电磁航天器地面实验
航天器电源母线品质地面测试方法浅析

与系统稳定性密切相关。通过对航天器 电源母线 品质地面 测试与评 价方法 进行分析 , 给 出 了测试 系统 的简 要设 计, 并对技术发展趋势进行 了预测 。
关键词 母线品质 直流分布式电源 稳定性 故障预测
An a l y s i s o f T e s t Me t h o d s S p a c e c r a f t P o we r B u s Qu a l i t y
S UN Yi S ONG S h i — mi n LI U Mi n
( 1 . B e i j i n g O r i e n t I n s i t t u t e f o r Me a s u r e m e n t &T e s t , B e r i n g 1 0 0 0 8 6 ; 2 . I n s i t t u t e o f S p a c e c r a f t S y s t e m E n g i n e e r i n g C A S T, B e i j i n g 1 0 0 0 9 4 )
c o n t r o l ,t r a ns mi t a n d d i s t r i b u t e po we r ,i t s g r o u n d t e s t i n g i s a n i mpo r t a nt p a r t o f t h e s p a c e c r a f t ro g u n d t e s - t i n g.S p a c e c r ft a p o we r s y s t e m i s a t y p i c a l DC d i s t ib r u t e d p o we r s y s t e m ,t he q ua l i t y a n d s t a b i l i t y o f t he p o we r b u s i s c l o s e l y r e l a t e d t o t h e q ua l i t y o f s p a c e c r ft a p o we r s y s t e m. An a l y z e s t he t e s t i n g me t h o d s o f s p a c e c r ft a p o we r b us q u li a t y,g i v e s a b ie r f t e s t s y s t e m d e s i g n a n d p r e d i c t s t e c h n o l o g y t r e n d s . Ke y wo r ds Bu s b a r q u a l i t y DC d i s t r i b u t e d p o we r s up p l y S t a b i l i t y Fa i l u r e f o r e c a s t i n g
航天器接地——精选推荐
引言航天器系统级接地方案设计作为航天器总体电磁兼容(EMC)设计工作内容之一,其主要目的是减小各设备和/或分系统之间的电磁干扰(EMI)。
在航天器总体方案设计伊始就必须确定航天器的系统级接地方案,通常包括电源、射频接口和火工品等的接地,接地方案的具体选取和实施必须结合所针对航天器的特点。
1 接地系统的类型接地是指在两点之间建立导电的通路,把系统中的电气或电子设备同时与某个称作“地”的参考点连接起来。
接地是一个电路的概念,而搭接是指在两个金属表面间建立低阻抗的通路,是接地的物理实现。
理想的“地”是一个零电位、零阻抗的物理实体,它可以作为各功能电路中所有信号电平的参考点,并且任何无用电流通过它,都不会产生电压降。
一个接地系统的接地效果,取决于系统中两点之间可能存在的电位差及通过该系统的电流的大小。
一个良好的“地”,其电位应该是:与任何功能电路的电位比较,都可以忽略不计。
航天器两种重要的接地系统类型就是单点接地和多点接地。
单点接地是指所有电路的公共地通过与航天器结构上的唯一点连接实现接地。
由于单点接地结构的所有接地线均从唯一的接地点引出,较长的接地线具有较高的电感,接地效果会在信号频率较高时受到影响。
多点接地是指每一个设备的公共地都直接与航天器结构相连,这种接地方式只对射频设备适用,对视频信号或其它低频(约小于1MHz)信号不适用。
多、单点接地是一种更好的接地系统,航天器上的每一个部件,以及每一台设备的机壳都有且只有一个与航天器结构相连的路径,航天器结构上不存在有意电流,所有的分系统都有一个公共的直流参考电压。
最好的接地方式是多、单点接地,但对于实际工程而言,并不会都采用这种接地方式。
接地方式的具体选择,还需根据航天器的尺寸、复杂程度,以及一些特殊设备的特殊要求等。
2 航天器接地方式的选取在决定航天器应该采取何种接地方式时,必须依据航天器的具体特点和其对接地控制程度的要求进行。
首先根据航天器的直径、质量、设计寿命、功率、EMC要求和可靠性级别将其分为大型、中型和小型。
真空辐射热循环实验地面模拟
Thermal Vacuum Chamber (NUV+VUV)热真空辐射试验舱(近紫外辐射/真空紫外辐射)Brief Product Information试验目的:太阳紫外辐照影响暴露在航天器外表面的有机材料、高分子材料、光学材料、薄膜、粘合剂和涂层等材料,直接影响到航天器的寿命和可靠性。
紫外辐照试验主要检验材料在空间环境中承受紫外辐照的能力,评价材料性能变化是否在设计所允许的范围内。
由于紫外线对材料的损伤机理非常复杂,很难从理论上找到适用于材料性能退化的可靠普遍规律。
还有材料的许多性能在真空中也有可能发生变异,热真空试验可以验证材料经受热真空环境的能力,检验其设计的合理性,暴露材料潜在缺陷。
随着我国长寿命,高可靠航天器研制的需要,在航天材料的研究中,切实可行的方法就是对材料进行热真空试验和紫外辐射试验。
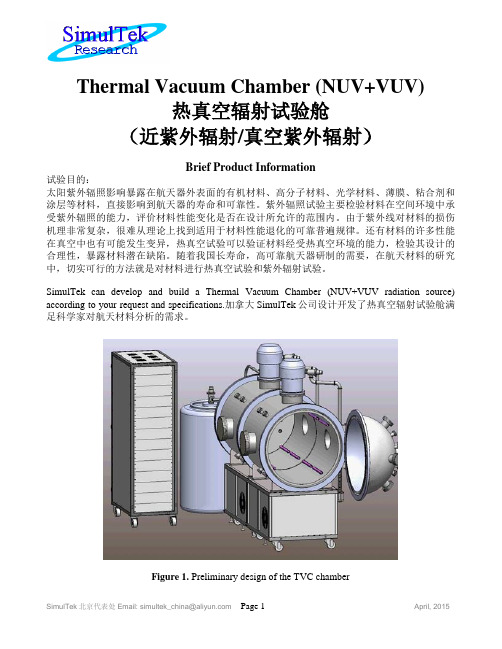
SimulTek can develop and build a Thermal Vacuum Chamber (NUV+VUV radiation source) according to your request and specifications.加拿大SimulTek公司设计开发了热真空辐射试验舱满足科学家对航天材料分析的需求。
Figure 1. Preliminary design of the TVC chamberThe TVC chamber(NUV+VUV)can be used to conduct Thermal Balance Tests, Thermal Cycle Tests, Thermal Shock Tests, irradiation Tests, and Burn-In Tests, in both vacuum and gaseous environments. The TVC chamber operation and thermal vacuum testing are performed in either manual or automatic mode.热真空辐射试验舱可用于做热平衡试验,热循环试验和热冲击试验,紫外辐照试验以及老化试验。
电磁助推翼段加速地面效应及稳定性分析
第9卷㊀第1期2024年1月气体物理PHYSICSOFGASESVol.9㊀No.1Jan.2024㊀㊀DOI:10.19527/j.cnki.2096 ̄1642.1081电磁助推翼段加速地面效应及稳定性分析罗星东ꎬ㊀侯自豪ꎬ㊀李少伟ꎬ㊀薄靖龙ꎬ㊀翟茂春(中国航天科工飞航技术研究院磁电总体部ꎬ北京100074)GroundEffectsandStabilityAnalysisofAirfoilAcceleratedbyElectromagneticPropulsionLUOXingdongꎬ㊀HOUZihaoꎬ㊀LIShaoweiꎬ㊀BOJinglongꎬ㊀ZHAIMaochun(InstituteofMagneticLevitationandElectromagneticPropulsionꎬHIWINGTechnologyAcademyofCASICꎬBeijing100074ꎬChina)摘㊀要:电磁发射空天飞行器是未来可重复使用天地往返运输系统的重要发展方向之一ꎬ近地助推加速过程受电磁悬浮力影响ꎬ面临着复杂的地面效应与弹性稳定性问题ꎮ以NACA0012二维翼段为研究对象ꎬ建立了电磁力与气动力耦合的动力学模型ꎬ对翼段近地Ma=0~1.5加速过程中的流场特征㊁运行姿态和气动特性进行了数值模拟ꎮ结果表明ꎬ翼段加速诱导地面效应可分为4阶段ꎮ第1阶段ꎬ上下翼面为亚声速流动ꎬ翼段姿态和气动载荷基本无振荡ꎮ第2阶段ꎬ上翼面开始出现跨声速流动ꎬ下翼面流动以典型的变截面跨声速流动为主导ꎬ并伴随壅塞-通流模态转换ꎮ第3阶段ꎬ上翼面保持跨声速流动ꎬ下翼面流动壅塞再现ꎬ并呈现出完全膨胀的跨声速壅塞流动状态ꎮ在第2㊁3阶段ꎬ翼段姿态和气动载荷低频大幅振荡ꎮ第4阶段ꎬ上翼面发展为超声速流动ꎬ下翼面保持完全膨胀壅塞流动ꎬ翼段姿态和气动载荷高频小幅振荡ꎮ在此基础上ꎬ探究了悬浮高度㊁悬浮刚度㊁磁体间距对系统稳定性的影响ꎮ发现增加悬浮高度ꎬ有利于在一定程度上提高系统稳定性ꎻ适当增加悬浮刚度或悬浮磁体间距ꎬ同时限定电磁助推目标速度小于系统振荡发散临界Mach数ꎬ有利于明显提高系统稳定性ꎮ关键词:电磁发射ꎻ地面效应ꎻ弹性系统ꎻ壅塞流动ꎻ稳定性㊀㊀㊀中图分类号:V211.5㊀㊀文献标志码:A收稿日期:2023 ̄08 ̄31ꎻ修回日期:2023 ̄10 ̄09基金项目:国家自然科学基金(12072014)第一作者简介:罗星东(1993 )㊀男ꎬ硕士ꎬ主要研究电磁发射地面效应㊁飞行器内外流ꎮE ̄mail:star_east@outlook.comAbstract:Aerospacevehiclelaunchedbyelectromagneticpropulsionisapotentialoptionforfuturereusablespacetranspor ̄tationsystems.Complexgroundeffectsandstabilityissuesareinducedgenerallyduetotheintroductionofelectromagneticlevitationforce.Adynamicmodelcoupledwithelectromagneticforceandaerodynamicforcewasestablishedforthetwo ̄di ̄mensionalwing(NACA0012).NumericalsimulationswereconductedontheflowcharacteristicsꎬoperationalattitudeꎬandaerodynamiccharacteristicsofthewingduringtheMa=0~1.5accelerationprocess.Itindicatesthatgroundeffectscanbedividedintofourstages.Inthefirststageꎬsubsonicflowsarepresentedonboththeupperandlowerwingsurfacesꎬandthereisbasicallynooscillationfortheattitudeandaerodynamicloadsofthewing.Inthesecondstageꎬtransonicflowemer ̄gesontheupperwingsurfaceꎬwhiletheflowonthelowerwingsurfaceisdominatedbyatypicalvariablecross ̄sectiontransonicflowaccompaniedbythetransitionfromthechokedflowmodetotheunchokedone.Inthethirdstageꎬtheupperwingsurfacemaintainstransonicflowsꎬwhilethelowerwingsurfaceundergoeschokedflowswhicharefullyexpanded.Inboththesecondandthirdstagesꎬthewingattitudeandaerodynamicloadsoscillatesignificantlyatlowfrequencies.Inthefourthstageꎬtheupperwingsurfaceundergoessupersonicflowsꎬwhilethelowerwingsurfacemaintainschokedflows.Thewingattitudeandaerodynamicloadsoscillateslightlyathighfrequencies.Onthisbasisꎬtheeffectsofsuspensionheightꎬsuspensionstiffnessandspacingbetweensuspensionmagnetsonthesystemstabilitywereexplored.Itisfoundthatincrea ̄singthesuspensionheightisbeneficialforimprovingsystemstability.Increasingthesuspensionstiffnessorspacingbetweensuspensionmagnetsappropriatelyꎬwhilelimitingthetargetspeedofelectromagneticpropulsiontobelessthanthecritical气体物理2024年㊀第9卷Machnumberofsystemoscillationdivergenceꎬisbeneficialforsignificantlyimprovingsystemstability.Keywords:electromagneticlaunchꎻgroundeffectꎻelasticsystemꎻchokedflowꎻstability引㊀言新一代空天飞行器采用组合循环动力技术ꎬ可水平起降与重复使用ꎬ并可自由穿梭于低空㊁临近空间乃至近地轨道ꎬ是未来争夺太空经济和军事主动权的重要途径ꎮ由于飞行过程须跨越亚㊁跨㊁超㊁高超声速ꎬ所以需要兼顾飞行器在宽速域㊁大空域下的气动布局和组合动力效率等问题ꎬ这对系统设计提出了极大挑战[1]ꎮ涡波效应-乘波设计㊁机翼-乘波设计和变形/组合设计是目前发展宽速域飞行器的几种主要思路[2]ꎮ近年来ꎬ电磁发射技术逐渐成熟ꎬ为克服上述难题提供了另一种颇具潜力的解决方案[3]ꎮ利用电磁橇将飞行器在近地助推至超声速ꎬ能够有效规避低速起飞阶段ꎬ增加系统设计冗余度ꎮ国内外已对此开展了电磁助推发射方案验证和缩比模型试验验证[4]ꎮ不同于开域飞行ꎬ地面为近地流动营造了独特的半开放约束空间ꎬ通常诱发以复杂激波现象为主导的跨/超声速地面效应干扰ꎮ除空气动力学特性外ꎬ飞行器还处于电磁弹性力-气动力-结构弹性力多物理场耦合环境中ꎬ面临着复杂的气动弹性及稳定性问题ꎮ深入认知电磁助推加速地面效应并探索调控系统稳定性的手段是电磁发射技术开发的重要前提ꎮ依托地效飞行器[5ꎬ6]㊁航天器着陆[7ꎬ8]等研究背景ꎬ研究人员对低亚声速地面效应已建立起较丰富的认识[9 ̄11]ꎮMorrow等[12]通过研究发现ꎬ与低亚声速地面效应不同ꎬ跨/超声速地面效应更为复杂ꎬ以激波及其反射现象为主要特征ꎮ罗世彬等[13]综述了电磁助推发射的气动关键技术ꎬ认为飞行器-电磁橇在加速至超声速过程中ꎬ多体之间强烈的激波干扰会影响滑跑稳定性ꎮ研究人员对跨/超声速地面效应开展了必要讨论ꎮ在实验研究方面ꎬDoig等[14 ̄16]㊁Barber等[17]㊁Kleine等[18]㊁Sheridan等[19]采用镜像模型法ꎬ巧妙地消除了风洞中静止地面边界层的影响ꎬ对尖劈和子弹等简化构型在不同离地高度㊁来流速度下的超声速近地流场进行了实验ꎮ研究发现ꎬ当离地高度较小时ꎬ飞行器前缘上部呈现为脱体弓形激波ꎬ而下部因局部地面效应呈现为驻定正激波ꎮ除风洞实验外ꎬPurdon等[20]通过对比实弹射击和风洞实验结果ꎬ研究了静止地面对子弹超声速近地流场的影响ꎮ在数值模拟研究方面ꎬOliviu等[21]研究了圆柱体近地流动中的激波反射和尾涡结构ꎮGao等[22]研究了跨声速地面效应下激波-边界层干扰导致的压力脉动和抖振现象ꎮ陈晓东等[23]研究了磁悬浮助推发射装置的气动特性并进行了风洞缩比实验ꎮ肖虹等[24]计算了Ma=0.1~2.0范围内某钝头体火箭橇实验中的地面效应干扰ꎮ王伟等[25]针对细长体开展了Ma=2.5下不同攻角以及不同离地高度的地面效应研究ꎮYu等[26]进一步研究了乘波体构型在复杂地面构型下的地面效应流场和气动特性ꎮ与上述静态地面效应不同ꎬ助推加速引起的非定常地面效应更为复杂多变[27]ꎬ常伴随流场结构非定常转变和气动载荷非线性时变ꎬ并出现双解问题和迟滞现象[28 ̄30]ꎮ针对非定常地面效应流动机理的研究尚处于起步阶段ꎬ仍待深入研究ꎮ气动弹性及稳定性问题在电磁发射中同样不可忽略ꎮ已有研究主要关注气动力-结构弹性力构成的经典弹性系统ꎮ例如ꎬNuhait等[31]㊁Dessi等[32]研究了二维翼型在地面效应下的颤振特性ꎬ结果表明地面效应具有使翼型失稳的作用ꎮ张斌等[33]通过涡诱导的圆柱自由振荡算例和二维颤振标模ꎬ研究了地面效应对气动弹性动态响应和颤振边界的影响ꎮ此外ꎬ电磁弹性力的引入将使得气动弹性问题更加突出㊁独特和复杂ꎮ为突出重点和分解难点ꎬ本文基于逐步解耦的思路ꎬ选取NACA0012典型二维翼段作为研究对象ꎬ对电磁弹性力-气动力耦合作用下的翼段加速地面效应进行研究ꎬ重点关注翼段加速过程中的流场㊁姿态和气动载荷的演变规律ꎬ同时考察弹性系统参数对电磁助推稳定性的影响ꎮ1㊀气动-电磁耦合模型和数值计算方法1.1㊀物理模型和控制方程图1为考察的二维NACA0012翼段示意图ꎮ坐标系原点O与翼段质心初始位置重合ꎬX轴沿水平方向ꎬ与电磁推进方向相反ꎻY轴沿铅垂方向ꎬ竖直向上ꎻZ轴由右手法则确定ꎮ翼段上下型线对称ꎬ弦长l为1.0mꎬ质心距离翼前缘0.4mꎬ俯仰角为体轴与X轴夹角ꎬ规定抬头为正ꎬ简记为θꎬ初始时刻θ=θ0ꎮ单位展长翼段质量为82.0kgꎬ转64第1期罗星东ꎬ等:电磁助推翼段加速地面效应及稳定性分析动惯量I为11.4kg m2ꎮ电磁悬浮系统的地面模组内置于地面ꎬ翼段通过预先布置于AꎬB两处的磁体与地面模组感应产生电磁悬浮力ꎬ从而悬浮于平面轨道上ꎮ质心离地悬浮高度为hꎬ初始时刻h=0.5mꎮ电磁悬浮力与悬浮高度相关ꎮ悬浮力可简化为位于翼段上AꎬB两点的 弹簧振子 ꎮ弹簧刚度k0与电磁悬浮刚度一致ꎬ为150kN/mꎮ翼段以加速度a=100m/s2向左匀加速运动ꎬ并保留沿Y向平动和绕Z轴转动ꎮ图1㊀电磁助推NACA0012翼段受力示意图Fig.1㊀SchematicdiagramofforceanalysisoftheNACA0012wingacceleratedbyelectromagneticpropulsion对于存在运动边界(即翼段)的非定常数值模拟ꎬ采用任意Lagrange ̄Euler形式的流动控制方程求解ꎮ在控制体V内ꎬ积分形式的质量守恒㊁动量守恒和能量守恒方程通式为ddtʏVρϕdV+ʏ∂Vρϕ(u-us) dA=ʏ∂VΓ(Ñϕ) dA+ʏVSϕdV(1)式中ꎬρ是气体密度ꎻ∂V代表控制体边界ꎻA是网格面矢量ꎻϕ=(1ꎬuiꎬT)是通用变量ꎬ其中ꎬi=1ꎬ2ꎬ3ꎻu=uj是速度矢量ꎬ其中ꎬj=1ꎬ2ꎬ3ꎻus=(us1ꎬus2ꎬus3)是网格运动速度矢量ꎻΓ=(0ꎬμꎬkT/cp)是广义扩散系数ꎻSϕ=(0ꎬ∂p/∂xi+SiꎬST)是广义源项ꎮ其中ꎬμ是动力黏度ꎬkT是流体传热系数ꎬcp是比热容ꎬp是静压ꎬT是温度ꎬSi是动量方程源项ꎬST是能量方程黏性耗散项ꎮ为封闭上述方程ꎬ引入理想气体状态方程p=ρRTꎬ其中ꎬR是摩尔气体常数ꎮ上述方程中ꎬ位于运动物体表面的us项须通过求解电磁弹性力-气动力耦合的动力学方程组获得ꎮ为建立动力学模型ꎬ以下对电磁弹性力进行建模ꎬ并给出电磁弹性力-气动力耦合受力模型ꎮ对图1中翼段进行简要受力分析ꎮ翼段受气动阻力D和气动升力L作用ꎬ二者对质心产生气动力矩Mair=-OPˑ(L+D)ꎬ其中P点为气动压心ꎮ此外ꎬ电磁悬浮力F1ꎬF2分别对质心产生电磁力矩M1ꎬM2ꎮ规定电磁悬浮力㊁气动力与XꎬY轴正方向一致为正ꎬ电磁力矩和气动力矩抬头为正ꎮ则有F1(t)=-k(yA-yA0)+F1ꎬt=0(2)F2(t)=-k(yB-yB0)+F2ꎬt=0(3)M1(t)=-OAˑF1(4)M2(t)=-OBˑF2(5)式中ꎬ等号第2项F1ꎬt=0和F2ꎬt=0表示求解初始时刻弹簧振子AꎬB具有的Y向初始电磁悬浮力ꎮ因此ꎬ绕翼段质心的刚体动力学二自由度控制方程为my㊆=L+F1+F2-mg(6)Iθ㊆=Mair+M1+M2(7)式中ꎬy㊆是翼段质心垂向加速度ꎬθ㊆㊀是翼段绕质心的俯仰角加速度ꎮ对上述矢量方程进行标量化处理ꎬ则电磁悬浮力F1ꎬF2为F1=-k(yA-yA0)+F1ꎬt=0(8)F2=-k(yB-yB0)+F2ꎬt=0(9)式中ꎬyAꎬyB分别是任意时刻AꎬB点的Y向坐标ꎮ由刚体运动关系ꎬyAꎬyB可由O点平动位移y和相对O点的转动位移给定ꎮ以图1中B点为例χB=arccosOBt=0 (1ꎬ0)OBt=0(10)yB=y-OBsin(χB+Δθ)(11)式中ꎬχB是初始时刻由质心水平单位正矢量顺时针74气体物理2024年㊀第9卷转动至与OB共线时的几何夹角ꎬ值域为[0ꎬp]ꎮDθ是相对于初始时刻的俯仰角变化量ꎮ同理χA=arccosOAt=0 (1ꎬ0)OAt=0(12)yA=y-OAsin(χA+Δθ)(13)进一步地ꎬ将式(8)~(13)代入式(6)㊁(7)可得弹性系统控制方程的标量一般形式my㊆+k[2y-lBsin(χB+Δθ)-lAsin(χA+Δθ)-(yA0+yB0)]=L-mg+(F1ꎬt=0+F2ꎬt=0)(14)Iθ㊆-lAcos(χA+Δθ)ˑ{-k[y-lAsin(χA+Δθ)-yA0]+F1ꎬt=0}+lBcos(χB+Δθ)ˑ{-k[y-lBsin(χB+Δθ)-yB0]+F2ꎬt=0}=Mair(15)式中ꎬlA和lB表示AꎬB弹簧作用点与质心的距离ꎬ即lA=OAꎬlB=OBꎮ本文考察相对理想化的初始状态ꎬ假定磁体AꎬB均位于体轴上ꎬlA=0.4mꎬlB=0.6mꎬ磁体间距l0=lA+lB=1.0mꎬ翼段初始俯仰角θ0=0ꎬ则有yA0=yB0=0ꎬχA=pꎬχB=0ꎬDθ=θꎻ同时假定弹簧初始处于松弛状态ꎬ则F1ꎬt=0=F2ꎬt=0=0ꎮ则式(14)㊁(15)可写为my㊆+k(2y-lBsinθ+lAsinθ)=L-mg(16)Iθ㊆+k2(l2B+l2A)sin2θ+ky(lA-lB)cosθ=Mair(17)对于以上弹性系统ꎬ图2给出了电磁弹性力-气动力-惯性力耦合作用下的翼段近地加速非定常分步求解策略ꎮ图2㊀翼段加速过程非定常求解策略Fig.2㊀Unsteadysolutionstrategyforwingacceleration1.2 网格和计算方法翼段近地加速过程的计算域如图3所示ꎮ计算域的入口及出口均采用压力远场边界条件ꎬ并设置在远离翼段10倍弦长距离以外ꎮ时变来流的Mach数为Ma=0~1.5ꎬ压力为1atm(1atm=1.01325ˑ105Pa)㊁温度为288.15Kꎮ翼段和地面满足黏性无滑移绝热边界条件ꎬ地面速度与来流速度一致ꎮ图3㊀计算域及边界条件Fig.3㊀Computationaldomainandboundaryconditions采用重叠网格法模拟翼段近地加速过程中的沉浮和俯仰运动ꎬ流向网格尺度约5mmꎬ近壁面网格以增长率1.18发展25层ꎬ满足y+~1要求ꎮ图4展示了翼段邻域重叠网格ꎬ计算结果表明重叠交界面附近的网格匹配性较好ꎮ采用Fluent密度基隐式求解器开展非定常数值模拟ꎬ湍流模型采用k ̄ωSST模型ꎬ通量采用Roe ̄FDS格式ꎬ流场采用2阶迎风格式求解ꎬ采用CFL=1.5ꎮ在非定常计算中ꎬ时间迭代步长按照Δts=min(Δx/(u+c)ꎬ2πm/k)给定ꎬ其中Dx是流向网格尺度ꎬu是当地水平流动速度ꎬ本文计算统一取Δts=5ˑ10-5sꎮ图4㊀翼段邻域的重叠网格Fig.4㊀OversetgridsaroundtheNACA0012wing为了考察网格无关性ꎬ对来流Mach数Ma=0.8条件下不同网格尺度下NACA0012翼段定常气动力进行了对比ꎮ其中ꎬ较稀疏网格数为1.4ˑ105(流向网格尺度10mm)ꎬ中等尺度网格数为2.7ˑ105(流向网格尺度5mm)ꎬ较密集网格数为1.12ˑ84第1期罗星东ꎬ等:电磁助推翼段加速地面效应及稳定性分析106(流向网格尺度3mm)ꎮ结果表明ꎬ随着网格数量的增加ꎬ阻力㊁升力和力矩均趋于收敛ꎬ本文选取中等尺度网格开展研究ꎮ1.3㊀计算方法验证在跨/超声速阶段ꎬ激波干扰和激波-边界层干扰是典型的地面效应流动特征ꎮ采用Doig风洞实验结果[11]ꎬ对本文数值方法模拟地效的有效性进行了验证ꎮ实验来流条件为Ma=2.4ꎬRe=3.07´105ꎬα=0ʎꎬ地面效应采用固定壁板方式模拟ꎮ在相同条件下开展了数值模拟ꎬ图5给出了数值纹影和子弹表面压力系数分布ꎮ为了更加直观地对比地面效应波系的位置及形态ꎬ这里将数值纹影与实验纹影对称放置ꎮ可见ꎬ数值与实验结果吻合较好ꎬ对激波捕捉的位置相近ꎮ(a)Schlierenphotograph(b)Surfacepressuredistribution图5㊀超声速子弹地面效应的数值与实验对比ꎬMa=2.4Fig.5㊀ComparisonofgroundeffectsofthesupersonicprojectilebetweennumericalandexperimentalresultsꎬMa=2.4进一步地ꎬ采用AGARD提供的NACA0012跨声速简谐振荡实验[24]对非定常数值方法开展了验证ꎮ翼型的振荡形式如下α(t)=α0+αmsin(ωrt)(18)式中ꎬα0为平均来流攻角ꎬαm为振荡幅值ꎬωr为角频率ꎮ图6给出了NACA0012跨声速简谐振荡抬头上仰α=2.34ʎ时刻的数值与实验压力系数分布对比结果ꎮ数值计算获得的压力分布与实验数据吻合良好ꎬ说明本文数值方法对含运动边界的动态俯仰模拟具有较高精度ꎮ图6㊀攻角α=2.34ʎ姿态时翼段压力系数分布Fig.6㊀Pressurecoefficientdistributiononthewingsurfaceꎬα=2.34ʎ2㊀结果与讨论本节首先对二维NACA0012翼段在相对悬浮高度为h/l=0.5下的典型加速地面效应进行研究ꎬ以厘清近地流场㊁翼段姿态和气动载荷的演变规律ꎬ而后考察翼段悬浮高度㊁悬浮刚度㊁悬浮磁体间距3个关键因素对电磁助推加速稳定性的影响ꎮ2.1㊀翼段加速地面效应及气动力特性翼段近地电磁悬浮推进过程中的典型时刻加速流场变化如图7所示ꎮ为了便于分辨各流场中翼段相对初始位置的沉浮位移和姿态ꎬ在图7中标识O点以显示初始时刻翼段质心位置ꎮ由于弹簧振子在初始时刻处于完全松弛状态ꎬ所以也可由沉浮位移判断电磁悬浮力的方向ꎮ同时ꎬ在图7中标识箭头位置和方向以表示压心位置和升力方向ꎬΔxOP/l为质心指向压心的流向距离与弦长的比值ꎬ正值则表示压心在质心右方ꎮ图7表明ꎬ翼段在加速过程中的流场结构和受力特性复杂多变ꎬ根据速域可大致分为4个阶段ꎮ94气体物理2024年㊀第9卷(a)Ma=0.40㊀(b)Ma=0.50㊀(c)Ma=0.60(d)Ma=0.70㊀(e)Ma=0.76㊀(f)Ma=0.80(g)Ma=0.86㊀(h)Ma=0.90㊀(i)Ma=1.00(j)Ma=1.10㊀(k)Ma=1.30㊀(l)Ma=1.50图7㊀NACA0012翼段近地助推加速典型Mach数下流场压力系数云图Fig.7㊀PressurecoefficientdistributionoftheNACA0012wingatrepresentativeMachnumbers第1阶段ꎬ当Maɤ0.60ꎬ上下翼面呈现亚声速流动ꎮ自由空间内上下翼面流动基本对称ꎬ压心位置近似与质心重合ꎬ翼段姿态相对稳定ꎮ而受地面效应影响ꎬ上下翼面流动逐渐出现差异ꎬ下翼面低压区迅速增大ꎬ出现局部超声速区域(图7(c))ꎬ翼段压心前移(向左移动)并受到负升力ꎬ因此翼段下沉并低头ꎮ第2阶段ꎬ当0.60<Maɤ0.76ꎬ上翼面前缘逐渐向跨声速流动过渡并形成局部超声速低压区域ꎻ而下翼面与地面所构造的约束空间类似收缩-扩张型喷管ꎬ当来流在下翼面建立起声速喉道(图7(d))ꎬ流动产生壅塞并产生一系列压缩波向翼段前方传播ꎮ下翼面流动呈现为典型的变截面跨声速流动:亚声速-声速-超声速ꎬ但流动处于过膨胀状态ꎬ恢复激波S1位于翼段下方ꎮ但在电磁斥力及翼段前缘上方超声速低压持续作用下ꎬ翼段快速抬头并上升ꎬ喷管的收缩比减弱ꎬ下翼面流动伴随壅塞-通流状态快速转换(图7(e))ꎮ因此ꎬ下翼面出现壅塞是第1阶段向第2阶段转变的明显判据ꎮ第3阶段ꎬ当0.76ɤMa<0.90ꎬ上翼面保持跨声速流动特点ꎬ以局部超声速低压膨胀区和其后的恢复激波S2为主要特征ꎬ随着来流速度增加ꎬS2逐渐后退ꎬ尾部斜激波S3形成ꎮ在电磁拉力作用下ꎬ翼段开始下降ꎬ下翼面重新建立起壅塞ꎬ与第2阶段壅塞流动不同的是ꎬ此时激波S1已完全退出下翼面ꎬ流动处于完全膨胀状态ꎮ因此壅塞再现是第2阶段向第3阶段转变的判据ꎮ综合第2和第3阶段来看ꎬ流动的非定常特性和壅塞-通流的交05第1期罗星东ꎬ等:电磁助推翼段加速地面效应及稳定性分析替变换引起了翼段的升力方向㊁压心位置和悬浮姿态显著变化ꎬ对其运行稳定性影响明显ꎮ第4阶段ꎬ当0.90ɤMa<1.50ꎬ上翼面呈现出完全超声速流动ꎬ以此为标志流动开始进入第4阶段ꎻ下翼面持续保持壅塞ꎬ处于完全膨胀状态ꎮ当来流处于超声速速域时ꎬ翼段前方压缩波逐渐汇聚成为激波S4并向翼段靠近ꎬ下翼面壅塞流动以前缘脱体正激波为主要特征ꎬ翼段下半部多余流量从翼段前缘溢流口向翼段上半部泄流ꎮ该阶段ꎬ翼段受超声速地面效应影响ꎬ压心位置和悬浮姿态相对稳定ꎬ受到正升力和电磁拉力ꎬ翼段上浮ꎮ与流场分析相对应ꎬ图8给出了加速过程中的翼段质心垂向位移和俯仰角的演变曲线ꎮ可以看出ꎬ在第1阶段ꎬ质心垂向位移和俯仰角曲线较为顺滑ꎮ质心高度不断下降ꎬ最大位移量为-0.1mꎬ翼段连续低头ꎬ最小俯仰角约为-3.8ʎꎮ在第2ꎬ3阶段ꎬ由于气动压心 