双支座的模拟
关于 midas软件中一些名词的详细解释
一.名词解释1.单元刚度矩阵eF=e k e 表示由单元杆端位移求单元杆端力的方程,成为局部坐标系中的单元刚度矩阵。
矩阵e k称为单元刚度矩阵。
一般单元刚度矩阵是6X6的方阵,其中每个元素称为单元刚度系数,表示单元杆端位移所引起的杆端力。
2.单元坐标系:在杆件上确立的坐标系x y,其中x轴与杆件重合。
整体坐标系:在复杂结构中,各个杆件的杆轴方向不同,各自的局部坐标系也不同。
为了便于整体分析,而确定的一个统一的坐标系。
用xy表示。
3影响线:当单位集中荷载沿结构移动时,表示某一指定量变化规律的图形,成为该量值的影响线。
4徐变系数:问题总结一.有限元基本原理1.有限元分析的基本步骤:结构离散-----建立单元刚度矩阵-----单元组集成平衡方程-----引起等效节点力和位移边界条件----求解节点位移-----由位移求应变-----由应变求内力。
2.单元刚度如何得到3.空间梁单元具有6个自由度,其单元刚度矩阵的阶数,其中每一刚度系数的含义4.结构的变形、位移和反力是基于整体坐标系还是单元坐标系,单元的应力、内力是基于整体坐标系还是单元坐标系。
5.在梁单元上施加的非节点荷载,如何等效为节点荷载静力等效,指原荷载于节点荷载在任何虚位移上的虚功都相等。
6.在结构分析中,需要设置节点的原则7.在结构分析中,需要设置细分单元的情况8.在单元划分时,应注意事项二.单元类型1.在结构有限元分析时,主要有哪些单元类型桁架单元只受拉单元索单元只受压单元梁单元/变截面梁单元平面应力单元板单元平面应变单元平面轴对称单元空间单元2.什么是平面应力单元,平面应力单元的单元坐标系是如何规定,平面应力单元与平面应变单元的区别平面应力单元只能承受平面方向的作用力,利用它可以建立在单元内均匀厚度的薄板。
单元坐标是由X.Y,Z 三轴构成的,是满足右手螺旋法则的空间直角坐标系系统。
而平面应变单元只能用于线性静定结构分析中,它一般作为坝,或隧道等结构的分析。
(整理)MIDAS支座模拟.

MIDAS中支座的模拟对于空间结构而言,墩柱与梁体连接条件,支座刚度的模拟至关重要。
在我们做的“多支座节点模拟”技术资料里,重点说明了多支座模拟的过程。
首先“在支座下端建立节点,并将所有的支座节点按固结约束”,这是一种模拟实际情况的建模方法。
意思是:在墩顶处结构是全约束的,在各个方向都不可能有位移和转角。
然后“复制支座节点到梁底标高位置生成支座顶部节点,并将支座节点与复制生成的顶部节点用“弹性连接”中的“一般类型”进行连接,并按实际支座刚度定义一般弹性连接的刚度”,这句话的意思是相当于建立一个支座单元,它的三个方向的刚度值则是由实际工程中支座的类型和尺寸来提供。
然后再建立支座顶部节点与主梁节点之间的联系。
此时将利用Civil提供的“刚性连接”,以主梁节点作为主节点,支座顶部单元作为从节点,将其连接起来。
这样做的意思是:将主梁节点与支座顶部节点形成一个受力的整体,目的也是为了真实模拟其受力情况。
在MIDAS中,在使用“弹性连接”中的一般类型时,会要求输入您说到的SDX,SDY,SDZ这三个值,它们分别是指:SDx:单元局部坐标系x轴方向的刚度。
SDy:单元局部坐标系y轴方向的刚度。
SDz:单元局部坐标系z轴方向的刚度。
另外,在弯桥中需要定义支座节点的局部坐标系和BETA角。
这三个值是由由实际桥梁工程使用的橡胶支座类型决定的,也就是说与支座的刚度系数指标有关。
在桥梁工程中,一般使用较多的是板式支座和盆式支座。
其中大桥盆式支座使用相对较多,在输入这种类型支座的刚度值时,一般要么很大,要么取0;中小桥多用板式支座,在输入刚度值时可以根据支座橡胶层厚度来计算即可。
具体的计算式如下:板式橡胶支座的刚度计算式:单元局部坐标系X轴方向刚度:SDx=EA/L单元局部坐标系y ,z轴方向刚度:SDy =SDz=GA / L单元局部坐标系x轴方向转动刚度:SRx=GIp/L单元局部坐标系y.轴方向转动刚度:SRy=EIy/L单元局部坐标系y.轴方向转动刚度:SRz=EIz/L 式中:E、G为板式橡胶支座抗压、抗剪弹性模量;A为支座承压面积;Iy , Iz为支座承压面对局部坐标轴y、z的抗弯惯性矩;Ip 为支座抗扭惯性矩;L为支座净高。
MIDAS多支座模拟注意事项

MIDAS多支座模拟注意事项内容,然后用刚性弹簧(弹性连接的刚性类型)连接主梁节点和支座节点。
但在模拟多支座时,尤其是支座数量多于2个时,这样的模拟方法就不对了,会出现靠近主梁的支反力特别大的情况。
多支座时正确的模拟方法如下:1、要求模拟出支座的高度情况,在支座底部采用一般支承进行全约束(D-ALL,R-ALL);2、用一般弹性连接模拟支座(注意弹性连接的刚度是按照弹簧的局部坐标输入,输入支座的各个自由度的实际刚度);3、主梁节点为主节点,各支座顶部节点为丛属节点建立主从约束刚性连接。
4、额外的操作:对于弯桥建模时,支座的约束方向通常是沿桥的径向和切向,可以通过修改弹性连接的beta角来实现。
不是很赞同支点处支反力的分布,更近似于各个腹板位置集中力作用下的杠杆原理的分布而且支座的竖向刚度并不是很好求,不如球形刚支座的多支座最好用梁格模拟用单主梁模拟多支座的宽箱梁不合适腹板的传力作用和抗扭刚度都不准确宽梁用单梁模拟的确不太合适,不过还是见过不少梁宽15、6m的仍然坚持用单梁模拟。
因此我上面说的应该有个前提,就是针对已经决定用单梁建模的情况,尤其是对弯桥,即使桥面不是很宽,最好还是要按空间分析,这里顺便补充一句,对于弯桥的多支座模拟时,如果用一般弹性连接模拟支座,那么修要修改弹性连接的beta角以保证弹簧的约束方向为该点曲线的切向或径向,如果是用一般支承+刚性弹簧模拟的话,那么需要修改支座节点的局部坐标。
