松下伺服马达转差频率矢量控制系统介绍
松下伺服资料

松下伺服资料一.伺服的概念二.伺服电机与步进电机性能比较三.伺服系统的控制模式四.伺服电机编码器分类五.伺服驱动器的认识六.伺服电机的认识七.系统结构和配线八.试运转九.前面板的使用方法十.参数十一.报警代码一.伺服的概念“伺服”—词源于希腊语“奴隶”的意思。
人们想把“伺服机构”当个得心应手的驯服工具,服从控制信号的要求而动作。
在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。
由于它的“伺服”性能,因此而得名——伺服系统。
伺服是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制的非常灵活方便。
二.伺服电机与步进电机性能比较步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。
在目前国内的数字控制系统中,步进电机的应用十分广泛。
随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。
为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。
虽然两者在控制方式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。
现就二者的使用性能作一比较。
一、控制精度不同两相混合式步进电机步距角一般为 1.8°、0.9°,五相混合式步进电机步距角一般为0.72 °、0.36°。
也有一些高性能的步进电机通过细分后步距角更小。
如山洋公司(SANYO DENKI)生产的二相混合式步进电机其步距角可通过拨码开关设置为1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合式步进电机的步距角。
(推荐)松下伺服调试参数

松下A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明Pr5.28* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)Pr0.01* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制Pr0.02 设定实时自动调整调试设定 0:无效 1:标准 3:垂直轴Pr0.03 实时自动调整机器刚性设定调试设定 0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
Pr0.04 惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM 中刷新保存。
Pr0.05 指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器专用输入(高速接口)Pr0.07 指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
Pr0.09 第一指令脉冲分倍频分子需计算 1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量0.001mm时,Pr0.09=10000 Pr0.10=螺距5mm /脉冲当量0.001mm=5000 即:Pr0.09/Pr0.10=10000/5000=2/1Pr0.10 指令脉冲分倍频的分母需计算 1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
松下A系列伺服位置控制使用方法

松下A系列伺服位置控制使用方法Document number【SA80SAB-SAA9SYT-SAATC-SA6UT-SA18】松下A5系列伺服位置控制使用方法置模式(Pr r 000)-----按上下键或<键(可移动小数点)到要设定的参数——按S键进入、修改(按上升键或下降键)——按S键保持3秒——按一下M键>写入模式(EE_SEb)>再按”S”键>执行显示(EEP -)按上升键保持5秒----EEP --、EEP ---、EEP ----、--------SbRrb---Finish,结束。
三、辅助功能模式(AF_RcL):按上升或者下降键选择项目1、自动补偿调整(AF_oF1、oF2、oF3)AF_RcL>下降键>AF_oF1>S键>oF1 --持续按上升键执行。
2、试运行(JOG)持续按上升键(CW)--rERdy------<键---SrU_on---持续上升键(CCW)3、参数初始化(AF_ini)---按“S”键----ini----持续按上升键5秒 -------Finish----------结束4、前面板锁定解除(AF_unL)---按“S”键---unL--持续按上升键5秒----SbRrb----unL------、------------Finish 结束。
以上字母只是近似面板上显示的简码。
四、常见报警及其原因1、“11”---控制电源电压不足电源电压低或者驱动器故障2、“16”过载负载过重或电机电源线相序错误3、“21”编码器通讯异常编码器断线或者虚焊、漏焊、脱焊4、“24”位置偏差过大电机未按指令动作加大的值或者设为0五、接线1、主电源及编码器接线:2、大功率伺服编码器接线:3、控制端子接线:。
松下A+系列伺服电机手册(中文)
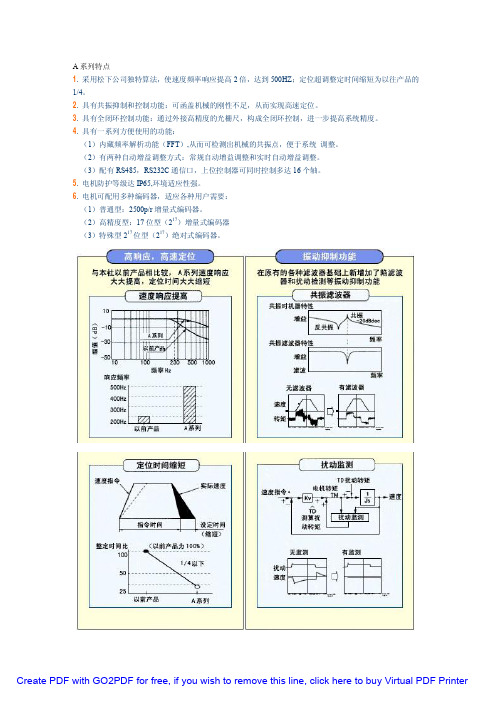
A系列特点1.采用松下公司独特算法,使速度频率响应提高2倍,达到500HZ;定位超调整定时间缩短为以往产品的1/4。
2.具有共振抑制和控制功能:可函盖机械的刚性不足,从而实现高速定位。
3.具有全闭环控制功能:通过外接高精度的光栅尺,构成全闭环控制,进一步提高系统精度。
4.具有一系列方便使用的功能:(1)内藏频率解析功能(FFT),从而可检测出机械的共振点,便于系统调整。
(2)有两种自动增益调整方式:常规自动增益调整和实时自动增益调整。
(3)配有RS485,RS232C通信口,上位控制器可同时控制多达16个轴。
5.电机防护等级达IP65,环境适应性强。
6.电机可配用多种编码器,适应各种用户需要:(1)普通型:2500p/r增量式编码器。
(2)高精度型:17位型(217)增量式编码器(3)特殊型217位型(217)绝对式编码器。
