汽车倒车防撞报警器
基于单片机的倒车防撞预警系统毕业设计

基于单片机的倒车防撞预警系统毕业设计倒车防撞预警系统是一种能够帮助驾驶员在倒车过程中避免碰撞的设备。
本文基于单片机设计了一种倒车防撞预警系统,并进行了详细的介绍。
该系统主要由倒车传感器、控制电路、显示屏和蜂鸣器组成。
其中,倒车传感器用于检测车辆周围的障碍物,通过将传感器输出的数据传给控制电路进行处理。
控制电路根据接收到的传感器数据,计算出障碍物与车辆的距离,并控制显示屏和蜂鸣器发出相应的警报。
在设计中,我们选择了超声波传感器作为倒车传感器,因为它能够准确地测量障碍物与车辆的距离。
我们将超声波传感器固定在车辆的后部,并将其与单片机相连。
当车辆开始倒车时,超声波传感器开始工作,并将检测到的障碍物距离传给单片机。
单片机接收到传感器数据后,根据一定的算法计算出车辆与障碍物的距离,并根据距离的大小决定是否发出警报。
为了方便驾驶员了解障碍物的距离,我们在车辆驾驶室内安装了一个显示屏,用于显示障碍物与车辆的距离。
当障碍物与车辆的距离小于一定值时,系统还会通过蜂鸣器发出警报,提醒驾驶员注意。
在系统的设计过程中,我们考虑到了多种因素。
首先,我们要确保传感器的数据准确性,要选择合适的传感器并进行校准。
其次,我们要考虑到驾驶员对系统的操作是否方便,要保证显示屏和蜂鸣器能够清晰地传达信息。
最后,我们还要考虑系统的可靠性和稳定性,要进行充分的测试和优化。
倒车防撞预警系统可以提高驾驶安全性,避免驾驶员在倒车过程中因为盲区而发生碰撞。
我们通过基于单片机的设计,实现了一个简单有效的倒车防撞预警系统。
通过这个设计,我们还深入了解了单片机的应用和原理。
希望这个设计能够对相关领域的研究和开发工作提供一些参考和启示。
汽车倒车防碰装置的示意图,请根据学过的知识

汽车倒车防碰装置的示意图,请根据学过
的知识
汽车倒车防碰装置工作原理是在普通倒车雷达的基础上,增加了一个有刹车功能的伺服器,当汽车由警戒区进入到危险区时控制器能向刹车伺服器发出控制号,刹车伺服器立即启动自动控制汽车停止后退,达到安全倒车的目的。
雷达工作时,定时器触发调制器,调制器产生调制脉冲,使振荡器产生大功率脉冲号经天线向空间辐射电磁波。
在天线控制系统的作用下,天线波束按规定方式在空间扫描。
若电磁波遇到目标,则目标反射回来的回波号经天线接入接收机,在通过号处理后,最后送到终端设备,得到目标的坐标工作原理。
倒车自动防撞系统是智能轿车的一部分,是防止汽车倒车时发生碰撞的一种智能装置。
它能够自动发现可能与汽车发生碰撞的车辆、行人或其他障碍物体,发出警报或同时采取制动或规避等措施,以避免碰撞的发生。
汽车倒车防碰装置系统的特点是:
(1)能够自动测出前方障碍物的速度和距离;
(2)执行机构能够自动启动刹车装置,自动关闭车的侧窗、天窗,自动调整座椅位置。
当乘客遭受撞击时,最大限度受到气囊的保护;
(3)能够感知车的行驶状态,如果传感器感到车在左右摇摆,或者感到车内的酒精浓度过高,它能够自动刹车或者自动锁死方向盘。
汽车倒车防碰装置原理
汽车倒车防碰装置原理
汽车倒车防碰装置是一种辅助驾驶系统,能够通过传感器、摄像头等装置,实时检测车辆周围的情况,并给出相应的警示信息,以避免车辆发生碰撞事故。
其原理主要有以下几点:
1、传感器原理
汽车倒车防碰装置通常采用超声波传感器或雷达传感器进行测距,通过探头发出声波或电磁波,然后接收回波,并根据回波时间计算出距离,从而判断车辆周围的障碍物是否过近。
2、摄像头原理
汽车倒车防碰装置还可以配备摄像头,通过图像处理技术来识别车辆周围的障碍物,并进行距离测量。
摄像头通常安装在车辆后部,通过车载显示屏显示反向画面,让驾驶员更加清晰地了解车辆周围的情况。
3、警示原理
当检测到车辆周围的障碍物过近时,汽车倒车防碰装置会通过声音、图像等方式发出警示,提醒驾驶员注意。
有些装置还可以自动刹车,以避免碰撞事故的发生。
总之,汽车倒车防碰装置是一种非常实用的安全辅助装置,能够有效避免车辆发生碰撞事故,为驾驶员带来更加便捷和安全的驾驶体验。
- 1 -。
汽车倒车防撞报警器的设计--本科毕业设计(论文)

通过详细列举汽车倒车防撞报警器的若干代演变历程,分析了报警器的研究背景及意义,比较提出了报警器存在的各类问题,同时分析了在超声波测距基础上研发的该类产品的原理和方法。
详细介绍了在AT89C51单片机基础上同时结合超声波脉冲测距的设计出的一款汽车倒车防撞报警器。
通过测量超声波在空气中传播的时间和速度计算得到所测量距离。
详细介绍了超声波测距的基本要求及各类物件的特性,概括性的分析了硬软件模块部分的设计原理与方法,具有很高的可用性。
