片电阻变化率与试件主应力方向的应变之比D.应变片电阻变化率与试件作用力之比9、制作应变片敏感栅的材料中,用的最多的金属材料是()。
A.铜 B.铂 C.康铜 D.镍铬合金10、利用相邻双臂桥检测的应变式传感器,为使其灵敏度高、非线性误差小()。
A.两个桥臂都应当用大电阻值工作应变片B.两个桥臂都应当用两个工作应变片串联C.两个桥臂应当分别用应变量变化相反的工作应变片D.两个桥臂应当分别用应变量变化相同的工作应变片11、在金属箔式应变片单臂单桥测力实验中不需要的实验设备是()。
A.直流稳压电源 B.低通滤波器C.差动放大器 D.电压表12、关于电阻应变片,下列说法中正确的是()A.应变片的轴向应变小于径向应变B.金属电阻应变片以压阻效应为主C.半导体应变片以应变效应为主D.金属应变片的灵敏度主要取决于受力后材料几何尺寸的变化13、金属丝的电阻随着它所受的机械变形(拉伸或压缩)的大小而发生相应的变化的现象称为金属的()。
第4章 习题及参考解答
(2)用跳转表实现。
MOV BL,NUMB
MOV CHARS[BX],'$'
MOV DX,OFFSET CHARS
MOV AH,9
INT21H
MOV AH,4CH
INT21H
CODEENDS
ENDSTART
13.某软件共可接收10个键盘命令(分别为A,B,C,…,J),完成这10个命令的程序分别为过程P0,P1,…,P9。编一程序从键盘接收命令,并转到相应的过程去执行。要求用两种方法:
(5)MOV[BX],1000错。两操作数类型不匹配,[BX]只定义了一字节单元,而1000是16位数据。
11.8086汇编语言程序中段的类型有几种?各段如何定义?段定义语句中,定位类型、组合类型、类别各起什么作用?各有什么含义?
解8086汇编语言中,段的类型有三种,即代码段、堆栈段、数据段(附加数据段可归属于数据段)。各段可用段定义语句(SEGMENT与ENDS)和段名赋给段寄存器语句(ASSUME)来定义。段定义语句中,定位类型表示此段的起始边界要求,可允许4种段的起始边界,即PAGE、PARA、WORD或BYTE。它们分别表示段的起始值为以页、节、字、字节为边界,若此项省略,则默认值为PARA。组合类型用来告诉连接程序本段与其他段的关系,分别为NONE、PUBLIC、COMMON、AT表达式、STACK或MEMORY。每一种的含义请参看主教材。类别是连接程序(LINK)需要的。它可以是任何合法的名称,必须用单引号括起来,连接程序只使同类别的段发生关联。典型类别如‘CODE’、'STACK'。
DATASEGMENT
ORG 100H
BUF1DB 00H,01H.02H,…,0FEH,0FFH;共256个数据
第4章练习题参考答案
第4章练习题参考答案第4章练习题参考答案第四章练习题参考答案【4-1】已知某轴心受拉杆的截面尺寸300400b h mm mm=?,配有820φ钢筋,混凝土和钢筋的材料指标为:22.0/tf N mm =,42.110cE =?2/N mm ,2270/yfN mm =,522.110/s E N mm =?。
试问此构件开裂时和破坏时的轴向拉力分别为多少?【解】配820φ钢筋,查混凝土结构设计规范(GB50010-2010)附录A ,表A.0.1得22513sA mm =。
25132.09%3.0%300400s A bh ρ===300400120000A bh mm ==?=,542.110102.110s E c E E α?===?(1)由式(4-5),开裂荷载为 0(1)(1)tcrcEt tEN E A f A αρεαρ=+=+2.0120000(1100.0209)=??+?290160N= 209.16kN =(2)由式(4-7),构件的抗拉极限承载力为2702513678510678.51tuysN f A N kN ==?==【4-2】已知某钢筋混凝土轴心受拉构件,截面尺寸为200300b h mm mm ?=?,构件的长度2000l mm =,混凝土抗拉强度22.95/tfN mm =,弹性模量422.5510/cEN mm =?,纵向钢筋的截面积2615sAmm =,屈服强度2270/yfN mm =,弹性模量522.110/sEN mm =?,求(1)若构件伸长0.2mm ,外荷载是多少?混凝土和钢筋各承担多少外力?(2)若构件伸长0.5mm ,外荷载是多少?混凝土和钢筋各承担多少外力?(3)构件开裂荷载是多少?即将开裂时构件的变形是多少?(4)构件的极限承载力是多少?【解】615 1.025% 3.0%200300s A bh ρ===220030060000A bh mm ==?=542.1108.2352.5510s E c E E α?===?,442.95 1.157102.5510t t c f E ε-===??(1)○1由0.2l mm ?=可知,构件的应变为 440.2 1.010 1.157102000t l l εε--?===?<=? 构件未开裂,处于弹性工作状态,csεεε==,构件所受的拉力为44(1) 2.551060000(18.235 1.025%) 1.010t c E N E A αρε-=+=+3165.9110N=?165.91kN=○2此时混凝土承担的外力 4432.5510 1.010********.010153.0ts c N E A N kNε-===?=○3钢筋承担的外力165.91153.012.91ts t tc N N N kN=-=-=(2)○1由0.5l mm ?=可知,构件的应变为4400.52.510 1.157102000t l l εε--?===?>=?,且35270 1.286102.110y y sf E εε-<===??