MSMA系列(小惯量)MQMA系列(小惯量)额定功率(KW)0.030.050.10.20.40.750.10.20.4额定转矩(N.M)0.0950.160.320.64 1.3 2.40.320.64 1.3最大转矩(N.M)0.280.480.95 1.91 3.87.10.95 1.91 3.82(不带制动器)0.016/0.0250.025/0.0350.062/0.0720.17/0.180.36/0.371.31/1.320.090.340.64电机惯量(×10-4kg.m2)2500p/r/17位(带制动器)0.020/0.0290.030/0.0400.066/0.0760.20/0.210.39/0.401.39/1.400.12 2.420.72额定转速rpm30003000最高转速rpm500045005000制动器DC24V电源(外备)无极性编码器2500P/R增量式、17位增量式、17位绝对式使用环境温度(使用时):0~无冰冻);(保存时):-20~无结露)湿度(使用、保存时):85%RH以下(无结露)耐振:2500P/R增量式5G以下;17位增量式2.5G以下;17位绝对式2.5G以下防护等级IP65(插头及轴端除外)LL 增量式编码器无制动器657310394123.5142.5606782增量式编码器有制动器97105135127156.5177.58499.5114.517位编码器无制动器81.589.5119.5109138.5157.5879410917位编码器有制动器113.5121.5151.5142171.5192.5111126.5141.5 LR252525303035253030 S78811141911148 LA454545707090709090 LB303030505070507070 LC383838606080608080 LD---LE333333355 LF666778788 LZ 3.5 3.4 3.4 4.5 4.56 4.5 5.5 5.5 LW13/2014/2014/2020/2225/2225/2514/2020/2225/22 LK1212.512.51822.52212.51822.5KW2h93h93h94h95h96h93h94h95h9KH233456345键RH 5.8/6.5 6.2/7.5 6.2/7.58.5/1011/12.515.5/17.56.2/7.58.5/1011/12.5增量式/17位编码器无制动器0.27/0.330.34/0.400.56/0.62 1.0/1.1 1.6/1.7 3.2/3.30.65 1.3 1.8重量(kg)增量式/17位编码器有制动器0.47/0.530.53/0.590.76/0.82 1.4/1.5 2.0/2.1 3.9/4.00.9 2.0 2.5外形图MSMA系列(小惯量)额定功率(KW)1 1.52 2.53 3.54 4.55额定转矩(N.M) 3.18 4.77 6.367.949.541112.614.315.8最大转矩(N.M)9.514.319.123.828.633.237.942.947.6 (不带制动器) 1.69 2.59 3.46 4.31 6.777.912.715.317.8电机惯量(×10-4kg.m2)2500p/r/17位(带制动器) 1.88 2.84 3.81 4.747.458.6914.11719.7额定转速rpm3000最高转速rpm50004500制动器DC24V电源(外备)无极性编码器2500P/R增量式、17位增量式、17位绝对式使用环境温度(使用时):0~无冰冻);(保存时):-20~无结露)湿度(使用、保存时):85%RH以下(无结露)耐振:5G以下防护等级IP65(必须使用防油圆柱形插头)增量式编码器无制动器172177202227214234237257277增量式编码器有制动器19720222725223925926228230217位编码器无制动器172177202227214234237257277LL17位编码器有制动器197202227252239259262282302 LR555555555555656565 S191919192222242424 LA100115115115130/145130/145145145145 LB80959595110110110110110 LC90100100100120120130130130 LD120135135135162162165165165 LE333333666 LF71010101212121212LZ 6.699999999 LW454545454545555555LK424242424141515151KW6h96h96h96h98h98h98h98h98h9KH666677777键RH15.515.515.515.51818202020增量式/17位编码器无制动器4.5 5.1 6.57.59.310.912.915.117.3重量(kg)增量式/17位编码器有制动器5.16.57.98.91112.614.81719.2外形图MDMA系列(中惯量)MGMA系列(中惯量)额定功率(KW)0.751 1.52 2.53 3.54 4.550.30.60.9 1.223 4.5额定转矩(N.M) 3.57 4.87.159.5411.814.316.618.821.423.82.845.78.6211.519.128.442.9最大转矩(N.M)10.714.421.528.535.542.95056.464.371.4 6.314.419.3284463.7107(不带制动器)2.82 6.1711.215.219.222.335.942.550.660.7 3.9 6.1711.230.435.555.780.9电机惯量(×10-4kg.m2) 2500p/r/17位(带制动器)3.13 3.7912.316.721.124.640.246.855.666.7 5.17.4512.336.241.461.786.9额定转速rpm20001000最高转速rpm30002000制动器DC24V电源(外备)无极性编码器2500P/R增量式、17位增量式/绝对式共用使用环境温度(使用时):0~无冰冻);(保存时):-20~无结露)湿度(使用、保存时):85%RH以下(无结露)耐振:5G以下防护等级IP65(必须使用防油圆柱插头)增量式编码器无制动器144147172197222247219239202222122147172162182222301增量式编码器有制动器16917219722224727224426422724714717219718727247346 17位编码器无制动器144147172197222247219239202222122147172162182222301LL17位编码器有制动器169172197222247272244264227247147172197187207247346 LR55555555656565657070707070808080113 S1922222224242828353522222235353542 LA130/145145145145145145165165200200145145145200200200200 LB110110110110110110130130114.3114.3110110110114.3114.3114.3114.3 LC120130130130130130150150176176130130130176176176176 LD162165165165165165190190233233165165165233233233233 LE366666 3.2 3.2 3.2 3.2666 3.2 3.2 3.2 3.2 LF1212121212121818181812121218181824 LZ999999111113.513.599913.513.513.513.5 