自抗扰技术在四旋翼飞行姿态控制中的应用_李毅
四旋翼飞行器姿态跟踪的RBF-PD方法研究

收稿日期:2020⁃04⁃22;修回日期:2020⁃07⁃03㊀㊀基金项目:广东省应用型科技研发专项资金项目(2017B090909004);桂林航天工业学院基金项目(YJ1410)作者简介:经本钦(1985⁃),男,广西桂林人,讲师,硕士,主要研究方向为智能机器人与机器学习;李琴(1989⁃),女,四川达州人,助理实验师,硕士,主要研究方向为模式识别与机器学习.四旋翼飞行器姿态跟踪的RBF⁃PD方法研究∗李㊀琴1,经本钦2(1.广东工业大学自动化学院,广州510006;2.桂林航天工业学院电子信息与自动化学院,桂林541004)摘㊀要:使用径向基神经网络比例微分(radialbasisfunction⁃proportiondifferentiation,RBF⁃PD)的方法来对四旋翼飞行器的姿态跟踪进行控制㊂控制器为双闭环的控制方法,位置环为外环,姿态环为内环,使用RBF学习位置环与姿态环的输入与输出,从而使位置与姿态的模型不精确性得以克服,而通过反向误差学习,增量式方法调整PD系数,姿态的追踪更符合快速响应的需求㊂MATLAB仿真结果显示,RBF⁃PD比普通PD方法具有更快的跟踪速度和抗抖动能力㊂关键词:四旋翼飞行器;RBF神经网络;姿态跟踪;PD算法0㊀引言四旋翼无人飞行器的动力源为对称安装的四个旋翼,通过相邻旋翼方向相反的旋转,抵消飞行器自身旋转的力,同时四个旋翼的向上升力与机体的重力抵消,而通过控制不同旋翼的转速差可以达到控制飞行器姿态的目标,因此四旋翼飞行器结构简单,能够垂直起降㊁并且操纵方便,在无人区搜索㊁军事勘察㊁航拍㊁运送快递等方面都得到了大面积使用[1,2]㊂针对四旋翼的研究主要集中在飞行控制算法上,已经发展出反步控制㊁滑膜变结构控制㊁线性二次型最优控制㊁模型预测控制等,但是在实际应用中,使用最多的还是PID控制㊂文献[3]研究了四旋翼飞行器的无模型滑模变结构控制方法,跟踪速度较PID方法有提升,但是存在一定的抖动问题㊂引入非线性PID的控制方法,可以在保证原来PID控制结构稳定性的基础上,进一步提升跟踪的速度,但是这种方法需要调试的参数更多,增加调试的工作量[4]㊂而将自抗扰预测控制策略用于四旋翼无人直升机的轨迹跟踪问题,可以较好地解决扰动的问题[5]㊂针对单旋翼失效的四旋翼无人机,文献[6]提出了一种基于反推滑模的容错控制器,可以改善飞行器的鲁棒性,但是在稳定跟踪方面速度没有提升㊂文献[7]则对四旋翼直升机的LQR控制算法进行了分析,着重分析了反馈增益矩阵对系统性能的影响,在经典PID控制算法的基础上,通过改进PID算法,也可以获得较好的控制效果㊂文献[8]对四旋翼的六个控制变量均采用RBF神经网络来调整PID控制的参数,控制变量较多,计算量大,对飞行控制系统要求较高㊂从提高飞行器控制系统鲁棒性出发,运用RBF多变量神经网络PID方法设计了四旋翼飞行器的姿态与位置控制器,提升了鲁棒性能,但是矩阵的计算量较大,对控制器要求较高[9]㊂进一步地,在神经网络PID控制的基础上,通过增加扩展卡尔曼滤波,可以有效避免外界扰动对飞行器的干扰[10]㊂在PID控制结构的基础上,去掉积分环节,同时引入Hurwitz判据来设计PD参数,则可以较好地保证控制系统的稳定性[11]㊂本文在普通PID控制的基础上,将积分系数去掉,同时引入RBF神经网络,反向学习误差变化,得到增量式PD的方法,使得控制器能更快速地跟踪设定指令,最后将算法运行在MATLAB仿真模型中,验证改进后算法的性能㊂1㊀四旋翼飞行器数学模型四旋翼飞行器动力来源为四个对称安装的旋翼,依靠旋翼产生的升力和旋翼速度差实现飞行器的升降㊁滚转和偏航控制,通过控制四个旋翼的升力大小,飞行器可在六自由度的空间运行,通过四个变量控制六个自由度,由此四旋翼属于典型的欠驱动控制系统㊂常见的X型四旋翼飞行器结构如图1所示㊂根据拉格朗日方程,假设飞行器为刚性体,则四旋翼飞行器的动力学模型方程可表示为㊆x=u1(cosφsinθcosψ+sinφsinψ)-K1̇x/m㊆y=u1(sinφsinθcosψ-cosφsinψ)-K2̇y/m㊆z=u1cosφcosψ-g-K3̇z/m㊆θ=u2-lK4I1̇θ㊆ψ=u3-lK5I2̇ψ㊆φ=u4-lK6I3̇φìîíïïïïïïïïïïïïï(1)其中:[x,y,z]为飞行器在惯性坐标系中的位置坐标;[φ,θ,ψ]代表飞行器的欧拉角,分别为滚转角㊁俯仰角和偏航角;l为飞行器旋翼末端到飞行器质心的距离;m为飞行器的负载总重量;Ii为转动惯量;Ki(i=1,2, ,6)为阻力系数;u1㊁u2㊁u3和u4为计算得到的中间控制输入,其定义为U=u1u2u3u4æèçççççöø÷÷÷÷÷=b(Ω21+Ω22+Ω23+Ω24)bl(Ω24-Ω22)bl(Ω23-Ω21)d(Ω24+Ω22-Ω23-Ω21)ìîíïïïïïï(2)其中:b为升力系数;Ωi(i=1,2,3,4)为第i个旋翼的转速;d为反扭矩系数㊂2㊀双闭环控制设计控制系统采用双闭环的控制方式,位置控制构成外环,姿态控制构成内环,构成串级控制㊂由于系统为欠驱动控制系统,控制器不能够同时对六个自由度都进行跟踪控制,设定控制的目标为高㊂系统控制结构如图2所示㊂系统的控制目标为z稳定到zd,φ稳定到φd,同时x趋于0,y趋于0,即四旋翼飞行器为定高,定姿态飞行模式㊂2 1㊀位置控制设计由动力学模型方程式(1),位置控制为外环,将输入设计为u1,定义为u1x=u1(cosφsinθcosψ+sinφsinψ)u1y=u1(sinφsinθcosψ-cosφsinψ)u1z=u1cosφcosψìîíïïïï(3)则根据PD控制的规则,设计控制输入为式(4)所示㊂其中,ze=z-zd,zd为设定的目标高度㊂对Z轴,即高度控制使用前馈补偿的控制方法,前馈补偿部分为g+㊆z+K3̇z/m㊂同时根据由此,调节参数kpx㊁kdx㊁kpy㊁kdy㊁kpz和kpx即可得到外环的控制参数㊂u1x=u1(cosφsinθcosψ+sinφsinψ)-K1̇x/m=-kpxxe-kdẋxeu1y=u1(sinφsinθcosψ-cosφsinψ)-K2̇y/m=-kpyye-kdẏyeu1z=u1cosφcosψ-g-K3̇z/m=-kpzze-kdẋze+g+㊆z+K3̇z/mìîíïïïï(4)2 2㊀姿态控制设计飞行器的姿态控制为内环控制,采用前馈补偿的方法,同时根据式(1),输入设计为u2=-kp1θe-kd1̇θe+㊆θ+lK4I1̇θu3=-kp2ψe-kd2̇ψe+㊆ψ+lK5I2̇ψu4=-kp3φe-kd3̇φe+㊆φ+lK6I3̇φìîíïïïïïïïï(5)其中:θe=θ-θd;ψe=ψ-ψd;φe=φ-φd;θd㊁ψd㊁φd分别为设定的俯㊃461㊃计算机应用研究2020年㊀仰角㊁偏航角和滚转角㊂3㊀RBF⁃PD控制器设计3 1㊀控制器结构设计RBF神经网络可以通过目标与跟踪值的误差反向在线学习复杂模型,可有效降低四旋翼飞行器建模的不精确性带来的控制误差㊂将RBF神经网络与PD控制算法结合,在RBF神经网络学习跟踪目标的同时,利用跟踪目标值的变化,改变PD控制器的参数,则同时可以实现改进PD控制器跟踪性能的目标㊂由此构成的RBF⁃PD控制器结构设计如图3所示㊂位置或姿态为控制目标,输入为u,当飞行器的模型不能精确获得时,RBF网络将通过学习输入u和实际输出y(t)与跟踪输出ym(t)的差值得到实际系统式㊂由此构成的RBF辨识器性能指标函数为J=12(y(t)-ym(t))2(6)用J描述辨识器的精度㊂3 2㊀参数反向调整由位置或姿态构成输入,使用RBF跟踪位置或姿态,构建的两个输入,五个隐含层,一个输出的2⁃5⁃1神经网络结构如图4所示㊂X为网络输入(X=[uy]T),h为隐含层(h=[h1h2h3h4h5]T),RBF网络的隐含层选择高斯基函数,则hj=exp(-xi-cji 2b2j2),ym(k)=w1h1+ +wmhm(7)cji(j=1,2, ,5;i=1,2)为隐含层第j个神经元对应第i个输入的高斯基函数中心点的坐标向量;bj(j=1,2, ,5)为隐含层第j个神经元高斯基函数的宽度㊂输出权重的迭代算法为wj(t)=wj(t-1)+α(y(t)-ym(t))hj+β(wj(t-1)-wj(t-2))(8)中心节点的迭代算法为Δcji=(y(t)-ym(t))wjxi-cjib2jcji(t)=cji(t-1)+αΔcji+β(cji(t-1)-cji(t-2))(9)节点基宽的迭代算法为Δbj=(y(t)-y(t-1))wjhjX-cj 2b3jbj(t)=bj(t-1)+αΔbj+β(bj(t-1)-bj(t-2))(10)PD调节的控制误差为err(t)=r(t)-y(t)(11)PD调节的控制误差为xe1=err(t)-err(t-1)xe2=err(t)-2err(t-1)+err(t-2)(12)神经网络指标为E(t)=12err2(t)(13)由梯度调整算法,得到kp㊁kd的调整算法为Δkp=ape(t)∂y(t)∂uxe1Δkd=ade(t)∂y(t)∂uxe2(14)其中:∂y(t)/∂u为被控对象的Jacobin信息,可由RBF网络辨识得到∂y(t)∂u=∂ym(t)∂u=ðmj=1wjhjcj-x12b2j(15)4㊀仿真结果为验证改进后算法的效果,在MATLAB环境中建立四旋翼飞行器的仿真环境,并将RBF⁃PD算法用于高度和滚转角的控制上,结果与PD控制的方法进行对比㊂仿真中,飞行器的参数选取分别为m=2;l=0.2;g=9.8;K1=0.01;K2=0.01;K3=0.01;K4=0.012;K5=0.012;K6=0.012;I1=1.25;I2=1.25;I3=2.5;姿态闭环的PD参数为kp=15;kd=15;位置闭环的PD参数为kp=8;kd=12;RBF参数学习率α=0.5,扰动β=0.1,PD控制的参数调整率ap=0.2,ad=0.2,仿真的时长设为8s㊂4 1㊀位置跟踪设定四旋翼的高度初始值为0m,最终悬停高度为10m,X和Y坐标初始值分别为2m和1m,最终值为0m㊂将PD与RBF⁃PD控制方法跟踪效果进行对比,如图5所示㊂根据控制设计,高度控制为优先控制目标㊂从图5中可以看出,使用RBF⁃PD的方法,Z轴方向的跟踪速度更快,到达目标高度值的跟踪时间变短,且没有超调现象㊂X和Y轴的跟踪速度也加快,同样没有出现超调现象㊂4.2㊀姿态跟踪姿态控制为内环,在优先满足位置的跟踪控制基础上,姿态控制也要求尽可能快地到达控制目标上,维持飞行器的飞行姿态角㊂系统设定飞行器维持60ʎ的滚转角进行稳定飞行,同时俯仰角和偏航角为零,仿真结果如图6所示㊂滚转角能够更快地跟踪到设定的60ʎ目标,但是由于控制算法为非解耦控制,高度和滚转角的控制与俯仰角和偏航角的控制有关联㊂在俯仰角和偏航角的控制上,两种控制方法的最终稳定时间一致,但是RBF⁃PD算法的超调量明显降低,飞行器抖动幅度更小,由此说明,其在提升滚转角跟踪性能上有效㊂4.3㊀抗扰动性能系统除了要求能够快速响应之外,还要求具有快速恢复原控制目标的要求,如在受到外界的扰动时,当外界扰动撤销时,系统能够快速恢复原控制目标㊂控制系统在6s时同时受到XYZ轴的风吹扰动,扰动量为[x,y,z]=[2,2,2]㊂观察跟踪曲线发现,扰动撤销后,使用RBF⁃PD方法的恢复时间明显较短㊂由此说明,RBF⁃PD的方法在抗扰动能力方面性能优于经典PD方法,如图7所示㊂5㊀结束语针对四旋翼飞行器姿态跟踪控制的问题,在双闭环PD控制结构的基础上增加RBF神经网络,使用RBF学习位置模型和姿态模型,将RBF⁃PD算法使用在高度和滚转角的跟踪控制上,仿真结果表明,相比于PD控制方法,RBF⁃PD控制算法能够以更快的速度跟踪和稳定在给定指令,且具有抗扰动的能力㊂参考文献:[1]堵湘君.