第12章 控制单元的设计
第12章 分布式系统的应用

缺陷:顺序号丢失(空序)或乱序需要重传或可 能会产生错误。
《分布式系统》(十二) 08-06 24
存储器相关性问题
• 第 3 类的读复制算法是 DSM 系统中普遍采用的。 Li 和Hudak进一步提出了这类算法的3种实现方法。
– 集中管理者算法 – 分布式管理者算法 – 动态分布式管理者算法 (P272)
缺陷:发生颠簸。
《分布式系统》(十二) 08-06
20
存储器相关性问题
3. 读复制算法(转移和复制)
是一个“多读/单写”协议,其写操作:
1) (客户端)如果需要的数据不在本地,确定它的位置, 然后发出请求; 2)(远程主机)收到请求,发出数据对象;(转移) 3) (客户端)收到对象,并对所有拥有数据对象拷贝的站 点发出使无效或更新的组播; 4) (远程主机)收到使无效信号,使本地拷贝无效,或接 受更新信号并且更新本地拷贝;(复制) 5)(客户端)访问数据对象(写)。
设访问控制的文件访问)
• 用本地系统和远程系统的 UID 映射(域映射或域信 任等),以控制访问权; (如 Windows 域信任或 Unix 的
主机信任)
• 分布式系统中,每个用户有一个确定且唯一的 UID , 这个 UID 在任何处理机上有效而且不需要映射。 (全局统一的用户UID和文件访问控制)
《分布式系统》(十二) 08-06 4
分布式操作系统
• 因此,分布式操作系统较网络操作系统的 关键区别是 Tanenbaum 提出的 8 个不同程度 的透明性概念:
– – – – – – – – 访问透明性 并发透明性 错误透明性 位置透明性 移植透明性 并行透明性 性能透明性 复制透明性
(P263)
《分布式系统》(十二) 08-06
计算机组成原理唐朔飞(第2版)课后习题-控制单元的设计(圣才出品)

5.假设 CPU 在中断周期用堆栈保存程序断点,而且进栈时指针减 1(具体操作是先修 改栈指针后存数),出栈时指针加 1。分别写出组合逻辑控制和微程序控制在完成中断返回 指令时,取指阶段和执行阶段所需的全部微操作命令及节拍安排。
答:假设进栈操作是先修改堆栈指针后存数,则出栈操作是先读数后修改堆栈指针。 (1)完成中断返回指令组合逻辑控制的微操作命令及节拍安排: 取指阶段
执行阶段:
(2)完成中断返回指令微程序控制的微操作命令及节拍安排:
取指阶段
T0
PC→MAR,1→R
T1
Ad(CMDR)→CMAR
T2
M(MAR)→MDR,(PC)+1→PC
T3
Ad(CMDR)→CMAR
T4
MDR→IR
5 / 22
圣才电子书 十万种考研考证电子书、题库视频学习平台
执行周期:
⑤STP 指令所需全部微操作命令及节拍安排: 取指周期:
3 / 22
圣才电子书 十万种考研考证电子书、题库视频学习平台
执行周期:
4.在单总线结构的计算机中,用该总线连接了指令寄存器 IR、程序计数器 PC、存储 器地址寄存器 MAR、存储器数据寄存器 MDR、通用寄存器 R0~R7 的输入和输出端。ALU 的两个输入端分别与总线和寄存器 Y 的输出端相连,ALU 的输出端与寄存器 2 的输入端相 连。Y 的输入端与总线连接,2 的输出端与总线连接该机有下列指令:
T5
OP(IR)→微地址形成部件→CMAR
执行阶段
6.已知带返转指令的含义如下所示,写出机器在完成带返转指令时,取指阶段和执行 阶段所需的全部微操作及节拍安排。
答:取指周期:
浅谈水利闸门现地控制单元LCU结构设计

第13卷01期2015年2月南水北调与水利科技South-to-North Water Transfers and Water Science&TechnologyVol13No01Feb2015浅谈水利闸门现地控制单元LCU结构设计周围,刘驰,柳斐(南水北调中线干线工程建设管理局,北京,00038)摘要:为设计美观实用的现地控制单元(LCU):方便操作维护且能适应现场的各种环境,介绍了闸门LCU结构的一些设计原则,结合了机柜的各个部分的结构原理及在工程实际中的经验,对结构设计中遇到的一些具体问题进行了详细介绍和分析,并提岀了解决办法。
LCU结构设计时需考虑安放位置、温度要求、湿度要求、美观要求、外部电源类型、信号数量、动力设备、通信设备等。
按照文中的设计原则和盘面结构原理能设计岀更加完美的LCU,为实现闸门自动控制带来更多便利。
