五功能遥控玩具车发射接收器解析
无线遥控车发射接收电路
5功能遥控器PT8A977/978的应用电路相关元件PDF下载:PT8A977B C945PT8A978BP PT8A978BW玩具遥控车采用的是伺服电机无线遥控技术。
遥控电路设计的基本要求是高性能、低成本、运行平稳、控制灵活、线路简单、抗干扰能力强。
通常玩具遥控车的驱动要用两个微型直流伺服电动机来实现玩具遥控车的前进、后退、左转、右转和加速等功能。
玩具遥控车市场竞争的日趋激烈,对玩具遥控车的电气性能也提出了越来越高的要求。
玩具遥控车的无线遥控控制电路设计决定着玩具遥控车的整体性能。
文中给出了一种具有优异性能的迷你型玩具遥控车电路的设计方案,该方案主要采用PT8A977/978集成电路控制器来设计完成。
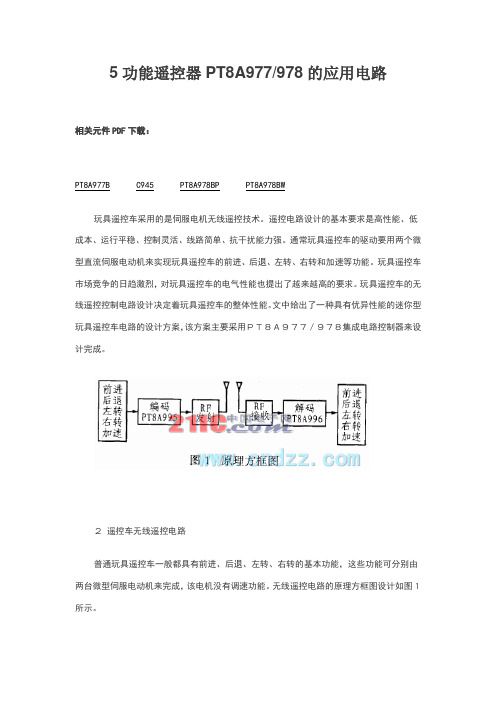
2遥控车无线遥控电路普通玩具遥控车一般都具有前进、后退、左转、右转的基本功能,这些功能可分别由两台微型伺服电动机来完成,该电机没有调速功能。
无线遥控电路的原理方框图设计如图1所示。
该电路由无线发射和无线接收两部分组成,其中无线发射由编码电路和RF发射电路组成。
编码电路使用的集成电路型号是PT8A977,该电路具有5种编码功能,其中F/B用于控制伺服电动机的前进、后退;L/R用于控制伺服电动机的左转、右转;turbo用于加速。
无线接收电路部分的解码电路可以使用PT8A978集成电路芯片来完成,解调后的RF信号在PT8A996中被放大和滤波,然后得到基带信号。
当系统在对该信号进行取样后,解码逻辑便可以提取F/B、L/R和来自接收信号的功能位,同时输出相应的前进、后退、左转、右转和加速功能所用的控制电平。
为了满足玩具遥控车的安全需要,同时还应为伺服电机设计过载保护电路。
3PT8A977/978的主要性能结构PT8A977/978是配套使用的无线遥控编解码集成电路,它们都有5个管脚,对应于5种编/解码功能。
根据外形封装的区别,PT8A977/978分别各有3种序列号,其系列产品如表1所列。
PT8A977/978具有遥控车的完整控制功能,它们的工作电压为2.5~5.0V,当无任何功能键按下时,芯片将自动断电,片上振荡器停止工作,从而减少工作电流。
TX2S中文说明书及应用电路

描述
TX2S 是一顆专为遥控玩具车设计专用发射和接收的大规模集成电路,它采用先进的CMOS 工艺制造。
8PIN 封装技术,降低对封装的需求。
TX2S 内部设计A/D 转换单元,在3个输入脚中保留6个功能键(即前进、后退、左转、右转、加速及附加键)。
⏹ 主要特点:
工作电压范围(V CC ⏹ TX2S :2.0V < VCC < 6.0 =1.5~5.0V )
低静态功耗
TX2S 有自动关机功能
外围组件少
标准8PIN 封装,节省体积及成本
⏹ 管脚排列图
TX2S-DIP8/SOP8
OSC FB LR TF
PC VCC Dout
GND
⏹ 内部框图
LR FB TF
OSC
PC
Dout
⏹ 极限参数
⏹ 电气参数(除非特殊说明,Tamb=25℃,VDD=4.0V,Fosc=128KHZ )
⏹ 管脚描述
⏹ 功能描述
1. 编码方法
串行码格式一帧为 n+4 个脉冲
起始码+功能码
起始码4个 W2
功能码 n 个W 1 其中 W2 为500HZ 频宽比为3/4 W 1 为1KHZ
频宽比为1/2
2. 编码规则
a) 位格式
n X W18mSEC 8mSEC
T
4 W2
b) 数据格式
第一個字
第二個字
第三個字
12345678TX2S 任一功能鍵TX2S 的SO 編碼輸出
RX2S 功能輸出
編碼結束
功能码由n个W1脉冲组成n的不同数值分别表示不同的功能详述如下
⏹建议应用电路
●TX2S
E1A ntenna。
TX2 RX2内置稳压电动玩具车遥控芯片

概述
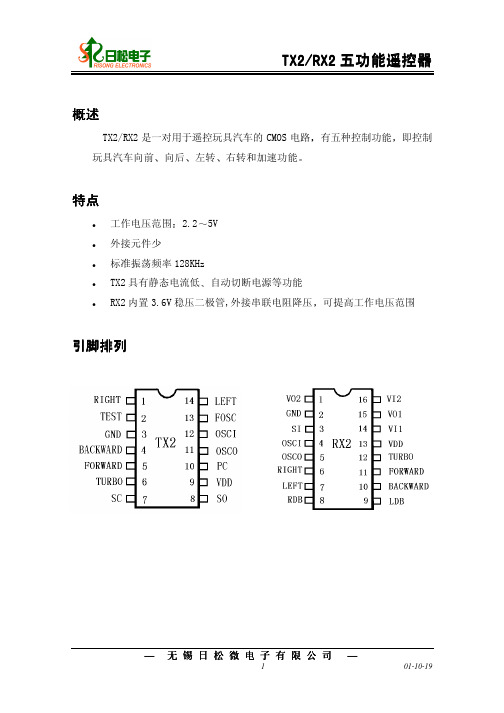
TX2/RX2是一对用于遥控玩具汽车的CMOS电路,有五种控制功能,即控制玩具汽车向前、向后、左转、右转和加速功能。