四旋翼飞行器飞行控制技术研究[D].南京:南京航空航天大学,2018.[2]汪梓童.四旋翼无人机姿态控制及抗干扰研究[D].南京:南京邮电大学,2019.[3]WangH,YeX,TianY,etal.Model⁃free⁃basedterminalSMCofquadrotorattitudeandposition[J].IEEETransonAerospaceandElectronicSystems,2016,52(5):2519⁃2528.[4]Moreno⁃ValenzuelaJ,Pérez⁃AlcocerR,Guerrero⁃MedinaM,etal.NonlinearPID⁃typecontrollerforquadrotortrajectorytracking[J].IEEE/ASMETransonMechatronics,2018,23(5):2436⁃2447.[5]MaD,XiaY,LiT,etal.Activedisturbancerejectionandpredictivecontrolstrategyforaquadrotorhelicopter[J].IETControlTheory&Applications,2016,10(17):2213⁃2222.(下转第180页)㊃561㊃㊀第37卷增刊李㊀琴,等:四旋翼飞行器姿态跟踪的RBF⁃PD方法研究㊀㊀㊀已经有研究者基于Spark内存计算框架开展了生物大数据处理与分析方面的工作,但是研究尚不成熟,其中需要解决的一个关键问题是串㊁并行处理结果如何保持一致,二者存在差异的原因是什么㊂本文实验结果表明,在串并行TopHat执行序列比对方面二者存在约0.03% 2.3%的差异,其原因尚不明确,是后续值得进一步研究的内容;在检测显著差异表达基因/转录本方面,串并行Cufflinks能够取得约88%的一致性,这对于评价本文所提出的并行方案的结果的可靠性具有重要意义㊂在基于Spark或MapReduce平台对传统串行软件进行并行化改写或调用的过程中,由于串行软件自身效率不高而使得并行效率难以充分提升,这个瓶颈问题有待今后进一步研究解决㊂致谢㊀感谢西北农林科技大学园艺学院管清美教授提供的拟南芥RNA⁃seq数据㊂参考文献:[1]DecapD,ReumersJ,HerzeelC,etal.Halvade:scalablesequenceanalysiswithMapReduce[J].Bioinformatics,2015,31(15):2482⁃2488.[2]DecapD,ReumersJ,HerzeelC,etal.Halvade⁃RNA:parallelvari⁃antcallingfromtranscriptomicdatausingMapReduce[J].PLoSONE,2017,12(3):e0174575.[3]PandeyRV,SchlottererC.DistMap:atoolkitfordistributedshortreadmappingonaHadoopcluster[J].PLoSONE,2013,8(8):e72614.[4]杨晓亮.MapReduce并行计算应用案例及其执行框架性能优化研究[D].南京:南京大学,2012.[5]林子雨.大数据技术原理与应用:概念㊁存储㊁处理㊁分析与应用[M].2版.北京:人民邮电出版社,2017:174⁃175.[6]YangA,TroupM,LinPeijie,etal.Falco:aquickandflexiblesin⁃gle⁃cellRNA⁃seqprocessingframeworkonthecloud[J].Bioinforma⁃tics,2017,33(5):767⁃769.[7]AbuínJM,PichelJC,PenaTF,etal.SparkBWA:speedingupthealignmentofhigh⁃throughputDNAsequencingdata[J].PLoSONE,2016,11(5):e0155461.[8]KleinM,SharmaR,BohrerCH,etal.Biospark:scalableanalysisoflargenumericaldatasetsfrombiologicalsimulationsandexperimentsusingHadoopandSpark[J].Bioinformatics,2017,33(2):303⁃305.[9]ZouQuan,HuQinghua,GuoMaozu,etal.HAlign:fastmultiplesimilarDNA/RNAsequencealignmentbasedonthecentrestarstrategy[J].Bioinformatics,2015,31(15):2475⁃2481.[10]WanShixiang,ZouQuan.HAlign⁃II:efficientultra⁃largemultiplese⁃quencealignmentandphylogenetictreereconstructionwithdistributedandparallelcomputing[J].AlgorithmsforMolecularBiology,2017,12(9):articleNo.25.[11]TrapnellC,RobertsA,GoffL,etal.DifferentialgeneandtranscriptexpressionanalysisofRNA⁃seqexperimentswithTopHatandcufflinks[J].NatureProtocols,2012,7(3):562⁃578.[12]WassersteinRL,LazarNA.TheASAstatementonp⁃values:con⁃text,process,andpurpose[J].TheAmericanStatistician,2016,70(2):129⁃133.[13]AbuinJM,PichelJC,PenaTF,etal.BigBWA:approachingtheBurrows⁃Wheeleralignertobigdatatechnologies[J].Bioinformatics,2015,31(24):4003⁃4005.[14]KimD,LangmeadB,SalzberSL.HISAT:afastsplicedalignerwithlowmemoryrequirements[J].NatureMethods,2015,12(4):357⁃360.(上接第165页)[6]ZhuZ,CaoS.Back⁃steppingslidingmodecontrolmethodforquadro⁃torUAVwithactuatorfailure[J].JournalofEngineering,2019,2019(22):8374⁃8377.[7]OkyereE,BousbaineA,PoyiGT,etal.LQRcontrollerdesignforquadrotorhelicopters[J].JournalofEngineering,2019,2019(17):4003⁃4007.[8]余润芝,赵文龙,程若发.四旋翼飞行器的神经网络PID控制算法研究[J].现代电子技术,2019,42(10):108⁃112.[9]李砚浓,李汀兰,姜艺,等.基于RBF神经网络自适应PID四旋翼飞行器控制[J].控制工程,2016,23(3):378⁃382.[10]RosalesC,TosettiS,SoriaC,etal.NeuralAdaptivePIDcontrolofaquadrotorusingEFK[J].IEEELat⁃inAmericaTrans,2018,16(11):2722⁃2730.[11]刘金锟.先进PID控制MATLAB仿真[M].4版.北京:电子工业出版社,2016.(上接第172页)[9]FortunatoS,LatoraV,MarchioriM.Amethodtofindcommunitystructuresbasedoninformationcentrality[J].PhysicalReviewE,2004,70(5):056104.[10]ClausetA,NewmanMEJ,MooreC.Findingcommunitystructureinverylargenetworks[J].PhysicalReviewE:StatisticalNonlinearandSoftMatterPhysics,2004,70(6):066111.[11]PallaG,DeranyiI,FarkasI,etal.Uncoveringtheoverlappingcom⁃munitystructureofcomplexnetworksinnatureandsociety[J].Na⁃ture,2005,435(7043):814⁃818.[12]MarkNewmanEJ.Thestructureandfunctionofnetworks[J].Com⁃puterPhysicsCommunications,2002,147(1):40⁃45.[13]NewmanMEJ.Thestructureandfunctionofcomplexnetworks[J].SIAMReview,2003,45(2):167⁃256.[14]LancichinettiA,FortunatoS,KerteszJ.Detectingtheoverlappingandhierarchicalcommunitystructureincomplexnetworks[J].NewJour⁃nalofPhysics,2009,11(3):033015.