构件开裂,钢筋未屈服,sεε=,构件所受的拉力为542.110 2.51061532287.532.29t s s N E A N kNε-====○2此时,混凝土开裂,在开裂处混凝土应力0c σ= ○3钢筋的应力5422.110 2.51052.5/s s E N mm σε-=== (3)○1开裂荷载为 0(1)tcrcEt N E A αρε=+442.551060000(18.235 1.025%) 1.15710-=+191.96kN=○2即将开裂时构件的变形 41.1571020000.23t l l mm ε-?=?=??=(4)构件的极限承载力为 270615166050166.05tuysN f A N kN ==?==【4-3】某钢筋混凝土轴心受拉构件的截面尺寸为300300b h mm mm ?=?,配有822的纵向受力钢筋,已知22.3/t f N mm =,422.410/c E N mm =?,2345/y f N mm =,521.9610/s E N mm =?。
(完整版)第4章应变式传感器习题及解答

(完整版)第4章应变式传感器习题及解答第 4 章应变式传感器、单项选择题1、为减⼩或消除⾮线性误差的⽅法可采⽤()。
A. 提⾼供电电压B. 提⾼桥臂⽐2、全桥差动电路的电压灵敏度是单臂⼯作时的()。
A. 不变B. 2 倍C. 4 倍D. 6 倍3、电阻应变⽚配⽤的测量电路中,为了克服分布电容的影响,多采⽤()8、当应变⽚的主轴线⽅向与试件轴线⽅向⼀致,且试件轴线上受⼀维应⼒作⽤时,应变⽚灵敏系数 K 的定义是()。
A .应变⽚电阻变化率与试件主应⼒之⽐B .应变⽚电阻与试件主应⼒⽅向的应变之⽐C .应变⽚电阻变化率与试件主应⼒⽅向的应变之⽐D .应变⽚电阻变化率与试件作⽤⼒之⽐9、制作应变⽚敏感栅的材料中,⽤的最多的⾦属材料是()。
A .两个桥臂都应当⽤⼤电阻值⼯作应变⽚B .两个桥臂都应当⽤两个⼯作应变⽚串联C .两个桥臂应当分别⽤应变量变化相反的⼯作应变⽚C. 提⾼桥臂电阻值D.提⾼电压灵敏度A .直流平衡电桥BC .交流平衡电桥D4、通常⽤应变式传感器测量()A. 温度 BC .加速度D5、影响⾦属导电材料应变灵敏系数A .导电材料电阻率的变化BC .导电材料物理性质的变化D6、产⽣应变⽚温度误差的主要原因有( A .电阻丝有温度系数BC .电阻丝承受应⼒⽅向不同 D7、电阻应变⽚的线路温度补偿⽅法有( A .差动电桥补偿法B C .补偿线圈补偿法DK 的主要因素是(.直流不平衡电桥.交流不平衡电桥.密度.电阻)。
.导电材料⼏何尺⼨的变化.导电材料化学性质的变化)。
.试件与电阻丝的线膨胀系数相同.电阻丝与试件材料不同)。
.补偿块粘贴补偿应变⽚电桥补偿法.恒流源温度补偿电路法A .铜B .铂C .康铜D .镍铬合⾦10、利⽤相邻双臂桥检测的应变式传感器,为使其灵敏度⾼、⾮线性误差⼩()。
D .两个桥臂应当分别⽤应变量变化相同的⼯作应变⽚在⾦属箔式应变⽚单臂单桥测⼒实验中不需要的实验设备是( A .直流稳压电源 B .低通滤波器 C .差动放⼤器D .电压表关于电阻应变⽚,下列说法中正确的是() A .应变⽚的轴向应变⼩于径向应变B .⾦属电阻应变⽚以压阻效应为主C .半导体应变⽚以应变效应为主D .⾦属应变⽚的灵敏度主要取决于受⼒后材料⼏何尺⼨的变化⾦属丝的电阻随着它所受的机械变形(拉伸或压缩)的⼤⼩⽽发⽣相应的变化的现象称为⾦属的()。
第4章 多组份系统热力学习题及解答

ln
1) 22
2436 (3.337 3.091) 2436 (6.428) 15660J mol1
(答:-8.13×103 J)
4-5 333.15 K 时甲醇的饱和蒸气压是 83.40 kPa,乙醇的饱和蒸气压是 47.00 kPa。 二者可形成理想液态混合物。若混合物的组成为二者的质量分数各为 50%,求 333.15 K 时平衡蒸气组成,以摩尔分数表示。 解:在 333.15K 时,设甲醇气体的摩尔分数为 yA ,则:
(2) pB pB* xB 2.93 0.4588 1.344kPa
(3) p pA pB 5.369 1.344 6.713kPa
(4) yA
pA p
5.369 6.713
0.7998 0.80 , yB
1 yA
1 0.80 0.20
(答:(1)5.36 kPa;(2)1.35 kPa;(3)6.71 kPa;(4)0.80,0.20)
解:1mol
气体
NH3 的化学势: (g)
(g,T)
RT
ln
p p
,(
p
p )
(NH3, g,T ) (NH3, g,T ) RT ln
pNH3 p
,( pNH3
p )
溶液中,溶质 NH3 的化学势:
(NH3, l,T )
(NH3, g,T )
NH3
x
A
p
* A
x
A
pB* (1 xA )
193.3 0.274
193.3 0.2740 66.6 0.726
第4章_组合逻辑电路习题解答
习题写出图所示电路的逻辑表达式,并说明电路实现哪种逻辑门的功能。
习题图解:B A B A B A B A B A F ⊕=+=+= 该电路实现异或门的功能分析图所示电路,写出输出函数F 。
习题图 解:[]B A B BB A F ⊕=⊕⊕⊕=)(已知图示电路及输入A 、B 的波形,试画出相应的输出波形F ,不计门的延迟.?解:B A B A B A AB B AB A AB B AB A F ⊕=•=•••=•••=由与非门构成的某表决电路如图所示。
其中A 、B 、C 、D 表示4个人,L=1时表示决议通过。
(1) 试分析电路,说明决议通过的情况有几种。
(2) 【 (3) 分析A 、B 、C 、D 四个人中,谁的权利最大。
习题图解:(1)ABD BC CD ABD BC CD L ++=••=C & && & D $ L B A " =1=1 =1FFA B[FB A(2)(3)根据真值表可知,四个人当中C 的权利最大。
