语义分割结果后处理 腐蚀膨胀连通
编程实现膨胀运算或者腐蚀运算
数字图像处理实验编程实现膨胀运算或者腐蚀运算姓名:学好:0904210239指导老师:王韬时间:2012年5月编程实现膨胀运算或者腐蚀运算一、实验原理腐蚀:是一种消除连通域的边界点,使边界向内收缩的处理。
设计一个结构元素,结构元素的原点定位在待处理的目标像素上,通过判断是否覆盖,来确定是否该点被腐蚀掉。
膨胀:是将与目标区域的背景点合并到该目标物中,使目标物边界向外部扩张的处理。
设计一个结构元素,结构元素的原点定位在背景像素上,判断是否覆盖有目标点,来确定是否该点被膨胀为目标点。
二、实验步骤腐蚀:1)扫描原图,找到第一个像素值为1的目标点;2)将预先设定好形状以及原点位置的结构元素的原点移到该点;3)判断该结构元素所覆盖范围内的像素值是否全部为1:如果是,则腐蚀后图像中的相同位置上的像素值为1;如果不是,则腐蚀后图像中的相同位置上的像素值为0;4)重复2)和3),直到所有原图中像素处理完成。
膨胀:1)扫描原图,找到第一个像素值为0的背景点;2)将预先设定好形状以及原点位置的结构元素的原点移到该点;3)判断该结构元素所覆盖范围内的像素值是否存在为1的目标点:如果是,则膨胀后图像中的相同位置上的像素值为1;如果不是,则膨胀后图像中的相同位置上的像素值为0;4)重复2)和3),直到所有原图中像素处理完成。
三、实验程序# include <afxwin.h># include <windows.h># include <iostream.h># include <stdlib.h># include <math.h># define PI 3.14159265typedef struct{double re;double im;}COMPLEX;COMPLEX Add(COMPLEX c1,COMPLEX c2){COMPLEX c;c.re=c1.re+c2.re;c.im=c1.im+c2.im;return c;}COMPLEX Sub(COMPLEX c1,COMPLEX c2){COMPLEX c;c.re=c1.re-c2.re;c.im=c1.im-c2.im;return c;}COMPLEX Mul(COMPLEX c1,COMPLEX c2){COMPLEX c;c.re=c1.re*c2.re-c1.im*c2.im;c.im=c1.re*c2.im+c2.re*c1.im;return c;}int nWidth;int nHeight;int nColorBits;int nColor;int nLen;int nByteWidth;BYTE * lpBitmap;BYTE * lpBits;void OpenFile(CString FileName);void SaveFile(CString FileName);void fushi();void pengzhang();void OpenFile(CString FileName){HANDLE hFile= ::CreateFile(FileName,GENERIC_READ,FILE_SHARE_READ,NULL,OPEN_EX ISTING,FILE_ATTRIBUTE_NORMAL,NULL);if(hFile==0){printf("不能调开文件,请重新选择! \n");return;}DWORD WriteNum;BITMAPFILEHEADER BFH;ReadFile(hFile,&BFH,14,&WriteNum,NULL);if((BFH.bfType!='MB')||(WriteNum!=sizeof(BITMAPFILEHEADER))){printf("不是BMP位图文件或数据有误! \n");return;}nLen = GetFileSize(hFile,NULL)-sizeof(BITMAPFILEHEADER);lpBitmap= new BYTE[nLen];ReadFile(hFile,lpBitmap,nLen,&WriteNum,NULL);BITMAPINFOHEADER * BIH = ((BITMAPINFOHEADER*)lpBitmap);nWidth = BIH ->biWidth;nHeight = BIH ->biHeight;nColorBits= BIH ->biBitCount;nByteWidth= (nWidth*nColorBits+31)/32*4;nColor = (nColorBits>8)?0:(1<<nColorBits);lpBits = lpBitmap + sizeof(BITMAPINFOHEADER) +sizeof(RGBQUAD)*nColor;CloseHandle(hFile);}void SaveFile(CString FileName){HANDLE hFile= ::CreateFile(FileName,GENERIC_WRITE,FILE_SHARE_WRITE,NULL,CREAT E_ALWAYS,FILE_ATTRIBUTE_NORMAL,NULL);if(hFile ==0){printf("不能创建文件,请重新选择! \n");return;}unsigned long WriteNum;BITMAPFILEHEADER BFH;BFH.bfType = 'MB';BFH.bfSize = nLen + sizeof(BITMAPFILEHEADER);BFH.bfOffBits = sizeof(BITMAPFILEHEADER) +sizeof(BITMAPINFOHEADER) + nColor * sizeof(RGBQUAD);BFH.bfReserved1 = BFH.bfReserved2 = 0;WriteFile(hFile,&BFH,sizeof(BITMAPFILEHEADER),&WriteNum,NULL);WriteFile(hFile,(BITMAPINFOHEADER* )lpBitmap,nLen,&WriteNum,NULL);CloseHandle(hFile);}void fushi(){unsigned char * data,* lpDst,* temp ;//分别指向源图像和缓存图像的指针temp=new