后移-前移-后移 和升力 负-正 的迅速转变ꎬ该阶段内的质心位移和俯仰角曲线出现明显振荡ꎮ特别地ꎬ对于第2阶段ꎬ在下翼面壅塞消失过程中ꎬ原本宽泛的低压区迅速缩小直至消失(图7(e))ꎬ前缘压力得到恢复ꎬ同时前缘上表面局部超声速低压区开始显现ꎬ这一高一低造成翼段整体抬头趋势较明显ꎮ而当处于第3阶段ꎬ壅塞再现ꎬ随着上翼面恢复激波S2的后退和低压区的扩大ꎬ上下翼面流动特征趋近并相对稳定ꎬ压心始终位于质心附近ꎬ抬头趋势被抑制ꎬ俯仰角和质心位移整体保持平稳振荡ꎮ在第4阶段ꎬ质心位移和俯仰角的平均值先基本不变后略微降低ꎬ曲线的振幅明显减弱但频率明显升高ꎮ进一步地ꎬ对助推加速过程中的翼段气动力/力矩系数进行研究ꎬ其中参考面积为Sreff=1m2ꎮ从图9可以看出ꎬ翼段气动载荷变化规律和图8中姿态变化规律相近ꎬ图8㊀翼段质心位移和俯仰角演变Fig.8㊀Evolutionofcentroiddisplacementandpitchangleofthewing图9㊀翼段气动载荷系数演变Fig.9㊀Evolutionofaerodynamicforcecoefficientsofthewing因此ꎬ亚声速地面效应对翼段运行姿态的影响特点可简要总结为基本无振荡ꎻ跨声速地面效应诱导翼段运行姿态低频大幅振荡ꎻ而超声速地面效应诱导翼段运行姿态高频小幅振荡ꎮ2.2㊀翼段稳定性分析2.2.1㊀气动-电磁弹性系统稳定性讨论通过前述分析发现ꎬ在跨/超声速运行阶段尤其是第2ꎬ3阶段ꎬ流场变化显著ꎬ翼段受到较强的非定常气动载荷冲击ꎬ表现出大幅度周期性振荡ꎬ容易产生稳定性问题ꎮ实际上ꎬ电磁悬浮力可认为是弹性力ꎬ这与传统的气动力-结构弹性力所构成的气动弹性问题类似ꎮ因此ꎬ本节从方程相似角度对悬浮加速运行稳定性进行分析ꎮ无外力干扰下的经典二元翼段弹性体颤振控制方程[34]分别由质心动力学方程和绕动点刚心E的转动方程建立ꎬ可写为m(y㊆E-θ㊆Exa+g)+CyEy +KyEy=L=QyE(19)IEθ㊆E-m(y㊆E+g)xa+CθEθE+KθEθ=Mair-Lxa=QθE(20)式中ꎬ广义坐标yE和θE分别是弹性体刚心的沉浮位移和绕刚心的俯仰角ꎻIE表示绕刚心转动惯量ꎻxa为质心与刚心距离且质心位于刚心后方ꎻCyE和CθE分别为翼段弹性体刚心沉浮和俯仰阻尼系数ꎻMair是对质心的气动力矩ꎻKyE和KθE分别为翼段弹性体沉浮和俯仰刚度系数ꎻ两式等号右边QyE和QθE分别对应刚心气动升力和刚心气动力矩ꎮ相较之下ꎬ虽然本文所考察的电磁弹性力-气动力系统(式(16)~(17))暂不考虑结构弹性和结构阻尼ꎬ即已略去与xa和结构阻尼有关的量ꎬ但由于有电磁外部力的约束且不显含广义坐标θꎬ也具有一定复杂度ꎮ特别地ꎬ在小攻角振荡假设下ꎬ式15气体物理2024年㊀第9卷(16)~(17)可改写为m(y㊆+g)+2ky+k(lA-lB)θ=L(21)Iθ㊆+k(l2A+l2B)θ=Mair-k(lA-lB)y(22)将式(19)~(20)与式(21)~(22)对比ꎬ不难发现ꎬ由电磁弹性力-气动力耦合模型推导出的弹性动力学控制方程与经典气动弹性控制方程形式类似ꎮ主导电磁悬浮近地加速系统的不稳定性因素主要存在3项ꎮ一是悬浮高度hꎬ该项直接影响地面效应和相关气动载荷ꎬ即方程等号右边的升力项L和力矩项Mairꎮ二是悬浮刚度kꎬ其直接影响了系统的刚度ꎮ三是悬浮磁体间距ꎬ由lA和lB决定ꎮ以下分别对悬浮高度㊁悬浮刚度和磁体间距对系统稳定性的影响开展研究ꎮ2.2.2㊀悬浮高度对系统稳定性的影响控制磁体间距和悬浮刚度不变ꎬ研究了不同初始相对悬浮高度h/l=0.5ꎬ1.0ꎬ1.5对系统稳定性的影响ꎮ图10给出了不同相对悬浮高度下翼段近地加速过程中质心位移和俯仰角演变曲线ꎮ可以看到ꎬ当增加悬浮高度ꎬ由于下翼面阻塞度减小ꎬ流动产生壅塞所需的Mach数增加ꎬ地面效应减弱ꎬ因此第1阶段向第2阶段的转变Mach数明显延后ꎬ但质心位移和俯仰角曲线的振荡幅度在不同悬浮高度下仍基本一致ꎮ此外ꎬ不同悬浮高度下ꎬ第3阶段向第4阶段转变的阈值基本不变ꎮ这主要是由于第3向第4阶段转变的标志是恢复激波S2退出上翼面ꎬ而不同离地悬浮高度下上翼面流动特征基本一致ꎮ(a)Centroiddisplacement㊀㊀㊀(b)Pitchangle图10㊀不同悬浮高度下翼段加速质心位移和俯仰角演变Fig.10㊀Evolutionofcentroiddisplacementandpitchangleofthewingatdifferentsuspensionheights上述结果表明ꎬ增加悬浮高度能够缩短跨/超声速地面效应气动激励的作用时间ꎮ并且ꎬ翼段在第4阶段的质心垂向高度下降更快ꎬ俯仰角曲线振荡的平均值基本趋于0ʎ攻角ꎬ但振幅略有增加ꎮ从系统稳定性来看ꎬ适当增加悬浮高度有利于减弱地面效应ꎬ从而提高系统稳定性ꎮ但考虑到工程可实现性ꎬ悬浮高度的可调节范围受诸多限制ꎬ对于实际工程应做进一步讨论ꎮ2.2.3㊀悬浮刚度对系统稳定性的影响控制悬浮高度和磁体间距不变ꎬ通过在悬浮刚度k0基准上依次扩大10倍和50倍ꎬ研究不同悬浮刚度下的系统稳定性ꎮ图11给出了悬浮刚度k=k0ꎬ10k0ꎬ50k0下翼段近地加速过程中质心位移和俯仰角演变曲线ꎮ图11表明ꎬ当增加悬浮刚度至10k0ꎬ50k0时ꎬ在加速前期阶段ꎬ翼段的质心沉浮位移和俯仰角的振荡幅度能够被有效抑制ꎬ位移振荡范围均限制在ʃ10mm区间ꎮ但较大的悬浮刚度反而导致翼段更高频的振荡ꎬ直至发散ꎬ其中俯仰角最大值约40ʎꎬ远远超过失速迎角ꎬ严重破坏了系统稳定性ꎮ并且ꎬ悬浮刚度50k0相比10k0工况的发散更加提前ꎬ出现在亚声速域ꎮ(a)Centroiddisplacement25第1期罗星东ꎬ等:电磁助推翼段加速地面效应及稳定性分析(b)Pitchangle图11㊀不同悬浮刚度下翼段加速质心位移和俯仰角演变Fig.11㊀Evolutionofcentroiddisplacementandpitchangleofthewingatdifferentsuspensionstiffness为解释系统发散现象ꎬ进一步地ꎬ对不同悬浮刚度下翼段加速过程中的沉浮位移和俯仰角进行时频分析ꎮ图12给出了加速过程中各频率翼段沉浮及俯仰运动随Mach数变化的能量分布ꎮ其中ꎬ红色区域表征翼段运动能量集中频率ꎬ红色长虚线和短虚线分别表示无气动激励下翼段自由振荡的1阶及2阶固有频率ꎮ可见ꎬ当悬浮刚度为k0时ꎬ翼段沉浮与俯仰运动的频率均偏离自由振荡系统固有频率ꎮ翼段的运动主要受到气动力/力矩周期性脉动激励ꎮ随着Mach数增大ꎬ气动激励由亚声速阶段的简单低频激励(约1Hz)发展为跨声速阶段的复杂低频激励(1Hz与8Hz共存)ꎻ在超声速阶段ꎬ激励频率进一步升高ꎬ并引发系统以高于2阶固有频率的振动(20Hz左右)ꎮ当悬浮刚度增大至10k0时系统悬浮刚度加强ꎬ悬浮力足以克服亚跨声速阶段的气动激励ꎬ但随着固有频率升高ꎬ气动激励与系统2阶模态发生耦合ꎬ加之悬浮系统阻尼不足ꎬ诱发系统以2阶特征频率发生颤振式的不稳定振动ꎮ当悬浮刚度增大至50k0时ꎬ系统1阶与2阶固有频率进一步升高并趋近ꎬ气动激励同时与1阶㊁2阶模态发生耦合ꎬ从而诱发系统提前在Ma=0.8时发生不稳定振动ꎮ从另一方面讲ꎬ若减小电磁助推加速的目标速度至系统发散前(如Ma=1.2)ꎬ限定系统悬浮刚度k0<k<10k0ꎬ则在该范围内增加悬浮刚度能够显著减弱系统振荡幅度ꎬ提高系统稳定性ꎮ2.2.4 悬浮磁体间距对系统稳定性的影响控制悬浮高度和悬浮刚度不变ꎬ进而研究不同悬浮磁体间距下(lm=lA+lB=0.5l0ꎬ1.0l0ꎬ2.0l0)的系统稳定性ꎮ式(16)~(17)表明ꎬ增加磁体的前后纵向间距ꎬ可以增大电磁悬浮力的力臂ꎬ从而增加系统的俯仰刚度ꎮ图13给出了不同磁体间距下翼段近地加速过程中质心位移和俯仰角演变曲线ꎮ结果表明ꎬ增加悬浮磁体间距ꎬ能够大幅抑制加速过程中的质心沉浮位移和俯仰角的振荡幅度ꎬ但翼段在第4阶段的振荡频率略有升高ꎮ减小悬浮磁体间距ꎬ翼段出现明显沉浮和俯仰振荡的速域提前ꎬ并表现为低频大幅振荡ꎮ(a)k=k0(b)k=10k035。
空间环境辐射对微波集成电路的影响及其地面模拟实验

空间环境辐射对微波集成电路的影响及其地面模拟实验空间环境辐射对微波集成电路的影响及其地面模拟实验摘要:随着空间科学技术的发展,空间环境辐射对微波集成电路的影响变得越来越重要。
本文首先介绍了空间环境辐射对微波集成电路的危害,包括电离辐射损伤、非电离辐射损伤和电磁辐射敏感性等。
然后,介绍了地面模拟实验对空间环境辐射的研究方法和手段,包括基于粒子加速器的辐射测试和电磁波辐射测试。
最后,讨论了地面模拟实验在空间环境辐射研究中的重要性和应用前景。
1. 引言随着人类对宇宙的探索越来越深入,空间科学技术也取得了巨大的发展。
然而,空间环境对于航天器和人类活动都存在着一定的危害,其中之一就是辐射。
空间环境辐射不仅对航天器的正常运行造成一定的影响,还对其中的微波集成电路产生一系列不利影响。
2. 空间环境辐射对微波集成电路的影响2.1 电离辐射损伤电离辐射是指带电粒子(如高能质子、电子等)与微波集成电路中的原子和分子发生碰撞,从而改变其原子和分子结构的过程。
这种辐射会导致微波集成电路中的有源元件(例如晶体管)受损,从而造成电路性能的不稳定甚至失效。
2.2 非电离辐射损伤非电离辐射是指电磁波(如X射线、γ射线等)与微波集成电路中的原子和分子相互作用,但不会引起电离的过程。
这种辐射会引起电子和空穴在半导体器件中的非平衡性,进而导致器件性能的不稳定以及噪声产生等问题。
2.3 电磁辐射敏感性外部电磁辐射对于微波集成电路的敏感性也是一个重要的问题。
电磁辐射可以通过电路元器件之间的相互干扰,导致电路的性能下降,甚至产生误操作。
3. 地面模拟实验对空间环境辐射的研究方法和手段为了了解和研究空间环境辐射对微波集成电路的影响,一种常用的方法是进行地面模拟实验。
地面模拟实验通过模拟空间环境的辐射条件,可以对微波集成电路的辐射响应进行精确的测量和分析。
3.1 基于粒子加速器的辐射测试粒子加速器是一种能够产生高能粒子束的实验设备,可以模拟空间电离辐射对于微波集成电路的影响。