LW4545454555555555555545454555555596LK4241414151515151505041414150505090KW6h98h98h98h98h98h98h98h910h910h98h98h98h910h910h910h912h9键KH67777777887778888RH15.518181820202424303018181830303037增量式/17位编码器无制动器4.8 6.88.510.612.814.616.218.821.525 5.1 6.88.515.517.52534重量(kg)增量式/17位编码器有制动器6.58.710.112.514.716.518.721.32528.5 6.78.410192128.539.5外形图MFMA系列(中惯量)MHMA系列(大惯量)额定功率(KW)0.40.75 1.5 2.5 3.5 4.50.51 1.52345额定转矩(N.M) 1.9 3.577.1511.816.621.5 2.38 4.87.159.5414.318.823.8最大转矩(N.M) 5.310.721.530.444.154.9614.421.528.542.956.471.4(不带制动器)2.4510.120.141.351.672.3142642.96294120170电机惯量(×10-4kg.m2)2500p/r/17位(带制动器)2.710.921.545.355.778.515.227.244.167.9100126176额定转速rpm20002000最高转速rpm30003000制动器DC24V电源(外备)无极性编码器2500P/R增量式、17位增量式/绝对式共用使用环境温度(使用时):0~无冰冻);(保存时):-20~无结露)湿度(使用、保存时):85%RH以下(无结露)耐振:5G以下防护等级IP65(必须使用防油圆柱插头)增量式编码器无制动器117124142136144160147172197187202227252增量式编码器有制动器142149167163171191172197222212227252277 17位编码器无制动器117124142136144160147172197187202227252LL17位编码器有制动器142149167163171191172197222212227252277 LR55556565657070707080808080 S19223535353522222235353535 LA145200200235235235145145145200200200200 LB110114.3114.3200200200110110110114.3114.3114.3114.3 LC130176176220220220130130130176176176176 LD165233233268268268165165165233233233233 LE6 3.2 3.2444666 3.2 3.2 3.2 3.2 LF12181816161612121218181818 LZ913.513.513.513.513.599913.513.513.513.5 LW45455555555545454555555555 LK42415050505041414150505050KW6h98h910h910h910h910h98h98h98h910h910h910h910h9KH6788887778888键RH15.5183030303018181830303030增量式/17位编码器无制动器4.78.61114.815.519.9 5.38.9101618.22226.7重量(kg)增量式/17位编码器有制动器6.710.61417.519.224.3 6.99.511.619.521.725.530.2外形图电机匹配驱动器驱动器特征接线图CN1/F速度控制接线图CN1/F转矩控制接线图。
松下伺服马达增益调试课件

调试
目录
• 前言 • 伺服马达参数设置方法 • 松下伺服参数自整定调试 • 松下伺服参数手动调试 • 波形仿真和实例演示
前言
前(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达
间接变速装置。伺服马达可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和
当整个系统需要很快的反应时,仅仅确保采用的伺服系统(控制器、伺服驱动器 、电机以及编码器)的快速反应是不够的,还必须要确保其控制的机械系统也具有 较高的刚性,这样才能使得整个系统具有较好的刚性。
一、伺服驱动器参数设
置方法
二、伺服驱动器关键参数的调整原则 • 速度环增益(KVP)
主要用来决定速度环的反应速度。在机械系统不震动的前提下,参数设定的值 愈大,反应速度就会增加。在确保负载惯量比的设定值处于允许范围的条件下, 速度环的增益设置就可以达到设计时允许的数值范围,从而确保速度环的快速反 应。 增大速度环的比例增益,则能降低转速脉动的变化量,提高伺服驱动系统的硬 度,保证系统稳态及瞬态运行时的性能。但是在实际系统中,速度环比例增益不 能过大,否则将引起整个伺服驱动系统振荡。
Ti:积分时间参数[s] Kv:速度环增益 [HZ]
一、伺服驱动器参数设
置方法
• 速度环参数调节与负载惯量的关系
当负载对象的转动惯量与电动机的转动惯量之比增大以及负载的摩擦转矩增大时,
宜增大速度环比例增益和积分时间常数,以满足运行稳定性的要求。当负载对象 的转动惯量与电动机的转动惯量之比减小以及负载的摩擦转矩减小时,宜减小速 度环比例增益和积分时间常数,保证低速运行时的速度控制精度。
• 速度环积分时间常数(KVI)
速度环的积分作用可以减小电机速度的脉动,但积分作用也会延迟伺服驱动器的 反应。速度环积分对速度跟踪位置指令的影响不是很大,但过大的速度环积分时 间会延迟速度环的反应时间。因此,时间常数增加时,驱动器的反应时间变慢, 从而所需的定位时间就愈长。 当负载惯量很大,或者机械系统很可能出现震动时,必须增大速度环积分时间 常数,否则机械系统将很可能出现震动。设置时可参考如下进行:
为您浅谈介绍松下伺服
为您浅谈介绍松下伺服概述松下伺服是一种高精度、高性能、高可靠性的电机控制装置。
它利用数字控制器对电机进行控制,可以实现高速、高精度的运动控制,同时还可以采用多种编码器进行反馈控制,以确保运动的准确性。
目前,松下伺服已经广泛应用于各种机械设备、自动化设备、机器人、数控机床等领域,成为了现代工业中不可或缺的一部分。
优点高精度松下伺服采用先进的数字控制技术,可以实现高精度运动控制,如位置控制、速度控制、加速度控制等。
其控制精度可以达到毫米级别甚至更高,这对于一些要求高精度运动的设备来说,是非常重要的。
高可靠性松下伺服采用了严格的质量控制标准,包括了多项关键技术和工艺。
它的结构设计经过了反复的验证和测试,可以承受较大的载荷和冲击,同时还具有很好的抗干扰能力和耐用性。
高性能松下伺服在不同工作环境下都可以发挥出较好的性能。
它可以根据不同的工作条件进行自适应控制,以实现最佳的控制效果。
此外,它还支持多种编码器反馈方式,并且可以与其他控制系统进行无缝集成,以实现更高效的控制。