关键词:超声波;AT89C51;防撞;测距The design details a collision alarm car reversing several generations of evolution, to analyze the background and significance of alarm, comparing various issues raised alarms exist, and analyzes the development of ultrasonic distance measurement based on the principles and methods of the class of products. The design described in detail based on AT89C51 microcontroller combined with the design of ultrasonic pulses ranging reversing out of a car crash alarm. The design of the distance calculated by the measured time and the propagation velocity of ultrasonic measurement in air. Papers detailing the characteristics of the basic requirements of ultrasonic ranging and various objects, broad analysis of the hardware and software design principles and methods section of the module, with high availability.Keywords: ultrasonic; AT89C51; anti-collision; ranging1 绪论 (1)1.1 课题研究背景及意义 (1)1.2 国内外发展状况 (1)1.3 存在的问题 (2)2 超声波测距原理 (3)2.1 测距方法的主要类型 (3)2.2 选题使用的测距方法 (4)2.3 超声波测距原理及实现 (4)3 单片机的选择 (4)3.1 AT89C51的简介 (4)3.2 AT89C51的主要性能参数 (5)4 系统工作原理 (5)4.1 硬件部分设计 (6)4.1.1 超声波发送模块 (6)4.1.2 超声波接收模块 (6)4.2 语音电路 (7)4.3 软件部分设计 (8)4.4 调试与优化 (10)5结论 (10)参考文献 (11)致谢 (12)1.1 课题研究背景及意义社会在进步,经济在发展,汽车已经成为人们出行必不可少的工具,交通拥堵情况日趋严重,不同级别的车辆事故也越来越频繁,给人们的人身安全和经济状况造成了或多或少的威胁,在这种情况下,设计一种响应速度快,可靠性高,经济实用的汽车防撞预警系统显得尤为重要。
倒车雷达

倒车雷达全称叫“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车或者倒车时的安全辅助装置,由超声波传感器(俗称探头)、控制器和显示器(或蜂鸣器)等部分组成。
能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达又称泊车辅助系统,或称倒车电脑警示系统。
英文名称:Parking Distance Control英文简称:PDC国内品牌:雷兽、铁将军、亿车安、四创、蓝霹雳、安极星、豪迪、探路神、路标、固地、宝仕达、Linfor、二朗神、世博、德首、国邦、黑鹰、奇真等。
探测原理倒车雷达是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
探头装在后保险杠上,根据不同价格和品牌,探头有二、三、四、六、八只不等,分别管前后左右。
探头以45度角辐射,上下左右搜寻目标。
它最大的好处是能探索到那些低于保险杠而司机从后窗难以看见的障碍物,并报警,如花坛、蹲在车后玩耍的小孩等。
倒车雷达的显示器装在后视镜上,它不停地提醒司机车距后面物体还有多少距离,到危险距离时,蜂鸣器就开始鸣叫,让司机停车。
挡位杆挂入倒挡时,倒车雷达自动开始工作,测距范围达0.3到2.0米左右,故在停车时,对司机很实用。
倒车雷达就相当于超声波探头,从整体上来说超声波探头可以分为两大类:一是用电气方式产生超声波,其二是用机械方式产生超声波,鉴于目前较为常用的是压电式超声波发生器,它有两个电晶片和一个共振板,当两极外加脉冲信号,它的频率等于压电晶片的固有震荡频率时,压力晶片将会发生共振,并带动共振板振动,将机械的能转为电信号的这一过程,这就成了超声波探头的工作原理。
为了更好地研究超声波和利用起来,人们已经设计和制造出很多超声波发声器,超声波探头加以运用在使用汽车倒车雷达上。
这种原理用在一种非接触检测技术上,用于测距来说其计算简单,方便迅速,易于做到实时控制,距离准确度达到工业实用的要求。
基于超声波测距的汽车倒车防撞报警系统设计
基于超声波测距的汽车倒车防撞报警系统设计一、本文概述本文针对汽车安全驾驶领域的重要需求,详细探讨并设计了一种基于超声波测距技术的汽车倒车防撞报警系统。
随着城市交通环境复杂性的增加以及人们对行车安全意识的提高,如何有效防止因驾驶员视线盲区和操作失误引起的倒车碰撞事故成为研究热点。