BYTE[256*256];//暂时分配内存,以保存新图像for (int i=1;i<nHeight-1;i++){for (int j=1;j<nWidth-1;j++){data=(lpBits+nByteWidth*j+i);//指向原图像第j行第i个像素的指针lpDst=(temp+nByteWidth*j+i);//指向目标图像第j行第i个像素的指针*lpDst=255;//目标图像中的当前点先赋成白色if(*data==255){if( *(data-1)==0 || *(data+1)==0 ||*(data-nByteWidth)==0 || *(data+nByteWidth)==0 ||*(data-nByteWidth-1)==0 || *(data-nByteWidth+1)==0 ||*(data+nByteWidth-1)==0 || *(data+nByteWidth+1)==0)*lpDst=0;}else*lpDst=0;}}for(i=0;i<nHeight;i++){for(int j=0;j<nWidth;j++){data=(lpBits+nByteWidth*j+i);lpDst=(temp+nByteWidth*j+i);* data = * lpDst;}delete temp;//释放空间}void pengzhang(){unsigned char * data,* lpDst,* temp ;//分别指向源图像和缓存图像的指针temp=new BYTE[256*256];//暂时分配内存,以保存新图像for (int i=1;i<nHeight-1;i++){for (int j=1;j<nWidth-1;j++){data=(lpBits+nByteWidth*j+i);//指向原图像第j行第i个像素的指针lpDst=(temp+nByteWidth*j+i);//指向目标图像第j行第i个像素的指针*lpDst=0;//目标图像中的当前点先赋成黑色if(*data==0){if( *(data-1)==255 || *(data+1)==255 ||*(data-nByteWidth)==255 || *(data+nByteWidth)==255 ||*(data-nByteWidth-1)==255 || *(data-nByteWidth+1)==255 ||*(data+nByteWidth-1)==255 || *(data+nByteWidth+1)==255)*lpDst=255;}else*lpDst=255;}}for(i=0;i<nHeight;i++){for(int j=0;j<nWidth;j++){data=(lpBits+nByteWidth*j+i);lpDst=(temp+nByteWidth*j+i);* data = * lpDst;}}delete temp;//释放空间}{char OpenFileName[100];char SaveFileName[100];printf("输入待处理的图像路径: \n");gets(OpenFileName);printf("保存处理图像结果的路径: \n");gets(SaveFileName);OpenFile(OpenFileName);cout<<"选择:1腐蚀,2膨胀"<<endl;int n;cin>>n;switch(n){case 1:fushi();break;case 2:pengzhang();break;}SaveFile(SaveFileName);return 0;}四、实验结果原图像:腐蚀后:膨胀后:。
腐蚀膨胀算法详细解释
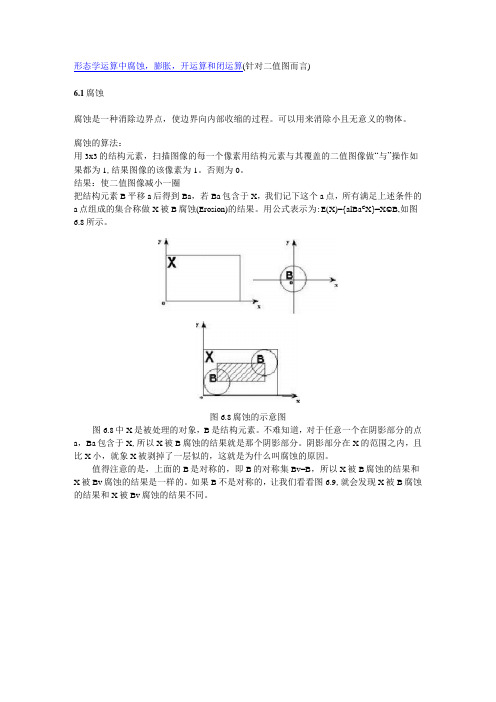
形态学运算中腐蚀,膨胀,开运算和闭运算(针对二值图而言)6.1腐蚀腐蚀是一种消除边界点,使边界向内部收缩的过程。
可以用来消除小且无意义的物体。
腐蚀的算法:用3x3的结构元素,扫描图像的每一个像素用结构元素与其覆盖的二值图像做“与”操作如果都为1,结果图像的该像素为1。
否则为0。
结果:使二值图像减小一圈把结构元素B平移a后得到Ba,若Ba包含于X,我们记下这个a点,所有满足上述条件的a点组成的集合称做X被B腐蚀(Erosion)的结果。
用公式表示为:E(X)={alBa C X}=X©B,如图6.8所示。
图6.8腐蚀的示意图图6.8中X是被处理的对象,B是结构元素。
不难知道,对于任意一个在阴影部分的点a,Ba包含于X,所以X被B腐蚀的结果就是那个阴影部分。
阴影部分在X的范围之内,且比X小,就象X被剥掉了一层似的,这就是为什么叫腐蚀的原因。
值得注意的是,上面的B是对称的,即B的对称集Bv=B,所以X被B腐蚀的结果和X被Bv腐蚀的结果是一样的。
如果B不是对称的,让我们看看图6.9,就会发现X被B腐蚀的结果和X被Bv腐蚀的结果不同。
y图6.9结构元素非对称时,腐蚀的结果不同图6.8和图6.9都是示意图,让我们来看看实际上是怎样进行腐蚀运算的。
在图6.10中,左边是被处理的图象X (二值图象,我们针对的是黑点),中间是结构元素B ,那个标有origin 的点是中心点,即当前处理元素的位置,我们在介绍模板操作时也有过类似的概念。
腐蚀的方法是,拿B 的中心点和X 上的点一个一个地对比,如果B 上的所有点都在X 的范围内,则该点保留,否则将该点去掉;右边是腐蚀后的结果。
可以看出,它仍在原来X 的范围内,且比X 包含的点要少,就象X 被腐蚀掉了一层。
o Q Q Q o & QO Qo Q o O oooo o o o o o 0- 0 O 0 o o •• • ■ Oo o oo o o 0 o o o o o 0 0 o o o ••o o o oo o o o ■ ■ o o 0 0 o o o ••o 0 0 oo o o 0 ■ • ♦ o QQ Q ■0 0 & o Q Q Q 0 0 * * 0 0 0 O 0 0 • ♦ ♦■ 0 Q Q ◎ 00o o ■ •0 0 o O ■ ■ ■ ■ *« O Q Qo o■ ■ ■ ■ Q Q c- O■ * ■ o GO O O O o o •o o ■ •• ■ o o o o O oO ■ ■ ■o 0o O O o O ♦<Q 0■••■ o a o o O o O o o 0 0 o 0oO o oooo\>o0 00o o o o 0 0 0'originFEX e 6图6.10腐蚀运算 图6.11为原图,图6.12为腐蚀后的结果图,能够很明显地看出腐蚀的效果。
