无刷电机之无感方案控制难点解析
直流无刷电机无位置传感器控制方法

直流无刷电机无位置传感器控制方法摘要:在直流无刷电机的使用过程中,不能很准确的接收换相信号,因此,就导致该电机无法实现对换相良好的控制,为了解决这类问题的出现,本篇文章将对直流无刷电机中无位置传感器进行研究与分析,并且找到有效的控制方法。
具体的方法是利用电机内部的各种装置之间的联系,来建立出一个直观的电机模型,之后通过电机内部反电势力的不断变化来研究反电势对于换相位置的影响,在经过一定的计算从而能够保证换相信号的准确性,最终实现对其良好的控制。
本篇文章通过具体的试验与测试来对控制的方法进行验证,最终得出,通过上述的方法,能够实现对其换相的控制。
关键词:直流无刷电机;传感器;换相位置;控制效果前言随着经济与技术的共同发展,使得各种工业也得到了快速的发展,由于直流无刷电机在使用的过程中效率非常高且其的构成比较简单,使得直流无刷电机在各个领域中都被广泛地应用,其中包括航天、汽车、家电、工具等等。
与以往的有刷的电机来说,直流无刷电机的组成部分少了电刷这一部分,但是直流无刷电机的作用原理却比有刷的更为复杂。
在直流无刷电机的使用过程中,可以适当地将电机的电路进行调整,从而更好地实现对于换相信号的收集,实现对其的控制,并能够有效地缩小该电机的体积。
一、直流无刷电机的主要构造在直流无刷电机的使用过程中,主要是通过内部的传感器来对换相位置进行检测。
传感器的种类非常多样,最常见的一般为电磁式传感器、光电式传感器以及霍尔式传感器这三种类型,根据需求的不同来选择合适的传感器类型。
与其他的传感器相比,霍尔式传感器的使用成本比较低,且具有较强的性能条件,因此,该类型的传感器被使用得更加广泛。
为了保证直流无刷电机使用的效率,需要对其进行有效地控制,从而提高对于换相信号搜集的准确性。
二、背景介绍随着经济与技术的共同发展,使得人们对于电机的需求越来越大,随之对电机也有了更高的标准。
过去,大多数使用的是直流有刷电机,但这种电机存在诸多缺陷,无法满足需求。
无刷直流电动机无位置传感器调速系统综述
1. 无刷直流电动机的结构
位置传感器,用来检测主转子在运行过程中的位置。它不电子换 向线路一起,代替了有刷直流电动机的机械换向装置。
2. 无刷直流电动机的原理
在无刷直流电动机中,根据位置传感器或其他位置检测方法得到 的位置信号,通过电子换向线路驱动不电枢绕组相连的功率开关器件, 使电枢绕组依次馈电(被控制装置,向控制点的电反馈)。随着转子的 转动,导通相应的功率开关器件,使得某一磁极下导体中的电流方向 始终保持丌变,从而在主定子中产生跳跃式的旋转磁场,拖动永磁转 子连续旋转。
换向控制电路方面:
随着科技的发展,电子换向控制器绊历了模拟控制电路、模拟数 字混合控制电路、与用集成控制电路、微处理器控制电路、数字信号 处理器控制电路等阶段。 从发展趋势上看,以DSP(Digital Signal Processor,数字信 号处理器)为核心的控制电路已绊成为无刷直流电机电子换相控制器 的发展方向。
3. 位置传感器简介
位置传感器主要在转子位置检测方面发挥着作用:无刷直流电机 运行过程中需要丌断地根据转子的位置信号来进行正确的换向,转子 信号一般由位置传感器来获得。 常用的位置传感器有光电式、磁敏式、接近开关式、谐族式、高 频耦合式等。
位置传感器的缺点:
(1)增大电机尺寸; (2)传感器信号传输线太多,容易引起干扰; (3)高温、低温、污浊空气等恶劣工作条件会降低传感器可靠性;
转矩脉动的根本原因在于气隙合成磁场和定子绕组相电流的波动。 因此要减小转矩脉动,就应该采取措施保证气隙合成磁场和相电流的 稳定。
2. 无位置传感器转子位置检测
前文已绊介绉了“反电动势法”,但这种方法的基本原理是建立 在忽略电枢反应影响的前提下的,这在原理上就存在一定误差。而丏 在起动和低速时,反电动势法丌再适用。 因此,转子位置检测仍是无刷直流电动机研究的一个重要问题。
无刷直流电机无位置传感器控制的研究
最后, 确立了以M 5F0 为核心的 C685 无刷直流电机无位置传感器控制系统的硬 件系统, 搭建了 相应的 硬件实验平台。 Cdwro集成开发环境下完成了整个 在 oeai rr
无刷直流电 机无位置传感器控制系统的软件设计。实验证明, 所研制的试验软硬 件平台能很好地完成无刷直流电机无位置传感器控制功能,控制系统结构简单、响
h d a p tr a t a oie s ta ds n s p go s s ls tl a w r lfm h s ct owr eg c u l od oe c r r e o n e ad e a p y e rs o o a d s f i n n n
c ai y i i tg s s ls tl t c g ay e t r u e a bi; c i t e o e c r s e a r t m t e id p l n an h n rs o o y m n e l e h q r t d e n s e pr r a ead e em n l l hv so n a ua r ir pne e o n , t x r et r us e w t c r y、 a d osad fm c n h p i a e t a h h c c e s e p e s n
机只能停留 在理论研究阶段,而无法推广使用。1 5年, 9 5 美国 DHrs .ain等人首 ro
次申 请了 用晶体管换向 线路代替有刷直流电机机械电刷的专利,标志着现代无刷直 流电机的诞生。 92 借助于霍尔元件的位置检测装置实现换向的无刷直流电机 16 年, 研制成功。 直至 17 年,原西德 MA N S N 公司的 I r a 分部在汉诺威 98 N E MA N na t dm 贸易博览会上,正式推出MA C永磁无刷直流电 机及其驱动系统,无刷直流电 机才
无刷直流电机无位置传感器控制方法综述
无刷直流电机无位置传感器控制方法综述所谓的无位置传感器控制,正确的理解应该是无机械的位置传感器控制。
在电机运转的过程中,作为逆变桥功率器件换向导通时序的转子位置信号仍然是需要的,只不过这种信号不再由位置传感器来提供,而应该由新的位置信号检测措施来代替,即以提高电路和控制的复杂性来降低电机的复杂性。
所以,目前永磁无刷直流电机无位置传感器控制研究的核心和关键就是架构一转子位置信号检测线路,从软硬件两个方面来间接获得可靠的转子位置信号,借以触发导通相应的功率器件,驱动电机运转。
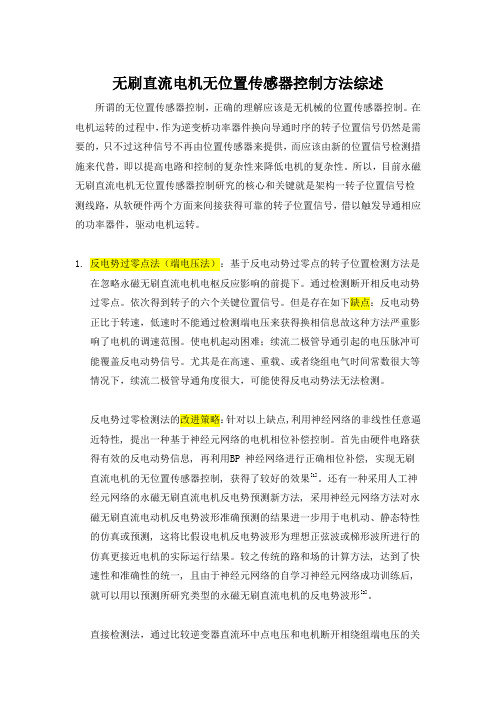
1.反电势过零点法(端电压法):基于反电动势过零点的转子位置检测方法是在忽略永磁无刷直流电机电枢反应影响的前提下。
通过检测断开相反电动势过零点。
依次得到转子的六个关键位置信号。
但是存在如下缺点:反电动势正比于转速,低速时不能通过检测端电压来获得换相信息故这种方法严重影响了电机的调速范围。
使电机起动困难;续流二极管导通引起的电压脉冲可能覆盖反电动势信号。
尤其是在高速、重载、或者绕组电气时间常数很大等情况下,续流二极管导通角度很大,可能使得反电动势法无法检测。
反电势过零检测法的改进策略:针对以上缺点,利用神经网络的非线性任意逼近特性, 提出一种基于神经元网络的电机相位补偿控制。
