Arduino 颜色传感器
颜色传感器工作原理

颜色传感器工作原理
颜色传感器是一种能够识别对象颜色的传感器,它通过感知光线的颜色来判断物体的颜色。
其工作原理是利用光电效应和滤波技术。
光电效应是指当光线照射到物质表面时,电子会从物质表面释放出来。
颜色传感器中通常使用的光电效应是光电二极管效应。
当光照到光电二极管上时,光子的能量被电子吸收,从而使光电二极管中的电流发生变化。
颜色传感器还采用了滤波技术,通过使用不同的滤光片来选择特定的波长范围。
不同颜色的光波长度不同,因此使用不同的滤光片可以使传感器只接收特定颜色的光波。
当物体放置在颜色传感器前时,它会发出光波,传感器接收到这些光波后,会根据光波的特性来判断物体的颜色。
通过测量光电二极管上的电流变化,并结合滤光片的选择,传感器能够准确地识别出物体的颜色。
除了识别颜色外,颜色传感器还可以测量光的强度和光的频率,从而进一步判断物体的特性。
通过与其他传感器或控制系统相连,颜色传感器可以在自动化控制系统中应用于颜色检测、分类等领域。
综上所述,颜色传感器利用光电效应和滤波技术,通过感知光线的颜色来判断物体的颜色。
它是一种重要的传感器,广泛应用于自动控制系统中。
arduino 霍尔传感器计数

Arduino 结合霍尔传感器可以实现对磁场变化的检测,常用于计数器、速度监测等应用。
以下是一个基于Arduino和霍尔传感器的简单计数器示例:### 所需材料- Arduino板(如Arduino UNO)-霍尔传感器模块-跳线-电阻-电容-面包板或其他焊接支架### 霍尔传感器接线- VCC接Arduino的5V输出- GND接Arduino的GND- DO(数字输出)接Arduino的一个数字输入引脚(例如PB1)### 代码示例```cpp// 定义霍尔传感器的引脚const int hallSensorPin = 2; // 假设DO接在PB1// 用于计数变量int count = 0;void setup() {// 初始化串口通信Serial.begin(9600);// 将霍尔传感器的引脚设置为输入模式pinMode(hallSensorPin, INPUT);}void loop() {// 读取霍尔传感器的状态int sensorValue = digitalRead(hallSensorPin);// 如果传感器检测到磁场变化if (sensorValue == HIGH) {// 增加计数count++;// 输出计数结果Serial.print("Count: ");Serial.println(count);}// 延时一段时间,减少CPU占用delay(100);}```### 工作原理在这个示例中,霍尔传感器被配置为数字输入模式。
每当磁场变化导致传感器输出从低到高(或从高到低),Arduino就会检测到一个脉冲,并增加计数器的值。
通过串口监视器或其他方式可以实时看到计数结果。
### 注意事项-确保霍尔传感器的VCC和GND与Arduino相应引脚正确连接。
-根据霍尔传感器的具体型号和引脚定义,调整代码中的`hallSensorPin`定义。
-这段代码仅作为一个基本示例,实际应用中可能需要根据具体情况进行调整。
Arduino传感器详解与应用

• void setup()
• { pinMode(buzzer,OUTPUT);//设置数字IO脚模式,OUTPUT为辒出
•}
• void loop()
• { unsigned char i,j; //定义变量
• for(i=0;i<100;i++) //输出一个频率的声音
• { digitalWrite(buzzer,HIGH); //发声音
1、按钮开关
信号线S 5V
GND
开关例程
• 按键开关模块和数字13 接口自带LED 搭建简单电 路,制作按键提示灯
• 利用数字13 接口自带的LED,将按键开关传感器 接入数字3接口,当按键开关传感器感测到有按键 信号时,LED 亮,反之则灭.