应用领域工业自动化在工业自动化领域,松下伺服广泛应用于各种机械设备、机器人、自动化生产线等领域。
它可以实现高精度、高速度的运动控制,以提高生产效率和产品质量。
数控机床在数控机床领域,松下伺服被广泛应用于加工中心、车床、磨床等设备中。
它可以实现高速切削、高精度加工,以满足不同的加工需求。
机器人在机器人领域,松下伺服被广泛应用于各类工业机器人、服务机器人、医疗机器人等领域。
它可以实现高速移动、精准定位、高精度控制,以提高机器人的运动能力和作业效率。
总结松下伺服作为一种先进的电机控制装置,具有高精度、高可靠性、高性能等优点,在工业自动化、数控机床、机器人等领域被广泛应用。
未来,随着先进制造技术的不断发展,相信松下伺服将有更广阔的应用前景。
松下伺服电机)

松下伺服电机松下伺服电机是指在伺服系统中控制机械元件运转的发动机。
是一种补助马达间接变速装置。
可使控制速度,位置精度非常准确。
将电压信号转化为转矩和转速以驱动控制对象松下伺服电机分类:直流伺服电机和交流伺服电机。
Panasonic MINAS A4 SERIES 松下交流伺服A4系列的产品在市场销售很多年,现在A5产品出来了,即将取代A4系列产品,上海钜意机电科技有限公司在大力跟松下电机合作,全面负责松下电机A5,A4系列产品在中国的销售和技术服务,为中国自动化行业做出自己的贡献。
用作自动控制装置中执行元件的微特电机。
又称执行电动机。
其功能是将电信号转换成转轴的角位移或角速度。
伺服电动机分交、直流两类。
交流伺服电动机的工作原理与交流感应电动机相同。
在定子上有两个相空间位移90°电角度的励磁绕组Wf和控制绕组WcoWf接一恒定交流电压,利用施加到Wc上的交流电压或相位的变化,达到控制电动机运行的目的。
交流伺服电动机具有运行稳定、可控性好、响应快速、灵敏度高以及机械特性和调节特性的非线性度指标严格(要求分别小于10%~15%和小于15%~25%)等特点。
直流伺服电动机的工作原理与一般直流电动机相同。
电动机转速n为n=E/K1j=(Ua-IaRa)/K1j式中E为电枢反电动势;K为常数;j为每极磁通;Ua,Ia为电枢电压和电枢电流;Ra为电枢电阻。
改变Ua或改变φ,均可控制直流伺服电动机的转速,但一般采用控制电枢电压的方法。
在永磁式直流伺服电动机中,励磁绕组被永久磁铁所取代,磁通φ恒定。
直流伺服电动机具有良好的线性调节特性及快速的时间响应。
伺服电动机伺服:一词源于希腊语“奴隶”的意思。
人们想把“伺服机构”当个得心应手的驯服工具,服从控制信号的要求而动作。
在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。
由于它的“伺服”性能,因此而得名。
伺服电动机一般分为直流伺服和交流伺服.对于直流伺服马达优点:精确的速度控制,转矩速度特性很硬,原理简单、使用方便,价格优势缺点:电刷换向,速度限制,附加阻力,产生磨损微粒(对于无尘室)对于交流伺服马达优点:良好的速度控制特性,在整个速度区内可实现平滑控制,几乎无振荡;高效率,90%以上,不发热;高速控制;高精确位置控制(取决于何种编码器);额定运行区域内,实现恒力矩;低噪音;没有电刷的磨损,免维护;不产生磨损颗粒、没有火花,适用于无尘间、易暴环境惯量低;Panasonic MINAS A4 SERIES 松下全数字交流伺服系统 DIGITAL AC SERVO MOTOR & DRIVERPanasonic MINAS A4 SERIES 松下交流伺服交流伺服电机的输出功率一般为0.1-100 W,电源频率分50Hz、400Hz 等多种。
松下伺服调试说明
Panasonic松下数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 松下连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下伺服驱动器的参数设定 5. 松下伺服驱动器的参数和性能优化调整 1. 松下连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在松下的保修范围!) 2. 通电前的检查 1) 确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2)确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定 1)松下伺服驱动器修改参数的操作方法 A. 接通驱动器电源; B. 按操作面板上的“SET”键; C. 按住“MODE”键,选择参数页面 PR _ 00 ; D. 用上○∧,下○∨按钮,选择你需要修改参数的参数号码 PR _ 42 (例修改42号参数); E. 按“SET”键,显示原来的参数值 00; F. 用左○<,上○∧,下○∨按钮,改变参数值; G. 修改完毕, 按“SET”键确定。
变频、伺服、步进应用实践教程PPT课件—松下A5伺服驱动器位置控制模式相关参数

0:光电耦合输入;1:长线驱动输入;2:A5II 仅有光电耦合输入
下文详解
3
位置控制参数概述
伺服系统应用
参数
名称
初始值
功能和含义
Pr0.07 * Pr0.08 *
Pr0.09 Pr0.10
指令脉冲输入模式设定 1 下文详解
电机每旋转一转的指令 脉冲数
电子齿轮比分子(N1)
5.松下A5伺服驱动器电机每旋转一转的指令脉 冲数参数是( )
A Pr0.08 B Pr0.01 C Pr0.06 D Pr0.07
提交
单选题 2分
6.松下A5伺服驱动器电子齿轮比分子(N1)参
数是( )
A Pr0.00 B Pr0.09 C Pr0.10 D Pr0.07
提交
单选题 2分
7.松下A5伺服驱动器电子齿轮比分母(M)参
Pr0.06 Pr0.07
指令脉冲形式
信号名称
0或 2
90°相位差 2 相脉冲 (A 相+B 相)
PULS SIGN
正方向脉冲序列+ PULS
1
负方向脉冲序列
SIGN
0
脉冲列
PULS
3
+
符号
SIGN
正方向指令
B 相超前A 相 90°
负方向指令
A 相超前B相90°
9
位置控制输入脉冲形式指令 伺服系统应用
12
位置分辨率、电子齿轮、每转脉冲数伺服系统应用
每个指令脉冲的行程为:
电
L0
L
CMX CDV
子
式中,CMX:电子齿轮(指令脉冲乘数分子);
变频、伺服、步进应用实践教程PPT课件—松下 A5 伺服驱动器参数概述

单选题 2分
2.松下 A5伺服驱动器参数中从左到右,第一 个数字表示分类,1表示( )
A 基本设定 B 增益调整 C 振动抑制功能 D 速度、转矩、全闭环控制
提交
单选题 2分
3.松下 A5伺服驱动器参数中从左到右,第一 个数字表示分类,2表示( )
A 基本设定 B 增益调整 C 振动抑制功能 D 速度、转矩、全闭环控制
提交
单选题 2分
4.松下 A5伺服驱动器参数中从左到右,第一 个数字表示分类,3表示( )
A 基本设定 B 增益调整 C 振动抑制功能 D 速度、转矩、全闭环控制
提交
单选题 2分
5.松下 A5伺服驱动器参数中从左到右,第一 个数字表示分类,4表示( )
A I/F 监视器设定 B 增益调整 C 振动抑制功能 D 速度、转矩、全闭环控制
提交
谢谢大家!