空间科学实验仪器通用地面检测仪设计
可重复配置的特点 , 用于模拟 星上主控 平台,实现空间科学实验仪器在发射前的地面检测 。 合工程实例对系统性能进 行验证 , 可 结 结果表
明 ,该系统能满足多数情况下的地面检测需求 。
关键词 :空 间科学实验仪器 ;地面检测仪 ;# /sI系统 ;任务调度 ;总线接 I co — I : 1
第 3 卷 第 2 期 7 1
V0 . 7 13 NO. 21
计
算
机
工
程
21 年 1 01 1月
No e e 2 1 v mb r 01
Co utrEn i e rng mp e g n e i
・ 工程应用技术与实现 ・
文 号 1 0.2(12 2 文 标 码: 章编 : 0 —3 8 0 ) — 2 — 4 o 4 2 11 8 献 识 A
gvnb rjcts . ie ypoetet s
[ e o d lsae c n e x e met su etg u d npc r ̄ / sⅡss m; s h d l b sne ae K y r s p c i c pr n i t m n; r n set ; co 一 yt t k c eu ; u t c w se e i r n o i o e a s e i r f
电磁屏蔽设备在航空航天领域的应用与发展
电磁屏蔽设备在航空航天领域的应用与发展随着现代科技的不断发展,电磁屏蔽设备在航空航天领域中的应用日益广泛。
航空航天领域对电磁屏蔽设备的需求主要集中在两个方面:一是航空器和航天器的电磁兼容性,二是地面测试设备的电磁屏蔽。
首先谈一下航空器和航天器的电磁兼容性。
航空航天器中涉及到的各种电子设备,如通信系统、导航系统、雷达系统等,都需要相互协调工作,而不受电磁辐射的干扰。
由于航空航天器通常在恶劣的环境条件下运行,如高温、低温、高空气压等,这些环境会对电磁屏蔽设备的性能产生一定的影响。
因此,航空航天领域对电磁屏蔽设备的要求非常高,不仅需要能有效屏蔽电磁辐射,还需要抵御恶劣环境的影响,确保设备的稳定性和可靠性。
为了满足航空航天器对电磁兼容性的要求,研发了许多先进的电磁屏蔽技术和设备。
其中一项重要技术就是使用金属材料制作电磁屏蔽罩。
电磁屏蔽罩能够有效地阻挡电磁辐射的传播,从而减少设备之间的干扰。
通过合理设计和优化材料选择,电磁屏蔽罩可以在较小的体积和重量下达到较高的屏蔽效果。
此外,还可以利用电磁屏蔽材料制作电磁屏蔽窗、电磁屏蔽座椅等,在航空航天器中进行有效的电磁屏蔽措施。
除了航空航天器本身的电磁兼容性,地面测试设备的电磁屏蔽也是航空航天领域中的重要方面。
在航空航天器的研发和制造过程中,需要进行各种地面测试,如电子设备的性能测试、系统集成测试等。
然而,地面测试中的电磁辐射可能会对航空航天器的正常工作造成干扰,因此需要在测试设备中加入电磁屏蔽措施,确保测试准确可靠。
电磁屏蔽设备在地面测试设备中的应用主要包括电磁屏蔽房、电磁屏蔽箱等。
这些设备能够有效地屏蔽外部的电磁辐射,保障测试结果的可信度。
随着航空航天技术的不断发展和进步,电磁屏蔽设备在航空航天领域的应用也将继续发展。
一方面,航空航天器的电子设备日益复杂,需要更高效的电磁屏蔽措施来确保正常工作。
另一方面,航空航天器的工作环境也变得越来越恶劣,对电磁屏蔽设备的要求越来越高。
空间环境地面模拟装置研究现状与发展趋势
空间环境地面模拟装置研究现状与发展趋势空间环境地面模拟装置是用于模拟太空环境条件的实验设备,主要用于地面测试和验证航天器的性能、耐久性、可靠性和适应性。
随着航天技术的不断发展和进步,空间环境地面模拟装置的研究也得到了广泛关注和研究。
本文将介绍目前空间环境地面模拟装置的研究现状和未来的发展趋势。
目前,空间环境地面模拟装置主要包括热真空模拟装置、高低温试验装置、振动试验装置、辐射试验装置和电磁兼容性试验装置等。
这些装置可以模拟和测试太空中的各种环境因素,如真空、高低温、振动、辐射和电磁辐射等,为航天器的研发和测试提供了可靠的支持。
在热真空模拟装置方面,目前主要应用的方法是通过机械或电学手段来模拟太空中的真空环境。
传统的真空模拟装置主要通过抽气泵将空气抽空来达到真空的目的。
但是这种方法存在能耗高、仪器复杂等问题。
近年来,随着触发机理的发展和新材料的应用,膜真空技术得到了广泛应用。
膜真空技术是一种通过特殊材料的多孔性膜来实现真空的新技术,具有能耗低、装置简单等优点,已经成为热真空模拟装置的研究热点。
在高低温试验装置方面,目前主要应用的方法是通过加热或制冷装置来模拟太空中的高低温环境。
加热设备通常是采用电加热或辐射加热方式,而制冷设备主要是通过制冷剂进行制冷。
现代高低温试验装置不仅能模拟太空中的高低温环境,还可以实现温度梯度和温度变化率的调节,以更好地模拟实际的太空环境。
在振动试验装置方面,目前主要应用的方法是通过机械或电学手段模拟太空中的振动环境。
机械振动试验装置通常通过电机和惯性体来产生振动力,而电学振动试验装置则是通过利用声波、超声波或电磁力来产生振动力。
振动试验装置可以模拟航天器在发射、升空和运行过程中的各种振动环境,以检验航天器结构的强度和抗振能力。
在辐射试验装置方面,目前主要应用的方法是通过射线源来模拟太空中的辐射环境。
常用的射线源包括γ射线源、X射线源、电子加速器等。
辐射试验装置可以模拟太空中的辐射环境,对航天器的电子元器件和材料进行辐射耐性和辐射效应的研究,从而提高航天器在太空中的可靠性。
电磁波在航天探测领域的应用研究
电磁波在航天探测领域的应用研究引言:航天探测是现代科学技术的重要领域,在实现人类对宇宙的探索和资源利用上具有极为重要的意义。
而电磁波作为物理学和工程学中的重要概念,在航天探测领域也发挥着举足轻重的作用。
本文将从电磁波的基本定律开始,深入探讨其在航天探测领域的应用研究,包括实验准备、过程和应用,以期展示出电磁波在航天探测领域的重要性和潜力。
第一部分:电磁波的基本定律电磁波由电场和磁场的振荡相互耦合而成。
麦克斯韦方程组是描述电磁波行为的基本定律,其中包括电场定律、磁场定律、法拉第电磁感应定律和安培环路定律。
这些定律不仅揭示了电磁波的本质,也为我们研究和应用电磁波提供了基础。
第二部分:电磁波在航天探测领域的应用研究1. 电磁波通信技术航天器与地面之间的通信是航天探测领域中最常见、最重要的应用之一。
利用电磁波的特性,我们可以实现遥感数据的传输、实时对航天器进行数据和指令的通信等。
在实验准备阶段,我们需要设计和制造合适的通信设备,确保其在航天探测环境中的稳定运行。
实际的通信过程中,我们需要考虑电磁波的传播特性、信号的传输和接收等,保证通信信号的稳定性和可靠性。
2. 电磁波遥感技术电磁波遥感技术是航天探测领域中另一个重要的应用研究方向。
通过利用电磁波在地球及其大气中的相互作用过程,可以获取地质、大气、海洋等信息,进而对地球环境进行监测和分析。
在实验准备过程中,我们需要选择合适的遥感仪器,包括不同波段的探测器、辐射源等,并进行相应的测试和校准工作。
在实际遥感过程中,我们需要计算和处理电磁波与地球物体之间的相互作用过程,实现对目标区域的探测和监测。
3. 电磁波导航和定位技术电磁波导航和定位技术在航天探测领域中起到关键作用。
通过利用电磁波的传输和反射特性,我们可以实现卫星导航和定位系统,如全球定位系统(GPS)等。
在实验准备中,我们需要设计和制造合适的导航和定位设备,确保其对电磁波信号的接收和处理能力。
在实际导航和定位过程中,我们需要运用电磁波的传播和反射规律,精确计算和处理导航信号,实现对目标位置的定位和跟踪。
空间科学实验的技术与方法研究
空间科学实验的技术与方法研究当我们仰望星空,心中总会涌起对宇宙无尽的好奇与向往。
而空间科学实验,正是我们探索宇宙奥秘的重要手段。
从研究天体的物理特性到探索生命在太空环境中的生存可能,空间科学实验涵盖了众多领域,其背后所依赖的技术与方法也在不断发展和创新。
首先,让我们来谈谈空间科学实验中的关键技术之一——航天器技术。
航天器是将实验设备和仪器送入太空的载体,其性能和可靠性直接决定了实验的成败。
为了适应太空的极端环境,航天器需要具备高度的稳定性、精确的姿态控制能力以及强大的能源供应系统。
例如,在卫星的设计中,要考虑到太空辐射、微流星体撞击等因素对其结构和电子设备的影响,采用特殊的防护材料和加固措施。
同时,为了实现对航天器的精确操控,先进的姿态测量和控制技术必不可少,这包括高精度的陀螺仪、星敏感器等设备以及复杂的控制算法。
实验设备和仪器的研发也是空间科学实验的重要环节。
由于太空环境与地球表面有很大的差异,许多在地面上常见的实验设备在太空中可能无法正常工作。
例如,在微重力条件下,液体的流动和传热特性会发生改变,这就要求对涉及流体的实验设备进行重新设计。
此外,太空辐射可能会对电子设备造成干扰和损伤,因此需要采用抗辐射的电子元件和防护措施。
为了获取更精确的科学数据,仪器的灵敏度和分辨率也需要不断提高。
比如,在天文观测中,高性能的望远镜和探测器能够捕捉到更微弱的天体信号,为我们揭示宇宙的更多秘密。
数据传输和通信技术在空间科学实验中也起着至关重要的作用。
由于航天器与地面之间的距离遥远,信号传输存在较大的延迟和衰减。
为了确保实验数据能够及时、准确地传输回地面,需要采用高效的编码和调制技术,以及强大的地面接收站和通信网络。
同时,为了应对可能出现的通信故障,航天器上通常会配备一定的存储设备,以便在通信恢复后将数据补发回地面。
除了硬件技术,实验方法的创新也是推动空间科学发展的重要因素。
在太空环境中进行实验,往往面临着样本有限、操作困难等挑战。
新型航天器的研制与试验
新型航天器的研制与试验一、航天器的发展及分类航天器是指利用火箭技术使人造物体进入地球以外的空间,它从最早的人造卫星到今天的空间站都是以人类科技力量向宇宙的探索为动力,现代的航天器已分为地球观测、中小型多用途卫星、通信卫星、气象卫星、导航卫星、遥感卫星、空间探测器、空间站等多种类型。
二、新型航天器的研制航天器的研制需要先进行充分的理论探索和技术储备。
在进行新型航天器的研制之前,需要进行飞行动力学和推进技术、控制与制导、导航与信息等方面的理论研究。