分析图所示逻辑电路,已知S 1﹑S 0为功能控制输入,A ﹑B 为输入信号,L 为输出,求电路所具有的功能。
&习题图解:(1)011011)(S S B S A S S B S A L ⊕⊕+⊕=⊕⊕•⊕= (2)(3)当S 1S 0=00和S 1S 0=11时,该电路实现两输入或门,当S 1S 0=01时,该电路实现两输入或非门,当S 1S 0=10时,该电路实现两输入与非门。
(2)1¥电路逻辑功能为:“判输入ABC 是否相同”电路。
已知某组合电路的输入A 、B 、C 和输出F 的波形如下图所示,试写出F 的最简与或表达式。
习题图:解:(1)根据波形图得到真值表:,(2)由真值表得到逻辑表达式为C AB BC A C B A F ++=、设∑=)14,12,10,9,8,4,2(),,,(m D C B A F ,要求用最简单的方法,实现的电路最简单。
第4章光学仪器基本原理习题及解答

第四章 光学仪器的基本原理4.1.眼睛的构造简单地可用一折射球面来表示,其曲率半径为5.55mm ,内部为折射率等于43的液体,外部是空气,其折射率近似地等于1,试计算眼球的两个焦距。
用肉眼观察月球时月球对眼的张角为01,问视网膜上月球的像多大?解:眼睛的构造简单地可用一折射球面时,其物方焦点为'1 5.551.67413nr f cm n n⨯=-=-=---其像方焦点为'''43 5.55 2.22413n r f cm n n ==⨯=-- 根据折射定律有关系式''''''sin sin sin sin n n n nθθθθθθθθθ=≈≈≈因为很小,所以,''''''11tan 2.220.02941803n y d f f cm n θθθ=≈≈=⨯⨯=4.2.把人眼的晶状体看成距视网膜2cm 的一个简单透镜。
有人能看清楚距离在100cm 到300cm 间的物体,试问:(1)此人看清远点和近点时,眼睛透镜的焦距是多少?(2)为看清25cm 远的物体,需配戴怎样的眼镜?解:根据透镜的物像公式''111s s f -= (1)远点对应的焦距 将'2s cm = 300s cm =-代入上式''1112300300 1.987151f f cm-=-==近点对应的焦距将'2s cm = 100s cm =-代入上式''1112100100 1.96151f f cm-=-==(2)此人的近点为100cm ,要看清楚25cm 的物体,需要配戴眼镜使的25cm 的物体成虚象在100cm 处,所以应该配戴凸透镜(远视镜),根据透镜的物像公式''111s s f-= 其中'100s cm =- 25s cm =-'1110.10.25f =--- '1143300D f Φ==-+==(度)4.3.一照相机对准远物时,底片距物镜18cm ,当透镜拉至最大长度时,底片与物镜相距20cm ,求目的物在镜前的最近距离?解:根据透镜的物像公式''111s s f-= 当照相机对准远物时, 1s =-∞''11111s s f -= 所以 ''118s f cm ==当照相机对准最近物时,要成像必须把底片与物镜的距离拉到最大''22111s s f-= '220s cm =''21111112018s f s -=== 2180s cm =-目的物在镜前的最近距离为180厘米4.4.两星所成的视角为'4,用望远镜物镜照相,所得两像点相距1mm ,问望远镜物镜的焦距是多少?解:根据视角与透镜焦距的关系''1y U f -=, ''1185.987460180y f cm U π-===⨯ 4.5.一显微镜具有三个物镜和两个目镜。
工程制图第四章习题集答案解析
某
41 / 49
(1)
(2)
42 / 49
(3)
(4)
第四章 组合体的投影与构型设计 4-24、根据组合体的两投影画出第三投影,并徒手画出其轴测图。
班级
94
学号
某
43 / 49
(1)
(2)
44 / 49
(3)
(4)
第四章 组合体的投影与构型设计 4-25、根据组合体的两投影画出第三投影,并徒手画出其轴测图。
第四章 组合体的投影与构型设计
班级
77
学号
某
14 / 49
4-7、根据所给的正面投影进行组合体多种构型设计,画出水平面图和左侧立面图。
15 / 49
第四章 组合体的投影与构型设计
班级
4-8、根据所给的水平投影进行组合体多种构型设计,画出正面投影,并在下方徒手画出轴测图。
78
学号
某
16 / 49
17 / 49
(5) (6)
7 / 49
第四章 组合体的投影与构型设计 4-3、看懂立体图,找出相应的投影图,标出。
班级
学号
73 某
3
2
5
8 / 49
6
第四章 组合体的投影与构型设计 4-4、看懂立体图,找出相应的投影图,标出,并画出第三视图。
1
4
班级
学号
74 某
9 / 49
(1)
(2)
(3)
(4)
10 / 49
某
32 / 49
(3)
Hale Waihona Puke (4)第四章 组合体的投影与构型设计 4-18、补全下列组合体三视图中所缺的线。
班级
习题解答——第4章调度与死锁

第4章调度与死锁思考与练习题2.考虑下面的进程集合:(1)(2)分别对以上两个进程集合,计算使用先来先服务(FCFS)、时间片轮转法(时间片q=1)、短进程优先(SPN)、最短剩余时间优先(SRT,时间片q=1)、响应比高者优先(HRRN)及多级反馈队列(MFQ,第1个队列的时间片为1,第i(i<1)个队列的时间片q=2(i-1))算法进行CPU调度,请给出各进程的完成时间、周转时间、带权周转时间,及所有进程的平均周转时间和平均带权周转时间。