具体的操作我正准备写个资料出来,现在MIDAS主页上已经有最新的9个资料的简介了,包括弯桥、斜桥、抗震、临时支撑等。
其他的资料简介可以参考建筑软件GEN的16份资料简介,因为两个软件的分析内核是一样的。
我想请教各位高手:我最近在建一座2孔的框架桥,框架桥底板与地基采用弹簧支撑来连接,我在输入地基弹性模量(基床系数)时,根据使用说明书中取最大值,最终计算结果变形查看到:框架桥整体向下移动?不知什么原因?是我的支撑条件有问题吗?望给与帮助,谢谢!我认为第三点不好,应该在各支座顶部支点的中心建个节点,以此节点为主节点,主梁节点和支座顶部节点为从属节点建立刚性连接我想,一般的,如果是双支座,可以考虑建立支座节点时按照支座横向位置到梁横向中心的距离作为到主梁节点的值,这只对等截面梁和变宽不大的桥可以这样操作,其设计值一般接近精确值。
opensees中桥梁支座模拟
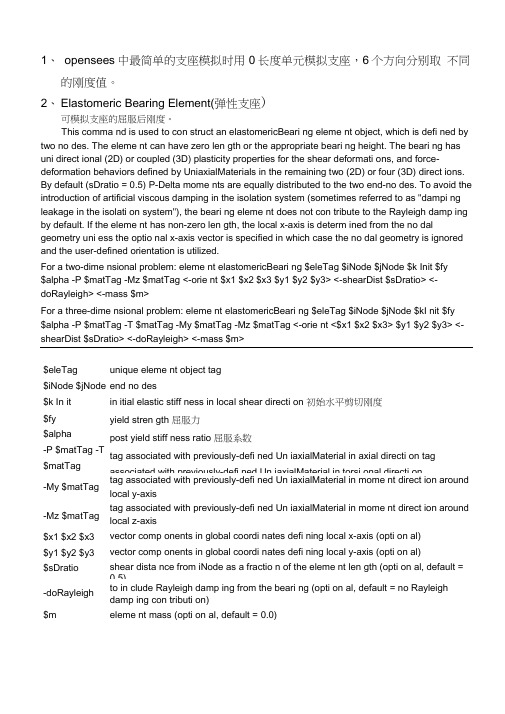
1、opensees中最简单的支座模拟时用0长度单元模拟支座,6个方向分别取不同的刚度值。
2、Elastomeric Bearing Element(弹性支座)可模拟支座的屈服后刚度。
This comma nd is used to con struct an elastomericBeari ng eleme nt object, which is defi ned by two no des. The eleme nt can have zero len gth or the appropriate beari ng height. The beari ng has uni direct ional (2D) or coupled (3D) plasticity properties for the shear deformati ons, and force-deformation behaviors defined by UniaxialMaterials in the remaining two (2D) or four (3D) direct ions. By default (sDratio = 0.5) P-Delta mome nts are equally distributed to the two end-no des. To avoid the introduction of artificial viscous damping in the isolation system (sometimes referred to as "dampi ng leakage in the isolati on system"), the beari ng eleme nt does not con tribute to the Rayleigh damp ing by default. If the eleme nt has non-zero len gth, the local x-axis is determ ined from the no dal geometry uni ess the optio nal x-axis vector is specified in which case the no dal geometry is ignored and the user-defined orientation is utilized.For a two-dime nsional problem: eleme nt elastomericBeari ng $eleTag $iNode $jNode $k Init $fy $alpha -P $matTag -Mz $matTag <-orie nt $x1 $x2 $x3 $y1 $y2 $y3> <-shearDist $sDratio> <-doRayleigh> <-mass $m>For a three-dime nsional problem: eleme nt elastomericBeari ng $eleTag $iNode $jNode $kI nit $fy $alpha -P $matTag -T $matTag -My $matTag -Mz $matTag <-orie nt <$x1 $x2 $x3> $y1 $y2 $y3> <-shearDist $sDratio> <-doRayleigh> <-mass $m>$eleTag $iNode $jNode $k In it$fy$alpha-P $matTag -T $matTag unique eleme nt object tagend no desin itial elastic stiff ness in local shear directi on 初始水平剪切刚度yield stren gth 屈服力post yield stiff ness ratio 屈服系数tag associated with previously-defi ned Un iaxialMaterial in axial directi on tag associated with previously-defi ned Un iaxialMaterial in torsi onal directi on-My $matTag tag associated with previously-defi ned Un iaxialMaterial in mome nt direct ion around local y-axis-Mz $matTag tag associated with previously-defi ned Un iaxialMaterial in mome nt direct ion around local z-axis$x1 $x2 $x3 $y1 $y2 $y3 $sDratio vector comp onents in global coordi nates defi ning local x-axis (opti on al)vector comp onents in global coordi nates defi ning local y-axis (opti on al)shear dista nce from iNode as a fractio n of the eleme nt len gth (opti on al, default = 0.5)-doRayleigh to in clude Rayleigh damp ing from the beari ng (opti on al, default = no Rayleigh damp ing con tributi on)$m eleme nt mass (opti on al, default = 0.0)NOTE:1) If the element has zero length and optional orientation vectors are not specified, the local element axes coincide with the global axes. Otherwise the local z-axis is defined by the cross product between the x- and y-vectors specified on the comma nd line.2) Elastomeric bearings are very stiff in compression, but not rigid. It is not a good idea to specify an extremely large axial stiffness (such as 1E10), because it can lead to problems with numericalsensitivity. Always specify a realistic value for the stiffness of the material that is assigned along the axial direct ion.3) The valid queries to an elastomeric bearing element when creating an ElementRecorder object are 'force,' 'localForce,' 'basicForce,' 'localDisplacement,' 'basicDisplacement' and 'material $matNummatArg1 matArg2 ...' Where $matNum is the nu mber associated with the material whose data is to be output.EXAMPLES:eleme nt elastomericBeari ng 1 1 2 20.0 2.50 0.02 -P 1 -Mz 2; # for a 2D elastomeric beari ng eleme ntelastomericBeari ng 1 1 2 20 2.50 0.02 -P 1 -T 2 -My 3 -Mz 4; # for a 3D elastomeric beari ng iNode3、Flat Slider Bearing Element可模拟四氟乙烯滑板支座以及板式支座的滑动现象。
桥梁博士V4工程案例教程06_桥博V4边界条件模拟介绍算例手册
桥梁博士V4案例教程 边界条件模拟介绍目录1.桥博v4.0 边界条件定义: (1)1.1支座 (1)1.2主从约束与弹性连接 (3)1.3边界条件的设置原则 (4)1.4常见边界条件类型 (6)2.常见桥型的支座边界条件 (7)2.1简支梁桥 (7)2.2连续梁单支座 (8)2.3横向两支座单梁 (8)2.4横向支座数大于2的模拟 (12)2.5主从约束模拟全桥上下部建模 (14)2.6板式橡胶支座的模拟: (15)2.7横梁、桥面板计算的边界条件 (16)2.8三铰拱自由度释放模拟 (16)3.下部及基础结构的边界条件模拟 (17)3.1墩柱与基础的刚性连接 (17)3.2不设基础的墩底边界条件 (18)3.3耦合支座模拟基础 (19)3.4桩土作用自动模拟 (20)1.桥博v4.0 边界条件定义:桥博对于边界条件的控制,主要体现在施工分析的支座模拟,主从约束及弹性连接。
1.1支座支座分为一般支座和耦合弹性支座。
一般支座:以Dx,Dy,Dz,Rx,Ry,Rz,W进行控制。
弹性系数:非刚性约束时,弹性系数参数有效单双向: 正向\负向\双向双向支承:表示支承节点在相应方向不能发生任何位移。
正向支承:表示支承节点只可发生正向位移。