TX2采用DIP14和SOP14封装,RX2采用DIP16和SOP16封装。
特点
z工作电压范围:2~5V
z外接元件少
z标准振荡频率114KHz,振荡电阻200KΩ
z TX2具有静态电流低、自动切断电源等功能
z RX2内置3.6V稳压二极管,外接串联电阻降压,可提高工作电压范围
引脚排列和说明
RX2
极限值
说明:上述参数绝对不允许超出,否则器件将受到永久性损坏。
也不能在临界条件下长时间工作,否则即使不损坏器件也会影响器件的可靠性。
电特性
TX2
(VDD= 3.6V,FOSC=114KHZ,除非另有说明TA=250C)
RX2
(VDD=3.6V,FOSC=114KHZ,除非另有说明TA=250C)
功能码由n个W1脉冲组成,n的不同数值分别表示不同的功能,详述如下:
)
发射器(TX2Fosc≌114KH
Z Array)
接收器(RX2Fosc≌114KH
Z Array
红外线遥控应用电路
发射器(TX2Fosc≌114KH
)
Z
接收器(RX2Fosc≌114KHZ)
TX2的振荡频率≌RX2的振荡频率,振荡电阻取相同值。
封装尺寸图
TX2:DIP14和SOP14
RX2:DIP16和SOP16。
FMRX2AM(五功能遥控接收IC)中文技术资料
五功能遥控接收 IC
— — 5 0 1.5 — 0.8 20 — —
5
V V uA uA MΩ
1
1.6
Ω
八、 典型应用电路图
C8 102P R6 2.2K R8 4.7M C3 104P
1 2 3 VO2 GND SI OSCI VI2 VO1 VI1 VDD 16 15 14 13 12 11 10 9
3 4 5 6 7 8 9 10 11 12 13 14 15 16
11 GNDP 11 GNDP 10 CK 10 BA BA CK 9 VDDP 9 VDDP
DIP-16(FMRX2AMD)
VO2 VO2 GND GND SI SI OSCI OSCI OSCO OSCO LX LX LEFT LEFT RIGHT RIGHT 1 1 2 2 3 3 4 4 5 5 6 6 7 7 8 8 16 16 15 15 VI2 VI2 VO1 VO1
C11 47P R9 2.2K Q3 C16 10P E1 A NTENNA
L2 3.3uH R14 150K C4 471P C9 332P R12 560 C19 4.7uF
R7 100K
4 5 6
C13 39P
L4 40M
OSCO FORW LX LEFT GNDP BACK
R16 3.3K
VC C
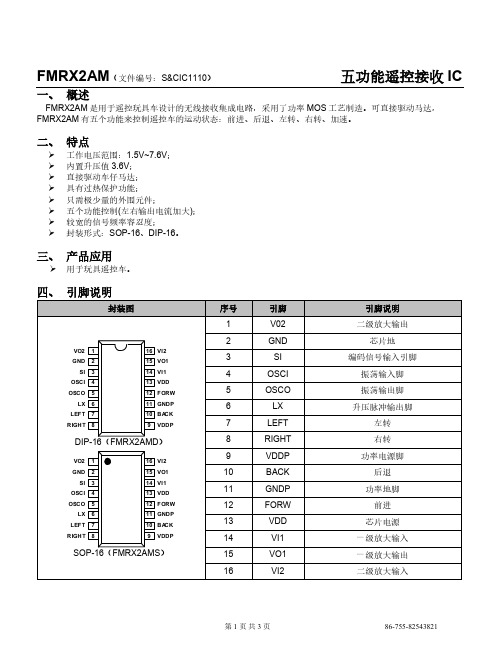
FMRX2AM(文件编号:S&CIC1110)
一、 概述
五功能遥控接收 IC
FMRX2AM 是用于遥控玩具车设计的无线接收集成电路,采用了功率 MOS 工艺制造。可直接驱动马达, FMRX2AM 有五个功能来控制遥控车的运动状态:前进、后退、左转、右转、加速。
二、 特点
TX2S RX2 8脚封装电动玩具车遥控芯片

概述
TX2S 是用于遥控玩具汽车的发射电路,内部设计 A/D 转换单元,在 3 个输入脚中保留 五个功能键(即前进、后退、左转、右转、加速) 。TX2S 采用 SOP8 封装。
特点
z
工作电压范围:1.5~5V 外接元件少 标准振荡频率 128KHz,振荡电阻 220KΩ 按键电阻 56~82KΩ,建议 68KΩ。 具有静态电流低、自动切断电源等功能
深圳市腾芯微科技有限公司
TX2S 五功能遥控发射电路
极限值
参数
电源电压 输入/输出电压 工作温度 储存温度 VDD VIN/VOUT Topr Tstg
符号
-0.3V~5.0V GND-0.2V~VDD+0.2V 10℃~60℃ 25℃~125℃
范围
说明:上述参数绝对不允许超出,否则器件将受到永久性损坏。也不能在临界条件下长时间工作,否则即使不 损坏器件也会影响器件的可靠性。
功能码数(n)