• int Led=13; //定义LED 接口
• int buttonpin=3; //定义按键开关传感器接口
• int Led=13;//定义LED 接口 • int Shock=3//定义震动传感器接口 • int val;//定义数字变量val • void setup() •{ • pinMode(Led,OUTPUT); //定义LED 为输出接口 • pinMode(Shock,INPUT);//定义震动传感器为输出接口 •} • void loop() •{ • val=digitalRead(Shock);//将数字接口3的值读取赋给val • if(val==HIGH)//当震动传感器检测有信号时,LED 闪烁 •{ • digitalWrite(Led,LOW); •} • else •{ • digitalWrite(Led,HIGH); •} •}
7、水银开关传感器
• 用于检测稍微大的角度,可以用于检测跌倒等。程序和上个 例程通用
Arduino小车巡线程序的灰度阈值优化方案

Arduino小车巡线程序的灰度阈值优化方案Arduino小车巡线程序是一种常见的机器人控制程序,它通过使用红外传感器来感知地面上的黑线,从而实现自动巡线。
而灰度阈值的优化是影响小车巡线性能的重要因素之一。
本文将为大家介绍关于Arduino小车巡线程序灰度阈值优化的方案,希望能帮助大家提高小车巡线的稳定性和精度。
一、灰度阈值的意义在小车巡线程序中,灰度阈值的作用是将传感器感知到的地面颜色转化为数字信号,从而进行判断和控制小车的行驶方向。
传感器感知到的地面颜色会随着光线、环境等因素而发生变化,因此需要对这些颜色进行数字化处理,以便进行后续的控制操作。
而灰度阈值就是用来将传感器感知到的地面颜色转化为数字信号的关键参数。
二、灰度阈值的优化方法1. 确定地面颜色范围在进行灰度阈值的优化之前,首先需要确定地面颜色的范围。
可以利用示波器或者串口调试助手等工具,将传感器感知到的地面颜色进行实时监测和采集,以确定地面颜色的范围。
通过对采集到的数据进行分析,可以得到地面颜色的特征范围,从而确定合适的灰度阈值范围。
2. 调试灰度阈值参数在确定了地面颜色的范围之后,就可以进行灰度阈值参数的调试工作了。
首先需要设置一个默认的灰度阈值参数,然后将小车放置在巡线轨道上进行实验。
观察小车的行驶情况,如果小车出现频繁的偏离轨道,就需要对灰度阈值参数进行调试。
可以通过逐步增加或减小灰度阈值参数的数值来观察小车的行驶情况,直到找到最佳的灰度阈值参数为止。
3. 考虑环境因素在进行灰度阈值优化的过程中,还需要考虑环境因素对地面颜色的影响。
光线的强弱、地面的清洁程度、地面的颜色均匀度等因素都会对地面颜色的感知产生影响。
在确定灰度阈值范围和调试灰度阈值参数时,需要考虑这些环境因素的影响,并对巡线程序进行动态调整和优化。
三、实例分析为了更好地演示灰度阈值的优化过程,这里给出一个实例分析。
假设小车巡线程序中使用的地面颜色范围为30-100之间,初始灰度阈值参数设置为60。
颜色传感器的使用

注意: 1.程序开始前应先测量不同物体反射光强度值 2.小车速度与程序停止时间的关系
程序图
小车前行 检测到白线 小车停止
Байду номын сангаас
反射光强度模式扩展作业:
设置机器人折返跑比赛。
环境光强度模式——通过调节外界的光线亮度控制小
车的行驶速度
在环境光强度模式中,该颜色传感器测量从周围环境进入到 窗口的光强度,例如太阳光或者手电筒的光束。该传感器测量范 围从0(极暗)到100(极亮)。这就意味着可以通过对机器 人编程,使机器人在感应到不同环境光强度时进行不同的操作。
颜色模式扩 展作业:
程 序 图
红色停止
黄灯设置 为左转或者 右转。
绿色功率30前行
黄色功率10前行
反射光强度模式——悬崖勒马
在反射光强度模式中,颜色传感器测量从红灯(发光灯)反射回来的 光强度。该传感器测量范围从0(极暗)到100(极亮)。这就意味着 可以通过对机器人编程,使其在一个颜色表面上移动,直到检测到其他的 颜色后停止或者解释颜色编码识别卡。
程 序 图
环境光强 度模式扩展作 业: 设置机器 人处于黑暗状 态时发出声音, 处于光亮状态 时安静。
通过控制环境光强弱调节小车行进速度
注意事项:
1.当处于颜色传感器模式和反射光强度模式时,为了 更精确,传感器必须角度正确、靠近但不接触到正在 检测的物体表面。 2.在机器人行进过程当中用到颜色传感器时,应考虑 到由于小车惯性造成的误差。
颜色传感器的使用
颜色传感器是一种数字传感器,它可以检测到进入
传感器表面小窗口的颜色或光强度。
颜 色 传 感 器 的 三 种 模 式
颜色模式:
反射光强度模式:
环境光强度模式:
颜色传感器原理
颜色传感器原理颜色传感器是一种能够感知和识别物体颜色的传感器设备。
它基于光学原理工作,利用特定的光谱范围内的光线与物体相互作用后的反射、透射或吸收等特性,通过测量光线的强度和频率来获取物体的颜色信息。
颜色传感器被广泛应用于自动化控制、色彩测量、图像处理等领域。