负向支承:表示支承节点在可发生负向位移。
一般支座:Dx-勾选表示结构在该节点处,不能发生延X轴方向位移。
Dy-勾选表示结构在该节点处,不能发生延Y轴方向位移。
Dz-勾选表示结构在该节点处,不能发生延Z轴方向位移。
Rx-勾选表示结构在该节点处,不能发生以x轴为轴线的转动。
Ry-勾选表示结构在该节点处,不能发生以y轴为轴线的转动。
Rz-勾选表示结构在该节点处,不能发生以z轴为轴线的转动。
弹性系数-当不勾选刚性时,对应约束的弹性系数激活。
弹性系数表示每KN或KN*m作用下对应的位移量,单位为KN/m或KN*m/rad,可直接填入系数值。
默认为0表示该方向上不进行约束。
W-七自由度翘曲自由度。
最新MIDAS支座模拟

M I D A S支座模拟MIDAS中支座的模拟对于空间结构而言,墩柱与梁体连接条件,支座刚度的模拟至关重要。
在我们做的“多支座节点模拟”技术资料里,重点说明了多支座模拟的过程。
首先“在支座下端建立节点,并将所有的支座节点按固结约束”,这是一种模拟实际情况的建模方法。
意思是:在墩顶处结构是全约束的,在各个方向都不可能有位移和转角。
然后“复制支座节点到梁底标高位置生成支座顶部节点,并将支座节点与复制生成的顶部节点用“弹性连接”中的“一般类型”进行连接,并按实际支座刚度定义一般弹性连接的刚度”,这句话的意思是相当于建立一个支座单元,它的三个方向的刚度值则是由实际工程中支座的类型和尺寸来提供。
然后再建立支座顶部节点与主梁节点之间的联系。
此时将利用Civil提供的“刚性连接”,以主梁节点作为主节点,支座顶部单元作为从节点,将其连接起来。
这样做的意思是:将主梁节点与支座顶部节点形成一个受力的整体,目的也是为了真实模拟其受力情况。
在MIDAS中,在使用“弹性连接”中的一般类型时,会要求输入您说到的SDX,SDY,SDZ这三个值,它们分别是指:SDx:单元局部坐标系x轴方向的刚度。
SDy:单元局部坐标系y轴方向的刚度。
SDz:单元局部坐标系z轴方向的刚度。
另外,在弯桥中需要定义支座节点的局部坐标系和BETA角。
这三个值是由由实际桥梁工程使用的橡胶支座类型决定的,也就是说与支座的刚度系数指标有关。
在桥梁工程中,一般使用较多的是板式支座和盆式支座。
其中大桥盆式支座使用相对较多,在输入这种类型支座的刚度值时,一般要么很大,要么取0;中小桥多用板式支座,在输入刚度值时可以根据支座橡胶层厚度来计算即可。
具体的计算式如下:板式橡胶支座的刚度计算式:单元局部坐标系X轴方向刚度:SDx=EA/L单元局部坐标系y ,z轴方向刚度: SDy =SDz=GA / L单元局部坐标系x轴方向转动刚度:SRx=GIp/L单元局部坐标系y.轴方向转动刚度:SRy=EIy/L单元局部坐标系y.轴方向转动刚度:SRz=EIz/L式中:E、G为板式橡胶支座抗压、抗剪弹性模量;A为支座承压面积;Iy , Iz为支座承压面对局部坐标轴y、z的抗弯惯性矩;Ip 为支座抗扭惯性矩;L为支座净高。
MIDAS Civil 使用中的一些常见问题
MIDASCivil 使用中的一些常见问题定义移动荷载的步骤a.在主菜单的荷载>移动荷载分析数据>车辆中选择标准车辆或自定义车辆。
b.对于人群移动荷载,按用户定义方式中的汽车类型中的车道荷载定义成线荷载加载(如将规范中的荷载0.5tonf/m**2乘以车道宽3m,输入1.5tonf/m)。
c.布置车道或车道面(梁单元模型选择定义车道,板单元模型选择定义车道面),人群荷载的步行道也应定义为一个车道或车道面。
d.定义车辆组。
该项为选项,仅用于不同车道允许加载不同车辆荷载的特殊情况中。
e.定义移动荷载工况。
例如可将车道荷载定义为工况-1,车辆荷载定义为工况-2。
在定义移动荷载工况对话框中的子荷载工况中,需要定义各车辆要加载的车道。
例如:用户定义了8个车道,其中4个为左侧偏载、4个为右侧偏载,此时可定义两个子荷载工况,并选择“单独”,表示分别单独计算,程序自动找出最大值。
在定义子荷载工况时,如果在“可以加载的最少车道数”和“可以加载的最大车道数”中分别输入1和4,则表示分别计算1、2、3、4种横向车辆布置的情况(15种情况)。
布置车辆选择车道时,不能包含前面定义的人群的步行道。
f.定义移动荷载工况时,如果有必要将人群移动荷载与车辆的移动荷载进行组合时,需要在定义移动荷载工况对话框中的子荷载工况中,分别定义人群移动荷载子荷载工况(只能选择步道)和车辆的移动荷载子荷载工况,然后选择“组合”。
2.关于移动荷载中车道和车道面的定义A.当使用板单元建立模型时a.程序对城市桥梁的车道荷载及人群荷载默认为做影响面分析,其他荷载(公路荷载和铁路荷载)做影响线分析。
b.只能使用车道面定义车的行走路线。
对于城市桥梁的车道荷载及人群荷载以外的荷载,输入的车道面宽度不起作用,按线荷载或集中荷载加载在车道上。
c.对于城市桥梁的车道荷载及人群荷载,在程序内部,自动将输入的荷载除以在”车道面”中定义的车道宽后,按面荷载加载在车道上。
MIDAS软件常见提问与解答
MIDAS软件常见提问与解答Part I. 部分使用说明1.定义移动荷载的步骤●在主菜单的荷载>移动荷载分析数据>车辆中选择标准车辆或自定义车辆。
●对于人群移动荷载,按用户定义方式中的汽车类型中的车道荷载定义成线荷载加载(如将规范中的荷载0.5tonf/m**2乘以车道宽3m,输入1.5tonf/m)。
定义人群移动荷载时,一定要输入Qm和Qq,并输入相同的值。
集中荷载输入0。
●布置车道或车道面(梁单元模型选择定义车道,板单元模型选择定义车道面),人群荷载的步行道也应定义为一个车道或车道面。