关键词:闸门LCU;设计;机柜中图分类号:TV736文献标志码:B文章编号16721683(2015)001-0255-03The talk about the gate LCU designZHOU Wei,LIU Chi,LIU Fei(Conslruci i o n Adm i n i sLra L i on Bureau of Middle Roue Project in Soulh-Lo-North WaLrr Divis i o n,Be i j ing100038,Ch i na) Abstract:The main purpose of this study is to design a beautiful and practical LCU r convenient operation and maintenance,can adapt to the environment of the scene,t mainly introduces the Design Specifications of Gate LCU Structure.With the experiences of the cabinet principle in the structure of the various parts and in real project it analysis in detailed and process the specific problems which appeared in the process of the projectexecuted.Given the different collection methods。
第12章 通用数字块UDB
何宾 2011.12
本章内容
本章主要是介绍PSoC3内的通用数字块UDB,其内容 主要包括:通用数字块概述、PLD模块、数字通道模块、 状态和控制模块和基于PLD的自定义元件设计等内容。 通用数字块是PSoC3所提供的一个重要功能单元,读者 可以使用Verilog硬件描述语言,定制IP控制器设备,这样 也大大扩展了PSoC3的应用领域。 PSoC3中的UDB使得PSoC和传统MCU相比,有更大的 灵活性。
对于下面的逻辑表达式: X= (A&B)| (~C&D) Y= (A&B)| (C&D)
PLD模块 --PLD模块结构
A C
B
D
X Y Y Y
PLD12C4结构图
PLD模块 --PLD宏单元
PLD的宏单元结构如下图所示。 宏单元的输出驱动布线阵列,输出能被寄存或者组 合。 寄存模式是带有真或取反输入的D触发器,在输入 高和低之间进行切换。输出寄存器能被设置或者复位用 于初始化,或者在布线信号的控制下进行异步操作。
PLD模块 --PLD宏单元(数据通道模块)
名字 A0和A1 功能 累加器 描述 是ALU的源(source)和数据汇入端,也是比较器的源。
D0和D1 数据寄存器 是ALU和比较器的源
F0和F1 FIFO 是与系统总线基本的接口。它们是数据寄存器和累加器 的数据源,它们能从累加器或ALU中捕获数据。每个 FIFO是4个字节的深度。
PLD模块 --PLD宏单元(数据通道模块)
9.数据通道I/O 提供了6个输入和输出将数据通道连接到布线矩阵。 来自布线的输入为布线通道操作所提供的配置,在每个周 期内将被执行,同时这些来自布线的输入也提供了串行数 据的输入。输入能来自其它的UDB块,其它外设,芯片引 脚等。到布线的输出能来自所产生的条件和串行数据输 出。输出能连接到其它的UDB块,其它外设,中断和 DMA控制器,I/O引脚等。
SYNTEC新代连接说明书(硬件)
EZ Series控制器连接说明书(硬件)SYNTECEZ Series控制器连接说明书(硬件)SYNTEC,2009/4版本:V1.0作者:修订日期:98/04/20前言本说明书详细地叙述了将EZ Series控制器的CNC 控制单元连接到机床上所需要的详细的电气和结构的规格。
本说明书给出了SYNTEC CNC通常使用的部件,如第2 章所示的安装尺寸图,并且给出了EZ4-T的接口定义。
相关的其他内容请参阅相应的说明书。
应用的系统型号本说明书适用的系统型号和它们的缩写为说明书的详细内容本说明书包含了从第1到第12章和附录相关的说明书下表列出了与SUPER控制系统相关的说明书。
在该表中,标有*的是本说明书。