在理论研究的基础上,才能对航天器舱体结构、材料及航天器关键技术进行探索与研究。
航天器的研制不仅仅是单纯的技术问题,还需要高超的科学智慧和集体智慧。
要研制出最新科技的航天器,必须要团队合作,实现多学科交叉合作和人才的资源整合,使研究工作更具发展潜力和创新意义。
同时,多级任务和多轮循序渐进的试验是航天器研制的必要过程。
三、新型航天器的试验在航天器试飞之前,还需要进行模拟和模型试验。
模拟试验通过数学仿真现象的数据来验证与评估空间运动的功效及其可能存在的缺陷,完善预先制定的设计方案。
模型试验则是在实验室使用缩小的模型进行的,用来模拟真实的空间环境,评估测试的实际效果。
在验证模拟和模型试验有效性之后,才开始进行实际试验。
实际试验是航天器研发的一个非常重要的环节,它直接影响最终产品成果的质量。
为了确保正式试验可以稳定进行,需要经历多次前置试验,每次试验包括开发测试、评估测试和验证测试,以确保测试方案得以完善并稳步推进。
在正式试飞前还必须进行一系列的地面试验,包括热处理试验、放射性测试、紫外线测试、振动测试、电磁兼容测试等。
四、结语随着人类对宇宙的探索越来越深入,要求航天器具备越来越多的功能,因此航天器的发展也必须不断创新。
为了使航天器更加高效、安全、先进和可靠,必须加强航天器的研制和试验相关工作。
同时,必须注重科技智慧的集成和人才资源的整合,激发团队合作的高度能量,共同推动航天器研究和试验工作的进步。
航天器大型地面试验质量控制方法
文章编号:2095-6835(2021)06-0004-04航天器大型地面试验质量控制方法路彤1,2,张军1,2,刘文根1,2,李树鹏1,2,张禹森1,何韦1(1.北京卫星环境工程研究所,北京100094;2.航天机电产品环境可靠性试验技术北京市重点实验室,北京100094)摘要:描述了航天器大型地面试验的定义及分类,分析了开展航天器大型地面试验的意义及不可替代性,以大型地面试验的典型案例——系统级真空热试验为例详述了大型地面试验的步骤及各环节质量控制方法,最后通过分析大型地面试验质量管控方面存在的主要问题,给出了大型地面试验质量管控措施的建议,以期望能通过质量措施的改进,提高工作效率,提升过程质量控制水平。
关键词:航天器;大型地面试验;热试验;质量控制中图分类号:V416文献标志码:A DOI:10.15913/ki.kjycx.2021.06.0021航天器大型地面试验1.1大型地面试验定义及分类为确保航天发射的成功,航天器及其组件在发射或装机前需要完成一系列的试验,以验证航天器在轨及发射过程中的环境适应能力。
航天器按照装配类别分为器件及材料级、单机及组件级、分系统级、系统级[1]。
大型试验是指航天器系统级的各类试验,也包括具有技术难度大、风险性大、试验周期长、接口关系多、耗资大的部分或全部特点的分系统级试验。
大型地面环境试验属于大型、复杂环境试验,也是地面必做的试验项目之一,试验代价高昂,一般持续超过20d,准备周期更长,复杂的环境试验可达半年甚至更久。
作为对航天器产品进行设计验证、性能验证和质量验证的一项重要手段,试验和测试贯穿于航天器的整个研制过程,卫星试验和测试按研制技术流程,一般有:质量特性测试、模态试验、电性能测试、力学试验、EMC测试、磁测试、热平衡及热真空试验、模飞试验等系统级大型试验[2]。
针对卫星试验项目多、过程周期长的特点,卫星试验前检查和现场控制应为大型地面试验整个环节质量控制的重点。
航天器空间环境下电磁特性研究与优化
航天器空间环境下电磁特性研究与优化航天器的电磁特性是指在航天器所处的空间环境下,其所表现出来的电磁行为。
在航天器的设计和使用过程中,电磁特性是一个非常重要的考虑因素。
因为航天器所处的环境与地球上的环境有着很大的不同,这就需要对航天器的电磁特性进行深入的研究和优化。
首先,航天器在太空中所处的环境与地球上的环境有着很大的不同。
太空中存在着各种辐射,如高能粒子、太阳风、宇宙射线等,这些辐射会对航天器产生很大的影响。
例如,高能粒子会对航天器的电子设备产生辐射损伤,导致设备失效,太阳风则会对航天器的电池充电系统产生影响,降低电池的寿命等等。
因此,在设计航天器时,需要考虑到这些辐射的影响,并采取相应的措施来保护航天器。
其次,航天器的电磁特性还与其所搭载的设备和任务有关。
例如,在进行通信任务时,需要保证航天器的天线能够有效地接收和发送信号,同时还需要避免信号干扰。
在进行科学实验时,需要保证航天器的仪器能够准确地测量和记录数据,同时也需要避免辐射干扰。
因此,在设计和选择航天器所搭载的设备时,需要考虑到其电磁特性,并进行相应的优化。
最后,航天器的电磁特性还与其所处的轨道有关。
例如,在地球轨道上运行的航天器需要考虑到地球磁场和大气层对其电磁特性的影响,而在其他行星或卫星轨道上运行的航天器则需要考虑到该行星或卫星所具有的磁场和辐射环境对其电磁特性的影响。
因此,在进行航天任务时,需要根据不同的轨道特点来优化航天器的电磁特性。
总之,航天器空间环境下的电磁特性是一个非常复杂和重要的问题。
在设计和使用航天器时,需要充分考虑到其电磁特性,并进行相应的研究和优化,以保证其能够顺利地完成各种任务。
电磁学在航天器电磁兼容性测试中的应用研究
电磁学在航天器电磁兼容性测试中的应用研究引言:航天器的电磁兼容性测试是确保其电子设备在各种电磁环境下正常运行的重要环节。
电磁兼容性测试的目的是检测和评估航天器内部各种电子设备之间的电磁兼容性,以及航天器与外部电磁环境之间的相互影响。
本文将探讨电磁学在航天器电磁兼容性测试中的应用研究。
电磁兼容性测试的背景:航天器在执行任务时,会受到各种电磁干扰,例如来自雷达、通信设备、电磁辐射等。
这些干扰可能会对航天器内部的电子设备造成不同程度的影响,甚至导致设备故障。
因此,为了确保航天器的正常运行和任务的成功执行,必须对其进行电磁兼容性测试。
电磁兼容性测试的方法:电磁兼容性测试主要分为三个方面:辐射干扰测试、传导干扰测试和敏感度测试。
辐射干扰测试是通过模拟外部电磁环境,检测航天器内部电子设备对外部电磁辐射的敏感程度。
传导干扰测试是通过模拟内部电子设备之间的电磁干扰,评估其对其他设备的影响。
敏感度测试是检测航天器内部电子设备对外部电磁干扰的敏感程度。
电磁兼容性测试的关键技术:电磁兼容性测试涉及到多个关键技术,其中包括电磁场测量技术、电磁辐射防护技术、电磁兼容性分析技术等。
电磁场测量技术是电磁兼容性测试的基础,通过测量电磁场的强度、频率和方向等参数,可以评估航天器内部电子设备受到的电磁干扰程度。
电磁辐射防护技术是为了减少外部电磁辐射对航天器内部电子设备的影响而采取的一系列措施,例如屏蔽、隔离、滤波等。
电磁兼容性分析技术是通过建立电磁兼容性模型,分析和评估航天器内部各种电子设备之间的电磁兼容性。
电磁兼容性测试的挑战:航天器的电磁兼容性测试面临着一些挑战。
首先,航天器的电子设备种类繁多,每个设备的工作原理和敏感程度都不同,因此需要针对不同设备进行不同的测试和评估。
其次,航天器的电磁环境复杂多变,包括地面测试环境和太空环境,需要对不同环境下的电磁兼容性进行全面考虑。
此外,航天器的电磁兼容性测试需要满足一定的时间和成本限制,因此需要寻找高效和经济的测试方法和手段。
电磁辐射在航天技术中的应用
电磁辐射在航天技术中的应用电磁辐射在航天技术中发挥着重要的作用。
航天技术的发展需要借助电磁辐射以实现通信、导航、传感和科学实验等多种功能。
本文将探讨电磁辐射在航天技术中的应用,并分析其对航天事业的重要意义。
一、通信应用电磁辐射在航天通信中起着至关重要的作用。
无线电波是一种电磁波,可通过空间传播。
航天器通过发射无线电波进行与地面站点的通信,实现指令传输和数据接收。
航天器上的天线接收来自地面的指令信号,并发送回数据信号,以便地面工程师可以实时了解航天器的状态和执行任务。
二、导航应用电磁辐射还在航天导航中起到关键作用。
卫星导航系统如全球定位系统(GPS)利用卫星发送电磁信号,以确定用户的位置、速度和时间。
通过接收来自多颗卫星的信号并进行精确计算,可以在全球任何地点提供高精度的导航和定位服务。
航天器可以通过接收这些电磁信号来确定自身的位置和速度,从而进行精确的导航。
三、传感应用航天器利用电磁辐射传感器获取各种信息。
遥感卫星通过接收地球表面反射、散射的电磁辐射,可以获取地球表面的大量信息。
这些信息包括地表温度、植被分布、水域覆盖等,对于农业、气象和环境监测等领域具有重要意义。
此外,航天器还可以利用电磁辐射传感器观测星际空间的电磁波,如射电波、X射线和γ射线等,帮助科学家研究宇宙的奥秘。
四、科学实验应用电磁辐射在航天科学实验中扮演重要角色。
航天器上搭载各种仪器和设备,如望远镜、探测器等,利用电磁辐射开展科学实验。
例如,太阳观测卫星通过观测太阳的电磁辐射,研究太阳活动的规律和变化。
天文卫星可以通过观测遥远星系的电磁波,了解宇宙的形成和演化。
这些实验为我们深入了解宇宙、地球和生命的起源提供了宝贵的数据。
总结起来,电磁辐射在航天技术中具有广泛应用。
通信、导航、传感和科学实验等领域都离不开电磁辐射的支持。
电磁辐射的应用为航天器的功能发挥提供了关键技术支持,为人类探索宇宙、研究地球提供了有力工具。
在未来,随着航天技术的不断发展,电磁辐射的应用将变得更加广泛和深入,为航天科技的进步发挥重要的推动作用。
电磁辐射与航天科技的关系和在航天器设计中的应用
电磁辐射与航天科技的关系和在航天器设计中的应用航天科技的发展离不开电磁辐射的应用,电磁辐射不仅为航天工程提供了重要的技术支持,还对航天器的设计和研发起到了关键性的作用。
本文将探讨电磁辐射与航天科技的关系,并介绍电磁辐射在航天器设计中的应用。
一、电磁辐射与航天科技的关系电磁辐射是指电磁波在空间中的传播过程,它下有很广泛的频率范围,包括射频、微波、红外线、可见光、紫外线等。
在航天器的通信、控制、遥感等方面,都有广泛的应用。
1. 航天通信与电磁辐射航天器与地面指挥中心之间的通信是航天任务中至关重要的一环。
电磁辐射在航天通信中发挥着重要作用。
射频通信是一种广泛应用于航天器间通信的无线技术,通过地球与航天器之间的电磁波传播来实现信息的传输。