●定义车辆组。
该项为选项,仅用于不同车道允许加载不同车辆荷载的特殊情况中。
●定义移动荷载工况。
例如可将车道荷载定义为工况-1,车辆荷载定义为工况-2。
在定义移动荷载工况对话框中的子荷载工况中,需要定义各车辆要加载的车道。
例如:用户定义了8个车道,其中4个为左侧偏载、4个为右侧偏载,此时可定义两个子荷载工况,并选择“单独”,表示分别单独计算,程序自动找出最大值。
在定义子荷载工况时,如果在“可以加载的最少车道数”和“可以加载的最大车道数”中分别输入1和4,则表示分别计算1、2、3、4种横向车辆布置的情况(15种情况)。
布置车辆选择车道时,不能包含前面定义的人群的步行道。
●定义移动荷载工况时,如果有必要将人群移动荷载与车辆的移动荷载进行组合时,需要在定义移动荷载工况对话框中的子荷载工况中,分别定义人群移动荷载子荷载工况(只能选择步道)和车辆的移动荷载子荷载工况,然后选择“组合”。
2.关于移动荷载中车道和车道面的定义●当使用板单元建立模型时a. 程序对城市桥梁的车道荷载及人群荷载默认为做影响面分析,其他荷载(公路荷载和铁路荷载)做影响线分析。
b. 只能使用车道面定义车的行走路线。
对于城市桥梁的车道荷载及人群荷载以外的荷载,输入的车道面宽度不起作用,按线荷载或集中荷载加载在车道上。
c. 对于城市桥梁的车道荷载及人群荷载,在程序内部,自动将输入的荷载除以在”车道面”中定义的车道宽后,按面荷载加载在车道上。
midas支座的模拟方法

MIDAS中支座的模拟弹性连接刚性与刚性连接的区别1、概念解释:1)弹性连接是一种具有6个自由度,类似于梁单元的弹簧单元,弹性连接由两个节点构成,两节点的相对变形由弹性连接的刚度决定,其刚性连接的刚度为模型中最大刚度的100000倍,此时如果模型中人为定义了刚度很大的刚臂单元,则可能会因为弹性连接的刚度过大,导致计算奇异。
2)刚性连接是一种纯粹的边界条件,是节点自由度耦合的一种方式,一个刚性连接是由一个主节点,一个或多个从节点构成,从节点的约束内容与主节点相同,主从节点的相对位移由刚性连接的约束内容决定,如果约束内容只有平动自由度,则主从节点间无相对位移,如果约束内容既有平动自由度也有转动自由度,则主从节点因发生相同的转动位移而导致主从节点有相对的平动位移。
2、弹性连接定义多支座反力:注:如图所示,可以把端横梁定义成弹性连接的刚性,这样端部刚度越大,分配下部的支反力越均匀,如左边显示,三个支座反力均相等;而右边的单梁多支座的定义,计算结果就偏离实际情况,求出的中间支反力最大,这样的结果是错误,建议选用刚性连接的方法来定义单梁多支座。
3、刚性连接定义多支座反力:注:定义多支座反力,尽量选用刚性连接来做。
还有一个问题,用弹性连接的刚性容易出错,因为弹性连接的刚性取的是整个模型中最大刚度的10的5次方倍,如模型中有较大截面时,如承台截面时,在主梁与主塔之间连接,容易造成计算结果奇异;4、建议:1)对于普通模型,用两种方法模拟刚臂均可,对于模型中有大截面或者有大刚度单元时,建议采用刚性连接来处理,防止计算奇异。
2)弹性连接刚性,形象说就是一根“杆”,两者是由一根有形的杆相连接;刚性连接就是两个节点之间有“磁铁”左右,两者之间无刚度约束,而是自由度耦合的方式。
3)弹性连接在施工过程中可以任意激活钝化,刚性连接在施工过程中只能激活,不能钝化。
4)在利用midas做分析的时候,如果模拟满堂支架,建议刚度在10的6次方KN/m,如果定义支座轴向刚度,大概在106~107次KN/m左右。
迈达斯简支梁桥计算模型以及支座模拟
简支梁桥计算模型以及支座模拟简支梁计算示意图在现实状况中简支梁桥两端一般会采用支座或者直接放在墩柱台上,两端支承约束作用是一样的。
最理想做法是采用弹性连接模拟支座各个方向的约束刚度作用,但是计算模型边界条件为什么可以简化成铰支座约束自由度?首先回到结构力学中关于简支梁的定义,两端支座仅提供竖向约束,而不提供转角约束的支承结构。
简支梁为梁桥结构力学简化模型,属于静定结构,两端受铰支座约束,主要承受正弯矩作用,体系温变、混凝土收缩徐变、张拉预应力、支座沉降都不会在梁中产生附加内力。
有人说为了保证两端约束一致,考虑到支座主要是竖向支承作用,两端都采用可动铰结,只关注竖向挠度问题,那这样结构就没有水平约束,成为几何可变体系,不再是稳定结构。
另一方面如果两端都为固定铰支座,那么水平方向的约束就多了一个,变成超静定结构,结构在环境影响(体系温变、混凝土收缩徐变,预应力张拉)或变形影响(如支座沉降、组成材料尺寸偏差)下,结构内部会产生应力。
对于两端都是橡胶支座的梁桥在计算时可简化为一端固定铰结,另一端可动铰结的简支梁模型,三个约束刚好是无多余约束的稳定结构,按照简支梁简化模型进行结构受力计算,这样方便力学分析,虽然两端约束有所差异,但分析的结果与实际相符。
简支梁桥模型边界条件模拟一、采用自由度模拟边界条件一端固定铰接(约束Dx、Dy、Dz、Rx、Rz,释放Ry),一端可动铰接(约束Dy、Dz、Rx、Rz,释放Dx、Ry)。
二、采用弹性连接模拟边界条件首先“在支座底端建立节点,并将所有的支座底节点按固结约束”,这是一种模拟实际情况的建模方法。
在墩顶处结构是全约束的(D-ALL,R-all),即墩顶支座底在各个方向没有位移和转角。
然后“复制支座底节点到支座高度位置生成支座顶部节点,并将支座底节点与复制生成的顶部节点用“弹性连接”中的“一般类型”进行连接,并按实际支座刚度定义一般弹性连接的刚度”建立支座效应,三个方向的刚度值则是由实际工程中支座的类型和尺寸来确定。