注:如果还需要相关的技术支持,请访问新代公司主页有关伺服的说明书有关伺服放大器的说明书请参见各品牌伺服放大器的说明手册目录第一章 EZ Series控制器产品简介 (1)1.1 概述 (1)1.2新一代EZ Series数控系统规格 (3)第二章安装尺寸图以及接口定义图 (4)2.1 EZ 控制器安装尺寸图 (4)2.2 EZ控制器接口定义 (6)第三章安装 (7)3.1 安装环境 (7)3.1.1 电柜外部的环境要求 (7)3.2电源容量 (8)3.2.1 CNC 控制单元的电源容量 (8)3.3机床强电柜的设计和安装条件 (9)3.4电柜的温升设计 (10)3.4.1电柜内部的温升 (10)3.4.2使用热交换器进行散热 (10)3.5防止噪声干扰的方法 (11)3.5.1 信号线的分离 (11)3.5.2 接地 (12)3.5.3 控制单元的信号接地方法 (13)3.5.4 噪音抑制器 (14)第四章电源 (15)4.1本章主要叙述SYNTEC SUPER系列控制单元电源的连接方法。
(15)4.2控制单元的电源的接通与断开 (16)4.2.1控制单元的电源 (16)4.2.2外部24VDC输入电源及电路配置 (16)4.2.3电源的接通顺序 (17)4.2.4电源关断顺序 (18)4.3控制单元的电源连接电缆 (18)4.4 电池 (18)第五章 CNC与外围设备连接 (19)5.1 MDI键的排列 (19)5.2与I/O设备的连接 (20)5.2.1 概述 (20)5.2.2 与I/O设备接口的连接 (20)第六章主轴单元连接 (23)6.1变频主轴 (23)6.1.1 控制器联接埠定义 (23)6.1.2 变频主轴连接事例 (23)6.1.3 配线注意事项 (24)6.2伺服主轴 (25)6.2.1信号规格 (25)6.2.2变频器控制的伺服主轴 (26)6.2.3 伺服单元控制的伺服主轴 (27)第七章伺服单元连接 (28)7.1概述 (28)7.2伺服驱动器连接 (28)7.3输入输出信号规格 (29)7.3.1输入信号规格 (29)7.3.2编码器回授的信号规格 (29)7.4连接插头分布位置和插头定义 (30)7.5 与伺服放大器的连接 (31)7.5.1伺服放大器的连接示意图 (31)7.5.2几种常用伺服单元的连接 (32)第八章机床接口I/O的连接 (37)8.1概述:EMB IO分配简介 (37)8.2注意事项 (37)8.3 EMB的对外联机 (38)8.3.1 EMB的IO接口定义 (38)8.3.2各型号输入和输出端子台介绍 (41)8.3.3各型号输入和输出端子台与CNC连接举例 (48)第九章操作面板连接 (53)9.1概述 (53)9.2手轮连接图 (55)9.3启动停止按钮连接 (56)第十章急停 (57)第十一章以太网通讯 (58)11.1 概述 (58)11.2注意 (58)11.3网线的制作 (59)11.4控制器设置步骤 (60)11.5网络设定 (60)第一章EZ Series控制器产品简介1.1 概述4+1 轴或3+1 轴之最佳性价比控制器新概念CNC系统車床及铣床兩种系列32 bit CPU8 吋全彩液晶显示器前框工业防水设计内建开放式 PLC、MACRO实时断电资料储存最优化操作面板手持式手轮接口国际安规认证EtherNET、可热插入之 CF CARD 读卡机……稳定的产品效能EZ-Series 以全机完全无风扇设计、低发热的思考、以可靠度为设计第一考虑,整机完全模块化、将内部配线最精简化、控制器可靠度大为提升。
计算机组成原理教学设计
《计算机组成原理》教学设计一、该课程应讲授的内容体系1.基本描述【课程中文名称】:计算机组成原理【课程英文名称】:PRINCIPLES OF COMPUTER ORGANIZATION【总学时】:68【讲课学时】:52【实验学时】:16【授课对象】:计算机科学与技术专业、信息安全专业、生物信息技术专业【先修课程】:数字电路设计2.教学定位《计算机组成原理》是计算机科学与技术专业本科教学中的一门重要技术基础课,在计算机科学与技术专业的教学计划中占有重要地位和作用。
学习本课程旨在使学生掌握计算机硬件各子系统的组成原理及实现技术,建立计算机系统的整体概念,对培养学生设计开发计算机系统的能力有重要作用。
该课程为今后学习计算机体系结构、计算机网络、计算机容错技术、计算机并行处理、计算机分布式处理技术等课程打好基础。
3.知识点与学时分配( 1 )第一章计算机系统概论(2.5学时)计算机软硬件概念、计算机系统的层次结构、计算机的基本组成、冯•诺依曼计算机的特点、计算机的硬件框图及工作过程、计算机硬件的主要技术指标和本书结构及学习指南。
( 2 )第二章计算机的发展及应用(0.5学时)计算机的产生、发展及在各个不同领域的应用。