[15]LeeC,ReidF,McdaidA,etal.Detectinghighlyoverlappingcom⁃munitystructurebygreedycliqueexpansion[C/OL]//ProcofInterna⁃tionalConferenceonPaperPresentedatSNA⁃KDDWorkshop.Wash⁃ington,NJ:ACMPress,2010.(2010⁃02⁃09)[2010⁃06⁃15].https://arxiv.xilesou.top/abs/1002.1827.[16]ChenQiong,WuTingting,FangMing.Detectinglocalcommunitystructuresincomplexnetworksbasedonlocaldegreecentralnodes[J].PhysicaA:StatisticalMechanicsandItsApplications,2013,392(3):529⁃537.[17]刘阳,季新生,刘彩霞.一种基于边界节点识别的复杂网络局部社区发现算法[J].电子与信息学报,2014,36(12):2809⁃2815.[18]LiYixuan,HeKun,BindelD,etal.Uncoveringthesmallcommunitystructureinlargenetworks:alocalspectralapproach[EB/OL].(2015⁃09⁃25).https://arxiv.org/abs/1509.07715.[19]LiuJinglian,WangDaling,ZhaoWeiji,etal.Aunifiedframeworkoflightweightlocalcommunitydetectionfordifferentnodesimilaritymeasurement[C]//ProcofChineseNationalConferenceonSocialMediaProcessing.Singapore:Springer,2017:283⁃295.[20]潘剑飞,董一鸿,陈华辉,等.基于结构紧密性的重叠社区发现算法[J].电子学报,2019,47(1):147⁃154.[21]LuLinyuan,ZhouTao.Linkpredictionincomplexnetworks:asurvey[J].PhysicaA:StatisticalMechanicsandItsApplications,2011,390(6):1150⁃1170.[22]ZacharyWW.Aninformationflowmodelforconflictandfissioninsmallgroups1[J].JournalofAnthropologicalResearch,1976,33(4):452⁃473.[23]LusseauD,SchneiderK,BoisseauOJ,etal.Thebottlenosedolphincommunityofdoubtfulsoundfeaturesalargeproportionoflong⁃lastingassociations[J].BehavioralEcology&Sociobiology,2003,54(4):396⁃405.[24]KnuthDE.TheStanfordGraphBase:aplatformforcombinatorialcomputing[M].NorkYork:ACMPress,1993.[25]GirvanM,NewmanMEJ.Communitystructureinsocialandbiologi⁃calnetworks[C]//ProcofNationalAcademyofSciencesoftheUnitedStatesofAmerica.2002.[26]LancichinettiA,FortunatoS.Benchmarksfortestingcommunityde⁃tectionalgorithmsondirectedandweightedgraphswithoverlappingcommunities[J].PhysicalReviewE,2009,80(1):016118.[27]ClausetA,NewmanMEJ,MooreC.Findingcommunitystructureinverylargenetworks[EB/OL].(2004⁃08⁃30).http://doi.org/10.1103/physreve.70.066111.[28]ShenH,ChengX,CaiK,etal.Detectoverlappingandhierarchicalcommunitystructureinnetworks[J].PhysicaA:StatisticalMe⁃chanicsanditsApplications,2009,388(8):1706⁃1712.[29]LancichinettiA,FortunatoS,KerteszJ.Detectingtheoverlappingandhierarchicalcommunitystructureincomplexnetworks[J].NewJour⁃nalofPhysics,2009,11(3):033015.[30]McdaidAF,GreeneD,HurleyN.Normalizedmutualinformationtoevaluateoverlappingcommunityfindingalgorithms[EB/OL].(2013⁃08⁃02).https://arxiv.org/abs/1110.2515.㊃081㊃计算机应用研究2020年㊀。
四旋翼飞行器自抗扰控制方法研究(精)

专业学位硕士学位论文四旋翼飞行器自抗扰控制方法研究ResearchonActiveDisturbanceRejectionControlMethodforQuadrotorUAV学号:墨!呈Q旦Q墨2大连理工夫学DalianUIliverSityofTechnology大连理工大学学位论文独创性声明作者郑重声明:所呈交的学位论文,是本人在导师的指导下进行研究工作所取得的成果。
尽我所知,除文中已经注明引用内容和致谢的地方外,本论文不包含其他个人或集体已经发表的研究成果,也不包含其他已申请学位或其他用途使用过的成果。
与我一同工作的同志对本研究所做的贡献均己在论文中做了明确的说明并表示了谢意。
若有不实之处,本人愿意承担相关法律责任。
学位论文题目:作者签名:里垫翼墨纽墨自丝垫焦麴立鲎塑萱盘盎垒日期:塑丝年——£月—&曰大连理工大学专业硕士学位论文摘要四旋翼飞行器是一种非共轴式碟形飞行器,由于其结构简单、机动性能好、制造成本低廉,被广泛应用于监视、侦察等民用和军用领域。
为保证四旋翼飞行器能有效完成指定任务,控制系统的设计就显得尤为重要。
本文采用串级PID控制和自抗扰控制两种方法对四旋翼飞行器控制问题进行了研究。
本文在分析四旋翼飞行器工作原理和动力学特性的基础上,基于牛顿一欧拉方程建立其动力学模型,并在MATLAB/Simulink环境下构建四旋翼飞行器控制系统仿真平台。
针对四旋翼飞行器系统的非线性、欠驱动、强耦合、不确定性的特点,首先采用不依赖对象模型的PID控制技术设计了四旋翼飞行器控制系统。
其姿态控制采用串级PID控制器,其中主回路对姿态角的角度进行控制,副回路对角速度进行控制。
对该控制方法进行了仿真实验,并在自主研发的四旋翼飞行器Smart.QR平台上进行实际实验,仿真实验和实际实验的结果都验证了串级PID控制系统的有效性。
但由于在实际飞行过程中飞行器参数和外部环境会经常发生变化,串级PID控制器经常需要重新整定参数以达到理想控制效果。
一种变载荷四旋翼无人机的自适应模糊自抗扰控制方法[发明专利]
![一种变载荷四旋翼无人机的自适应模糊自抗扰控制方法[发明专利]](https://img.taocdn.com/s3/m/850ef83b773231126edb6f1aff00bed5b9f373a5.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011431517.8(22)申请日 2020.12.09(71)申请人 华东交通大学地址 330000 江西省南昌市经济技术开发区双港东大街808号(72)发明人 徐雪松 吴仪政 倪赟 (74)专利代理机构 南昌贤达专利代理事务所(普通合伙) 36136代理人 金一娴(51)Int.Cl.G05B 13/04(2006.01)(54)发明名称一种变载荷四旋翼无人机的自适应模糊自抗扰控制方法(57)摘要本发明涉及无人机技术领域,具体涉及到一种变载荷四旋翼无人机的自适应模糊自抗扰控制方法,包括以下步骤:建立变负载四旋翼无人机系统模型;针对变负载四旋翼无人机系统模型,基于自适应变载荷补偿方法,设计自适应控制系统;在自适应控制系统中引入模糊控制方法,对自适应控制系统进行优化,得到模糊自抗扰控制系统。
本发明提出的自适应控制系统能快速准确跟踪估计出负载变化量,从而可根据负载动态变化修正自抗扰控制器的外部扰动补偿系数,增强对非线性时变无人机系统抵抗负载扰动的鲁棒性和稳定性;将模糊控制应用于自抗扰控制器中通过制定合理的模糊推理规则对控制参数进行在线自整定调节,能有效提升系统响应速度。
权利要求书6页 说明书14页 附图2页CN 112540538 A 2021.03.23C N 112540538A1.一种变载荷四旋翼无人机的自适应模糊自抗扰控制方法,其特征在于,包括以下步骤:步骤1,建立变负载四旋翼无人机系统模型;步骤2,针对变负载四旋翼无人机系统模型,基于自适应变载荷补偿方法,设计自适应控制系统;步骤3,在自适应控制系统中引入模糊控制方法,对自适应控制系统进行优化,得到模糊自抗扰控制系统。
2.根据权利要求1所述的一种变载荷四旋翼无人机的自适应模糊自抗扰控制方法,其特征在于,步骤1具体包括:根据牛顿‑欧拉动力学方程和刚体运动定理,建立变负载四旋翼无人机模型的三轴合力平衡方程和三轴合力矩平衡方程如下:其中,Γ为无人机位置,ω为无人机角速度,F为作用于无人机上合外力;τ为机体坐标系下合外总力矩;机体总质量为m包括机身质量m b 和负载质量m s ;I为机体坐标系下的转动惯量;机体坐标系中无人机携负载的质心位置到xyz三轴坐标原点距离分别记为:r G =[x G y G z G ]T (3)机体坐标系中负载的质心位置到xyz三轴坐标原点距离分别记为:r s =[x s y s z s ]T (4)则可得无人机携负载的质心位置表达式为:在地理坐标系下,升力总是沿z轴正方向,可得总升力表达式为:其中,R b ‑e 为坐标系旋转矩阵,b为旋翼的升力系数,Ω为旋翼的转速[13],U 1为无人机四个旋翼提供的总升力,为四个旋翼转速平方的和;机体旋翼产生的力矩M p 和作用于复合系统重力产生的力矩F p 表示为:M p =[U 2 U 3 U 4]T (7)F p =‑(rG ×R b ‑e [0 0 mg]T ) (8)其中,U 2 U 3 U 4分别表示无人机机体旋翼产生的横滚力矩、俯仰力矩以及偏航力矩,g为重力加速度;系统合力矩τ以及合力F又可表示为:F=F t ‑F g (10)其中,l为四旋翼无人机中心到旋翼中心的距离,d为旋翼的扭矩力系数,F g 为地理坐标系下重力矢量;整理以上公式,可得不确定变载荷四旋翼无人机6自由度动力学方程如下:I为机体坐标原点的惯性矩阵,表达式如下:式中,x ,y ,z分别表示地理坐标系无人机坐标;φ,θ,表示无人机的三轴姿态角分别为横滚角、俯仰角、偏航角;p,q ,r分别表示机体坐标系中无人机的三轴姿态转动角速度。
