5—3圆度误差的测量精品PPT课件
圆度误差的测量.ppt
图5-1
在生产中如何控制零件圆不圆呢?
圆度正是控制圆柱面、圆锥面得截面和球面 零件任意截面圆的程度的指标;圆柱度则是控制 圆柱面的圆度、素线直线度、轴线直线度等圆柱 面得横截面和纵截面的综合误差的指标。
圆度误差的近似测量方法有两点和三点法, 为生产中常用的方法,操作也很简单。
圆度测量方法
圆度测量目录定义方法1.回转轴法2.三点法3.两点法4.投影法5.坐标法误差评定定义长度计量技术中对圆度误差的测量。
圆度测量有回转轴法、三点法、两点法、投影法和坐标法等方法。
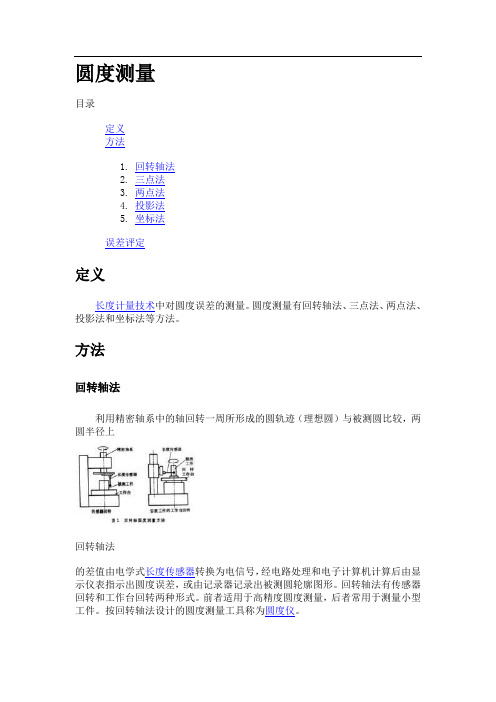
方法回转轴法利用精密轴系中的轴回转一周所形成的圆轨迹(理想圆)与被测圆比较,两圆半径上回转轴法的差值由电学式长度传感器转换为电信号,经电路处理和电子计算机计算后由显示仪表指示出圆度误差,或由记录器记录出被测圆轮廓图形。
回转轴法有传感器回转和工作台回转两种形式。
前者适用于高精度圆度测量,后者常用于测量小型工件。
按回转轴法设计的圆度测量工具称为圆度仪。
三点法常将被测工件置于V形块中进行测量。
测量时,使被测工件在V形块中回转一周,从测微仪(见比较仪)读出最大示值和最小示值,两示值差之半即为被测工件外圆的圆度误差。
此法适用于测量具有奇数棱边形状误差的外圆三点法或内圆,常用2α角为90°、120°或72°、108°的两块V形块分别测量。
两点法常用千分尺、比较仪等测量,以被测圆某一截面上各直径间最大差值之半作为此截面的圆度误差。
此法适于测量具有偶数棱边形状误差的外圆或内圆。
投影法常在投影仪上测量,将被测圆的轮廓影像与绘制在投影屏上的两极限同心圆比较,从投影法而得到被测件的圆度误差。
此法适用于测量具有刃口形边缘的小型工件。
坐标法一般在带有电子计算机的三坐标测量机上测量。
按预先选择的直角坐标系统测量出被测圆上若干点的坐标值x、y,通过电子计算机按所选择的圆度误差评定方法计算出被测圆的圆度误差。
误差评定圆度误差评定有4种主要方法。
①最小区域法:以包容被测圆轮廓的半径差为最小误差评定的两同心圆的半径差作为圆度误差。
②最小二乘圆法:以被测圆轮廓上相应各点至圆周距离的平方和为最小的圆的圆心为圆心,所作包容被测圆轮廓的两同心圆的半径差即为圆度误差。
③最小外接圆法:只适用于外圆。
以包容被测圆轮廓且半径为最小的外接圆圆心为圆心,所作包容被测圆轮廓的两同心圆半径差即为圆度误差。
形位公差详解 含图片说明
1
表面要素 一般采用比较法 采点测量;如前 后端面对底面的 垂直度度
2
中心要素 一般采用轮廓采 点、计算轴线、 再评价轴线的方 法;如缸孔与曲 轴孔的垂直度
3
功能性量规检测 主要是为了保证 装配要求;如螺 纹孔、定位销孔 对端面的垂直度
形位公差的分类介绍 垂直度
面对面、面对线、线对线的垂直度,公差带形状为两平行平面
19.7 - 20
0 M
包容要求(孔)
- 0.3