本系统利用超声波传感器作为主要探测元件,通过发射和接收超声波信号来精确测量车辆与后方障碍物之间的实时距离,并结合智能算法分析处理这些数据,以便在车辆靠近障碍物到危险距离时及时发出报警提示,辅助驾驶员做出正确决策,从而显著提升倒车安全性。
文章首先阐述了该系统的背景意义和技术原理,随后深入剖析超声波测距方法及其在汽车应用中的优势和挑战接着,详细介绍了系统架构设计,包括硬件组成(如超声波传感器模块、信号处理电路、报警装置等)及软件算法实现通过实验验证了系统的性能指标,探讨其在不同工况下的稳定性和准确性,并对未来可能的优化方向进行了展望。
通过本文的研究,期望能为汽车主动安全技术的发展贡献一份力量,推动相关产品的实际应用与普及。
二、超声波测距原理及技术超声波测距技术是利用超声波在空气中的传播特性来实现距离测量的方法。
超声波是一种频率高于人耳能听到的上限(约20kHz)的声波,它在空气中的传播速度相对恒定,约为343米秒。
这一特性使得超声波非常适合用于精确的距离测量。
超声波测距的基本原理是发射器发射出一定频率的超声波,当这些波遇到障碍物时会发生反射,反射波被接收器接收。
通过测量超声波发射和接收之间的时间差,可以计算出超声波传播的距离。
由于超声波的传播速度是已知的,因此可以通过以下公式计算距离:这里的“时间差 2”是因为超声波需要从发射器传播到障碍物,再从障碍物反射回接收器,所以总时间是往返时间。
在汽车倒车防撞报警系统中,超声波传感器通常被安装在汽车的尾部。
当驾驶员开始倒车时,系统会自动激活传感器,传感器开始发射超声波。
超声波遇到车辆后方的障碍物时反射回来,被传感器接收。
基于超声波测距的汽车倒车防撞报警系统设计
基于超声波测距的汽车倒车防撞报警系统设计汽车倒车防撞报警系统是一种基于超声波测距技术的安全辅助设备,能够帮助驾驶员在倒车时避免与障碍物发生碰撞,提高行车安全性。
本文将对该系统的设计进行详细介绍。
首先,该系统主要由超声波传感器、控制器和报警器组成。
超声波传感器负责探测车辆周围的障碍物距离,传输给控制器进行处理。
控制器根据传感器的数据判断是否存在碰撞的风险,并通过报警器向驾驶员发出警告信号,提醒其采取正确的行动。
在系统的设计过程中,首先需要选择合适的超声波传感器。
传感器的选择应考虑其测距范围、精度和对环境的适应性等方面。
一般来说,超声波传感器在测距范围内可以提供较高的测量精度,并且对大多数障碍物均有良好的适应性。
接下来,控制器的设计是系统中的关键部分。
控制器需要实时接收传感器上传的距离数据,并进行数据处理和决策。
控制器可以使用嵌入式系统来实现。
在数据处理方面,可以使用一些常见的算法,如滤波算法、虚拟线算法等,来进行数据处理和障碍物的识别。
在决策方面,可以设置适当的距离阈值,当距离低于该阈值时触发警报。
最后,报警器的设计需要考虑其音量和可靠性。
对于音量,报警器应具备足够的声音大小,以确保驾驶员能够听到警报并及时做出反应。
对于可靠性,报警器应具备较长的寿命和稳定的性能,以确保系统能够长时间稳定运行。
此外,为了提高系统的可用性,还可以考虑加入其它功能,如图像显示功能。
通过搭载摄像头和显示器,可以将车辆周围的情况实时显示在显示器上,使驾驶员更加直观地了解障碍物的位置和距离。
总之,基于超声波测距的汽车倒车防撞报警系统是一种重要的安全辅助设备。
通过合理选择超声波传感器、设计有效的控制器和报警器,并加入其它功能,可以实现对倒车过程的有效监控和警示,提高驾驶员的行车安全性。
红外线反射式倒车防撞报警器_2009.10

红外线反射式倒车防撞报警器红外线倒车防撞电路安装在车辆尾部保险杠上,当车辆倒车遇到障碍物时,防撞报警器发出声光警示信号,可防止倒车时发生碰撞事故。
红外线反射式倒车防撞报警器电路组成如图6-50 所示。
电路工作原理分析红外线反射式倒车防撞报警器电路由红外信号发射器,红外信号接收及信号处理电路和声光警示电路组成。
锁相环音频译码器LM567 与红外发射管LED1 、LED2 组成红外信号发射电路。
在同一电路内由光敏三极管PH2025 组成红外反射信号接收器。
LM567 为红外发射信号的调制器兼接收信号的接收与解调器,经接收解调后的信号由⑧脚输出,其输出控制信号的形式为低电平。
时基集成电路NE555 与R6 、R7 及C7 组成一个多谐振荡器,发光二极管LED3 、蜂鸣器及VT3 、指示灯等元器件组成了声光警示电路。
车辆倒车时,本电路的电源被接通,LM567⑤脚输出的频率为20kHz 的脉冲信号,经VT1 放大后驱动LED1 ,LED2 发出经调制的红外信号,当红外接收管VT2 没有接收到红外信号时,LM567的⑧脚输出高电平,使得NE555 的复位端④脚也为高电平,由NE555等元器件组成的多谐振荡器起振,发光二极管LED3 闪烁发光,蜂鸣器随着LED3 同步间断发声,小灯泡在VT3 的驱动下也同步闪光。
当车辆的尾部距离障碍物过近时(小于1m) ,LED1 、LED2 发出的红外信号经障碍物的反射被红外接收管接收到并转换成电信号,20kHz 的电信号送入LM567 的信号输入端③脚,LM567 的⑧脚输出低电平,NE555 的复位端④脚受到低电平控制,振荡器停止工作,其③脚输出低电平,LED3 由闪烁发光变为常亮,蜂鸣器由间断发声变为常鸣,小灯泡熄灭,提醒司机立即停止倒车。