4(W2) 10(W1) 16 22 28 34 40 46 52 58 64
解码结果(RX2)
起始码 前进 前进 加速 前进,向左 前进,向右 后退 后退,向右 后退,向左 向左 向右
V1.0 3
功能遥控发射电路 应用电路图
封装信息
V1.0 4
深圳市腾芯微科技有限公司
其中 W2 为 500HZ,频宽比为 3/4;W1 为 1KHZ ,频宽比为 1/2。
V1.0 2
深圳市腾芯微科技有限公司
TX2S 五功能遥控发射电路
编码规则 A)位格式
8mSEC 4W2
n×W1
8mSEC
1mSEC
T=17mSEC+(n×W1)×1mSEC
遥控小汽车原理
遥控小汽车原理
遥控小汽车是一种通过无线电技术进行操作的玩具车辆。
它由两部分组成:遥控器和小汽车本体。
遥控器是用来发送无线信号的设备,而小汽车则接收该信号并执行相应的操作。
遥控器通过内置的电池提供电力。
当按钮被按下时,电路会关闭,导致电流流经其中的线圈。
线圈中的电流会产生一个强大的磁场。
同时,遥控器中的电路还通过调制器将具有特定频率和编码的信号发送出去。
小汽车内置接收器接收到遥控器发出的信号后,会解码该信号,确定下一步的操作。
接收器中也有一组电池供电,以确保其正常工作。
解码后的信号会传达给电机,从而驱动小汽车的轮子旋转。
通过不同的操作按钮,如前进、后退、转弯等,可以实现小汽车在不同方向上的移动。
此外,小汽车还可以拥有其他功能,如灯光、声音等。
这些功能通常由接收器中的其他电路和电子元件来实现。
例如,当按下按钮时,电路会将电流发送到灯光电路,从而点亮小汽车上的灯光。
总之,遥控小汽车通过遥控器发送无线信号,小汽车接收并解码该信号,然后执行对应的操作,如驱动电机、控制灯光等,从而实现遥控操作。
这种原理是通过无线电技术和内置电池的协同工作来实现的。
遥控车的工作原理

遥控车的工作原理遥控车是一种由人控制的小型玩具车辆,它通过无线信号实现远程操控。
遥控车的工作原理主要涉及到遥控器和车辆之间的信号传输、接收、解码、控制等多个环节。
首先,遥控器是遥控车的操控行为的发送者。
遥控器内置有一个发射器,可以发射无线电频信号。
当我们按下遥控器上的按键时,发射器就会开始工作。
遥控器通常使用无线电波传输信号,主要有两种传输方式,分别是红外线和无线电信号。
在红外线传输方式下,发射器内置有红外线发射二极管,当我们按下按键时,发射二极管会发射红外线信号。
这个红外线信号本质上是一种光信号,它的波长位于可见光和无线电波之间,所以我们是看不见的。
这个信号会从遥控器上发出并传输到接收器上。
而在无线电传输方式下,遥控器会通过一个无线电天线发射无线电波信号。
这个无线电波信号是一种高频电磁波信号,能够在空气中传播并到达接收器所在的位置。
这个无线电波信号会随着遥控器按键的按下而改变。
接收器是遥控车的控制中心。
它内置有一个接收天线,用来接收遥控器发出的信号。
当接收器接收到信号后,会将信号传输到解码器进行解码。
解码器是接收器中的一个重要组成部分,它用来将接收到的信号转化为控制信号。
解码器首先会对接收到的信号进行解调,将信号恢复成原始的频率。
然后,解码器会将这个信号进行解码,将其转化为相应的控制信号。
控制信号是遥控车最终需要的输入信号。
它是由接收器解码器产生的,用来控制车辆的各项功能,比如车辆的前进、后退、转弯等动作。
控制信号会通过导线或者无线电波等方式传输到车辆的控制装置上。
控制装置是遥控车的核心部件,它接收到控制信号后进行相应的处理并控制车辆的运动。
控制装置内置了多种功能模块,比如电机驱动、转向控制、速度调节等。
当控制装置接收到控制信号后,它会根据信号的不同做出相应的动作,如控制电机的正反转、调节转向机构驱动轮子的角度,从而实现车辆的运动。
整个过程中,遥控器和接收器之间的信号传输是通过无线电波或者红外线实现的,这需要遥控器和接收器的天线之间保持一定的传输距离和相对方向,才能保证信号的传输质量。
FMRX2AM(五功能遥控接收IC)

二、 特点