LMS = 19.7
MMS = 20
形 位
20 - 20.3
0.3
0 M
形 位
0.3
实际应用:
1
2
偏摆仪 是用于检测圆跳 动及全跳动的专 用量仪
专用检具
适用于不同工件、不 同场合的检测要求; 一般通过布置多个测 点同时测量全跳动, 而不是通过测点移动 ;如曲轴止推面的全 跳动;缸孔缸套端面 对缸孔的全跳动
公差原则
公差原则
公差原则,线性尺寸公差与形位公差之间关系。
公差原则分类:
直线度
给一个方向
给二个方向
公差带形状为两平行平面
公差带形状为两组相互垂直的两平行平面
形位公差的分类介绍 直线度
公差带形状为一个圆柱
Ø
Ø
素线直线 度
轴线直线 度
被测要素是轮廓要素时,箭头置于 要素的轮廓线或轮廓线的延长线上 (但必须与尺寸线明显地分开)
被测要素是中心要素时,带箭头的 指引线应与尺寸线的延长线对齐。
8 - 8.25
形
位
0.4 L A
0.65
0.4 6
A
0
+0.25
《圆度误差的测量》课件
球面测量法
使用具有球面曲率的测量仪器 进行测量,适用于小批量生产。
运动轮廓法
通过测量运动轮廓的变化来推 断工件的圆度误差。
测量工具
星形指示仪
通过接触工件表面并检测变形 以测量圆度误差。
光学环形投影仪
利用光学原理进行投影和测量, 精度更高。
三点法测量仪
使用三个测量点来确定工备
确保测量仪器的准确性和稳定性,以及工件表面的清洁度。
2 测量步骤及方法
按照测量方法的步骤进行操作,注意测量点的选择和测量顺序。
3 实验注意事项
注意避免外界干扰因素对测量结果的影响,进行多次测量以提高准确性。
结论与应用
圆度误差的测量结果处理
根据测量结果进行数据分析和处理,以确定工件的圆度误差。
圆度误差的应用场景
圆度误差的准确测量对于精密零件制造、机械装配和精密仪器具有重要意义。
《圆度误差的测量》PPT 课件
本课程将介绍圆度误差的测量方法和工具使用,以及相关注意事项和应用场 景。
简介
圆度误差的概念
圆度误差是指实际圆形与理论圆形之间的偏差。
圆度误差的影响
圆度误差会影响零件的机械性能、运动平稳度 和密封性能。
测量方法
机床测量法
使用机床上的测量装置对工件 进行测量,适用于大批量生产。
第五章测量误差PPT课件

km
P( km)
1
e
2 2m2
d
km 2 m
将K=1、2、3分别代入上式,可得到偶然误差分别出现在
一倍、二倍、三倍中误差区间内的概率:
P(|| m)=0.683=68.3
P(||2m)=0.954=95.4
P(||3m)=0.997=99.7
测量中,一般取两倍中误差(2m)作为容许误差,也称为限差:
● 测量误差的来源
(1)仪器误差:仪器精度的局限、轴系残余误差等。 (2)人为误差:判断力和分辨率的限制、经验等。 (3)外界条件的影响:温度变化、风、大气折光等
第2页/共34页
2、测量误差的种类及处理方法
测量误差分为:粗差、系统误差和偶然误差
1.粗差(错误)——超限的误差