如果需要加大电路的检测距离,可以用一体化红外接收头代替电路中的红外接收管VT2 ,此时需要将LM567 的锁相环中心频率调整为38kHz 。
基于单片机的汽车倒车防撞报警器开题报告

基于单片机的汽车倒车防撞报警器开题报告开题报告内容与要求一、毕业设计(论文)内容及研究意义(价值)设计的内容是基于AT89C51单片机倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和AT89C51单片机结合于一体,设计出一种基于AT89C51单片机的倒车防撞报警系统。
该系统采用软、硬件结合的方法,具有模块化和多用化的特点。
此设计采用超声波测距原理,当汽车与障碍物的距离小于所设定的安全距离时,系统能发出声光报警,并随着距离的不断缩近,报警频率不断提高。
超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。
工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
随着我国经济的飞速发展,交通运输车辆的不断增多,由此产生的交通问题越来越成为人们关注的问题。
其中倒车事故由于发生的频率极高,已引起了社会和交通部门的高度重视。
倒车事故发生的原因是多方面的,倒车镜有死角,驾车者目测距离有误差,视线模糊等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来许多麻烦,例如撞上别人的车、消防水笼头,如果伤及儿童更是不堪设想,有鉴于此,汽车高科技产品家族中,专为汽车倒车泊位设置的“倒车雷达”应运而生,倒车雷达的加装可以解决驾驶人员的后顾之忧,大大降低倒车事故的发生。
汽车倒车雷达全称为“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车和起动车辆时因前后左右探视所引起的困扰,并帮助驾驶员克服视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的原理与普通雷达一样,是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
通过感应装置发出超声波,然后通过反射回来的超声波来判断前方是否有障碍物,以及障碍物的距离、大小、方向、形状等。
汽车倒车雷达探测器的工作原理
汽车倒车雷达探测器的工作原理汽车倒车雷达探测器是一种常见的汽车安全辅助设备,它可以有效地帮助驾驶员在倒车时避免发生碰撞事故。
本文将详细介绍汽车倒车雷达探测器的工作原理。
一、工作原理概述汽车倒车雷达探测器通过使用超声波来实现对周围环境的探测。
它通常由多个传感器、控制模块和报警装置组成。
当车辆倒车时,传感器会发射超声波信号,并接收回波。
通过分析回波信号的时间和强度,控制模块可以准确计算车辆与障碍物之间的距离,并及时向驾驶员发出警报。
二、传感器汽车倒车雷达探测器的传感器通常安装在车辆的后保险杠上。
它们使用超声波传感器来发射和接收声波。
波束从传感器发送出去并与周围物体相交。
当声波遇到障碍物时会发生反射,返回传感器并被接收。
传感器测量声波离开和返回之间的时间差,并将这个时间差转换成距离。
三、控制模块控制模块负责接收传感器发送的信号和计算车辆与障碍物之间的距离。
当传感器接收到回波信号后,它们会将信号发送给控制模块。
控制模块使用声波的时间差来计算距离,并将结果显示在车辆内部的相关显示屏上。
四、报警装置报警装置是汽车倒车雷达探测器的重要组成部分。
当控制模块检测到距离障碍物过近时,它会向报警装置发送指令,以触发声音或光线等警报。
这样可以提醒驾驶员注意周围情况,避免发生碰撞事故。
五、工作原理详解汽车倒车雷达探测器的工作原理是基于声波的传播速度和回波时间的计算。
声波在空气中传播的速度大约为343米/秒,当声波遇到障碍物时会发生反射,返回传感器。
通过测量声波离开和返回之间的时间差,可以计算出障碍物与车辆之间的距离。
汽车倒车雷达探测器通常使用多个传感器进行环形布置,以实现360度的全方位探测。
每个传感器依次发射声波,并接收返回的回波。
控制模块通过比较不同传感器之间的时间差,可以计算出障碍物与车辆之间的具体位置和距离。
当控制模块计算出距离后,它会将结果显示在与控制模块连接的显示屏上。
驾驶员可以根据显示屏上的信息来判断障碍物的距离,从而采取相应的措施。
设计倒车防撞告警装置的目的及意义
设计倒车防撞告警装置的目的及意义摘要随着社会经济的发展交通运输业日益兴旺,汽车的数量在大幅攀升,由此产生的交通问题也引起人们的重要关注。
主要针对拥挤的公路、街道、停车场等场所,加上存在视觉盲区,司机在倒车时无法看到车后的障碍物,容易刮伤汽车甚至发生交通事故等一些状况,汽车倒车雷达是一种旨在倒车防护的倒车防撞系统。
本设计从实验研究分析的角度,分析了汽车倒车防撞系统的基本设计原理以及目前国内外此类防撞系统存在的问题。
较详细的介绍一种超声波测距系统以及根据该系统设计,研制的汽车倒车防撞报警器,它能自动检测车尾障碍物的距离。
当达到极限位置的时候,它能发出声光报警,提醒司机刹车。
