静力水准法沉降观测技术的今昔
地铁沉降监测中影响静力水准仪精度的因素分析

地铁沉降监测中影响静力水准仪精度的因素分析在地铁建设中,沉降监测是非常重要的环节,它可以帮助工程师了解地铁的变形情况,从而指导施工和维护工作。
在沉降监测中,静力水准仪是一种常用的测量仪器,但它的测量精度受到多种因素的影响。
本文将分析这些影响因素,以帮助读者更好地理解静力水准仪的测量特性。
地质条件地质条件是影响静力水准仪精度的重要因素之一。
地质条件主要包括土层结构、水文地质特征和地震活动情况。
在土层结构方面,土层的厚度、坚硬程度和渗透性都会影响仪器的水平调整和定位精度。
在水文地质方面,水位的变化、水压力和降雨量等都会对土壤产生影响,从而造成仪器读数误差。
在地震活动方面,地震活动会引起地下水位的变化和土层变形,从而影响静力水准仪的调整和读数精度。
仪器基座仪器基座也是影响静力水准仪精度的因素之一。
仪器基座是指支撑仪器的土台或人工基础,它的设计和施工质量会影响仪器的稳定性和读数精度。
基座应具有足够的稳定性和刚度,以防止环境中的干扰对仪器读数造成影响。
同时,基座还应具有良好的抗震能力,以保证仪器在地震发生时的稳定性。
环境干扰环境干扰也是影响静力水准仪精度的因素之一。
环境干扰主要包括温度变化、风速和震动等。
在温度变化方面,太阳的辐射能会导致基座和仪器的温度变化,从而造成读数误差。
在风速方面,风力会产生气动力,从而对仪器的水平调整和定位精度造成干扰。
在震动方面,车辆、行人和地震等震动都会对仪器读数造成较大的影响。
人为误差人为误差也是影响静力水准仪精度的因素之一。
人为误差主要指操作人员在使用仪器时产生的误差,如读数误差、调整不精确等。
为了降低人为误差,需要保证操作人员具有足够的操作技能和经验,并且严格按照操作规程进行操作。
同时,还需要定期进行仪器的校准和维护,以保证仪器的精度和稳定性。
结论综上所述,静力水准仪的精度受到多种因素的影响,如地质条件、仪器基座、环境干扰和人为误差等。
为了保证沉降监测的准确性和可靠性,需要对这些因素进行全面的分析和控制。
静力水准系统在沉降监测中的应用
静力水准系统在沉降监测中的应用胡云龙;汪大超【摘要】静力水准自动化监测系统的发展带来了新一轮的工程革命,其高精度、实时化、自动化的特性对基坑沉降的监测管理带来巨大便捷.为研究静力水准系统在沉降监测中的应用效果,通过分析基坑沉降工程中静力水准系统的自动化监测数据,并与人工监测数据进行比对,得到其自动化监测精度较高,能及时反映工程施工对附近设施的影响,可应用于工程实践的结论,最后总结了静力水准工程运用中出现的问题和解决方案.【期刊名称】《城市勘测》【年(卷),期】2017(000)003【总页数】4页(P154-157)【关键词】静力水准系统;沉降监测;深基坑工程;自动化监测【作者】胡云龙;汪大超【作者单位】天津市测绘院,天津 300381;天津市测绘院,天津 300381【正文语种】中文【中图分类】P258随着科技发展的突飞猛进,自动化施工监测技术应运而生,为城市建设与管理带来巨大便捷和经济效益。
而基坑工程的沉降监测,当前仍以传统的监测方法作为主要技术手段,其工作效率低、监测难点大、管理程度低,不能实时反馈数据,影响施工决策,对工程的施工监测和运营监护都提出了严峻的挑战[1]。
因此,探索出能适应复杂多变的基坑环境的新技术迫在眉睫。
静力水准系统,是一种应用于监测多点相对沉降的监测系统[2]。
其由精密液位测量元件组成,使用连通管将各个独立的静力水准仪连接成统一系统,当监测点高程变化导致仪器内液位同步变化时,由仪器内浮子或其他传感设备测出其液位变化量,进而能得到出各仪器之间的相对高程变化[3]。
具有可靠性高、安装维护方便、适用范围广等特点[4],是理想的变形测量仪器。
静力水准监测技术作为自动化监测手段,在城市建设与管理中的应用研究成果可在市政重大工程的建设与管理中得到广泛应用[5],具有广阔的应用前景。
同时其实时的监测成果,将有效及时地指导施工,节约施工成本,具有很好的经济效益和社会效益,可应用于深基坑的沉降监测工程。
地基基础沉降观测方法综述

2、静力水准观测
即利用连通传统法和改进法。
深标点水准仪适合于硬土层,但一个钻孔只能布置一个深标点,若干个测点则需要若干个钻孔,如果是软基,一般采用磁环式沉降仪。
沉降观测按部位可分为表层沉降观测、深层(分层)沉降观测和断面沉降观测。经过多年的发展,沉降观测方法不断完善,观测仪器类型也越来越多,但不同的观测方法和观测仪器适用于不同的工程地质条件。为了便于交流,本文对现行沉降观测方法及仪器进行总结,以供参考。
二、表层沉降观测
很多工程只要求观测地基表层沉降或建筑物在地表以上某点的沉降,这些沉降统称为表层沉降。表层沉降观测方法按观测手段不同可分为多种:
地基基础沉降观测方法综述
摘要:通过对地基基础的沉降观测可及时掌握沉降大小及其变化规律,很多工程均设置了沉降观测。不同的观测方法适用的工程条件不同,本文对目前常用的表层沉降、深层沉降和断面沉降观测方法进行了全面的总结.