( 3 )第三章系统总线(3学时)总线的基本概念、总线的分类、总线特性及性能指标、总线结构和总线的判优控制及通信控制。
( 4 )第四章存储器(10学时)存储器分类和存储器的层次结构;主存储器(包括半导体存储芯片简介、静态随机存取存储器和动态随机存取存储器、只读存储器、存储器与CPU的连接、存储器的校验、提高访存速度的措施);高速缓冲存储器(包括Cache的基本结构及工作原理、Cache--主存地址映像、替换算法);辅助存储器(包括辅助存储器的特点及主要技术指标、磁记录原理和记录方式、磁盘存储器的结构、光盘存储器的存取原理)。
( 5 )第五章输入输出系统(8学时)输入输出系统的发展概况及组成、I/O与主机的编址方式、传送方式、联络方式以及设备寻址;外部设备分类及简介、I/O接口的功能及基本组成;程序查询方式的工作原理及程序查询接口电路;程序中断方式的工作原理及程序中断接口电路、中断服务流程;DMA方式的特点、DMA接口电路的功能、组成、类型及DMA 的工作过程。
计算机组成原理课程介绍
计算机组成原理课程
四、教学方法
填鸭似的 灌入式 学生参与思索的 启发式 激发学生主动探求答案积极性的 激发式
老师授课时 在每个章节处安排疑点 在每一堂课的前后连接处提出悬念 激发学生学习的兴趣和探索的欲望,引导学生主动思考
(10)控制单元的设计(4 学时) 组合逻辑设计:组合逻辑控制单元框图、微操作节拍安 排、组合逻辑设计举例。 微程序设计:微程序控制单元框图及工作原理、微指令 的编码方式、微指令地址的形成方式、微指令格式、微程序 设计举例。
计算机组成原理课程
二、教材选择
选用普通高等教育 “十一五” 国家级规划教材《计算机组 成原理第 2 版》(唐朔飞编著,高等教育出版社, 2008 年 1月) 该教材是面向 21 世纪课程教材《计算机组成原理》的第 2 版。
计算机组成原理教学设计
哈尔滨工业大学 唐朔飞
2009年10月30日
计算机组成原理教学设计
课程的内容体系 教材选择 课程讲授 作业安排 实验环节 考题设计 成绩评定
计算机组成原理教学设计
一、课程的内容体系
1.基本描述 课程名称:计算机组成原理 课程英文名称:Principles of Computer Organization 课程性质:计算机科学与技术专业必修的核心专业基础课 总学时:68 讲课学时:52 实验学时:16 先修课程:计算机导论、数字逻辑设计、汇编语言程序设计 后续课程:计算机接口技术、计算机系统结构、操作系统等
哈工大是国家 “985” 重点建设的大学,哈工大计算机 科学与技术学科被认定为国家一级重点学科,我们的人才 培养理念是 “研究型、个性化、精英式” 人才。
上海市虹桥商务区徐泾中 QPPO-0102 单元
9、规划执行
根据建设项目规划管理情况,按照对公共和相邻地块利益的影响程度和地块 自身发展的合理程度,控制性详细规划的控制指标和控制线可按《上海市控制性 详细规划技术准则》的有关规定选择执行适用程序,分为甲类、乙类和丙类适用。
7.3 一般性修缮和改造是指:地块的用地性质不变、建筑的使用性质不变、 地块内建筑主体高度基本不变(水箱、电梯井、天线等必要设施的高度改变不计 入建筑限高)、建筑面积不大于已取得的产证核定的建筑面积。
8、规划更新
8.1 附加图则。本控制性详细规划整单元普适图则中划定的重点地区属于城 市各级公共活动中心区,应通过城市设计或专项研究制定附加图则,纳入本控制 性详细规划的法定文件。附加图则是重点地区建设项目许可的必要依据。
8.2 局部地块调整图则。若因为必要的原因引起局部地块的规划调整,应按 法定程序修订该地块所在街坊的普适图则。局部地块调整图则应作为调整后建设 项目许可的必要依据。
4
8.3 控制性详细规划的修编。根据地区发展的实际情况,适时启动本控制性 详细规划的修编。修编后的控制性详细规划法定文件应作为修编后建设项目许可 的必要依据。
9.1 甲类适用:通过建设项目审批程序予以确认。 9.2 乙类适用:在建设项目审批过程中,通过专家或专业部门论证程序予以 确认。 9.3 丙类适用:通过修建性详细规划的编制和审批予以确认。
第二章 功能定位与发展规模
1、发展目标和功能定位
本控制性详细规划所在地区的发展目标主要有两个,即为全市提供保障性住 房及普通商品房的大型居住社区选址区域以及为大型会展设施提供综合公共服 务设施配套功能区。
第12章 单片机应用系统设计举例
a)路路路路路路
b)路测路路
增强型8051单片机实用开发技术
9/24
4.电机驱动电路 .