腐蚀膨胀算法原理
腐蚀膨胀算法原理
腐蚀膨胀算法(Erosion-DilationAlgorithm,缩写为EDA)是图像处理中最常用的算法之一。
它主要应用于图像的二值化处理,可以有效地消除图像中的噪声,以及实现图像中文字和物体的分割。
EDA是一种分水岭算法(Watershed Algorithm),该算法包括两个步骤,腐蚀和膨胀。
腐蚀步骤将从图像中提取图像对象的轮廓,而膨胀步骤将对象的轮廓填充,从而实现对图像对象的分割。
一般来说,EDA算法可以分为以下两步:
(1)腐蚀:腐蚀是图像处理中常用的技术,它的目的是去除图像中的噪声,消除图像中的噪点,并实现对图像中的文字或物体的轮廓提取。
腐蚀的基本原理是:使用一个结构元素(structuring element),它可以是不同类型的形状,如圆形、菱形、矩形等,将图像中某像素的非零元素替换为零。
(2)膨胀:膨胀是EDA算法中另一个重要的步骤,它是腐蚀的反向过程。
膨胀的基本原理是:使用一个结构元素将图像中某像素的零元素替换为非零元素,如果临近的像素是非零元素,则认为此像素属于某个对象的轮廓。
EDA算法的优点在于它既可以去除噪声,又可以实现文字或物体的分割。
此外,EDA算法还性能卓越,比一般算法要快得多,是图像处理中用到较多的算法之一。
但EDA算法也存在缺点:结构元素的选择不当,会影响到最终的结果;由于腐蚀操作的迭代,会导致目标图像的误差及失真问题;同
样,膨胀操作也会null影响图像的体积及精度。
总而言之,腐蚀膨胀算法是一种有效的图像处理算法,在图像的噪声消除、文字分割等应用中均有良好的效果,但也有一定的缺点,应该合理选择结构元素,以保证算法的正确性和最佳效果。
二值形态学膨胀、腐蚀、开、闭运算opencv
【二值形态学膨胀、腐蚀、开、闭运算opencv的深度解析】一、概念介绍1. 二值形态学在图像处理中,二值形态学是一种针对二值图像进行的形态学操作,主要包括膨胀、腐蚀、开、闭运算等。
2. 膨胀膨胀是二值形态学中的一种基本操作,它能够使目标区域扩张并填充内部的空洞,从而使目标变大。
3. 腐蚀腐蚀是二值形态学中的另一种基本操作,它能够使目标区域收缩并去除边缘细节,从而使目标变小。
4. 开运算开运算是先腐蚀后膨胀的组合操作,可以用来去除图像中的噪声和小的干扰目标。
5. 闭运算闭运算是先膨胀后腐蚀的组合操作,可以用来填补图像中的小孔和裂缝。
二、深入探讨1. 膨胀的原理和作用膨胀通过结构元素的滑动来扩张目标区域,可以使目标变大,填充空洞,连接断裂的目标,是图像处理中常用的操作之一。
2. 腐蚀的原理和作用腐蚀通过结构元素的滑动来收缩目标区域,可以使目标变小,去除边缘细节,分离接触的目标,也是图像处理中常用的操作之一。
3. 开闭运算的应用场景开运算通常用于去除图像中的小噪声和杂点,可以平滑目标轮廓,提高目标边缘的连通性;闭运算通常用于填补图像中的小孔和断裂,可以使目标更加完整,减少断裂和裂缝。
4. opencv中的二值形态学函数opencv提供了丰富的二值形态学函数,可以方便地进行膨胀、腐蚀、开、闭运算,如cv2.dilate()、cv2.erode()、cv2.morphologyEx()等,可以通过设置结构元素的形状和大小来调整操作效果。
5. 个人观点和理解对于二值形态学操作,我认为膨胀和腐蚀是其基础,而开闭运算则是在这两者基础上的进一步应用,能够更加精细地处理目标区域,去除干扰和噪声,提取有效信息。
在实际应用中,需要根据具体情况选择不同的操作和参数,以达到最佳的处理效果。
三、总结回顾通过本文的介绍和分析,我们深入理解了二值形态学中的膨胀、腐蚀、开、闭运算的原理和作用,以及在opencv中的应用方式。
我们也从个人观点出发,探讨了这些操作的实际意义和效果。
腐蚀膨胀算法详细解释
腐蚀膨胀算法详细解释腐蚀算法是指通过与给定的结构元素进行最小值运算以缩小图像的白色区域。
它在图像中寻找白色区域,对这些区域进行腐蚀操作,使它们变得更小。
这种算法主要用于图像去噪、形态学滤波等操作。
腐蚀算法的步骤如下:1.定义结构元素:结构元素是一个小的二值图像,通常是一个正方形或圆形。
它用于定义腐蚀操作的形状和大小。
2.将结构元素与原始图像进行最小值运算:以结构元素为基准,将其放置在原始图像上不同的位置,并计算结构元素与原始图像上对应像素位置的最小值。
将得到的最小值作为输出图像上对应位置的像素值。
这一过程即为腐蚀操作。
3.重复进行腐蚀操作:对于腐蚀后的输出图像,将其作为新的输入图像,再次进行腐蚀操作,直到达到预期的腐蚀效果为止。
膨胀算法与腐蚀算法相反,它通过与给定的结构元素进行最大值运算,来放大图像的白色区域。
膨胀算法主要用于图像的填充、轮廓增强等操作。
膨胀算法的步骤如下:1.定义结构元素:结构元素与腐蚀算法相同,用于定义膨胀操作的形状和大小。
2.将结构元素与原始图像进行最大值运算:以结构元素为基准,将其放置在原始图像上不同的位置,并计算结构元素与原始图像上对应像素位置的最大值。
将得到的最大值作为输出图像上对应位置的像素值。
这一过程即为膨胀操作。
3.重复进行膨胀操作:对于膨胀后的输出图像,将其作为新的输入图像,再次进行膨胀操作,直到达到预期的膨胀效果为止。
腐蚀和膨胀算法常常结合使用,形成一对形态学操作,用于提取图像特征,如边缘检测。
具体的实现方法有:1.图像初始化:将输入图像转为二值图像。
如原始图像是灰度图像,可以使用阈值分割将图像转为二值图像。
2.定义结构元素:根据具体应用需求,选择相应形状和大小的结构元素。
3.腐蚀操作:对于二值图像,将结构元素与图像进行最小值运算,得到腐蚀后的图像。
4.膨胀操作:对于腐蚀后的图像,将结构元素与图像进行最大值运算,得到膨胀后的图像。
5.形态学操作:将膨胀操作的结果减去腐蚀操作的结果,得到最终的形态学操作结果。
先膨胀后腐蚀的运算_解释说明以及概述

先膨胀后腐蚀的运算解释说明以及概述1. 引言1.1 概述在图像处理和形态学图像分析领域,先膨胀后腐蚀的运算被广泛应用。
该运算是一种基于形态学思想的操作,它通过对图像进行膨胀和腐蚀两个步骤的组合操作,能够改变图像的形状、大小、结构等特征。
这种运算方法具有一定的特点和优势,已被证明在许多应用场景中具有重要价值。