关键词:地基基础沉降;表层沉降;深层沉降;断面沉降
一、前言
地基在建筑物荷载作用下都会产生沉降,如果地基沉降,尤其是差异沉降,超出建筑物允许范围,轻则影响建筑物的正常使用,重则导致房屋开裂倾斜、路基沉陷、堤坝坍塌等。为了及时了解地基在建筑物荷载作用下的沉降以及沉降变化趋势,以便提前采取有效措施,防止事故的发生,很多工程都需要设置沉降观测。如果工程建在软土地基上,则要进行预压加固来消除地基沉降,加固过程中也必须进行沉降观测,以便及时分析地基的加固程度,确定是否达到设计要求再进行卸载。一些现场试验,如静载试桩、复合地基载荷试验等,也需要获得沉降观测结果,才能根据曲线确定承载力。通过沉降观测可积累经验资料,反算地基变形参数,为今后的工程设计计算提供依据。
基于静力水准测量技术的地铁隧道结构沉降监测

42 信息化测绘基于静力水准测量技术的地铁隧道结构沉降监测赵栋 张耀国 刘万松 杨立新(中材地质工程勘查研究院有限公司,北京 100102)摘 要:针对传统使用水准仪监测地铁隧道结构沉降过程中存在的测量效率低、人力投入多以及测量精度易受影响等问题,研究介绍了一种可用于地铁沉降全天候监测的静力水准测量方案,可实现地铁隧道结构沉降的全天候不间断远程监测与采集,通过数据分析能够发现地铁隧道结构的早期隐患,从而保障地铁隧道施工及地铁运营安全。
通过工程实例,验证静力水准测量技术在地铁隧道结构沉降监测中具有较好的应用效果。
关键词:结构沉降;地铁隧道;静力水准仪;远程采集1 引言随着经济的发展与农村人口向城市流动的加速,城市公共交通压力越来越大,许多城市开始修建地下轨道交通系统来应对日益增多的通勤人次。
地铁运力大、高效、便捷,在城市交通系统中发挥着巨大作用,但是因为运行于地下封闭环境,隧道结构在交变载荷作用下容易造成稳定性下降,进而产生安全风险。
传统模式下,使用水准仪测量隧道结构沉降情况需要在列车停运期间进行,作业窗口较短,且无法实现不间断的连续、实时监测。
随着传感器技术和在线监测技术的不断进步和发展,静力水准自动化监测技术逐渐在隧道监测中得到应用和推广,该技术实现了地铁隧道监测由人工向自动化的转变,同时,不断升级的传感检测技术与远程在线监测技术进一步优化了静力水准监测精度及兼容性,使其在现实工程中的应用空间得到进一步拓展。
2 静力水准测量的作用机理与组成2.1 静力水准测量的作用机理静力水准仪由液缸、浮筒、精密液位计、保护罩等部件组成,基本技术原理为物理学中的连通液原理,将多个连通器的储液罐连接,根据连通器水平面相同的原理,所有连通器的储液罐液面应处在同一水平面,如果某个监测点发生沉降则通过计算储液的变化高度,得出各个静力水准仪之间的相对变化量,进而获取监测点的相对差异沉降信息。
将某测区分为n 个沉降观测点,在各沉降观测点位置分别布设静力水准测量仪,使用连通管将所有静力水准测量仪的储液罐连通并进行相应的调校,记录每个静力水准测量仪的储液罐液面高度,静力水准测量仪安装高程如图1所示。
静力水准系统在水工建筑物沉降监测中的应用
1 概述
随着社会经济的快速发展以及水利行业的发 展需求,越 来 越 多 的 泵 站、水 闸 及 大 坝 等 水 工 建 筑 物在各种苛刻地质环境下建成,对安全监测的精度 及时效性提出了越来越高的要求。在水工建筑物 安全监测 中,垂 直 位 移 量 是 最 重 要 的 监 测 内 容,是 判断工程结构是否稳定的重要指标。而传统的人 工观测,不仅工作效率低,受环境限制大,还不能实 时反馈数 据,对 工 程 安 全 运 行 提 出 了 严 峻 的 挑 战。 因此具有 自 动 化 性 能 好、够 实 时、高 频 次 及 精 度 高 等优点的静力水准系统逐渐广泛应用于水工建筑 物沉降监测中。
2019年 12月 Dec.2019
江 苏 水 利 JIANGSUWATERRESOURCES
水利工程管理及防汛防旱 55
静力水准系统 在水工建筑物沉降监测中的应用
侯 煜,廖 月
(江苏省泰州引江河管理处,江苏 泰州 225321)
摘要:静力水准系统具有自动化性能好、够实时、高频次及精度高等优点,被广泛运用于水工建筑 物沉降的监测中。通过介绍静力水准系统工作原理,结合在高港枢纽泵站的应用,分析系统监测 成果。 关键词:沉降监测;测量原理;应用分析 中图分类号:TV131.66 文献标识码:B 文章编号:1007 7839(2019)12 0055 04
(2)静力水准系统观测精度高、自动化性能好, 同时能够准确和及时反应建筑物的变形情况。
(3)静力 水 准 系 统 在 实 际 安 装 过 程 中,受 到 外 部环境的 制 约,只 能 按 照 固 定 的 线 路 铺 设,具 有 一 定的局限 性;同 时,系 统 的 数 据 传 输 信 号 受 到 天 气 及距离的 影 响,需 要 在 前 期 设 计 中 综 合 考 虑,将 其 对静力水准系统影响降到最低。
建筑物的沉降观测综述
建筑物的沉降观测综述[摘要]本文论述建筑物沉降观测方法、成果整理和成果分析。
[关键词]沉降沉降观测沉降曲线图在建筑物的施工和初期使用阶段,建筑物本身的荷载和外力的作用会使建筑物发生一定的沉降和变形,而且可能导致周边临近的建筑物发生沉降和变形。
为了保证建筑物的安全,保证人民生命财产免遭损失,有必要对建筑物和临近地区的不同位置进行高程观测,以便掌握沉降量变化的规律。
这便是建筑物沉降观测。
建筑物沉降观测是建筑测量的一个重要环节。
对于高层建筑、重要厂房的柱基以及主要设备基础、连续性生产和受震动较大的设备基础、工业炼钢高炉、高大的电视塔、人工加固的地基、回填土、地下水位较高或大孔土地基的建筑物应该进行系统的沉降观测。
建筑物沉降观测目前普遍采用水准测量的方法进行观测,此外,全站仪加反射片的沉降观测[1]、GPS沉降观测[2]方法在实际工程中都得到应用。
下文就建筑物沉降观测水准测量的方法、成果整理和成果分析三方面展开论述。
一、沉降观测的方法1. 水准点的布置水准点的布设,采用永久性的水准点布置要求布置,按照二、三等水准点标石规格埋设标志。
为了保证水准点的稳定性,要求水准点不应该少于3个,以组成水准点网,各个水准点之间互相校核。
水准点应该埋设在基础压力影响范围以及震动影响范围以外的安全地带,一般距离基坑开挖边线50米左右。
水准点应该离开铁路、公路、地下管线和滑坡地带至少5米的距离。
为了防止冰冻影响,水准点埋设深度至少要在冰冻线以下0.5米。
为了保证观测精度,水准点与观测点之间的距离不应该大于100米。
2. 观测点的布置进行沉降观测的建筑物观测点的布置与建筑物或设备基础的结构、大小、荷载和地质条件有关。
