「ROS与C 入门教程」搭建开发环境(QT ros_qtc_plugin)
工业机器人操作系统ROS的开发与调试技巧

工业机器人操作系统ROS的开发与调试技巧工业机器人操作系统(Robot Operating System,ROS)是一款开源的机器人软件平台,它为机器人开发者提供了一套强大的工具和库,用于开发、部署和运行机器人应用程序。
本文将介绍工业机器人操作系统ROS的开发与调试技巧,帮助读者更好地使用ROS进行机器人开发。
一、ROS开发环境的搭建要开始使用ROS进行开发,首先需要搭建ROS开发环境。
ROS支持在Linux、Mac和Windows等操作系统上进行开发,但Linux被广泛认为是最适合进行ROS开发的操作系统。
1.安装ROS:根据操作系统的不同,可通过官方文档中提供的安装指南来安装ROS。
安装完成后,需要设置ROS的环境变量,以便在终端中能够正确地运行ROS命令。
2.创建ROS工作空间:创建一个ROS工作空间,用于存放自己的ROS项目。
在终端中使用命令"mkdir -p catkin_ws/src"来创建一个名为catkin_ws的工作空间,并进入该目录。
3.初始化工作空间:在catkin_ws目录下运行命令"catkin_init_workspace"来初始化工作空间。
然后进入src目录,在该目录下可以创建ROS包来组织自己的代码。
二、ROS开发基础在进行ROS开发前,有几个基本概念和技巧是需要了解和掌握的。
1.节点(Node):ROS中的一个节点是一个执行特定功能的进程,这些节点通过ROS的通信机制来进行信息交换。
在编写ROS程序时,通常需要创建一个节点,该节点负责执行某项任务。
2.话题(Topic):ROS采用发布-订阅模型,其中发布者将数据发布到相应的话题上,而订阅者可以从该话题上获取数据。
话题是一种非持久化的通信方式,即发布者发布数据后,如果没有订阅者接收,数据将会丢失。
3.服务(Service):ROS中的服务机制允许节点通过请求-响应的方式进行通信。
机器人操作系统ROS的安装与应用开发指南

机器人操作系统ROS的安装与应用开发指南机器人操作系统(Robot Operating System,ROS)是一个开源的、灵活的机器人软件平台,它被广泛应用于机器人研发领域。
ROS提供了一系列的工具和库,帮助开发者构建机器人应用程序。
本文将为您介绍ROS的安装方法和应用开发指南,帮助您快速入门ROS的世界。
一、ROS的安装方法1. 确认操作系统:ROS可以运行在多种操作系统上,包括Ubuntu、Debian、Fedora等。
确保您的操作系统版本符合ROS的要求。
2. 安装ROS:您可以通过命令行或者GUI的方式安装ROS。
以Ubuntu为例,可以使用以下命令安装ROS:```sudo apt-get updatesudo apt-get install ros-<distro>-desktop-full```其中,<distro>代表您所选择的ROS版本,如Kinetic、Melodic等。
3. 初始化ROS环境:安装完成后,需要初始化ROS环境。
可以通过以下命令完成初始化:```source /opt/ros/<distro>/setup.bash```4. 配置ROS工作空间:ROS提供了工作空间(workspace)的概念,方便用户组织和管理开发项目。
可以通过以下命令创建并配置工作空间:```mkdir -p ~/catkin_ws/srccd ~/catkin_ws/catkin_makesource devel/setup.bash```至此,ROS的安装已经完成。
您可以通过运行命令`rosversion -d`来验证ROS版本。
二、ROS应用开发指南1. 创建ROS程序包:在ROS中,程序的基本单元是包(package)。
可以使用以下命令创建一个新的ROS程序包:```cd ~/catkin_ws/srccatkin_create_pkg <package_name> std_msgs rospy roscpp```其中,<package_name>代表您所创建的包的名称。
ROS安装教程范文

ROS安装教程范文一、ROS的安装环境1. Ubuntu系统:可以使用Ubuntu 14.04/16.04/18.04/20.04 版本;2. ROS版本:Melodic/Kinetic/Noetic;3. ROS软件仓库:支持ROS软件仓库的操作系统(如:debian/Ubuntu);4. ROS软件包:ROS提供的软件包,如rospy、roscpp、vision_opencv等。
二、ROS安装步骤1.添加ROS软件仓库:在安装ROS前,需要向Ubuntu添加ROS的软件仓库,命令如下:2. 添加ROS的安全key:添加完ROS的软件仓库之后,需要添加ROS的安全key,命令如下:3. 更新Ubuntu的软件包:为了确保安装ROS过程中不会出现错误,建议更新Ubuntu的软件包,命令如下:sudo apt-get update4.安装ROS环境:要安装ROS,需要首先安装ROS环境,命令如下:sudo apt-get install ros-version-desktop-full其中,version表示使用的ROS版本,例如要安装melodic版本,则version=melodic;desktop-full表示安装完整的ROS环境,包括ROS系统基础软件、开发工具以及ROS官方提供的标准软件包。
5.初始化ROS相关环境变量:在使用ROS之前,需要初始化ROS相关环境变量,命令如下:source /opt/ros/version/setup.bash其中,version表示使用的ROS版本(例如melodic),setup.bash 为ROS的设置文件。
6.安装ROS支持的软件包:安装完ROS环境后。
ros control 使用流程