射频通信技术的应用,使得地面指挥中心能够与航天器进行实时的双向通信,提高了航天器的控制和监测能力。
2. 航天探测与电磁辐射航天探测涉及到对地球、其他星球以及宇宙空间的观测和探测。
在航天探测中,电磁辐射有着广泛的应用。
例如,红外线遥感技术利用地面、航天器上的红外传感器,通过感知并分析红外辐射来获取地表或天体的相关信息。
这项技术在航天器探测中发挥着重要作用,可以实现对目标的高精度探测和成像。
二、电磁辐射在航天器设计中的应用电磁辐射在航天器设计中扮演着重要角色,下面将介绍其在航天器设计中的应用场景。
1. 辐射防护设计在航天器的设计过程中,必须考虑与外界环境接触产生的电磁辐射对电子设备和乘员的潜在危害。
为了保护航天器内部设备的正常工作和乘员的健康安全,需要进行辐射防护设计。
通过采用屏蔽材料、优化布局以及合理设计电子设备的互干扰等方式,可以减少电磁辐射对航天器的危害,提高系统的可靠性和稳定性。
2. 电磁兼容性设计航天器中各种电子设备的共同工作会产生互相干扰的问题,这就需要进行电磁兼容性(EMC)设计。
电磁兼容性设计旨在使得各种设备在同一航天器上不产生干扰,确保设备的正常工作。
在航天器设计中,通过优化电子线路的布局、选择合适的滤波器和屏蔽措施,以及进行辐射鉴定和测试等措施,可以有效提高航天器的电磁兼容性。
航空航天工程师的航天器测试与验证
航空航天工程师的航天器测试与验证航空航天工程师是专门从事航空航天领域设计、研发和测试的专业人士。
在航天器的研制过程中,航天工程师需要进行航天器的测试与验证,以确保其能够安全、可靠地执行任务。
本文将探讨航空航天工程师在航天器测试与验证过程中所面临的挑战和应对方法。
一、航天器测试与验证的目的航天器测试与验证是为了评估航天器在真实环境下的性能和可靠性。
通过测试与验证,航天工程师可以检测和修正设计缺陷,提高航天器的安全性和可行性。
同时,测试与验证还可以验证航天器是否满足设计要求和性能指标,为后续的任务提供基础数据和实验验证。
二、航天器测试与验证的步骤1. 测试计划制定:航天工程师需要根据航天器的设计需求和任务目标制定详细的测试计划。
该计划应包含测试的内容、时间表、测试方法和所需资源等。
在制定测试计划时,航天工程师应考虑到不同测试环节的依赖性和测试顺序。
2. 功能测试:这是对航天器各个部件和系统进行的基本功能测试。
通过验证航天器各个系统能否正常工作,航天工程师可以迅速发现可能的故障和问题,并进行修正。
例如,航天工程师可以对推进系统、通信系统和导航系统进行测试,以确保其正常工作。
3. 性能测试:性能测试是对航天器在不同工况下的性能进行验证。
航天器的性能测试通常分为地面测试和空中测试两个阶段。
在地面测试阶段,航天工程师会模拟航天器在真实环境下面临的各种条件,测试其性能表现。
而在空中测试阶段,航天器会被发射到大气层外,并在真实环境中进行各项性能测试。
4. 故障测试:故障测试主要目的是验证航天器在故障情况下的安全性和稳定性。
通过引入故障,观察航天器的反应和应对方式,航天工程师可以对可能的故障情况进行预测和准备。
例如,航天工程师可以模拟电力故障、机械故障或通信故障,测试航天器的应对能力。
5. 飞行试验:飞行试验是航天器测试与验证的最后阶段。
在这个阶段,航天器会被实际发射到太空中执行任务。
通过对航天器的实际飞行监控和数据分析,航天工程师可以验证设计的合理性和性能指标的准确性。
物理实验技术在航天科研中的重要作用
物理实验技术在航天科研中的重要作用导语: 航天科研是现代物理学领域中最具挑战性和复杂性的研究方向之一。
物理实验技术的运用对于航天科研的发展起着至关重要的作用。
1. 航天器的设计与测试在航天科研中,物理实验技术的应用广泛涉及到航天器的设计与测试。
物理学原理和实验技术的结合应用,为航天器的发射、运行和返回过程提供了有力的支持。
首先,物理实验技术在航天器的结构设计和材料选择中起到了关键作用。
通过实验技术,科研人员可以对航天器的物理性能进行准确测量和分析,以评估其结构的稳定性和耐受力。
例如,通过使用材料的拉伸实验技术,科研人员可以确定航天器的材料拉伸应力极限,并选择适合的材料以保证航天器在高速飞行中的结构稳定性。
其次,物理实验技术在航天器的热力学处理和热防护方面具有重要作用。
航天器在离开地球大气层时会受到极高温度的影响,严重影响其结构与材料的稳定性。
通过物理实验技术,研究人员可以模拟航天器在高温环境下的表现,并研发相应的热防护材料和解决方案,确保航天器在极端条件下的正常运行和安全返回。
2. 航天与大气层物理的研究除了航天器的设计与测试,物理实验技术在航天与大气层物理研究中也发挥着重要作用。
航天科研涉及到对空间环境、大气层和行星的认识与研究,而物理实验技术则可以提供对这些物理过程的实验验证。
例如,航天器的雷达技术可以通过向地球、月球或其他类似天体发射电磁波,并根据电磁波以及返回的信号来测量目标物体的距离、速度、形状等信息。
通过物理实验技术,科研人员可以验证和改进雷达技术的准确性和可靠性,进一步探索和研究火星、月球以及其他星球的地理信息和岩石构成。
物理实验技术还可以用于研究地球大气层和气候变化。
通过气象观测站、气球和卫星传感器等设备,科研人员可以捕捉各种气象数据,并通过实验验证真实的气候变化模型和天气预测模型。
这些实验技术为了解地球的气候系统和洞察全球变暖等重大气候问题提供了基础。
3. 远程通信与定位技术在航天科研中,物理实验技术在远程通信与定位技术的应用上起着重要作用。
太空中的落体实验

维普资讯
博览
的力至少比引力还要小十万亿倍 ( 后面 1
1 3个 “ ” 。 O )
就像 磁力只对 铁质物体起作 用一样 , 这种 新 的力不 会对 所有 物 体起 相 同的 作
用 。这种新的引力作用将根据物质组成的
不同而不 同。
例 如 ,弦理 论认为 ,这种 新的力与物
质中的电磁能相互作用 。两个具有同样质 量的原子 ,如果其中一个质子较多从而带 上电荷 ,而 另一个中子较多呈 电中性 ,那 么它们就具有不同的电磁能 。通常的引力
对这两个原子 的作用完全相 同, 然而如果 引力中还包含 了这种新 的力 , 么作用在
一
《 太空探索》2 0 0 7年第 1 0期 ・ 7 2
同 ,S E T P计划使用四对实 验物体 。之所
莱 ( l oGai i Gai l )卫星 ,简 称 “ l e l e GG” , 检 验卫 星” ( EP ST )的项 目 。S EP将 以要用四对实验物体 的原因是为 了确保 观 T 测到的物体下落快慢 的不同是由等效原理 它除了仅仅使用一对实验物体之外 ,几乎 有 可 能探测 到等 效原 理中 一百亿 亿分 之 的破坏所引起的 ,而不 是由于其它因素的 与 S E T P和 MI OS CR COP E完 全 一样 。为 干扰或者是实验仪器的缺陷所造成的 。 了提高精度 ,GG卫星将以 05秒为周期 , “ 当你 想要测量 这样一个微小 的效应 绕它的中心轴旋转 。这样一来 ,相当于把 于 时, 你就必须尽可能地减小任何来自外界 航天器中的 扰动分布到 了各个 方向上 , 的干 扰 , 尔解释说 。 T P把实验物体 是它们可以彼此抵消 。因此虽然 GG卫星 ”威 S E 但是它 的灵敏度 放在 了一个大 的液 态氦 箱中 , 这样可以使 仅仅使用 一对实验质 量 , 得 它 们 免 受 外 部温 度 涨落 的 干 扰 。再 用 一 却 能达 十亿 亿分之 一。 个超导壳层包住实验物体 , 这样可 以屏蔽
高轨卫星接地设计
高轨卫星接地设计接地是电路系统正常工作的基本要求之一,也是决定电路系统EMC性能高低的关键因素。
卫星运行在高轨道空间环境中,地球外辐射带(3~7倍Re,Re为地球半径)中俘获了大量的电子。
其中,能量位于0.1~10 MeV范围内的高能电子具有很强的穿透能力,它们可以穿透卫星表面敷层进入卫星构件的介质材料中,从而产生充电效应。
当介质深层充电产生的电场超过介质材料的击穿阈值时,就会发生放电。
因此,卫星表面和内部存在严重的充放电效应和内带电效应,所产生的电磁脉冲会干扰甚至破坏卫星上电子系统的正常运行。
介质深层充电产生的电场除了与电子能谱、介质厚度及屏蔽层厚度有关外,还有一个重要的因素,就是介质构件所采用的接地方式。
因此,良好的接地设计是卫星系统性能稳定、安全可靠的重要保障。
本文介绍了几种卫星上常用的接地方式,分析了国内外卫星接地现状,针对高轨卫星在轨运行环境,详细分析并设计了一种高轨卫星接地方案。
1接地的目的和接地方式1.1接地目的接地設计是卫星设计的必要环节。
卫星接地就是把星上各设备外壳、框架或底座与星体结构或运载搭接起来。
卫星接地设计目的有以下几点:(1)为星上所有电子设备和结构件建立一个基准的公共参考电位;(2)为故障电流提供漏电流通路,使保护电路真正起到保护作用;(3)通过正确的接地设计,使系统内的电磁干扰得到有效的控制;(4)建立静电堆积电荷的泄放通路,确保单机不会受静电影响。
1.2接地方式目前卫星上设备主要有如下几种接地方式:(1)单点接地单点接地指卫星上所有设备的地线均通过导线连接到卫星结构的一点上,即卫星结构地与星上各设备之间只存在唯一的接地路径。
单点接地主要分为图1所示的串联单点接地和图2所示的并联单点接地。
从噪声观点看,串联单点接地容易引入干扰,因任何导线都有电阻,流经导线的电流都会在导线上产生压降,造成相互间共模干扰,故低频设备最好采用并联单点接地方式。
单点接地的最大缺点是,当系统工作频率很高,以致波长小到与系统接地线长度可以比拟时(如达到λ/4时,λ为波长),接地线就好像一根天线,通过它向外辐射电磁波,影响周围设备和电路的工作,在这种情况下,应当考虑采用多点接地。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.航天器地面实验研究现状航天器地面实验作为验证航天器关键技术可行性的关键技术手段一直受到研究人员的重点关注错误!未找到引用源。
-错误!未找到引用源。
可以说航天器地面实验技术是伴随航天器发展同步发展的,早在1959年美国Army Ballistic Missile Agency 成功研制三自由度气浮平台用以模拟空间航天器姿态变化,标志着航天器地面实验成为航天器研制过程中的有效手段,由于该气浮平台最早用于航天器地面实验故其具有里程碑式的重要意义。