解答:(1)平均带权周转时间W=(1+1.4+3.5+1.2+1.6)/5=8.7/5=1.74平均带权周转时间W= (2+2.5+2+1.8+1.6)/5=9.4/5=1.98平均带权周转时间W=(1+1.8+1+1.2+1.6)/5=6.6/5=1.32平均带权周转时间W=(1+1.8+1+1.2+1.6)/5=6.6/5=1.32平均带权周转时间W=(1+1.4+3.5+1.2+1.6)/5=8.7/5=1.74多级反馈队列:第1个队列的时间片为1,第i(i<1)个队列的时间片q=2(i-1))即:平均带权周转时间W= (1.33+2.5+1.8+1.8+1.6)/5=9.03/5=1.806(2)平均带权周转时间W=(1+1+9+1.89)/4=3.22平均带权周转时间W=(1+1.89+1+1.89)/4=1.45平均带权周转时间W=3.22平均带权周转时间W=1.25平均带权周转时间W=3.22平均带权周转时间W=1.4453.考虑系统中出现的情况:(1)计算每个进程还可能需要的资源,并填入表的“仍然需要”栏目中。
(2)系统当前是否处于安全状态?为什么?(3)系统当前是否死锁?为什么?(4)如果进程P3又有新的请求(0,2,0,0),系统是否可以安全地接受此请求?解答:存在安全序列<P1,P4,P5,P2,P3>(3)不会发生死锁,因为存在安全序列,进程按此顺序执行可保证不死锁。
第4章习题及答案
第四章习题及解答4-3 什么是进程?进程与程序的主要区别是什么?答:进程是一个具有一定独立功能的程序关于某个数据集合的一次活动。
进程与程序的主要区别是:(1) 程序是指令的有序集合,是一个静态概念。
进程是程序在处理机的一次执行过程,是一个动态概念。
进程是有生命期的,因创建而产生,因调度而执行,因得到资源而暂停,因撤消而消亡;(2) 进程是一个独立的运行单元,是系统进行资源分配和调度的独立单元,而程序则不是。
(3) 进程与程序之间无一一对应关系。
一个程序可以对应多个进程,一个进程至少包含一个程序。
4-4 图4.2标明程序段执行的先后次序。
其中:I表示输入操作,C表示计算操作,P 表示打印操作,下角标说明是对哪个程序进行上述操作。
请指明:(1)哪些操作必须有先后次序? 其原因是什么?(2)哪些操作可以并发执行? 其原因又是什么?答:(1) ①I n、C n和P n之间有先后顺序要求,这是由于程序本身的逻辑要求。
②使用同一设备的不同的程序段,如C1…C n,I1…I n,P1…P n,之间有先后顺序要求,这是由于设备某一时刻只能为一个程序服务。
(2) 不同程序使用不同设备时,占用不同设备,无逻辑关系,可以并发执行,如I2和C1;I3、C2和P1。
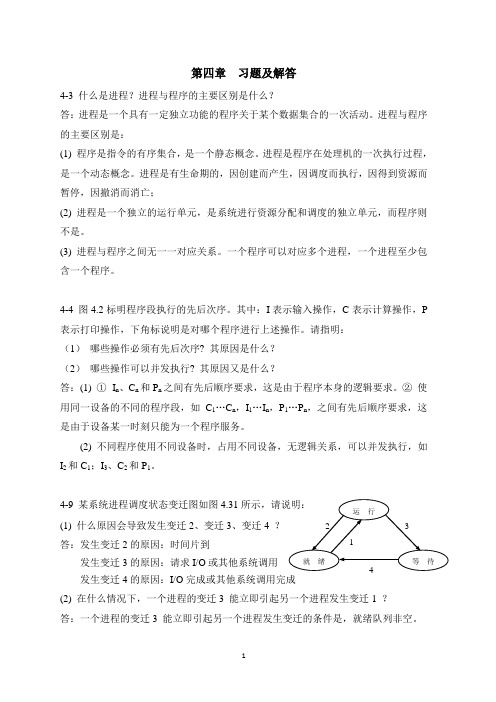
4-9 某系统进程调度状态变迁图如图4.31(1) 什么原因会导致发生变迁2、变迁3、变迁4 ?答:发生变迁2的原因:时间片到发生变迁3的原因:请求I/O或其他系统调用发生变迁4的原因:I/O完成或其他系统调用完成(2) 在什么情况下,一个进程的变迁3 能立即引起另一个进程发生变迁1 ?答:一个进程的变迁3 能立即引起另一个进程发生变迁的条件是,就绪队列非空。
(3) 下列因果变迁是否可能发生?若可能,需要什么条件?a. 2→1;b. 3→2;c. 4→1答:a. 2→1 不需要条件,一定会发生。
b. 3→2 不可能发生。
c. 4→1 可能发生,条件:就绪队列为空,或在可剥夺调度方式下,转变为就绪状态的进程优先级最高。
发电厂电气部分第四章习题解答
第四章电气主接线4—1 对电气主接线的基本要求是什么?答:对电气主接线的基本要求是:可靠性、灵活性和经济性.其中保证供电可靠是电气主接线最基本的要求。
灵活性包括:操作、调度、扩建的方便性。
经济性包括:节省一次投资,占地面积小,电能损耗少。
4-2 隔离开关与断路器的区别何在?对它们的操作程序应遵循哪些重要原则?答:断路器具有专用灭弧装置,可以开断或闭合负荷电流和开断短路电流,故用来作为接通和切断电路的控制电器.而隔离开关没有灭弧装置,其开合电流极小,只能用来做设备停用后退出工作时断开电路。
4—3 防止隔离开关误操作通常采用哪些措施?答:为了防止隔离开关误操作,除严格按照规章实行操作票制度外,还应在隔离开关和相应的断路器之间加装电磁闭锁和机械闭锁装置或电脑钥匙。
4-4 主母线和旁路母线各起什么作用?设置专用旁路断路器和以母联断路器或者分段断路器兼作旁路断路器,各有什么特点?检修出线断路器时,如何操作?答:主母线主要用来汇集电能和分配电能。
旁路母线主要用与配电装置检修短路器时不致中断回路而设计的。
设置旁路短路器极大的提高了可靠性。
而分段短路器兼旁路短路器的连接和母联短路器兼旁路断路器的接线,可以减少设备,节省投资。
当出线和短路器需要检修时,先合上旁路短路器,检查旁路母线是否完好,如果旁路母线有故障,旁路断路器在合上后会自动断开,就不能使用旁路母线。
如果旁路母线完好,旁路断路器在合上就不会断开,先合上出线的旁路隔离开关,然后断开出线的断路器,再断开两侧的隔离开关,有旁路短路器代替断路器工作,便可对短路器进行检修。
4-5 发电机—变压器单元接线中,在发电机和双绕作变压器之间通常不装设断路器,有何利弊?答:发电机和双绕组变压器之间通常不装设断路器,避免了由于额定电流或短路电流过大,使得在选择出口断路器时,受到制造条件或价格等原因造成的困难。
但是,变压器或者厂用变压器发生故障时,除了跳主变压器高压侧出口断路器外,还需跳发电机磁场开关,若磁场开关拒跳,则会出现严重的后果,而当发电机定子绕组本身发生故障时,若变压吕高压侧失灵跳闸,则造成发电机和主变压器严重损坏.并且发电机一旦故障跳闸,机组将面临厂用电中断的威胁。
离散数学_第_4_章习题解答讲解
第四章归结法原理习题与解答1. 用归结法证明:(1)(2)(3)(4)(5)(6)解(1) 首先将p→q,p→r,¬(p→q∧r)化为合取范式。