1.2 文章结构本文将首先介绍先膨胀后腐蚀的运算的定义和原理,在此基础上详细解释其具体步骤,并提供实例进行说明。
接着,将探讨该运算在图像处理、形态学图像分析以及模式识别等领域中的应用。
同时,本文还会与其他相关运算进行比较分析,并对不同尺寸结构元素对先膨胀后腐蚀结果影响进行深入研究。
最后,通过总结与展望来评估先膨胀后腐蚀运算的局限性和未来发展趋势。
1.3 目的本文旨在深入探讨先膨胀后腐蚀的运算,全面了解其原理、特点和应用领域,以及与其他相关运算的比较分析。
通过本文的阐述,读者将能够理解并掌握先膨胀后腐蚀运算,并能在实际应用中灵活运用该方法。
对于图像处理、形态学图像分析以及模式识别等领域的研究人员和工程师而言,本文将为他们提供有价值的参考和指导。
以上是“1. 引言”部分的内容,请根据需要进行修改和补充。
2. 先膨胀后腐蚀的运算解释说明:2.1 膨胀操作定义与原理:膨胀是形态学图像处理中的基本运算之一,它可以用来增强图像中亮度较高的区域。
膨胀操作基于结构元素,通过将结构元素沿着图像的每个像素进行平移,并找出覆盖范围内的最大值作为输出像素的灰度值。
这意味着,通过膨胀操作,图像中亮度较高的区域将会逐渐扩展。
膨胀操作可以用数学形式描述如下:D = A ⊕B其中,D表示进行膨胀后所得到的图像,A表示待处理的原始图像,B表示结构元素。
2.2 腐蚀操作定义与原理:与膨胀相反,腐蚀是一种可以去除图像中亮度较低区域的操作。
它同样依赖于结构元素,并根据在覆盖范围内找出最小值作为输出像素的灰度值。
因此,通过连续进行多次腐蚀操作,亮度较低或细小的细节将会不断被消除。
Halcon之膨胀,腐蚀,开闭运算

Halcon之膨胀,腐蚀,开闭运算膨胀:对边界点进行扩充,填充空洞,使边界向外部扩张的过程。
腐蚀:消除物体边界点,使边界向内部收缩的过程,把小于结构元素的物体去除掉.开运算:先腐蚀后膨胀的过程称为开运算,作用:去除孤立的小点,毛刺,消除小物体,平滑较大物体边界,同时不改变其面积.(此处的不改变其面积是有条件的,即结构元素设置的必须要合理)闭运算:先膨胀后腐蚀的过程是闭运算。
作用:填充物体内细小的空洞,连接临近物体,平滑边界,同时不改变其面积。
(此处的不改变其面积是有条件的,即结构元素设置的必须要合理)膨胀与腐蚀的主要作用:(1)消除噪声(2)分割(isolate)出独立的图像元素,在图像中连接(join)相邻的元素(3)寻找图像中明显的极大值或极小值区域(4)求出图像的梯度Notice:膨胀和腐蚀是对白色部分(高两部分)而言的,不是黑色部分,膨胀是图像中的高亮部分进行膨胀,类似于“领域扩张”,效果图拥有比原图更大的高亮区域;腐蚀是原图中的高亮部分被腐蚀,类似于“领域被蚕食”,效果图拥有比原图更小的高亮区域膨胀腐蚀read_image (Image,'Fabrik')*使用固定的阈值分割图像threshold (Image, Region, 128, 255) *使相邻的区域连接成为一个整体,连通处理connection (Region, ConnectedRegions)*根据面积过滤出我们需要提取的区域select_shape (ConnectedRegions, SelectedRegions, 'area', 'and', 8000, 9000)*使用矩形结构元素进行膨胀dilation_rectangle1 (SelectedRegions, RegionDilation, 3, 3) *使用圆形结构元素进行膨胀dilation_circle (SelectedRegions, RegionDilation1, 2.5)*使用矩形结构元素进行腐蚀erosion_rectangle1 (SelectedRegions, RegionErosion, 3, 3)*使用圆形结构元素进行腐蚀erosion_circle (SelectedRegions, RegionErosion1,2.5)*开运算opening_rectangle1 (SelectedRegions, RegionOpening, 3, 3) *闭运算closing_rectangle1 (SelectedRegions, RegionClosing, 3, 3)。
腐蚀膨胀算法
腐蚀膨胀算法腐蚀膨胀算法是一种基于形态学的图像处理方法,它提供了一种高效、有用的解决方案,用于提取图像中的特征。
腐蚀膨胀算法最初由德国数学家Herbert A. Hausser在1946年提出,至今已经在计算机视觉领域取得了巨大的成功。
腐蚀膨胀算法是一种模式填充算法,它将图像分割成若干个连续的图元,然后利用腐蚀膨胀的方法,从已知图像中提取新的图元,并根据相关的阈值来确定新的图元是否被确认为真实的特征。
这种方法在提取图像中的轮廓特征时尤为有效。
通常,腐蚀膨胀算法的实现包括以下几个步骤:1.腐蚀:通过改变图像中的像素值,使其与图像的边缘更加相似;2.膨胀:通过加强与腐蚀后图像中的像素值相似的像素,使其与图像的边缘更加相似;3.计算结果:将腐蚀后的图像与膨胀后的图像进行比较,结果用来表示它们的相似程度;4.阈值处理:根据相似程度的结果,确定每一个图元是否作为真实的特征被提取。
腐蚀膨胀算法在计算机视觉中具有重要作用,它可以用于检测图像中的轮廓特征,也可以用于形状识别、图像分割等多种应用。
除此之外,它还可以用于处理文本中的词汇和语义信息,是文本信息处理的一种重要工具。
腐蚀膨胀算法的实现也比较容易,它可以使用图像处理的基本技术实现,如卷积运算、图像滤波、像素级处理等。
同时,显著性检测技术也可以更好地实现腐蚀膨胀算法,从而更有效地提取出图像特征。
此外,腐蚀膨胀算法也可以利用图像处理技术,如颜色分割、形状分析等来实现,从而提取出图像中更为详细的特征信息,以及复杂图像处理问题的解决方案。
最后,我们可以把腐蚀膨胀算法应用于图像识别、机器人导航、地面目标检测等多种现实世界中的应用,所获得的效果甚至可以比人眼可见的结果更加准确。
综上,腐蚀膨胀算法是一种高效且有用的图像处理方法,它可以用于从图像中提取特征,也可以用来提取文本特征,甚至可以应用于实际世界中的复杂问题,具有广泛的应用前景。
腐蚀膨胀算法原理
腐蚀膨胀算法原理腐蚀膨胀算法(Erosion and Dilation),是数字图像处理中常用的形态学操作之一、它们是基于图像中的区域形状进行处理的,可以用来改变图像的形态结构。