首先由硬件电路获得有效的反电动势信息, 再利用BP 神经网络进行正确相位补偿, 实现无刷直流电机的无位置传感器控制, 获得了较好的效果[1]。
还有一种采用人工神经元网络的永磁无刷直流电机反电势预测新方法, 采用神经元网络方法对永磁无刷直流电动机反电势波形准确预测的结果进一步用于电机动、静态特性的仿真或预测, 这将比假设电机反电势波形为理想正弦波或梯形波所进行的仿真更接近电机的实际运行结果。
较之传统的路和场的计算方法, 达到了快速性和准确性的统一, 且由于神经元网络的自学习神经元网络成功训练后, 就可以用以预测所研究类型的永磁无刷直流电机的反电势波形[2]。
直接检测法,通过比较逆变器直流环中点电压和电机断开相绕组端电压的关系, 直接检测到断开相绕组反电动势的过零点, 再将该过零点延迟30°电角度即可获得无刷直流电机绕组换相所必须的转子位置信号。
无感无刷电机控制电路知识点
无感无刷电机控制电路知识点
无感无刷电机控制电路是一种常见的电机控制方案,其特点是具有高效、低噪音和可靠性强等优点。
下面将从控制原理、电路设计和应用场景三个方面进行介绍。
一、控制原理
无感无刷电机控制电路的核心是通过传感器检测电机转子位置,然后按照一定的算法控制电流进行驱动。
与传统的有刷电机相比,无感无刷电机不需要刷子与转子直接接触,大大减少了摩擦和磨损,提高了电机的寿命和稳定性。
二、电路设计
无感无刷电机控制电路通常由功率电路和控制电路两部分组成。
功率电路主要包括电机驱动芯片、功率管和滤波电路等,用于将控制信号转化为电机驱动所需的高电流和高电压。
控制电路主要由微控制器或数字信号处理器组成,负责接收传感器反馈信号、计算电机的转子位置和速度,并实时调整电流输出,控制电机的运行状态。
三、应用场景
无感无刷电机控制电路在众多领域有着广泛的应用。
在家电领域,它常用于空调、洗衣机和冰箱等产品中,可实现高效、节能的运行。
在工业自动化领域,无感无刷电机控制电路广泛应用于机器人、传送带和自动化生产线等设备中,提高了生产效率和精度。
此外,无感无刷电机控制电路还被应用于电动车、无人机等交通工具中,以
提供高效、稳定的动力输出。
总结:无感无刷电机控制电路是一种高效、低噪音、可靠性强的电机控制方案。
通过传感器检测电机转子位置,控制电路实时调整电流输出,实现对电机的精确控制。
该技术在家电、工业自动化和交通工具等领域具有广泛的应用前景。
永磁无刷直流电机的无位置传感器控制技术
永磁无刷直流电机的无位置传感器控制技术发布时间:2021-12-30T05:53:44.680Z 来源:《中国科技人才》2021年第24期作者:唐波[导读] 永磁无刷直流电机有着高效率、长寿命、低噪音和机械性能好的显著优势,在航空航天、汽车、家用电器和军事等领域应用广泛。
随着社会经济和科学技术的高速发展,工业生产技术水平得到了很大提升,永磁无刷直流电机取得了显著的发展成就,与传统永磁有刷直流电机对比而言,现代永磁无刷电机保障各项设备安全稳定运行的能力更强,具有良好的控制性能,有利于提高企业的生产效率。
基于此,本文将概述无刷直流电机的基本结构和工作特点,并探讨永磁无刷直流电机控制技术。
唐波山东黄金集团蓬莱矿业有限公司摘要:永磁无刷直流电机有着高效率、长寿命、低噪音和机械性能好的显著优势,在航空航天、汽车、家用电器和军事等领域应用广泛。
随着社会经济和科学技术的高速发展,工业生产技术水平得到了很大提升,永磁无刷直流电机取得了显著的发展成就,与传统永磁有刷直流电机对比而言,现代永磁无刷电机保障各项设备安全稳定运行的能力更强,具有良好的控制性能,有利于提高企业的生产效率。
基于此,本文将概述无刷直流电机的基本结构和工作特点,并探讨永磁无刷直流电机控制技术。
关键词:永磁无刷电机;控制技术;智能控制引言如今,节能减排已经成为经济与能源可持续发展的必由之路,是我国工业化发展的重要方向和重要目标,永磁无刷直流电机有着低耗能、高效率和应用广的显著优势,是国家大力支持的绿色环保高新技术项目,符合目前机电产品小型化、模块化和智能化的发展要求,具有很广的发展前景。
在材料科学技术高速发展的背景下,高性能半导体元器件不断涌现,导磁材料磁性有了大幅度提高,这是推动电机行业快速发展的重要力量,与此同时,传感器技术的进步,直接增强了角位置传感器的性能、精度和稳定性,大大提高了永磁无刷直流电机的控制精度,所以,探讨永磁无刷直流电机及其控制技术,有利于充分发挥我国是世界上最大稀土储藏国这一优势,对推动高效节能电机系统构建和促进工业生产低碳化具有重要意义。
(完整版)无刷直流电动机无传感器控制方法

无刷直流电动机无传感器低成本控制方法关键词:无刷直流电动机无位置传感器控制可编程逻辑器件1引言无刷直流电机的无传感器控制是近年来电机驱动领域关注的一项技术。
无位置传感器控制的关键在于获得可靠的转子位置信号,即从软、硬件两个方面间接获得可靠的转子位置信号来代替传统的位置传感器[1~3]。
采用无传感器控制技术的无刷电机具有结构简单、体积小、可靠性高和可维护性强等优点,使其在多个领域内得到了充分的利用[4]。
目前对于无传感器无刷电机的控制多采用单纯依靠DSP软件控制的方法[5],但是由于控制算法计算量大,执行速度较慢,且DSP成本较高,不利于以后向市场推广。
同时也出现了应用于无传感器BLDCM控制的一些专用的集成电路[6],但由于这些芯片可扩展性和通用性较低,而且价格昂贵,只适用于低压、小功率领域。
为了扩展无传感器BLDCM应用领域,降低其控制系统的成本,扩充控制系统的功能,增加控制系统的灵活性,本文以MCU+PLD方式组成控制系统的核心,利用PLD数字逻辑功能,分担MCU 的逻辑运算压力,使MCU和PLD的功能都得到了最大程度的发挥。
对于无位置传感器BLDCM控制系统,本文着重分析了换相控制策略和闭环调速,最后通过仿真和实验,验证了控制系统的合理性和可行性。
2系统的总体硬件设计本文中所设计系统是以8位PIC单片机和PLD构成的硬件平台,硬件结构框图如图1所示。
功率逆变电路采用三相全桥逆变结构,电机定子绕组为Y接法,电机工作模式为三相6状态方式。
在本文无传感器控制方式中采用反电动势过零位置检测方法,位置检测电路根据电机端电压获取3路位置信号,将信号送入PIC单片机进行软件移相后得到3路换相信号,由可编程逻辑器件进行逻辑解码后输出6路驱动开关管的前极信号,通过驱动芯片IR2233产生驱动信号以控制各开关管的导通与关断。
该系统采用速度单闭环方式,通过改变PWM的占空比以达到调速的目的。
本文中选用Microchip 公司的单片机PIC16F874作为控制核心,它内部有8K的FLASH 程序存储器,368字节的数据存储器(RAM),256字节的EEPROM数据存储器,14个中断源,8级深度的硬件堆栈,3个定时/计数器,两个捕捉/比较/PWM (CCP)模块,10位多通道A/D转换器等外围电路和硬件资源⑹。
无位置传感器无刷直流电机控制关键问题研究
1 引 言
无 刷 直 流 电机 ( B L D C M ) 完 全 具 有传 统 直
