基于磁敏技术的位移传感器的设计
磁传感器位移感应校准算法-概述说明以及解释

磁传感器位移感应校准算法-概述说明以及解释1.引言1.1 概述磁传感器是一种用于测量磁场的器件,通过感知周围环境中的磁场变化来获取相关的信息。
在工业自动化、车辆导航和生物医学等领域,磁传感器被广泛应用。
然而,由于环境条件的复杂性和传感器本身的误差,磁传感器的准确性受到一定的限制。
位移感应校准是磁传感器应用中的一个重要环节。
由于磁传感器的测量值容易受到外部磁场干扰和传感器本身误差的影响,因此需要进行校准以提高测量精度。
位移感应校准算法是一种校准方法,通过分析磁场数据的变化和模式来修正传感器的测量误差,从而实现更加准确的位移测量。
本文旨在探讨磁传感器位移感应校准算法的原理和方法。
首先,介绍磁传感器的工作原理和应用领域。
接着,阐述位移感应校准在磁传感器应用中的重要性和必要性。
随后,探讨了目前磁传感器位移感应校准算法的研究现状,并提出了一种新的校准算法,详细阐述其原理和方法。
通过本文的研究,预计可以进一步提升磁传感器的位移测量准确性,为相关领域的应用提供更可靠的数据支持。
此外,研究成果还有望为磁传感器位移感应校准算法的设计和优化提供借鉴,促进相关领域的技术进步和应用发展。
接下来,本文将详细介绍磁传感器的原理和应用,以及位移感应校准的重要性。
同时,对磁传感器位移感应校准算法的研究现状进行深入的探讨,并详细阐述提出的校准算法的原理和方法。
【1.2 文章结构】本文将按照以下结构来组织和展开内容:第一部分为引言,包括概述、文章结构和目的。
在概述部分,将简要介绍磁传感器位移感应校准算法的背景和基本概念。
文章结构部分将给出本文的整体组织框架,以及各个部分的主要内容和目的。
在目的部分,将明确本文的研究目标和意义。
第二部分为正文,包括磁传感器的原理和应用,以及位移感应校准的重要性。
在磁传感器的原理和应用部分,将详细介绍磁传感器的工作原理和主要应用领域,为后续讨论和分析提供基础知识。
在位移感应校准的重要性部分,将强调位移感应校准在磁传感器应用中的重要性和必要性,以及对传感器性能和测量精度的影响。
基于磁学效应的新型非接触式位移传感器研究
基于磁学效应的新型非接触式位移传感器研究近年来,随着生产自动化和智能化的不断推进,传感器作为一种重要的控制元件,成为了不可或缺的一部分。
传感器的种类和应用也越来越多,其中非接触式位移传感器因为其非接触式测量、高度灵敏、不受磨损等优点,被广泛应用于机械制造、航空航天、电子信息等领域。
本文将介绍一种基于磁学效应的新型非接触式位移传感器,重点探讨其原理、特点和应用前景。
一、基本原理这种传感器的测量原理是基于磁学效应,利用电力学中的法拉第感应定律,通过探头和待测物体之间的磁感应线,实现对待测物体位移、速度、加速度等参数进行测量。
其结构相比其他类型的传感器相对简单,由传感端和信号处理端组成。
其中,传感端由探头和磁场发生器组成,探头感测磁场信号,而磁场发生器提供稳定的磁场。
信号处理端由数据采集模块、信号调理电路和控制单元等组成,完成信号的处理。
二、主要特点相较于其他类型的传感器,基于磁学效应的新型非接触式位移传感器具有以下主要特点:1. 非接触式测量该传感器采用非接触式测量方式,避免了因磨损和接触误差导致的测量精度下降问题。
同时,由于不需要直接接触待测物体,也解决了因潜在磨损和材料疲劳而导致的传感器损坏问题。
2. 高灵敏度基于磁学效应的新型非接触式位移传感器具有高灵敏度的特点,能够感测微小磁场的变化,对待测物体进行高度精确的测量。
3. 适应性强该传感器适应性强,可适用于不同工况环境下的测量。
同时,采用数字信号处理技术,可有效抑制来自外部环境的干扰信号,提高测量精度。
4. 响应速度快相较于其他类型的传感器,该传感器响应速度快,且支持实时测量。
其快速而准确的响应,使得其在自动化生产过程中起到了重要的作用。
三、应用前景基于磁学效应的新型非接触式位移传感器具有较高的性价比,适用范围广,被广泛应用于机械制造、航空航天、电子信息等领域中,其应用前景广阔。
例如,在航空航天领域中,该传感器被广泛应用于飞机发动机、液压系统及舱门等地方的位移和液位测量。
