HoneyWell_Enraf854伺服液位调试说明手册
伺服液位计调试过程

854系列伺服液位计调试过程1.1介绍这里将介绍854伺服液位计的调试过程。
其中一些主要的调试步骤,例如设定液位计参数和检查液位计性能的步骤可以在实验室中完成。
在可能的情况下尽量完成以下步骤。
在开始前必须确定,哪些必须在现场完成。
在实验室内,必须将液位计安装在支架上,支架上有可以让浮子和钢丝活动的孔。
送上电源后,854启动后应该处在一个浮子被锁住的状态下(LT,BL或FR)。
可以通过PET或上位机向液位计发送UN指令将浮子放下。
建议同时检查ER(故障状态下重新启动)指令,应该为TGI1。
为方便用户,同时提供了一份液位计设置参数的拷贝,建议使用与液位计一起的塑料袋中的安装设置和维护表格。
调试的步骤(参见本章的其他部分)●检查安装情况●选择需要使用的工具●安装浮子并解开马达锁●设定罐、液位计和用户自己的数据●根据人工检尺的液位值标定液位计●通过854ATG测量浮子在空气中的重量,并且与提供的浮子重量进行比较。
●测量液位并且检查测量的重复性●平衡测试(BT)1.2 调试前的检查在854安装在罐上后检查液位计的机械安装情况。
检查液位计安装的方向,是否背向罐壁。
检查液位计的水平度是否小于2°。
检查O型圈和垫片是否完好。
检查未使用的电缆入口是否已经安装了符合标准的堵头。
检查电气安装情况。
检查854ATG是否已在罐体上接地。
检查854ATG电压选择器选择的电压是否与现场提供的电源一致。
检查854ATG的电源线是否已接好。
检查854ATG的通讯线是否接好。
检查本安侧电缆接线。
(标记成蓝色的端子)在送电前关闭所有的端盖。
1.3 工具在实验室和现场都必须使用847 PET Enraf手持终端设定参数。
可以通过854 ATG 的红外通讯口与PET通讯。
847 PET是一台本安的仪器,是防水的(IP65),带有全ASCII键盘和LCD显示器。
具体请参阅847 PET的操作说明书。
另外,Enraf还提供了专用的调试和维护工具可供选购。
伺服液位计安装及使用手册XTG_Rev1 4 (3)

恩拉福伺服液位计安装及使用手册版本:1.4 for XTG2006年9月目录854XTG伺服液位计 (5)1. 安装前准备 (5)1.1. 拱顶罐安装 (5)1.2. 内浮顶罐安装 (6)2. 854XTG的安装 (11)2.1. 安全 (11)XTG安全方面问题 (11)2.1.1. 8542.1.2. 人身安全 (12)2.1.3. 安全协定 (12)2.2. 基本注意事项 (13)2.3. 储藏和开箱 (14)2.3.1. 储藏 (14)2.3.2. 开箱和检查 (14)2.4. 机械安装 (15)2.4.1. 准备运输 (15)2.4.2. 过程连接 (15)液位计在罐上的安装方向 (16)2.4.3. 854XTG2.4.4. 螺栓 (16)2.4.5. 接地 (17)2.5. 电气安装 (18)2.5.1. 准备液位计的电气安装 (19)2.5.1.1. 外部保险丝 (19)2.5.1.2. 电缆密封和穿线导管 (19)2.5.1.3. 接地 (20)2.5.1.4. 接线端子室 (20)2.5.2. 非本安连接 (21)2.5.3. 可选的 RS 通讯连接 (22)2.5.4. 本安选项 (23)3. 854XTG液位计的调试和操作 (27)3.1. 介绍 (27)3.1.1. 测量原理 (27)3.1.1.1. 液位测量 (28)3.1.1.2. 两种产品间的界面 (28)3.1.1.3. 相对密度 (28)Page 2恩拉福液位产品安装及使用手册3.1.2. 可选的功能 (28)3.1.3. 远程显示 (30)3.1.4. 认证 (FM, CENELEC) (30)3.2. 安全 (31)3.2.1. 854高精度液位计安全方面的问题 (31)3.2.2. 个人安全 (32)3.2.3. 安全术语 (32)3.3. 调试过程 (33)3.3.1. 在调试前请检查以下各项 (33)3.3.2. 安装测量磁鼓和浮子 (34)3.3.2.1. 工具 (34)3.3.2.2. 安装测量磁鼓 (34)3.3.2.3. 安装浮子 (35)3.3.2.4. 给马达解锁(上锁) (35)3.3.3. 设置(配置) 液位计 (37)3.3.3.1. 设置部分的介绍 (37)3.3.3.2. 给 854 XTG上电 (40)3.3.3.3. 选择单位和格式指令 (40)3.3.3.4. 罐参数和液位计数据 (42)3.3.3.5. 设置报警 (45)3.3.3.6. 空尺的读取 (45)3.3.3.7. 密码保护 (46)3.3.4. 液位标定 (46)3.3.4.1. 标准的液位标定 (46)3.3.4.2. 用罐顶停止位置标定液位 (46)3.3.4.3. 用球阀的上表面来标定液位 (47)3.3.4.4. 界位的测量 (48)3.4. 操作 (50)3.4.1. 重复性测试 (50)3.4.2. 提浮子测试 (50)3.4.3. 停止和暂停指令 (50)3.4.4. 解除 (51)3.4.5. 界位的测量 (51)3.4.6. 投尺模式 (52)3.4.7. 校验液位 (53)3.4.7.1. 用罐顶浮子停止的参考位置来校验液位 (53)3.4.7.2. 用球阀表面校验液位计 (53)3.4.8. 数据指令与操作指令 (54)3.5. 日常维护 (55)3.5.1. 预防性维护 (55)3.5.2. 仪表端盖 (57)3.5.3. 鼓室 (58)3.5.3.1. 细节描述 (58)3.5.3.2. 拆除测量磁鼓 (58)3.5.3.3. 更换磁鼓轴承 (59)3.5.4. 电子部分 (60)3.5.4.1. 细节描述 (60)3.5.4.2. 拆除电子部分 (61)3.5.4.3. 更换软件 (62)3.5.4.4. 初始化 NOVRAM (62)3.5.4.5. 标定力传感器 (63)3.5.5. 基准编码器同步 (64)3.6. 故障诊断 (65)3.6.1. 浮子运动方面的问题 (65)3.6.2. XPU错误代码(指令 EP) (66)错误代码(指令 ES) (67)3.6.3. SPU状态的读取(指令 QS) (67)3.6.4. SPU附录 A ASCII码表 (69)附录 B 浮子 (70)附录C 854 XTG 伺服液位计备件 (71)Page 4恩拉福液位产品安装及使用手册854XTG伺服液位计1. 安装前准备1.1. 拱顶罐安装在拱顶罐上安装854XTG伺服液位计无需使用稳液管。
恩拉福伺服液位计手册XTG