24
精品资源共享课程
变频器与伺服应用技术
松下伺服驱动器参数概述
1
松下伺服驱动器参数概述 伺服系统认知
1 参数群组 2 基本设定
内容
3 增益调整 4 振动控制功能 5 速度、转矩、全闭环控制
6 I/F监视设定
7 扩展设定 8 特殊设定
2
参数群组
伺服系统认知
松下A5伺服驱动器的参数分为 5 类。参数代码 Pr 后 的第一个数字为参数分类,第二三个字符为参数。见下表。
参数 NO 分类 NO.*
0 00~17 1 00~27 2 00~23 3 00~29
4 00~44 5 00~35
00~39 6 00~57
分类名称 基本设定 增益调整 振动抑制功能 速度、转矩、全闭 环控制 I/F 监视器设定 扩展设定
松下伺服参数调整

松下伺服参数调整松下伺服电机是一种常见的直流电机,广泛应用于各种工业自动化设备中。
为了使伺服电机能够更好地满足实际应用需求,需要调整一些参数。
本文将从速度参数、位置参数和力矩参数三个方面介绍松下伺服电机的参数调整方法。
一、速度参数调整速度参数调整是指调整伺服电机的速度响应特性,包括速度环比例增益、速度环积分时间常数和速度环微分时间常数等。
1.速度环比例增益(Kp):比例增益决定了速度环对速度误差的响应程度,增大比例增益能够提高速度响应速度,但过大的值会导致系统震荡。
在实际应用中,可以通过试错法来逐步调整比例增益,找到一个使速度响应稳定的值。
2.速度环积分时间常数(Ti):积分时间常数决定了速度环对积分误差的积累程度,增大积分时间常数可以降低速度误差,但过大的值会导致系统响应速度变慢。
一般情况下,可以根据实际应用需求逐步调整积分时间常数,找到一个使速度响应和稳定性达到最佳的值。
3.速度环微分时间常数(Td):微分时间常数决定了速度环对速度误差变化率的响应程度,增大微分时间常数可以提高系统对速度误差变化的敏感性,但过大的值会导致系统震荡。
可以通过试错法逐步调整微分时间常数,找到一个使速度响应和稳定性达到最佳的值。
二、位置参数调整位置参数调整是指调整伺服电机的位置响应特性,包括位置环比例增益、位置环积分时间常数和位置环微分时间常数等。
1.位置环比例增益(Kp):比例增益决定了位置环对位置误差的响应程度,增大比例增益可以提高位置响应速度,但过大的值会导致系统震荡。
可以通过试错法逐步调整比例增益,找到一个使位置响应速度和稳定性达到最佳的值。
2.位置环积分时间常数(Ti):积分时间常数决定了位置环对积分误差的积累程度,增大积分时间常数可以降低位置误差,但过大的值会导致系统响应速度变慢。
根据实际需求逐步调整积分时间常数,找到一个使位置响应和稳定性达到最佳的值。
3.位置环微分时间常数(Td):微分时间常数决定了位置环对位置误差变化率的响应程度,增大微分时间常数可以提高系统对位置误差变化的敏感性,但过大的值会导致系统震荡。
松下伺服资料
松下伺服资料一.伺服的概念二.伺服电机与步进电机性能比较三.伺服系统的控制模式四.伺服电机编码器分类五.伺服驱动器的认识六.伺服电机的认识七.系统结构和配线八.试运转九.前面板的使用方法十.参数十一.报警代码一.伺服的概念“伺服”—词源于希腊语“奴隶”的意思。
人们想把“伺服机构”当个得心应手的驯服工具,服从控制信号的要求而动作。
在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。
由于它的“伺服”性能,因此而得名——伺服系统。
伺服是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
它的主要任务是按控制命令的要求、对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制的非常灵活方便。
二.伺服电机与步进电机性能比较步进电机作为一种开环控制的系统,和现代数字控制技术有着本质的联系。
在目前国内的数字控制系统中,步进电机的应用十分广泛。
随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。
为了适应数字控制的发展趋势,运动控制系统中大多采用步进电机或全数字式交流伺服电机作为执行电动机。
虽然两者在控制方式上相似(脉冲串和方向信号),但在使用性能和应用场合上存在着较大的差异。
现就二者的使用性能作一比较。
一、控制精度不同两相混合式步进电机步距角一般为 1.8°、0.9°,五相混合式步进电机步距角一般为0.72 °、0.36°。
也有一些高性能的步进电机通过细分后步距角更小。
如山洋公司(SANYO DENKI)生产的二相混合式步进电机其步距角可通过拨码开关设置为1.8°、0.9°、0.72°、0.36°、0.18°、0.09°、0.072°、0.036°,兼容了两相和五相混合式步进电机的步距角。
Panasonic伺服参数设定说明