U11 PWMP PWMN VCC R29 1K R30 1K 3 19 13 18 20 1 9 10 11 12 IN1 IN2 D2 D1 DNC AGND PGND PGND PGND PGND MC33886 OUT1 OUT1 OUT2 OUT2 DNC V+ V+ V+ Ccp FS 6 7 14 15 8 4 5 16 17 2 VBAT J1 2 1 Header 2
U13 IN GND OUT OUT 2 4 C14 47uF
VCC
REG1117-5
C15 0.1uF
增强型8051单片机实用开发技术
11/24
12.1.4 12.1.4 系统软件设计
单片机的检测报警程序采用C语言编写。 单片机的检测报警程序采用 语言编写。 语言编写 单片机的7个 单片机的 个ADC转换通道对小车路径检测的模拟量进 转换通道对小车路径检测的模拟量进 行采样, 行采样,进行二值化和坐标变换后得到小车中心与路径的 偏差, 偏差,然后根据偏差大小对舵机转角和小车速度进行相应 的调整。由于舵机和电机驱动对PWM频率要求差别较大, 的调整。由于舵机和电机驱动对 频率要求差别较大, 频率要求差别较大 驱动电机的PWM由单片机内部 由单片机内部PWM模块产生,而驱动舵 模块产生, 驱动电机的 由单片机内部 模块产生 机的PWM则由定时器 产生。 则由定时器T0产生 机的 则由定时器 产生。
增强型8051单片机实用开发技术
具体程序请参见教材!!! 具体程序请参见教材!!!
增强型8051单片机实用开发技术
12.2 基于实时操作系统 基于实时操作系统uC/OS-II的压力测控系统 的压力测控系统
计算机组成原理第2版高教唐朔飞

输入设备
运算器
输出设备
控制器
完整ppt课件
指挥程序 运行
11
冯·诺依曼计算机硬件框图
1.2
输入设备
存储器 运算器
输出设备
控制器
完整ppt课件
12
二、计算机硬件框图
1.2
1. 以存储器为中心的计算机硬件框图
控制器
数据 输入设备
程序
存储器
计算 输出设备
结果
运算器
完整ppt课件
13
2.现代计算机硬件框图
虚拟机器 M3 虚拟机器 M2
虚拟机器
机器语言
实际机器 M1
微指令系统
微程序机器 M0
完整ppt课件
7
虚拟机器 M4
虚拟机器 M3
软 件 虚拟机器 M2
用编译程序翻译 成汇编语言程序
用汇编程序翻译 成机器语言程序
1.1
用机器语言解释操作系统
硬 实际机器 M1
用微指令解释机器指令
件
微程序机器 M0
由硬件直接执行微指令
1.2
ACC MQ ALU
X
运算器
指令
减M
初态 ACC [M]
[ACC]-[X]
被减数 X ACC
完整ppt课件
23
③ 乘法操作过程
1.2
AC0 C MQ
AALUU
X
运算器
指令
乘M
初态 ACC [M]
[ACC]
0
[X]×[MQ]
完整ppt课件
被乘数 MQ X
ACC MQ ALU
X
运算器
ACC
MQ
加法 被加数 和
பைடு நூலகம்
西咸新区控制性详细规划
操作系统第五版1-12章课后题中文答案

复习题:1.1、列出并简要地定义计算机的四个主要组成部分。
答:主存储器,存储数据和程序;算术逻辑单元,能处理二进制数据;控制单元,解读存储器中的指令并且使他们得到执行;输入/输出设备,由控制单元管理。
1.2、定义处理器寄存器的两种主要类别。
答:用户可见寄存器:优先使用这些寄存器,可以使机器语言或者汇编语言的程序员减少对主存储器的访问次数。
对高级语言而言,由优化编译器负责决定把哪些变量应该分配给主存储器。
一些高级语言,如C语言,允许程序言建议编译器把哪些变量保存在寄存器中。
控制和状态寄存器:用以控制处理器的操作,且主要被具有特权的操作系统例程使用,以控制程序的执行。
1.3、一般而言,一条机器指令能指定的四种不同操作是什么?答:这些动作分为四类:处理器-寄存器:数据可以从处理器传送到存储器,或者从存储器传送到处理器。