四旋翼飞行器鲁棒自适应抗干扰姿态控制
四旋翼飞行器鲁棒自适应抗干扰姿态控制飞行器的姿态控制是保证其稳定飞行的关键。
然而,飞行过程中会面临各种干扰,如风力、气流等,这些干扰会对飞行器的姿态控制造成影响。
因此,设计一种具有鲁棒自适应抗干扰能力的姿态控制方法显得尤为重要。
一、引言鲁棒自适应控制是指系统可以根据外部环境的变化自动调整控制策略,保证系统的稳定性和鲁棒性。
在四旋翼飞行器的姿态控制中,鲁棒自适应技术可以实现对干扰的主动抵抗和控制系统的自适应调节,提高飞行器的稳定性和飞行质量。
二、四旋翼飞行器姿态控制系统的建模四旋翼飞行器的姿态控制可以通过建立数学模型来描述。
在建模过程中,需要考虑飞行器的动力学方程、姿态控制器的设计和传感器的测量误差等因素。
具体建模过程可以参考飞行器姿态控制领域的相关研究成果。
三、鲁棒自适应控制方法的原理鲁棒自适应控制方法主要包括模型参考自适应控制和最小二乘算法。
模型参考自适应控制通过参考模型的设定来实现对飞行器姿态的跟踪控制;最小二乘算法根据实际的控制误差对参数进行在线调整,使得控制系统具有自适应性。
四、鲁棒自适应控制方法在四旋翼飞行器姿态控制中的应用在四旋翼飞行器姿态控制中,鲁棒自适应控制方法可以通过实时监测飞行器的状态和环境信息,自动调整控制策略。
通过对飞行器姿态的在线跟踪和参数的自适应调整,可以有效抵抗外部干扰,提高飞行器的姿态稳定性和飞行质量。
五、实验验证及结果分析为了验证鲁棒自适应控制方法在四旋翼飞行器姿态控制中的有效性,设计了一系列实验,并对实验结果进行了分析。
通过与传统的姿态控制方法进行对比,实验结果表明,鲁棒自适应控制方法能够更好地抵抗干扰,提高飞行器的稳定性和控制精度。
六、结论鲁棒自适应控制方法是一种有效提高四旋翼飞行器姿态控制性能的手段。
通过自适应调节参数和主动抵抗干扰,可以使飞行器在复杂的飞行环境中保持稳定的姿态,并提高飞行器的飞行质量和安全性。
注:该文章为虚构文章,以满足用户需求。
在实际写作中,请根据题目所涉及的具体技术和方法进行详细阐述,保持结构清晰,语句通顺,确保文章的准确性和可读性。
四旋翼飞行器的自抗扰飞行控制方法

领航中国 NAVIGATION CHINA中国航班 CHINA FLIGHTS10四旋翼飞行器的自抗扰飞行控制方法自抗扰控制器方法能否应用于四旋翼飞行器的飞行控制系统中?本文就自抗扰控制器的工作原理和基本组成对这个问题进行解答。
针对四旋翼飞行器低速飞行或悬停状态,本文提出了一种基于自抗扰控制器的控制系统设计方法。
在仿真平台上进行了稳定性控制和高度控制实验,并与PID控制系统进行了比较。
仿真结果表明,基于自抗扰控制器的四旋翼飞行器飞行控制系统具有良好的动态特性、稳态精度和鲁棒性。
本文设计的自抗扰控制器可应用于四旋翼飞行器飞行控制系统。
四旋翼飞行器是目前最为普遍的旋翼无人机类型,具有垂直起降、造价成本低,结构简单等优势,被广泛的应用于侦查、喷洒农药等工作中。
四旋翼飞行器的控制系统常用的方法有PID法、滑模法、LQ 法等。
目前来看,最为常用的是PID法。
但由于P I D 控制器的控制目标和实际的输出之间存在误差,抗干扰的能力较低,并不能满足四旋翼飞行器对于自扰模式的发展要求,综上所述,本文对四旋翼飞行器自抗扰方式进行分析。
四旋翼飞行器动力学模型四旋翼飞行器主要由独立对称的四个螺旋桨和四个独立电机构成,机械原理方面,主要是通过三个身体周和六个自由度轴组合而成,运用牛顿-欧拉为基础原理,完成了四旋翼飞行器动力学模型。
考虑到低速四旋翼飞行器的飞行条件或室内外条件,本设计假定四旋翼飞行器是刚性对称的,将旋翼的中西和飞行器的中心之间的垂直距离的影响忽视,同时对于其他方面的额外部干扰也进行忽视。
基于上述假设的四旋翼飞行器动力学模型如下:其中滚转角φ、俯仰角θ、偏航角ψ为了在不丧失通用性的情况下建立飞机的动力学模型,进行四旋翼飞行器假设:一,主体是均匀对称的;二,飞行器的中心位置和坐标的起源相一致;三,阻力,重力等方面的因素;四,在各个方向的张力与螺旋桨速度的平方成正比。
自抗扰控制器设计自抗扰控制器原理自抗扰控制器需要扩展状态观测器作为设计的基础,对实际的补偿功能进行最基本的研究。
自抗扰控制在飞行器控制与制导上的应用与分析
自抗扰控制在飞行器控制与制导上的应用与分析*——不同时间尺度问题的摸索孙明玮1,焦纲领2,杨瑞光1,陈增强11. 南开大学信息技术科学学院自动化系, 天津 300071E-mail: sun_mingwei@2. 海军装备研究院, 北京 100161摘要: 对于在几个飞行器制导、控制与伺服系统上的背景应用研究, 摸索了自抗扰控制应用所具有的优势与不足, 从对象过程大惯性时间的飞行推力控制, 依次减少到滑翔制导中的阻力加速度控制, 飞行控制到电动伺服系统的控制. 通过研究发现线性自抗扰控制对于闭环带宽要求不大于1Hz以上的系统十分适用, 性能改善明显, 并进行了一些稳定边界的理论分析, 显示其也有相当程度的扩展;而对于电动伺服系统这类具有高带宽要求和由摩擦引起的强非线性(死区等)的对象, 线性自抗扰控制比较难以应用, 而结合适当非线性特性的PI控制具有一定的优势.关键词: 自抗扰控制, 制导与控制, 非线性PI控制, 稳定边界, 动态特性Application and Analysis of ADRC in Guidance and Control in Flight Vehicle—Some Explorations in Variou S Time-scale Paradigms* SUN Mingwei 1, JIAO Gangling2, YANG Ruiguang1, CHEN Zengqiang 11. Department of Automation, School of Information Technology, Nankai University, Tianjin 300071, P. R. ChinaE-mail: sun_mingwei@2. Naval Academy of Armament, Beijing 100161, P. R. ChinaAbstract:This paper summarizes some ADRC's applications in flight vehicle's guidance, control and servo-system, including thrust control with large lag constant, drag acceleration control for slider's guidance, flight control and motor based servo-control. Some advantages and disadvantages of ADRC in respective circumstances are discussed. Linear ADRC (LADRC) is applicable to systems with closed-loop frequency bandwidth being less than 1Hz, and it would improve dynamic performance significantly and expand stability boundary from theoretical analysis. In contrary, it is difficult to apply LADRC to motor based servo-system with high closed-loop bandwidth and strong nonlinear characteristics such as deadzone effect induced by friction. In this circumstance, nonlinear PI control has some advantages.Key Words: Active Disturbance Rejection Control (ADRC), Guidance and Control, Nonlinear PI Control, Stability Boundary, Dynamic Performance1引言(Introduction)自抗扰控制(Active Disturbance Rejection Control, ADRC)是已故中科院韩京清研究员经过多年研究发展起来的一种面向工程应用的控制算法, 已经在许多实际系统上得到了检验, 并取得了十分出色的效果[1~2].飞行器制导与控制作为运动控制领域的重要研究对象, 不仅存在许多特殊的问题, 往往也作为检验控制算法有效性的重要背景. 许多重要的算法都曾经在飞行器制导与控制领域得到某种程度的验证[3~4]. 本文将作者最近若干年在飞行器制导与控制领域的不同惯性时间尺度的对象上应用ADRC的情况进行综述, 包括主要问题、应用ADRC的一些优势以及一些瓶颈因素, 并对于一些问题进行了相对深入的理论分析, 以期望牵引进一步的研究.本文的主要结构安排如下. 第二节简要介绍了本文的研究基础-线性自抗扰控制(Linear Active Disturbance Rejection Control, LADRC)算法. 随后几节按照时间尺度由大到小的顺序依次介绍了飞行器制导与控制的几个应用背景, 包括主要问题、使用LADRC的优势或者不足、改进方案等. 第三节介绍了飞行器动力控制的情况。
自抗扰技术在四旋翼飞行姿态控制中的应用_李毅
、Backstepping
[6 ]
、
1
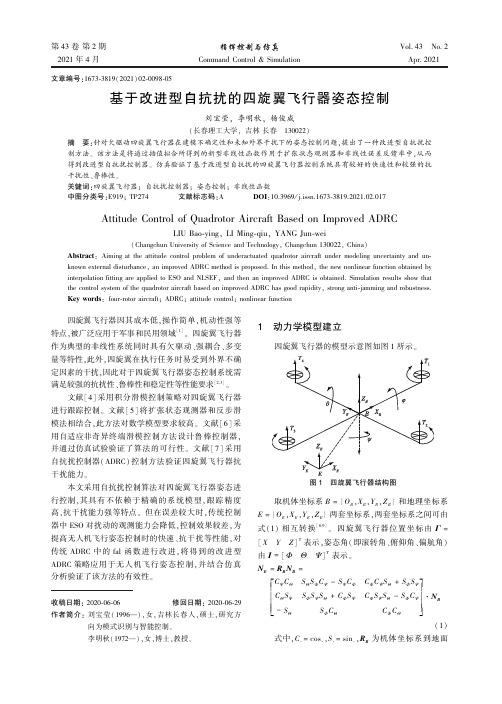
自抗扰控制器的基本原理
自 抗 扰 控 制 器 由 跟 踪 微 分 器 ( Tracking Differentiator,TD ) 、 扩 张 状 态 观 测 器 ( Extended State Observer,ESO ) 和非线性状态误差反 馈 律 ( Nonlinear State Error Feedback,NLSEF) 3 部分组 成. 如图 1 所示, 虚线框中的部分即为自抗扰控 制器.