roscontrol使用流程标题:《ROS控制使用流程》ROS(RobotOperatingSystem)是一个开源的软件框架,它为机器人软件开发者提供了一系列的工具和库,使他们能够更有效地开发、测试和部署机器人软件。
本文将详细介绍ROS控制的使用流程,帮助读者更好地理解和应用ROS。
一、安装和配置ROS首先,你需要安装ROS。
根据你的操作系统,选择合适的版本进行安装。
安装完成后,你需要配置环境变量,使得系统能够正确地识别ROS。
二、创建节点和文件在ROS中,所有的机器人操作都是通过节点(Node)进行的。
节点通常包含一些特定的功能,如传感器数据读取、控制指令生成等。
在ROS中,节点是使用XML文件进行定义的,这个文件被称为节点描述文件(NodeDefinitionFile)。
创建节点和文件的过程是非常直观和简单的。
三、启动节点在运行节点之前,你需要将它们添加到你的工作空间中,并使用roslaunch工具启动它们。
启动节点后,你可以通过终端观察节点的运行状态,以及它们产生的数据。
四、编写代码ROS提供了一种名为ROSC++的编程语言,它是一种基于面向对象编程的语言,非常适合机器人软件开发。
你可以使用ROSC++编写控制算法,并将其集成到你的节点中。
在编写代码时,你需要遵循ROS的编程规范和模式,以确保你的代码易于维护和扩展。
五、调试和测试在运行节点之前,你需要对它们进行调试和测试。
你可以使用ROS提供的工具和库来测试你的节点,以确保它们能够正确地运行并产生预期的结果。
六、发布和控制ROS提供了一种发布和控制机制,允许你将控制指令发布到机器人上,并观察机器人的行为。
你可以使用ROS提供的各种传感器和执行器库来访问和控制机器人的各种功能。
七、优化和部署当你完成节点的开发和测试后,你可以对它们进行优化和部署。
你可以使用ROS提供的包管理工具将你的节点打包成可发布的包,并将其部署到其他机器上。
此外,你还可以使用ROS的仿真工具来测试你的节点在真实环境中的表现。
ROS软路由超详细的PCC设置步骤,实现一线多拨,五条宽带叠加