颜色传感器通常由光源、光学透镜、滤光片、光敏元件、信号处理电路和输出接口等组成。
其工作原理可主要分为三个步骤:光源发出特定光线、物体与光线相互作用、光敏元件接收并转化为电信号。
首先,光源发出特定光线。
光源通常是一个LED灯,发射的光线需要在特定的光谱范围内,可以是红色、绿色、蓝色或其他颜色。
颜色传感器通常采用多个LED灯,以便在不同光谱范围内对物体进行测量。
其次,光线与物体相互作用。
当发射出的光线照射到物体表面时,会发生反射、透射或吸收等现象。
物体的颜色取决于其对特定光谱范围内光线的吸收和反射特性。
不同颜色的物体对不同光谱范围的光线具有不同的吸收和反射能力,这种差异可以通过颜色传感器来感知和测量。
然后,光敏元件接收并转化为电信号。
颜色传感器中的光敏元件通常是光敏二极管(photodiode),它可以将照射到其表面的光线转化为电信号。
光敏二极管在不同光谱范围内具有不同的敏感度,因此需要搭配相应的滤光片来选取特定光谱范围的信号。
滤光片能够选择性地透过或吸收某些光线,从而使光敏元件只接收到特定的光线信号,提高颜色传感器的信噪比和准确性。
最后,通过信号处理电路和输出接口,颜色传感器将转换后的电信号进行放大、滤波、计算等处理,得到物体的颜色信息,并将结果输出给外部设备进行进一步处理或控制。
输出接口通常是数字接口(如I2C、SPI)或模拟电压信号,可以与微控制器、计算机或其他设备连接。
值得注意的是,由于颜色传感器的测量结果受到外部环境光影响,所以在实际应用中通常需要进行环境校正或使用特殊的算法进行补偿处理,以提高测量的准确性和稳定性。
综上所述,颜色传感器利用特定光谱范围内光线与物体相互作用的原理,通过测量光线的强度和频率,实现对物体颜色的感知和识别。
Arduino小车巡线程序的灰度阈值优化方案

Arduino小车巡线程序的灰度阈值优化方案Arduino小车巡线程序是一种常见的机器人控制程序,通过传感器获取地面的黑白线条信息,从而实现小车沿着线条行驶的功能。
而灰度阈值是影响小车巡线性能的关键因素之一。
本文将提出一份关于Arduino小车巡线程序灰度阈值优化方案的详细内容。
一、灰度传感器介绍在Arduino小车巡线程序中,通常会使用灰度传感器来检测地面黑白线条的信息。
灰度传感器可以检测光线的强弱,从而判断地面的颜色。
对于黑白线条,可以通过灰度传感器得到反射光线的强度,从而区分黑色和白色。
一般来说,灰度传感器的输出值范围在0-1023之间,0代表最暗,1023代表最亮。
二、灰度阈值的意义灰度阈值是指在小车巡线程序中,用来区分黑线和白线的一个数值。
通过调整灰度阈值,可以使小车更准确地识别黑白线条,从而更稳定地行驶。
灰度阈值的选择对小车的巡线性能具有至关重要的影响。
三、灰度阈值的优化方案1.手动调试最直接的方法是通过手动调试的方式,将小车放置在不同地面的黑白线条上,观察灰度传感器的输出数值。
然后根据实际情况,调整灰度阈值,使小车能够准确地识别黑白线条。
这种方法比较耗时,但可以得到比较准确的结果。
2.自动优化除了手动调试之外,也可以利用算法来实现灰度阈值的自动优化。
可以通过编写程序,让小车在巡线时自动记录下黑白线条的灰度数值,并根据这些数据来动态调整灰度阈值。
这样可以实现灰度阈值的自适应优化,提高小车的巡线稳定性。
3.环境适应性在灰度阈值的优化过程中,还需要考虑到环境的适应性。
因为在不同光照条件下,地面的反射光线强度会发生变化,这会影响灰度传感器的输出。
需要在不同环境下对灰度阈值进行优化,并制定相应的灰度阈值调整策略,以保证小车在不同环境下都能稳定巡线。
四、实际案例为了验证以上灰度阈值优化方案的有效性,可以通过实际案例来进行测试。
在实际操作中,可以使用Arduino开发板、灰度传感器和小车底盘等硬件设备,通过编写相应的程序来实现灰度阈值的优化。
arduino毕业设计题目较容易的
arduino毕业设计题目较容易的
1. 温湿度监测和报警系统:使用Arduino传感器模块和LCD 显示屏,实时监测环境的温度和湿度,并在超出设定范围时发出警报。
2. 智能家居控制系统:利用Arduino和无线通信模块设计一个智能家居控制系统,包括控制灯光、窗帘、温度等各种设备,实现远程控制和自动化管理。
3. 植物生长监测系统:设计一个Arduino基于植物生长环境监测系统,包括土壤湿度、光照强度和温度等参数的监测,并通过手机App或电脑界面进行实时监控和控制。
4. 智能停车系统:利用Arduino和超声波传感器设计一个智能停车系统,帮助驾驶员找到最适合停车的位置,并通过显示屏提供实时指引。
5. 智能垃圾分类箱:利用Arduino和颜色传感器设计一个智能垃圾分类箱,可以自动识别并分辨垃圾的类别,并将其放入相应的分类箱中。
6. 无人机避障导航系统:利用Arduino和超声波/红外传感器设计一个自动避障的无人机导航系统,使无人机能够在遇到障碍物时自动躲避。
7. 智能无线充电器:设计一个使用Arduino和无线充电技术的智能无线充电器,可以实现多设备同时充电并提供智能管理功