2 2 工作电压范围:1.5V~7.6V; 内置升压值 3.6V; 直接驱动车仔马达; 具有过热保护功能; 只需极少量的外围元件; 五个功能控制(左右输出电流加大); 较宽的信号频率容忍度; 封装形式:SOP-16、DIP-16。
3 3 4 4
三、 产品应用
深圳市富满电子有限公司
SHENZHEN FUMAN ELECTRONICS CO., LTD.
FMRX2AM(文件编号:S&CIC1110)
一、 概述
五功能遥控接收 IC
FMRX2AM 是用于遥控玩具车设计的无线接收集成电路,采用了功率 MOS 工艺制造。可直接驱动马达, FMRX2AM 有五个功能来控制遥控车的运动状态:前进、后退、左转、右转、加速。
五功能遥控接收 IC
— — 5 0 1.5 — 0.8 20 — —
5
V V uA uA MΩ
1
1.6
Ω
八、 典型应用电路图
C8 102P R6 2.2K R8 4.7M C3 104P
1 2 3 VO2 GND SI OSCI VI2 VO1 VI1 VDD 16 15 14 13 12 11 10 9
注:最大连续输出电流视散热条件而定。
五功能遥控接收 IC
符号 VCC DIP-16 额定值 7.6 1 0.96 125 130 -20~85 150 -55~150 350~370 2.8 A 2.5 2.0 A SOP-16 1.5 DIP-16 单位 V W W ℃/W ℃/W ℃ ℃ ℃ ℃
3 4 5 6 7 8 9 10 11 12 13 14 15 16
DIP-16(FMRX2AMD)
VO2 VO2 GND GND SI SI OSCI OSCI OSCO OSCO LX LX 1 1 2 2 3 3 4 4 5 5 6 6 16 16 15 15 VI2 VI2 VO1 VO1
无线遥控玩具汽车电路分析

无线遥控玩具汽车电路分析遥控发射及充电电路工作原理遥控发射电路该遥控发射电路主要以集成块IC1 (TX-2BS)为核心及其他元件组成,其工作原理如在接通电源后,操作遥控器中的功能键,其集成块IC1 相应控制脚接地,内部对应的功能选通,开始进行编码产生与操作功能键相一致的编码信号,然后由其10 脚输出控制编码脉冲信号,同时其12 脚输出高电平控制信号,发射二极管LED 亮,三极管VT2 的B 极有高电平信号而导通工作,三极管VT2 与晶体振荡器B1 组成的载波振荡器工作,产生35MHz 的振荡载波频率,经电容C3 耦合到三极管VT1 的B 极。
当集成块IC1(TX- 2BS)的10 脚输出高电平控制编码脉冲信号时,三极管VT1 导通工作,其功能控制编码脉冲信号及三极管VT2 及晶体振荡器B1 产生的35MHz 载波经三极管VT1 调制放大后,经电容C6、电感L3 耦合发射出去。
遥控车充电电路由于微型无线遥控车其自身较小,没有空间安装5 号电池,生产厂家就采用三节纽扣电池串联使用。
当遥控车没有电时,就把遥控手柄中的插头插入遥控车的插座充电即可使用,其充电电路工作原理见当微型车无电,把遥控手柄中的插头插入遥控车后,遥控器内的+6V 电压通过连接插座进入到遥控车充电电路,该电压加到三极管VT7 的C 极;同时还通过电阻R21,电阻R23 加到三极管VT4 的B 极和E 极;通过电阻R20、电阻R25、电容C10 加到三极管VT3 的B 极和C 极。
由于电容C10 两端电压瞬间不能突变,就给三极管VT3 的B 极提供一定的偏置导通电压,三极管VT3 导通,其C 极电位降低,三极管VT4 的B 极电位降低而导通,+6V 电压经过三极管VT4的E、C 极,电阻R18 加到三极管VT7 的 B 极,三极管VT7 导通,开始给遥控车内电池组充电;同时,该电压经电阻R22 给电容CH 充电,充电指示灯LED1 亮。
遥控玩具车原理图

遥控玩具车原理图
今天介绍这款遥控车采用台湾瑞昱公司生产的专用于遥控车模的CMOS大规模集成电路TX-2/RX-2。
该集成电路具有5种控制功能,即前进、后退加速、左转和右转等。
由于采用了编码发射及解码接收电路,所以具有较高的抗干扰性能。