沉降观测点要埋设在最能反映沉降特征且便于观测的位置。
在民用建筑中,一般沿着建筑物的四周,每隔6~12米布置一个观测点,在房屋转角、沉降缝或伸缩缝的两侧、基础形式改变处及地质条件改变处也应该布设观测点。
当房屋宽度大于15米时,还应该在房屋内部纵轴线上和楼梯间布设观测点。
静力水准测量法在房建工程沉降观测中的应用

静力水准测量法在房建工程沉降观测中的应用摘要:近年来,建筑项目逐步增多,此类项目具备基坑规模大、主体结构复杂的特点,给建筑项目施工带来了一定安全隐患。
在对建筑物进行沉降观测及其预测的过程中,相关单位首先需要对工程概况做到全面明确,然后以此为依据,结合相应的观测与计算方法来进行沉降观测方案的合理制定,并做好观测点的布设以及质量精度评价工作,最后再对具体的沉降情况进行分析。
通过这样的方式,才可以确保建筑物沉降观测、预测的效果,为相应的处理措施应用提供有力支撑。
关键词:静力水准测量法;房建工程;沉降观测;应用引言近年来,随着我国建筑行业的蓬勃发展和城镇化水平的不断提高,、超建筑在城市中越发普遍。
然而,随着楼层的不断增加、荷载逐渐增大,建筑物的沉降量逐渐加大。
为了建筑物建设与运营的安全,在建筑物施工过程中必须对其沉降量进行监测,以便及时发现问题并做相应处理,保证建筑物的正常使用寿命和安全性。
建筑物发生沉降的原因既有外部因素的影响,也有内部因素的制约,归纳起来主要包括地基基础处理不合理、建筑场地选址不当、规划不合理、基础方案失误等。
1变形监测的特点1.1周期性重复观测变形观测的主要任务是周期性地对观测点进行重复观测,以求得其在观测周期内的变化量。
周期性是指观测的时间间隔是固定的,不能随意更改;重复性是指观测的条件、方法和要求等基本相同。
在观测时,每一期观测应等精度进行,测量人员、仪器、作业条件都应相对固定。
比如在进行沉降观测时,要求在规定的日期,按照设计的路线和精度进行观测,水准网形原则上不准改变,测量仪器一般也不能更换,对于某些测量要求较高的情况,连测站位置也应基本不变。
1.2多学科综合分析变形监测的分析涉及的学科领域较多,比如地质学、工程力学、岩土知识、土木工程等,还会涉及计算机软件编程、图形图像处理知识。
2静力水准测量法在房建工程沉降观测中的应用2.1测量原理静力水准仪系统是测量高差及其变化的精密仪器,所有测点的垂直位移均是相对其中一点变化,该点的垂直位移是相对恒定的,以便能精确计算出静力水准仪系统各测点的沉降变化。
沉降观测技术

沉降观测技术嘿,咱今儿就来聊聊沉降观测技术!你可别小瞧了它,这玩意儿就像是给建筑物做体检一样重要呢!想象一下,那些高楼大厦、桥梁道路,它们就像是一个个巨人屹立在那里。
要是没有沉降观测技术,咱怎么能知道这些巨人是不是稳稳当当的呢?要是它们哪天突然晃悠起来,那可不得了哇!沉降观测技术啊,就像是一双敏锐的眼睛,时刻盯着建筑物的细微变化。
通过各种仪器和方法,准确地测量出建筑物在不同时间的沉降情况。
这可不是随便测测就行的,得非常精细、非常专业呢!比如说吧,要选择合适的观测点,这就跟给病人找穴位似的,得找得准准的。
然后呢,还得按照规定的时间和频率去观测,不能三天打鱼两天晒网的。
这就好像是给巨人做定期检查,一次都不能马虎。
而且啊,沉降观测技术可不是孤立存在的。
它和建筑设计、施工都有着紧密的联系呢!在设计的时候就得考虑到沉降的问题,施工过程中更是要严格把控质量,不然等建成了再发现沉降有问题,那可就麻烦大啦!你看那些质量不过关的建筑,可能一开始没啥问题,但是时间一长,就开始这儿歪那儿斜的,多吓人呐!这就是沉降观测没做好的后果呀。
沉降观测技术还得不断发展和进步呢!随着科技的不断进步,新的仪器和方法也在不断涌现。
就像我们的手机一样,一代比一代先进。
现在的沉降观测技术可比以前厉害多了,测量得更准,速度也更快。
咱可不能小看了这沉降观测技术,它可是保障我们生活安全的重要一环呢!没有它,我们怎么能安心地在那些高楼大厦里工作、生活呢?它就像是一个默默守护的卫士,虽然不显眼,但是却至关重要。
所以说啊,沉降观测技术真的是非常非常重要的呀!咱可得重视起来,让那些建筑物都稳稳当当的,这样我们才能安心呀!你说是不是这个理儿?。
精密水准测量在沉降监测中的运用
矿业与煤炭学院《精密水准测量在地面沉降监测中的应用》班级:13级测绘一班姓名:张世杰学号:1372143115指导教师:孙同贺精密水准测量在地面沉降监测中的应用摘要:地面沉降是自然及人类活动引起地层的压缩、变形,导致地表标高发生局部变形的运动。
地面沉降监测的方法中,利用精密水准测量的方法完成地面沉降监测工作,具有前期投入小、施工过程简单,经济效益良好的特点,能够为区域地质灾害的研究与预防提供了可靠的基础资料。
关键词:地面沉降;精密水准测量;变形监测引言地面沉降又称为地面下沉或地陷,随着矿产资源的开采(油、气、水、金属矿、煤、岩盐等)、地下及地表构造物的建设以及地震等因素的影响,引起地层的压缩、变形,导致地表标高发生局部变形的运动。
随着对地面沉降的深入研究,各种大范围地表沉降监测手段不断涌现。
武百超、邹徐文等利用 GPS/INSAR数据融合的方法完成了大范围地表沉降监测的工作;中科院地质与地球物理研究所利用 GPS 对天津市市区地面沉降进行了长期的观测;北京市通过建设期、动态监测。
以上提到的大范围地面沉降方法针对的监测对象多为特大型、巨大型城市,其观测系统建立较为复杂,成本压力巨大,不太适合中等城市的实际需求。
精密水准测量作为传统的地面沉降监测方法,具有前期投入小、施工过程简单,精度能够满足工程设计需要的特点。
随着电子水准仪的不断普及,水准测量中人为误差得到减小,劳动强度大大降低,为精密水准测量的大量应用创造了良好的技术条件。
本文以临汾市尧都区地面沉降监测为例,介绍精密水准测量在地面沉降监测中的具体应用。
1 地面沉降监测网的布设方案1.1布设原则一个区域内的地面沉降监测一般要求采用统一的布设标准,通过定期观测,确定区内的地面沉降量,为科学合理决策提供可靠的理论依据。
临汾市地面沉降监测网采用 1985 国家高程基准,按照二等水准的要求统一布设,观测周期为一年,之前已进行了两次观测。
1.2水准网布设水准网布设前,对临汾市尧都区各地面沉降区进行实地调查,取得第一手地面沉降资料,结合该区域地质、水文、地震、气象、土壤冻结及地下水位深度等资料,进行了水准监测网的设计。
沉降观测宜采用方法
沉降观测宜采用方法沉降观测是土木工程中一项重要的施工监测技术,用于监测地基的沉降变化情况。