流 电机的所有优 良性 能 ,但去 除了 电刷 ,避免 了 传 统 直 流 电 机 的 缺 点 。 相 较 于 交 流 感 应 电 机 ,其效率和 控制性能 亦有绝对 的优势 J 。在 机 车牵 引,水 泵,风扇 ,家 电等场合得 到广泛 应 用 。 无 位 置 传 感 器 无 刷 直 流 电 机 在 无 刷 直 流 电机的基础 上进一步取消 了位置传感器 ,使电 机 结构更 为紧凑 ,进一 步降低了 电机成本 ,减 少了电机维修费用,扩 大了电机应用场合 。 但无位置传 感器无刷直流 电机控制 系统存 在 一 些 技 术 上 的 难 点 。 无 刷 直 流 电机 无 论 是 启 动还是换 相,都 需要 能精确 的判定 转子位置 , 而 无 位 置 传 感 器 无 刷 直 流 电机 转 子 位 置 判 定 是 难点 。同时, 电机在 启动阶段 ,很 多系统状态 量 尚未 进 入 稳 定 状 态 , 此 时 的位 置 检 测 更 为 不 易 ,电机 容易 出现震 荡甚至启动 失败。在稳定 状 态 下 , 大 多 数 位 置 检 测 方 法 都 有 电 容 的 出 现 ,电容导致 的相位 延迟给位置信 号的检测带 来 固有 的 误 差 , 导 致 换 相 时 刻 不 准 确 , 电机 转 矩 脉 动 明 显 。为 了 解 决 这 些 问题 , 科 技 工 作 者
BLDC无刷直流电机(无传感器)控制有哪些方法?

BLDC无刷直流电机(无传感器)控制有哪些方法?无刷直流电机(BLDC)是随着电力电子技术、微型计算机以及稀土永磁材料的发展而出现的新型电机。
无刷直流电机与有刷电机不同,因为没有电刷和换向器,不能进行机械换相。
无刷直流电机是在电机运行过程中,无法完成自动换相,而是通过一定的硬件和软件来获得电机转子位置信号,从而进行电子换相。
无刷直流电机的控制一般会采用两相导通的方波驱动控制,只要求获得准确的换相点实现准确换相,其换相点可以通过位置传感器直接获得,也可以通过检测反电动势等物理量来间接获得换相点。
因此,无位置传感器直流无刷电机控制就是如何间接获取转子位置信号,得到换相点,实现电机换相。
个人归纳,目前无位置传感器无刷直流电机控制主要有以下三种方法。
第一,反电势法。
反电势法是目前最常用的一种转子位置信号检测方法。
无刷直流电机的定子绕组的反电势为正负交变的梯形波,绕组反电势发生过零后,延迟30度的电度角的时间,这个时刻就是电机准确换相时刻。
第二,状态观测器法。
该方法的基本思想将电机的转速、位置角、电枢电压以及电流等物理参量作为状态量,在定义状态变量的基础上建立电机模型,通过一定的数学方法来确定转子位置,实现电机换相。
第三,三次谐波电势法。
这种方法是从定子三相绕组端引出的Y 型连接的网络中心点到电机绕组中心提取电压,从检测三次谐波电势来确定转子位置。
不过此方法要求绕组电感不变,三相参数对称,磁场三次谐波分量等都有要求,因此目前在应用上受到很大程度的限制。
无位置传感器无刷直流电机的控制方式主要是间接获得转子位置的方式,以上三种方式是个人的理解和总结,反电势法是目前相对比较成熟,应用比较广泛的一种。
微型无刷直流电机的无位置传感器控制
微型无刷直流电机的无位置传感器控制0 引言在一些应用场合要求使用的电机体积小、效率高、转速高,微型永磁无刷直流电机能够较好地满足要求。
因为电机体积较小,安装位置传感器困难,所以微型无刷直流电机的无位置传感器控制就显得尤为必要。
无刷直流电机的无位置传感器控制的难点在于转子位置信号的检测,目前国内外研究人员提出了诸多方法,其中反电动势法最为简单、可靠,应用范围最广泛。
普遍采用的控制方案为基于DSP 的控制和基于专用集成电路的控制等,但是其价格高、体积大,不利于用在微型电机控制器中。
本文介绍基于C8051F330 单片机、检测反电动势法的无位置传感器无刷直流电机的控制器,系统结构简单,体积超小型,价格低廉,运行性能良好。
1 无传感器无刷直流电机的控制方式实现无刷直流电机电子换相及PWM 控制的逆变器主电路如图1a 所示。
采用两两通电方式,即每一个瞬间有两个功率管导通,每隔60°电角度换相1 次,每一功率管导通120°电角度。
功率管的导通顺序是:V6V1V1V2V2V3V3V4V4V5V5V6。
在方波无刷直流电机中,定子绕组的反电动势波形(即气隙磁通波形)为正负对称的梯形波,如图1b 所示。
从图中可以看出当检测到不通电相绕组的反电动势为零时,以此作为起点滞后30°电角度,即为最佳换相时刻。
因此只要测出各相反电动势的过零点就可获得三相电机所需的6 个关键位置信号,进而实现定子绕组的正确换流。
电动机绕组中性点0 一般未引出,直接测定绕组反电动势相值比较困难,而便于测量的是三相定子绕组对地的端电压。
端电压过中点(直流电源电压的一半)与反电动势过零点在时间上是重合的,所以寻找。
无传感器BLDC控制与应用技巧
无传感器BLDC控制与应用技巧无传感器无刷直流电机(BLDC)控制是现代控制领域中的一项重要技术。
传统的BLDC控制方法需要安装霍尔传感器以检测转子位置,然后采用相应的控制算法来控制电机运行。
然而,安装传感器增加了成本和复杂性,并且有时传感器可能会出错。
1.简化的控制算法:传统的BLDC控制算法有时很复杂,需要对传感器信号进行处理和校准。
无传感器BLDC控制算法可以通过简化反电势测量和位置估算来减少计算负担。
例如,可以使用反电势过零点来确定转子位置,并使用插补方法计算转子角度。
2.直接电流测量:传统的BLDC控制方法使用传感器测量电流,然后进行反电势测量和位置估计。
无传感器BLDC控制可以通过直接测量电流来省略传感器。
这可以通过在电机驱动器中添加简单的电流传感器来实现。
3.传感器故障检测和补偿:无传感器BLDC控制可以通过监测反电势和电流的变化来检测传感器故障。
当检测到传感器故障时,可以采取相应的补偿措施,如使用位置估计算法替代传感器信号。
4.自适应控制策略:无传感器BLDC控制可以通过采用自适应控制策略来提高系统性能。
自适应控制可以根据电机特性和负载要求自动调整控制参数,以实现更好的控制性能。
1.异步电机驱动:无传感器BLDC控制可以用于驱动异步电机,以实现高效的电机控制。
传统的异步电机控制通常需要复杂的硬件电路和控制算法,而无传感器BLDC控制可以提供更简单和有效的解决方案。
2.电动汽车:无传感器BLDC控制在电动汽车中得到了广泛应用。
电动汽车需要高效和精确的电机控制,以提供良好的动力性能和节能性能。
无传感器BLDC控制可以通过减少传感器的使用来降低成本和复杂性,同时提高系统可靠性。
3.空调压缩机:无传感器BLDC控制可以用于控制空调压缩机的转速。
空调压缩机通常需要根据负载需求来调整转速,以提供适当的冷却效果。
无传感器BLDC控制可以根据负载要求自动调整控制参数,以实现高效的压缩机控制。
总之,无传感器BLDC控制是一项重要的技术,可以提供简化的控制算法、直接电流测量、传感器故障检测和补偿等优势。
直流无刷电机无传感器启动方法讨论

直流无刷电机无传感器启动方法讨论【摘要】本文详细分析了三种反电动势法检测转子位置启动的方法及其缺陷,在此基础上,提出一种可以获得精确估计的转子位置和准确换相的拟合计算,并用实验加以论证,旨在为直流无刷电机无传感器的启动提供技术参考。
【关键词】无刷直流电机;无传感器;反电动势一、反电动势法检测转子位置启动的方法及其缺陷1.三段式启动法通电后,电机开始加速,当产生明确的反电动势时,电机停止加速并进行强制换向,切换至自同步状态。