图2为接收机电路,在发射端发出的高频信号经接收天线接收,Q1、L2、C2、C3等构成的超再生接收电路,L2、C2为并联谐振回路,其作用是选频,C3为超再生正反馈电容,调整L2可改变接收频率。
R1、R2、C5决定超再生的熄灭电压。
接收信号经R4、C7送入译码电路RX-2的{14}脚进行放大,放大后的信号由{1}脚输出经R8送入译码信号输出端{3}脚进行译码。
当译码电路将收到的信号译码后,若是前进信号,则{11}脚输出高电平,Q11导通→Q12、Q13分别导通,+4。
5V等经Q12→MA→MB→Q13→地,电机正转,车子前进,其他功能依此类推,不再赘述。
R9为振荡电阻。
RX-2中的{6}、{7}、{10}、{11}、{12}脚分别为右转、左转、后退、前进、加速等功能的输出端。
R20、D1、C1、C14组成简单的稳压电路,为RX-2提供稳定的工作电压,D2为隔离二极管。
为使该车更加美观逼真,如图2中所示。
用两只小灯泡,两只LED按图安装,小灯泡作遥控车的前大灯使用,LED为倒车灯。
当车子前进时,大灯亮,LED反偏不亮;倒车时在前大灯亮着的同时,LED为正偏也亮起来作倒车灯使用。
夜晚玩车时,更为有趣。
儿童遥控玩具车原理图
⼉童遥控玩具车原理图 要求遥控车由遥控器和被遥控器车两部分组成,其中遥控器上五个控制键控制遥控车的运动,它们分别是前进、后退、加速、左转、右转这五个功能。
遥控器车通过接受遥控器发来的信号来完成相应的前进、后退、加速、左转、右转这五个动作。
同时⼩车在转向的时候亮对应的转向灯。
控制芯⽚的选择SM6136/SM6135是专门为⽆线电遥控车设计的集成电路,性能稳定价格低廉。
SM6136芯⽚把按键信息编制成特殊的串⾏数字编码,经外围电路⾼频调制发射出去。
SM6135接收芯⽚接收经外围线路解调的编码信号,经芯⽚内部的解码电路解码后,送出相应的控制信号去控制⼩车的运⾏。
SM6136芯⽚管脚说明如表1所⽰。
SM6135芯⽚管脚说明如表2所⽰。
电路设计具体电路如上图、下图所⽰。
上图为发射原理图(遥控器部分),下图为接收原理图(遥控器车部分)。
图中的按键信息经SM6136芯⽚编码后由8脚发出,但编码电路产⽣的指令信号都是频率较低的电信号,⽆法直接传送到遥控⽬标上去,将指令信号载在⾼频信号(载波)上送到发射电路,才能由发射天线发送出去。
发射原理图中的Ql、Xl、L1、C2、C3构成了⾼频信号发⽣器,编码信号借助⾼频信号调制后通过发射回路经天线发射出去。
接收机由接收电路及译码电路组成,接收电路⼜包括⾼频部分及解调器部分。
由接收天线送来的微弱信号经接收机⾼频部分的选择和放⼤后,送到解调器。
本设计的译码电路就是由SM6135芯⽚来完成的。
执⾏电路把指令信号放⼤到具有⼀定的功率,⽤以驱动执⾏机构。
执⾏机构将电能转变为机械动作,是⽤来驱动电机的转动,从⽽实现对被控⽬标的转向、前进、后退等功能。
值得注意的是频率,防⽌多台遥控车在⼀起玩时因频率相同⽽相互⼲扰⽆法单独控制。
每个遥控器车都应当选择不同的频率进⾏控制。
在原理图中给出了⼏种不同频率段的元件参数,根据实际情况⾃由选择。
参数不是绝对的,要根据调试时的实际情况作细微调整,以便达到控制灵敏、控制距离长远要求。
无线遥控车原理
无线遥控车原理无线遥控车是一种通过无线电信号控制的小型车辆,它可以实现远程操控,广泛应用于娱乐、科研和工业领域。
无线遥控车的原理主要包括遥控信号发射和接收、电机驱动、车辆控制等几个方面。
下面将从这几个方面详细介绍无线遥控车的工作原理。
首先,无线遥控车的遥控信号发射和接收是实现远程操控的基础。
遥控器通过按键操作产生控制信号,然后通过无线电波将信号发送出去。
接收器在遥控车上接收到信号后,将信号转换成电信号,再通过控制电路进行处理,最终控制车辆的运动。
这一过程中,遥控器和接收器之间需要进行频率配对,以确保信号的稳定传输。
其次,电机驱动是无线遥控车实现运动的关键。
无线遥控车通常采用直流电机作为动力源,电机通过电能转换成机械能,驱动车轮转动,从而实现车辆的前进、后退、转向等动作。