能。
8. 智能健康监测系统:利用Arduino和心率/血压传感器设计一个智能健康监测系统,可以实时监测用户的心率、血压等参数,并通过手机App提供相应的健康建议。
这些都是相对较容易和实用的Arduino毕业设计题目,当然具体的题目还需要根据你的兴趣和实践能力进行选择。
Arduino 传感器扩展板的使用

传感器扩展板的使用
概述
在面包板上接插元件固然方便,但你需要有一定的电子知识来搭建各种电路。
而使用传感器扩展板,你只需要用通过连接线,把各种接插到扩展板上即可。
使用传感器扩展板,你可以更快速的搭建出你自己的项目
传感器扩展板如图所示,它是最常用的Arduino外围硬件之一。
接线说明
在扩展板上,数字引脚和模拟输入引脚边有红黑两排排针,以“+”、“-”号标示。
“+”表示VCC,“-”表示GND。
在一些厂家的扩展板上,VCC和GND可能也会以“V”、“G”标示。
通常我们习惯用红色代表电源(VCC),黑色代表地(GND),其他颜色代表信号(signal)。
传感器与扩展板间的连接线也是这样。
在使用其他模块时,你只需要对应颜色,把模块插到相应的引脚,便可使用了。
颜色识别传感器原理

颜色识别传感器原理颜色识别传感器是一种能够识别物体颜色的传感器,它可以广泛应用于工业自动化、机器人、智能家居等领域。
其原理主要基于光学和电子技术,通过对物体反射的光信号进行分析,从而实现对颜色的识别。
下面将详细介绍颜色识别传感器的原理及其工作过程。
1. 光学原理。
颜色识别传感器利用光学原理来实现对物体颜色的识别。
当光线照射到物体表面时,不同颜色的物体会吸收或反射不同波长的光。
传感器通过接收物体反射的光信号,利用光电二极管等光敏元件将光信号转换为电信号,然后对这些电信号进行分析,从而确定物体的颜色。
2. 色彩空间。
在颜色识别中,常用的色彩空间有RGB色彩空间、CMYK色彩空间、HSV色彩空间等。
RGB色彩空间是通过红、绿、蓝三种基色的组合来表示颜色,CMYK色彩空间是通过青、品红、黄、黑四种颜色的组合表示颜色,而HSV色彩空间则是通过色相、饱和度、亮度三个参数来描述颜色。
传感器可以根据不同的应用需求选择合适的色彩空间进行颜色识别。
3. 颜色识别算法。
颜色识别传感器通过内置的颜色识别算法来对接收到的光信号进行处理,从而实现对物体颜色的识别。
常用的颜色识别算法包括阈值法、统计法、模式匹配法等。
阈值法是通过设置一定的阈值来判断物体的颜色,统计法是通过对一定区域内的像素颜色进行统计来确定物体的颜色,而模式匹配法则是通过比较物体颜色和预先设定的颜色模式进行匹配来实现颜色识别。
4. 工作过程。
颜色识别传感器在工作时,首先会发射一束光线照射到物体表面,然后接收物体反射的光信号。
接收到的光信号经过光电二极管等光敏元件转换为电信号,然后通过内置的颜色识别算法对这些电信号进行处理,最终确定物体的颜色。
传感器可以输出数字信号或模拟信号,从而实现对物体颜色的精确识别。
5. 应用领域。
颜色识别传感器在工业自动化中广泛应用于产品分拣、包装装配、质量检测等领域。
在机器人领域,颜色识别传感器可以用于物体抓取、路径规划等任务。
在智能家居中,颜色识别传感器可以用于智能灯光控制、智能家电控制等方面。
Arduino控制WS2812改变颜色和调节亮度
Arduino控制WS2812改变颜色和调节亮度
安装WS2812驱动类库方法
点击Stretch—Include Library---Manage Library
或者直接按快捷键 Ctrl+Shit+I
弹出LibraryManager 窗口,在框里输入 Adafruit_NeoPixel 按回车键就显示了的相关内容,找到Adafruit_NeoPixel,点击Intstall安装类库
连接WS2812与Arduino,WS2812的有三个线,V+,V-,IN。
V+接
Arduino的+5V, V-接Arduino的GND,IN接Arduino的6引脚
编写测试程序,点亮第一个灯,设置为红色
上传程序,WS2812第一个灯亮了,这样就成功的控制了WS2812
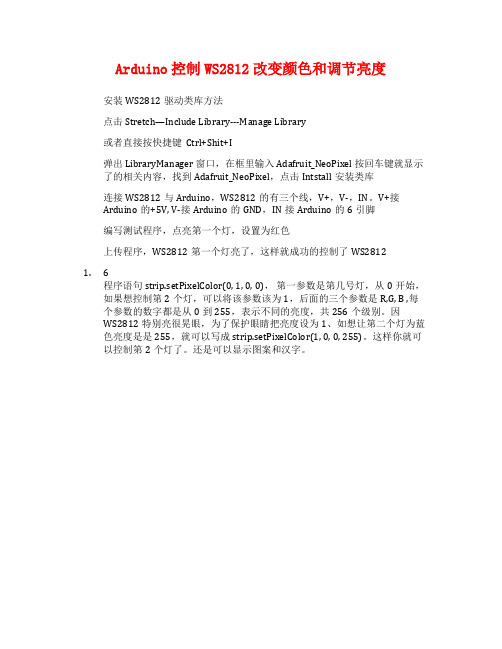
1. 6
程序语句strip.setPixelColor(0, 1, 0, 0),第一参数是第几号灯,从0开始,如果想控制第2个灯,可以将该参数该为1,后面的三个参数是R,G, B ,每个参数的数字都是从0到255,表示不同的亮度,共256个级别。
因
WS2812特别亮很晃眼,为了保护眼睛把亮度设为1、如想让第二个灯为蓝色亮度是是255,就可以写成strip.setPixelColor(1, 0, 0, 255)。
这样你就可以控制第2个灯了。
还是可以显示图案和汉字。
Arduino小车巡线程序的灰度阈值优化方案

Arduino小车巡线程序的灰度阈值优化方案1. 引言1.1 背景介绍Arduino小车巡线程序是一种常见的无人驾驶技术,通过灰度传感器检测地面颜色的变化来实现小车在黑线上的行驶。