p→q⇔¬p∨qp→r⇔¬p∨r¬(p→q∧r)⇔¬(¬p∨(q∧r))⇔p∧(¬q∨¬r) 给出子句集{¬p∨q,¬p∨r,p,¬q∨¬r}的反驳如下。
⑴ ¬p∨q⑵ ¬p∨r⑶ p⑷ ¬q∨¬r⑸ q 由⑴和⑶由⑵和⑶⑹ r⑺ ¬r 由⑷和⑸⑻ □ 由⑹和⑺因此,p→q,p→r|=p→q∧r(2) 首先将p→r,q→r,¬(p∨q→r)化为合取范式。
p→r⇔¬p∨rq→r⇔¬q∨r¬(p∨q→r)⇔(p∨q)∧¬r给出子句集{¬p∨r,¬q∨r,p∨q,¬r}的反驳如下。
⑴ ¬p∨r⑵ ¬q∨r⑶ p∨q⑷ ¬r⑸ q∨r 由⑴和⑶ p→q,p→r|=p→q∧r p→r,q→r|=p∨q→r p→q∨r|=(p→q)→(p→r)p∧q→r|=(p→r)∨(q→r) p∨q∨r,p→r|=q∨r (p→q)→(p→r)|=p→(q→r)由⑵和⑸⑹ r⑺ □由⑷和⑹因此,p→r,q→r|=p∨q→r(3) 首先将p→q∨r,¬((p→q)∨(p→r))化为合取范式。
p→q∨r⇔¬p∨q∨r¬((p→q)∨(p→r))⇔¬((¬p∨q)∨(¬p∨r))⇔p∧¬q∧¬r 给出子句集{¬p∨q∨r,p,¬q,¬r}的反驳如下。
⑴ ¬p∨q∨r⑵ p⑶ ¬q⑷ ¬r⑸ q∨r 由⑴和⑵⑹ r 由⑶和⑸⑺ □ 由⑷和⑹因此,p→q∨r|=(p→q)∨(p→r)(4) 首先将p∧q→r,¬((p→r)∨(q→r))化为合取范式。
第四章习题及解答
第四章习题及解答4.1 数字电路设计的基本步骤有哪些?每一步完成的目标任务是什么?见书P48。
4.2 组合逻辑电路的设计为什么可以从卡诺图直接进入?因为逻辑函数可以有多种有表达形式,卡诺图就是其中的一种,因此,直接从卡诺图直接进入设计就是最直接、最有效的一种方式,它简化了设计,更便于化简。
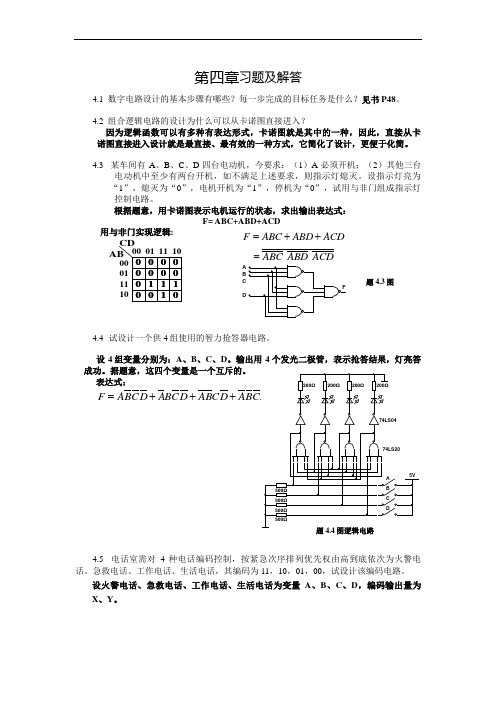
4.3 某车间有A 、B 、C 、D 四台电动机,今要求:(1)A 必须开机;(2)其他三台电动机中至少有两台开机,如不满足上述要求,则指示灯熄灭。
设指示灯亮为“1”,熄灭为“0”,电机开机为“1”,停机为“0”,试用与非门组成指示灯控制电路。
根据题意,用卡诺图表示电机运行的状态,求出输出表达式:F= ABC+ABD+ACD用与非门实现逻辑:4.4 试设计一个供4组使用的智力抢答器电路。
设4组变量分别为:A 、B 、C 、D 。
输出用4个发光二极管,表示抢答结果,灯亮答表达式: F ABCD ABCD ABCD =+++4.5 电话室需对4种电话编码控制,按紧急次序排列优先权由高到底依次为火警电话、急救电话、工作电话、生活电话,其编码为11,10,01,00,试设计该编码电路。
设火警电话、急救电话、工作电话、生活电话为变量A 、B 、C 、D ,编码输出量为X 、Y 。
AB CD01001110000000000001111000 01 11 10 F ABC ABD ACDABC ABD ACD =++=AB C D题4.3图列出编码真值表:4.6 试用3线-8线译码器和门电路实现以下函数:4.7 试用四选一多路选择器实现函数Y ABC AC BC =++。
1. 求出最小项、及最小项反函数非表达式:2. 对比四选一多路选择器表达式:0123Y ABD ABD ABD ABD =+++我们发现用原函数无法用一个四选一选择器实现,但反函数只有三个最小项,因为实际的数据选择器,它们都有两个互补的变量输出,因此从反变量输出端(~W)就可以达到要求了。
第4章 氧化还原反应 习题参考答案
第4章 氧化还原反应 习题参考答案1.解:S 的氧化数分别为-2、0、2、4、5、6。
2.解:(1)3Cu + 8HNO 3(稀) → 3Cu(NO 3)2+2 NO ↑ + 4H 2O(2)4Zn + 5H 2SO 4(浓) →4ZnSO 4 +H 2S↑ + 4H 2O(3)KClO 3 + 6 FeSO 4 + 3H 2SO 4 → KCl +3 Fe 2 (SO 4)3 + 3H 2O (4)Cu 2S + 22HNO 3 → 6Cu (NO 3)2 + 3H 2SO 4 + 10NO↑ +8 H 2O 3.解:(1)2I + H O + 2H → I +2H O(2) Cr 2O 7+ 3H 2S + 8H → 2Cr + 3S↓ + 7H 2O(3) ClO 3+ 6Fe + 6H → Cl +6Fe +3H 2O(4) 1/2 Cl + 2e - →2Cl -Cl 2 + 2OH →Cl +ClO + H 2O(5)1 Zn + 4OH -- 2e - →[Zn (OH)4]2-+) 1ClO -+ H 2O +2e -→Cl -+ 2OH-Zn + ClO -+2OH -+ H 2O→[Zn (OH)4]2- + Cl -(6) 2 MnO 4- + e -→ MnO 24-+) 1 SO 23- + OH -- 2e -→SO 24-+ H 2O2MnO 4- +SO 23- + 2OH -→2 MnO 24-+SO 24- + H 2O4.解:(1)(-)Pt ,I 2(s)∣I -(c 1)‖Cl -(c 2)∣Cl 2(P), Pt (+)(2)(-)Pt ∣Fe 2+, Fe 3+ (c 3)‖MnO 4-(c 3), Mn 2+(c 4),H +(c 5)∣Pt (+)(3)(-)Zn ∣ZnSO 4 (c 1)‖CdSO 4 (c 2)∣Cd (+)5.解:由于E(F 2/HF)>E(S 2O 28-/SO 42-)>E(H 2O 2/H 2O)>E(MnO 4-/Mn 2+)>E(PbO 2/Pb 2+)>E(Cl 2/Cl -)>E(Br 2/Br -)>E(Ag +/Ag)>E(Fe 3+/Fe 2+)>E(I 2/I -)故氧化能力顺序为F 2 >S 2O 28-> H 2O 2> MnO 4->PbO 2>Cl 2 >Br 2 > Ag +>Fe 3+>I 2。