磁致伸缩位移传感器研制
早期磁致伸缩位移传感器的研制磁致伸缩位移传感是利用磁致伸缩效应研制的传感器。
该传感器可以实现非接触、绝对式测量,具有高精度、大量程的特点,特别是由于磁铁和传感器并无直接接触,因此传感器可应用在恶劣的工业环境,如易燃、易爆、易挥发、有腐蚀的场合。
此外,传感器能承受高温高压和高振荡的环境。
传感器输出信号为绝对数值,所以即使电源中断重接也不会对数据收构成问题,更无尖重新调整零位。
由于传感器组件都是非接触的,所以即使测量过程理不断重复的,也不会对传感器造成任何磨损。
研制中涉及的关键技术有:(1)大电流周期激发电路的设计;(2)微弱信号的检测、信号的滤波、放大、电压比较、峰值检验波、电压限幅等一系列电路的设计;(3)基于单片机的高精度时间量测量。
技术要求:测量范围0~8cm,精度0.1mm。
测量范围不是很大,主要是受到实验所用波导钢丝本身长度的限制。
1位移传感器的原理磁致旋转波位移传感器,如图1所示。
除位置磁铁外,所有其他元器件都安装在传感器壳体内,组成传感器的主体。
位置磁铁通常装在一个运动部件A上,而传感器主体则装在一个固定的部件B上。
传感器工作时,电子信号和处理系统发给磁致波导钢丝间隔为T的激励脉冲电流ie 该脉冲电流将产生一个围绕波导钢丝的旋转磁场。
位置磁铁也产生一个固定的磁场。
根据Widemanm效应,金属随其瞬间变形产生波导扭曲,使波导钢丝产生磁致弹性伸缩,即形成一个磁致旋转波。
磁致旋转波的传播速度为式中:G为波导管的剪切弹性模量;ρ为波导管密度。
由于G和ρ均为恒定(对于一定的波导管来说)的,所以传播速度也恒定。
经过计算该旋转波沿着波导钢丝以2 800 m/s的速度向两边传播。
当它传到波导钢丝一端的波检测器时被转换成电信号ua·通过测量磁致旋转波从位置磁铁传到波检测器的时间tL就能确定位置磁铁和波检测器之间的距离。
这样,当部件A和B产生相对运动,通过磁致旋转波位移传感器就可以确定部件A的位置和速度。
电感式位移传感器的设计(9页)
电感式位移传感器的设计(第1页)一、设计背景位移传感器在现代工业生产中扮演着重要角色,广泛应用于机械制造、自动化控制、航空航天等领域。
电感式位移传感器作为一种常见的位移检测装置,具有精度高、稳定性好、抗干扰能力强等优点。
本文将详细介绍电感式位移传感器的设计过程。
二、工作原理电感式位移传感器是基于电磁感应原理设计的。
当传感器中的激励线圈通以交流电流时,会在周围产生交变磁场。
当被测物体(通常是金属目标物)进入该磁场并发生位移时,会导致磁路的磁阻发生变化,进而引起线圈感应电动势的变化。
通过检测感应电动势的变化,即可实现对位移量的精确测量。
三、设计目标1. 确保传感器具有较高的测量精度和分辨率;2. 提高传感器的线性度和稳定性;3. 优化传感器结构,使其便于安装和维护;4. 降低成本,提高传感器的性价比。
四、传感器结构设计1. 激励线圈设计(1)线圈的匝数:匝数越多,产生的磁场强度越大,但线圈电阻也会增加,导致功耗增大。
因此,需在磁场强度和功耗之间寻找平衡。
(2)线圈的材料:选择具有较高磁导率和电阻率的材料,以提高线圈的性能。
(3)线圈的形状:根据实际应用场景,设计合适的线圈形状,使其在有限的空间内产生较强的磁场。
2. 检测线圈设计(1)线圈与激励线圈的相对位置:确保检测线圈能充分感应到激励线圈的磁场变化。
(2)线圈的匝数:匝数越多,感应电动势越大,但线圈电阻也会增加。
需在灵敏度与功耗之间进行权衡。
(3)线圈的材料:选择具有较高磁导率和电阻率的材料。
电感式位移传感器的设计(第2页)五、信号处理电路设计1. 激励信号源(1)频率选择:激励信号的频率应适中,频率太低会导致灵敏度下降,频率太高则可能引起电磁干扰。
(2)幅值稳定:确保激励信号幅值稳定,以减少测量误差。
2. 感应电动势检测感应电动势的检测是位移测量的关键步骤。
检测电路设计如下:(1)放大电路:由于感应电动势信号较弱,需通过放大电路对其进行放大,以便后续处理。
基于磁敏技术的位移传感器的设计