腐蚀操作可以使图像中的区域变小或者消失,而膨胀操作可以使图像中的区域变大或者连通。
腐蚀操作可以看作是将一个结构元素与图像进行逻辑“与”运算,如果结构元素的全部像素都与图像的相应位置的像素匹配,则该位置的像素值保持不变,否则将其置为0。
腐蚀操作能够删除图像中边缘或者小的细节部分。
腐蚀操作的基本原理是遍历图像的每一个像素,对于每个像素,检查其周围与结构元素的重叠部分(也称为该像素的邻域),如果重叠部分的像素值都为1,则保持原像素值不变,否则将其置为0。
这样,腐蚀操作不断缩小图像中的区域,直到所有的结构元素都与图像的相应位置的像素匹配。
腐蚀操作的伪代码如下:1.遍历图像的每一个像素2.对于每个像素,检查其周围与结构元素的重叠部分3.如果重叠部分的像素值都为1,则保持原像素值不变4.否则将其置为05.返回处理后的图像膨胀操作与腐蚀操作正好相反,可以看作是将一个结构元素与图像进行逻辑“或”运算,如果结构元素的任何像素与图像的相应位置的像素匹配,则该位置的像素值保持不变,否则将其置为1、膨胀操作可以使图像中的区域变大或者连通。
膨胀操作的基本原理与腐蚀操作类似,同样遍历图像的每一个像素,对于每个像素,检查其周围与结构元素的重叠部分,如果重叠部分的像素值中有一个为1,则保持原像素值不变,否则将其置为1、这样,膨胀操作可以不断扩大图像中的区域,直到所有的结构元素都与图像的相应位置的像素匹配。
膨胀操作的伪代码如下:1.遍历图像的每一个像素2.对于每个像素,检查其周围与结构元素的重叠部分3.如果重叠部分的像素值中有一个为1,则保持原像素值不变4.否则将其置为15.返回处理后的图像腐蚀膨胀算法常用于图像中的目标检测、边缘检测和形状识别等领域。
通过腐蚀操作可以消除孤立的噪声点或者细小的细节,从而提高目标检测的准确性。
A12_数学形态学腐蚀膨胀运算的快速算法
陆宗骐,朱煜: 数学形态学腐蚀膨胀运算的快速算法_______________________________第一作者简介: 陆宗骐(1945-),男,教授,主要研究领域为图像处理与模式识别,编著《C/C++图像处理编程》和合作编著《Visual C++.NET 图像处理编程》.数学形态学腐蚀膨胀运算的快速算法陆宗骐,朱煜(华东理工大学信息学院,上海,200237,E-mail: zqlu@ )摘 要: 本文介绍了数学形态学中结构元素为4连通或8连通的3×3邻域时腐蚀、膨胀运算的快速算法。
区域采用线段编码表示,腐蚀与膨胀运算在当前线段与其相邻的上下线段之间通过逻辑运算实现。
4连通邻域结构元素下作腐蚀(或膨胀)运算时,先将当前线段两侧各除去(扩展)一个像素,再与上下邻接线段作与(或)运算。
8连通邻域结构元素下与此相类似,不同在于参与运算的3条线段都需在两侧除去或扩展像素。
运算速度一般可提高3~5倍。
关键词: 数学形态学;腐蚀;膨胀;快速算法;Fast Algorithm of Mathematical Morphology Erosion and DilationOperationLU Zong-qi, ZHU Yu(The College of Information, East China University of Science and Technology, Shanghai 200237)Abstract: In this paper, a fast algorithm of mathematical morphology erosion and dilation operation for 3×3 neighborhood structuring element with 4-connectivity or 8-connectivity is presented. Regions are marked with line segment encoding technique. Erosion and dilation operation are performed by Boolean calculation according to three adjacent lines, namely current line with its upper and lower adjacent lines. Erosion is obtained by logic operation AND. Dilation is obtained by logic operation OR. The new algorithm is 3~5 times faster than normal morphology operation. Keywords: Mathematical Morphology; Erosion; Dilation; Fast Algorithm;1 引言在计算机图形图像处理中有一些著名的处理算法,它们非常简单、巧妙,易于理解、易于实现,但往往存在运行速度慢的缺点,不经改进难以实际使用。
形态学(膨胀、腐蚀、开运算和闭运算)
形态学(膨胀、腐蚀、开运算和闭运算)
形态学是数字图像处理中常用的一种方法,主要包括膨胀、腐蚀、开运算和闭运算四种基本操作。
这些操作可以用来改变图像的形状和结构,从而实现对图像的分割、特征提取和去噪等处理。
膨胀是形态学处理中的一种操作,其主要作用是扩张图像中的目标区域。
具体来说,膨胀操作会将目标区域的边界向外扩展,使得目标变得更加完整和连通。
膨胀操作常常用于填充图像中的空洞、连接断裂的目标以及增加目标的大小和粗细。
与膨胀相反,腐蚀是一种将目标区域缩小和削弱的操作。
腐蚀操作会消除目标区域的边界像素,使得目标变得更加细化和疏松。
腐蚀操作常常用于去除图像中的噪声、分割目标区域以及减小目标的大小和粗细。
开运算是先进行腐蚀操作,再进行膨胀操作的组合操作。
开运算可以去除图像中的小型噪声,并使得目标区域更加平滑和连续。
开运算的效果类似于平滑滤波,可以减少图像中的细节和边缘。
闭运算是先进行膨胀操作,再进行腐蚀操作的组合操作。
闭运算可以填充图像中的小型空洞,并使得目标区域更加完整和连通。
闭运算的效果类似于形态学填充,可以增加目标的大小和粗细。
总的来说,形态学操作是一种非常有效的图像处理方法,可以用来改变图像的形状和结构,从而实现各种图像处理任务。
膨胀、腐蚀、
开运算和闭运算是形态学处理中常用的四种基本操作,它们各自具有不同的作用和效果,可以根据实际需求灵活选择和组合。