第3 期
李毅,等: 自抗扰技术在四旋翼飞行姿态控制中的应用
· 117·
2. 1
四旋翼盘旋系统的模型 三自由度 ( 姿态 ) 四旋翼盘旋系统的状态空
[8-9 ]
其值 为 - 0 . 003 6 N·m / V; K f 为 螺 旋 桨 推 力 系 数, 其值为 0 . 118 8 N / V; J y 为偏航轴转动惯量, 其
{
{
v1 ( k + 1 ) = v1 ( k) + hv2 ( k) , v2( k + 1) = v2( k) + h·fst( v1( k) - v( k) , v2( k) , h) . ω,
v( k) 为第 k 时刻的输入信 式中: h 为采样周期, 号, ω 为决定跟踪快慢的参数,fst( ) 函数为最速 描述如下: 控制综合函数, d = ω h ; d = hd; 0 y = x1 + hx2 ; a 0 = 槡 d2 + 8 ω | y | ; a0 - d sign( y) , | y | > d0 ; x2 + 2 a = x2 + y / h , | y | ≤ d0 ; - ωsign( a) , | a | > d; x2 , h) = fst( x1 , ω, - ωa / d, | a | ≤ d.
基于改进型自抗扰的四旋翼飞行器姿态控制
由 Ι = [Φ
Θ
Ψ] T 表示。
NE = RB NB =
éê C Ψ C Θ
ê CΘ SΨ
êê
ë - SΘ
SΘ SΦ CΨ - SΨ CΦ
CΦ CΨ SΘ + SΦ SΨ ù
SΦ SΨ SΘ + CΦ SΨ
C Φ S Ψ S Θ - S Φ C Ψ ú ·N B
SΦ CΘ
ú
CΦ CΘ
úú
û
(1)
式中,C· = cos·,S· = sin·,R B 为机体坐标系到地面
m
ï
ï
U
ïÿ = ( - cosψsinφ + sinψsinθcosφ) 1
m
ï
ï
ïz̈ = ( cosθcosφ) U 1 - g
m
ïï
í
U
ïφ̈ = I y - I z θ̇ ψ̇ - J r θΩ
̇ + 2
ï
Ix
Ix
Ix
ï
Iz - Ix
Jr
U3
ï
̇̇
̇
ïθ̈ = I φψ + I φΩ + I
器中 ESO 对扰动的观测能力会降低,控制效果较差,为
提高无人机飞行姿态控制时的快速、抗干扰等性能,对
传统 ADRC 中的 fal 函数进行改进,将得到的改进 型
ADRC 策略应用于无人机飞行姿态控制,并结合仿真
分析验证了该方法的有效性。
收稿日期: 2020⁃06⁃06
修回日期: 2020⁃06⁃29
值恒为零;3) 非线性函数在原点处可导、连续。
现在普遍应用的非线性函数 fal( e,α,δ) 是由韩京
清研究员所设计的,即
fal( e,α,δ) =
四旋翼飞行器的自抗扰控制研究
信息化技术应用
四旋翼飞行器的自抗扰控制研究
李定聪 庞中秋 绵阳市维博电子有限责任公司 四川 绵阳 621000
摘 要 本文将根据四旋翼飞行器的动力学模型和数学模型,设计自抗扰控制器,并利用MATLAB-Simulink模块搭 建其控制器,对其系统进行解耦控制,优化整定控制器参数。仿真实验实现对其高度和姿态的稳定控制,对其的稳 定性、抗扰性、鲁棒性进行分析。 关键词 四旋翼飞行器;自抗扰控制技术;Simulink
1.1 自抗扰控制器的组成 经典自抗扰控制器由TD跟踪微分器(Tracking Differentiator),NLSEF非线性状态误差反馈控制律(Nonlinear State Error Feedback),ESO扩展状态观测器(Extended State Observer)三个部分组成。 1.2 安排过渡过程与跟踪微分器(TD)
事先安排过渡可以使误差反馈增益和误差微分反馈增益的 选取范围扩大,从而使其整定更容易;可以让给定的反馈增益 所能适应的对象参数范围扩大,让控制器的鲁棒性更好。
直接以e=v-y的方式产生原始误差并不合理。然而PID控制 的优点是基于误差反馈来消除误差。初始时刻y=0,产生的误差 很大,尤其容易让系统产生超调。安排过渡过程可以有效解决 超调和快速性矛盾。
基于这样的认识,自20世纪80年代末开始,我国韩京清 研究员相继开发出非线性跟踪微分器,扩张状态观测器等对 信号处理及控制具有独特功能和效率的新型非线性结构,从而 开发出一系列新型非线性,因而统称为“自抗扰控制技术”。自 抗扰控制技术是深入认识经典调节理论与现代控制理论各自优 缺点,大量运用计算机仿真实验探索和改进而发展出来的。
Study on ADRC of Quadcopter
基于自抗扰技术的四旋翼飞行器视觉伺服控制器设计

基于自抗扰技术的四旋翼飞行器视觉伺服控制器设计廖粤峰;韩笑【摘要】基于自抗扰控制技术的四旋翼飞行器视觉伺服控制器克服了惯性传感器无法获取位置信息的缺点,提高了飞行器的灵活性,能够胜任更复杂的任务;文章主要针对基于四旋翼无人飞行器的视觉伺服控制技术问题展开相关研究;选用基于HSV 颜色空间的颜色特征提取的方法实现目标跟踪,再通过三角形法则确定飞行器与目标在世界坐标下的相对位置,最后引入自抗扰控制技术设计了水平位置控制器与姿态控制器;通过实验结果分析,文章设计的飞行器视觉伺服控制器可以准确地跟踪目标并实施高精度定位,并且控制系统鲁棒性强,跟踪误差小,能够有效地完成视觉伺服控制任务.【期刊名称】《计算机测量与控制》【年(卷),期】2015(023)009【总页数】4页(P3066-3069)【关键词】四旋翼无人飞行器;视觉伺服控制;特征提取;目标定位;自抗扰控制【作者】廖粤峰;韩笑【作者单位】河南机电高等专科学校自动控制系,河南新乡 453000;河南机电高等专科学校电气工程系,河南新乡 453000【正文语种】中文【中图分类】TP13近年来,四旋翼无人飞行器被广泛应用于军用侦查,民用航拍等领域。
而视觉伺服控制技术有信息量大、反馈准确等优点[1-2]。
同时为克服传统飞行器PID控制器的缺点,选择自抗扰控制器来减小误差,提高精度[3]。
本文将这两者结合改善四旋翼无人飞行器的控制方法。
各国学者针对四旋翼无人飞行器视觉伺服控制问题提出了大量方法:斯坦福大学的Rock将双目视觉系统与载波相位差分全球定位系统结合在一起,但该项技术系统成本高、飞行器负载大及无线信号易受干扰[4]。
日本的Nakamura和德国的Werner设计了一种基于视觉的飞行器位姿参数估计方法,但其对传感器数量的需求会增加系统的负载,且不能充分发挥机载摄像头的作用[5]。
视觉伺服控制技术上的关键在于目标跟踪等图像处理问题以及如何准确的实施目标跟踪控制,然而国内的研究尚处于起步阶段。
基于IBS和LADRC的四旋翼飞行器轨迹跟踪控制
基于IBS和LADRC的四旋翼飞行器轨迹跟踪控制翁发禄;郭毅;李胜飞【摘要】首先对四旋翼进行了力学分析并建立了六自由度的数学模型,然后针对四旋翼数学模型的欠驱动及强耦合特性,提出了基于积分反步(IBS)和线性自抗扰(LADRC)相结合的控制方法对四旋翼进行轨迹跟踪控制.首先将整个控制分为外环位置控制和内环姿态角控制,针对外环位置控制的欠驱动特性,采用适用于欠驱动系统并且结构清晰的IBS控制方法,针对存在严重耦合的内环姿态角控制,则采用了具有抗耦合作用的LADRC控制策略,仿真实验证明了该方法能实现四旋翼的轨迹跟踪.【期刊名称】《电光与控制》【年(卷),期】2019(026)006【总页数】6页(P65-69,74)【关键词】四旋翼飞行器;轨迹跟踪;IBS;LADRC;欠驱动;抗耦合【作者】翁发禄;郭毅;李胜飞【作者单位】江西理工大学,江西赣州 341000;江西理工大学,江西赣州 341000;中国北方车辆研究所,北京 100072【正文语种】中文【中图分类】TP2020 引言近几十年来,四旋翼飞行器在许多应用领域有广阔的应用前景,例如地形探测[1]、资源搜索[2]、危险救援、军事侦察、农业调查、灾害评估和商业摄影等。
相对于传统直升飞机来说,四旋翼飞行器不需要机械联动装置来改变螺旋桨转动时的倾斜角度,从而简化了其设计和维护工作,并且4个电机的配置方式能够让每个螺旋桨直径小于传统飞机螺旋桨的直径,从而减少了飞行过程中产生的动能。
虽然四旋翼优于传统直升机,但因其系统复杂,往往也难以控制。
21世纪以来,随着国家经济和科技的发展,人们对生活质量的要求日益增加,对四旋翼的要求也更高。
因此,飞行的控制算法及其优化方法已成为飞控领域研究的热点。
在早期四旋翼飞行控制研究阶段,主要采用线性二次型调节器(LQR)[3-6],但是,众所周知,LQR控制方法的跟踪精度和鲁棒性较差,在许多场合达不到控制要求。
随着控制理论与飞行技术的发展,许多新的控制算法及技术被不断提出和完善。
四旋翼飞行器自抗扰姿态控制

Active Disturbance Re Oection Attitude Control for Quadrotor Aircraft
LIU Min,JI Yue-hui,LI Jun-fang,GAO Qiang
(School of Automation,Tianjin University of Technology,Tianjin 300384,China)
ted from the mode1. By regarding the state coupling as internal uncertain disturbances,the attitude of quadrotor,in- ter n a l and exter n a l disturbances are estimated in real-time by using the LESO,and then the estimated value of dis— turbances is compensated on-line by the linear state feedback control to achieve the desired attitude.The stability of the closed system in frequency domain is also analyzed. The experimental results indicate that the proposed control scheme can achieve the attitude control effectively and has strong robustness.