在工程实施过程中,地基沉降可能会引发建筑物的不稳定性和安全性问题,因此进行沉降观测可以及时发现并采取相应的措施,保证工程的安全和稳定性。
沉降观测的方法可以根据具体情况选择。
下面将介绍几种常用的沉降观测方法:1.经验法:这是一种简单直观的方法,通过实地观察和测量建筑物或构筑物的沉降情况。
例如,在施工过程中,可以通过长规尺量测建筑物的沉降量。
然而,由于该方法依赖于人工观测和测量,因此无法提供准确的数据,只能用作初步的参考。
2.水准仪法:利用水准仪进行沉降观测是一种常见的方法。
通过设置一个基准点,然后在建筑物或构筑物上设置水准点,利用水准仪测量这些点之间的高差变化,进而确定沉降量。
这种方法具有精度高、可靠性好的特点,适用于观测较小范围的工程。
3.全站仪法:全站仪是一种先进的测量设备,具有高精度、高速度和高效率等优点。
它可以通过自动跟踪目标和测角、测距等功能,实时测量和记录建筑物或构筑物沉降的情况。
全站仪法适用于大范围、长时间的沉降观测,能够提供精确的沉降数据。
4.测斜仪法:测斜仪是一种经济实用的沉降观测设备。
通过将测斜仪安装在建筑物或构筑物上,测量倾斜角度的变化,从而推测出沉降量。
测斜仪法适用于较小的倾斜变化,操作简便,成本相对较低。
5.激光测距法:激光测距法是一种非接触式的测量方法,利用激光测距仪对建筑物或构筑物的某一点进行测量,以确定其沉降量。
这种方法具有高精度、高效率和高自动化的特点,能够快速、准确地获取沉降数据,适用于大范围、复杂结构的沉降观测。
除了选择合适的观测方法,进行沉降观测还需要考虑以下几点:1.观测频率:沉降观测的频率应根据具体工程情况和建筑物性质确定。
一般情况下,初始阶段观测频率较高,随着时间的推移,观测频率可逐渐减少。
2.观测点位选择:观测点位的选择应覆盖整个工程范围,并重点关注可能存在沉降问题的区域。
沉降观测现状

沉降观测现状1. 引言沉降观测是土木工程中非常重要的技术手段,用于监测土地表面或工程结构的沉降变化。
沉降观测的目的是为了评估土地或结构物的稳定性,确保其正常运行和使用。
本文将介绍沉降观测的现状,包括观测方法、仪器设备和数据处理等方面的内容。
2. 沉降观测方法目前常用的沉降观测方法主要包括:2.1. 建筑物内部观测法建筑物内部观测法是通过在建筑物内部安装沉降点,通过测量设备测量沉降点的垂直位移。
这种方法可以较好地掌握建筑物的沉降情况,但无法观测到土地表面的沉降变化。
2.2. GPS观测法GPS观测法是利用全球定位系统(GPS)进行沉降观测。
通过安装GPS接收机,收集用于计算沉降的卫星信号数据,并进行分析处理。
GPS观测法具有高精度和大范围观测的优点,适用于大面积土地的沉降监测。
2.3. 测量网观测法测量网观测法是在观测区域内布设一定数量的控制测点,通过测量网点与控制测点之间的距离变化,来推算出沉降情况。
这种方法需要在观测区域内铺设测量网,对测量点的布设和观测频率有一定的要求。
3. 沉降观测仪器设备沉降观测中使用的仪器设备主要有:3.1. 高精度水准仪高精度水准仪是用于测量垂直位移的仪器。
它通过水平仪和测角装置来确定水准仪的水平方向,再通过测量高度差来确定测点的垂直位移。
高精度水准仪通常需要在放置过程中考虑周围环境的影响,如温度、磁场等。
3.2. 全站仪全站仪是一种综合测量仪器,可以实现三维坐标的测量。
在沉降观测中,全站仪可以用来测量沉降点的位置坐标,并结合其他观测数据进行分析和计算。
3.3. GPS接收机GPS接收机是用于接收和解算卫星信号的设备。
在GPS观测法中,GPS接收机是至关重要的设备,通过收集卫星信号数据进行沉降计算。
目前市场上有许多高精度的GPS接收机可供选择,可以根据具体需求选择合适的型号和品牌。
4. 沉降数据处理沉降数据处理是沉降观测中非常重要的一步,它对提取有用的信息和分析沉降趋势起着关键作用。
静力水准仪在运营期高速铁路路基沉降观测中的运用
静力水准仪在运营期高速铁路路基沉降观测中的运用发布时间:2022-11-30T07:41:47.265Z 来源:《新型城镇化》2022年22期作者:谢建帮[导读] 随着城市的不断发展,穿越城市区域的高速铁路周边不断开发建设,在周边建设过程中,存在着诸多近、大、深基坑,在这些基坑施工过程中,势必会造成运营期高速铁路路基发生沉降,严重影响列车运行安全。
因此,如何实时监控高速铁路路基沉降,信息化指导基坑施工对确保运营期高速铁路安全很有必要。
受高速铁路运营时间限制,常规人工沉降监测已无法满足要求,而静力水准仪自动化沉降监测系统以实时化、自动化、高效化及高精度等特点具有较好应用前景。
谢建帮柳州市勘察测绘研究院有限公司广西柳州 545006摘要:随着城市的不断发展,穿越城市区域的高速铁路周边不断开发建设,在周边建设过程中,存在着诸多近、大、深基坑,在这些基坑施工过程中,势必会造成运营期高速铁路路基发生沉降,严重影响列车运行安全。
因此,如何实时监控高速铁路路基沉降,信息化指导基坑施工对确保运营期高速铁路安全很有必要。
受高速铁路运营时间限制,常规人工沉降监测已无法满足要求,而静力水准仪自动化沉降监测系统以实时化、自动化、高效化及高精度等特点具有较好应用前景。
关键词:高速铁路路基;沉降观测;静力水准仪前言铁路路基暴露在室外,加之我国地域广阔,地形、地质、水文、气候等情况复杂:路基边坡和坡脚受坡面雨水冲刷、日晒雨淋将引起土的干湿循环、气温变化将引起土的冻融变化、河水对边坡或坡脚处地基不断的冲刷和淘刷等,使路基常年处于升降动态循环之中,路基附加应力受其很大影响。
路基填料级配不良、排水失效、过渡段碎石级配失效或不养生、路基横向碾压、填料含水率超标等将引起路基沉降。
铁路两旁新修建的建筑物尤其是特大型建筑深基坑开挖也会对路基产生影响,所以铁路路基沉降在一定意义上讲不可避免。
但过大的变形沉降将直接影响行车安全,所以必须对高速铁路路基沉降加以防治。
建筑工程中的沉降与基础监测技术

实时监测
通过实时监测系统,对建筑工程 的沉降和基础进行实时监测,及 时发现异常情况并采取相应措施 。
预警系统
建立预警系统,根据监测数据自 动判断安全状况,及时发出预警 信息,提高安全防范能力。
多源数据融合技术
多传感器融合
工程概况
某大型桥梁位于河流 之上,连接两岸交通 。
桥梁建设过程中涉及 深基坑开挖、桩基施 工等复杂工程。
桥梁采用混凝土结构 ,主跨长度达到100 米。
监测方案设计
监测点布设
在桥梁的四个角点及中点设置沉降监测点,同时 在桩基周围设置水平位移监测点。
监测频率
在施工期间每2天监测一次,运营期间每周监测一 次。