形态学操作在数字图像处理中有着广泛的应用,可以帮助我们更好地理解和处理图像数据,提取有用信息并实现各种图像处理任务。
【数字图像处理】二值化图像腐蚀运算与膨胀运算

【数字图像处理】⼆值化图像腐蚀运算与膨胀运算形态学基本概念基本思想:⽤⼀定形态的结构元素去度量和提取图像中的对应形状,达到分析知识的⽬的。
可⽤于图像处理的各个⽅⾯,包括图像分割、边界检测、特征提取。
结构元素:形态学变换中的基本元素,使为了探测图像的某种结构信息⽽设计的特定形状和尺⼨的图像,称为收集图像结构信息的探针。
结构元素有多种类型:如圆形、⽅形、线型等,可携带知识(形态、⼤⼩、灰度和⾊度信息)来探测、研究图像的结构特点。
形态学运算包括:⼆值化腐蚀和膨胀、⼆值化开闭运算、⾻架抽取、击中击不中变换等。
形态学四个基本算⼦:膨胀,腐蚀、开启和闭合组成,这些基本运算还可以推导和组合成各种数学形态学实⽤算法。
腐蚀运算腐蚀运算思路:定义结构元素(与模板类似),结构元素在整幅图像中移动,移动到每个像素点上,只有结构元素与图像上对应像素点的像素值全部相等时,保留这个像素点的值。
腐蚀运算作⽤:消除物体边界点,使边界点向内部收缩,可以把⼩于结构元素的物体去除。
选取不同⼤⼩的结构元素,去除不同⼤⼩的物体。
如两个物体间有细⼩的连通,通过腐蚀可以将两个物体分开。
腐蚀运算:腐蚀运算⽰意图:基本⽅法:通常拖到结构元素在X域移动,在每⼀个位置上,当结构元素B在中⼼平移到X图像上的某优点(x,y)。
如果结构元素内的每⼀个像素都与以(x,y)为中⼼的相同邻域中对应像素完全相同,那么就保留(x,y)像素点。
对于不满⾜条件的像素点则全部删除,达到边界向内收缩效果。
腐蚀运算c语⾔实现⽔平腐蚀:不处理左右两边垂直腐蚀:不处理上下两⾏全⽅位腐蚀:不处理四周 int Image[120][180];memset(Image, 0, sizeof(Image));//全⽅位腐蚀运算for (int i = 1; i < Use_ROWS-1; i++){for (int j = 1; j < Use_Line - 1; j++){if (Image_Use[i][j] == 255 &&Image_Use[i][j + 1] == 255 &&Image_Use[i][j - 1] == 255){Image[i][j] = 255;}}}膨胀运算膨胀运算思路:定义结构元素(与模板类似),结构元素在整幅图像中移动,移动到每个像素点上,如果结构元素与图像上对应像素点的像素值⾄少有⼀个像素相等时,保留这个像素点的值。
OpenCV图像处理篇之腐蚀与膨胀
腐蚀与膨胀腐蚀和膨胀是图像的形态学处理中最基本的操作,之后遇见的开操作和闭操作都是腐蚀和膨胀操作的结合运算。
腐蚀和膨胀的应用非常广泛,而且效果还很好:1.腐蚀可以分割(isolate)独立的图像元素,膨胀用于连接(join)相邻的元素,这也是腐蚀和膨胀后图像最直观的展现2.去噪:通过低尺寸结构元素的腐蚀操作很容易去掉分散的椒盐噪声点3.图像轮廓提取:腐蚀操作4.图像分割5.等等...(在文后给出一则简单实用膨胀操作提取车牌数字区域的例子)结构元素是形态学操作中最重要的概念,如上图,B为结构元素。
腐蚀操作描述为:扫描图像的每一个像素,用结构元素与其覆盖的二值图像做“与”操作:如果都为1,结果图像的该像素为1,否则为0。
膨胀操作描述为:扫描图像的每一个像素,用结构元素与其覆盖的二值图像做“与”操作:如果都为0,结果图像的该像素为0,否则为1。
以上都是关于二值图像的形态学操作,对于灰度图像:1.腐蚀操作其中,g(x,y)为腐蚀后的灰度图像,f(x,y)为原灰度图像,B为结构元素。
腐蚀运算是由结构元素确定的邻域块中选取图像值与结构元素值的差的最小值。
2.膨胀操作其中,g(x,y)为腐蚀后的灰度图像,f(x,y)为原灰度图像,B为结构元素。
膨胀运算是由结构元素确定的邻域块中选取图像值与结构元素值的和的最大值。
在灰度图的形态学操作中,一般选择“平摊”的结构元素,即结构元素B 的值为0,则上面对灰度图的形态学操作可简化如下:好了,这就是基本的形态学操作——腐蚀和膨胀,下面是使用OpenCV 对图像进行腐蚀和膨胀的程序,还是秉承我们一贯的原则:搁下理论,先直观地感觉图像处理算法的效果,实际项目需要时再深入挖掘!程序分析结果及实际应用对“黑白小猪”进行膨胀操作的变化(随着结构元素大小的变化)如下图:对“黑白小猪”进行腐蚀操作的变化(随着结构元素大小的变化)如下图:膨胀与腐蚀在图像处理中具有广泛的用途,比如提取车牌过程中,可以通过膨胀运算确定车牌的区域。
(数字图像处理)腐蚀膨胀开运算闭运算

膨胀:是将与物体接触的所有背景点合并到该物体中,使边界向外部扩张的过程。可以用来填补物体中的空洞。
开运算:先腐蚀后膨胀的过程开运算。用来消除小物体、在纤细点处分离物体、平滑较大物体的边界的同时并不明显改变其面积。开运算通常是在需要去除小颗粒噪声,以及断开目标物之间粘连时使用。其主要作用与腐蚀相似,与腐蚀操作相比,具有可以基本保持目标原有大小不变的优点。
闭运算:先膨胀后腐蚀的过程称为闭运算。用来填充物体内细小空洞、连接邻近物体、平滑其边界的同时并不明显改变其面积。
原因:虽然腐蚀处理可以将粘连的目标物进行分离,膨胀处理可以将断开的目标物进行接续,但同时都存在一个问题,就是经过腐蚀处理后,目标物的面积小于原有面积,而经过膨胀处理之后,目标物的面积大于原有面积。开、闭运算就是为了解决这个问题而被提出的。
数学形态学中二值图像的形态变换是一种针对集合的处理过程。其形态算子的实质是表达物体或形状的集合与结构元素间的相互作用,结构元素的形状就决定了这种运算所提取的信号的形状信息。形态学图像处理是在图像中移动一个结构元素,然后将结构元素与下面的二值图像进行交、并等集合运算。
语义分割后处理方法

语义分割后处理方法
哎呀呀,说起“君子好逑”这类的诗词,那可真是多得像天上的星星
一样呢!就比如说里的“关关雎鸠,在河之洲。
窈窕淑女,君子好逑”,这多经典呀!这不就像那春天里绽放的花朵,鲜艳又迷人。
还有,“蒹葭苍苍,白露为霜。
所谓伊人,在水一方”,哇,那种朦
胧的美感,就好像你在雾中追寻着一个美丽的身影,让人心痒痒的,
对吧?这就像是你特别想吃一块蛋糕,可它就在你眼前却又有点够不
着的感觉。
再看看,“青青子衿,悠悠我心”,这表达的思念之情,多浓烈呀!