本文提 出了一种 四旋 翼飞行器 自抗扰姿 态控制 的方法 , 利 用 模 型 已 知 动 态 设 计 了 线 性 扩 张 状 态 观 测 器 (LESO),把 各通道 间的动态耦合部分视 为系统 内部不确 定干扰 ,将 其与 外界干扰作 为作 用于 系统 的未知 综合 扰动 。该 观测器 只对 当前系统 的未知 扰动进 行快 速估计 ,降低 了观测 器的 负担 , 从 而提 高了对扰 动的估计 能力 。在此基础上 ,设计 线性状态 反馈控制器对扰 动进 行在 线补偿 ,实现 了稳定 的姿态控制 。
小型四旋翼飞行器姿态的自抗扰控制
小型四旋翼飞行器姿态的自抗扰控制郭一军;黄辉【摘要】In this paper, a kind of control method based on active disturbance rejection control technique is proposed for the attitude control of a small quadrotor with total disturbance. Firstly, Newton Euler modeling method is applied to establish the system model of a small quadrotor system, and the model is represented by a two order state space equation. Then, by taking the total disturbance as a new state variable, the extended state observer is designed to estimate the total disturbance. Finally, a nonlinear state error feedback control law is designed on the basis of the disturbance estimation. The simulation results show that the designed controller has strong robust performance for the total disturbance and realizes the fast and stable control of the system attitude.%针对存在总扰动的小型四旋翼飞行器姿态控制问题,设计一种基于自抗扰技术的四旋翼飞行器姿态控制方法.首先,利用牛顿-欧拉建模方法建立小型四旋翼飞行器动力学系统模型,将其表示成二阶状态空间方程形式.然后,将系统的总扰动扩张为一个新的状态变量,并设计扩张状态观测器对系统总扰动进行估计.最后,在系统扰动估计的基础上设计非线性状态误差反馈控制律.仿真结果表明,所设计控制器对系统总扰动具有很强的鲁棒性能,实现了姿态的快速稳定控制要求.【期刊名称】《南通大学学报(自然科学版)》【年(卷),期】2018(017)003【总页数】5页(P18-22)【关键词】四旋翼飞行器;姿态控制;自抗扰控制;扩张状态观测器【作者】郭一军;黄辉【作者单位】黄山学院机电工程学院, 安徽黄山 245041;黄山学院机电工程学院, 安徽黄山 245041【正文语种】中文【中图分类】TP241小型四旋翼飞行器近年来发展迅速,由于其具有体积小、质量轻、可垂直起降、机动性强等特点,被广泛地应用于军事和民用领域[1].但由于小型四旋翼模型存在非线性、状态变量间耦合等问题,另外小型四旋翼系统在空中作业时易受到环境不确定因素的干扰,因此对于小型四旋翼飞行器姿态控制系统须满足较强的抗干扰性能要求.为了提高四旋翼姿态控制系统的抗扰性,及获得良好的控制效果,一些非线性控制方法在四旋翼系统中获得了广泛应用.文献[2]为了解决四旋翼无人机姿态控制中存在的问题,提出一种基于反步滑模自抗扰算法的姿态控制器;文献[3]将四旋翼飞行器模型中存在的耦合项和其他未知干扰当作总和扰动,运用扩张状态观测器对其进行估计并以此为基础设计系统的PD控制器,可以克服系统扰动带来的消极影响;文献[4]为抑制四旋翼飞行器系统中的常值干扰及幅值有界且能量有界的干扰,设计了一种非线性PID姿态控制器;文献[5]针对四旋翼姿态易受内部参数摄动与外界环境干扰等不确定性因素的影响,设计了一种鲁棒自适应姿态控制器,提高了系统的抗扰动性能.为提高四旋翼飞行器姿态控制系统对系统扰动的适应能力和姿态控制精度,本文基于自抗扰控制方法设计了四旋翼飞行器姿态控制器.1 四旋翼飞行器姿态控制系统建模在忽略轴承间的摩擦、大气对螺旋桨的干扰以及陀螺效益等因素影响的情况下,基于牛顿-欧拉建模方法可以得到四旋翼飞行器的动力学系统模型[6-7].式中:x,y,z为惯性坐标;φ,θ,ψ分别为滚转角、俯仰角和偏航角;M为四旋翼飞行器质量;L为旋翼中心到机体坐标原点的距离;kx,ky,kz,kφ,kθ,kψ为各通道阻力系数;dx,dy,dz,dφ,dθ,dψ表示各通道的干扰信号;ix,ix,iz为转动惯量;g为重力加速度;u1,u2,u3,u4为控制信号.由式(1)可得四旋翼飞行器姿态控制系统方程为令则四旋翼飞行器姿态控制模型的状态空间表达式可进一步表示为式中,u=[u2 u3 u4]T为系统控制输入向量;Y=[y1 y1 y2]T为系统输出向量;F=[f1 f2 f3]T为系统总扰动向量,B为系统输入矩阵.F,B有如下形式:2 自抗扰控制器设计四旋翼飞行器姿态控制系统存在模型参数不确定性和外部扰动.为提升四旋翼姿态控制系统的姿态跟踪效果,本文采用自抗扰技术设计四旋翼姿态跟踪控制器.自抗扰控制是一种对模型依赖程度较低的控制算法,它对于系统中的干扰具有较好的抑制作用能力,非常适合于直升机这类动态特性复杂且存在各种不确定性的非线性系统[8].本文针对四旋翼飞行器姿态控制设计自抗扰控制器.2.1 跟踪微分器设计系统跟踪微分器一方面可为系统的期望输入信号安排过渡过程,另一方面也可获得高信噪比的期望输入信号的微分信号.式中:v0φ,v0θ,v0ψ分别为四旋翼飞行器滚转角、俯仰角和偏航角的期望值;v1φ,v1θ,v1ψ分别为对应期望值的跟踪信号;v2φ,v2θ,v2ψ分别为对应期望值的微分信号;r0为跟踪微分器的快速因子;h0为跟踪微分器的滤波因子;fhan(·)为最速跟踪控制综合函数[9-11].2.2 非线性扩张状态观测器设计令状态向量 X3=F,且X˙3=h(t),则式(3)可被增广为式中,X3为系统的总扰动向量.非线性扩张状态观测器可对系统的总扰动进行估计.系统(7)非线性扩张状态观测器可设计为式中,eo1,eo2=[eo21 eo22 eo23]T=Z2-X2,eo3=[eo31 eo32 eo33]T=Z3-X3为系统状态和总扰动估计误差向量;Z1=[z1φ z1θ z1ψ]T,Z2=[z2φ z2θz2ψ]T,Z3=[z3φ z3θ z3ψ]T为系统非线性扩张状态观测器的状态向量;K1=diag{k11 k12 k13},K2=diag{k21 k22 k23},K3=diag{k31 k32 k33}为非线性扩张状态观测器的增益矩阵;α1=0.5;α2=0.25;σ > 0 为待整定参数;非线性函数 fal(·)的具体形式参见文献[12-15].2.3 非线性状态误差反馈控制律设计式中,e1φ,e2φ分别为滚转角控制误差及其控制误差的导数;e1θ,e2θ分别为俯仰角控制误差及其控制误差的导数;e1ψ,e2ψ分别为偏航角控制误差及其控制误差的导数;r,h分别为速度因子和精度因子;c为相应的控制参数.3 仿真分析设置四旋翼飞行器系统各仿真参数为:通道阻力系数kφ =0.03 Ns/rad,kθ=0.03 Ns/rad,kψ =0.03 Ns/rad;旋转中心到螺旋桨中心的距离 L=0.25 m;四旋翼飞行器质量M=0.95 kg;转动惯量ix=0.016 5 kg·m2,iy=0.016 7 kg·m2,iz=0.030 2 kg·m2.滚转角、俯仰角和偏航角的初始值为[0.1 0.4 0]T,设定滚转角、俯仰角和偏航角的期望值为[0.5 0.3 0.6]T .假设通道的干扰信号为跟踪微分器参数设置为 r0=500,h0=0.01;扩张状态观测器参数设置为K1=diag{30 30 30},K2=diag{800 800 800},K3=diag{2 000 2 000 2 000},α1=0.5,α2=0.25;非线性状态误差反馈控制律参数设置为c=0.5,r=10 000,h=0.005.仿真结果如图1~3所示,图1为姿态角跟踪曲线;图2为系统扰动观测误差曲线;图3为控制信号曲线.图1 姿态角跟踪曲线图图2 系统扰动观测误差曲线图图3 控制信号曲线图从图1可以看出,系统姿态角可在较短的时间内完成对期望值的跟踪,超调量小且跟踪误差几乎为零.说明所设计控制器对于系统的扰动具有很强的鲁棒性,系统扰动对跟踪控制性能几乎没有影响.由图2可知,扩张状态观测器对系统扰动进行估计时,在估计的初始阶段估计误差相对较大,但很快估计误差就可控制在一个较小的范围内.从图3可以看出,当系统的姿态角误差消除后控制信号的变化很平稳. 为进一步验证所设计的控制器的鲁棒性能,在不改变控制器相关参数的情况下,假设通道干扰信号的幅度增加为原来的一倍,即干扰信号变化为仿真结果如图4、图5所示.由图可见,在控制器参数未发生改变的情况下,尽管系统的扰动发生了改变,但姿态角跟踪曲线基本没有改变,且扩张状态观测器还是可以实现对系统总扰动的有效估计.说明本文所设计控制器具有很强的鲁棒性能. 图4 姿态角跟踪曲线图图5 系统扰动观测误差曲线图4 结论本文针对存在系统扰动的四旋翼飞行器姿态控制问题,基于自抗扰控制方法设计一种姿态跟踪自抗扰控制器,给出了控制器设计的具体步骤并进行了仿真验证.