PCC实验一、基本配置,使网络能够正常连通1.pppoe拨号:拨通五个帐号PPPOE client的连接状态,已连接设备NAT:5个接口出去都做NAT创建一个bridge,把其他局域网口添加到bridge中。
添加其他局域网口到bridge中DHCP 服务器设置(局域网自动获取IP地址)局域网的网段为192.168.10.0/24把192.168.10.254作为内网的网关设置网关的地址,接口添加到bridge1上一般我们用DHCP setup来自动设置DHCP server这种设置比较简单快速路由配置:所有的基本配置都设置好了,局域网可以正常上网了,但是为了实现更好的网络环境,我们需要做更好的策略。
这就需要使用PCC了,下面就看看PCC怎么做的吧。
二、PCC的配置Mangle标记标记内网地址为192.168.10.0的五条线路的连接标记标记第一条连接:同理:配置剩余的4调链路:5/1,c2; 5/2.c3; 5/3,c4; 5/4,c5.从连接中提取路由标记:从连接里提取路由标记标记第一条连接c1,命令为R1同理:提出其他4调路由命名为R2,R3,R4,R5.标记连接,的命名配置方式为:[admin@MikroTik] /ip firewall mangle> printFlags: X - disabled, I - invalid, D - dynamic0 chain=prerouting action=mark-connection new-connection-mark=c1passthrough=yes src-address=192.168.10.0/24 dst-address-type=!localper-connection-classifier=both-addresses:5/01 chain=prerouting action=mark-connection new-connection-mark=c2passthrough=yes src-address=192.168.10.0/24 dst-address-type=!localper-connection-classifier=both-addresses:5/12 chain=prerouting action=mark-connection new-connection-mark=c3passthrough=yes src-address=192.168.10.0/24 dst-address-type=!localper-connection-classifier=both-addresses:5/23 chain=prerouting action=mark-connection new-connection-mark=c4passthrough=yes src-address=192.168.10.0/24 dst-address-type=!localper-connection-classifier=both-addresses:5/34 chain=prerouting action=mark-connection new-connection-mark=c5passthrough=yes src-address=192.168.10.0/24 dst-address-type=!localper-connection-classifier=both-addresses:5/4提取路由的命令5 chain=prerouting action=mark-routing new-routing-mark=R1 passthrough=yes src-address=192.168.10.0/24 connection-mark=c16 chain=prerouting action=mark-routing new-routing-mark=R2 passthrough=yes src-address=192.168.10.0/24 connection-mark=c27 chain=prerouting action=mark-routing new-routing-mark=R3 passthrough=yes src-address=192.168.10.0/24 connection-mark=c38 chain=prerouting action=mark-routing new-routing-mark=R4 passthrough=yes src-address=192.168.10.0/24 connection-mark=c49 chain=prerouting action=mark-routing new-routing-mark=R5 passthrough=yes src-address=192.168.10.0/24 connection-mark=c5回程路由设置需要将从那个口进入就从相应的口回去,即保证每个外网口的数据能得到正确的路由同理标记c2,c3,c4,c5的回程路由提取回程路由同理提取c2,c3,c4,c5命令方式:10 chain=input action=mark-connection new-connection-mark=c1 passthrough=yesin-interface=pppoe-out111 chain=input action=mark-connection new-connection-mark=c2 passthrough=yesin-interface=pppoe-out212 chain=input action=mark-connection new-connection-mark=c3 passthrough=yesin-interface=pppoe-out313 chain=input action=mark-connection new-connection-mark=c4 passthrough=yesin-interface=pppoe-out414 chain=input action=mark-connection new-connection-mark=c5 passthrough=yesin-interface=pppoe-out515 chain=output action=mark-routing new-routing-mark=R1 passthrough=yesconnection-mark=c116 chain=output action=mark-routing new-routing-mark=R2 passthrough=yesconnection-mark=c217 chain=output action=mark-routing new-routing-mark=R3 passthrough=yesconnection-mark=c318 chain=output action=mark-routing new-routing-mark=R4 passthrough=yesconnection-mark=c419 chain=output action=mark-routing new-routing-mark=R5 passthrough=yesconnection-mark=c5路由设置添加五条默认路由,指定标记的路由内网PC上开启迅雷下载资料,可以看到所有的拨号出口都有流量。
ROS安装及配置教程
ROS安装方法及设置教程ROS的配置要求CPU和主板–核心频率在100MHz或更高的单核心X86处理器,以及与兼容的主板。
RAM –最小32 MiB, 最大1 GB; 推荐64 MB或更高。
ROM –标准ATA/IDE接口〔SCSI和USB控制器不支持;RAID控制器驱动不支持;SATA不完全支持〕最小需要64 Mb空间;Flash和一些微型驱动器使用ATA接口能连接使用。
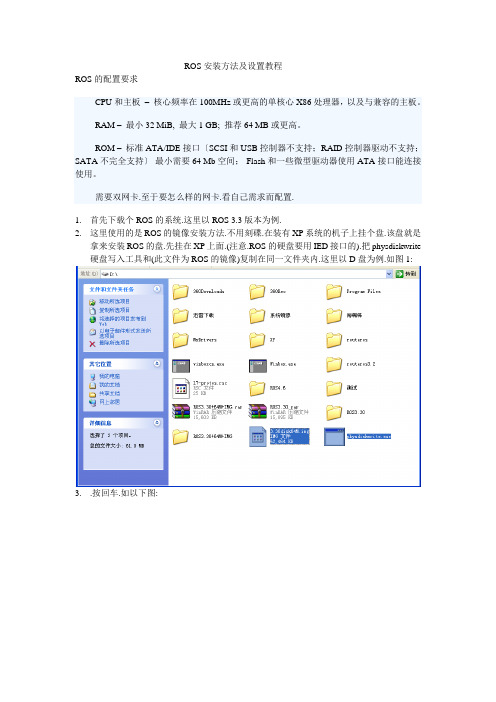