04 沉降与基础监测技术的挑 战与解决方案
数据处理与分析的挑战
01
数据量大
建筑工程中产生的监测数据量庞 大,需要高效的数据处理和分析 方法来处理。
02
数据噪声干扰
03
数据关联性分析
在实际监测过程中,数据可能受 到多种噪声干扰,影响结果的准 确性。
不同监测项目之间存在复杂的关 联性,需要进行深入的数据关联 性分析。
沉降与基础监测技术概述
• 请输入您的内容
02 沉降与基础监测的主要方 法
沉降监测方法
水准测量法
通过设置水准点,定期测量建筑物沉降的变 化量,以获取沉降数据。
静力水准仪法
利用连通管原理,通过液面高度变化来测量 建筑物沉降。
全自动测量法
利用GPS、遥感等技术进行全自动、高精度 的沉降监测。
倾斜仪法
监测方法
采用高精度水准仪和全站仪进行沉降和水平位移 监测。
静力水准仪在深基坑周边建筑物沉降监测中的应用
静力水准仪在深基坑周边建筑物沉降监测中的应用发布时间:2022-12-19T07:39:59.467Z 来源:《工程建设标准化》2022年15期8月8批次作者:谢嘉歆,陈东浩,陈家俊[导读] 综述了静力水准仪高灵敏度谢嘉歆,陈东浩,陈家俊深圳市房屋安全和工程质量检测鉴定中心,广东深圳 518000摘要:综述了静力水准仪高灵敏度、高精度、高稳定性的优点,结合现场监测项目的应用,对静力水准仪工作原理、安装方法及注意事项进行阐述,并通过人工水准测量数据与静力水准数据进行对比分析,结果得出在满足规范要求前提下,静力水准仪可胜任二等水准测量进行基坑周边建筑物沉降监测,解决人工监测的弊端。
关键词:静力水准仪;二等水准;基坑监测;建筑物沉降中图分类号:TU473.1 文献标识码: A 文章编号:Application of static level in settlement monitoring of buildings around deep foundation pitXie Jiaxin,Chen Donghao,Chen Jiajun(Shenzhen Building Safety and Construction Quality Testing and Appraisal Center, Shenzhen University, Guangdong 518000, China; )Abstract: This paper summarizes the advantages of high sensitivity, high accuracy and high stability of the static level, combined with the application of field monitoring projects, this paper expounds the working principle, installation method and precautions of the static level, and compares the manual leveling data with the static leveling data. The results show that the static level can replace the second-class leveling to monitor the settlement of buildings around the foundation pit on the premise of meeting the requirements of the specifications, Solve the disadvantages of manual monitoring. Key words: Static level; Second class level; Foundation pit monitoring; Building settlement0引言随着城市高层建筑建设的发展,出现越来越多的深基坑,特别是旧城区项目周边老旧建筑物复杂,基坑施工过程中存在建筑物结构不均匀沉降或变形失稳等安全事故,常规采用精密水准测量需逐点读数,观测时间长,需专业技术人员及仪器,若遇上存在测点多,现场周边环境复杂或其他恶劣天气而导致监测数据不齐全,监测效率低,精度低,数据无法实时掌握等弊端[1],静力水准仪应用在建筑物变形监测上,可提高监测精度及工作效率[2],高频率的数据采集保证监测数据实时性,本文凭借静力水准仪高灵敏度、高精度、高稳定性的优点[3],通过人工水准测量数据与静力水准数据进行对比分析,结果得出在满足规范要求前提下,静力水准仪可胜任二等水准测量进行基坑周边建筑物沉降监测,解决人工监测的弊端。
静力水准仪在海上平台沉降监测中的应用
- 12 -科技经济前沿科技经济导刊 2016.35期静力水准仪在海上平台沉降监测中的应用文世鹏 丛 军 张锡斌(中石化胜利油田分公司海洋采油厂 山东 东营 257237)埕岛油田中心一号平台是中石化胜利油田埕岛油田南部油区的集中处理平台,具有脱水、污水处理、注水功能。
目前处理液量8755方/天,油量1128方/天。
其生产平台为四腿式自升平台(原设计为移动平台现改为固定式),平台长50m、平台宽20m、型深4m。
中心一号平台1995年投产,2009年进行了延寿改造,延寿期5年,2014年10月到期。
在2013年,对中心一号生产平台进行二次延寿评估时发现生产平台2#、3#钢桩承载力不能满足规范要求,存在桩基承载力不足的安全隐患。
主要原因为:(1)平台就位设计水深8m,受海底冲刷的影响,目前实测11.5m,海底涂层被冲刷3.5m,导致四根桩腿侧摩阻力降低。
(2)四根桩腿入泥深度较浅(当前11.4-13.1m ),无法达到最佳持力层桩端持力层。
对比2016年与2013年测量数据,排除误差后该平台3年内至少存在2.9~5.7cm 的沉降量。
平台无有效手段监控桩腿的实际沉降,无法对平台短时间内发生快速沉降做出报警,恶劣海况过后只能采用人工搭设脚手架测量平台标高,存在测量精度低、时效性差的问题,严重影响平台安全生产及应急决策。
为了有效监测平台沉降,并对短时间内发生快速沉降做出有效预警,平台业主单位通过现场调研、并综合设计、科研单位建议,提出以CB11C 平台为基准点,在11C 平台、中心一生产平台四个固桩室桩腿上安装高精度静力水准仪(仪器标称精度0.1mm),实时监测平台桩腿沉降情况。
1静力水准测量原理如图1所示为静力水准测量原理及系统的概念图,该系统主要由静力水准器、连通管、磁位移传感器、数据采集仪(包含GPRS 模块)、web 显示屏和远程数据终端等部分组成。