在遥控信号的控制下,电机可以实现不同速度和方向的运动,使遥控车具有灵活的操控性。
最后,车辆控制是无线遥控车实现各种动作的关键。
车辆控制主要包括转向控制、速度控制和其他特殊功能控制。
通过遥控信号的控制,可以实现遥控车的前进、后退、左转、右转等基本动作,同时还可以实现一些特殊功能,如灯光控制、声音控制等。
这些功能的实现需要通过车辆控制电路进行精确的控制和调节。
综上所述,无线遥控车的原理主要包括遥控信号发射和接收、电机驱动、车辆控制等几个方面。
通过遥控器产生控制信号,经过接收器转换成电信号,再通过电机驱动实现车辆的运动,最终通过车辆控制实现各种动作。
这些原理的相互配合,使无线遥控车具有了远程操控的能力,为人们的生活和工作带来了便利。
遥控玩具车专用27MHZ-50MHZ射频接收电路

SDR2000C 说明书遥控玩具车专用27MHZ-50MHZ射频接收电路描述SDR2000C 是针对遥控玩具车设计的专用集成电路,它有五 个功能来控制玩具车的运动(即前进、后退、左转、右转、加 速),同时集成了射频接收电路和马达驱动电路,使客户所需的 外围器件大大减少。
从安全角度考虑,SDR2000C 内部集成了过流检测和过温检 测电路,确保电路和整机处于安全的工作状态。
SDR2000C 采用 DIP-16 封装,无需散热片,大大减小了 PCB 面积。
DIP-16-300-2.54主要特点∗ 极宽的工作电压范围; ∗ 采用标准 CMOS 工艺,极低的功耗; ∗ 集成马达驱动电路,集成 RF 接收电路,极少的外围器件; ∗ 内建升压电路模块; ∗ 内建低压检测电路; ∗ 内建过温及过流保护。
应用∗ 遥控玩具车产品规格分类产品名称 SDR2000C封装形式 DIP-16-300-2.54打印名称 SDR2000C材料 无铅包装 料管内部框图深圳市明月微电子有限公司共6页 第1页版本号:0.4 2010.11.08推荐工作条件参数 工作电压 环境温度符号 VDD Temp测试条件电气参数(测试条件:VDD=4.5V,Temp=25°C )参数 电源 工作电压 工作电流 LVD 低压检测阈值 过温保护阈值 过温保护阈值迟滞 本振 起振时间振幅 RF 接收 灵敏度 马达驱动主驱动等效电阻副驱动等效电阻驱动效率 驱动功率 非交叠时间 过流保护符号测试条件VDD 27MIVDD 49MVLVD TSD TSH27M 模式Ts49M 模式27M 模式Vosc49M 模式SenRonmRonsEff Pout Tcr IovSource 7V Source 5V Source 3V Sink 7V Sink 5V Sink 3V Source 7V Source 5V Source 3V Sink 7V Sink5V Sink3VSDR2000C 说明书最小值 1.5 -20典型值 4.5 25最大值 7.2 85单位 V oC最小值 典型值 最大值 单位1.57.2V6mA7mA1.5V135°C15°C1.2mS1.0mS150200250mV60100130mV-95dBm1Ω1Ω1Ω1Ω1Ω1Ω2Ω2Ω2Ω2Ω2Ω2Ω90%8W120Ns5A深圳市明月微电子有限公司共6页 第2页版本号:0.4 2010.11.08参数 过流检测迟滞管脚排列图SDR2000C 说明书符号 Iovd测试条件最小值典型值 1最大值单位 A管脚描述管脚号 1 2 3 4 5 6 7 8 910,14 11 12 13 15 16管脚名称 VBST C1 C2 LNAP LNAM GNDA OSCI OSCO MT2P GNDP MT2M VDDP MT1M MT1P SWI/O功能说明P升压电路电源输入IO内部检波滤波器的外部电容连接端IO内部检波滤波器的外部电容连接端I低噪放输入端口I低噪放输入端口P模拟地I振荡输入脚O振荡输出脚O转向驱动正端P驱动地O转向驱动负端P驱动电路电源O主马达驱动负端O主马达驱动正端O升压电路开关深圳市明月微电子有限公司 共6页 第3页版本号:0.4 2010.11.08SDR2000C 说明书功能描述SDR2000C 为遥控玩具车专用的射频接收解码及马达驱动电路,它集成了射频接收模块,解码模块和马 达驱动模块。