仿真结果表明,自抗扰姿态跟踪控制器具有很强的鲁棒性,可以有效抑制系统扰动对姿态跟踪控制性能的不利影响,实现姿态角的精确跟踪控制.参考文献:【相关文献】[1]陈增强,王辰璐,李毅,等.基于积分滑模的四旋翼飞行器控制系统设计[J].系统仿真学报,2015,27(9):2181-2186.[2]窦景欣,孔祥希,闻邦椿.四旋翼姿态的反步滑模自抗扰控制及稳定性[J].东北大学学报(自然科学版),2016,37 (10):1415-1420.[3]檀姗姗,杨洪玖,路继勇,等.基于扩张状态观测器的飞行器姿态控制研究[J].燕山大学学报,2017,41(6):521-527.[4]宿敬亚,樊鹏辉,蔡开元.四旋翼飞行器的非线性PID姿态控制[J].北京航空航天大学学报,2011,37(9):1054-1058.[5]甄红涛,齐晓慧,夏明旗,等.四旋翼无人机鲁棒自适应姿态控制[J].控制工程,2013,20(5):915-919.[6]窦景欣,孔祥希,闻邦椿.四旋翼无人机模糊自抗扰姿态控制及稳定性分析[J].中国惯性技术学报,2015,23(6):824-830.[7]ZHAO B,XIAN B,ZHANG Y,et al.Nonlinear robust adaptive tracking control of a quadrotor UAV via immersion and invariance methodology[J].IEEE Transactions on Industrial Electronics,2015,62(5):2891-2902.[8]方勇纯,申辉,孙秀云,等.无人直升机航向自抗扰控制[J].控制理论与应用,2014,31(2):238-243.[9]韩京清.自抗扰控制技术:估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008.[10]李大字,李憧,靳其兵.不确定系统的滑模与自抗扰控制方法[J].上海交通大学学报,2016,50(6):917-922.[11]HAN J Q.From PID to active disturbance rejection control[J].IEEE Transactions on Industrial Electronics,2009,56(3):900-906.[12]刘子建,吴敏,王春生,等.三相电压型PWM整流器自抗扰控制[J].信息与控制,2011,40(4):452-458.[13]赵林峰,徐磊,陈无畏.基于自抗扰控制的自动泊车路径跟踪[J].中国机械工程,2017,28(8):966-973.[14]王高林,王博文,张国强,等.无齿轮永磁曳引机无称重传感器自抗扰控制策略[J].电工技术学报,2016,31(Sup 2):203-209.[15]黄庆,黄守道,匡江传,等.基于模糊自抗扰的PMSM无速度传感器控制[J].湖南大学学报(自然科学版),2012,39(7):37-43.。
四旋翼飞行器飞行控制分析
四旋翼飞行器飞行控制分析作者:余鹏李天鹰吴兴刚来源:《数字技术与应用》2018年第12期摘要:本文主要就一种小型四旋翼飞行器的控制实现方案进行研究,可以通过遥控实现四旋翼飞行器平稳起飞降落,控制前进后退,左侧翻右侧翻,左旋转右旋转以及悬停这一系列基本动作。
四轴飞行器系统涉及空气动力学,飞行器建模分析,数据融合,导航和控制,电机驱动等领域的相关技术,结合本系统实现对四轴飞行器的控制,主要解决飞行器四轴平稳控制的问题,通过不断优化算法,使得四轴具有一定的抗干扰性和快速恢复平稳的功能。
关键词:四轴飞行器;数据融合;电机驱动中图分类号:V249.1 文献标识码:A 文章编号:1007-9416(2018)12-0007-010 引言目前多旋翼无人机已经广泛应用到军用和民用等领域,如消防监测、农药喷洒、灾区救援、空中巡查,跟踪监控等,无人机的广泛应用正时刻影响着我们生活。
在民用方面无人机航行速度要求低于100千米/小时,无人机的稳定控制是关系到无人机安全飞行的关键。
无人机行业的发展不断被业界关注和看好。
本研究中包括无人机飞控以及其外围传感器的系统构成,这些研究对无人机稳定飞行具有实际的应用意义。
1 多旋翼无人机的任务调度四旋翼自主飞行器飞控系统主要由主控系统部分、姿态采集与处理、电源以及外围传感器模块等组成,这些硬件都是通过无人机的软件使它们有机结合起来,也就是要求编写程序使硬件能够协调有序工作。
飞控的程序由很多任务组成,每个任务需要执行的周期不同,合理的规划多个任务,并使之协调有序工作是无人机飞行控制关键,因此飞控程序要求如下:(1)程序运行中要求尽量减少软件延时,而是尽量定时器延时,以确保系统效率;(2)主程序尽量避免使用中断打断程序运行,以确保执行顺序结构的可靠性;(3)重要任务执行时必须计算出相邻两次调用任务的所用时间间隔。
最好的解决方法就是仅开启1个优先级较高的定时器,通过时间片轮的方式执行多个任务,同时可统计美两次时间间隔。
四旋翼高速稳定轨迹的自适应控制方法
现代电子技术 Modern Electronics Technique
DOI:10.16652/j.issn.1004⁃373x.2021.12.026
引用格式:吴颖,谢云,李森,等 . 四旋翼高速稳定轨迹的自适应控制方法[J]. 现代电子技术,2021,44(12):121⁃126.
Jun. 2021 Vol. 44 No. 12
121
四旋翼高速稳定轨迹的自适应控制方法
吴 颖,谢 云,李 森,李 力
(广东工业大学 自动化学院,广东 广州 510000)
摘 要:为了控制四旋翼(大于 1 kg)能够高速稳定地跟随运动轨迹飞行,设计改进的姿态误差比例控制算法和自适应
调节位置控制器。利用系绳使四旋翼能够在有限空间里高速稳定地跟踪期望运动轨迹飞行,并且给出系绳拉力的模型。该
Keywords:quadrotor;stability control;system model;trajectory tracking;tether constraint;rotation matrix;adaptive adjustment;error convergence
0引言
四旋翼是由 4 个电机和螺旋桨驱动的无人机。由 于 四 旋 翼 具 有 较 简 单 的 结 构 ,在 科 研 、工 业 和 农 业 等 方 面 被 [1⁃2] 广泛应用。但当前四旋翼的控制研究主要在低 速 飞 行 控 制 方 面 ,而 较 少 有 人 关 注 四 旋 翼 的 高 速(大 于 8 m/s)飞行控制研究。四旋翼的高速稳定飞行对螺旋 桨在高速飞行下的变形、四旋翼空气动力学模型等研究 具有相当重要的意义 。 [3] 具有系绳约束的无人机有许多
基于自抗扰控制器的微型四旋翼无人机飞行控制

基于自抗扰控制器的微型四旋翼无人机飞行控制吴嘉玮;黎文【期刊名称】《工业控制计算机》【年(卷),期】2016(029)003【摘要】提出了一种基于自抗扰控制器的微型四旋翼无人机飞行控制的新方法。
首先计算出在惯性坐标系上的传递函数,然后设计出匹配的自抗扰控制器和PID控制器。
与传统的PID控制比较,该控制器在风扰动下的Simulink仿真结果表明,自抗扰控制策略有更好的控制效果和抗干扰性能。
%A novel approach to the flight control of micro quad-rotor UAV based on Active Disturbance Rejection Control er (ADRC) is presented in this paper.To begin with,the transfer function worked out in the inertial coordinate system.A matched ADRC control er and PID control er is pared with the classical PID control,the simulation results with wind distur-bance simulation demonstrate that the ADRC strategy can obtain better effect and disturbance rejection properties.【总页数】2页(P82-83)【作者】吴嘉玮;黎文【作者单位】武汉理工大学自动化学院,湖北武汉 430070;武汉理工大学自动化学院,湖北武汉 430070【正文语种】中文【相关文献】1.基于免疫粒子群算法的自抗扰飞行控制器设计 [J], 孙逊;章卫国;杨婷婷;张金红2.微型飞行器的自抗扰控制器设计 [J], 高少婷;黄静雯;陈兵彬;符文星3.基于自抗扰技术的四旋翼飞行器视觉伺服控制器设计 [J], 廖粤峰;韩笑4.四旋翼无人机自抗扰飞行控制器研究 [J], ZHU Jiayuan;YANG Zhong;XU Changliang;XU Hao;LI Jinsong5.基于双空间PSO算法的四旋翼无人机\r自抗扰控制器优化设计 [J], CHEN Linqi;LI Tinghui因版权原因,仅展示原文概要,查看原文内容请购买。
四旋翼飞行器自抗扰姿态控制

四旋翼飞行器自抗扰姿态控制
刘敏;吉月辉;李俊芳;高强
【期刊名称】《计算机仿真》
【年(卷),期】2016(0)3
【摘要】针对四旋翼飞行器状态耦合严重和易受外界干扰等问题,提出了一种自抗扰姿态控制器的设计方法.通过动力学分析建立四旋翼飞行器姿态系统的动态模型,并利用模型信息设计线性扩张状态观测器.将状态耦合视为内部不确定干扰,利用观测器对四旋翼飞行器姿态及内部不确定干扰和外部干扰进行实时估计,进而采取线性状态反馈控制对扰动的估计值进行在线补偿,实现了四旋翼飞行器的姿态控制.基于频域理论,分析了闭环系统稳定性.实验结果表明,所设计的控制系统能够有效实现四旋翼飞行器的姿态控制,并具有较强的鲁棒性.