图1 静力水准测量原理及系统的概念图系统的工作原理为:在拟监测标高的生产平台的4个桩腿上安置静力水准器,在井口平台的桩腿上设置基准点,在基准点上也安置另一个静力水准器,各水准器之间采用连通管相连,这样,因地球重力作用使得水准器的液面高度永远保持相同,当监测点的标高变化时,监测点处的水准器的液面高度会产生变化(液面上升或下降),同时基准点处的水准器的液面也会随之变化(液面下降或上升),在水准器的上部各安装一个磁位移传感器,从而液面高度的变化值可由磁位移传感器精确地探测到,然后由与磁位移传感器相连的数据采集仪采集,由采集仪自带的软件根据两液面高度变化值自动推算出监测点处的标高变化量。
精密水准在城市区域地表沉降测量浅析
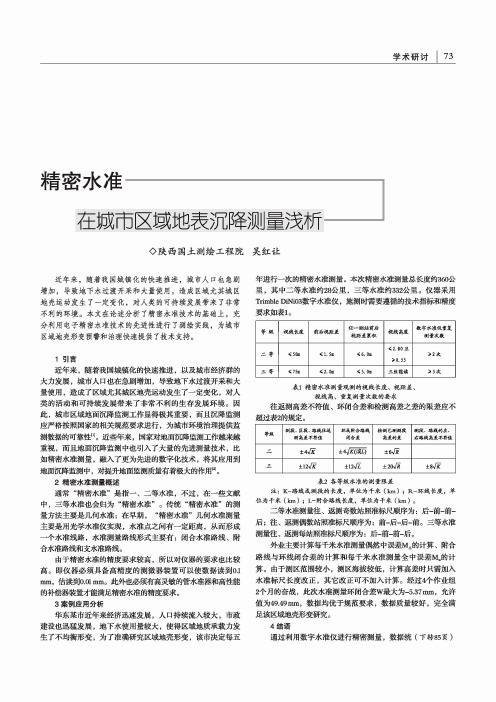
精密水准在城市区域地表沉降测量浅析◊陕西国土测绘工程院吴红让近年来,随着我国城镇化的快速推进,城市人口也急剧 增加,导致地下水过渡开采和大量使用,造成区域尤其城区 地売运动发生了一定变化,对人类的可持续发展带来了非常 不利的环境。
本文在论述分析了精密水准技术的基础上,充分利用电子精密水准技术的先进性进行了测绘实践,为城市 区域地壳形变预警和治理快速提供了技术支持。
1引言近年来,随着我国城镇化的快速推进,以及城市经济群的 大力发展,城市人口也在急剧增加,导致地下水过渡开采和大 量使用,造成了区域尤其城区地壳运动发生了一定变化,对人 类的活动和可持续发展带来了非常不利的生存发展环境。
因此,城市区域地面沉降监测工作显得极其重要,而且沉降监测 应严格按照国家的相关规范要求进行,为城市环境治理提供监 测数据的可靠性™。
近些年来,国家对地面沉降监测工作越来越 重视,而且地面沉降监测中也引入了大量的先进测量技术,比 如精密水准测量,融入了更为先进的数字化技术,将其应用到 地面沉降监测中,对提升地面监测质量有着极大的作用' 2精密水准测量概述通常“精密水准”是指一、二等水准,不过,在一些文献 中,三等水准也会归为“精密水准”。
传统“精密水准”的测 量方法主要是几何水准:在早期,“精密水准”几何水准测量 主要是用光学水准仪实现,水准点之间有一定距离,从而形成 一个水准线路,水准测量路线形式主要有:闭合水准路线、附 合水准路线和林准路线。
由于精密水准的精度要求较高,所以对仪器的要求也比较 高。
即仪器必须具备高精度的测微器装置可以使数据读到0.1 mm,估读到0.01 mm。
此夕h*必须有高灵敏的管水准器和高性能的季h#器装置才能满足精密水准的精度要求。
3案例应用分析华东某市近年来经济迅麟展,人口持续流入较大,市政 建设也迅猛发展,地下水使用量较大,使得区域地质承载力发 生了不均衡形变,为了准确研究区域地壳形变,该市决定每五年进行一次的精密水准测量。
沉降观测计算方法
沉降观测计算方法以下是 7 条关于沉降观测计算方法的内容:1. 嘿,你知道吗,沉降观测计算方法里有个很关键的“水准测量法”!就好比你量身高,要找个准确的尺子一样。
咱得选好基准点,然后一点一点去测量高差,这多重要啊!比如在建造高楼的时候,要是没搞准这个,那不就像盖歪了的积木,随时可能倒下,多吓人呀!2. 沉降观测计算方法里的“三角高程测量法”也是很牛的呢!这就像是爬山,你要知道从山脚到山顶的高度变化。
咱在不同的位置观测,通过角度和距离来算出沉降情况。
就说修个大桥吧,靠这个方法才能保证桥面稳稳当当呀,你说是不是很关键?!3. 还有“GPS 测量法”哦,这简直就是沉降观测的高科技武器啊!想象一下,就像卫星在天上帮咱盯着地面的沉降情况。
比如监测一大片地区的地面变化,靠它就能快速又准确地知道啦!难道你不想了解得更清楚吗?4. 沉降观测计算方法里的“液体静力水准测量法”很神奇的哟!就好像看水在瓶子里的高度变化一样。
对于一些要求特别精细的工程,它可少不了呢!就像制造精密仪器,一点点的沉降偏差都不行,这时候它就派上大用场啦,你说厉害不厉害?5. 嘿呀,“基准线法”在沉降观测计算方法里也有一席之地呀!这就好像拉一条笔直的线,看其他东西和这条线的关系。
在铁路轨道铺设的时候,没有它怎么能保证轨道平整呢,对不对?6. 沉降观测计算方法中的“InSAR 技术”可是很牛叉的存在呢!就好比给大地拍了个超级清晰的“照片”,然后分析出沉降信息。
比如监测地震后的地面变形,靠它就能快速找到问题所在啦!你能想象没有它会怎样吗?7. 沉降观测计算方法真的好多啊,每一种都有其独特的用处!就像一个强大的工具包,根据不同的情况选择合适的方法。
不管是大型建筑还是小工程,都得靠它们来确保安全稳定呀!所以呀,可得好好掌握这些方法,才能让一切都稳稳当当的不是吗?。
沉降观测的发展与应用
沉降观测的发展与应用摘要:介绍了沉降观测的相关概念和数字水准仪的使用,以及沉降观测的整个工作流程,并展望了沉降观测未来的发展。
实践证明,新一代精密数字水准仪完全能满足沉降观测的要求,并对沉降观测的发展起到了积极的推动作用。
关键词:数字水准仪;沉降观测;观测周期;数据分析随着工业与民用建筑业的发展,各种复杂而大型的工程建筑物日益增多,工程建筑物的兴建,改变了地面原有的状态,并且对于建筑物的地基施加了一定的压力,这就必然会引起地基及周围地层的变形。
为了保证建(构)筑物的正常使用寿命和建(构)筑物的安全性,并为以后的勘察设计施工提供可靠的资料及相应的沉降参数,建(构)筑物沉降观测的必要性和重要性愈加明显。
现行规范也规定,高层建筑物、高耸构筑物、重要古建筑物及连续生产设施基础、动力设备基础、滑坡监测等均要进行沉降观测。
特别在高层建筑物施工过程中,应用沉降观测加强过程监控,指导合理的施工工序,预防在施工过程中出现不均匀沉降,及时反馈信息,为勘察设计施工部门提供详尽的一手资料,避免因沉降原因造成建筑物主体结构的破坏或产生影响结构使用功能的裂缝,造成巨大的经济损失。
沉降观测即根据建筑物设置的观测点与固定(永久性水准点)的测点进行观测,测其沉降程度用数据表达,凡一层以上建筑、构筑物设计要求设置观测点,人工、土地基(砂基础)等,均应设置沉陷观测,施工中应按期或按层进度进行观测和记录直至竣工。
1沉降观测的背景工程建筑物的沉降观测,在我国还是一门比较簇新的科学,它是随着我国建设事业的发展而一点一滴的不断地发展壮大的。
随着建设的日新月异.由于外界种种偶然因素的影响,在这些工程建筑及其设备的使用过程中,建筑物都会在垂直的方向上产生一定的变形,这种变形是有一定规律可追寻的。