需要双网卡.至于要怎么样的网卡.看自己需求而配置.1.首先下载个ROS的系统.这里以ROS 3.3版本为例.2.这里使用的是ROS的镜像安装方法.不用刻碟.在装有XP系统的机子上挂个盘.该盘就是拿来安装ROS的盘.先挂在XP上面.(注意.ROS的硬盘要用IED接口的).把physdiskwrite 硬盘写入工具和(此文件为ROS的镜像)复制在同一文件夹内.这里以D盘为例.如图1:3..按回车.如以下图:4..接着会问你是否确定.输入y.然后会把镜像写入硬盘.写入完了手动重启即可.如以下图.5.开机之后.会重启几次.当提示输入用户名和密码的时候输入admin.密码为空.直接回车进去.第一次进入程序会自动进展破解.破解完会自动重启(这里下载的这个镜像会自动破解的.如果是另外下载的.请参考他给予的破解方法进展破解).当第二次进入的时候就可以使用了.输入用户名和密码进入就可以使用ROS了.安装到这就完毕了.接下来进展配置. physdiskwrite和这2个工具放到C盘进展安装.)6.配置网卡方法.进入ROS后.输入/int(简写即可)-pri进展查看网卡信息.如以下图:Lan网卡是内网.wan网卡是外网.这些名字是自己改的.初始的名字是ether1和ether2.Lan和wan前面的R表示网卡以激活.为X的话表示未激活.7.输入命令;/ip add进展配置网卡.然后输入add adderss=这里是内网的IP.这里设置为192.168.0.1/24.24表示子网掩码.然后是要修改的网卡名字.完整的命令是如以下图:这里就配置好网卡了.然后在浏览器输入192.168.0.1,这里是路由的IP.点击右边的winbox把winbox下载下来.然后在winbox输入IP.用户名是admin.密码为空.如图.点击链接.进入路由的控制界面.如图:8.进展配置路由.点击如以下图:点击IP-Address设置第二块网卡的IP也就是外网IP比方我的是假设外网IP是:假设外网掩码是:255.255.255.0就这样设Address:Network:Broadcast:Interface:这里选择外网的网卡.我的是wan如以下图:9.增加静态路由再次点去Ip-Route设置路由表.很简单点击+号Destination这个如果用.0/0就表示路由所有ip段其他不懂就不要设了.Gateway:这里就是设网关的输入你的外网网关比方我的外网网关为192.168.1.1.如以下图:10.设置DNS.在IP-DNS这里设置.进入后点击settings设置DNS如以下图:完了点击OK11.设置NAT共享上网点击IP-Firewall设置共享上网选Nat点+选第一项GeneralChain:srcnat选第四项Action设置Action:masquerade这样设置就可以共享上网了.到这就能上网了.接下来就是设置DHCP这些了.12.进入WINBOX后选IP POOL在这里添加地址池,NAME设置为DHCP,ADDRESSES设置192.168.0.*-192.168.0.*这里设置你要分给下面机器的IP段.后进入IP-DHCPSERVER设置网关和DNSNAME=DHCP,INTERFACE=LAN ,lease-time=3d,ADDRESS POOL=DHCP,其他默认~ 如图:在设置ip->dhcp-server->network,address=192.168.0.0/24,gateway=192.168.0.1,netmask=24\dns-server=192.168.0.1?根据ISP给你的DNS来设置如以下图:到这DHCP就设置完成了.接下来设置绑定MAC地址.未绑定的机子不给上网.13.应用要求:将IP与MAC地址绑定,制止改IP与改MAC地址者上网。
机器人操作系统ROS的入门教程与开发实践
机器人操作系统ROS的入门教程与开发实践机器人操作系统(ROS)是一个开源的机器人软件平台,旨在为机器人开发提供通用的软件框架,以提高开发效率和可复用性。
本文将介绍ROS的入门教程,并提供一些开发实践的示例。
一、什么是ROSROS是机器人操作系统的缩写,它并不是一个操作系统,而是一个软件平台,用于开发和管理机器人软件。
ROS提供了一系列的库、工具和约定,使得开发者能够更加方便地编写机器人控制软件。
ROS具有以下特点:1. 基于发布-订阅模型:ROS使用消息传递机制来实现不同节点之间的通信。
一个节点可以发布消息到一个主题,而其他节点可以订阅这个主题来获取消息。
2. 多语言支持:ROS支持多种编程语言,包括C++、Python等,使得开发者能够使用自己熟悉的语言进行开发。
3. 软件包管理:ROS使用软件包来组织和管理代码。
开发者可以轻松地安装、发布和共享自己的软件包。
4. 调试和可视化工具:ROS提供了一些调试和可视化工具,用于监视和分析机器人的运行状态。
二、安装与配置ROS在开始使用ROS之前,您需要先安装ROS并进行基本的配置。
以下是安装和配置ROS的基本步骤:1. 安装ROS发行版:根据您的操作系统版本,选择并安装适当的ROS发行版。
目前ROS最新的发行版是ROS Melodic,在Ubuntu 18.04 LTS上受到广泛支持。
2. 初始化ROS工作空间:在安装完ROS后,您需要创建一个工作空间来存放您自己的ROS软件包。
首先,创建一个目录用于存放工作空间,并初始化工作空间:```$ mkdir -p ~/catkin_ws/src$ cd ~/catkin_ws/$ catkin_make$ source devel/setup.bash```3. 设置环境变量:为了能够在终端中访问ROS命令,您需要将ROS的环境变量添加到.bashrc文件中:```$ echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc$ source ~/.bashrc```三、ROS的基本概念在开始开发机器人应用程序之前,您需要了解一些ROS的基本概念和术语。
使用VScode搭建ROS开发环境的教程详解
使⽤VScode搭建ROS开发环境的教程详解俗话说"⼯欲善其事必先利其器",之前在Ubuntu上运⾏的ROS项⽬都是⽤vim或者gedit编写和修改代码,然后在终端编译运⾏,很不⽅便,函数跳转查看都没办法实现。
所以今天我决定找⼀个⽅便的开发⼯具,也就是找⼀个像Windows上的VS那样的集成开发⼯具(IDE),ROS官⽹上有⼀个不同IDE的对⽐⽂章,⽹址在我选择使⽤VScode.下载安装好VScode后,在扩展栏安装C/C++,CMake,CMake Tools,CodeRunner,ROS(deprecated),Chinese这些插件.接下来⽤⼀个简单的话题发布栗⼦来演⽰操作过程创建ROS⼯作环境⾸先新建⼀个⽂件夹,我命名为test_ros,在该⽂件夹中打开终端,执⾏以下命令来创建ROS⼯作环境:mkdir src && cd srccatkin_init_workspacecd ../catkin_make然后在VScode中打开test_ros⽂件夹,此时的⽂件⽬录如下右键单击src,选择Create Catkin Package,Package命名为helloworld添加roscpp, rospy作为依赖项之后src⽬录下会出现以下⽂件:继续在src/helloworld/src⽬录下添加⼀个cpp⽂件,命名为helloworld.cpp,内容如下:#include <iostream>#include <string>#include <sstream>using namespace std;#include "ros/ros.h"#include "std_msgs/String.h"int main(int argc, char** argv){ros::init(argc, argv, "talker");ros::NodeHandle n;ros::Publisher chatter_pub = n.advertise<std_msgs::String>("chatter", 1000);ros::Rate loop_rate(10);int count = 0;while(ros::ok()){std_msgs::String msg;std::stringstream ss;ss << "hello world " << count;msg.data = ss.str();ROS_INFO("%s", msg.data.c_str());chatter_pub.publish(msg);ros::spinOnce();loop_rate.sleep();count++;}return 0;}此时会提⽰找不到ros/ros.h和std_msgs/String.h,我们继续通过后⾯的步骤来解决.配置.json⽂件接下来配置c_cpp_properties.json,launch.json,tasks.json分别如下:c_cpp_properties.json,⽤于指定C/C++类库和包含路径以及配置按住Fn+F1,找到C/C++:编辑配置(JSON)之后就会⽣产c_cpp_properties.json⽂件,修改⽂件内容如下:{"configurations": [{"name": "Linux","includePath": ["${workspaceFolder}/**","/opt/ros/melodic/include"],"defines": [],"compilerPath": "/usr/bin/gcc","cStandard": "c11","cppStandard": "c++17","intelliSenseMode": "clang-x64","compileCommands": "${workspaceFolder}/build/compile_commands.json"}],"version": 4}其中/opt/ros/melodic/include为ROS相关头⽂件所在的路径,此时可能仍然找不到ros/ros.h和std_msgs/String.h,继续运⾏以下命令即可在build⽂件夹下⽣成compile_commands.json⽂件catkin_make -DCMAKE_EXPORT_COMPILE_COMMANDS=1然后就可以找到ros/ros.h和std_msgs/String.h了launch.json,⽤于调试按住Fn+F5启动调试,就会⽣成launch.json,修改launch.json⽂件内容如下:{// 使⽤ IntelliSense 了解相关属性。
ROS脚本语法使用教程