灰度传感器是通过光电效应检测黑色和白色之间的光线反射强度差异,从而确定小车应该如何调整方向。
在这个过程中,灰度阈值起着至关重要的作用,它决定了传感器对不同颜色的反射光线的敏感程度。
正确设置灰度阈值可以使小车稳定地沿着黑线行驶,提高巡线的准确性和稳定性。
目前存在着灰度阈值设置不准确的问题,导致小车巡线性能不佳的情况。
有必要对灰度阈值进行优化,以提高小车巡线的效果。
本文将深入探讨灰度传感器原理、灰度阈值的重要性,分析现有的灰度阈值优化方法,并提出一种更有效的灰度阈值优化方案。
将通过实验验证新方案的有效性,并展望未来在这一领域的发展前景。
2. 正文2.1 灰度传感器原理灰度传感器是一种常用于巡线小车中的传感器,它能够检测地面的黑白色块,从而帮助小车准确地跟踪线路。
灰度传感器的原理是通过感知地面的反射光线强弱来确定黑白色块的位置。
具体来说,当灰度传感器感知到黑色时,反射光线较弱,传感器输出的数值较小;当灰度传感器感知到白色时,反射光线较强,传感器输出的数值较大。
灰度传感器通常由一组发光二极管和接收器件组成,发光二极管发出红外光,接收器件接收反射光,并通过比较反射光的强弱来判断地面颜色。
在实际应用中,我们需要根据地面环境的不同来调整灰度传感器的阈值,以确保小车能够稳定地跟踪线路。
灰度传感器原理的理解对于灰度阈值的优化非常重要。
只有深入理解灰度传感器的工作原理,才能够制定出合理有效的灰度阈值优化方案,从而提高巡线小车的性能和精度。
在进行灰度阈值优化时,首先需要对灰度传感器的原理有清晰的认识,才能取得更好的调试效果。
【字数:257】2.2 灰度阈值的重要性灰度阈值在Arduino小车巡线程序中起着至关重要的作用。
通过合理设置灰度阈值,可以准确识别黑色线条和白色背景之间的灰度差异,从而指导小车进行正确的线路跟踪。
Arduino小车巡线程序的灰度阈值优化方案

Arduino小车巡线程序的灰度阈值优化方案在Arduino小车巡线程序中,灰度阈值是非常重要的一个参数。
它决定了小车如何根据传感器读数来判断当前所处的线路情况。
优化灰度阈值可以提高小车巡线的稳定性和准确性。
下面是一种基于灰度阈值优化的方案,可以帮助改进Arduino小车巡线程序的性能。
1. 灰度传感器校准:在程序开始前,对灰度传感器进行校准,获取每个传感器的最大值和最小值。
可以让小车在白色衬底上运行一段时间,记录传感器读数,然后在黑色线路上重复上述步骤。
通过这样的校准,可以得到每个传感器在白色和黑色情况下的最大值和最小值。
2. 确定灰度阈值:根据传感器校准的结果,可以计算出每个传感器的灰度阈值。
可以选择将传感器读数的中位数作为阈值,或者通过分析传感器读数的分布得到合适的阈值。
根据阈值的计算方法,可以得到每个传感器的阈值。
3. 动态调整灰度阈值:在小车巡线的过程中,灰度值可能会受到外界环境的影响而发生变化,比如光线强度的改变、地面颜色的变化等。
为了应对这种变化,可以在程序中设置一个动态调整灰度阈值的机制。
可以通过比较当前传感器读数和阈值的差异,来判断是否需要重新计算阈值,并在需要的时候更新阈值。
4. 平滑灰度读数:在Arduino小车巡线程序中,灰度传感器读数可能会有一些误差,例如由于传感器悬空、光线干扰等因素导致的噪声。
为了减小这种误差的影响,可以对灰度传感器读数进行平滑处理。
可以使用滑动平均算法,即将多次读取的灰度值取平均,然后再进行巡线判断。
这样可以减小因为一次读数误差导致的不准确问题。
5. 动态调整巡线速度:在小车巡线的过程中,可能会遇到曲线、拐角等特殊情况。
为了使小车能够更好地适应这些情况,可以根据当前的巡线情况动态调整巡线速度。
在直线段上可以加快速度,而在曲线段上可以降低速度。
这样可以提高小车对曲线、拐角等特殊情况的响应能力。
6. 灰度传感器布线优化:灰度传感器的布局也会影响巡线程序的表现。
Arduino小车巡线程序的灰度阈值优化方案

Arduino小车巡线程序的灰度阈值优化方案Arduino小车巡线程序是一项非常有趣和具有挑战性的项目,它将控制系统、机械结构、传感器和程序设计等各种知识融为一体,通过优化灰度阈值可以提高小车的巡线性能,下面我们将介绍关于Arduino小车巡线程序的灰度阈值优化方案。
一、灰度传感器原理及作用灰度传感器是一种能够检测物体表面颜色浓淡程度的传感器,它的工作原理是通过LED发射光线,再通过检测物体反射的光线来计算颜色的浓淡程度。
在小车巡线程序中,灰度传感器可以用来检测地面黑线和白线的颜色,进而控制小车沿着线路行驶。
在程序设计中,可以通过读取灰度传感器的数值来判断小车当前位置与线路的距离,然后通过控制小车的车轮转速来实现沿着线路行驶的目标。
二、灰度阈值的优化方案1. 灰度传感器的校准在使用灰度传感器之前,首先需要对传感器进行校准,以保证其稳定可靠的工作。
校准的过程是通过读取传感器在不同颜色表面上的数值,然后根据实际情况调整传感器的灵敏度和检测范围,使得传感器能够准确地识别黑线和白线之间的颜色差异。
校准的结果将直接影响后续灰度阈值的选择和优化。