玩具汽车遥控器原理

玩具汽车遥控器原理
玩具汽车遥控器的原理是利用无线电通讯技术实现远程控制。
遥控器和玩具车分别是遥控器的发送端和接收端。
遥控器内部有一个电路板,上面装有各种电子元器件。
当用户按下遥控器上的按钮时,按钮对应的电子开关会通电,通过控制芯片发出无线电信号。
无线电信号通过天线发射出去,在空中传播,被玩具车上的接收器接收。
接收器收到信号后经过解码处理,将信号转化为电信号。
接收器内部的电路将电信号通过电机驱动装置转化为机械能,从而控制玩具车的方向和速度。
这样,当操作者在遥控器上按下按钮时,玩具车就会相应地做出相应的动作。
值得注意的是,玩具汽车遥控器采用的是一对多通信方式,即一个遥控器可以同时控制多个玩具汽车。
这是因为每个遥控器和玩具车都有一个独特的编码,当接收器收到特定的编码信号时,才会执行对应的命令。
总之,玩具汽车遥控器通过无线电信号实现了与玩具车的远程控制,让操作者可以方便地操控玩具车的运动。
TX2-RX2
说
明
若该引脚接地 则选择右转功能 测试端 电源负端 若该引脚接地 则选择后退功能 若该引脚接地 则选择前进功能 若该引脚接地 则选择加速功能 带载波频率的编码信号输出端 不带载波频率的编码信号输出端 电源正端 电源控制输出端 振荡器输出端 振荡器输入端 该端用于测试方式 若该引脚接地 则选择左转功能
52.70 326.50
52.70 206.30
62.30
52.90
405.10
52.90
— 无锡日松微电子有限公司 —
6
01-10-19
TX2/RX2 五功能遥控器
1&
1&
RX2
1 &
RX2 管脚 编号
1 2 3 4 5 6 7 8
管脚 名称
VO2 GND SI OSCI OSCO RIGHT LEFT RDB
TX2
管脚
管脚
编号
名称
1
RIGHTBD
4
BACKWARDB
5
FORWARDB
6
TURBOB
7
SC
位置座标
X
Y
538.50
52.90
702.50
52.90
822.40
52.90
822.40 207.30
822.60 350.60
813.20 667.20
547.60 664.10
参
数
符号
最小值 典型值
工作电压 工作电流 静态电流 DC O/P 驱动电流 AC O/P 驱动电流 AC O/P 频率
玩具无线遥控原理
玩具无线遥控原理
玩具无线遥控的原理是基于无线电通信技术。
遥控器和玩具之间通过无线电信号进行通信和控制。
遥控器中的控制器通过按钮或摇杆等输入设备,将控制指令转化为电信号。
然后,这些电信号被输入到无线电发射器中。
发射器负责将电信号转化为无线电频率信号,并通过天线发送出去。
玩具中的无线接收器负责接收从遥控器发出的无线电频率信号。
接收到信号后,无线接收器将信号转化为电信号,并通过内置的控制电路进行相应的处理。
然后,电信号被送入玩具的电路系统,控制相应的电机、灯光或其他部件执行相应的操作。
整个过程中,遥控器和玩具之间通过无线电频率信号实现了远程通信和控制。
这种原理在无线遥控玩具中非常常见,并且被广泛应用于各种类型的遥控玩具,例如无人机、遥控车辆、遥控船等。
TX2RX2 五功能遥控器

范围
0.3V 5.0V GND-0.2V VDD+0.2V 10 60 25 125
说明 上述参数绝对不允许超出 否则器件将受到永久性损坏 也不能在临界条件下长时间工作 否则即使不损坏器件也会影响器件的可靠性
电参数
TX2
VDD = 4V, FOSC = 128KHZ, 除非另有说明 TA = 250C
28 34 40 46 52 58 64
解码结果 RX2
起始码 前进 前进 加速 前进 向左 前进 向右 后退 后退 向右 后退 向左 向左 向右
— 无锡日松微电子有限公司 —
5
02-4-4
典型应用电路
发射器(TX-2 Fosc 128KHZ)
TX2/RX2 五功能遥控器