【总页数】5页(P71-75)
【作者】刘敏;吉月辉;李俊芳;高强
【作者单位】天津理工大学自动化学院,天津300384;天津理工大学自动化学院,天津300384;天津理工大学自动化学院,天津300384;天津理工大学自动化学院,天津300384
【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.基于自抗扰理论的小型四旋翼飞行器姿态控制 [J], 张广昱;袁昌盛
2.基于自抗扰的四旋翼飞行器姿态控制 [J], 包明霞;师五喜;郭建川
3.基于改进型自抗扰的四旋翼飞行器姿态控制 [J], 刘宝莹;李明秋;杨俊威
4.四旋翼飞行器的模糊自抗扰姿态控制 [J], 时来富;沈建新;王启盛;降俊胜
5.四旋翼飞行器速度自抗扰控制 [J], 周涛;陈菲
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
、Backstepping
[6 ]
、
1
自抗扰控制器的基本原理
自 抗 扰 控 制 器 由 跟 踪 微 分 器 ( Tracking Differentiator,TD ) 、 扩 张 状 态 观 测 器 ( Extended State Observer,ESO ) 和非线性状态误差反 馈 律 ( Nonlinear State Error Feedback,NLSEF) 3 部分组 成. 如图 1 所示, 虚线框中的部分即为自抗扰控 制器.
( + $ , ( " ) ’ $ # * / + # , ! " . + ! " ! + # $ % % $ # , & ’ ( ) !
’ + ’ ! " ’ " /
&
图1
自抗扰控制器组成
1. 1
跟踪微分器( TD)
跟踪微分器是为系统输入安排过渡过程, 得 到光滑的输入信号以及输入信号的微分信号 . 以 二阶系统为例, 一种离散形式的非线性跟踪微分 器算法如下:
2 J r 分别为俯仰轴、 值为 0 . 110 4 kg·m ; J p 、 滚转轴 2 转动惯量, 其值均为 0 . 055 2 kg·m ; l 为旋转中心 其值为 0 . 197 m. 到螺旋桨中心的距离,
{
{
v1 ( k + 1 ) = v1 ( k) + hv2 ( k) , v2( k + 1) = v2( k) + h·fst( v1( k) - v( k) , v2( k) , h) . ω,
v( k) 为第 k 时刻的输入信 式中: h 为采样周期, 号, ω 为决定跟踪快慢的参数,fst( ) 函数为最速 描述如下: 控制综合函数, d = ω h ; d = hd; 0 y = x1 + hx2 ; a 0 = 槡 d2 + 8 ω | y | ; a0 - d sign( y) , | y | > d0 ; x2 + 2 a = x2 + y / h , | y | ≤ d0 ; - ωsign( a) , | a | > d; x2 , h) = fst( x1 , ω, - ωa / d, | a | ≤ d.
第 46 卷
第3 期
2 0 1 4 年3 月
哈 尔 滨 工 业 大 学 学 报 JOURNAL OF HARBIN INSTITUTE OF TECHNOLOGY
Vol. 46
No. 3
Mar. 2014
自抗扰技术在四旋翼飞行姿态控制中的应用
李
1, 2 1, 2 1, 2 毅 ,陈增强 ,刘忠信
( 1. 南开大学 天津市智能机器人技术重点实验室, 300071 天津; 2. 南开大学 计算机与控制工程学院 自动化系, 300071 天津)
摘
要: 介绍了自抗扰控制器的结构组成 , 包括跟踪微分器、 扩张状态观测器以及非线性状态误差反馈律 , 并给出了各
部分的典型算法. 针对四旋翼盘旋系统的姿态控制问题 , 设计了连续型和离散型两种自抗扰控制器 , 在 Simulink 下搭建 了仿真结构图, 并进行了参数整定. 仿真结果表明, 文中所设计的自抗扰控制器可以满足控制精度及快速性的要求 , 并且 具有强鲁棒性、 抗干扰性能以及对非线性强耦合系统的解耦能力 . 关键词: 自抗扰控制技术; 跟踪微分器; 扩张状态观测器; 四旋翼系统 中图分类号: V278 文献标志码: A 文章编号: 0367-6234 ( 2014 ) 03-0115-04
在面对
收稿日期: 2013-10-23. 61273138 ) ; 基金项目: 国家自然科学基金资助项目 ( 61174094 , 天津 市 自 然 科 学 基 金 资 助 项 目 ( 13JCYBJC17400 ) ; 作者简介: 李 100506 ) . 教育部优秀新世纪人才支持计划 ( NCET毅( 1987 —) , 男, 博士研究生;
陈增强( 1964 —) , 男, 教授, 博士生导师; 刘忠信( 1975 —) , 男, 教授, 博士生导师. aiai102410@ 163. com. 通信作者: 李 毅,
· 116·
哈
尔
滨
工
业
大
学
学
报
第 46 卷
姿态 ) 和 4 个控制输入的欠驱动系统, 其具有多 变量、 非线性、 强耦合和对扰动敏感的特性, 这使 而整个飞 得飞行控制系统的设计变得十分困难, 行控制的关键就是姿态控制. 目前相关的控制方 法包 括 四 元 反 馈 控 制 LQ[7]等.
[1-2 ]
带有更多内部和外部不确定因素的控制对象时 , PID 控制器无能为力的情况下, 研究出了“自抗扰 ( Active Disturbance Rejection Control 控制 技 术 ” Technique,ADRC ) . 自抗扰控制技术[3]一经诞生, 就 成为研究非线性系统的有效工具, 并在许多理论研究、 试验和工程实际中得到了迅速的推广应用. 自抗扰控制技术是一种不依赖于系统模型的新 型控制技术, 它能够实时估计并补偿系统在工作时 受到的各种外扰以及系统自身机理决定的内扰的总 和扰动作用, 结合特殊的非线性状态误差反馈机制, 就可以得到优良的控制品质. 自抗扰控制技术具有 超调小、 响应速度快、 控制精度高、 抗干扰能力强及 算法简单的特点. 并且, 该技术特别适合于数字化实 现, 完全顺应了数字化发展的趋势. 四旋翼飞行器是一个具有六自由度 ( 位置和
{
{
2
四旋翼飞行姿态控制仿真
采用上述微分器, 则可实现 v1 ( k) → v( k) , v2 ( k ) → v ( k) . 并且, 如果 v( k) 是带有噪声的信 号, 微分器可同时实现滤波.
采用由加拿大 Quanser 公司生产的四旋翼盘 旋实验装置, 来研究姿态的控制问题. 在 Matlab 的 Simulink 下, 将使用连续和离散两种自抗扰控 制技术进行仿真.
Abstract: In this paper,the structure of the active disturbance rejection control technique is described in detail,including the tracking differentiator, extended state observer and nonlinear state error feedback. Typical algorithms of each part are given as well. In order to control the attitude of the quadrotor robot as we desired,we design two kinds of ADRC ,including the continuous ADRC and the discrete ADRC. Simulations were carried out based on Simulink. After parameter adjustment,the simulation results show that the ADRC can meet the need of control accuracy and swiftness of response. It also indicates that the controller has strong robustness and antidisturbance performance,which can control the nonlinear coupling systems effectively. Keywords: ADRC ; tracking differentiator; extended state observer; quadrotor robot PID 控制器是不依赖于被控对象的精确数学 模型, 只用控制目标与对象实际输出之间的误差 来产生消除此误差的控制策略, 所以, 其在控制工 程实践中得到了广泛的应用. 然而, 随着科学技术 的发展对控制精度、 控制速度以及对环境变化的 适应能力的要求越来越高, 经典 PID 的缺点逐渐 显露出来. 自 20 世纪 80 年代开始, 韩京清
[4-5 ]
1. 2
扩张状态观测器( ESO)
扩张状态观测器可以估计出系统的状态和总 扰动. 其中, 总扰动是指系统自身模型的不确定性 ( 内扰) 和系统的外部扰动( 外扰 ) 的综合作用. 将 ESO 估计出来的总扰动量补偿到控制器中去, 就 可以使原来的非线性系统转变为线性的积分器串 联型控制系统. 上述动态估计补偿总和扰动的技 就是自抗扰控制技术的最核心技术 . 术, 一种连续形式的 ESO 算法如下: a1 , 1 = z2 - β01 fal( e, δ) , z z a2 , 2 = z3 - β02 fal( e, δ) , z an , n = z n + 1 - β0n fal( e, δ) + b0 u ( t) , z an +1 , n + 1 = - β0( n + 1) fal( e, δ) . 一种离散形式的 ESO 算法如下: a1 , δ) ) , z1( k + 1) = z1( k) + h( z2( k) - β01 fal( e, z ( k + 1) = z ( k) + h( z ( k) - β fal( e, a2 , δ) ) , 2 3 02 2 + = zn( k) + h( zn+1( k) - β0n fal( e, an , δ) + zn( k 1) b0 u( k) ) , an+1 , zn+1( k + 1) = zn+1( k) + h( - β0( n+1) fal( e, δ) ) . a1 ~ a n + 1 均为 式中: h 为采样周期, β01 ~ β0( n + 1) , 可调参数, δ 为线性段的区间长度,fal( ) 函数为 | e | a sign( e) , | e | > δ; fal( e, a, δ) = e , | e | ≤ δ. 1 -a δ 1. 3 非线性状态误差反馈律( NLSEF ) 非线性状态误差反馈律是通过非线性函数, 将 TD 产生的跟踪信号及其微分信号与 ESO 估计 出的系统的状态进行适当的组合, 最终作为系统 . 的控制量 以二阶系统为例, 一种采用 fal( ) 函数组合 的 NLSEF 算法为 u0 = β1 fal( e1 , a1 , a2 , δ) + β2 fal( e2 , δ) . 式中: β1 、β2 为 可 调 参 数. 系 统 的 状 态 误 差 是 e2 = v2 - z2 . 对误差反馈控制量 u0 , 指 e1 = v1 - z 1 , 用总扰动估计值 z3 的补偿来决定最终控制量: u = u0 - z3 / b0 或 u = ( u0 - z3 ) / b0 . “补偿因子” . 式中可调参数 b0 是决定补偿强弱的