恩拉福伺服液位计安装手册版本:1.1 for XTG2004年12月目录854XTG伺服液位计 (3)1. 安装前准备 (3)1.1. 拱顶罐安装 (3)1.2. 内浮顶罐安装 (4)2. 854XTG的安装 (5)2.1. 安全 (5)2.1.1. 854 XTG 安全方面问题 (5)2.1.2. 人身安全 (6)2.1.3. 安全协定 (6)2.2. 基本注意事项 (7)2.3. 储藏和开箱 (8)2.3.1. 储藏 (8)2.3.2. 开箱和检查 (8)2.4. 机械安装 (9)2.4.1. 准备运输 (9)2.4.2. 过程连接 (9)2.4.3. 854 XTG 液位计在罐上的安装方向 (10)2.4.4. 螺栓 (10)2.4.5. 接地 (11)2.5. 电器安装 (12)2.5.1. 准备液位计的电气安装 (13)2.5.1.1. 外部保险丝 (13)2.5.1.2. 电缆密封和穿线导管 (13)2.5.1.3. 接地 (14)2.5.1.4. 接线端子室 (14)2.5.2. 非本安连接 (15)2.5.3. 可选的RS 通讯连接 (16)2.5.4. 本安选项 (17)854XTG伺服液位计1. 安装前准备1.1. 拱顶罐安装在拱顶罐上安装854XTG伺服液位计无需使用导向管。
854XTG伺服液位计的过程连接为2”法兰连接,罐上过程连接可以是6”或者8”法兰,用户可以通过标定接头(Calibration Chamber)实施转接。
如下图:854 XTG 伺服液位计标定接头1.2. 内浮顶罐安装在内浮顶罐的应用当中,由于浮盘存在移动和转动的可能,为了保护测量钢丝不受浮盘的影响,我们建议用户安装稳液管。
稳液管的安装可以参考下图,对于不希望安装导向管的内浮顶应用,请询问厂家。
导向管安装要求:1.导向管必须竖直,从导向管顶部调挂重锤到导向管底,锤心距离中心偏差不超过3mm。
2.导向管必须准直,如果是用多节钢管焊接构成,则不得存在变径和弯曲。
enraf伺服液位计

enraf伺服液位计enraf 伺服液位计enraf, 液位计, 伺服恩拉福854ATG伺服液位计在石化产品储罐上的应用前言:恩拉福公司的伺服液位计是进入中国较早的高精度液位检测仪表,在客户的使用中得到好评。
在中原乙烯的一期工程原料产品罐区的建设中使用了35台854ATG伺服液位计,虽然中间出现过一些问题,但总的来说对这些伺服液位计的评价远远高于其它品牌的液位计。
由于采用了特殊的测量原理,所以在仪表对大高度测量,以及界面和密度的检测上有其它种类仪表不能比拟的良好性能。
通过多年的使用,现在就使用中应该注意的事项和一些问题的处理过程同大家进行一下交流。
测量的基本原理伺服液位计的测量原理如图所示:由力传感器检测浮子上浮力的变化。
浮子由缠绕在带有槽的测量磁鼓上的结实柔软的测量钢丝吊着。
磁鼓通过磁耦合与步进马达相连接。
浮子的实际重量由力传感器来测量。
力传感器测得的浮子重量与预先设定的浮子重量比较。
如果测量值和设定值之间存在偏差,先进的软件控制模块就会调整步进马达的位置,使浮子向下或向上移动,最终在力达到平衡的时候伺服电机停止转动。
1.1.1 液位测量产品液位的变化引起浮子浸没深度的变化,浮子所受的浮力同时也变化,浮力的变化被力传感器检测到。
测量值和设定值之间的的偏差引起步进马达位置的变化,升高和降低浮子的位置,直到测量值和设定值相等为止。
为了避免振动,软件还可以调整滞后作用和积分时间。
这样可以得到比较稳定和精确的平均液位。
步进马达每旋转一周大约使浮子上下移动10mm。
每旋转一周被分成200步,因此每步相当于0.05mm。
这直接决定了马达的分辨率。
同时不停地检测步进马达的位置。
这是通过安装在马达轴上的独特的码盘来实现的。
1.1.2 两种产品间的界面测量两种产品间的界面是通过向液位计发命令来实现的。
当你的设定点(一个浮子减浮力的一部分的值)等于浮子在两种液体受到的浮力的平均值的重量的时候,仪表就可以检测界面的位置。
854伺服液位计结构原理和安装

32
Document control number Honeywell Proprietary
854ATG伺服液位计磁鼓磁耦合
• 尺寸3 块磁铁构成 – 磁耦合滑步重量 1 kg – 磁耦合滑步检测 [WT] – 磁耦合校正 [CC] & [RM] • 与罐内气相完全隔离 – 安全 – 压力罐 – 危险的产品 • 保护测量重量的平衡系统 ..... – 机械震动和超重 • 磁鼓上的磁环 – 由永磁体做成 – 由两个轴承来支撑磁鼓 – 不要试图拆下磁环 – 保证磁环外观清洁
854ATG伺服液位计结构原理
伺服液位计调试
• 854ATG 液位测量精度 :≤ ± 0.4mm 灵敏度 :± 0.1mm • 854XTG 液位测量精度 :≤ ± 1mm • 灵敏度 :± 0.1mm
2
Document control number Honeywell Proprietary
33
Document control number Honeywell Proprietary
S
S N S N S N S
S N
N
N
伺服液位计工作原理
34
Document control number Honeywell Proprietary
伺服液位计测量原理-阿基米德原理
伺服液位计的测量原理可以分为称重和测距二个部分: 通常浮子重量为265g,当液位静止时,测量浮子处于被测液体的表面,测 量浮子的底部通常浸入液面1 ~2mm,所排开液体质量为15g。此时浮子受到 液体的15g浮力,钢丝上受力表现为265g-15g=250g。 当液位下降时,浮子所受浮力减小,钢丝上拉力增加,拉力的改变传达至 力传感器上,当SUP板检测到力传感器的称重变化,驱动伺服电机带动测量鼓 逆时针转动,伺服电机以0.05mm的步幅放下钢丝,计数器记录了伺服电机的 转动步数,并自动地计算出浮子的位移量,即液位的变化量。 当液位上升时,这个过程相反。 油水界面的测量,只要将平衡张力改为95g,测量浮子则会自动地穿过油 层到达油水界面,通过测量浮子的位移量,即可算出水位的高度。
霍尼韦尔伺服液位计调试说明书

• F2=+.13228396E+05
• F3=+.13934033E+05 • WT=EDE
输入频率2
输入频率3 重新设置张力保护
• EX
重新初始化液位计
伺服液位计维护
同步基准编码器
• 安装新的马达后,软件内部基准编码器位置必须与基准编码器的 位置同步。错误代码为ES553/ES555。按以下的步骤进行。 • W2=ENRAF2 首先进入密码保护2。密码为ENRAF2 • SM 进入维护模式,液位计重新启动。
和通讯方面的错误。EP=000没有错误。
• ES SPU板的错误代码,显示的是马达和浮 子移动方面的问题。ES=0000无错误。
• EM
• EH
功能板温度错误代码,EM=**00无错误。
功能板压力错误代码,EH =**00无错误。
伺服液位计维护
检查错误代码
• 常见错误代码
停住浮子
• BT
平衡测试,液位计磁鼓转一周的情况下测量浮子
的平均重量。这个过程大约需要5分钟。结束后 仪表显示FR
• BU
• BV
从内存中读取测得的最重的重量。
从内存中读取测得的最轻的重量。 当BU和BV的差值大于3g时,可以检查磁鼓运动 是否灵活,磁偶合是否良好。