2. 灰度阈值的选择灰度阈值的选择是小车巡线程序的关键步骤之一,它决定了小车能否准确地沿着线路行驶。
一般来说,可以通过采集灰度传感器在黑线和白线上的数值,然后计算出它们的平均值作为灰度阈值。
还可以根据实际情况调整灰度阈值的大小,以适应不同地面材质和光照条件。
4. 灰度阈值的测试在优化灰度阈值之后,还需要对小车巡线程序进行测试,以验证灰度阈值的有效性和稳定性。
在测试过程中,可以选择一定长度和复杂度的线路,然后观察小车是否能够准确地沿着线路行驶,以及是否存在偏移、抖动和漂移等问题。
如果出现问题,就需要重新调整灰度阈值和优化程序设计,直到小车能够稳定地巡线。
三、总结通过对Arduino小车巡线程序的灰度阈值优化方案的介绍,我们可以看到灰度传感器在小车巡线中的重要作用以及灰度阈值的选择和优化对程序性能的影响。
arduino三路循迹原理
arduino三路循迹原理
Arduino三路循迹原理主要是基于红外传感器的工作原理。
这种循迹模块通常具有多个引脚,包括VCC、GND和多个信号输出引脚,每个引脚对应不同的红外传感器。
在循迹模块中,红外发射管发出红外线,当遇到白色地面或其他可以反射红外光的物体时,红外线会被反射回来,被红外接收管接收;如果遇到黑色地面或其他可以吸收红外光的物体,红外线则会被吸收,红外接收管接收不到信号。
三路循迹模块具有三个红外传感器,每个传感器可以检测其下方的地面颜色。
通常情况下,我们将这三个传感器分别接在Arduino的三个数字引脚上,通过读取这三个引脚的电平状态,就可以判断小车当前的位置以及应该行驶的方向。
具体来说,如果中间传感器的引脚读到高电平(表示检测到黑色轨迹),那么说明小车正在轨迹上行驶,应保持当前方向不变;如果左边或右边传感器的引脚读到高电平(表示检测到黑色轨迹),则说明小车偏离了轨迹,需要向相应方向调整,以使小车重新回到轨迹上。
通过编写相应的代码,我们就可以实现小车的自动循迹功能。
这种循迹方式简单易行,成本低廉,因此在智能小车、机器人等领域得到了广泛的应用。
物体颜色识别
81 硬 件 Leabharlann 备连接方式将TCS3472的VCC和 GND分别接至Arduino 的5V和GND,将SCL和 SDA分别接至Arduino 的SCL和SDA。在连接 时,需要确保接线正 确,以免损坏硬件
2 软件准备
2 软件准备
在软件方面,我们需要安装 Arduino IDE,并编写代码来实
122 软 件 准 备
代码实现物体颜色识别
接下来,我们需要编写代码来实现物体颜色识别。以下是一个简单的示例程序
1-3 -
THANKS
感谢观看
XXX
--
硬件准备
目录
软件准备
30 a r d u i n o 物 体 颜 色 识 别
A
物体颜色识别是机器视觉领域的一
个重要应用,通过颜色识别技术,
我们可以让机器具备识别不同颜色
的能力,从而实现对物体的分类、
定位等操作
B
下面将介绍如何使用Arduino实现物 体颜色识别
1 硬件准备
1 硬件准备
实现Arduino物体颜 色识别需要以下硬件
现物体颜色识别
此外,如果使用树莓派等其他微 控制器,还需要进行相应的配置
121 软 件 准 备
Arduino IDE安装与配置
首先,需要在计算机上安装Arduino IDE。 安装完成后,打开IDE,选择"文件"->"示例 "->"库"->"TCS3472"->"TCS3472_basic"。 这个示例程序可以让我们测试TCS3472是否 正常工作。上传程序后,当程序运行时,会 打印出当前环境的颜色值。如果看到类似 I2C Scanning TCS3472 0x40的输出,说明 TCS3472已经成功连接并开始工作
arduino触摸传感器原理

arduino触摸传感器原理Arduino触摸传感器原理什么是Arduino触摸传感器?Arduino触摸传感器是一种用于检测触摸事件的装置。
它通常由一个细长的导电材料组成,当物体接触到导电材料时,传感器将能够感知到触摸事件,并将其转化为电信号,以便Arduino能够读取和识别。
Arduino触摸传感器的工作原理Arduino触摸传感器利用了电容的原理来检测触摸。
当一个物体接触传感器时,物体和传感器之间形成了一个电容器。
由于物体和传感器之间的电容很小,通过测量电容的变化,可以检测到是否发生了触摸。
Arduino触摸传感器的电路连接为了能够将Arduino与触摸传感器连接起来,我们需要使用一些外部电子元件。
以下是一个简单的连接图示:•将传感器的一个端口通过电阻连接到Arduino的数字引脚。
•另一个传感器端口连接到Arduino的地线(GND)。
•Arduino的电源引脚连接到传感器的供电引脚。
通过Arduino读取触摸传感器的数值通过Arduino可以读取触摸传感器的数值,根据数值的变化可以判断触摸的强度或触摸的位置。