Panasonic伺服参数设定说明Panasonic(MINAS A系列)伺服參數設定說明:备注: 1、首先设置驱动器的电子齿轮比和需要马达转一圈回授的脉冲数计算方法如下:MSMA042A1A通常新代控制器所设精度单位1um/Pules (可在系统参数17中设所需精度单位)通常新代控制器所设的倍频数是4 倍(可在系统参数81~100中所设轴卡的倍频)计算公式:F= f ×(Pr 46 ×2Pr 4A) /Pr 4B = 10000或(217)注: F —电机转一圈所需的内部指令脉冲数(编码器的分辨率)f —电机转一圈所需指令脉冲数马达转一圈回授的脉冲数= 负载转一圈移动量脉冲数÷控制器内部所设的倍频4****** ex:******当螺杆的节距是10mm,马达选用A 型编码器分辨率,采用直传连轴器那齿轮比计算如下:负载转一圈移动量脉冲数= 10mm÷1um/Pules =104 PulesM / N = 1 / 1F(10000) = f(10000) ×{ Pr 46 ×2Pr 4A) ÷Pr 4B把Pr 4A = 0 1、Pr 46 = 10000 2、Pr 4B = 100002、设定上表中的驱动器参数,值为后面的设定值;Pr 4A、Pr 46、Pr 4B为上面公式根据实际情况计算出来的值;Pr 10、Pr 11、Pr 12先不修改数值,为出厂值;3、调整机台的刚性,先进行X、Y、Z 轴的来回运动,通过自动整定调谐驱动器参数值,按加1数值增大;通常调节到机台出现震动或有声音后,降回原一级。
注意一点:调完后,需把X、Y、Z的位置增益Pr 10设成一样大;注意:齿轮比设错,编码器会无回授,同时控制器发遗失位置命令、严重追随误差警报。
使用面板设定参数的方式:1、接通驱动器电源;2、按set键按钮;3、按住MODE键按钮,到显示为:“PA_ 00”;4、按上↑、或下↓键按钮,来选择需要设定的数号,如选择10号参数,显示为:“PA_ 10”;5、按set键按钮,进入对应参数值,显示为:“50”;6、用左←键、上↑键、下↓键,来修改设定数值;7、修改完后,按set键按钮,确认退出;当修改完所有要修改的参数后,要执行选择EEPROM模式写入,8、按MODE键按钮,到显示为:“EE_ SET”;9、按set键按钮,到显示为:“EEP -”;10、按住上↑键按钮约(持续3秒钟),显示转换如下:“EEP -”→“EEP - -”→“- - - - - -”→“START”[→“FINISH”[→“Reset”[→“ERROR”“FINISH”与“Reset”写入完成;“ERROR”写入出错,须重新设定参数,后再写入;显示“Reset”需要关电源,重开电源后,设定参数值生效;常规自动增益调节:1、选择常规自动增益调节模式,初始显示“r 0”;2、按SET键按钮一次,按MODE模式键切换,按钮三次,到显示为“At_no 1”;3、按上↑、下↓键来选择机器的刚性,刚性越高越好,但前提条件是机台不抖动;4、按SET键按钮,进入监视器/ 执行模式;显示为:“Atu -”;5、在监视器/ 执行模式上运作:按住上↑键按钮约3秒,直到出现显示“start”,电机开始运转,大约15秒内,电机重复5个周期,包括两圈的正转和反转。
松下伺服系统的原理
松下伺服系统的原理松下伺服系统是一种控制系统,用于控制电机或执行器的运动。
其原理是通过测量和比较输入信号和实际输出信号,以实现所需的运动控制。
伺服系统的核心组成部分是伺服电机和伺服驱动器。
伺服电机是一种特殊的电动机,它具有高速响应和高精度的特点。
伺服驱动器则负责将控制信号转换为电机所需的电压和电流。
伺服系统的工作原理如下:1. 反馈传感器:伺服系统中的反馈传感器用于测量实际输出信号,如电机位置、速度或力量。
常见的反馈传感器包括编码器、霍尔电流传感器等。
反馈传感器将测量的信号发送给伺服驱动器,以便进行控制。
2. 控制器:伺服系统的控制器通常由一台计算机或专用的控制器组成。
控制器接收来自用户输入的指令,并将其转化为适合控制伺服驱动器的信号。
控制器的主要任务是比较反馈传感器的测量信号和用户输入的指令信号,并生成误差信号。
3. 误差计算:控制器通过将反馈传感器的测量信号与用户输入的指令信号进行比较,计算出误差信号。
误差信号表示实际输出与期望输出之间的偏差。
4. 调整控制信号:控制器根据误差信号调整控制信号,使实际输出尽可能接近期望输出。
控制信号包括电压和电流信号,用于控制伺服驱动器的输出。
5. 伺服驱动器:伺服驱动器是伺服系统中的关键部件,负责将控制信号转换为电机所需的电压和电流。
伺服驱动器通过控制电机的输入功率来控制电机的转速、力量和位置等参数。
6. 反馈控制:伺服系统通过不断进行反馈控制来保持输出的稳定。
伺服驱动器将实际输出信号发送回控制器,以反馈给控制算法。
根据反馈信号,控制器可以调整控制信号,使输出尽可能接近期望输出。
总的来说,松下伺服系统的原理是通过使用反馈传感器来测量实际输出信号,并将其与期望输出进行比较,然后调整控制信号以控制伺服驱动器的输出。
这种反馈控制的方法可以实现高精度和高速响应的运动控制。