ROS脚本语法使用教程ROS(Robot Operating System)是一个开源的机器人操作系统,为机器人软件开发提供了强大的工具和库。
在ROS中,可以使用Python或C++编写脚本来控制和操作机器人。
本教程将重点介绍ROS脚本语法的使用,包括ROS中常用的数据类型、主要语法结构以及ROS的常用命令和函数。
一、ROS脚本语法基础1.数据类型在ROS中,常用的数据类型包括:(1)String(字符串):用于存储文本信息。
(2)Int(整数):用于存储整数。
(3)Float(浮点数):用于存储浮点数。
(4)Bool(布尔值):用于存储逻辑值,例如True或False。
2.注释在脚本中,可以使用注释来提高代码的可读性。
注释以"#"开头,可以单行或多行使用。
3.变量在ROS脚本中,变量可以用于存储和操作数据。
变量的命名要符合Python的命名规则,一般以字母或下划线开头,可以包含字母、数字和下划线。
4.条件语句条件语句用于根据不同的条件执行不同的代码块。
常用的条件语句包括if、elif和else。
例如:```pythonif condition:code_blockelif condition:code_blockelse:code_block```5.循环语句循环语句用于多次执行相同的代码块。
常用的循环语句有for循环和while循环。
例如:```pythonfor item in iterable:code_blockwhile condition:code_block```6.函数函数是一段可重用的代码块,可以接受参数并返回结果。
在ROS中,可以使用函数来组织代码和实现功能的封装。
例如:```pythondef function_name(arg1, arg2):code_blockreturn result```二、ROS相关语法和命令1.导入必要的ROS库在脚本中,需要导入ROS相关的库才能使用ROS提供的功能。
QT_plugin的创建和调用方法