第4章习题解答

第4章 习题讲解 章
为变址寄存器, R1为基址寄存器 PC为程序计数器 为基址寄存器, 【题4-6 】 R为变址寄存器, R1为基址寄存器,PC为程序计数器 OP I
寻址 方式 (1) ) (2) ) (3) ) (4) ) (5) ) (6) ) I 0 0 0 0 1 1 X 00 01 10 11 00 11
【题4-5】指令格式结构如下所示,试分析指令格式及 】指令格式结构如下所示, 寻址方式的特点 的特点。 寻址方式的特点。
15 12 11 9 8 6 5 3 2 0
OP
寻址方式
寄存器
寻址方式
寄存器
答: ① 所示指令是单字长二地址指令。 所示指令是单字长二地址指令 单字长二地址指令。
操作码字段OP有 可以指定2 16条指令 ② 操作码字段 有4位,可以指定24=16条指令。 可以是RR RS或SS型指令 RR、 型指令。 寻址方式有2 ③ 寻址方式有23=8种,可以是RR、RS或SS型指令。
第4章 典型例题 章
为操作码字段, 【例4.2】指令格式如下所示,OP为操作码字段,试分 】 指令格式如下所示, 为操作码字段 析指令格式特点。 析指令格式特点。
15 10 7 4 3 0
OP
——
源寄存器
变址寄存器
位移量 (16位) 位
答:
双字长二地址指令; ① 双字长二地址指令; 操作码字段OP OP为 可以指定2 64种操作 种操作; ② 操作码字段OP为6位,可以指定26=64种操作; 一个操作数在源寄存器( 16个 ③ 一个操作数在源寄存器(共16个)中,另一个操作数在内存储 器中(有效地址由变址寄存器和位移量决定) 所以是RS 指令。 RS型 器中 ( 有效地址由变址寄存器和位移量决定 ) , 所以是 RS 型 指令 。
第4章集成运算放大器习题解答
第4章集成运算放⼤器习题解答第四章习题参考答案4-1 什么叫“虚短”和“虚断”?答虚短:由于理想集成运放的开环电压放⼤倍数⽆穷⼤,使得两输⼊端之间的电压近似相等,即-+≈u u 。
虚断:由于理想集成运放的开环输⼊电阻⽆穷⼤,流⼊理想集成运放的两个输⼊端的电流近似等于零,即0≈=-+i i 。
4-2 理想运放⼯作在线性区和⾮线性区时各有什么特点?分析⽅法有何不同?答理想运放⼯作在线性区,通常输出与输⼊之间引⼊深度负反馈,输⼊电压与输出电压成线性关系,且这种线性关系只取决于外部电路的连接,⽽与运放本⾝的参数没有直接关系。
此时,利⽤运放“虚短”和“虚断”的特点分析电路。
理想运放⼯作在⾮线性去(饱和区),放⼤器通常处于开环状态,两个输⼊端之间只要有很⼩的差值电压,输出电压就接近正、负电压饱和值,此时,运放仍具有“虚断”的特点。
4-3 要使运算放⼤器⼯作在线性区,为什么通常要引⼊负反馈?答由于理想运放开环电压放⼤倍数∞=uo A ,只有引⼊深度负反馈,才能使闭环电压放⼤倍数FA 1u =,保证输出电压与输⼊电压成线性关系,即运放⼯作在线性区。
4-4 已知F007运算放⼤器的开环放⼤倍数dB A uo 100=,差模输⼊电阻Ω=M r id 2,最⼤输出电压V U sat o 12)(±=。
为了保证⼯作在线性区,试求:(1)+u 和-u 的最⼤允许值;(2)输⼊端电流的最⼤允许值。
解(1)由运放的传输特性5o uo 1012===++u u u A 则V 102.1101245--+?===u u(2)输⼊端电流的最⼤允许值为A 106102102.11164id --+?=??==r u I 4-5 图4-29所⽰电路,设集成运放为理想元件。
试计算电路的输出电压o u 和平衡电阻R 的值。
解由图根据“虚地”特点可得0==+-u u图中各电流为601.01--=u i 305.02---=u i 180o f u u i -=- 由“虚断”得f 21i i i =+以上⼏式联⽴,可得V 7.2o =u平衡电阻为Ω==k R 18180//60//30图4-29 题4-5图4-6 图4-30所⽰是⼀个电压放⼤倍数连续可调的电路,试问电压放⼤倍数uf A 的可调范围是多少?图4-30 题4-6图解设滑线变阻器P R 被分为x R 和x P R R -上下两部分。
第4章 字符串 习题参考答案
第4章串习题参考答案一、基础知识题4.1 简述下列每对术语的区别:空串和空格串;串常量与串变量;主串和子串;串变量的名字和串变量的值;静态分配的顺序串与动态分配的顺序串。
【解答】不含任何字符的串称为空串,其长度为0。
仅含有空格字符的串称为空格串,其长度为串中空格字符的个数。
空格符可用来分割一般的字符,便于人们识别和阅读,但计算串长时应包括这些空格符。
空串在串处理中可作为任意串的子串。
用引号(数据结构教学中通常用单引号,而C语言中用双引号)括起来的字符序列称为串常量,串值可以变化的量称为串变量。
串中任意个连续的字符组成的子序列被称为该串的子串。
包含子串的串又被称为该子串的主串。
子串在主串中第一次出现的第一个字符的位置称子串在主串中的位置。
串变量的与其它变量一样,要用名字引用其值,串变量的名字也是标识符,串变量的值可以修改。
串的存储也有静态存储和动态存储两种。
静态存储指用一维数组,通常一个字符占用一个字节,需要静态定义串的长度,具有顺序存储结构的优缺点。
若需要在程序执行过程中,动态地改变串的长度,则可以利用标准函数malloc()和free()动态地分配或释放存储单元,提高存储资源的利用率。
在C语言中,动态分配和回收的存储单元都来自于一个被称之为“堆”的自由存储区,故该方法可称为堆分配存储。