• UN
释放浮子到液位测量I1模式
S [g]
25
25 75
25 150
25
225
伺服液位计维护
标定854 ATG液位计的力传感器
• W2=ENRAF2
• LT
首先进入密码保护2。
提起浮子,直到能看到浮子
• FR
• WT=DDD
伺服控制器调试说明(完成)

伺服控制器调试说明伺服控制器调试前必须做好以下两项准备工作:1.将静叶置手动状态,使用电磁阀关闭静叶,现场观测静叶应该向关小的方向动作。
静叶关到最小时,位置传感器的反馈电流应为4mA左右(不要求是准确的4mA)。
2.将静叶置手动状态,使用电磁阀开启静叶,现场观测静叶应该向开大的方向动作。
静叶开到最大时,位置传感器的反馈电流应为20mA左右(不要求是准确的20mA)。
开始调试:1.将静叶置手动状态,使用电磁阀完全关闭静叶,按手操器F1键,此时手操器屏幕上有“确定传感器新零点”字样,按回车键确认。
2.将静叶置手动状态,使用电磁阀完全开启静叶,按手操器F2键,此时手操器屏幕上有“确定传感器新量程”字样,按回车键确认。
3.同时按下手操器shift和F1键即F5键,此时手操器屏幕上有“设定K值”字样。
设置K值为1.0000。
此时将静叶置手动状态,使用伺服阀控制静叶,在静叶开度设置框中打入不同数字,现场观测静叶应该可以动作。
如果静叶不动作,请将K值设定为-1.0000。
K 值只能为1.0000或-1.0000。
更改K值先同时按shift和F1,再按回车键,此时K值的末位数字闪烁,按下shift不放同时按上下键可以将光标左右移动。
单按上下键可以改变光标所在位的数字。
4.将静叶置手动状态,使用伺服阀控制静叶,在静叶开度设置框中打入0.0,现场观测静叶应该关到最小。
此时按下F3键,此时手操器屏幕上有“确定指示电流新零点”字样,按回车键,更改此值为6400.0,按回车键确认。
通过增加或减小指示电流零点的值使电脑中显示静叶开度为0.0~0.5%。
5.将静叶置手动状态,使用伺服阀控制静叶,在静叶开度设置框中打入100.0,现场观测静叶应该开到最大。
此时按下F4键,此时手操器屏幕上有“确定指示电流新量程”字样,按回车键,更改此值为32000.0,按回车键确认。
通过增加或减小指示电流量程的值使电脑中显示静叶开度为99.5~100.0%。
伺服液位计操作规程

伺服液位计操作规程说明:在进行伺服液位计标定时,自动化监控软件界面的10具20000m3油罐数据信息停止采集,不作为实际数据显示。
Enraf伺服液位计各功能操作步骤注:在进行伺服液位计操作之前,需要进行以下接线:1.将控制柜内蓝色CM-CIU模块的(R)+Vs线拆下(如右图,右侧数起第二根红色线),不要与任何物体接触,此时此模块无红色数字显示;2.将计算机后面的9针串口接头连接好。
只有保证以上接线完全正确时才能进行下面的操作。
蓝色CM-CIU模块一、Ensite软件使用:(ENSITE 要拷贝到D盘根目录下,并设置COM1口的通讯端口1200,7,ODD(奇),停止位为1,流量控制无)1.双击Ensite;2.单击setup,选择BAUDRATE为1200,PORT为COM1,然后点击SA VE;3.单击scan,选择BAUDRA TE为1200,PORT为COM1,CIU ADDRESS为ALL,点击OK,.等到扫描结束,保存扫描到的仪表,并输入文件名;4.单击ALL(添加所有的仪表);5.单击ENCASE进入调试界面6.单击SPLIT=OFF,变成SPLIT=ON(作用:分屏显示);7.用SELECT选择所要调试的仪表。
二、标定液位1.在REQUEST下的输入框中输入I1,直到浮子找到液位为止,界面显示I NN为找到,如果显示!!!为没有找到;2.继续输入W2=ENRAF2,然后按下回车键;3.输入RL=+***.****(此值为手工检尺数值),再按下回车键;4.再输入AR(表示接受此液位为当前参考液位);5.液位标定完成。
6.此时液位计会重新启动,仪表指示执行I1,直到找到液位。
确认此时的液位计值与手工检尺值保持一致(差别在+_1毫米之内即可)。
如果显示值和手工检查值不一致,重复上面1,2,3,4,5的操作,直到手工检尺和仪表显示值一致。
三、标定油水界面特别注意:在标定水位之前,液位已经准确的标定完毕。
Honeywell Enraf Servo 854 954罐位器升级指南说明书
MAKE YOUR BEST SERVO, EVEN BETTERHoneywell’s Enraf Servo 854 tank gauges have been market leaders for over 30 years, with more than 65,000 installed worldwide. We continue to invest in this flagship technology and today offer an even more powerful version of its leading servo gauge, along with acost-effective way for customers to upgrade.The new Enraf Smart Servo 954 uses our established measurement technology, but with new electronics and advanced software algorithms todeliver enhanced performance in even more challenging applications.Now Honeywell is offering an easy path to the latest technology. TheServo 954 migration kit provides a simple, safe and cost-effectiveway to refresh the electronics and firmware while keeping existingtank infrastructure to minimize costs and downtime.WHY MIGRATE?Upgrading brings existing 854 Servo customers a range of benefits:-Invest in latest technology to maximize the product lifecycle-Compliance to the latest safety and legal metrology standards-Additional functionality and options, including extended calibrated level and temperature ranges, density profiles upto 50 points, and enhanced connectivity and diagnostics.