处理器-I/O:通过处理器和I/O模块间的数据传送,数据可以输出到外部设备,或者从外部设备输入数据。
数据处理,处理器可以执行很多关于数据的算术操作或逻辑操作。
控制:某些指令可以改变执行顺序。
1.4、什么是中断?答:中断:其他模块(I/O,存储器)中断处理器正常处理过程的机制。
1.5、多中断的处理方式是什么?答:处理多中断有两种方法。
第一种方法是当正在处理一个中断时,禁止再发生中断。
第二种方法是定义中断优先级,允许高优先级的中断打断低优先级的中断处理器的运行。
1.6、内存层次的各个元素间的特征是什么?答:存储器的三个重要特性是:价格,容量和访问时间。
1.7、什么是高速缓冲存储器?答:高速缓冲存储器是比主存小而快的存储器,用以协调主存跟处理器,作为最近储存地址的缓冲区。
1.8、列出并简要地定义I/O操作的三种技术。
答:可编程I/O:当处理器正在执行程序并遇到与I/O相关的指令时,它给相应的I/O模块发布命令(用以执行这个指令);在进一步的动作之前,处理器处于繁忙的等待中,直到该操作已经完成。
第12章工业应用规划技术

15
第三节 软件设计
三、状态流程图设计法
定义
它是完整地描述控制系统的控制过程、功能和特 性的一种图形,是分析和设计电气控制系统顺序控制 程序的一种重要工具。同时,它又是一种通用的技术 语言,可以为不同专业的工程技术人员进行技术交流 提供服务。
16
第四节 输入输出端口的扩展及保护
一、输入、输出端口的扩展
4
第一节 PLC应用规划的内容及步骤
一、控制功能调查
首先对被控对象的工艺过程、工作特点、功能和特性 进行认真分析,并通过与有关工程技术人员的共同协 作,明确控制任务和设计要求,制定出详实的工作循 环图或控制状态流程图。然后,根据生产环境和控制 要求确定采用何种控制方式。
5
第一节 PLC应用规划的内容及步骤
具有随意性
11
第三节 软件设计
二、逻辑设计法 定义
是以控制系统中各种物理量的逻辑 关系出发的设计方法。
特点
具有严密可循的规律性和可行的设 计步骤,也有简便、直观和十分规范的 特点。
12
第三节 软件设计
设计思想
控制过程由若干个状态组成;每个状态都是由 于接受了某个主令信号而建立;各记忆元件用于区 分各状态,并构成执行元件的输入变量;正确地写 出各中间记忆元件逻辑函数式和执行元件的逻辑函 数式,也就完成了程序设计的主要任务。
可编程控制器应用技术
第十二章 可编程控制器的工业 应用规划技术
目录
PLC应用规划的内容及步骤 设备配置 软件设计 输入输出端口的扩展及保护 PLC应用的可靠性技术
1
内容提要
PLC的工业应用规划是PLC应用中的重要环节。本 章在前述章节的基础上对PLC控制系统规划的内容、 步骤、应用程序的设计方法以及适用场合等做了进一 步的说明,并讨论了PLC控制系统输入输出口扩展及 提高系统可靠性的方案。
计算机组成原理第10章习题指导
T0 MDR→Bus→R2 R2→Bus→E
;E 通过总线送 ALU
2
计算机组成原理第 10 章习题
(3)完成“STA @mem”指令所需的微操作命令及节拍安排 取指周期 T0 PC→Bus→MAR,1→R T1 M(MAR) →MDR,(PC) + 1→PC T2 MDR→Bus→IR,OP(IR) →微操作命令形成部件 间址周期 T0 Ad(IR) →Bus→MAR,1→R T1 M(MAR) →MDR 执行周期 T0 MDR→Bus→MAR,1→W T1 ACC→Bus→MDR T2 MDR→M(MAR)
操作控制
28位
判断
3位
下地址
9位
图 10.3 例 10.5 微指令格式
例 10.6 某机共有 52 个微操作控制信号,构成 5 个相斥类的微命令组,各组分别包含 5、 8、2、15、22 个微命令。已知可判定的外部条件有两个,微指令字长 28 位。