class FilterInterface {
public: virtual ~FilterInterface() {} virtual QStringList filters() const = 0; virtual QImage filterImage(const QString &filter, const QImage &image, QWidget* parent)=0;
// 插件名称 virtual QString PluginName() = 0;
// 插件显示在主框架中的图标文件路径 virtual QString PluginIconurl() = 0;
// 插件提供的对外操作接口集 virtual QList<QAction*>* Actions() = 0;
{ Q_OBJECT Q_INTERFACES(FilterInterface)
public:
QStringList filters() const;
QImage filterImage(const QString &filter, const QImage &image,
QWidget *parent);
能模块,以实现整个系统的功能集中,体现出系统的整体性。
2. plugin 接口
通过技术验证得出,目前我们采用动态插件,各个功能的插件实现定义的 统一接口,具体功能放在插件界面中实现,此部分就像开发独立的应用程序, 只是需要注意的是:
① 功能部分的主界面需要继承至插件界面基类:PluginWidget,插件接口 中用具体的实现类指针给插件界面基类指针赋值,在加载插件的主框 架中通过插件接口中定义的基类指针统一调用,利用 C++动态技术动 态识别具体指向的实现类。
学会使用ROS进行机器人程序开发

学会使用ROS进行机器人程序开发机器人程序开发是现代人工智能领域的重要组成部分。
机器人操作系统(ROS)是一个开源的、灵活的软件框架,用于编写机器人软件。
本文将介绍如何学会使用ROS进行机器人程序开发,涵盖基本概念、开发环境搭建、ROS节点、通信机制以及实际应用等方面的内容。
第一章:ROS基本概念在开始学习ROS之前,首先需要了解ROS的基本概念。
ROS 是一种基于节点的分布式架构,节点是ROS的基本计算单元,相当于一个独立的进程。
节点之间可以通过发布与订阅的方法进行通信,发布者发布消息,而订阅者接收并处理消息。
第二章:开发环境搭建学会使用ROS进行机器人程序开发,首先需要搭建ROS开发环境。
ROS支持多种操作系统,包括Ubuntu、Fedora等。
可以通过官方网站下载ROS的安装包,然后按照官方文档的指导进行安装。
第三章:ROS节点通过ROS节点,可以实现不同模块的功能分离,方便程序的开发与维护。
在ROS中,可以使用C++、Python等多种编程语言来编写节点。
通过发布者和订阅者的配对,可以实现节点之间的消息通信。
第四章:通信机制ROS提供了多种通信机制,用于在节点之间传递消息。
常用的通信机制包括话题(topic)、服务(service)和参数服务器(parameter server)等。
话题是一种基于发布与订阅的模式,用于节点之间的消息传递。
服务是一种请求与响应的模式,用于节点之间的同步通信。
参数服务器用于存储和共享节点间的参数配置。
第五章:实际应用学会使用ROS进行机器人程序开发后,可以将所学知识应用到实际项目中。
比如,可以开发一个简单的巡线小车,通过摄像头采集图像进行图像处理,然后控制电机输出控制信号。
另外,也可以开发一款自主导航机器人,通过激光雷达进行环境感知,并规划路径实现导航功能。
第六章:ROS扩展工具除了ROS核心框架外,还存在许多ROS扩展工具,可以进一步扩展ROS的功能。
比如,可以使用RViz进行三维可视化,可视化机器人模型和传感器数据。
「ROS与C入门教程」搭建开发环境(QTros_qtc_plugin)

「ROS 与 C 入门教程」搭建开发环境(QT ros_qtc_plugin)说明:介绍如何搭建 QT 环境来开发 ROS 包介绍 QT 安装介绍 QT 编译和调试 ROS 包测试环境:系统版本:Ubuntu14.04ROS 版本: indigoQT 版本:安装安装前准备,安装相应的 GNU 开发工具集和 OpenGL 开发库,请注意安装软件都需要 root 权限,而且要联网安装 sudo apt-get install build-essential libgl1-mesa-dev下载64位Linux 安装包为。
下载地址:下载的run文件不必定拥有可履行权限,可以履行以下命令开启履行权限(以64 位安装包为例)cd ~/tools/wget桌面下,点击文件,进入 tools ,双击 .run安装文件直接图形界面安装注册帐号,需要邮箱和密码。
可以先进入网站注册帐号,默认安装在下需要的 Qt 组件和工具,默认不安装源码默认Next 完好安装 ,完成后点左上角的Dash home ,输入“ qt ”假如看到QtCreator图标则安装成功设置快捷方式这一步将要更正Qt Creator快捷方式,使从快捷方式启动Qt Creator的同时加载 ROS 环境变量。
打开 terminal ,输入下边的命令: gedit~/.local/share/applications/DigiaQtOpenSource-qtcreator.d esktop 这条命令将打开快捷方式文件,可以看到文件内容以下:;text/x-qt.qml;text/x-qt.qbs;更正Exec变量一行,中间增添bash -i -c即改为Exec=bash -i -c,保存并退出。
增添 bash -i -c 是为了在经过快捷方式启动 Qt Creator 的同时加载 ROS 环境变量假如打开的文件是空,则表示没有找到文件可能是安装路径不在当地用户目录下,也许版本不一样以致的文件名不一致。
qt安装创建项目流程