以下是读取触摸传感器数值的基本代码示例:int sensorPin = A0; // 触摸传感器连接到模拟引脚A0int sensorValue = 0; // 存储传感器读取数值void setup() {(9600); // 初始化串行通信}void loop() {sensorValue = analogRead(sensorPin); // 读取传感器数值 (sensorValue); // 将数值输出到串行监视器delay(100); // 延时100毫秒}Arduino触摸传感器的应用Arduino触摸传感器可以广泛应用于各种项目中。
例如,可以使用触摸传感器制作一个触摸开关,在触摸开关被按下时触发某个动作或操作。
此外,它还可以被用于控制灯光、声音、温度等各种装置。
总结通过本文,我们了解了Arduino触摸传感器的原理和应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
白平衡就是告诉系统什么是白色。从理论上讲,白色是由等量的红色、绿色和蓝色混合而成的;但实际上,白色中的三原色并不完全相等,并且对于TCS230的光传感器来说,它对这三种基本色的敏感性是不相同的,导致TCS230的RGB输出并不相等,因此在测试前必须进行白平衡调整,使得TCS230对所检测的“白色”中的三原色是相等的。进行白平衡调整是为后续的颜色识别作准备。在本装置中,白平衡调整的具体步骤和方法如下:将空的试管放置在传感器的上方,试管的上方放置一个白色的光源,使入射光能够穿过试管照射到TCS230上;根据前面所介绍的方法,依次选通红色、绿色和蓝色滤波器,分别测得红色、绿色和蓝色的值,然后就可计算出需要的三个调整参数。
g_SF[1] = 255.0/ g_array[1] ; //G Scale factor
g_SF[2] = 255.0/ g_array[2] ; //B Scale factor
Serial.println(g_SF[0]);
Serial.println(g_SF[1]);
Serial.println(g_SF[2]);
{
if(Level01 != 0)
Level01 = HIGH;
if(Level02 != 0)
Level02 = HIGH;
digitalWrite(S2, Level01);
digitalWrite(S3, Level02);
}
void TSC_Count()
{
g_count ++ ;
}
void TSC_Callback()
#define S0 6 // Please notice the Pin's define
#define S1 5
#define S2 4
#define S3 3
#define OUT 2
int g_count = 0; // count the frequecy
int g_array[3]; // store the RGB value
{
switch(g_flag)
{
case 0:
Serial.println("->WB Start");
TSC_WB(LOW, LOW); //Filter without Red
break;
case 1:
Serial.print("->Frequency R=");
Serial.println(g_count);
3、TCS230识别颜色的原理
由上面的三原色感应原理可知,如果知道构成各种颜色的三原色的值,就能够知道所测试物体的颜色。对于TCS230来说,当选定一个颜色滤波器时,它只允许某种特定的原色通过,阻止其它原色的通过。例如:当选择红色滤波器时,入射光中只有红色可以通过,蓝色和绿色都被阻止,这样就可以得到红色光的光强;同理,选择其它的滤波器,就可以得到蓝色光和绿色光的光强。通过这三个值,就可以分析投射到TCS230传感器上的光的颜色。
Timer1.attachInterrupt(TSC_Callback);
attachInterrupt(0, TSC_Count, RISING);
delay(4000);
for(int i=0; i<3; i++)
Serial.println(g_array[i]);
g_SF[0] = 255.0/ g_array[0]; //R Scale factor
Digital 5 - S1
Digital 4 - S2
Digital 3 - S3
Digital 2 - OUT
VCC - VCC
GND - GND
这样就可以把线接好了,接下来就是把程序下载进Arduino UNO里进去测试。
ARDUINO CODECOPY
#include <TimerOne.h>
Serial.println("->WB End");
g_array[2] = g_count;
TSC_WB(HIGH, LOW); //Clear(no filter)
break;
default:
g_count = 0;
break;
}
}
void TSC_WB(int Level0, int Level1) //White Balance
float g_SF[3]; // save the RGB Scale factor
// Init TSC230 and setting Frequency.