类型定义如下所示:typedef struct{ char *str;int length;}HString;4.2设有串S=’good’,T=’I︼am︼a︼student’,R=’!’,求:(1)StringConcat(T,R) (2)SubString(T,8,7)(3)StringLength(T) (4)Index(T,’a’)(5)StringInsert(T,8,S)(6)Replace(T,SubString(T,8,7),’teacher’)【解答】(1) StringConcat(T,R)=’I︼am︼a︼student!’(2) SubString(T,8,7)=’student’(3) StringLength(T)=14(4) Index(T,’a’)=3(5) StringInsert(T,8,S)=’I︼am︼a︼goodstudent’(6) Replace(T,SubString(T,8,7),’teacher’)= ’I︼am︼a︼teacher’4.3若串S1=‘ABCDEFG’,S2=‘9898’,S3=‘###’,S4=‘012345’,执行concat(replace(S1,substr(S1,length(S2),length(S3)),S3),substr(S4,index(S2,‘8’),length(S2))) 操作的结果是什么?【解答】concat(replace(S1,substr(S1,length(S2),length(S3)),S3),substr(S4,index(S2,‘8’),length(S2))) = concat(replace(S1,substr(S1,4,3),S3),substr(S4,2,4))= concat(replace(S1,’DEF’,S3),’1234’)= concat(‘ABC###G ’,’1234’)= ‘ABC###G1234’4.4 设S 为一个长度为n 的字符串,其中的字符各不相同,则S 中的互异的非平凡子串(非空且不同于S 本身)的个数是多少?【解答】长度为n 的字符串中互异的非平凡子串(非空且不同于S 本身)的个数计算如下: 长度为1的子串有n 个,长度为2的子串有n-1个,长度为3的子串有n-2个,……,长度为n-1的子串有2个,长度为n 的子串有1个(按题意要求这个子串就是S 本身,不能计算在总数内)。
计算机组成原理第四章课后习题和答案解析[完整版]
![计算机组成原理第四章课后习题和答案解析[完整版]](https://img.taocdn.com/s3/m/08bc56dd551810a6f52486ec.png)
第4章存储器1. 解释概念:主存、辅存、Cache、RAM、SRAM、DRAM、ROM、PROM、EPROM、EEPROM、CDROM、Flash Memory。
答:主存:主存储器,用于存放正在执行的程序和数据。
CPU可以直接进行随机读写,访问速度较高。
辅存:辅助存储器,用于存放当前暂不执行的程序和数据,以及一些需要永久保存的信息。
Cache:高速缓冲存储器,介于CPU和主存之间,用于解决CPU和主存之间速度不匹配问题。
RAM:半导体随机存取存储器,主要用作计算机中的主存。
SRAM:静态半导体随机存取存储器。
DRAM:动态半导体随机存取存储器。
ROM:掩膜式半导体只读存储器。
由芯片制造商在制造时写入内容,以后只能读出而不能写入。
PROM:可编程只读存储器,由用户根据需要确定写入内容,只能写入一次。
EPROM:紫外线擦写可编程只读存储器。
需要修改内容时,现将其全部内容擦除,然后再编程。
擦除依靠紫外线使浮动栅极上的电荷泄露而实现。
EEPROM:电擦写可编程只读存储器。
CDROM:只读型光盘。
Flash Memory:闪速存储器。
或称快擦型存储器。
2. 计算机中哪些部件可以用于存储信息?按速度、容量和价格/位排序说明。
答:计算机中寄存器、Cache、主存、硬盘可以用于存储信息。
按速度由高至低排序为:寄存器、Cache、主存、硬盘;按容量由小至大排序为:寄存器、Cache、主存、硬盘;按价格/位由高至低排序为:寄存器、Cache、主存、硬盘。
3. 存储器的层次结构主要体现在什么地方?为什么要分这些层次?计算机如何管理这些层次?答:存储器的层次结构主要体现在Cache-主存和主存-辅存这两个存储层次上。
Cache-主存层次在存储系统中主要对CPU访存起加速作用,即从整体运行的效果分析,CPU访存速度加快,接近于Cache的速度,而寻址空间和位价却接近于主存。
主存-辅存层次在存储系统中主要起扩容作用,即从程序员的角度看,他所使用的存储器其容量和位价接近于辅存,而速度接近于主存。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4-3
答:进程,即是一个具有一定独立功能的程序关于某个数据集合的一次活动。
进程与程序的主要区别是:
(1)程序是指令的有序集合,是一个静态概念,其本身没有任何运行的含义,进程是程序在处理机上的一次执行过程,是一个动态概念。
(2)程序作为软件资料可长期保存,而进程是有生命期的,因创建而产生、因调度而执行、因得不到资源而暂停、因撤消而消亡。
(3)设a、b两并发进程,它们共享一临界资源。其执行临界区的算法框图如下图,
进程A和进程B为互斥进程,则需一个互斥信号量s,初值为1,表示临界资源初始情况下无进程使用。
main()
{
int s=1;
cobegin
pa();
pb();
coend
}
pa()
{
P(s);
进入csa…
V(s);
}
pb()
{
P(s);
4-12 n
main()
{
int mutQ=1;//信号量mutQ用来管理公共变量Q,其值为1,表示初始情况下没有进程使用该变量
cobegin
p1();p2();…;pn();
coend
}
p1()
{
…
P(mutQ);
使用公共变量Q..//或cs(i)…..