就跟你想念一个好久不见的好朋友似的,心里老是惦记着。
像这样的诗词还有很多很多呢!每一首都有着独特的韵味和魅力。
它们不就像是我们生活中的各种小惊喜吗,时不时地冒出来,让我们
感叹古人的情感是如此细腻而真挚。
难道你不觉得这些诗词特别有意思吗?它们能让我们穿越时空,去
感受古人的爱恨情仇。
我们可以从这些诗词中看到古人对爱情的追求,对美好的向往。
它们就像一把钥匙,打开了我们了解古代文化的大门。
我觉得呀,这些君子好逑类似的诗词,真的是中华文化的瑰宝呀,
它们永远都不会过时,会一直被人们传颂下去!。
膨胀连接法 -回复
膨胀连接法-回复什么是膨胀连接法?膨胀连接法是一种用于处理图像或视频中的目标分割问题的计算机视觉技术。
该方法主要基于数学形态学的原理,通过将目标进行膨胀操作,以便更好地捕捉目标的边界和形状。
这种方法在许多应用领域,如医学图像分割、工业品检测和自动驾驶等方面都取得了非常好的效果。
从理论上讲,膨胀连接法可以分为以下几个步骤来实现目标分割。
第一步:预处理在进行目标分割之前,首先需要对图像或视频进行一些预处理操作,以便为膨胀连接法提供更好的输入。
这些预处理操作包括灰度化、平滑滤波、边缘检测等。
其中,灰度化的目的是将彩色图像转换为灰度图像,以便更好地处理图像亮度信息。
平滑滤波则可以用来去除图像中的噪声,以减少后续处理过程中的误差。
边缘检测操作则有助于定位目标的边界位置,以便更好地进行分割。
第二步:定义种子点在膨胀连接法中,需要通过定义一些种子点作为起始点来进行目标分割。
种子点可以手动选取,也可以通过一些自动化的方法来生成。
这些种子点应该位于目标的内部,并且与目标物体的其他部分相隔一定的距离。
通过在图像或视频中选择几个合适的种子点,可以为膨胀连接法提供分割目标的初始信息。
第三步:膨胀操作膨胀操作是膨胀连接法的核心步骤之一。
在该步骤中,从种子点开始,通过膨胀操作逐渐扩展目标的区域,直到达到一定的条件为止。
膨胀操作的具体实现方式可以是根据像素的灰度值进行比较,也可以是根据像素的颜色进行比较。
无论采用何种方式,膨胀操作的目的是逐渐扩大目标的范围,以便更好地捕捉目标的边界和形状。
第四步:连接操作连接操作是膨胀连接法的另一个核心步骤。
在完成膨胀操作后,接下来需要对膨胀完成的目标区域进行连接操作,以去除其中的噪声和杂质。
连接操作通常基于目标区域的像素值进行比较。
如果相邻像素的像素值差距在一定范围内,那么这些像素将被划分到同一个连通区域中。
通过连接操作,可以将那些与目标不相干的区域排除出去。
第五步:后处理在完成膨胀连接操作后,最后一步是对分割结果进行一些后处理操作,以进一步提高分割的准确性和稳定性。
结合超像素的图像语义分割算法研究

结合超像素的图像语义分割算法研究随着计算机和人工智能技术的飞速发展,图像处理技术也在不断的提高。
其中,图像语义分割技术是一种非常重要的算法。
它可以将一张图片切分成若干个具有语义的区域,并为每个区域赋予不同的标记。
这样的技术在许多领域都有非常广泛的应用,比如自动驾驶、视频监控、医学图像等。
但是,由于图像具有高维、复杂等特点,使用传统的算法进行图像语义分割并不容易获得满意的效果。
最近几年,一种名为超像素的技术被广泛应用于图像处理领域。
超像素是一种由许多相似的像素组合而成的图像单元,它可以在一定程度上缩小图像的规模,同时还能保留图像的重要特征信息。
因此,结合超像素的图像语义分割算法近年来受到了越来越多的关注。
超像素算法的核心是对图像进行分组,将像素按一定的规则聚合成为若干个超像素,然后再对超像素进行后续处理。
其中,分组算法是一个非常关键的环节,直接关系到超像素的质量和性能。
常见的分组算法有基于区域生长的方法、基于图的方法、基于边缘的方法等。
基于区域生长的方法使用一些启发式规则来将相似的像素逐渐聚集成区域,具有较好的鲁棒性和可扩展性;基于图的方法则将图像转化成一幅图,然后对图进行分割,具有很好的理论基础和可靠性;基于边缘的方法则将超像素分界线当做边缘进行处理,具有很好的精度和鲁棒性。
超像素分组完成后,就可以对超像素进行特征提取和分类。
特征提取的目的是将超像素的颜色、纹理、形状等特征抽取出来,作为分类器的输入。
常用的特征提取方法有灰度直方图、局部二值模式、Gabor滤波器等。
分类器的目的是对超像素进行分类,将其归为不同的语义类别。
常用的分类器有支持向量机、随机森林、神经网络等。
值得注意的是,分类器的选择应该根据实际情况进行,不同的场景适合不同的算法。
最后,将分类结果进行后处理,消除一些噪声和不连通区域,就可以得到最终的图像语义分割结果。
常用的后处理方法有数学形态学、连通性检测、像素腐蚀膨胀等。
这些方法可以对分割结果进行细化、去噪等操作,以提高分割的精度和鲁棒性。
语义分割改进方案
语义分割是计算机视觉领域的重要任务,其目标是将图像中的每个像素分配给特定的语义类别。
为了改进语义分割的性能,可以采取以下方案:1. 使用更强大的模型:传统的语义分割模型如FCN、U-Net 等已经取得了一定的成果,但是它们的性能仍然有限。
可以尝试使用更强大的模型,如DeepLab、PSPNet等,这些模型通常具有更深的网络结构和更多的参数,能够更好地捕捉图像中的语义信息。
2. 引入上下文信息:语义分割通常需要考虑像素周围的上下文信息,以便更好地理解图像中的语义。
可以通过引入空洞卷积、空间金字塔池化等技术来增加模型对上下文信息的感知能力。
3. 多尺度融合:图像中的语义信息通常具有不同的尺度。
为了更好地捕捉不同尺度的语义信息,可以使用多尺度融合的方法。
例如,可以将不同尺度的特征图进行融合,或者使用金字塔结构来处理不同尺度的特征。
4. 数据增强:数据增强是提高模型性能的常用方法之一。
可以通过对训练数据进行旋转、缩放、平移等操作来增加数据的多样性,从而提高模型的泛化能力。
5. 结合其他任务:语义分割可以与其他任务结合,如目标检测、实例分割等。
通过引入其他任务的信息,可以提高语义分割的性能。
例如,可以使用目标检测的结果来指导语义分割的过程,或者使用实例分割的结果来提取更准确的语义分割边界。
6. 迁移学习:迁移学习是一种有效的方法,可以将在其他任务上训练得到的模型参数迁移到语义分割任务上。