-Elimination of obsolescence risks including increased maintenance costs and a rising risk of downtime. -Continued support and ready availability of spares for uninterrupted operations.FEATURES AND BENEFITSTackle the Risks of Obsolescence -Replaceend-of-life solutions -Avoid increased maintenance costs and downtime risk -Ensure continued support and spare Cost-EffectiveMigration-Full migration orMigration Kit-Retain cabling,calibration chambers,VITO interfaces,probes and pressuretransmittersImproved Complianceand Safety-SIL certificationfor safety loops-Latest NMi approvals-OIML R85 and API3.1B complianceNew Features-Patented algorithmsfor increased precision-Adaptive dynamiccompensations-Advanced drumcalibration-Lowest safetydiagnostics cycle timeLow Lifecycle Costs-Reuse many 854 parts-Modular design forease of maintenance-Faster commissioningfor reduced downtimeEnraf Servo 954 Migration SolutionEN-21-02-ENG | 02/21© 2021 Honeywell International Inc.For More InformationTo learn more about Honeywell’s Enraf tank measuring technology visit or contact your Honeywell Account Manager.Honeywell Process Solutions 2101 CityWest Blvd,Houston, TX 77042Honeywell House, Skimped Hill LaneBracknell, Berkshire, England RG12 1EB UK Building #1, 555 Huanke Road, Zhangjiang Hi-Tech Industrial Park, Pudong New Area, Shanghai ENRAF SERVO 954 OVERVIEWHoneywell Enraf Servo 954 is our most advanced automatic tank gauge yet. We’ve taken the proven measurement technology of our flagship gauges and added improved electronics and software. With increased intelligence it stands up to the most demanding process conditions.Designed for measuring all kinds of liquids in any storage tank, Servo 954 is reliable, versatile and accurate. New enhancements mean the industry’s best tank gauging solution is now even better: -Patented algorithms andmeasuring principle for improved precision in all applications -Adaptive dynamic compensations to improve measurement under adverse conditions-Patented force transducer technology to optimize stable operation -Advanced drum calibration for guaranteed accuracy -“SIL -by-design” features with unique diagnostics for reliable operation (IEC 61508)-Safety approvals and certifications from legal metrology institutesworldwide, with NMi approvals and OIML R85 and API 3.1B compliance -Faster commissioning to get you up and running more quickly.WHO IS THIS MIGRATION FOR?We strongly recommend that all existing customers upgrade tobenefit from continued support and improved performance. That includes but is not limited to customers with the following products:-854 series servo gauges from 1989-1997 with a Cenelec (or FM) safetyapproval that are non-CE and non-Atex. -The 854 series from 1997-2003 with Cenelec/CE but non-ATEX. -801/802/811 series servos. -854 series from 2003-present day -Customers with a digitalization strategy who are seeking