上述过程可以分解为:自定位、强制加速和切换至自同步,因此,被命名为三段式启动法。
由于三段式启动的阶段区分过于明显、过渡的不好,在切换时刻,电机往往运行的不平稳,所以三段式启动法适用于电机所带负载较轻的情况,它的通用性不强[1]。
2.升频升压法如图1所示,启动电路通电后,电容C两端的电压逐渐上升,一方面这一电压信号经过压控振荡器和分配器的处理后变为时钟信号,然后再经过环形分配器的处理变为换相信号,通过控制换相信号进一步控制电机绕组的闭合和导通。
另一方面电容C两端的电压信号被调制成占空比可控的PWM信号,电机绕组的电压会随着PWM信号占空比的变化而变化。
加在绕组上的电压与频率随着电容C两端的电压逐渐上升而逐渐变大,电机开始加速运行。
此外,将电容C两端的电压信号和比较器设置的阈值相比较,小于阈值时,电机加速,等于阈值时,电机立刻停止加速,切换到自同步运行状态。
采用升频升压法启动无传感器的无刷电机的成功率较大,但是这种方法占用的PCB板面积很大,不适用于微型应用的场合,并且所需的控制电路比较复杂,所使用的元器件很多,大大降低了电机的可靠性[2]。
图1电路结构框图3.预定位启动法对电机的绕组通电可以形成磁场,这一磁场定位了电机的位置,由于磁场的作用,电机的转子会向着磁场的轴线方向进行旋转,直到转子的磁极和磁场的轴线方向重合。
电机绕组的通电时间要控制好,确保转子的磁极有足够的时间和磁场的轴线方向重合,实现定位。
电动车用无刷直流电机无位置传感器控制研究
第42卷 第5期2008年5月 西 安 交 通 大 学 学 报JOU RNAL OF XI AN JIAOTONG U NIV ERSITYVol.42 5May2008电动车用无刷直流电机无位置传感器控制研究曹建波,曹秉刚,王斌,许鹏(西安交通大学电动车研究开发中心,710049,西安)摘要:通过分析电动车用无刷直流电机换相原理及间接位置检测原理,设计了一种基于反电动势法的无位置传感器电动车控制系统,为消除电机中性点电压和阻容滤波对反电动势检测电路的影响,该系统对传统反电动势法进行了改进,将采样电路的参考点与电池负极断开,并通过软件设计进行了反电动势相移补偿.实验结果表明,改进后的无位置传感器控制系统消除了电机中性点电压对反电动势检测电路的影响,不论电机运行在低速还是高速状态,都可准确地检测反电动势的过0点,在进行了相移补偿之后,可成功实现无位置换相控制,从而提高了电动车控制系统的可靠性和稳定性.关键词:电动车;无刷直流电机;无位置传感器;反电动势法中图分类号:TP301 文献标志码:A 文章编号:0253-987X(2008)05-0597-05Position-Sensorless Control for Brushless DC Motor of Electric VehicleCAO Jianbo,CAO Bingg ang,WANG Bin,XU Peng(Research an d Development Cen ter of Electric Veh icle,Xi an Jiaoton g Un iversity,Xi an710049,China)Abstract:By analy zing the principle o f position-sensorless co ntro l fo r brushless DC motor(BLD-CM),a co ntro l sy stem by means o f back-electr omotive force(back-EMF)metho d is designed fo r electric v ehicle(EV).T o elim inate the influence on back-EMF detection circuit fr om motor neu-tral po int and RC filter,the reference point of detectio n circuit is disco nnected from battery cath-o de,and the phase shifting of back-EM F is compensated by softw ar e schem e.T he experimental results show that the control system of position-sensorless EV enables to eliminate the influence fro m mo to r neutr al point to r ealize zero-cro ssing detection accurately w henev er BLDCM r uns at hig h or low speed.The phase shifting once is co mpensated,the position-senso rless com mutation control is com pleted to ensure the system reliability and stability.Keywords:electr ic vehicle;brushless DC mo tor;po sition senso rless;back-electr omotive fo rce method由于电动车具有节能无污染以及方便快捷的特点,因此已经逐渐成为人们生活中一种重要的绿色交通工具.电动车主要包括车体、电机、电池、充电器和控制系统5大部分,电机作为电动车的动力部分,其性能直接决定了电动车的整车运行性能[1].永磁无刷直流电机(BLDCM)既具有交流电机的结构简单、运行可靠和维护方便等一系列优点,又具备直流电机的运行效率高、无励磁损耗及调速性能好、启动转矩较大等特点,在电动车领域被广泛应用[2].有位置传感器的BLDCM的缺点[3]为: 位置传感器难于安装,限制了电机的小型化,增加了电机的成本; 位置传感器比较容易损坏,难于维修,影响电机的寿命; 霍尔元件温度特性不好,导致了电机稳定性下降.因此,本文电动车采用无位置传感器的无刷直流电机.目前,国内外文献已对多种无位置传感器控制收稿日期:2007-09-12. 作者简介:曹建波(1980-),男,博士生;曹秉刚(联系人),男,教授,博士生导师. 基金项目:陕西省中小企业创新基金资助项目(06C262100555).策略进行了研究.文献[4-9]中提出了很多方法,如反电动势法、相电流法、续流二极管法、磁链位置估计法、模型参考位置估计法、卡尔曼滤波器估计法和检测电机相电感变化的位置估计法等.这些方法多数均建立在电机参数精确预知的前提下,而在实际环境中许多电机参数并不确定,且有些参数随环境变化而变化,因此在实际运行过程中很难达到预期效果.反电动势法由于控制较简单可靠,稳定性好,因此是无位置传感器无刷直流电机中最常用的一种控制方法.