支座模拟

MIDAS中支座的模拟 2008-07-22 21:43分类:默认分类字号:大中小对于空间结构而言,墩柱与梁体连接条件,支座刚度的模拟至关重要。
在我们做的“多支座节点模拟”技术资料里,重点说明了多支座模拟的过程。
首先“在支座下端建立节点,并将所有的支座节点按固结约束”,这是一种模拟实际情况的建模方法。
意思是:在墩顶处结构是全约束的,在各个方向都不可能有位移和转角。
然后“复制支座节点到梁底标高位置生成支座顶部节点,并将支座节点与复制生成的顶部节点用“弹性连接”中的“一般类型”进行连接,并按实际支座刚度定义一般弹性连接的刚度”,这句话的意思是相当于建立一个支座单元,它的三个方向的刚度值则是由实际工程中支座的类型和尺寸来提供。
然后再建立支座顶部节点与主梁节点之间的联系。
此时将利用Civil提供的“刚性连接”,以主梁节点作为主节点,支座顶部单元作为从节点,将其连接起来。
这样做的意思是:将主梁节点与支座顶部节点形成一个受力的整体,目的也是为了真实模拟其受力情况。
在MIDAS中,在使用“弹性连接”中的一般类型时,会要求输入您说到的SDX,SDY,SDZ这三个值,它们分别是指:SDx:单元局部坐标系x轴方向的刚度。
SDy:单元局部坐标系y轴方向的刚度。
SDz:单元局部坐标系z轴方向的刚度。
另外,在弯桥中需要定义支座节点的局部坐标系和BETA角。
这三个值是由由实际桥梁工程使用的橡胶支座类型决定的,也就是说与支座的刚度系数指标有关。
在桥梁工程中,一般使用较多的是板式支座和盆式支座。
其中大桥盆式支座使用相对较多,在输入这种类型支座的刚度值时,一般要么很大,要么取0;中小桥多用板式支座,在输入刚度值时可以根据支座橡胶层厚度来计算即可。
具体的计算式如下:板式橡胶支座的刚度计算式:单元局部坐标系X轴方向(竖向)刚度:SDx=EA/L 单元局部坐标系y(顺桥向) ,z(横桥向)轴方向刚度: SDy =SDz=GA / L 单元局部坐标系x轴方向转动刚度:SRx=GIp/L 单元局部坐标系y.轴方向转动刚度:SRy=EIy/L 单元局部坐标系z.轴方向转动刚度:SRz=EIz/L式中:E、G为板式橡胶支座抗压、抗剪弹性模量;(G常温取1Mpa,E=5.4GS2)A为支座承压面积;Iy , Iz为支座承压面对局部坐标轴y、z的抗弯惯性矩;Ip为支座抗扭惯性值;L为支座净高。
MIDAS支座模拟精品文档6页
MIDAS中支座的模拟对于空间结构而言,墩柱与梁体连接条件,支座刚度的模拟至关重要。
在我们做的“多支座节点模拟”技术资料里,重点说明了多支座模拟的过程。
首先“在支座下端建立节点,并将所有的支座节点按固结约束”,这是一种模拟实际情况的建模方法。
意思是:在墩顶处结构是全约束的,在各个方向都不可能有位移和转角。
然后“复制支座节点到梁底标高位置生成支座顶部节点,并将支座节点与复制生成的顶部节点用“弹性连接”中的“一般类型”进行连接,并按实际支座刚度定义一般弹性连接的刚度”,这句话的意思是相当于建立一个支座单元,它的三个方向的刚度值则是由实际工程中支座的类型和尺寸来提供。
然后再建立支座顶部节点与主梁节点之间的联系。
此时将利用Civil提供的“刚性连接”,以主梁节点作为主节点,支座顶部单元作为从节点,将其连接起来。
这样做的意思是:将主梁节点与支座顶部节点形成一个受力的整体,目的也是为了真实模拟其受力情况。
在MIDAS中,在使用“弹性连接”中的一般类型时,会要求输入您说到的SDX,SDY,SDZ这三个值,它们分别是指:SDx:单元局部坐标系x轴方向的刚度。
SDy:单元局部坐标系y轴方向的刚度。
SDz:单元局部坐标系z轴方向的刚度。
另外,在弯桥中需要定义支座节点的局部坐标系和BETA角。
这三个值是由由实际桥梁工程使用的橡胶支座类型决定的,也就是说与支座的刚度系数指标有关。
在桥梁工程中,一般使用较多的是板式支座和盆式支座。
其中大桥盆式支座使用相对较多,在输入这种类型支座的刚度值时,一般要么很大,要么取0;中小桥多用板式支座,在输入刚度值时可以根据支座橡胶层厚度来计算即可。
具体的计算式如下:板式橡胶支座的刚度计算式:单元局部坐标系X轴方向刚度:SDx=EA/L单元局部坐标系y ,z轴方向刚度:SDy =SDz=GA / L单元局部坐标系x轴方向转动刚度:SRx=GIp/L单元局部坐标系y.轴方向转动刚度:SRy=EIy/L单元局部坐标系y.轴方向转动刚度:SRz=EIz/L 式中:E、G为板式橡胶支座抗压、抗剪弹性模量;A为支座承压面积;Iy , Iz为支座承压面对局部坐标轴y、z的抗弯惯性矩;Ip 为支座抗扭惯性矩;L为支座净高。
MIDAS常见问题

MIDAS常见问题本文来自:中国范文网【/】详细出处参考:/post/216.html 相关文章在网站其他栏目里面。
Part I. 部分使用说明1.定义移动荷载的步骤●在主菜单的荷载>移动荷载分析数据>车辆中选择标准车辆或自定义车辆。
●对于人群移动荷载,按用户定义方式中的汽车类型中的车道荷载定义成线荷载加载(如将规范中的荷载0.5tonf/m**2乘以车道宽3m,输入1.5tonf/m)。
定义人群移动荷载时,一定要输入Qm和Qq,并输入相同的值。
集中荷载输入0。
●布置车道或车道面(梁单元模型选择定义车道,板单元模型选择定义车道面),人群荷载的步行道也应定义为一个车道或车道面。
●定义车辆组。
该项为选项,仅用于不同车道允许加载不同车辆荷载的特殊情况中。
●定义移动荷载工况。
例如可将车道荷载定义为工况-1,车辆荷载定义为工况-2。