actionable insights from higher resolution tank storage data -Customers with a maintenance strategy that includes predictive diagnostics for improved asset availability -Customers who are pursuing aremote service strategy where Enrafexperts can diagnose and guide by cyber-secure remote connection.MIGRATION OPTIONSWe offer two migration solutions so customers can choose the option that best meets their requirements: -Full Migration, replacing the existing gauge with a new Enraf Servo954, while retaining the calibration chamber, cabling, VITO interface, VITO probes, and pressure transmitters -The Migration Kit, replacing only on-site electronics andsensitive mechanics while retaining the drum compartment, enclosure, calibration chamber, cabling, VITO interface, VITO Probes, and pressure transmitter.Speak to us today and we’ll help you find the best path for you to our latest technology and a better operation.。
恩拉福伺服液位计安装手册XTG_Rev1[1].8 - 带780 SmartLink
![恩拉福伺服液位计安装手册XTG_Rev1[1].8 - 带780 SmartLink](https://img.taocdn.com/s3/m/b1c7ea34a32d7375a41780ed.png)
稳液管安装要求: 1.稳 液 管 必 须 竖
直,偏心度不超 过 3mm。否则液 位计可能无法正 常工作。 2.稳 液 管 必 须 笔 直,如果是用多 节钢管焊接构 成,则不得存在 变径和弯曲。焊 接必须使用套 焊。整个导向管 在罐底的投影必 须是与管径一致 且无变形的正 圆! 3.稳液管内部必须 光滑没有毛刺, 焊缝必须清除干 净;开孔后必须 将毛刺清除干 净。
注意 在打开电气室和其他所有盖子之前,应解
除所有固定盖子的装置: ‘B’: 固定端子室盖子的装置; ‘A’: 固定电气部分盖子的装置。
图6
Page 14
恩拉福液位产品安装及使用手册
. 2.4.1. 准备液位计的电气安装 检查电源选择器选择的电压与 854XTG 标签以及现场所提供的电压是否一致。 854 XTG的电源电压是110, 130, 220 or 240 Vac. 电源功率 25 VA; 频率: 50 - 60 Hz. Imax = 2 A 电压变化范围允许 +10 % 到 -20 %
Page 4
导向管底部安装结构,如果用户需要在导向管内进行 人工投尺,则可以在导向管底部安装投尺板,喇叭口 的功能是为了防止浮子卡在缺口内。
恩拉福液位产品安装及使用手册
. 导向管加工照片:
导向管的对接需要放置在一根工字槽钢上进行焊接,只有这样才能保证焊接出来的管子竖 直,也可以将两根 9 米长的管子固定在一起,将待焊接的管子放置在两根固定的管子上焊接。
注意:220~交流电源线只能由如图右侧的 非本安电缆入口进入
图7 2.4.2. 非本安连接
电源电缆
:
Enraf 现场总线路:
必须能够满足854 XTG 的电源功率, 并且允许在危 险场合使用。 建议使用一根双绞屏蔽电缆。Rmax = 200 Ω/ line;
伺服液位计调试讲解

伺服液位计调试完整过程
新表设置步骤4
MH=+016.8000
<回车>
MZ =+016.8000
<回车>
DW =+. 26545340E+03 <回车>
S1 =+. 25000000E+03 <回车>
MN=09
<回车>
EH
功能板压力错误代码,EH =**00无错误。
伺服液位计维护
检查错误代码
常见错误代码 ES = 407 力传感器故障 马达没有解锁。力传感器与马达相连的钢丝可能断
了。如果不是这样就必须更换力传感器。新的力传 感器必须标定。 ES = 605 钢丝上没有张力 马达没有解锁,测量钢丝可能断了,浮子已经丢失。 ES = 606 耦合同步错 磁鼓位置和内部计数位置不匹配。检查:WT = ED 或 EDE
能标定。
取下浮子,挂上25g的砝码。
BT
开始平衡测试,这过程大概需要5分钟。 。
854 ATG将测量磁鼓转动一周下平均的25g的频率。
BF
当平衡测试结束时,读取频率值。
这时不要将此值输入液位计。在所有的标定结束后,一起输入到液位 计中。
伺服液位计维护
标定854 ATG液位计的力传感器
重复标定步骤使用其他3个砝码,F1(25+75g)、 F2(25+150g)、F3(25+225g)。
注意:375连接压力变送器时候,要关闭液位计的Hart通讯 W2=ENRAF2 SR 等375修改好变送器参数后输入EX
854_伺服液位计-Enraf

U815C/260/S/90
浮子材质:AISI 316,重量:260 g,最大压力:20 barg,直径:90 mm
U815C/260/S/45
浮子材质:AISI 316,重量:260 g,最大压力:20 barg,直径:45 mm
标定接头
标定接头 铸铝材质(GAlSi7MgWa) 最大工作压力 0.6 Mpa 2" ~ 6" 150 lbs ff, 铸铝, Ra 3.2-12.5 µm 2" ~ 8" 150 lbs ff, 铸铝, Ra 3.2-6.3 µm DN 50, PN 6 ~ DN150, PN 16, DIN 2526 Form B, 铸铝 DN 50, PN 6 ~ DN200, PN 16, DIN 2526 Form B, 铸铝
测量原理
854 伺服液位计的测量基于: 1)阿基米德原理; 2)高精度力传感器; 3)高精度伺服电机系统和测量磁鼓
测量磁鼓
高精度力传感器
测量浮子
伺服电机系统
测量过程:
1. 854 伺服液位计的测量基于阿基米德原理。测量浮子处于被测液体的表面,测量浮子的底部 通常沉入液面 1 ~2mm。此时,测量浮子受到其本身的重力和液体的浮力(阿基米德浮力原 理),在测量钢丝上则表现为测量浮子所受重力和浮力之合力,即测量钢丝上的张力。