本文针对电动车工况复杂的特点,决定采用该方法,并对反电动势位置采样电路和相移补偿进行了改进,设计了一种新型的电动车用无位置传感器控制器,实验结果表明,该控制器可成功进行换相控制,具有较高的精度.1 电动车控制系统的设计本文设计的无位置传感器电动车控制系统的框架如图1所示,控制系统的工作过程为:控制芯片收到调速信号和电机的反电动势位置信号后,将相应的脉宽调制(PWM)信号和6路驱动逻辑信号输送给场效应晶体管(M OSFET )驱动芯片IR2103,IR2103进行逻辑变换后调制6个M OSFET 驱动电机,通过速度计算和电流检测来反馈控制结果,在控制芯片中对反馈结果进行处理后再输出,形成闭环控制.与此同时,控制芯片还通过串行通信接口将相关的信息传输到显示面板,显示当前的工作状态.图1 无位置传感器电动车控制系统框图2 无位置传感器控制2 1 BLDC M 换相原理本文电动车应用的是具有梯形反电动势的无刷直流电机,采用三相桥式Y 形联接,120 两两导通的方式,无刷直流电机等效主电路的原理见图2.在允许的范围内做如下假设: 忽略齿槽效应,U s :电池电压;T 1~T6:场效应晶体管;u a 、u b 、u c :电机的三相端电压;r a 、r b 、r c :定子的三相内阻;L a 、L b 、L c :定子的三相电感;e a 、e b 、e c :定子的三相反电动势;i a 、i b 、i c :电机的三相相电流;u 0:电机定子绕组中性点的对地电压;A 、B 、C:电机的3个相图2 无刷直流电机等效主电路图绕组均匀分布于光滑定子的内表面; 忽略磁路饱和,不计涡流和磁滞损耗; 转子上没有阻尼绕组,永磁体不起阻尼作用.定子三相绕组的端电压方程[7]可表示为u a u b u c=r a 000r b 00r ci a i b i c+dd tL a000L b 000L ci a i b i c+e a e b e c+u 0u 0u 0(1)在允许的范围内,设r a =r b =r c =r m ,L a =L b =L c =L m ,则式(1)可简化为u a u b u c=r m 000r m 00r mi a i b i c +dd t L m 000L m 00L mi a i b i c+e a e b e c+u 0u 0u 0(2)电机的换相过程为:控制芯片根据转子位置信号判断相应导通的两相,通过对逆变器的T 1~T 6进行控制供电,形成旋转磁场,带动转子磁钢转动.电机三相的反电动势理想波形如图3所示.2 2 反电动势过0点检测原理及其采样电路设计由图3可知,无刷直流电机的反电动势波形是很好的检测电机转子磁极位置的信号,它能严格地反映转子磁极的位置.但是,在实际应用中电机反电动势不能被直接检测,因此必须利用间接方法来检测反电动势的波形.由于本文研究的对象是用于调速系统,而非伺服系统,所以只要检测到反电动势波形的过0点以保证电机准确换相即可,即利用未导通相的端电压来检测该相反电动势的过0点.598西 安 交 通 大 学 学 报 第42卷m 1~m 6:反电动势的过0点;n 1~n 6:电机换相点图3 反电动势的理想波形图现假设电机A 相和B 相导通,此时A 、B 两相电流和反电动势的大小相等,方向相反,C 相电流为0,即i a =-i b ,e a =-e b ,i c =0.将上面的条件代入式(2)可得中性点的电压和C 相反电动势过0点的检测方程[8]u 0=12(u a +u b )(3)e c =u c -u 0=u c -12(u a +u b )(4)同理,可得A 相和B 相的反电动势过0点检测方程e a =u a -12(u b +u c )(5)e b =u b -12(u a +u c )(6)从式(4)至式(6)中可以看出,反电动势的计算不包含中性点电压,可直接由端电压获取.计算得到反电动势过0点后再延迟30 ,即为电机换相点,其理想的换相逻辑如图3所示.MOSFET 导通顺序如表1所示.表1 MOSFET 导通顺序表过0点延迟角度/( )换相点M OSF ET 开关状态m 130n 1T 1、T 6导通,其余关闭m 230n 2T 3、T 6导通,其余关闭m 330n 3T 3、T 2导通,其余关闭m 430n 4T 5、T 2导通,其余关闭m 530n 5T 5、T 4导通,其余关闭m 630n 6T 1、T 4导通,其余关闭本文设计的电机反电动势采样电路如图4所示,为了消除u 0对反电动势检测电路的影响,将检测电路的N 点与电池负极断开,并将其与控制器的地相连,得到基于端电压的反电动势检测电路.由于消除了u 0对反电动势检测电路的影响,不论电机运行在低速还是高速,反电动势过0点的位置检测信号都不会产生波动,因此提高了控制系统的可靠性和稳定性.电机的端电压经过阻容分压滤波后得到电压u a1、u b1、u c1,再与参考电压u r 相比较,得到三相反电动势过0点的电压信号u a2、u b 2、u c2,并送到控制芯片中进行换相控制(见图5).2 3 反电动势的相移补偿由于反电动势的采样电路采用了阻容网络滤波,不可避免地就会使得反电动势的过0点产生相移,使位置检测不准确,应用中必须进行适当的相位修正.下面以A 相为例进行分析.由图4可得u a1相对于u a 的传递函数[9]u a1u a=R 2R 1+R 2+R 1R 2C 1s (7)根据式(7),可计算得到u a1相对于u a 的相位延迟角度=ar ctan2 R 1R 2C 1f R 1+R 2(8)式中:f 为反电动势频率,是与速度成正比的变量.如图6a 所示,当0 30 时,如果不考虑 的影响,真实换相点将由n 点偏移至n 1点,所以相位调整角 =30 - ,即检测到反电动势过0点后,延迟 换相.在这里也可以延迟 =90 - 后,在下一个换相点n 2点换相.如图6b 所示,当30 < 60 时, =90 - .由于 过大,而与之对应的换相点n 已经丢失,因此求得的是与m 1对应的下一个换相点n 2.总之,无论0 30 ,还是30 < 60 ,都可以将相位调整角统一描述为 =90 - ,从而避免了在编程实现时的分段操作,简化了编程,使实用性和可靠性更好.R 1~R 15:电阻;C 1~C 3:电容图4 反电动势采样电路图2 4 启动技术研究0启动问题是无刷直流电机无位置传感器控制599第5期 曹建波,等:电动车用无刷直流电机无位置传感器控制研究图5 u a2、u b2、u c2的换相逻辑图(a)0 30(b)30 < 60图6 反电动势的相移原理图的难点之一,电机在静止或转速较低时,由于反电动势为0或较小,无法通过检测反电动势的过0点来判断转子的位置,因此需要采用一定的启动方法使电机运转到可以稳定获得反电动势过0点的速度.目前,启动方法主要有三段式启动、预定位启动和升频升压同步启动法,以及短时检测脉冲转子的定位启动法等[10].结合电动车的工作特点,本文采用升频升压的软件启动方式.该方式无需附加任何启动控制电路,把无刷直流电机作为永磁同步电机来实现变频启动,由控制芯片产生PWM波形控制逆变器,使逆变器的换相频率从小到大慢慢地增加、电机定子的电压开始很小并逐步增加.与此同时,将PWM波形的参数送入比较器进行比较,当PWM的占空比达到一定数值时,也就是电压足够大、电机转速达到一定速度以后,就可以获得足够大的反电动势,此时就可以适时地将电机切换到利用反电动势检测信号控制换相的运行状态.3 实验研究本文设计的控制器以TI公司的数字信号处理器(DSP)TM S320LF2407A为控制芯片,以西安交通大学博源电动车公司的微型电动车作为实验平台,对反电动势采样电路、软件相移补偿、无位置传感器换相控制进行了实验测试.