松下伺服系统广泛应用于各种工业自动化领域,如机器人、加工设备、印刷机械等。
松下伺服电机控制器参数设置

松下伺服电机控制器参数设置
松下的伺服电机控制器使⽤之前需要对齐进⾏参数设置,具体设置步骤如下所⽰:
下表是必须设置的参数
参数值定义调整⽅法
Pr0.010控制模式设置,0为位置式默认0,不⽤修改
是否⾃动调节
Pr0.020
这⾥设置0即可
1:⾃动调节 0:不⾃动
Pr0.0310~16设置机台刚性从低到⾼调节,震动减⼩
脉冲输⼊⽅式
Pr0.050
需要⾼速控制时设置为1,这⾥我们使⽤常速就可以,即设置为0
1:4Mbps(长线) 0:500kbps(光电)
Pr0.060设置指令脉冲极性默认为0,⽆需修改
设置脉冲输⼊模式
Pr0.073
这⾥必须设置为3,因为我们使⽤的控制指令是脉冲和⽅向控制
3:脉冲+⽅向
设置参数⾯板操作步骤:
下⾯以Pr0.02参数设置为例
⾯板实物图
M:模式选择键 S:设置键 <:左移键 ^:增加键 V:减⼩键
设置参数
1上电之后如下:
2按S键,然后按M键后如下所⽰:
此时显⽰的是Pr0.00参数。
3按^增加键,按两下,如图所⽰
此时显⽰的是Pr0.02参数
4按S键,进⼊值设置界⾯,如下:
通过^键增加或者V键减⼩来设置其值,这⾥设置为0即可
5长按S键,如图所⽰:
此时返回参数选项
6重复上⾯的操作,设置所有的参数。
保存设置
7按下M键,然后按下S键,最后长按^增加键不放,直到保存成功为⽌。
如下图所⽰
按下M键 -> 按下S键 -> 长按^键 -> 保存成功注意:设置好后需要断电重新上电,设置才⽣效。
松下伺服马达调节

松下伺服马达调节
有以下五种模式:监视模式(dp5-pd).参数设定模式(PR-00),写入模式(EE-5EL),自动增益模式(RL-no1),辅助功能模式(RF-RcL)松下伺服马达一般调节:马达方向,机械刚性
1.X马达方向调节
在伺服驱动器显示中,选择MODE,点按钮两下,切换到PR-00参数设定模式,然后在按SET键,通过按︿向上箭头移动把数字0改为1,继续按﹤向左方向键移动小数点到要改变的位数,按︿向上箭头移动把数字0改为4,在按SET键后显示如果是1将通过﹀下键改为0,“(上键是增加数值,下键减少数值)”。
也就是说41是脉冲方向指令将它的设定值改为0就是修改方向移动。
修改后的数据要保存才可以用,所以将在EEPROM写入模式下操作保存修改后的数据,将模式转换到“EE-5EL,按SET键,切换到”EEP-“在按住向上键约5秒,显示为FINSH将写入完成,如果显示ERROR 表明发生错误,没有写入成功。
最后将电箱电源关闭重新打开,(电源关闭后,要约10秒后在打开电源,”因为驱动器电荷大要放电“起到保护作用)操作完成。
(Y轴伺服马达方向和以上操作步骤一样,只将41的高定数值改为1就操作完成)
2.机械几刚性
X与Y轴操作方法一样,显示模式中转换到自动增益模式下,通过按MODE键三下,在按SET键显示出现“RLU –NO1”按上下键来增加减少NO1机械刚性的值,后在按SET键转换到“RLU-”,按向
上键约5秒,直到显示FINSH操作成。
松下伺服驱动器工作原理及控制方式

松下伺服驱动器⼯作原理及控制⽅式松下伺服驱动器⼯作原理为了使松下伺服驱动器具有⽐较宽的调速范围、线性的机械特性,⽆“⾃转”现象和快速响应的性能,它与普通电动机相⽐,应具有转⼦电阻⼤和转动惯量⼩这两个特点。
⽬前应⽤较多的转⼦结构有两种形式:⼀种是采⽤⾼电阻率的导电材料做成的⾼电阻率导条的⿏笼转⼦,为了减⼩转⼦的转动惯量,转⼦做得细长;另⼀种是采⽤铝合⾦制成的空⼼杯形转⼦,杯壁很薄,仅0.2-0.3mm,为了减⼩磁路的磁阻,要在空⼼杯形转⼦内放置固定的内定⼦。
空⼼杯形转⼦的转动惯量⾮常⼩,反应很迅速,⽽且运转平稳,因此被⼴泛采⽤。
伺服电机是⼀个典型闭环反馈系统,减速齿轮组由电机驱动,其终端(输出端)带动⼀个线性的⽐例电位器作位置检测,该电位器把转⾓坐标转换为⼀⽐例电压反馈给控制线路板,控制线路板将其与输⼊的控制脉冲信号⽐较,产⽣纠正脉冲,并驱动电机正向或反向地转动,使齿轮组的输出位置与期望值相符,令纠正脉冲趋于为0,从⽽达到使伺服电机精确定位的⽬的。
:伺服系统:松下伺服驱动器伺服系统松下伺服驱动器是使物体的位置、⽅位、状态等输出被控量能够跟随输⼊⽬标(或给定值)的任意变化的⾃动控制系统。
伺服的主要任务是按控制命令的要求、对功率进⾏放⼤、变换与调控等处理,使驱动装置输出的⼒矩、速度和位置控制的⾮常灵活⽅便。
交流伺服电动机定⼦的构造基本上与电容分相式单相异步电动机相似.其定⼦上装有两个位置互差90°的绕组,⼀个是励磁绕组Rf,它始终接在交流电压Uf上;另⼀个是控制绕组L,联接控制信号电压Uc。
所以交流伺服电动机⼜称两个伺服电动机。
伺服驱动器的稳定性是指当作⽤在系统上的⼲扰消失以后,系统能够恢复到原来稳定状态的能⼒,或者是当给系统⼀个新的输⼊指令之后,系统达到新的稳定运⾏状态的能⼒。