2. 当液位静止时,测量浮子处于相对静止状态。此时,测量钢丝、测量鼓及力传感器以杠杆滑 轮原理构成力平衡,工厂给定静止状态下测量钢丝上的张力为 208g,高精度力传感器不断地 检测到平衡张力是否为 208g 。
3. 当液位下降时,测量浮子所受浮力减小,则测量钢丝上的张力增加,力传感器立即检测到这 一变化,控制器随即发出命令,伺服电机带动测量鼓逆时针转动,伺服电机以 0.05mm 的步 幅放下测量钢丝,测量浮子不断地跟踪液位下降的同时,计数器记录了伺服电机的转动步 数,并自动地计算出测量浮子的位移量,即液位的变化量。
E H伺服液位计操作简介
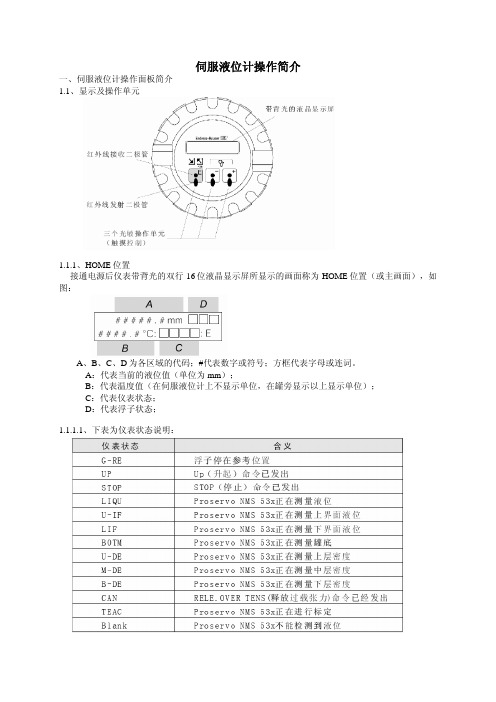
伺服液位计操作简介一、伺服液位计操作面板简介1.1、显示及操作单元1.1.1、HOME位置接通电源后仪表带背光的双行16位液晶显示屏所显示的画面称为HOME位置(或主画面),如图:A、B、C、D为各区域的代码;#代表数字或符号;方框代表字母或连词。
A:代表当前的液位值(单位为mm);B:代表温度值(在伺服液位计上不显示单位,在罐旁显示以上显示单位);C:代表仪表状态;D:代表浮子状态;1.1.1.1、下表为仪表状态说明:1.1.1.2、浮子状态说明1.2、按键说明:伺服液位计为光敏按键,操作时不用打开表壳就可完成操作:提示:z如果超过10分钟仍无键被按,液晶屏就会回到起始位置。
z用“+”或“-”键分别增加或减小数据,如果连续按“+”或“-”键,则最低位的数据首先改变,在最低位的数据经过一个循环后,第二低位的数据将会改变,在第二低位的数据经过一个循环后接着是第三位数据,依此类推。
如果从触摸控制玻璃屏上移开手指,操作过程将从最低位数据又重新开始(类似机械计数器)。
z在液晶屏的最底部有一条横线,正好横在三个按键的上方,当按压按键时按键上方的横线会断开,这表明该按键已经起作用。
1.3、操作说明:通过操作编程矩阵来选择静态和动态矩阵组、功能组和各项功能1.4、矩阵结构说明:编程矩阵由多个矩阵组构成,也就是一个静态矩阵和多个动态矩阵,在编程矩阵中的每个矩阵组、功能组和功能都可以通过触摸操作单元来选择,如图所示。
二:操作2.1、设定密码在“HOME”状态下按压“E”键大于3秒,进入矩阵,首先显示的是“Measured Value 1”(测量值 1),间断的按压“+”键直到画面显示“More Function”(功能选择)然后按压“E”键进入,然后间断按压“E”键直到进入功能“GVH=039 ACCESS CODE”(功能位置为:GVH=039,访问代码)。
默认值是“0”,按“+”键第一个数字由“0”增加到“9”然后又跳回“0”后,第二个数字开始由“0”增加,当增加到“4”后移开手指,然后数字会自动跳到“5”(有一点滞后),此时数字为:“50”, 轻轻地再按“+”键一次将最低位由“ 0”变成“1 ”,数字就成了“51”,此时再按“E”键,将显示“EDITING ENABLE”(允许编辑),密码设定完毕,然后再次按压“E”键。
4.854伺服液位计结构原理

伺服液位计调试
• 854ATG 液位测量精度 :≤ ± 0.4mm 灵敏度 :± 0.1mm • 854XTG 液位测量精度 :≤ ± 1mm • 灵敏度 :± 0.1mm
2 Document control number Honeywell Proprietary
854系列伺服液位计
测量原理
磁鼓 力传感器
伺服机构
一般伺服液位计
(模拟方式、采 用霍尔元件)
22 Document control number
浮子
Enraf伺服液位计 (完全数字化)
Honeywell Proprietary
854ATG液位计安装的电气要求
• 在 854 XTG 上方的接线端子室分为蓝色本安(Intrinsically safe part)和 非本安两部份(Non-intrinsically safe part),电缆入口为3/4” NPT。 • 注意:220~交流电源线只能由如图左侧的非本安电缆入口进入
F = 15g
19 Document control number Honeywell Proprietary
854ATG伺服液位计工作原理
• 吊浮子的钢丝缠绕在磁鼓表 面的槽中 • 马达单元安装在磁鼓的轴上 • 马达单元将力距传递到力传 感器 • 力传感器将力距转变成频率 信号 • SPU(伺服处理单元)从力传 感器接收频率,通过马达控 制浮子的位置
5 Document control number Honeywell Proprietary
防雷保护
6 Document control number Honeywell Proprietary
854伺服液位计简单操作过程

854ATG/XTG伺服液位计简单操作手册一、 液位计操作:液位计操作指令如下:1、TG 自检测试液位计是否工作正常,TG操作后浮子会提升近100mm,然后再落到液面上,应该和测试前测量的液位相差在1mm内。
2、LT、CA 提升浮子LT是提升浮子到量程上限(超过高液位报警),CA是提升浮子到最高处,标定底座内部。
3、FR 停止停止浮子运行。
4、UN 取消、释放取消LT、CA、BT、FR、BL、GU、GD等命令。
5、RS 热重启重新启动液位计6、3A 查看显示输入3A可以查看液位计的浮子位置、工作状态、温度信息。
二、 液位计工作模式:1、I1 油位测量受到S1控制(钢丝受力达到S1设置重量停止浮子运行)2、I2罐底测量受到S2控制(钢丝受力达到S2设置重量停止浮子运行)3、I3 水位测量 受到S3控制(钢丝受力达到S3设置重量停止浮子运行)4、TP伺服密度测量 密度测量后液位计会自动回复到密度测量前的工作状态。
读取密度使用SC指令。
三、 液位修正:1、3A 查看显示+003.8145 m INN 必须后面显示INN+003.38℃I1 必须后面显示I1,才能修改液位,2个条件都必须满足。
2、W2=ENRAF2 输入液位计修改参数的密码。
3、RL=+009.3210 如手工检尺的液位如9.321米,就直接输入。
必须带+号,小数点前3位后4位,不足用0补齐。
4、AR 输入AR后,液位计会将RL设置写入内存,自动重启。
四、 伺服密度修正(需要液位计带有密度测量功能):如:仪表伺服密度为:875kg/m3,手工密度为:860 kg/m3密度偏移量A2=手工密度-伺服密度=860-875=-151、W2=ENRAF2 输入液位计修改参数的密码。
2、A2=-.15000000E+02 此为浮点数,数字一共8位,以E结尾,+02表示小数点后移2位,就是十进制的数。
3、EX 退出注:在密度修正后再次测量伺服密度,发现修正后的测量值和原来还是有一定偏差,可以继续叠加修正。
恩拉福伺服液位计安装及使用手册XTG_Rev1.6
Page 2
恩拉福液位产品安装及使用手册
.