设计采用国内生产厂家的通用元件,成本低,性能可靠,有利于推广。
关键词: 超声波车辆报警装置单片机AbstractWith the development of society and economy of transportation industry is booming, the automobile quantity increasing significantly, the resulting traffic problem also causes people's importance. The main needle crowded highways, streets, parking area, together with the presence of the visual blind spot, drivers in reversing cannot see obstacles behind the vehicle, easy to scratch the automobile traffic accident, even some condition, car reversing radar is aimed at reversing protection reversing anti-collision system.Experimental study on the design from the perspective of analysis, analysis of the automobile back-draft anti-collision system basic design principle and anti-collision system at home and abroad such problems. A more detailed ultrasonic ranging system and according to the system design, development of the automobile back-draft anti-collision alarm, it can automatically detect the distance between the rear obstacles. When the time limit, it can give an alarm, to remind the driver brakes. Domestic manufacturers design universal components, low cost, reliable performance, is conducive to the promotion.Key words:Ultrasonic wave;vehicles;Alarm device;Single chip microcomputer目录摘要 ....................................................................................................................... I Abstract........................................................................................................................ I I 第1章绪论 . (1)1.1 设计倒车防撞告警装置的目的及意义 (1)1.2 倒车防撞告警装置的发展经历 (1)1.3 倒车防撞告警装置的主要研究内容 (2)第2章系统工作原理 (3)2.1 超声波概述 (3)2.2 超声波传感器概述 (3)2.3 超声波测距原理 (4)2.4 倒车防撞报警的原理 (5)第3章系统总体方案设计 (6)3.1 系统功能设计 (6)3.2 系统组成及工作过程 (6)第4章系统硬件电路设计 (7)4.1 单片机的选取 (7)4.2核心控制模块设计 (8)4.3 超声波发射模块设计 (9)4.4 超声波接收模块设计 (10)4.5 温度补偿模块设计 (11)4.6 人机交互模块设计 (11)4.7 电源模块 (13)4.8 声光报警模块设计 (14)第5章系统软件设计 (15)5.1 超声波发送接收子程序设计 (15)5.2液晶显示子程序设计 (16)5.3距离判断及报警子程序设计 (17)结论 (19)参考文献 (20)致谢 (22)附录1 系统总体电路 (23)附录2 系统工作主要程序 (24)第1章绪论1.1 设计倒车防撞告警装置的目的及意义目前,随着现代生活节奏的加快,经济的快速发展,高速公路已经在交通运输中占有重要地位,其正常运转与否事关重大,而且汽车的密集度日益增大,导致汽车追尾,倒车碰撞等交通事故发生的频率也在增加,同时据有关资料对公路交通事故的统计分析,发现在司机—汽车—道路三个环节中,司机是可靠性最差的一个环节,80%以上的事故是由于司机反映不及时或判断失误引起的,为提高汽车运行的安全性,特别在汽车高速行驶情况下,目标的正确识别至关重要,而天气或司机的疲劳驾驶等都将影响司机对前方目标识别,而且随着汽车持有量的不断增加,如何提高道路的流量,如何解决天气对高速公路的影响等等,已逐渐引起人们的注意。