这种变形在一定范围之内时,被认定为是正常现象,是可以忽略不计的,但是一旦超出了这个规定的范围,它就会直接影响建筑物的正常使用,严重时还会危及建筑物的安全。
静力水准法沉降观测技术的今昔
静力水准法沉降观测技术的今昔倪辰禹梁建宁摘要:“连通管”是一个古老的物理原理,在土木工程中用它可以构成进行沉降观测独特的“静力水准法”。
本文介绍了“静力水准法”的原理、应用和现代技术条件下的发展。
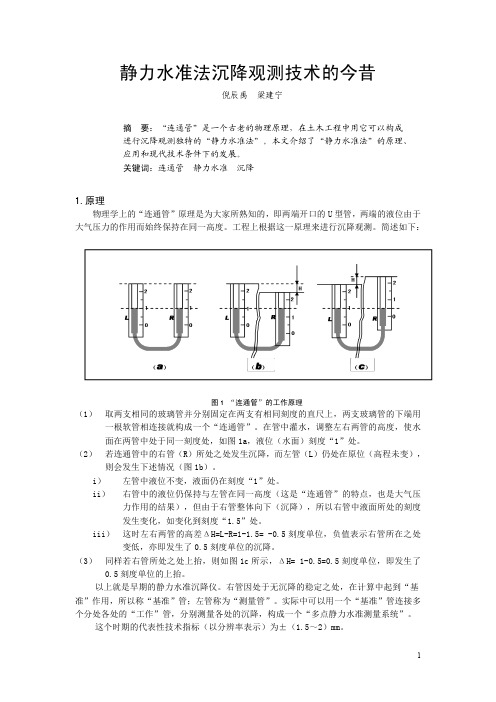
关键词:连通管静力水准沉降1.原理物理学上的“连通管”原理是为大家所熟知的,即两端开口的U 型管,两端的液位由于大气压力的作用而始终保持在同一高度。
工程上根据这一原理来进行沉降观测。
简述如下:(1)取两支相同的玻璃管并分别固定在两支有相同刻度的直尺上,两支玻璃管的下端用一根软管相连接就构成一个“连通管”。
在管中灌水,调整左右两管的高度,使水面在两管中处于同一刻度处,如图1a,液位(水面)刻度“1”处。
(2)若连通管中的右管(R)所处之处发生沉降,而左管(L)仍处在原位(高程未变),则会发生下述情况(图1b)。
i)左管中液位不变,液面仍在刻度“1”处。
ii)右管中的液位仍保持与左管在同一高度(这是“连通管”的特点,也是大气压力作用的结果),但由于右管整体向下(沉降),所以右管中液面所处的刻度发生变化,如变化到刻度“1.5”处。
iii)这时左右两管的高差ΔH=L-R=1-1.5=-0.5刻度单位,负值表示右管所在之处变低,亦即发生了0.5刻度单位的沉降。
(3)同样若右管所处之处上抬,则如图1c 所示,ΔH=1-0.5=0.5刻度单位,即发生了0.5刻度单位的上抬。
以上就是早期的静力水准沉降仪。
右管因处于无沉降的稳定之处,在计算中起到“基准”作用,所以称“基准”管;左管称为“测量管”。
实际中可以用一个“基准”管连接多个分处各处的“工作”管,分别测量各处的沉降,构成一个“多点静力水准测量系统”。
这个时期的代表性技术指标(以分辨率表示)为±(1.5~2)mm。
图1“连通管”的工作原理2.问题的发生早期的静力水准沉降仪出现后,由于它的原理简单明了,没有人会怀疑它的可靠性,因此在工程实践中得到较广泛的使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
静力水准法沉降观测技术的今昔倪辰禹梁建宁摘要:“连通管”是一个古老的物理原理,在土木工程中用它可以构成进行沉降观测独特的“静力水准法”。
本文介绍了“静力水准法”的原理、应用和现代技术条件下的发展。
关键词:连通管静力水准沉降1.原理物理学上的“连通管”原理是为大家所熟知的,即两端开口的U 型管,两端的液位由于大气压力的作用而始终保持在同一高度。
工程上根据这一原理来进行沉降观测。
简述如下:(1)取两支相同的玻璃管并分别固定在两支有相同刻度的直尺上,两支玻璃管的下端用一根软管相连接就构成一个“连通管”。
在管中灌水,调整左右两管的高度,使水面在两管中处于同一刻度处,如图1a,液位(水面)刻度“1”处。
(2)若连通管中的右管(R)所处之处发生沉降,而左管(L)仍处在原位(高程未变),则会发生下述情况(图1b)。
i)左管中液位不变,液面仍在刻度“1”处。
ii)右管中的液位仍保持与左管在同一高度(这是“连通管”的特点,也是大气压力作用的结果),但由于右管整体向下(沉降),所以右管中液面所处的刻度发生变化,如变化到刻度“1.5”处。
iii)这时左右两管的高差ΔH=L-R=1-1.5=-0.5刻度单位,负值表示右管所在之处变低,亦即发生了0.5刻度单位的沉降。
(3)同样若右管所处之处上抬,则如图1c 所示,ΔH=1-0.5=0.5刻度单位,即发生了0.5刻度单位的上抬。
以上就是早期的静力水准沉降仪。
右管因处于无沉降的稳定之处,在计算中起到“基准”作用,所以称“基准”管;左管称为“测量管”。
实际中可以用一个“基准”管连接多个分处各处的“工作”管,分别测量各处的沉降,构成一个“多点静力水准测量系统”。
这个时期的代表性技术指标(以分辨率表示)为±(1.5~2)mm。
图1“连通管”的工作原理2.问题的发生早期的静力水准沉降仪出现后,由于它的原理简单明了,没有人会怀疑它的可靠性,因此在工程实践中得到较广泛的使用。
但在使用中,又暴露出若干问题。
(1)当时读数是目视的,由于水面的张力,玻璃管中液面是凹型的,在读数时有1~2mm 的误差在所难免。
(2)人工方法读数,方法较原始,读数工作量大,而且无法实现自动化监测。
(3)设备虽然简单,但过于“原始”,不能适应规范使用的要求。
在这些问题的困扰下,静力水准沉降仪在工程中的使用范围一度缩小,如何使这种简单可靠的测量方法得以发展,成为一个重要问题,摆在了工程界的面前。
3.现代静力水准仪静力水准仪从早期型式到目前型式的发展大致经历了两个阶段。
3.1产品化阶段早期的“将玻璃管固定在直尺上”的构造形式过于简陋和原始。
于是从规范化使用的要求出发,出现了工厂生产的产品,也就有了“静力水准仪”这种专门的仪器。
它有四个最主要的特点:(1)用整体的“罐”代替“玻璃管加直尺”的构造形式,使测量的单元(相当于图1中的右管)成为一个功能独立的整体,便于运输和安装。
(2)在测量单元中引入“浮体”的构造部件,克服了液面凹形影响读数的弊端,此举还为使用电测传感器测量液位创造了条件,可谓通向自动化测量的关键一步。
(3)用整体的“基准罐”取代基准管(图1中的左管),使基准部分同样成为一个功能独立的、便于安装和运输的整体。
并在基准罐中引入“恒液位补充”的功能,使沉降变化较大时连通管中标准液面会有变化的细节问题也得到解决。
(4)增加了连接基准罐和所有测量罐的空气管,真正实现连通管两端应处于同一大气压力的环境下的要求。
产品化阶段的成果,已成为现代静力水准仪的雏形。
图2是这个阶段水平的最好写照。
图2静力水准多点沉降仪3.2现代化阶段上述产品阶段的成果,再加上现代的电测传感器和微型电子计算机技术,使得静力水准仪的发展达到一个崭新的阶段:以自动化遥测的功能在工程中进行沉降监测。
3.2.1(电测)位移传感器的使用(1)产品化的阶段在测量罐增设了“浮体”以方便读数。
工程界继而发现,“浮体”与测量罐顶部的距离变化量恰恰就是待测的沉降量,因而就萌发了在浮体和罐顶间安装一个位移传感器,将其间距离的变化(沉降量)转换成相应的电量,用仪器来读数,以彻底解决靠人工用视力在刻度上读数的落后局面,提高工作效率。
(2)初期所用的是电位器式的位移传感器。
它的主体固定在罐顶上,滑动杆与浮体相联。