(1)按水平型微指令格式设计微指令,要求微指令的下地址字段直接给出后续微指令 地址。
#
(2)中央控制节拍包括取指阶段所有节拍和执行阶段的 T0 、T1 、T2 3 个节拍,完 成取指令和取操作数及乘法运算前的准备工作。局部控制节拍是执行阶段的 T0*和 T1*节拍, 其中 T0*为重复加操作,受 Q 寄存器末两位 Q14Q15 控制,最多执行 15 次;T1*为移位操作, 共执行 14 次。
计算机组成原理第 10 章习题
第 10 章 控制单元的设计
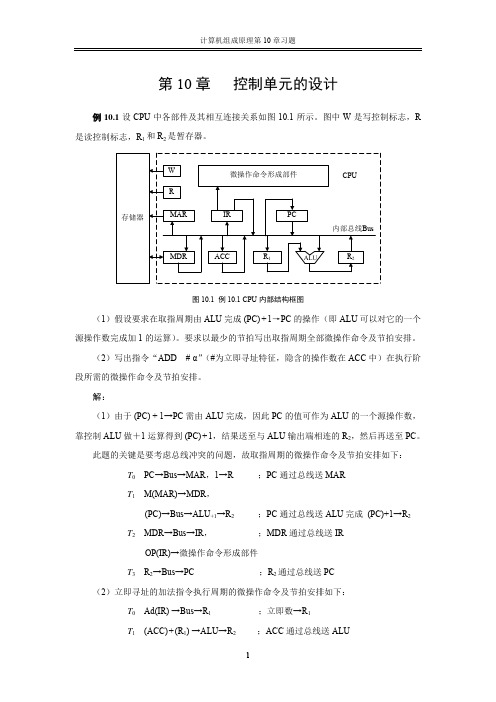
例 10.1 设 CPU 中各部件及其相互连接关系如图 10.1 所示。图中 W 是写控制标志,R 是读控制标志,R1 和 R2 是暂存器。
存储器
W R MAR
MDR
CPU设计实践教程12-Minisys-1单周期CPU简单接口的设计

assign IORead = ??? ; // 读端口
assign MemorIOtoReg = ??? ;
2021/9/5 P.6
为MiniSys-1加I/O功能(4)
修改后的控制单元仿真
2021/9/5 P.7
为MiniSys-1加I/O功能(4)
增加一个MEMorIO模块
运算 单元
wdata Address
Module的信号列表中增加input[21:0] Alu_resultHigh; 修改MemWrite信号的逻辑。 增加MemRead、IORead和IOWrite信号 改MemtoReg为MemorIOtoReg。
注意译码单元的修改
改MemtoReg为MemorIOtoReg
如果还要仿真译码单元,则仿真文件中也要修改次信号名
ioread_data = 16'b0000000000000000;
else if(ior == 1) begin
if(switchctrl == 1)
ioread_data = ioread_data_switch;
else ioread_data = ioread_data;
end
end
endmodule
0xFFFFFC62
16位数据的低8位对应RLD7~RLD0灯
2021/9/5 P.14
24位LED的设计
端口信号
module leds(led_clk, ledrst, ledwrite, ledcs, ledaddr,
ledwdata, ledout);
input led_clk; input ledrst; input ledwrite; input ledcs;
《集成电路设计(第2版)》习题答案10-12章
第11章
1. 简述VLSI 设计的一般流程和涉及的问题。 典型的设计流程被划分成三个综合阶段:高层综合、逻辑综合和物理综合。 高层综合也称行为级综合, 它是将系统的行为、 各个组成部分的功能及输入和输出, 用硬件描述语言HDL(如VHDL和Verilog)加以描述,然后进行行为级综合,同时通过高 层次硬件仿真进行验证。 逻辑综合将逻辑级行为描述转化成使用门级单元的结构描述(门级结构描述称为网 表描述),同时还要进行门级逻辑仿真和测试综合。 物理综合也称版图综合,它的任务是将门级网表自动转化成版图。这时对每个单元 确定其几何形状、大小及位置,确定单元间的连接关系。