2.系统误差 —— 误差出现的大小、符号相同,或按
§5.1 测量误差概述
◆测量与观测值 ◆观测与观测值的分类
● 观测条件 ● 等精度观测和不等精度观测 ● 直接观测和间接观测 ● 独立观测和非独立观测
第1页/共34页
§5.1 测量误差概述
1、 测量误差及其来源
● 测量误差(真误差=观测值-真值) l X ● 测量误差的表现形式
l X (观测值与真值之差) ij li l j (观测值与观测值之差)
Z K X
ZZ K 2 XX
除以n 倍函数误差
ZZ K 2 XX
n
n
mZ K mx
例:在1:1000地形图上量得图上距离d=123.456mm, 其误差m d=±0.1mm,则其实地距离D及其误差m D:
D=123.456m 第26页m/共3D4=页±0.1m
三、线性函数
圆度测量
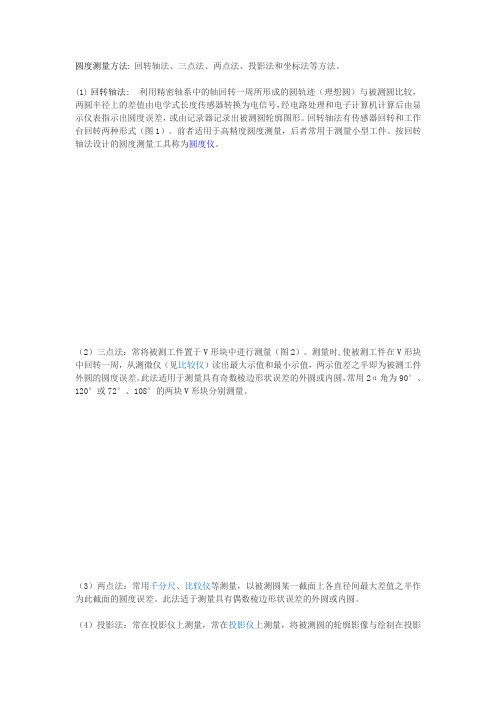
圆度测量方法: 回转轴法、三点法、两点法、投影法和坐标法等方法。
(1)回转轴法: 利用精密轴系中的轴回转一周所形成的圆轨迹(理想圆)与被测圆比较,两圆半径上的差值由电学式长度传感器转换为电信号,经电路处理和电子计算机计算后由显示仪表指示出圆度误差,或由记录器记录出被测圆轮廓图形。
回转轴法有传感器回转和工作台回转两种形式(图1)。
前者适用于高精度圆度测量,后者常用于测量小型工件。
按回转轴法设计的圆度测量工具称为圆度仪。
(2)三点法:常将被测工件置于V形块中进行测量(图2)。
测量时,使被测工件在V形块中回转一周,从测微仪(见比较仪)读出最大示值和最小示值,两示值差之半即为被测工件外圆的圆度误差。
此法适用于测量具有奇数棱边形状误差的外圆或内圆,常用2α角为90°、120°或72°、108°的两块V形块分别测量。
(3)两点法:常用千分尺、比较仪等测量,以被测圆某一截面上各直径间最大差值之半作为此截面的圆度误差。
此法适于测量具有偶数棱边形状误差的外圆或内圆。
(4)投影法:常在投影仪上测量,常在投影仪上测量,将被测圆的轮廓影像与绘制在投影屏上的两极限同心圆(图3)比较,从而得到被测件的圆度误差。
此法适用于测量具有刃口形边缘的小型工件。
(5)坐标法:一般在带有电子计算机的三坐标测量机上测量。
按预先选择的直角坐标系统测量出被测圆上若干点的坐标值x、y,通过电子计算机按所选择的圆度误差评定方法计算出被测圆的圆度误差。
圆度误差评定就是将双绞线导线横截面的实际轮廓与理想圆比较的过程。
圆度误差评定方法:①最小区域法:以包容被测圆轮廓的半径差为最小的两同心圆的半径差作为圆度误差。
②最小二乘圆法:以被测圆轮廓上相应各点至圆周距离的平方和为最小的圆的圆心为圆心,所作包容被测圆轮廓的两同心圆的半径差即为圆度误差。
③最小外接圆法:只适用于外圆。
以包容被测圆轮廓且半径为最小的外接圆圆心为圆心,所作包容被测圆轮廓的两同心圆半径差即为圆度误差。
圆度误差-圆度误差的测量和评定(精)