通过利用已有的模型参数,可以加快模型的训练速度,并提高模型的性能。
7. 后处理:语义分割的结果通常需要进行后处理,以去除噪声、填充空洞等。
可以使用图像处理技术,如形态学操作、连通区域分析等,来对语义分割结果进行后处理,从而得到更准确的分割结果。
综上所述,通过使用更强大的模型、引入上下文信息、多尺度融合、数据增强、结合其他任务、迁移学习和后处理等方法,可以有效改进语义分割的性能。
python中超简单的字符分割算法记录(车牌识别、仪表识别等)
python中超简单的字符分割算法记录(车牌识别、仪表识别等)背景在诸如车牌识别,数字仪表识别等问题中,最关键的就是将单个的字符分割开来再分别进⾏识别,如下图。
最近刚好⽤到,就⾃⼰写了⼀个简单地算法进⾏字符分割,来记录⼀下。
图像预处理彩图⼆值化以减⼩参数量,再进⾏腐蚀膨胀去除噪点。
image = cv2.imread('F://demo.jpg', 0) # 读取为灰度图_, image = cv2.threshold(image, 50, 255, cv2.THRESH_BINARY) # ⼆值化kernel1 = cv2.getStructuringElement(cv2.MORPH_RECT, (7, 7)) # 腐蚀膨胀核kernel2 = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5)) # 腐蚀膨胀核image = cv2.erode(image, kernel=kernel1) # 腐蚀image = cv2.dilate(image, kernel=kernel2) # 膨胀确定字符区域考虑最理想的情况,图中的字符是端正没有倾斜歪曲的。
将像素灰度矩阵分别进⾏列相加、⾏相加,则在得到的列和、⾏和数组中第⼀个⾮ 0 元素索引到最后⼀个⾮ 0 元素索引包裹的区间即就是字符区域。
h, w = image.shape # 原图的⾼和宽list1 = [] # 列和list2 = [] # ⾏和for i in range(w):list1.append(1 if image[:, i].sum() != 0 else 0) # 列求和,不为0置1for i in range(h):list2.append(1 if image[i, :].sum() != 0 else 0) # ⾏求和,不为0置1# 裁剪字符区域# 求⾏的范围flag = 0for i, e in enumerate(list1):if e != 0:if flag == 0: # 第⼀个不为0的位置记录start_w = iflag = 1else: # 最后⼀个不为0的位置end_w = i# 求列的范围flag = 0for i, e in enumerate(list2):if e != 0:if flag == 0: # 第⼀个不为0的位置记录start_h = ielse: # 最后⼀个不为0的位置end_h = iprint(start_w, end_w) # ⾏索引范围print(start_h, end_h) # 列索引范围分割单个字符与分割全部字符区域同理,在⾏和数组中⾮ 0 元素索引的范围即是单个字符的区域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
语义分割结果后处理腐蚀膨胀连通
标题:语义分割结果后处理:腐蚀膨胀连通
引言:
语义分割是计算机视觉领域的重要任务,其目标是将图像中的每个像素分配给特定的语义类别。
然而,语义分割的结果往往存在一些噪声和不连续性,需要进行后处理来提高分割的准确性和连通性。
本文将介绍一种常用的后处理方法:腐蚀膨胀连通,以帮助读者更好地理解和应用语义分割技术。
一、语义分割简介
语义分割是计算机视觉中的一项重要任务,旨在将图像中的每个像素分配给特定的语义类别。
通过语义分割,计算机能够理解图像中不同物体的边界和区域,为图像理解、目标检测等应用提供基础。
二、语义分割结果的后处理需求
在进行语义分割后,我们经常会发现分割结果存在一些噪声、不连续或不完整的情况。
这些问题会影响后续图像分析和处理的准确性和效果。
因此,我们需要对语义分割结果进行后处理,以提高分割的质量。
三、腐蚀膨胀连通的原理
腐蚀膨胀连通是一种常用的语义分割结果后处理方法。
它基于形态学图像处理的概念,通过腐蚀和膨胀操作来消除噪声、填充空洞和
连通分割结果。
1. 腐蚀操作:
腐蚀操作是将图像中的每个像素点与其邻域像素点进行逻辑与运算,得到一个新的像素值。
腐蚀操作可以有效地消除图像中的小噪声和不连续区域,使分割结果更加清晰和连续。
2. 膨胀操作:
膨胀操作与腐蚀操作相反,将图像中的每个像素点与其邻域像素点进行逻辑或运算,得到一个新的像素值。
膨胀操作可以填充图像中的空洞,使分割结果更加完整和准确。
3. 连通操作:
连通操作是指将相邻的像素点归为同一个语义类别。
通过连通操作,可以消除分割结果中的孤立像素点,使分割区域更加连续和准确。
四、腐蚀膨胀连通的实现步骤
腐蚀膨胀连通的实现步骤如下:
1. 对语义分割结果进行腐蚀操作,消除噪声和不连续区域。
2. 对腐蚀后的结果进行膨胀操作,填充空洞。
3. 对膨胀后的结果进行连通操作,消除孤立像素点。
通过以上步骤,可以得到更加准确和连续的语义分割结果。
五、腐蚀膨胀连通的应用场景
腐蚀膨胀连通方法可以应用于各种语义分割任务中,例如目标检测、图像分析和场景理解等。
在实际应用中,我们可以根据具体任务和需求对腐蚀和膨胀的操作次数进行调整,以获得最佳的分割效果。
六、总结
语义分割是计算机视觉领域的一项重要任务,但分割结果往往存在一些噪声和不连续性。
为了提高分割的准确性和连通性,我们可以采用腐蚀膨胀连通的后处理方法。
该方法基于形态学图像处理的概念,通过腐蚀和膨胀操作消除噪声、填充空洞和连通分割结果。
腐蚀膨胀连通方法在各种语义分割任务中有广泛的应用,可以帮助我们获得更加准确和连续的分割结果,为后续的图像分析和处理提供更好的基础。
希望本文能给读者对语义分割结果后处理的腐蚀膨胀连通方法有所了解,并能在实际应用中取得良好的效果。