特点: (1)RAM随机存储器又称为读写存储器,可以“随时”进行读、写操作。RAM必须保持供 电,否则其保存的信息将消失。 DRAM: DRAM单元数据必须周期性地进行读出和重写(刷新),即使存储阵列中没有存储 数据也要如此。由于DRAM 成本低、密度高,因此在PC、大型计算机和工作站中广泛用做主 存储器。 SRAM:SRAM只要不掉电,即使不刷新,数据也不会丢失。由于SARM存取速度高、功耗 低,因此主要作为微处理器、大型机、工作站以及许多便携设备的高速缓冲存储器。 (2) ROM只读存储器在正常运行中只能够对已存储的内容进行读取, 而不允许对存储 的数据进行修改。ROM存储器数据不易丢失,即使在掉电和不刷新的情况下,所存数据也会 保存完好。 掩膜ROM的数据在芯片生产时用光电掩膜写入,其电路简单,集成度高,大批量生产 时价格便宜。 在可编程ROM中, 熔丝型ROM中的数据是通过外加电流把所选熔丝烧断而写入的, 一旦写入后数据就不能再进行擦除和修改。 而EPROM、 EEPROM 中的数据分别可以通过紫外光 照射擦除和电擦除,然后重新写入。闪存(flash)与EEPROM 很相似,它所保存的数据也可通 过外加高电压来擦除,其写入速度比EEPROM更快。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
内容要点
• 硬布线控制器的设计 • 微程序控制器的设计
12.1 硬布线控制器
• 硬布线控制器是早期设计计算机的一种 方法,这种逻辑电路是一种由门电路和 触发器构成的复杂树形网络
• 硬布线控制器的优点是操作速度快 • 硬布线控制器的缺点是设计负责,调试
困,除非重新设计和物理上对它重新布 线,否则要想增加新的控制功能是不可 能的
– 一条机器指令对应一个微程序,这个微程 序是由若干条微指令序列组成的
– 从指令与微指令,程序与微程序,地址与 微地址的一一对应关系来看,前者与内存 储器有关,后者与控制存储器有关
– 执行一条指令所需要的时间被称为指令周 期,而执行一条微指令的时间被称为微指 令周期
12.2 微程序控制器
• 微指令编码
12.2 微程序控制器
• 描述一个时间内出现的一组微操作,被 称为一条微指令(Microinstruction)
• 微指令序列被称为微程序或固件 (Firmware)
• 水平型微指令的基本格式
微操作
条件 微指令地址
12.2 微程序控制器
• 微程序控制器原理框图
12.2 微程序控制器
• 机器指令与微指令的关系
指令指令字比较短而微程序长 – 水平型微指令难以掌握,而垂直型比较容易掌握
译码器
…… I M
…
……
时钟
定时器
控制器
B
…
T ……
C
12.1 硬布线控制器
• 硬布线控制器的基本原理
– 某一微操作控制信号C是指令操作码译码器输出I、 节拍电位M、节拍脉冲T和状态条件信号B的逻辑 函数,即C=f(I, M, T, B)
• 设计微操作控制信号的方法和过程是
– 根据机器指令流程图,寻找出产生同一个微操作 信号的所有条件,并与适当的节拍电位和节拍脉 冲组合,从而写出其布尔代数表达式并进行简化, 然后用门电路或可编程器件来实现
12.2 微程序控制器
• 1951年,M. V. Wilkes最先提出了微程序 (Micro Program)概念
• 微程序控制器具有规整性、灵活性、可维护 性等一系列优点
• 微程序控制的基本思想
– 仿照通常的解题程序的方法,把操作控制信号编 成所谓的“微指令”,存放到一个只读存储器里。 当机器运行时,一条又一条地读出这些微指令, 从而产生全机所需要的各种操作控制信号,使相 应部件执行所规定的操作。
– 直接表示法 – 编码表示法 – 混合表示法
• 微地址的形成方法
– 计数器方式 – 多路转移方式
12.2 微程序控制器
• 微指令格式
– 水平型微指令 – 垂直型微指令
• 两种微指令的比较
– 水平型微指令并行操作能力强,效率高,灵活性 强,垂直型微指令则较差
– 水平型微指令执行时间短,垂直型执行时间长 – 水平型微指令指令字较长而微程序短,垂直型微
12.1 硬布线控制器
• 硬布线控制器的输入
– 来自指令操作码译码器的输出I – 来自执行部件的反馈信息B – 来自时序产生器的时序信号,包括节拍电
位信号M和节拍脉冲信号T
• 硬布线控制器的输出
– 微操作控制信号C,它用来对执行部件 硬布线控制器逻辑框图
指令寄存器