圆度误差-圆度误差的测量和评定毕业论文摘要:本文介绍、分析和比较了圆度误差的多种测量、评定方法,指出提高测量精度的关键技术是误差分离,评定误差的关键技术是由计算机完成测得数据由测量中心至评定中心的基准转换。
结合教学工作实践,给出了测量实例分析和探讨了1种计算机辅助误差评定的方法。
关键词:圆度误差关键技术基准转换 1 引言圆度误差是指在回转体同1径向截面(即垂直于轴线的截面)内,被测实际圆对其理想圆的变动量,用被测实际轮廓对理想圆圆心的最大半径差表示。
测量和评定圆度误差有多种方法,以适应不同的测量对象和不同的精度要求。
本文拟结合教学工作实践,对圆度误差的测量和评定作相关探讨和分析。
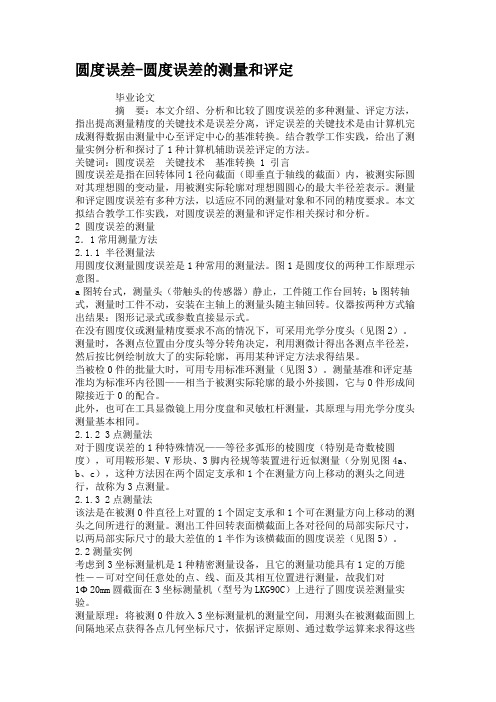
2 圆度误差的测量2.1常用测量方法2.1.1 半径测量法用圆度仪测量圆度误差是1种常用的测量法。
图1是圆度仪的两种工作原理示意图。
a图转台式,测量头(带触头的传感器)静止,工件随工作台回转;b图转轴式,测量时工件不动,安装在主轴上的测量头随主轴回转。
仪器按两种方式输出结果:图形记录式或参数直接显示式。
在没有圆度仪或测量精度要求不高的情况下,可采用光学分度头(见图2)。
测量时,各测点位置由分度头等分转角决定,利用测微计得出各测点半径差,然后按比例绘制放大了的实际轮廓,再用某种评定方法求得结果。
当被检0件的批量大时,可用专用标准环测量(见图3)。
测量基准和评定基准均为标准环内径圆——相当于被测实际轮廓的最小外接圆,它与0件形成间隙接近于0的配合。
此外,也可在工具显微镜上用分度盘和灵敏杠杆测量,其原理与用光学分度头测量基本相同。
2.1.2 3点测量法对于圆度误差的1种特殊情况——等径多弧形的棱圆度(特别是奇数棱圆度),可用鞍形架、V形块、3脚内径规等装置进行近似测量(分别见图4a、b、c),这种方法因在两个固定支承和1个在测量方向上移动的测头之间进行,故称为3点测量。
2.1.3 2点测量法该法是在被测0件直径上对置的1个固定支承和1个可在测量方向上移动的测头之间所进行的测量。
§5—3圆度误差的测量

。
圆度误差
2、几何特性: 径向性:圆度的误差值反映在圆周的半径方向上,故其基本的测量方
法应为“半径法”(依其“周期性”,应为整周连续测量) 。
周期性:圆度误差大小的变化,在圆周方向上周期连续随机变化。故
可将圆的轮廓形状以富氏级数形式表示:
r0 ci sini ai
用指示表的最大与最小读数差来确定工 件的圆度误差值。实际运用中,又分: 正V形法、偏V形法。
指示表的示值S和圆度f圆的关系为 : 图5-31 V形块法 S=Kf圆 式中:K为一系数,又称圆度误差在指示表上的放大倍数。与棱圆数n
、V形块角度值α、指示表测量轴线相对于V形槽对称平面倾斜角β有关。
下图为投影光学分度头
缺点:个别误差
点影响大,误差值 较大,对同样轮廓 截面内接、外切圆 心不同,结果差异 大。
§5-3 圆度误差的测量
主要内容: 1、圆度误差的定义及其几何特性 径向性、周期性 2、测量方法 基本方法:整周连续的圆度仪法