汽车防碰倒车撞报警系统设计.

目录摘要 (1)目录 (1)绪论 (3)第一章汽车防撞报警系统设计简介 (4)1.1 设计概要 (4)1.1.1设计任务与要求 (4)1.1.2研究方法 (4)1.1.3解决的关键问题 (4)1.2 汽车防撞报警系统设计的意义 (5)第二章设计思路分析 (7)2.1 系统总体方案 (7)2.2 工作原理 (8)2.3 控制器AT89C2051的功能特点 (8)第三章系统硬件电路设计 (9)3.1 系统硬件方案设计 (9)3.2 遥控器控制框图 (10)3.3 工作原理剖析 (11)3.3.1传感器的选择 (11)3.3.2超声波的发射与接收电路 (11)3.3.3测速原理 (12)3.4 实物设计所能达到的功能及操作说明 (12)第四章系统软件电路设计 (14)4.1 主程序 (14)4.2 串口通信模块——transplant.C (15)4.3 程序编写 (16)第五章调试与测试 (18)总结 (19)参考文献 (20)附录1 (20)附录2 (22)致谢 (25)绪论随着时代的发展及社会的进步,越来越多的汽车进入了普通人的家庭。
汽车逐渐成为人们生活中不可缺少的一部分。
尽管公路条件在不断地改进,但仍然避免不了公路上汽车拥挤的现状,再加上设计车速不断提高,恶性交通事故无时无刻不在发生,给人们和社会带来了巨大的生命与财产损失。
汽车防撞报警系统也因此应用而生。
汽车防撞报警系统是一种当汽车离障碍物较近时向司机预先发出报警信号的装置,通常系统的各个探测器安装于汽车的几个关键的车身部位,能探测到接近车身的行人、车辆和周围的障碍物,能向司机或乘客提前发出即将发生撞车危险的信号,促使司机甚至撇开司机采取应急措施处理特殊险情,避免损失。
同时当汽车发生故障时,可以通过按动警示信号键向过往的车辆发送无线警示信号,提醒过往车辆的司机注意,从而更有效地避免交通事故的发生。
汽车的各种方便性正不断地被人们所接受,现如今如同是一般的家用电器一样地进入平常百姓的家中,开发本系统,可以广泛地安装于各种家用轿车、客车、货车等,如与车载微型电脑相配合,可以实现更多的人工智能化操作,是实现汽车无人驾驶必不可少的一个组成部分,也是未来汽车的发展方向,因此运用前景是相当可观。
倒车报警器的作用
倒车报警器是用于车辆倒车时所产生的信号装置,警示车后行人及其他车辆快速离开的作用。
倒车报警器的工作原理:
利用倒车灯的电路,在驾驶员挂上倒挡时,接通报警继电器,使一个小型电喇叭发出间歇性的声响。
倒车报警器,它能自动检测车尾障碍物的距离。
当达到极限位置的时候,它能发出声光报警,提醒司机刹车。
超声波距离传感器采用压电元件锆钛化铅,一般称为RZT,这种传感器的特点在于具有方向性,汽车所用的倒车声纳系统利用超声波距离传感器的“回声”现象制成的,倒车时向车辆后方发射超声波,测定超声波遇到障碍物后返回的时间,就可以得到车到障碍物的距离。
倒车报警器一般用于大型卡车上,通常我们能听见在卡车倒车时会发出“倒车、倒车、请注意”的提示音,有效防止倒车事故发生。
基于SPCE061A的汽车倒车防撞报警器设计与研究
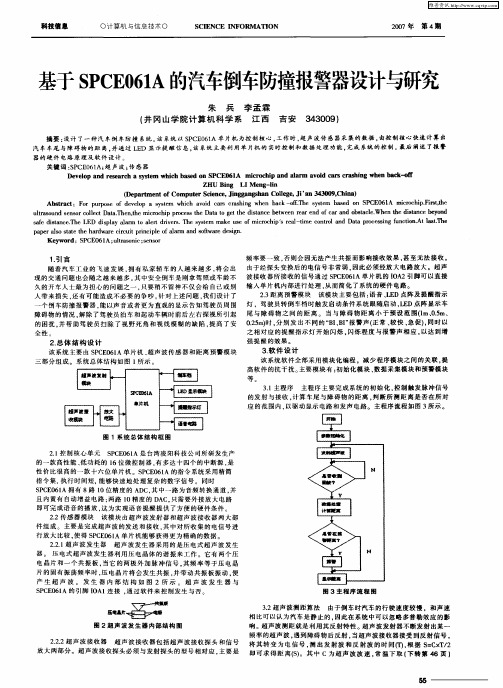
频 率要 一 致 , 则 会 因无 法 产 生 共 振 而影 响接 收 效 果 , 至 无 法 接 收 。 否 甚 1引 言 . 因 随 着 汽 车 工 业 的 飞 速 发 展 , 有 私 家 轿 车 的 人 越 来 越 多 , 会 出 由 于 经探 头变 换 后 的电 信 号 非 常 弱 。 此 必须 经 放 大 电 路 放 大 。超 声 拥 将 P E 6 A单 片 机 的 I A O 2引脚 可 以直 接 现 的 交 通 问 题 也 会 随之 越来 越 多 。 中 安 全倒 车 是 刚拿 驾 照或 车 龄 不 波 接 收 器 所接 收 的信 号 通 过 S C 0 1 其 输 入 单 片 机 内 部 进行 处 理 , 而 简 化 了 系 统 的 硬 件 电路 。 从 久 的 开 车 人 士 最 为 担 心 的 问 题之 一 , 只要 稍 不 留神 不 仅 会 给 自 己或 别
23距 离 预警 模 块 该 模 块 主要 包 括 : 音 、E 点 阵及 提 醒 指 示 l 语 LD E L 个 倒 车 防 撞 报 警 器 , 以 声 音 或 者更 为 直观 的显 示 告 知 驾 驶 员 周 围 灯 ,驾 驶 员 转 倒 车 档 时 触发 启 动条 件 系 统 跟 随 启 动 , D 点 阵 显示 车 能 尾 与 障 碍 物 之 间 的距 离 。 当 与 障 碍 物 距 离 小 于 预 设 范 围 (m、. 1 05 m、 障 碍 物 的 情 况 。 除 了 驾 驶 员泊 车 和起 动 车辆 时 前 后 左 右 探 视 所 引 起 解
维普资讯
科技信息
0计算机 与信息技术0
S I NC I ORMAT ON C E E NF I