在定义移动荷载工况对话框中的子荷载工况中,需要定义各车辆要加载的车道。
例如:用户定义了8个车道,其中4个为左侧偏载、4个为右侧偏载,此时可定义两个子荷载工况,并选择“单独”,表示分别单独计算,程序自动找出最大值。
在定义子荷载工况时,如果在“可以加载的最少车道数”和“可以加载的最大车道数”中分别输入1和4,则表示分别计算1、2、3、4种横向车辆布置的情况(15种情况)。
布置车辆选择车道时,不能包含前面定义的人群的步行道。
●定义移动荷载工况时,如果有必要将人群移动荷载与车辆的移动荷载进行组合时,需要在定义移动荷载工况对话框中的子荷载工况中,分别定义人群移动荷载子荷载工况(只能选择步道)和车辆的移动荷载子荷载工况,然后选择“组合”。
2.关于移动荷载中车道和车道面的定义●当使用板单元建立模型时a. 程序对城市桥梁的车道荷载及人群荷载默认为做影响面分析,其他荷载(公路荷载和铁路荷载)做影响线分析。
b. 只能使用车道面定义车的行走路线。
对于城市桥梁的车道荷载及人群荷载以外的荷载,输入的车道面宽度不起作用,按线荷载或集中荷载加载在车道上。
最新midas入门支座模拟资料

MIDAS中支座的模拟弹性连接刚性与刚性连接的区别1、概念解释:1)弹性连接是一种具有6个自由度,类似于梁单元的弹簧单元,弹性连接由两个节点构成,两节点的相对变形由弹性连接的刚度决定,其刚性连接的刚度为模型中最大刚度的100000倍,此时如果模型中人为定义了刚度很大的刚臂单元,则可能会因为弹性连接的刚度过大,导致计算奇异。
2)刚性连接是一种纯粹的边界条件,是节点自由度耦合的一种方式,一个刚性连接是由一个主节点,一个或多个从节点构成,从节点的约束内容与主节点相同,主从节点的相对位移由刚性连接的约束内容决定,如果约束内容只有平动自由度,则主从节点间无相对位移,如果约束内容既有平动自由度也有转动自由度,则主从节点因发生相同的转动位移而导致主从节点有相对的平动位移。
2、弹性连接定义多支座反力:注:如图所示,可以把端横梁定义成弹性连接的刚性,这样端部刚度越大,分配下部的支反力越均匀,如左边显示,三个支座反力均相等;而右边的单梁多支座的定义,计算结果就偏离实际情况,求出的中间支反力最大,这样的结果是错误,建议选用刚性连接的方法来定义单梁多支座。
3、刚性连接定义多支座反力:注:定义多支座反力,尽量选用刚性连接来做。
还有一个问题,用弹性连接的刚性容易出错,因为弹性连接的刚性取的是整个模型中最大刚度的10的5次方倍,如模型中有较大截面时,如承台截面时,在主梁与主塔之间连接,容易造成计算结果奇异;4、建议:1)对于普通模型,用两种方法模拟刚臂均可,对于模型中有大截面或者有大刚度单元时,建议采用刚性连接来处理,防止计算奇异。
2)弹性连接刚性,形象说就是一根“杆”,两者是由一根有形的杆相连接;刚性连接就是两个节点之间有“磁铁”左右,两者之间无刚度约束,而是自由度耦合的方式。
3)弹性连接在施工过程中可以任意激活钝化,刚性连接在施工过程中只能激活,不能钝化。
4)在在利用midas做分析的时候,如果模拟满堂支架,建议刚度在10的6次方KN/m,如果定义支座轴向刚度,大概在106~107次KN/m左右。
MIDAS用户常见问题解答
MIDAS软件常见提问与解答Part I. 部分使用说明1.定义移动荷载的步骤●在主菜单的荷载>移动荷载分析数据>车辆中选择标准车辆或自定义车辆。
●对于人群移动荷载,按用户定义方式中的汽车类型中的车道荷载定义成线荷载加载(如将规范中的荷载0.5tonf/m**2乘以车道宽3m,输入1.5tonf/m)。
定义人群移动荷载时,一定要输入Qm和Qq,并输入相同的值。
集中荷载输入0。
●布置车道或车道面(梁单元模型选择定义车道,板单元模型选择定义车道面),人群荷载的步行道也应定义为一个车道或车道面。
●定义车辆组。
该项为选项,仅用于不同车道允许加载不同车辆荷载的特殊情况中。
●定义移动荷载工况。
例如可将车道荷载定义为工况-1,车辆荷载定义为工况-2。
在定义移动荷载工况对话框中的子荷载工况中,需要定义各车辆要加载的车道。
例如:用户定义了8个车道,其中4个为左侧偏载、4个为右侧偏载,此时可定义两个子荷载工况,并选择“单独”,表示分别单独计算,程序自动找出最大值。
在定义子荷载工况时,如果在“可以加载的最少车道数”和“可以加载的最大车道数”中分别输入1和4,则表示分别计算1、2、3、4种横向车辆布置的情况(15种情况)。
布置车辆选择车道时,不能包含前面定义的人群的步行道。
●定义移动荷载工况时,如果有必要将人群移动荷载与车辆的移动荷载进行组合时,需要在定义移动荷载工况对话框中的子荷载工况中,分别定义人群移动荷载子荷载工况(只能选择步道)和车辆的移动荷载子荷载工况,然后选择“组合”。
2.关于移动荷载中车道和车道面的定义●当使用板单元建立模型时a. 程序对城市桥梁的车道荷载及人群荷载默认为做影响面分析,其他荷载(公路荷载和铁路荷载)做影响线分析。
b. 只能使用车道面定义车的行走路线。
对于城市桥梁的车道荷载及人群荷载以外的荷载,输入的车道面宽度不起作用,按线荷载或集中荷载加载在车道上。
c. 对于城市桥梁的车道荷载及人群荷载,在程序内部,自动将输入的荷载除以在”车道面”中定义的车道宽后,按面荷载加载在车道上。
Midas应用个人心得与总结分享

Midas应用个人心得与总结分享Midas应用个人心得与总结分享从XX年工作后开始学习midas,将所作的计算挑选10个典型,由简入难做一简单总结.附图,因涉及实际设计图纸,模型未附上,仅介绍一下思路和注意事项即自己曾走的弯路。