3.1.2. 3.1.3. 3.1.4. 3.2. 3.2.1. 3.2.2. 3.2.3. 3.3. 3.3.1. 3.3.2. 3.3.2.1. 3.3.2.2. 3.3.2.3. 3.3.2.4. 3.3.3. 3.3.3.1. 3.3.3.2. 3.3.3.3. 3.3.3.4. 3.3.3.5. 3.3.3.6. 3.3.3.7. 3.3.4. 3.3.4.1. 3.3.4.2. 3.3.4.3. 3.3.4.4. 3.4. 3.4.1. 3.4.2. 3.4.3. 3.4.4. 3.4.5. 3.4.6. 3.4.7. 3.4.7.1.
3.
854XTG 液位计的调试和操作 .......................................................................... 27
3.1.
介绍.................................................................................................................. 27
2.5.1.2. 电缆密封和穿线导管......................................................................................... 19
2.5.1.3. 接地.................................................................................................................. 20
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Dens.obs.
其中: P7
P7 1 Level LP LG
: : : : : : :
[kg/m ] (P1 – P3)+ corr 压力变送器 P1 的压力 [Pa] 压力变送器 P3 的压力 [Pa] 各种修正系数 压力变送器 P1 到罐零位的距离 [m] 本地的重力加速度 [m/s 2 ] 液位计测量的液位 [m]
5,HIMS 密度设置:
HIMS 密度的测量原理: 通过罐底的压力变送器 P1 测量 P1 以上液柱的静压 h、罐内的气相压力(通过 P3 测量)参见 下图。 在 P1 以上的液位高度为 h,通过液位计测量的液位减去 LP 的值。LP 是 P1 压力变送器相对于 罐参考零点的高度。 产品新的液位计送电后会显示+027.0000,这是出厂的设置。输入 FR 停住浮子,检查 DC(磁鼓周 长是否和磁鼓上刻的是否一致) 。 输入: W2=ENRAF2 指令输入密码 LD=M DP=. 液位格式:+XXX.XXXX,单位:米 小数点间隔符号
DW=+.26540000E+03 预设浮子的重量(数值刻在浮子上) DV=+.20040000E+03 设置浮子体积(数值刻在浮子上) S1=+.20800000E+03 预设测量液位(I1)时钢丝张力的平衡值 注意: 伺服液位计的工作原理是根据力平衡测量的,即浮子的重量=浮力+钢丝的张力。在这里浮子的重量 是一个固定的值,液位计根据检测出的张力大小升降浮子寻找浮力的平衡点,最终使检测到的张力 等于设定的张力(S1,S2,S3) ,当二者相等的时候,伺服电机停止转动。因此对于液位检测来说这 个张力的设定值应该是 S1=DW-1/2DV×ρ(浮子重量减去最大浮力的一半) 。 S2=+.05000000E+03 设定浮子到罐底(I2)钢丝张力的平衡值 注意:这是 为了避免使用 SM(维护命令)对力传感器失去保护作用而采用的降浮子命令。因为 50 远远小于 DW-1/2DV×ρ(浮子重量减去最大浮力的一半),因此在浮子完全淹没的情况下检测到的张力还小于 张力设定值,浮子要继续下降以求增大浮力寻求平衡,因此它会一直降到罐底。可以把 S3 设为大 于浮子实际重量的一个值,但是要首先把浮子的重量也设为大于实际重量的值, 及始终保持 Sx<DW, 否则液位计初始化会出错,因为实际上钢丝的张力永远不会大于浮子的重量,伺服液位计本身也永 远不会知道浮子的重量是多少,因此我们可以告诉液位计一个虚假的浮子重量, 但是不能使 Sx>DW。 TA=03 新的仪表地址(原先是 00) TI=TK-003 输入罐的编号,空格补齐 6 位 WT=EDE 力传感器保护 注意:这是对力传感器的 保护,以防止电机过度用力损坏力传感器。当 WT=DDD 的时候,伺服液位计失去力传感器的保护。 张力大于 380g 或者小于 20g 的时候,伺服液位计会停止升降进入力传感器保护状态。有些命令直 接是没有力传感器保护的,比如 GU/GD。
液相 PT100 安装位置 汽相 PT100 安装位置
16
MK、MO 时请根据平均温度计铭牌上的参数和如下图的产品规格设置: 任何时候当温度不能正常显示,请查询 EM
4、伺服密度设置:
首先输入 SV 指令,查看伺服液位计软件版本是否包含 SPUD2.2,如果包含的是 SPUB2.2,则 不具有测量伺服密度功能。设置: DI=K (密度单位设置,默认值为 K-Kg/m3) DW=BW (对浮子进行平衡测试 BT,确保 BU-BV<3g,将 BW 值输入 DW) DV=+.20520000E+03 (浮子的体积刻在浮子上,单位:cm3)