20 0 7年
第 4期
基于 S C 01 P E 6A的汽车倒车防撞报警器设计与研究
汽车倒车雷达的原理
汽车倒车雷达的原理
汽车倒车雷达是一种常见的汽车安全设备,它采用超声波传感器来帮助驾驶员在倒车时识别和避免碰撞。
其工作原理如下:
1. 超声波发射器:汽车倒车雷达系统中包含一个或多个超声波发射器,它们负责发射超声波信号。
2. 超声波传播:发射器将超声波信号以固定的频率发射出去,这些声波在空气中以声速传播。
3. 障碍物反射:当超声波信号遇到障碍物时,一部分声波会被障碍物反射回来。
4. 超声波接收器:汽车倒车雷达系统还包含一个或多个超声波接收器,它们负责接收被障碍物反射回来的声波。
5. 信号处理:接收器将接收到的声波信号转换为电信号,并通过信号处理器进行处理。
6. 距离计算:信号处理器根据接收到的声波信号和发射的声波信号之间的时间差计算出障碍物与车辆的距离。
7. 警报系统:根据距离计算的结果,汽车倒车雷达系统会根据设定的阈值来触发警报系统,向驾驶员发出警示,提醒其注意避免碰撞。
总的来说,汽车倒车雷达利用超声波的传播和反射特性,通过
发射和接收超声波信号来测量障碍物与车辆的距离,并通过信号处理和警报系统向驾驶员提供相关信息,从而帮助驾驶员安全地进行倒车操作。
汽车倒车防撞装置的设计

汽车倒车防撞装置的设计随着社会的发展和科技的进步,汽车已经成为现代人生活中不可或缺的交通工具,但同时也带来了许多交通安全隐患。
特别是倒车过程中的事故频发,给行人和车辆带来了严重的安全威胁。
为了解决这一问题,汽车倒车防撞装置应运而生。
本文将着重介绍汽车倒车防撞装置的设计原理和技术特点。
一、设计原理汽车倒车防撞装置的设计原理是利用传感器及控制系统感知车辆周围环境状况,发现障碍物后及时发出警报并自动控制车辆停车,避免碰撞发生。
目前常用的传感器有超声波传感器和摄像头传感器两种。
1. 超声波传感器原理超声波传感器是通过超声波的发射和接收来确定车辆周围的障碍物距离和方向。
当发射超声波遇到障碍物时,会有一部分超声波被障碍物反射回来,传感器通过计算反射回来的超声波的时间差来确定障碍物的距离并进行距离预警。
根据反射回来的超声波的强弱来判断障碍物的大小和形状,从而控制车辆的方向和速度,避免碰撞发生。
摄像头传感器则是通过摄像头采集车辆周围的图像,并通过图像识别技术来识别和分析障碍物的种类和位置,然后通过算法计算出避让路径,控制车辆的行驶方向和速度,从而避免碰撞发生。
摄像头传感器相比超声波传感器在障碍物识别和计算精度上更有优势,但对于环境光线和雨雾等因素的影响较大,需要配合其他技术来改善。
二、技术特点汽车倒车防撞装置在设计时需要考虑以下几个技术特点:1. 灵敏度:传感器应具有足够的灵敏度,能够及时准确地感知到车辆周围的障碍物。
应对不同尺寸、材质和形状的障碍物进行识别和判断,避免误报或漏报。
2. 稳定性:传感器在不同环境条件下应具有良好的稳定性,能够适应各种天气和路面情况,确保系统的可靠性和稳定性。
3. 实时性:传感器及控制系统的响应速度应快,能够在感知到障碍物后及时发出警报并采取相应的措施,确保安全驾驶。
4. 多元化:传感器应具备多元化的感知能力,能够感知不同角度和距离的障碍物,从而为驾驶员提供更全面的安全保障。
5. 舒适性:在警报和控制车辆行驶时,要考虑驾驶员的舒适感受,避免因过多的警报声和频繁的制动而引起驾驶员的不适感。
汽车倒车防撞报警系统设计课件
致谢
?Thank You !
目录
? 第一章 引 言 ? 第二章 课题的方案设计与论证 ? 第三章 系统的硬件结构设计 ? 第四章 系统软件的设计 ? 第五章 调试 ?总 结 ?致 谢 ? 参考文献 ? 附录
系统方案设计
? 超声测距系统的电路功能模块包括发射电路、接收电路、 显示电路、核心功能模块单片机控制器及一些辅助电路。
? 汽车倒车防撞报警系统软件设计的主要思路是主要由自动 测距系统、中央处理机、控制系统、距离显示和报警设置 及辅助单元等部分组成。
调试
? 单片机系统的硬件调试和软件调试是不能分开的,许多硬件错误是在软件调试 中被发现和纠正的。但通常是先排除明显的硬件故障以后,再和软件结合起来 调试以进一步排除故障。
汽车倒车防撞报警系统 设计
背景
? 随着汽车的迅速增加,停车难已经是个不争的事实,狭小 的停车场地常常令有车一族无所适从,稍不慎,则闯祸, 烦事又烦人。虽然每辆车都有后视镜,但不可避免地都存 在一个后视盲区。倒车雷达是汽车泊车或者倒车时的安全 辅助装置,能以声音或者更为直观的显示告知驾驶员周围 障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前 后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角 和视线模糊的缺陷,提高驾驶的安全性。倒车雷达的发明 是迫在眉睫的,是必不可少的设备。
超声波接收 器
超声波发射 器
放大电 路
放大电 路
检波电路
定时器
单片机 控制
报警系统
显示 器
硬件结构设计