目前几乎所有的航天器在发射之前都需要进行大量的地面实验用以确保其任务的顺利完成。
下面将从航天器地面实验发展以及电磁航天器地面实验两方面介绍航天器地面实验的发展。
3.1 航天器地面实验在航天器地面实验的开展过程中,所面临最大的问题为抵消地面实验环境中的重力影响,为此研究人员提出落塔实验、失重飞机实验、气浮平台实验以及液浮平台实验等多种地面实验方法错误!未找到引用源。
下面将分别介绍上述地面实验方法及其在航天器实验中的应用情况。
(1)落塔实验落塔实验通过在微重力塔(井)中执行自由落体运动从而产生微重力实验环境。
目前美国、日本、德国、中国等都建立了自己的落塔实验系统,并纷纷开展了大量的微重力实验用以开展微重力环境下理化科学、材料科学、生命科学等基础学科的研究。
A.美国落塔实验系统美国国家航天局拥有多套落塔、落井实验系统,其中具有代表性的包括路易斯研究中心145m落井以及马歇尔飞行中心的100m微重力落塔。
易斯研究中心145m落井总高度155m,有效实验高度143m,1966年建成。
最初用于太空组件和流体系统在微重力环境下的研究与开发,该落井系统目前依然正在为世界各地的研究服务,并用于开发和测试飞行实物硬件,设计航天飞机或国际空间站等任务。
马歇尔飞行中心的100m微重力落塔总高度101.7m,有效实验高度89m,曾用于开展微重力环境下流体自由液面变化的相关研究错误!未找到引用源。
B.德国落塔系统德国不莱梅应用空间技术和微重力中心(ZARM)建立了Bremen落塔错误!未找到引用源。
,该落塔实验系统总高度157米,有效实验高度110m,自1990年开始投入使用以来开展了大量的微重力物理、化学、生物等方面的研究,并取得了宝贵的实验数据以及落塔实验系统的使用管理经验。
德国FAMEX落塔实验系统在废弃的矿井改造而成,总高度713.5米,有效实验高度600m是目前为止世界上有效实验高度最高的落塔实验系统,1993年开始投入使用,主要进行化学、生物科学、光学以及X射线等许多专业项目的实验。
J.Reimann和S.Will错误!未找到引用源。
利用该落塔实验系统对积灰的燃烧进行了详细的分析研究。
C.日本落塔实验系统日本微重力中心在北海道建立了JAMIC微重力落塔。
该落塔实验系统总高度710米,有效实验高度490米,自1991年建成以来主要进行燃烧、流体物理、空间材料加工等基础研究错误!未找到引用源。
该落塔实验系统最大允许有效实验载荷1000kg,可以进行全系统性的微重力落体实验。
Urban B. D.错误!未找到引用源。
等人利用JAMIC落塔对微重力环境下酒精液滴的燃烧及火焰的扩散特性进行了分析研究。
D.中国落塔实验系统为了加强微重力情况下基础科学的研究,中国在上世纪七十年代开始发展自己的微重力落塔实验系统,较为典型的包括:中国科学院国家微重力实验室落塔系统、北京强度研究所BISE54落塔实验系统以及工程热物理研究所落塔实验系统。
其中中国科学院国家微重力实验室落塔系统总高度93米,有效实验高度60米,自建成以来开展了大量的微重力流体物理、微重力燃烧科学以及微重力材料科学等基础科学的研究错误!未找到引用源。
,为我国的基础研究做出了巨大的贡献。
由于落塔实验微重力精度高,故其在微重力科学的基础研究中获得广泛应用。
但是落塔实验系统实验时间短、实验空间受限等缺点制约了其在航天器实验中的使用范围。
目前为止,还没有公开的文献表明落塔实验系统用于航天器编队飞行动力学实验。
(2)失重飞机实验错误!未找到引用源。
根据动力学原理,在地球引力范围内的物体通过加速或减速使得受到的惯性力与重力相抵消时即可实现失重状态,失重飞机就是借助这一原理通过抛物线飞行实现失重环境的模拟。
图1为失重飞机抛物线飞行示意图,这种实验方法主要用于训练航天员在空间微重力环境下的适应能力,由于其实验精度较低故没有得以大量使用。
图1 失重飞机抛物飞行轨迹图目前只有美国、俄罗斯、日本以及欧洲等国家开展过失重飞机飞行实验,值得一提的是电磁航天器RINGS曾经在失重飞机上进行二维漂浮实验错误!未找到引用源。
(3)气浮平台实验气浮平台利用喷射压缩气体产生的反重力抵消卫星模拟器重力,从而实现微重力环境的建立错误!未找到引用源。
气浮平台作为航天器控制仿真手段几乎与航天器研制同时起步,美国早期的TIROS电视转播卫星利用气浮台进行了章动阻尼实验;我国东方红一号卫星也利用三轴气浮台进行了天线伸展等实验错误!未找到引用源。
目前气浮平台已经从单一的姿态模拟发展为姿轨联合模拟,从简单的模拟实验发展为半物理仿真并逐渐向全物理仿真方向发展。
气浮平台用于航天器相对运动的模拟始于上世纪六十年代,NASA为阿波罗载人登月计划在轨交会对接任务研制了地面对接实验系统,该系统轴向运动距离0.6m,横向运动距离±0.15m主要用于验证对接过程的动力学特性。
上世纪八九十年代,航天器编队飞行研究的持续升温促使欧洲和日本先后建立了9自由度的半物理仿真实验系统。
其中德国宇航中心研制的欧洲近距离操作仿真器EPOS可以用于模拟12米之内航天器的相对运动错误!未找到引用源。
,日本NASDA 于1994年建立9自由度的半物理仿真实验系统并开展交会对接任务研究与地面实验错误!未找到引用源。
利用气浮平台进行航天器编队飞行任务的全物理仿真实验系统出现于上世纪九十年代,美国MIT空间实验室开展的SPHERES (Synchronized Position Hold Engage Reorient Experimental Satellites)计划将多个排球大小的卫星送入太空,同时保持相互之间精确的位置从而可以组成一个庞大的太空望远镜,用来寻找其它恒星附近的行星。
为了在地面环境模拟这些微小卫星之间的编队飞行及测试控制算法,MIT在2000年至2007年间开发了数套三自由度气浮台,这些气浮台通过高压CO2产生气垫浮起在工作台面上,能实现二维的平动及绕垂直轴的转动错误!未找到引用源。
-错误!未找到引用源。
NASA喷气推进实验室也建有自己的基于气浮平台的相对运动仿真系统(Formation Control Testbed, FCT),该系统由两个五自由度卫星模拟器与气浮平台基座组成,其实物图如图2所示,最新资料显示JPL实验室已经完成对五自由度卫星模拟器的改造使其升级为六自由度从而实现航天器相对运动全自由度的物理模拟错误!未找到引用源。
-错误!未找到引用源。
据公开资料显示JPL的相对运动仿真系统已经用于编队飞行、姿态协同、编队重构等问题的地面实验研究,但是具体的工程型号及相应的空间任务则未见报道。
图2 NASA五自由度气浮仿真试验系统综上所述,气浮平台具有实验时间长、实验仿真度高、实验结果精度高等特点,故其常常作为航天器近距离相对运动实验的首选实验设备。
对于电磁航天器地面实验而言利用气浮平台建立实验方案具有极高的可行性。
(4)液浮实验液浮实验是利用液体浮力平衡重力从而使得物体处于悬浮状态进而建立微重力实验环境的实验手段错误!未找到引用源。
液浮实验主要用于训练航天器空间活动能力与操作能力、验证空间结构安装错误!未找到引用源。
、大型结构的空间对接及组装试验等方面错误!未找到引用源。
早在20世纪60年代国外就开展了液浮实验的研究工作,时至今日液浮实验依旧在不断发展与完善。
美国早在20世纪六十年代就开始液浮实验的研究,并建立了众多液浮实验系统。
1973年美国成功利用地面液浮实验与空间天空实验室协同工作并一举修复太阳帆板展开问题使得针对液浮实验系统应用前景的研究大幅升温。
值得一提的是哈勃望远镜的修复也是首先在液浮平台中进行模拟试验而后由航天员在空间加以实施的。
俄罗斯也在星城建立了自己的液浮实验系统用以训练航天员,日本、德国等国家也先后建立自己的液浮实验系统。
马里兰大学在研究在轨服务技术的过程中自主开发一套液浮实验系统并取名为Ranger,图3为马里兰大学的Ranger液浮实验系统实物图。
Ranger液浮实验系统通过自主调节自身空腔体积调节浮力以实现悬浮,并利用机械臂模拟空间机器人在轨服务过程错误!未找到引用源。
图3 Ranger系统实物图我国西北工业大学袁建平、朱占霞教授团队在液浮实验系统的基础上发展并建立空间环境模拟混合悬浮实验系统(PESS)错误!未找到引用源。
-错误!未找到引用源。
,该系统利用液浮实验系统与电磁支撑系统相结合建立地面实验进而实现空间运动的地面模拟,目前该项目还在持续建设中。
液浮实验具有实验时间不受限、实验自由度高等特点,但是由于流体计算及阻力补偿精度问题限制了其在航天器编队飞行实验中的应用错误!未找到引用源。
德克萨斯大学曾使用液浮法建立电磁自助对接分离项目的地面验证性实验错误!未找到引用源。
,并取得了较好的实验结果。
相信随着流体计算及阻力补偿精度的提高,液浮平台在航天器编队飞行地面实验方面具有广阔的应用前景。
综上所述,目前航天器地面实验作为验证空间关键技术的重要手段已经成为航天器设计研究中的重点。
未来航天器中几乎所有的关键技术都需要先在地面环境下进行实验验证,从而确保在轨验证的顺利开展。
结合电磁航天器编队飞行实验持续时间长、控制力小以及控制力连续等特点,电磁航天器编队飞行地面实验最适于使用气浮平台开展,下面将对目前已经开展的电磁航天器地面实验进行介绍。
3.2 电磁航天器地面实验电磁航天器地面实验是验证电磁航天器可靠性的主要技术手段。
由于其对于电磁航天器的研究具有重要意义,几乎所有电磁航天器研究单位均会配备相应的电磁航天器地面实验系统用以辅助电磁航天器的开发及关键技术研究。
在电磁航天器的地面实验中最具代表性的为麻省理工学院空间系统实验室所主持的电磁编队飞行项目。
该项目配备有EMFF以及μEMFF两套地面实验设备,用以分别进行十米量级以及米量级条件下电磁航天器的编队飞行技术。
EMFF由气浮平台作为基础实验设备,添加超导电磁线圈用以完成电磁航天器编队飞行的地面实验模拟。
由于气浮平台限制数值方向的自由度,EMFF中的卫星模拟器仅安装两组相互垂直的超导线圈。
在地面实验过程中一个卫星模拟器固定,另一个在其磁场内利用电磁相互作用完成编队飞行的任务模拟。