近似法:“二点法”、“三点法”
3、圆度误差的评定 最小包容区域法
最小外接圆法
最大内切圆法 最小二乘圆法
4、四种评定方法的比较
一、圆度误差的定义及其几何特性
1、定义: 圆度误差:指包容同一正截面实际轮廓且半径差为最小的两 同心圆间的距离f圆( f 圆 Rmax Rmin )。 圆度公差带:在同一正截面上半径差为公差值 t的两同心圆
(2)基本形式:
转台式(工作台回转式):性能稳定,适用于测量小型
工件零件。
转轴式<测量轴回转式>:承载能力强,回转精度高
图5-29 圆度仪
(3)测量误差及消除方法
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
❖(2)基本形式: 转台式(工作台回转式):性能稳定,适用于测量小型 工件零件。 转轴式<测量轴回转式>:承载能力强,回转精度高
图5-29 圆度仪
(3)测量误差及消除方法
主轴回转误差,无法消除。
工件安装误差:
安装偏心误差。消除:
采用偏心调整结构。
滤波:消除一次谐波的影响
工件安装倾斜所引起的误差
下图为光学分度头测量原理图
❖ 正V形法和偏V形法的比较: 正V形法:需已知棱圆数n, n未知需用多v法。 偏V形法:对最常出现的棱边数n(3,5,7,9…)有相 同K,故n未知,亦可测量。
2、两点法: 适用于偶数棱的圆度误差的测量
❖ 方法:测量时让工件回转一周,由指示表读出最大差值,取 其一半为圆度误差。
❖ 4.最小二乘圆法:
以实际轮廓上相应各点至圆周距离平方和为最小的圆的圆心为理想圆的 圆心。
图5-32 圆度误差的评定
四、四种评定方法的比较
❖ 最小包容区域法: 符合国家标准规定,评定结果值为最小值,数值唯一, 但中心位置不一定唯一,能最大限度的放过合适品。
❖ 最小二乘圆法: 唯一中心,唯一误差值,结果不易受个别点误差的影响。 但通常采用此法时,要求满足表面连续的条件。
§5-3 圆度误差的测量
主要内容: 1、圆度误差的定义及其几何特性
径向性、周期性 2、测量方法
基本方法:整周连续的圆度仪法 近似法:“二点法”、“三点法” 3、圆度误差的评定
最小包容区域法 最小外接圆法 最大内切圆法 最小二乘圆法 4、四种评定方法的比较Biblioteka 一、圆度误差的定义及其几何特性
1、定义: ❖ 圆度误差:指包容同一正截面实际轮廓且半径差为最小的两
同心圆间的距离f圆( f 圆 Rmax)。Rmin ❖ 圆度公差带:在同一正截面上半径差为公差值 t的两同心圆
之间的区域。
。
圆度误差
2、几何特性: ❖ 径向性:圆度的误差值反映在圆周的半径方向上,故其基本的测量方
法应为“半径法”(依其“周期性”,应为整周连续测量) 。
❖ 周期性:圆度误差大小的变化,在圆周方向上周期连续随机变化。故
❖ 局限性:该方法不能发现奇数棱的圆度误差,测得直径值不 直接体现圆度误差定义。
问1:若无圆度仪,能用整周连续测量法吗?