浮体随液面上下活动时,就等量地带动滑动杆活动,传感器就有相应的信号输出。
但这类传感器的滑动杆和传感器内部的敏感体是有接触的,需要一定的力才能推动滑动杆,这个力是浮体产生的浮力。
为产生足够的推动力,浮体要做得足够大,整个罐体的直径就要与之相应,显得很“笨重”。
(3)随着电子技术的发展,出现了基于电/磁感应技术的非接触式位移传感器,这类传感器工作时不用产生接触,只要其滑动部分相应于固定的测量部分的位置在变动,测量部分就可感知滑动部分的位置变化,产生相应的电信号,完成位移测量。
这样,测量罐中的浮体就可以做得很小巧,甚至可以把浮体和传感器的滑动部分做成一体,简化了构造,进一步提高了仪器的水平。
(4)由于电信号的传送是用电线(电缆)来完成的,因此可以将若干个静力水准仪的测量罐输出的电信号分别用电缆送到一个最方便的地方集中,在这个地方用一台带选点开关的测量仪表依次读取各测量罐的读数,实现了遥测。
这在工作效率上是一个飞跃。
目前采用非接触式位移传感器的静力水准仪已成主流,接触式的将逐渐淘汰。
使用非接触式位移传感器的静力水准仪,代表性的技术指标为:量程100mm (或±50mm),分辨率0.1mm,准确度0.3~0.5mm。
3.2.2实用静力水准仪介绍(1)测量罐:图3、图4、图5、图6是几种现代实用的静力水准仪(测量罐)。
其中,图3是一种典型的型号,透过其透明的罐壁,可以看到浅蓝色的工作液体,白色的浮体。
透明罐上部的白色筒内是位移传感器及其变换电路,罐外的液管、电缆都清晰可见。
图4是另一款静力水准仪,它的构造和图2类似,但它带有一个可以进行上下位置和角度调整的安装架,特别适用于圆形隧道内安装测量的场合。
图4静力水准仪的测量罐(二)图3静力水准仪的测量罐(一)图3静力水准仪的测量罐(一)图5是全不锈钢外壳的,它的水罐和测量部分是互相密封不透水的,因此可以按工作环境决定是“正”装还是“倒”装(在圆形隧道内尤其需要),图中就是处在“倒”装的状况。
这款水准仪内部的浮体和传感器的活动部分是合为一体的,内部结构紧凑。
图6是另一款国外名厂制的静力水准仪。
(2)基准罐构成一个完整的静力水准仪,还需有一个能提供恒液位的“基准罐”。
基准罐恒定液位的方法在图2中可见,其中最左侧的液位自动控制器即“基准罐”。
其内部(右侧)较细的是供液管,由存液罐内电泵送来的工作液源源不断进入基准罐中。
但罐中还有一支开口位置比供液管高的恒液位控制管(内左),它起溢流作用,两管相互配合,使罐中的液位始终恒定在恒液位控制管的管口高度上。
图7、图8、图9是三种有代表性的实用基准罐。
图7是与图3成套配置的。
它的下部是一个直径较粗的储液罐,存较多的工作液,上部就是“基准罐”,较细的供液管,较粗较高的恒液位管和罐内的液位都清晰可见。
图8是与基准罐分离的形式,可适应紧凑的安装场合。
图5静力水准仪的测量罐(三)图6静力水准仪的测量罐(四)图7静力水准仪的基准罐和储液罐(一)图8静力水准仪的基准罐和储液罐(二)图6静力水准仪的测量罐(四)图9所示的是另一种基准罐。
该罐下部较粗大,可以容纳足够多的工作液,但其内部没有恒液位管和供液管,而是在上部安装了一个液位传感器(内有浮体)。
此罐向所有测量罐提供和补充工作液,同时也进行自身的液位测量,若此罐内的液位发生变化,其自身的液位传感器就会测出一个变化量,这个变化量在数据计算时加入测量罐的读数中作修正量用,其结果仍起到“恒液位”的作用。
(图9所示该罐已安装好,尚未加灌工作液和接管、接电缆)。
基准罐之所以起到基准作用,除了其内部有一套装置能提供一个恒定的液位外,其安装位置的高度还必须是被确认为是恒定的,不会发生隆沉现象。
退一步讲,即使不能确定该位置不会发生隆沉,也要用另一种可靠手段来校准(或验证)其位置的稳定程度,并根据校准结果在处理数据时加入修正值。
实际使用中,应该根据具体要求和现场条件,灵活组合各种形式的测量罐和基准罐,最大限度的地满足沉降监测的要求。
3.2.3工作液静力水准仪最常用的工作液是纯净的水。
为便于观察液位,可在水中加入适当的染色剂,一般用浅蓝色或浅绿色。
为防冻,可加入防冻液(如:乙二醇),此外,还可加入降低水的表面张力、防腐、防微生物孳生的各种成份。
但为各种目的加入的辅助成分,都应最后使工作液达到不含沉淀物(和会产生沉淀物)、不含固体悬浮物,也不得腐蚀其能接触到的水准仪中相应部件的要求。
在加灌入静力水准仪之前,还要用一定的方法除去溶解在水中的空气。
由于水在不同温度下,其体积略有改变。
所以若监测所处的环境温度变化幅度较大,或者监测的精确度要求较高,都要在计算时对工作液(水)的体积随温度的变化进行修正。
3.3微机控制下的静力水准沉降监测数据自动采集处理系统微机的出现,彻底改变了人工或半人工测量的工作模式。
借助于“数据自动采集器”,可以代替人工的遥测,实现自动遥测。
但真正意义上的自动测量,应是计算机控制下的自动遥测。
借助于专门编制的“数据采集和处理系统”的软件,计算机可以控制自动遥测的工作程序进行数据的预处理,在计算机内建立数据库,实时自动显示监测结果,提供包括自动报警,应答监测工程师对历史数据的查询等功能。
通过网络系统,更可以在异地经授权的计算机上实现同工地监测计算机上相同的数据实时显示、报警、查询的功能,为工程提供高质量.图10DT515型数据自动采集器(左)和数据自动采集器的现场安装(右)图9静力水准仪的基准罐(三)的监测服务。
图10是一例常用的数据自动采集器(左)和它在工程中安装(右)的实例。
图11是一个完整的,具有现代水平的静力水准自动监测系统构造原理框图。
具有图11中显示的功能的监测系统在很多监测工程师的工作中已成为现实,其工作可以如下描述:1各个固定在监测点上的静力水准传感器(“测量罐”)根据监测点的沉降产生相应的电压信号,各测量罐输出的电压信号都接到一台DT515型数据自动采集器上;如果基准罐不设自动恒液位装置,而用“浮体-液位传感器”的情况时,该“液位传感器”的测量输出信号也接到此数据自动采集器。
②③③⑥2在数据采集器上设定采集的时间间隔(可调整的范围为十秒到几小时,一般可取半小时)后,采集器就按设定的时间间隔对所有接入的传感器进行一次采样读数,并暂存在采集器的内存区里。
3用电缆传输或无线传输的方法连接设置在监测现场的采集器和设置在现场办公室的监测计算机,每次采样读数所得的数据就从采集器输送到计算机中,在计算机内按预先设定的“结构沉降自动监测系统(程序)软件”将测量所得的电信号换算成沉降值,并得到监测范围内的实时沉降曲线;处理完的数据存入监测计算机的数据库内。