void TSC_Init()
{
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
#define S1 5
#define S2 4
#define S3 3
#define OUT 2
int g_count = 0; // count the frequecy
int g_array[3]; // store the RGB value
int g_flag = 0; // filter of RGB queue
pinMode(S3, OUTPUT);
pinMode(OUT, INPUT);
digitalWrite(S0, LOW); // OUTPUT FREQUENCY SCALING 2%
digitalWrite(S1, HIGH);
}
// Select the filter color
void TSC_FilterColor(int Level01, int Level02)
break;
case 1:
Serial.print("->Frequency R=");
Serial.println(g_count);
g_array[0] = g_count;
TSC_WB(HIGH, HIGH); //Filter without Green
break;
case 2:
Serial.print("->Frequency G=");
2、三原色的感应原理
通常所看到的物体的颜色,实际上是物体表面吸收了照射到它上面的白光(日光)中的一部分有色成分,而反射出的另一部分有色光在人眼中的反应。白色是由各种频率的可见光混合在一起构成的,也就是说白光中包含着各种颜色的色光(如红R、黄Y、绿G、青V、蓝B、紫P)。根据德国物理学家赫姆霍兹(Helinholtz)的三原色理论可知,各种颜色是由不同比例的三原色(红、绿、蓝)混合而成的。
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
pinMode(OUT, INPUT);
digitalWrite(S0, LOW); // OUTPUT FREQUENCY SCALING 2%
digitalWrite(S1, HIGH);
TSC_WB(HIGH, LOW); //Clear(no filter)
break;
default:
g_count = 0;
break;
}
}
void TSC_WB(int Level0, int Level1) //White Balance
{
g_count = 0;
g_flag ++;
TSC_FilterColor(Level0, Level1);
当用TCS230识别颜色时,就用这三个参数对所测颜色的R、G和B进行调整。这里有两种方法来计算调整参数:①依次选通三种颜色的滤波器,然后对TCS230的输出脉冲依次进行计数。当计数到255时停止计数,分别计算每个通道所用的时间。这些时间对应于实际测试时TCS230每种滤波器所采用的时间基准,在这段时间内所测得的脉冲数就是所对应的R、G和B的值。②设置定时器为一固定时间(例如10ms ),然后选通三种颜色的滤波器,计算这段时间内TCS230的输出脉冲数,计算出一个比例因子,通过这个比例因子可以把这些脉冲数变为255。在实际测试时,使用同样的时间进行计数,把测得的脉冲数再乘以求得的比例因子,然后就可以得到所对应的R、G和B的值
{
g_count = 0;
g_flag ++;
TSC_FilterColor(Level0, Level1);
Timer1.setPeriod(1000000); // set 1s period
}
void setup()
{
TSC_Init();
Serial.begin(9600);
Timer1.initialize(); // defaulte is 1s
}
void loop()
{
g_flag = 0;
for(int i=0; i<3; i++)
Serial.println(int(g_array[i] * g_SF[i]));
delay(4000);
}
#include <TimerOne.h>
#define S0 6 // Please notice the Pin's define
Arduino uno + Color sensor(颜色传感器)
TCS230识别颜色的原理:
TCS230这种可编程的彩色光到频率转换器适合于色度计测量应用领域,如彩色打印、医疗诊断、计算机彩色监视器校准以及油漆、纺织品、化妆品和印刷材料的过程控制和色彩配合。本文以TCS230在液体颜色识别中的应用为例,介绍它的具体使用。在开始介绍TCS230的颜色识别前,先来了解一些光与颜色的知识。