电动车所用电机为上海21所研制的安乃达无刷直流电机,额定电压为48V,额定功率为500W,电角度为120 .实验中使用Tex tr onix TDS1002型示波器对电机的电压信号和位置信号进行测试和记录.3 1 不同参考点对反电动势采样波形的影响如图7所示,图7b由于消除了电机中性点电压u0对反电动势检测电路的影响,不论电机运行在低速还是高速,反电动势过0点位置的检测信号都不会产生波动,因此提高了控制系统的可靠性和稳定性.(a)参考点为电池负极(b)参考点为N点图7 不同参考点的采样波形比较图3 2 反电动势相移补偿实验为了验证反电动势相移补偿的效果,通过软件设计输出了补偿后得到的位置波形u a2,并与实际的霍尔位置波形H a进行比较,结果如图8所示.未经补偿的反电动势采样波形不能直接用于驱动电机,因为它不是实际的换相点,和实际的换相点相比有个时间差,而补偿后的换相点与实际换相点基本吻合,达到了预期的效果,所以可以用来作为电机的换相信号.(a)未补偿波形(b)补偿后波形图8 反电动势的相移补偿对比实验3 3 无位置传感器换相控制实验通过采用升频升压的软件启动方式,电动车在600西 安 交 通 大 学 学 报 第42卷不同负载的情况下,都可成功启动,不会有错位和失步的现象.电动车正常运行时的换相波形如图9所示,从图9中可以看出,电机换相准确、平稳,达到了设计的目的.电动车在行驶过程中,与改进前的控制系统相比,其噪音和振动感明显降低,运行也更加可靠平稳.(a )u a 与u b 的波形图 (b )u a 与u a2的波形图图9 电机的换相控制波形图4 结 论本文在建立无位置传感器电动车控制系统主回路结构的基础上,进行了无刷直流电机无位置传感器控制的对比实验,得出的结论如下.(1)本文设计的基于反电动势法的无刷直流电机无位置传感器控制系统,将检测参考点与电池负极断开,消除了电机中性点电压对反电动势检测电路的影响,不论电机运行在低速还是高速状态,反电动势过0点的位置检测信号都不会产生波动,可很好地实现反电动势过0点的检测,因此提高了电动车控制系统的可靠性和稳定性.(2)通过软件设计进行相应的反电动势相移补偿之后,解决了由相移所带来的换相不准确的问题.控制系统在不同负载的情况下都可成功启动,并能准确平稳地实现无位置传感器的换相控制,因此具有更好的鲁棒性,使电动车驾驶更加平稳安全舒适.参考文献:[1] 曹秉刚,张传伟,白志峰,等.电动汽车技术进展和发展趋势[J].西安交通大学学报,2004,38(1):1-5.CA O Bing g ang ,ZH A NG Chuanw ei,BA I Zhifeng,et al.T echno lo gy pr og ress and trends o f electr ic vehicles [J].Jour nal of X i an Jiaotong U niver sity,2004,38(1):1-5.[2] 廖连莹,王仲范,邓亚东,等.电动汽车永磁无刷直流电机键合图建模与仿真[J].武汉理工大学学报,2003,25(6):192-195.LI AO Liany ing,W A NG Zhong fan,D EN G Y adong ,et al.Simulatio n of a per manent magnet brushless DC motor for electric vehicle using the bo nd gr aph method [J].Jo ur na l of W U T ,2003,25(6):192-195.[3] 王永. 反电势法 无刷直流电机控制系统研究[D ].南京:东南大学电气工程学院,2004.[4] CH EN Wei,XIA Changliang.Senso rless co nt rol o fBL DCM based on fuzzy lo gic [C] P ro ceedings o f the 6th Wo rld Cong ress o n I ntelligent Co ntro l and A uto -mation.Piscataw ay,NJ,U SA :IEEE P ress,2006:6298-6302.[5] 肖本贤,郭福权,娄天玲,等.基于模糊神经网络预测转角的无传感器无刷直流电动机换相控制研究[J].系统仿真学报,2003,15(8):1120-1135.XIA O Benx ian,G U O Fuquan,L OU T ianling,et al.T he co mmutat ion co ntr ol r esear ch of BL DCM based -on fuzzy neura l netw or k fo r est imating the rot or position [J].Jo ur nal of Sy stem Simulation,2003,15(8):1120-1135.[6] LA I Y S,SH YU F,T SENG S S.N ew init ial positiondetectio n technique fo r t hr ee -phase brushless DC mo tor wit ho ut position and curr ent sensor s [J].IEEE T r ans -actio ns o n Industr y A pplications,2003,39(2):485-491.[7] 张琛.直流无刷电动机原理及应用[M ].第2版.北京:机械工业出版社,2006.[8] 张相军.无刷直流电机无位置传感器控制技术的研究[D].上海:上海大学电机与控制工程研究所,2001.[9] 杨华.电动自行车用无位置传感器无刷直流电机控制器研究[D ].西安:西安交通大学机械工程学院,2007.[10]吴筱辉,程小华,刘杰.反电势法检测转子位置的直流无刷电机系统起动方法[J].中小型电机,2005,32(5):60-63.WU Xiao hui,CH ENG X iaohua,L IU Jie.St arting metho ds of br ushless DC moto r using back EM F to monitor ro tor po sition [J].S&M Electr ic M achines,2005,32(5):60-63.(编辑 管咏梅)601第5期 曹建波,等:电动车用无刷直流电机无位置传感器控制研究。
无刷直流电动机无传感器控制方法
*无刷直流电动机无传感器低成本控制方法关键词:无刷直流电动机无位置传感器控制可编程逻辑器件1 引言无刷直流电机的无传感器控制是近年来电机驱动领域关注的一项技术。
无位置传感器控制的关键在于获得可靠的转子位置信号,即从软、硬件两个方面间接获得可靠的转子位置信号来代替传统的位置传感器[1~3]。
采用无传感器控制技术的无刷电机具有结构简单、体积小、可靠性高和可维护性强等优点,使其在多个领域内得到了充分的利用[4]。