14
13
LEFTB FOSC
100µF
+ -
VCC RF. Circuit GND
16 15 14 13 4.3V VI2 VO1 VI1 VDD
12 TURBO
11
10
FORWARD BACKWARD
VO2 GND SI OSCI
RX-2
OSCO
1
2
3
4
5
B500 KOhm
RIGHT 6
LEFT 7
9 LDB
ROB 8
power switch
B500 KOhm
12
11
OSCI
OSCO
10 PC
9
8
VDD
SO
TX -2
R IG H T B T E ST B G N D B A C K W A R D B FO RW A R D B T U R B O B S C
玩具遥控器原理
玩具遥控器原理
玩具遥控器通过无线电信号传输控制信号,实现对玩具的远程控制。
原理是利用遥控器和玩具之间的红外线或者无线电频率进行通信。
遥控器上面有一组按钮,每个按钮代表着不同的指令。
当用户按下按钮时,遥控器内部的电路会根据按钮的设计发送相应的控制指令。
这些指令会被编码成无线信号并以无线电波或红外线的形式发射出去。
玩具上安装有一个接收器,它可以接收到遥控器发出的无线信号。
接收器内部有一个与遥控器相对应的接收电路,用来解码接收到的信号。
一旦信号被解码,玩具的电路就会执行相应的动作,比如启动电机、改变方向等。
在无线电频率传输中,遥控器和玩具之间需要使用相同的频率进行通信。
这个频率通常由遥控器的制造商确定并设置,确保遥控器和玩具之间的兼容性。
在红外线传输中,遥控器会发射一系列红外信号脉冲,每个脉冲的模式与按下的按钮对应。
玩具的接收器会检测到这些脉冲,并将其转化为相应的指令。
总的来说,玩具遥控器的原理是通过无线信号传输控制指令,实现对玩具的远程操作。
这种原理广泛应用在各类玩具遥控器中,使得用户能够方便地控制玩具的运动和功能。
五功能遥控玩具车发射接收器解析
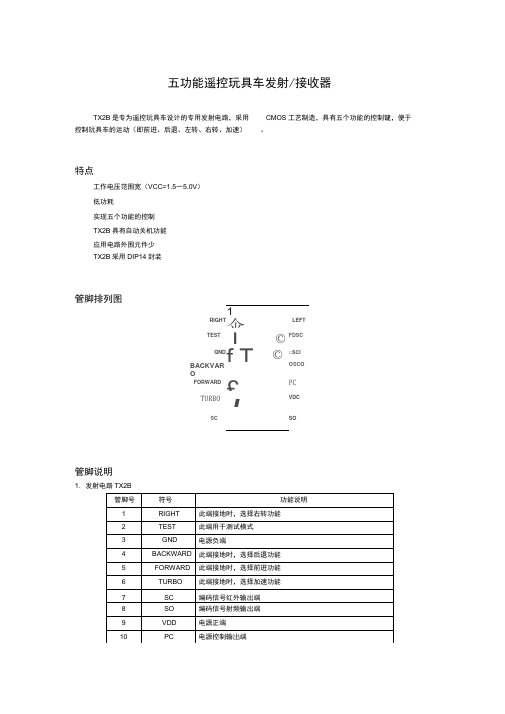
五功能遥控玩具车发射/接收器
TX2B是专为遥控玩具车设计的专用发射电路,采用CMOS工艺制造,具有五个功能的控制键,便于控制玩具车的运动(即前进、后退、左转、右转、加速)。
特点
工作电压范围宽(VCC=1.5〜5.0V)
低功耗
实现五个功能的控制
TX2B具有自动关机功能
应用电路外围元件少
TX2B采用DIP14封装
管脚排列图
1
RIGHT伞LEFT
TEST J©FDSC
QND f T©□SCI
OSCO
BACKVAR
O
FORWARD£PC
TURBO I VDC
SC SO
管脚说明
1. 发射电路TX2B
TX2B内部管脚图
TX2B管脚中心坐标表
直流特性参数
1. 发射电路TX2B(除非特殊说明,Tamb=25C, Fosc=128KHZ
2. 接收电路RX2B(除非特殊说明,Tamb=25Fosc=128KHZ
射频应用示意图
红外应用示意图
3V I 〔.100uF
V -I- <
fosc=114KHZ
4.7Q
红二发射
TX2B
C8050
后退前进加速
右转
典型射频应用图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
五功能遥控玩具车发射/接收器
TX2B是专为遥控玩具车设计的专用发射电路,采用CMOS工艺制造,具有五个功能的控制键,便于控制玩具车的运动(即前进、后退、左转、右转、加速)。
特点
●工作电压范围宽(VCC=1.5~5.0V)
●低功耗
●实现五个功能的控制
●TX2B具有自动关机功能
●应用电路外围元件少
●TX2B采用DIP14封装
管脚排列图
管脚说明
1.发射电路TX2B
TX2B内部管脚图
* 芯片衬底应与PCB的VDD连接
直流特性参数
1.发射电路TX2B(除非特殊说明,Tamb=25℃,Fosc=128KHZ)
2.接收电路RX2B(除非特殊说明,Tamb=25℃,Fosc=128KHZ)
射频应用示意图
红外应用示意图
3V
Ω典型射频应用图。