问2:利用已学过测量设备,设计一圆度误差的测量方法,并估计测量方法误差?
三、圆度误差的评定
❖ 实质即理想圆圆心位置如何确定,实用中有四种评定方法。
❖ 1.最小包容区域法(或称最小半径差法):
用指示表的最大与最小读数差来确定工 件的圆度误差值。实际运用中,又分: 正V形法、偏V形法。
❖ 指示表的示值S和圆度f圆的关系为 :
S=Kf圆
图5-31 V形块法
式中:K为一系数,又称圆度误差在指示表上的放大倍数。与棱圆数n
、V形块角度值α、指示表测量轴线相对于V形槽对称平面倾斜角β有关。
下图为投影光学分度头
提问与解答环节
Questions And Answers
谢谢聆听
·学习就是为了达到一定目的而努力去干, 是为一个目标去 战胜各种困难的过程,这个过程会充满压力、痛苦和挫折
Learning Is To Achieve A Certain Goal And Work Hard, Is A Process To Overcome Various Difficulties For A Goal
包容实际轮廓且半径差为最小的两同心圆的圆心,即理想圆的位置,它 符合最小条件。
判定:由两同心圆包容被测实际轮廓时,至少有四个实测点内外相间地 在两个圆周上,该法亦称“交叉准则”。
❖ 2.最小外接圆法:
以包容实际轮廓且半径为最小的外接圆圆心为理想圆的圆心。
❖ 3.最大内切圆法:
以内切于实际轮廓且半径为最大的内切圆圆心为理想圆的圆心。
可将圆的轮廓形状以富氏级数形式表示:
r0 ci sini ai
式中:ρ(θ)—任一角时向量半径;i r1o—富氏级数常量;ci,ai—富氏系数
❖ 上式意义:
A.可以把轮廓形状看成是由一个平均半径为r0的圆和若干个按不同周 期变化的形状误差波形的叠加。
B.右端和式中每一表达式代表一个谐波分量,反映一定的几何意义。
图5-30 测头安装误差
测头安装误差:测头尽量沿工件直径方向安装
表面粗糙度的影响:用滤波的方法消除。机械 滤波、电路滤波
其他:测头半径,测力等。
(二)简便测量法:
适应在车间中测量一般精度的 工件圆度误差
1、三点法(V型块法)测量
❖ 假设:各种棱圆度都是均匀的。
❖ 方法:将工件放在V形块上,旋转一周,
C.各次谐波依次反映各种边数的棱圆度误差
可采用“两点法”(直径法),“三点法”(V型法)测量。
二、测量方法
❖ 基本测量方法:整周连续测量法—专用圆度仪上测量; ❖ 近似法:“二点法”、“三点法” —用通用量仪测量。 ❖ 其他测量方法:坐标法等 1.圆度仪法:
❖ (1)测量原理:
以高精度的回转中心线为测量基准,利用传感器和被测零 件接触,采用“半径法”动态连续测量不同转角位置上实际 轮廓到回转中心的半径变化量,并以一定的评定方法得出被 测工件的圆度误差。