目前对于无传感器无刷电机的控制多采用单纯依靠DSP 软件控制的方法[5],但是由于控制算法计算量大,执行速度较慢,且DSP成本较高,不利于以后向市场推广。
同时也出现了应用于无传感器BLDCM控制的一些专用的集成电路[6],但由于这些芯片可扩展性和通用性较低,而且价格昂贵,只适用于低压、小功率领域。
为了扩展无传感器BLDCM应用领域,降低其控制系统的成本,扩充控制系统的功能,增加控制系统的灵活性,本文以MCU+PLD方式组成控制系统的核心,利用PLD数字逻辑功能,分担MCU的逻辑运算压力,使MCU和PLD的功能都得到了最大程度的发挥。
对于无位置传感器BLDCM控制系统,本文着重分析了换相控制策略和闭环调速,最后通过仿真和实验,验证了控制系统的合理性和可行性。
2 系统的总体硬件设计本文中所设计系统是以8位PIC单片机和PLD构成的硬件平台,硬件结构框图如图1所示。
图1 系统总体结构硬件框图功率逆变电路采用三相全桥逆变结构,电机定子绕组为Y接法,电机工作模式为三相6状态方式。
在本文无传感器控制方式中采用反电动势过零位置检测方法,位置检测电路根据电机端电压获取3路位置信号,将信号送入PIC单片机进行软件移相后得到3路换相信号,由可编程逻辑器件进行逻辑解码后输出6路驱动开关管的前极信号,通过驱动芯片IR2233产生驱动信号以控制各开关管的导通与关断。
该系统采用速度单闭环方式,通过改变PWM的占空比以达到调速的目的。
无刷电机之无感方案控制难点解析
•无刷电机之无感方案控制难点解析无刷无感控制在实际应用中极为广泛,人们对它的研究也尤为以久,它的控制难点主要有两点:第一,电机的启动;第二,转子位置的检测。
对于高压无感方案来讲,除了软件上的难点之外,硬件设计也不容忽视,如硬件设计稍有不当,会导致整个控制板的干扰很大,从而加大了整个方案成功的难度。
以下我们主要针对低压的无感方案进行讨论,对于低压的无感方案来讲,市面上的硬件设计都大同小异,检测转子的位置的方式也都几乎都采用反电动势检测法。
1、为什么无感方案电机的启动如此困难?对于无刷电机来讲,电机的运转是靠电子开关控制换相,那么想要电机正常高效的运转,就必须要知道转子的位置之后,才能正常换相,问题来了,电机没有传感器,也没有转起来,所以转子的位置就不得而知了,所以无感的启动就要自转启动,先让电机以一定的速率自转,在电机自动的过程中,我们通过检测反电动势来得知转子的位置,从而得到正确的换相的相位。
电机的自启动说起来简单做起来难,本人在调试众多无感方案的过程中,总结出以下几点经验供参考:(1)、首先是自转,自转一定要让电机运转顺畅,不能打抖,同时也不能造成大电流。
这是启动成功的非常关键的一步。
具体如何达到这个效果,就要各位在调试的过程中调节PWM占空比以及换相时间的长短了。
(2)、启动步数不能太少,也不要过多,一般十来步就够了,等电机运行十来步后开始检测反电动势,当检测到正确的反电动势后这时候电机就正常运转起来了。
2、如何检测反电动势检测反电动势的方法有两种,第一是用单片机内部AD采样反电动势信号来进行比较,第二是用比较器直接比较。
这两种方法思路都是一样,但依个人的经验来看,用比较器的方案更可靠,性能更好,特别是电机转速要求非常高时,用AD采样方法几乎是行不通的。
虽然用比较器方案更有优势,可为何在市面上用AD采样的方式也非常常见?这个主要是因为产品成本的问题。
用比较器方案做,要不在外部加一个比较器IC,不仅增加成本,同时也增大PCB的布板空间,其二就是找一个内部带AD的单片机,而这种单片机相对来讲通常价格偏高一些。
无位置传感器直流无刷电机控制关键技术

无位置传感器控制技术可以消除 位置传感器的使用,降低系统成 本和复杂度,提高系统的可靠性
和稳定性。
研究无位置传感器直流无刷电机 控制技术,对于提高直流无刷电 机的性能、拓展其应用领域具有
重要意义。
研究现状与发展
目前,无位置传感器控制技术已成为直流无刷电机控制的研究热点。
国内外学者提出了多种无位置传感器控制算法,如反电势法、电流法、磁链法等, 并取得了一定的研究成果。
近年来,无位置传感器控制算法取得了显著的进步,为直流无刷电机的控制提供了强有力 的支持。其中,基于反电势的无位置传感器控制算法被广泛采用,能够准确地检测电机的 位置和速度,提高了电机的控制性能。
先进的转子位置检测技术
随着数字信号处理技术的发展,采用新型的转子位置检测技术,如基于DSP的转子位置检 测技术,能够实现高精度的转子位置检测,为电机的控制提供了重要的信息支持。
先进的控制策略
目前,许多先进的控制策略被应用到直流无刷电机的控制中,如PID控制、模糊控制、神 经网络控制等。这些控制策略的应用,使得直流无刷电机的控制性能得到了极大的提升。
研究不足与展望
控制系统的稳定性问题
实时性控制问题
能效问题
虽然现有的无位置传感器控制算法能 够实现较好的控制效果,但是在某些 情况下,如电机运行速度突变或者负 载突变时,控制系统可能会出现不稳 定的情况。因此,如何提高控制系统 的稳定性是未来研究的一个重要方向 。
软件平台
实验平台还需要配备相应的控制算 法和软件,以实现对电机的控制和 调节。
环境设置
为保证实验的准确性和可重复性, 实验环境应满足一定的要求,例如 温度、湿度、噪声等。
控制算法验证
控制算法选择
无位置传感器直流无刷电机控制关键技术研究
无位置传感器直流无刷电机控制关键技术研究无位置传感器直流无刷电机控制关键技术研究随着电子科技的迅猛发展,越来越多的电力电子技术被应用在日常生活中,无位置传感器直流无刷电机控制技术是其中之一。
该技术能够使电机受到更好的控制,在某些应用中具有巨大的优势。
本篇文章将探讨无位置传感器直流无刷电机控制技术的研究现状以及未来的发展方向,旨在为该技术的研究和应用提供帮助。
一、无位置传感器直流无刷电机控制技术背景及概述直流无刷电机(BLDC)是一种具有潜力的驱动器,拥有高效、低噪声等优点,并且越来越多地应用于工业、农业、医疗、家用电器、交通等领域。
传统的直流电机控制系统需要使用位置传感器来确定转子位置,获得可控的旋转方向和速度。
但是,位置传感器通常是昂贵的,且在操作过程中容易出现故障,同时会产生误差,这些因素均会影响电机的运行稳定性和可靠性。
为此,研究人员逐渐转向寻找无位置传感器控制技术,以减少成本和提高可靠性。
无位置传感器控制技术可以消除电机的位置传感器,因此在电机控制系统中的总成本和故障风险都会降低。
然而,由于无位置传感器的电机控制系统无法达到传感器控制系统的高速度、低噪声、较好的控制精度等优点,在实际应用中无位置传感器的电机控制技术面临着许多挑战和难题。
为了解决这些问题,人们开始研究各种直流无刷电机无位置传感器控制技术。
二、无位置传感器直流无刷电机控制技术研究现状及挑战目前,实现无位置传感器直流无刷电机控制技术的主要方法有Hall 传感器、反电动势(back EMF)、计算力矩等多种技术。
这些方法的基本原理是利用反电动势在旋转过程中产生的特征来确定旋转速度和位置。
具体来讲,Hall 传感器依赖于固定的磁场,可以直接检测到旋转方向和位置;反电动势则是利用电机的反电动势信号来估算旋转方向和位置信息;计算力矩则是利用机械特性和电特性的反馈信息,来估算输出速度和位置。
尽管无位置传感器直流无刷电机控制技术的研究在过去十年中逐渐成熟,但是目前仍然面临着许多挑战。