一、钢筋混凝土弯桥:刚工作后接触的第一个计算:4*20半径70m。
用gqjs直线桥、midas空间梁单元弯桥、桥博梁格法分别建模计算。
midas思路:当时做法excel中计算节点坐标,pl导入cad,dxf 导入midas。
注意局部坐标系的建立,支座与主梁采用刚性连接。
仅与其他软件比较弯矩内力和支反力,未考虑支座预偏心。
二、3-30滑模施工:为与桥博作比较,截面顶面中心对齐,建模节点与梁底节点加刚性连接。
顺便做了模态分析,基频计算与规范理论计算差不多。
通过有效宽度系数考虑应力验算的有效宽度。
注意梯度温差中B的取值、支座沉降组沉降的正负、施工阶段分析中的单元组、混凝土龄期、边界组取变形后、psc设计注意施工阶段用的'荷载定义为施工阶段荷载。
荷载组合中预应力乘以0.8需要手动修改,,但是psc设计用的混凝土设计中的组合系数不用修改,程序自动考虑,工作总结《转载:某工Midas应用个人总结》。
当时对两个程序预应力损失的计算逐项做了一下对比,两者基本吻合。
第四项损失midas未考虑逐根张拉。
我是在施工阶段中将预应力分组在子阶段分批张拉。
三、横向预应力:等效荷载我是定义为用户定义荷载;自动生成组合后用包络再与用户定义荷载组合。
注意1.单向张拉钢束特征值的数据;2.长期组合中仅考虑恒活载,其余可不计。
附:1.根部弯矩一般比计算值大0.15-0.3,可参考城市规范,自己酌情考虑。
2.规范中冲击系数为1.3,有疑问,一般为0.3吧,布置是否笔误。
取1.3的话,承载能力要求太高了。
四、下部结构的联合计算:1)m法对节点采用节点弹性支撑系数的计算。
2)支座刚度的计算,在墩顶考虑支座加了约束3)截面特征系数的调整:0.67或0.85。
(精选)MIDASCivil使用中的一些常见问题

MIDASCivil 使用中的一些常见问题定义移动荷载的步骤a.在主菜单的荷载>移动荷载分析数据>车辆中选择标准车辆或自定义车辆。
b.对于人群移动荷载,按用户定义方式中的汽车类型中的车道荷载定义成线荷载加载(如将规范中的荷载0.5tonf/m**2乘以车道宽3m,输入1.5tonf/m)。
c.布置车道或车道面(梁单元模型选择定义车道,板单元模型选择定义车道面),人群荷载的步行道也应定义为一个车道或车道面。
d.定义车辆组。
该项为选项,仅用于不同车道允许加载不同车辆荷载的特殊情况中。
e.定义移动荷载工况。
例如可将车道荷载定义为工况-1,车辆荷载定义为工况-2。
在定义移动荷载工况对话框中的子荷载工况中,需要定义各车辆要加载的车道。
例如: 用户定义了8个车道,其中4个为左侧偏载、4个为右侧偏载,此时可定义两个子荷载工况,并选择“单独”,表示分别单独计算,程序自动找出最大值。
在定义子荷载工况时,如果在“可以加载的最少车道数”和“可以加载的最大车道数”中分别输入1和4,则表示分别计算1、2、3、4种横向车辆布置的情况(15种情况)。
布置车辆选择车道时,不能包含前面定义的人群的步行道。
f. 定义移动荷载工况时,如果有必要将人群移动荷载与车辆的移动荷载进行组合时,需要在定义移动荷载工况对话框中的子荷载工况中,分别定义人群移动荷载子荷载工况(只能选择步道)和车辆的移动荷载子荷载工况,然后选择“组合”。
2.关于移动荷载中车道和车道面的定义A.当使用板单元建立模型时a. 程序对城市桥梁的车道荷载及人群荷载默认为做影响面分析,其他荷载(公路荷载和铁路荷载)做影响线分析。
b. 只能使用车道面定义车的行走路线。
对于城市桥梁的车道荷载及人群荷载以外的荷载,输入的车道面宽度不起作用,按线荷载或集中荷载加载在车道上。
c. 对于城市桥梁的车道荷载及人群荷载,在程序内部,自动将输入的荷载除以在”车道面”中定义的车道宽后,按面荷载加载在车道上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这里我只说说双支座的模拟,3支座以此类推:
1.不模拟支座的实际高度时-虚拟刚臂法:在实际支座位置建立两个节点,把这两个节点与对应梁上的节点分别连接,建立两个虚拟单元。
虚拟单元的材料容重设为零,弹性模量建议取值10e5~10e10。
然后对所建立的两个节点进行“一般支承”或“节点弹性支承”约束,其中后者可以模拟实际支座的刚度。
2.模拟支座的实际高度时-弹性连接法:在实际支座位置建立两个节点,节点与主梁建模点进行“刚性连接”,主节点为主梁建模点。
将这两个节点向下复制,距离为支座高度+梁高(梁截面以顶对齐时),复制生成的点与对应的点用“弹性连接”进行连接,相应的刚度参考支座厂家的产品介绍。
然后对所复制的节点用“一般支承”进行固结,即约束各个方向的转角和位移。
当然如果不用模拟支座的实际刚度时,相应的刚度可取大值,建议取值范围为10e5~10e10。
楼上的概括的很全面,一般单、两个支座时用第一种方法,多支座时就得用第二种方法了。
以下是MIDAS官方的资料,弯桥支座一般这样模拟:
i. 单、双支座模拟。
在实际支座位置建立节点,定义该节点的节点局部坐标,保证约束方向与曲梁的切向或径向一致,利用弹性连接(刚性)连接支座节点与主梁节点,然后利用一般支承来定义支座节点的约束条件。
ii. 多支座模拟。
对于多支座的情况利用单、双支座的方法会导致反力结果误差较大。
因弹性连接(刚性)在程序中是一种刚度较大的梁单元,传递荷载时,也会发生微小变形,与平截面假定不符。
此时,应在实际支座的顶、底位置分别建立节点,支座底部节点采用一般支承约束(约束D-ALL),利用弹性连接(一般)来模拟支座(输入支座刚度),支座顶节点和主梁节点通过刚性连接来连接。