qt安装创建项目流程Starting with installing Qt for development can be a daunting task for beginners, but with the right guidance and resources, it can be a smooth process. When embarking on this journey, it's essential to ensure that you have all the necessary components and dependencies installed on your system. This includes the Qt framework itself, as well as any additional tools or libraries that may be required for your specific development needs.从安装Qt开始对于初学者来说可能是一个艰巨的任务,但是通过正确的指导和资源,这个过程可以变得更顺利。
在开始这段旅程时,确保您的系统上安装了所有必需的组件和依赖项是至关重要的。
这包括Qt框架本身,以及可能需要的任何额外工具或库来满足您特定的开发需求。
One of the first steps in the Qt installation process is downloading the Qt installer from the official Qt website. This installer provides a user-friendly interface that guides you through the various options and settings for customizing your Qt installation. Make sure to select the appropriate version of Qt for your operating system anddevelopment environment to avoid compatibility issues down the road.Qt安装过程中的第一步之一是从官方Qt网站下载Qt安装程序。
ros路径规划代码开发流程
ros路径规划代码开发流程Developing a ROS (Robot Operating System) path planning code involves several steps. The first step is to clearly define the requirements and objectives of the path planning system. 进行ROS (机器人操作系统)路径规划代码的开发涉及几个步骤。
第一步是清楚地定义路径规划系统的要求和目标。
Once the requirements are defined, the next step is to choose a suitable path planning algorithm. This decision depends on the specific characteristics of the robot and the environment it operates in. 一旦定义了要求,下一步是选择适合的路径规划算法。
这个决定取决于机器人的具体特性和它所在的环境。
After selecting the algorithm, the next phase involves implementing the path planning code. This can be done by writing the necessary scripts or using existing libraries and packages provided by the ROS community. 在选择算法之后,下一阶段涉及实现路径规划代码。
这可以通过编写必要的脚本或使用ROS社区提供的现有库和软件包来完成。
Testing the code is an essential part of the development process. It is important to simulate different scenarios and environments to ensure that the path planning algorithm performs as expected. 测试代码是开发过程中不可或缺的一部分。
ros路径规划代码开发流程

ros路径规划代码开发流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!ROS(Robot Operating System)路径规划代码开发流程一般包括以下步骤:1. 环境搭建安装 ROS 操作系统和相关依赖库。
ros创建工作空间

ros创建工作空间ROS创建工作空间。
在进行ROS开发时,创建一个工作空间是非常重要的一步。
工作空间可以理解为我们存放自己的ROS包的地方,它包含了我们需要的依赖和环境配置。
接下来,我将向大家介绍如何在ROS中创建一个工作空间。
首先,我们需要创建一个新的文件夹作为我们的工作空间。
在终端中,使用以下命令:```bash。
mkdir -p ~/catkin_ws/src。
```。
这个命令将在用户的主目录下创建一个名为catkin_ws的文件夹,并在其中创建一个名为src的子文件夹。
这个src文件夹将用来存放我们自己编写的ROS包。
接下来,我们需要使用catkin_make命令来初始化我们的工作空间。
在终端中,使用以下命令:```bash。
cd ~/catkin_ws。
catkin_make。
```。
这个命令将在catkin_ws文件夹下生成一些必要的文件和文件夹,包括build和devel文件夹。
build文件夹用来存放编译过程中生成的临时文件,而devel文件夹则包含了我们的工作空间的环境变量。
现在,我们的工作空间已经创建好了。
接下来,我们可以在src文件夹下创建我们自己的ROS包。
在src文件夹下,使用catkin_create_pkg命令来创建一个新的ROS包。
这个命令的语法如下:```bash。
catkin_create_pkg <package_name> [depend1] [depend2] [depend3]```。
其中,<package_name>是我们要创建的包的名字,[depend1]、[depend2]、[depend3]等则是我们的包所依赖的其他ROS包。
例如,如果我们要创建一个名为beginner_tutorials的包,并且它依赖于roscpp和std_msgs,那么我们可以使用以下命令:```bash。
cd ~/catkin_ws/src。
catkin_create_pkg beginner_tutorials roscpp std_msgs。
使用QT搭建ROS程序界面(C++)

使⽤QT搭建ROS程序界⾯(C++)需要建⽴ROS⼯作空间,这样可以使⽤CMAKE进⾏编译并⾃动⽣成CMakeLists.txt⽂件。
$mkdir -p ~/catkin_ws/src $cd ~/catkin_ws/src $catkin_init_workspace $cd ~/catkin_ws $catkin_make$cd /src $catkin_create_qt_pkg robomap2.⽬标是为机器⼈开发⼀个SLAM建图界⾯和⾃主导航显⽰界⾯。
参考创客智造教程中的“ROS与QT语⾔⼊门教程-显⽰ROS发布的地图消息”那⼀篇,还需要⾃⼰定义⼀个速度调节滑动条。
2.1 在mapp.ui界⾯加⼊Slider,类名改为ForBackSlider;修改下述代码。
最后在qnode.cpp中调⽤Slider的值,使得节点发布的geometry_msgs::Twist消息的值等于ForBackSlider。
mapp.cpp:slider->setMinimum(0);slider->setMaximum(100);ui->ForBackSlider->setMinimum(0);QObject::connect(ui->ForBackSlider,SIGNAL(valueChanged(int)),this,SLOT(set_speed_value(int));void MAPP::set_speed_value(int slider_value){ForBackSpeed=slider_value;}mapp.h:private slots:void set_speed_value(int s);private:float ForBackSpeed=0.0;CMakeLists.txt:(为了⽀持C++11特性)set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11) 2.2 按钮启动ROS的节点,例如:$roscore 、$roslaunch usb_cam usb_cam_node 等,即不⽤新开终端并输⼊⼀⼤串命令。
ROS基础PPT课件