? 倒车雷达系统主要有主机和探头两部分组成,主机电路包括发射电路、接收电 路、计数显示电路三部分。单片机采用STC89C52。采用12MHz高精度的晶振 ,以获得较计采用分块调试再整体调试的方法,硬件静态的调试包括排除逻辑故障 ,排除失效元器件,排除电源故障 ,最后是联机仿真调试。
倒车雷达老是报警是怎么回事
倒车雷达老是报警是怎么回事
很多人不知道汽车有必要安装倒车雷达吗。
倒车雷达,即“倒车防撞雷达”,也叫“泊车辅助装置”,主要由超声波传感器、控制器和显示器等部分组成。
我们不止要知道倒车雷达的作用还要了解倒车雷达出现一些小的故障的时候是什么原因引起的。
1、倒车雷达出现误判,一直响,首先就要想到,雷达周围是不是有什么东西。
有这么两种可能,首先爱车长期抛头露面,探头的生存环境可是一点都不好的,长时间不留意,浑身就充满了灰尘、脏东西之类的。
2、和爱车所在的天气有直接的关系,打个比方在北方的冬天,到处都是寒冷结冰的,而敏感的探头万一周身有水,就会很快的结成冰,这也就成为倒车雷达一直鸣响的第二种原因了。
3、是探头太紧的情况,探头会默认周围一直有异物存在,这样的话,倒车雷达就可能一直报警。
4、探头松了。
这种情况发生的概率稍微会大一些,因为车经常都是在运动之中,会遇到很多不同的路况,所以时间一长,探头就会松掉。
5、一般是出现在车尾有过比较严重的碰撞,而在碰撞中探头也遭到损伤,可是我们并未发现并更换。
6、探头进水也会导致倒车雷达误报,而进水主要是和探头的质量有直接的关系,当然也不排除探头有裂缝的可能性。
7、如果说之前的故障都进行了排除,倒车雷达还是误报,那就要考虑是不是倒车雷达的系统出现了一些问题,比如:倒车雷达控制盒不好、电磁干扰、电路不畅等等,由于这些问题都是比较专业的,所以说,如果大家有检查到这一步的建议大家讲车开到专修店进行处理。
以上就是对倒车雷达老师报警是怎么回事的介绍。
希望通过我们的介绍能让大家对倒车雷达的报警故障有一个更好的了解,以便我
们在遇到这样的情况的时候可以及时进行排查解决。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车倒车防撞报警器
一、任务与要求:
1)设计一套汽车倒车防撞报警系统,
◆ 要求有一台主机
◆ 汽车与物体距离小于设定值时,利用蜂鸣器进行报警
◆ 通过按键选择报警的距离
◆ 数码显示选择的档位
2)已知条件:。
3)主要技术指标:
1、输入电源:车用直流电源,DC12V
2、发射频率: 40kHz
3、接收频率: 40kHz(中心频率)
4、报警音量:≥。
分贝
5、探测距离:三档可调
二、实物设计所能达到的功能及操作说明:
硬件设计:
采用51系列单片机中的简易型产品AT89C2051作为中央处理器,选用专用配对的超声波组件,进行超声波信号与电信号的相互转换,利用
超声波传感器的选频特性,对接收到的超声波信号进行幅值判断,从而达到不同距离的选择与报警的目的。
操作说明:
1、接上电源,红色电源指示灯点亮,同时数码管显示"0",此时系统不发送超声波信号。
2、按动距离选择按键,蜂鸣器鸣叫,同时数码管显示0到3这几个数字,当显示1、2、3档时,设计与调试时设定的距离分别表示60厘米、50厘米、40厘米,只要有物体靠近探测器,就会发出"嘟、嘟、嘟"的报警声。
三、方案与论证:
1)汽车倒车防撞报警器的组成:
汽车倒车防撞报警器主要由超声波发生器、超声波发射电路、超声波接收电路、信号放大电路、直流控制电路、中央处理单元、数字显示电路、报警电路和距离选择电路等部分组成。
发射电路发送超声波信号,当的射的信号被物体挡住时,反射回来的信号经接收器接收,进行两级放大后,再经倍压整流,形成一个直流控制电压,当这个电压值大于设定值时,表示物体离汽车的距离已小于设定距离,比较器输出低电平信号,系统据此判断出达到报警距离,驱动蜂鸣器进行报警,其框图如下:
2)软件设计流程图:
四、设计与调试要点
对于本系统的设计,其难点在于40KHz信号的产生。
由于超声波传感器的中心工作频率为40KHz,当偏离这个频率时,其接收器的灵敏度将明显降低,具体可以从超声波传器的特性曲线中得知。
当发送40KHz 的频率时,接收到的信号最强,因此距离也就最大,而当偏离时,探测
距离也将缩短,这一点是本设计总的设计思路。
对于产生40KHz的驱动信号,方法有多种,可以选用电感、电容振荡元件来完成驱动信号的发生器,但是其频率稳定性较差,不容易调准,因此制作成功的可能性相对较小。
本设计中,选用了单片机作为信号的发生电路,由于采用了频率稳定性好的晶振作为系统的时钟,因此有极高的稳定性,由此产生的驱动信号也较为稳定,当编制不同的程序时,可以得到不同的频率输出。
电路中以接收到的信号强度值作为障碍物的判断依据,因此对起控点的选择也是本设计制作成功非常关键性的一部分。
由于反射回来的超声波信号的强弱与环境因素有关,因此在调试时必须非常细心,注意收集在改变距离时,实际的直流控制电压的大小,合理地选择好电压比较环节的起控点,从而达到距离小于设定值时的报警。
本设计的原理图中所标为我们实际调试好的参数,但由于电子元件都有一定的误差值,同时由于三极管的直流放大倍数也存在差异,因此实物制作中的调试非常重要
以下是我们手工制作并调试好的设计实物图和PCB板图:
此图为焊接面图。