伺服系统在承受额定⼒矩的变化的时候,静态速降应⼩于百分之5,动态速降应⼩于百分之10。
松下伺服驱动器控制⽅式:⼀般伺服都有三种控制⽅式:速度控制⽅式,转矩控制⽅式,位置控制⽅式。
松下伺服增益参数调整说明 PPT
速度环增益(Speed loop gain)的效果:速度(speed)观测
速度环增益(speed loop gain)的效果:转矩(torque)观测
位置环增益的设定
与定位的迟滞有关,一般在速度增益的一半到2倍的范围内进行设定。 目标? 高刚性的机械 位置环增益设定= 速度环增益×2 低刚性的机械 位置环增益设定= 速度环增益×1/2 (如果负载的惯量比设定正确的情况) 由于设定的大、小产生的影响? 太小的话,定位时间长。 太大的话,发生振动,也会影响COIN信号输出。
共振点
截止频率: 关键点为驱动器控制速度环响应。
设定惯量比时,要与速度环增益一 致。 这里以110Hz为例,速度环的响 应区间 表示设定在110Hz的状态下。
反共振点
如果使用此项功 能,解析力将大 幅提高
・使用PANATERM分析频率功能,观察滤波器效果
下图的蓝线(黑白印刷比较图难以辨认)表示使用滤波器前,可能在200Hz付近共振点的振动状态。 红线表示使用滤波器后的波形,可以把握各滤波器的效果。
转矩滤波器
整体下降
陷波滤波器
该点下降
增益调整的实际运用
最后,总结了使用操作手册在实机上进行调整的实际操作。 此前,对增益进行了阐述。实际操作的调整,要和各种过滤器一起来抑制共振现象。此外,归根结底调整是与负载 匹配的过程。根据不同情况,改变调整方法,整体流程如下图所示。
开始
用出货值解析频率, 确认共振点等,然后设定各过滤器
④为了加快响应而提高增益
⑤产生控制体自身的振动(增益已不能再提高)
按照以上的步骤执行。
是
结 束
运转 OK?
机械钢性No.(Pr.22)下降
运转 OK?
松下A6伺服电机说明书Part3

在使用之前2准备4设定5调整6出现问题时7资料3-13-2概 要根据从上位控制器输入的位置指令(脉冲列)进行位置控制。
以下针对位置控制时的基本设定进行说明。
功 能①指令脉冲输入处理位置指令(脉冲列)对应有以下三种形态的输入。
・2相脉冲・正方向脉冲/负方向脉冲・脉冲列+符号根据上位控制器的规格和装置设置的情况,设定脉冲形态和脉冲计数的方式。
此外,输入端子为2系统的对应。
・输入1「PULSH1,.PULSH2,.SIGNH1,.SIGNH2」长线驱动输入(8.Mpps)・输入2「PULS1,.PULS2,.SIGN1,.SIGN2」光电耦合器输入(500.kpps)长线驱动输出时,「输入2」也可以使用,但容许输入频率不变。
●关联参数以上参数的详情,请参照P.4-8,.9「参数的详情」。
3-31在使用之前2准 备4设 定5调 整6出现问题时7资 料②电子齿轮功能具有将上位控制器输入的脉冲指令与已设定的分倍频的比相乘的值作为位置控制部的位置指令的功能。
通过此功能,可任意设定单位输入指令脉冲的电机旋转・移动量,由于上位控制器的脉冲输出能力的限制,电机达不到所要的速度时,可以增大指令脉冲频率。
●关联参数上述参数的详情请参照P.4-10,11「参数详情」。
③位置指令滤波器功能想使分倍频(电子齿轮)后的位置指令平滑时,需要设定指令滤波器。
●关联参数上述参数的详情请参照P.4-26〜4-27「参数详情」。
3-4④脉冲再生功能可从伺服驱动器中将移动量用AB相脉冲方式传送到上位控制器。
此外,输出源为编码器时,Z相信号为电机每旋转1次输出一次,输出源为外部位移传感器时,绝对位置为零的情况下输出。
此时的输出分辨率以及B相逻辑、输出源(编码器、外部位移传感器)可用参数进行设定。
●关联参数上述参数的详情请参照P.4-11,.13,.47,.55,.59「参数详情」⑤偏差计数器清除功能此功能为,通过偏差计数器清除输入(CL),将位置控制的位置偏差计数器的值清零。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
松下伺服马达转差频率矢量控制系统介
绍
松下伺服马达转差频率矢量控制系统介绍
松下伺服马达稳态运行时存在转差率,而转差率对松下伺服马达的性能有很大的影响,转差率越小,效率越高,控制松下伺服马达转差率或转子的转差频率就能高效率地控制松下伺服马达。
转差频率矢量控制系统是对传统矢量控制系统的简化,人们采用忽略转子磁链幅值的动态变化的方法,认为转子磁链是稳定的,这样在转子磁场定向坐标系统中,可以确定定子电流的直轴分量,而交轴量可以由电磁转矩表达式确定。
因为当转差率很小时,电磁转矩与转差率成正比关系。
当松下伺服马达进行调速控制时。
利用给定速度信号与实际速度值的差,由速度调节器确定松下伺服马达的电磁转矩及相应的转差率,进一步可知转差频率的大小,只要控制转差频率就可以很好的控制松下伺服马达调速。
这类简单、高效的调速系统在节能的风力机、泵类负载中应用得相当广泛。
1。