├── models/ #3D模型文件
├── urdf/
#urdf文件
├── launch/ #launch文件
2020/6/1
.
10
自定义发布topic
publish
/talker
以某一频率
/chatter 发布任何名称的话题
subscribe
/listener
任意数据:
bool、int8、int16、int32、int64、uint、 float、float64、string、time、duration、 header、可变长数组array[]、固定长度数组array[C]
2、node之间的通信也是先由 master进行“牵线”,才能两两的进行 点对点通信。
.
5
理解话题(topic)
注册节点 publish topic /topic_name
node1
master
/topic_name
注册节点 subscribe topic /topic_name
node2
基本的msg包括bool、int8、 int16、int32、int64(以及uint)、 float、float64、string、time、 duration、header、可变长数组 array[]、固定长度数组array[C]。
2020/6/1
.
7
话题和服务的对比
2020/6/1
.
8
3、ROS文件系统
1、创建工作空间
$ mkdir –p catkin_ws/src #创建工作空间
$ cd catkin_ws
#进入工作空间
$ catkin_make
#编译
ClionROS开发环境设置技巧

ClionROS开发环境设置技巧在源环境中启动CLion需要告知CLion ROS特定的环境变量。
通过运⾏来源⼯作空间时,将在当前shell中检索这些变量source ./devel/setup.bash为CLion提供ROS环境变量的最简单⽅法是从同⼀个shell启动IDE。
在获取⼯作空间后,您可以键⼊同⼀终端:在CLion中打开⼀个ROS项⽬在源环境中启动CLion后,执⾏以下操作之⼀以打开ROS项⽬:单击⽂件|打开并选择ROS⼯作区的src⽬录中的CMakeLists.txt,然后选择Open as Project。
单击⽂件|来⾃Sources的新CMake项⽬,并选择⼯作区的src⽬录以从中导⼊项⽬。
该CMake的⼯具窗⼝会显⽰该项⽬加载的状态:设置catkin⼯作空间的构建路径默认情况下,CLion将构建输出放在⾃动创建的cmake-build-debug或cmake-build-release⽬录中。
对于ROS开发,这意味着您将在CLion和运⾏的控制台中拥有两个不同的版本catkin_make。
要在IDE和控制台上进⾏单⼀构建,需要将CLion构建路径设置为catkin⼯作区⽬录。
为此,请转到⽂件|设置Ctrl+Alt+S|构建,执⾏,部署|CMake并更改两个字段:在⽣成路径中,设置workspace_folder/build。
在CMake选项中,添加-DCATKIN_DEVEL_PREFIX:PATH=workspace_folder/devel。
使⽤启动⽂件您可以在CLion中将ROS节点作为常规应⽤程序运⾏和调试。
启动⽂件⽆法直接执⾏,但您可以使⽤XML语法突出显⽰和完成编辑它们,并将调试器附加到正在运⾏的节点。
将调试器附加到正在运⾏的节点1、从命令⾏运⾏.launch⽂件。
例如您可以通过该rosnode list命令检查当前运⾏的节点列表。
在我们的⽰例中,列表将包含talker和listener:2、呼叫运⾏|从主菜单附加到处理或按Ctrl+Alt+F5。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
「ROS与C 入门教程」搭建开发环境(QT ros_qtc_plugin)说明:介绍如何搭建QT环境来开发ROS包介绍QT 安装介绍QT编译和调试ROS包测试环境:系统版本:Ubuntu14.04ROS版本:indigoQT版本:5.8.0QtCreator 安装安装前准备,安装相应的GNU开发工具集和OpenGL 开发库,请注意安装软件都需要root权限,并且要联网安装sudo apt-get install build-essential libgl1-mesa-dev libevent-pthreads-2.0.5 doxygen xorg-dev下载64位Linux 安装包为qt-opensource-linux-x64-5.8.0.run。
下载地址:http://download.qt.io/archive/qt/5.8/5.8.0/qt-opensource-lin ux-x64-5.8.0.run下载的run文件不一定具有可执行权限,可以执行如下命令开启执行权限(以64位安装包为例)cd ~/tools/wgethttp://download.qt.io/archive/qt/5.8/5.8.0/qt-opensource-lin ux-x64-5.8.0.runchmod +x~/tools/qt-opensource-linux-x64-5.8.0.run桌面下,点击文件,进入tools,双击 .run 安装文件直接图形界面安装注册帐号,需要邮箱和密码。
可以先进入网站注册帐号,https://login.qt.io/register.默认安装在/home//Qt5.8.0下需要的Qt组件和工具,默认不安装源码默认Next完整安装,完成后点左上角的Dash home,输入“qt”如果看到QtCreator 图标则安装成功设置快捷方式这一步将要修改Qt Creator快捷方式,使从快捷方式启动Qt Creator的同时加载ROS环境变量。
打开terminal,输入下面的命令:gedit ~/.local/share/applications/DigiaQtOpenSource-qtcreator.d esktop这条命令将打开DigiaQtOpenSource-qtcreator.desktop快捷方式文件,可以看到文件内容如下:[DesktopEntry]Type=ApplicationExec=/home/ubu/Qt5.8.0/Tools/Qt Creator/bin/qtcreatorName=Qt Creator(Community)GenericName=The IDE of choice for Qt development.Icon=QtProject-qtcreatorTerminal=falseCate gories=Development;IDE;Qt;MimeType=text/x-c++src;text/ x-c++hdr;text/x-xsrc;application/x-designer;application/vnd .qt.qmakeprofile;application/vnd.qt.xml.resource;text/x-qml ;text/x-qt.qml;text/x-qt.qbs;修改Exec 变量一行,中间添加bash -i -c 即改为Exec=bash -i -c/home/ubu/Qt5.8.0/Tools/QtCreator/bin/qtcreator ,保存并退出。
添加bash -i -c 是为了在通过快捷方式启动Qt Creator的同时加载ROS环境变量如果打开的文件是空,则表示没有找到DigiaQtOpenSource-qtcreator.desktop文件可能是安装路径不在本地用户目录下,或者版本不同导致的文件名不一致。
可以在~/.local/share/applications/ 和/usr/share/applications/ 两个路径下用ls qt 命令找找看。
如果没有上述快捷方式文件,自己新建一个,只要文件内容类似上面的类容,路径正确即可。
快捷方式可以放在~/.local/share/applications/ 和/usr/share/applications/ 两个位置。
当然也可以放在任意其他位置,功能跟放在上面两个位置一样,但左边的任务栏不会正确显示图标安装ros_qtc_plugin插件Ubuntu 14.04使用apt-get方式安装,会安装5.7版本的Qt Creatorsudo add-apt-repository ppa:levi-armstrong/qt-libraries-trustysudoadd-apt-repository ppa:levi-armstrong/ppasudo apt-get update && sudo apt-get install qt57creator-plugin-ros安装完成在Dash home出现Qt 5.7.1 Creator, 点击即可启动带插件的QtCreator修改系统配置文件让Qt启动器选择新版的Qt$ sudo gedit/usr/lib/x86_64-linux-gnu/qt-default/qtchooser/default.conf 内容为:/usr/lib/x86_64-linux-gnu/qt4/bin/usr/lib/x86_64-linux-gnu 修改成:/home/ubu/Qt5.8.0/5.8/gcc_64/bin/home/ubu/Qt5.8.0/5.8/g cc_64/lib/home/ubu是我的主文件夹绝对路径,请对应修改为自己的。
如果有多个QT版本,可以有不同的默认设置,查找并同样修改/usr/lib/x86_64-linux-gnu/qtchooser/default.conf和/usr/lib/x86_64-linux-gnu/qt-default/qtchooser/default.confr os_qtc_plugin插件新建项目利用插件不仅可以新建工作空间还可以导入现有的工作空间,而“新建文件”中的“ROS”下面的“Package”、“Basic Node”等选项可以创建package和和节点、launch文件、urdf文件等(1)新建项目:“文件”——“新建文件或项目”,选择”Import ROS Workspace”——“choose”然后填写catkin工作空间的名字和位置选择“浏览”——“创建文件夹”,创建一个名为catkin_new的文件夹,如下图,按回车,再选择“打开”在“项目管理”步骤可以配置版本控制系统,我们选择“完成”,如下图建好的工作空间,如果没出现src目录,可以关闭,重开即可。
(2)创建package在catkin_new下面的src上右键单击,选择“添加新文件”,如下图然后选择“ROS”——“package”——“choose”填写package的名字,如test1填写作者(Authors)和维护者(Maintainers),如果你的Qt环境部没有配置中文支持请不要用中文,否则无法新建package或者新建的package里面的package.xml会是空文件在“Dependencies”下的“Catkin”一栏填写依赖,通常用C++写节点需要添加对roscpp的依赖如下图下一步,再点击完成(3)添加新的节点test1的src文件夹上右键单击,选择“添加新文件”选择“ROS”——“Basic Node”——“choose”,创建一个节点,也就是新建一个.cpp文件节点名称写为“node1”,则生成一个名为node1.cpp的源文件用ROS模板新建的node1.cpp的源文件如下图,是自动生成的一个Hello World程序编译节点,为test1的CMakeLists.txt加上下面几行,意思是把node1.cpp编译成名为node1的节点再后面include_directories,添加add_executable(node1src/node1.cpp) target_link_libraries(node1${catkin_LIBRARIES} )如图:修改完CMakeLists.txt之后点击Qt左下角的锤子图标“构建项目catkin_new”点击底边栏的“4 编译输出”可以看到编译结果,如下图(4)运行节点新终端,运行roscore$roscore点击左侧兰的“项目”,在“Build&Run”页测试时候无法选择Packge和Target,不过可以手工填写Arguments。
也可以直接写入执行的命令和参数。
点击左下角的“三角”运行参考:http://download.qt.io/archive/qt/5.8/5.8.0/http://www.aicrob /blog/2013-12-ros_ide_qtcreator.htmlhttps://wizardfo rcel.gitbooks.io/qt-beginning/content/4.htmlhttps://tc. /sites/qtguide/https:///ros-industrial/ros_qtc_pluginhttps:///ros-industrial/ros_qtc_plugin/wiki/1.-How-to-Install-(Users)/u013453604/article/details/52186375/u013453604/article/details/52167213/qt_create/Tutorials/Qt%20App%20Templateshttp://myzharbot.robot-home. it/blog/software/myzharbot-ros/qtcreator-ros/http://www.cie /2014/12/ros-how-to-develop-catkin-pa ckages-from-an-ide.htmlhttps:///ros-industrial/ro s_qtc_plugin/issues?q=is%3Aissue+is%3Aclosed。