V(mutQ);
…
}
mutQ的取值范围:1-n~1
进程同步是指多个相关进程在执行次序上的协调。这些进程相互合作,在一些关键点上可能需要互相等待或互通消息。
4-18
(1)3个进程并发活动的进程流图如下图所示,其同步算法描述如下
main()
{
int s=-1;
cobegin
p1();
p2();
p3();
coend
}
p1()
{
…
V(s);
}
p2()
{
…
V(s);
当有一个进程发生变迁3时,将会让出处理器,这时调度必然在就绪队列中选中一个进程使之由就绪状态变为运行状态。
(3)下述因素变迁是否可能发生?如果可能,是在什么情况下发生?
a.21可能发生。有一个进程由运行状态变就绪状态,它让出处理器,则这时必有一个进程由就绪状态转运行状态。
b.32不可能发生。有一个进程由运行状态变等待状态,它让出处理器,这种变迁不会导致另一个进程由运行状态转就绪状态。
进入csb…
V(s);
}
4-21
答:线程有时也称为轻量级进程,它是比进程更小的活动单位,它是进程中的一个执行路径。一个进程可以有多个执行路径即线程。
线程和进程的主要区别如下:
(1)线程是进程的一个组成部分。一个进程可以有多个线程,而且至少有一个可执行的线程。(2)进程是资源分配的基本单位,它拥有自己的地址空间和各种资源。线程是处理机调度的基本单位,它只能和其他线程共享进程的资源,而本身并不具有任何资源。(3)进程的多个线程都在进程的地址空间内活动。这样,在以线程为单位进行处理机调度和切换时,由于不发生资源变化特别是地址空间的变化,因此切换时间较短。而以进程为单位进行处理机调度和切换时,由于涉及到资源转移及现场保护等问题,将导致切换时间变长和资源利用率降低。(4)线程和进程一样,都有自己的状态和相应的同步机制。但是,由于线程没有自己单独的程序和数据空间,因而不能像进程的程序和数据那样交换到外存去。
p2();
p3();
coend
}
p1()
{
…
V(s1);
}
p2()
{
…
V(s2);
}
p3()
{
P(s1);
P(s2);
…
}
(2)设a、b两进程共用一个缓冲区,a向t写信息,b从t读出信息,算法如下图
进程A和进程B共用一个缓冲区,则缓冲区是共享资源,进程A向其中写入信息前需由P操作控制分配资源,当进程A写完消息,则可向进程B发送消息,通知B进程可以去取消息了,故进程A和B是同步进程。
1-n:表示一个进程正在使用公共变量Q,另有n-1个进程在等待使用公共变量Q
0:表示一个进程正在使用公共变量Q,没有进程等待使用公共变量Q
1:表示初始情况下没有进程使用该变量
4-14
(a)(b)
(a)解:
main()
{
int s12=0,s13=0,s14=0;
cobegin
p1();
p2();
p3();
(5)进程的调度和控制大多由操作系统的内核完成,而线程的控制既可以由操作系统内核完成,也可以由用户控制完成。
4-22
TASK_RUNNING就绪/运行状态
TASK_INTERRUPTIBLE尝试睡眠状态
TASK_UNINTERRUPTIBLE浅度睡眠状态
TASK_STOPPED暂停状态
TASK_ZOMBIE僵死状态
4-23
}
p3()
{
P(s);
…
}
参考解答:
因p1和p2进程是p3进程开始执行的先决条件,即当p1和p2进程均执行完毕时,p3才能执行,则p3需有两个信号量,分别表示p1进程执行完毕的信号量s1,以及p2进程执行完毕的信号量s2。则同步算法描述如下:
main()
{
int s1=0,s2=0;
cobegin
p1();
c.41不可能发生。一个进程由等待状态变就绪状态,只是自身进程的状态变迁,不涉及处理器,故不会引起其它进程由就绪状态变运行状态。
4-11
为了描述一个进程和其它进程,以及系统资源的关系,为了刻画一个进程在各个不同时期所处的状态,人们采用了一个与进程相联系的数据块,称为进程控制块(PCB)。
其作用:标识一个进程的存在。
需为进程A定义私用信号量S1,初值为1表示缓冲区为空,为进程B定义私用信号量S2,初值为0,表示缓冲区没有消息。算法描述:
main()
{
int s1=1,s2=0;
cobegin
pa();
pb();
coend
}
pa()
{
P(s1);
写消息….
V(s2);
}
pb()
{
P(s2);
读消息…
V(s1);
}
int ta=1,tb=0;// ta表示缓冲区T是否为空,tb表示是否为满。
cobegin
get;
copy;
put;
coend
}
get()
{
while(1)
{
P(sa);
input data to buffer S;
V(sb);
}
}
copy ()
{
while(1)
{
P(sb);
copy data from buffer S;
p4();
coend
}
p1()
{
p1 execute;
V(s12);
V(s13);
V(s14);
}
p2()
{
P(s12);
p2 execute;
}
pБайду номын сангаас()
{
P(s13);
p3 execute;
}
p4()
{
P(s14);
p4 execute;
}
4-15
解:
main()
{
int sa=1,sb=0;// sa表示缓冲区S是否为空,sb表示是否为满。
对进程区分出这几种状态主要是为了便于系统对进程的管理和控制。
4-7
4-8
4-9
(1)什么原因导致变迁2、变迁3、变迁4?
变迁2:某进程的时间片满
变迁3:某进程请求服务,或等待事件
变迁4:某进程请求服务完成,或等待事件发生
(2)当观察系统中进程时,可能看到某一进程产生的一次状态变迁将导致另一进程做一次状态变迁,这两个变迁称为因果变迁。在什么情况下,一个进程的变迁3能立即引起另一个进程发生变迁1?
(3)程序是记录在介质上指令的有序集合,而进程则由程序、数据和进程控制块3部分组成。
(4)进程与程序之间无一一对应关系。不同的进程可以包含同一程序,同一程序在执行中也可以产生多个进程。
(5)进程是一个独立的运行单位,也是系统进行资源分配和调度的独立单位。而程序无此概念。
4-6
答:进程有三个基本状态:运行状态、就绪状态和等待状态(又称阻塞、挂起、睡眠)。
V(sa);
P(ta);
input copy-data to buffer T;
V(tb);}
}
put()
{
while(1)
{
P(tb);
output data to buffer S;
V(ta);
}
}
4-16
答:在操作系统中,当一个进程进入临界区使用临界资源时,另一个进程必须等待,当占用临界资源的进程退出临界区后,另一进程才被允许去访问此临界资源。我们称进程之间的这种相互制约关系为互斥。