DB=+000.3000 (最高密度测量点 D9 的中点,距液面 0.3m) DZ=+000.3000 (最低密度测量点的中点,距罐零点 0.3m) SD=D or U (密度测量方向,D 从上至下,U 从下至上) 指令 D0 – D9,每个密度测量点的中点 指令 R0 – R9,对应点测量的伺服密度 SC 查询十个测量点密度的平均值,只有当所有密度点测量完成时才能查询 伺服密度的内部计算公式: 其中: R = measured servo density n (n: 0 .. 9) A1 = density scale factor A2 = density offset factor [kg/m3] RF = ambient air density [kg/m3], default value +.12250000E+01 Wire tension = tension in the measuring wire, measured by the force transducer 伺服密度正常情况下是不需要修正的,如果伺服液位计测量的伺服密度和检尺数据相差太大, 需要和相关 ENRAF 调试工程师联系,帮助分析原因,确定修正方案。 从伺服密度的计算公式可以看出,可以通过调整 A1(比例系数)和 A2(偏移量)修正伺服密 度。 A1new=A1 *(R-RF-A2)/(Rsc-RF-A2) A2new= A2+(R-Rsc) 其中: R = 计量员检尺的平均密度 Rsc = 伺服液位计测得的平均密度
Enraf 854 伺服液位调试手册
1、 ENSITE 调试软件安装和基本操作:
液位计安装完成后,确认接线正确,就可以送电了。 将 ENRAF 提供的调试软件 ENSITE 直接 COPY 到 D 盘, 打开 ENSITE 文件夹中的可执行文件 ENSITE.EXE,按 ALT+回车全屏化。 点击 SCAN 后,选择 1200(CIU 的通讯波特率) ,COM1,ALL 后按 OK。搜索完成后所有的 现场仪表都显示在列表中,输入新的文件名,按确认就可以开始调试了。 单击 ALL 将所有表添加到右侧列表中,单击 ENCASE,进入调试界面,按 SPLIT=OFF 打开显 示窗口,SELECT 可以任意切换罐,REQUEST 是指令输入窗口,SEND 送出指令。 指令送出后显示&表示成功,显示!058 或者!053 表示失败。 当然,调试同样可以使用手操器 PET 在罐上进行。所有指令都完全一一样。 当 调 试 完 液 位 计 后 , 单 击 左 侧 的 LOG , 将 液 位 计 的 所 有 设 置 备 份 到 相 应 文 件 下 : “D:\ENSITE\DAT\文件名\罐名” 。
输入 CA 的高度。 输入高高报警液位 输入高报警液位 输入低报警液位 输入低低报警液位 输入 MH=TT-0.2 米的值 输入 MH=TT-0.2 米的值 输入 BW 的值 S1=DW-15 克
界位的测量: 界位命令 3 (I3) 被用于测量产品和水的界位 (命令2 (I2) 可以用于测量另一个界位)。设 定值 S3 被设定在浮子一半浸没在水中,一半在产品中的位置。 可以按照以下方法计算 S3 = DW - (1/2DV x
这样就调试好了液位计。 液位计的显示格式如下:
如果 tt 位置显示 FL,查温度板错误代码 EM,将返回值发给相关调试人员;如果 ss 位置显示 FL,查伺服板错误代码 ES,将返回值发给相关调试人员,以便查找出错原因,确定解决办法。
3、温度设置:
1) 、单点温度: 接入单点温度计三限制 PT100,a、c、b 接入液位计 1、2、3 端子,设置: W2=ENRAF2 TD=C C: °C(默认) F: °F MN=03 (三线制 PT100) MO=+000.2000 (假设 PT100 的安装位置离罐参考零点 0.2m) EX 2) 、两点温度: W2=ENRAF2 MT=SPL J0=+000.3000 J1=+007.0000 EX 3) 、三点温度: 4) 、平均温度计 W2=ENRAF2 MN=09 or MK=+009.0000 MO=+000.2000 EX
产品
+1/2DV x 水 ) [g]
其中: S3 : I3 测量的设定点 [g] DW : 浮子重量 [g] DV : 浮子体积 [cm3]
product : 产品密度 [g/cm3]
watert : 水的密度 [g/cm3]
例如: 浮子型号 #0815.343 : ø45 mm 浮子重量 (DW) : 223 g 浮子体积 (DV) : 105 cm3 底部圆锥部分体积 : 3.2 cm3 底部圆锥部分高度 : 6 mm 产品密度 : 0.9 g/cm3 S3 = 223 - (52.5 x 0.9 + 52.5 x 1) = 123.25 [g] 必须给出当浮子的一半浸没在水中时液位的偏移量。浮子在测量产品液位时浸没的深度会小一 些。两者间不同的浸没深度必须输入到指令 L3中。 例如: 1) 在产品液位表面的浸没深度: 浮子体积 : (DW - S1)/ product = 15/0.9 = 16.67 cm3 圆柱部分的体积 : 16.67 - 3.2 = 13.47 cm3 圆柱部分的浸没深度 : 13.47/лr2 = 13.47/(л x 2.252) = 0.85 cm = 8.5 mm 产品中的浸没深度 : 8.5 + 6 = 14.5 mm 2) 产品和水的分界面: 水中的圆柱体积 : 1/2DV - 3.2 = 52.5 - 3.2 = 49.3 cm3 水中的圆柱高度 : 49.3/лr2 = 49.3/(л x 2.252) = 3.1 cm = 31 mm 产品和水的分界面位置 : 31 + 6 = 37 mm (from lower end of displacer) 因此,液位的偏移量 L3 为 : 37 - 14.5 = 22.5 [mm] 指令 名称 描述 W2= 保护级别2 进入保护级别2(缺省的密码:ENRAF2) S3= I3的设定值 标准的浮点格式,单位:克。这是产品和水的界面测量 的设定点。 L3= 液位的偏移量L3 格式参照 LD的规定。液位的偏移量在界面1 (液位计标 定的位置)和产品/水的界面中的浸没深度之间。 EX 退出 退出保护级别