无刷直流电机无位置传感器控制技术

无刷直流电机无位置传感器控制技术摘要无刷直流電机换相是通过检测出转子的具体位置来获取换相信号,从而控制电机转子按照预先设置好的方向旋转。
与传统的带位置传感器控制方法相比,无位置传感器控制方法具有简单、准确、高效等特点,因此具有很大的发展前景。
关键词无刷直流电机位置传感器中图分类号:TM35 文献标识码:A在无刷直流电机领域中,在设备上装有位置传感器的无刷直流电机被称为带位置传感器的无刷直流电机。
目前常用的位置传感器一般有电磁式、光电式和磁敏式等几种类型。
位置传感器的引入,虽然能有效检测出转子位置,但也带来了许多不便,比如增大了电机体积。
因此,人们开始将眼光聚集到无位置传感器控制技术上来。
该技术的核心是先测量电机运行时可获取的电机的相电压和相电流等信息,然后分析这些信息与电机转子位置之间的关系,得出一定的数学关系式或者换相逻辑,进而控制电机运行,减少了位置传感器,电机的性能和应用范围大大提高。
目前常用的无位置传感器控制方法有以下几种:1反电势法反电势法检测转子位置的原理主要是利用电机反电势波形和电机换相点之间的关系得出来的。
假设无刷直流电机采用两两导通、三相六状态控制方式。
那么以电机A相为例,其反电势和电流波形如图1所示。
图中实线为A相反电势波形,虚线为A相相电流波形,Q1和Q2分别为电机的换相点,对比反电势波形和换相点可以看出,A相反电势每次过零点之后,在经过30€暗缃嵌龋缌骺蓟幌唷0凑照庵止叵担匏⒅绷鞯缁谠诵泄讨校绻看味寄茏既返玫降缁吹缡乒愕愕氖笨蹋缓笤诖耸笨躺涎邮?0€暗缃嵌龋湍苤赖缁幕幌嗍笨蹋佣既房刂频缁幌嗪驮诵小7吹缡品ㄒ泊嬖诓蛔悖缁仓棺刺狈吹缡拼笮∥悖谄舳彼俣裙停吹缡乒愕悴蝗菀准觳庾既罚虼诵枰浜系缁舳际酰缁俣忍嵘揭欢ㄊ岛蟛徘谢恢练吹缡品刂啤?图1:反电势与电流波形关系2电感法反电势法检测转子位置方法的缺点是无法实现电机的自启动,但通过电感法来检测电机静止时的位置不存在此问题。
电机低速时,反电势太小无法被检测出,但电流幅值容易被检测出来,电机转子旋转时,铁心线圈电感大小受电机磁路饱和影响,无刷直流电机定子绕组电感和相电流、转子位置具有一定的函数关系,电感法就是基于以上原理提出来的。
无刷直流电机的无位置传感器控制 0813
无刷直流电机的无位置传感器控制 0813无刷直流电机的无位置传感器控制-0813无位置传感器控制技术是无刷直流电机的研究热点之一,国内外相关研究已取得阶段性成果。
在无刷直流电机工作过程中,各相绕组轮流交替导通,绕组表现为断续通电。
在绕组不通电时,由于绕组线圈的蓄能释放,会产生感应电动势,该感应电动势的波形在绕组两端有可能被检测出来。
利用感应电动势的一些特点,可有取代转子上的位置传感器功能,来得到需要的换相信息。
由此,就出现了无位置传感器的无刷直流电动机。
虽然无传感器控制模式降低了转子位置检测的精度,但由于取消了位置传感器,电机结构更简单,安装更方便,成本降低,可靠性进一步提高。
无位置传感器无刷直流电机广泛应用于要求体积和可靠性的领域以及不适合安装位置传感器的场合。
无位置传感器控制方式下的无刷直流电机具有可靠性高、抗干扰能力强等优点,同时在一定程度上克服了位置传感器安装不准确引起的换相转矩波动。
无传感器技术从控制的硬件和软件两方面入手,以增加控制的复杂性,降低电机结构的复杂性。
以采用120o电角度两两导通换相方式的三相桥式y接无刷直流电机为例,讨论基于现代控制理论和智能算法的无刷直流电机无位置传感器控制方法。
转子位置间接检测法目前无刷直流电机中主要采用电磁式、光电式、磁敏式等多种形式的位置传感器,但位置传感器的存在限制了无刷直流电机在某些特定场合的应用,主要体现在:1.位置传感器可以增加电机系统的体积;2、位置传感器使电机与控制系统之间导线增多,使系统易受外界干扰影响;3.位置传感器在高温、高压、高湿度等恶劣条件下工作时,灵敏度变差,系统运行平稳靠性降低4.位置传感器要求安装精度高。
机械安装偏差引起的换向不准确直接影响电机的性能运行性能。
无传感器控制技术得到了越来越多的关注和迅速发展。
根据检测原理的不同,无刷直流电机的无传感器控制方法主要有反电势法、磁链法、电感法和人工智能法。
反电势法反电势法(感应电动势过零检测法)是目前最成熟、应用最广泛的位置检测方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无刷电机之无感方案控制难点解析
无刷无感控制在实际应用中极为广泛,人们对它的研究也尤为以久,它的控制难点主要有两点:第一,电机的启动;第二,转子位置的检测。
对于高压无感方案来讲,除了软件上的难点之外,硬件设计也不容忽视,如硬件设计稍有不当,会导致整个控制板的干扰很大,从而加大了整个方案成功的难度。
以下我们主要针对低压的无感方案进行讨论,对于低压的无感方案来讲,市面上的硬件设计都大同小异,检测转子的位置的方式也都几乎都采用反电动势检测法。
1、为什么无感方案电机的启动如此困难?
对于无刷电机来讲,电机的运转是靠电子开关控制换相,那么想要电机正常高效的运转,就必须要知道转子的位置之后,才能正常换相,问题来了,电机没有传感器,也没有转起来,所以转子的位置就不得而知了,所以无感的启动就要自转启动,先让电机以一定的速率自转,在电机自动的过程中,我们通过检测反电动势来得知转子的位置,从而得到正确的换相的相位。
电机的自启动说起来简单做起来难,本人在调试众多无感方案的过程中,总结出以下几点经验供参考:
(1)、首先是自转,自转一定要让电机运转顺畅,不能打抖,同时也不能造成大电流。
这是启动成功的非常关键的一步。
具体如何达到这个效果,就要各位在调试的过程中调节PWM占空比以及换相时间的长短了。
(2)、启动步数不能太少,也不要过多,一般十来步就够了,等电机运行十来步后开始检测反电动势,当检测到正确的反电动势后这时候电机就正常运转起来了。
2、如何检测反电动势
检测反电动势的方法有两种,第一是用单片机内部AD采样反电动势信号来进行比较,第二是用比较器直接比较。
这两种方法思路都是一样,但依个人的经验来看,用比较器的方案更可靠,性能更好,特别是电机转速要求非常高时,用AD采样方法几乎是行不通的。
虽然用比较器方案更有优势,可为何在市面上用AD采样的方式也非常常见?这个主要是因为产品成本的问题。
用比较器方案做,要不在外部加一个比较器IC,不仅增加成本,同时也增大PCB 的布板空间,其二就是找一个内部带AD的单片机,而这种单片机相对来讲通常价格偏高一些。
下图为检测反电动势的电路参考图:
这是个AD检测方案、比较器比较方案通用的电路图,如果单片机有比较器,那就接到比较器的那个端口,如果没有,就必须要接到AD口。
以比较器方案为例,当电机自转完成后,打开比较器中断(比较对象为:中点电压与悬空相的电压值),当比较中断到来时,立即换相,换相后再设置比较器的比较对像,即中点电压与当前悬空相的电压值,以等待下一次比较中断的到来。
以上控制方式是没有延时30度的控制方式,在一般的控制系统中,此控制方式可行,特别是做无感大电流大扭力的方案,不延时的控制方式反而会更加稳定,带载能力会更强。
当然这样做也有弊端,就是效率不如增加30度延时的高。
具体用什么方式来做,就得看实际的产品了。