的 线 性 绝 对 位 置 信 号 , 且 成 本 低 廉 , 装 简 便 。 普 通 并 安 而 的水平 ( 者平 面 ) 尔传 感器 只能感 应垂 直于 I 或 霍 C表 面
的磁通 量 。
ML 0 1 X9 3 6芯 片 前 端 是 采 用 T i i 尔 技 术 的 传 感 r xs霍 a
的 重 要 发 展 方 向之 一 , 是 由 于 非 接 触 测 量 方 法 具 有 高 这 速 、 接 触 被 测 物 体 等 优 点 。传 统 的 接 触 式 位 移 传 感 器 不 采 用 电 位 器 式 位 移 传 感 器 , 通 过 电 位 器 元 件 将 机 械 位 它 移 转 换 成 与 之 成 线 性 或 任 意 函 数 关 系 的 电 阻 或 电 压 输 出I。 为 实 现 测 量 位 移 目 的 而 设 计 的 电 位 器 , 求 在 位 ” 要 移 变 化 和 电 阻 变 化 之 间 有 一 个 确 定 关 系 。 非 接 触 式 位
一种磁致伸缩位移传感器的优化设计方法
一种磁致伸缩位移传感器的优化设计方法李丛珊;姜印平【摘要】介绍了磁致伸缩直线位移传感器的测量原理,对传感器中的关键电路进行了优化。
在激励脉冲发生装置的设计中,提出了一种低成本、低功耗且兼顾脉冲质量的实现方案。
在回波信号拾取装置的设计中,确定了其中关键参数。
在计时装置的设计中,提出了一种简单同时满足精度要求的计时方案。
经过优化的传感器具有很好的静态特性,且具有低成本、低功耗、多接口等优点。
%The measurement principle of magnetostriction linear displacement sensor is introduced,on the key circuit of the sensor is optimized. In the design of excitation pulse generator,this paper proposes a low-cost,low-power and pulse quality implementation scheme. In the design of the echo signal pick-up device,analyzes the factors that affect pick up the signal,further identified the key parameters. In the design of timing device,this paper proposes a simple and at the same time meet the accuracy requirement of timing plan. The optimized sensors have good static charac-teristics and the advantages of low cost,low power consumption and multi-interface and so on.【期刊名称】《传感技术学报》【年(卷),期】2014(000)009【总页数】6页(P1202-1207)【关键词】磁致伸缩;位移传感器;激励脉冲;检测线圈【作者】李丛珊;姜印平【作者单位】天津大学电气与自动化工程学院,天津300072;天津大学电气与自动化工程学院,天津300072【正文语种】中文【中图分类】TP212.1磁致伸缩直线位移传感器是利用磁致伸缩材料的磁致伸缩效应及其逆效应实现位移测量的一种非接触式绝对位移传感器。
基于SSI的磁致伸缩位移传感器测量系统的设计

基于SSI的磁致伸缩位移传感器测量系统的设计田立国;李文惠;艾思山;韩巍;罗炜【摘要】设计了一种基于SSI的磁致伸缩位移传感器测量系统,重点介绍了测量系统的硬件设计和SSI接口时序.采用SSI接口作为磁致伸缩位移传感器的输出方式,通过FPGA综合管理和时序设计实现多路SSI信号的测量,并可以通过PCI总线传输接口实现FPGA与上位机的数据通信.测试结果表明,该设计方案稳定、可靠,满足测量系统性能指标要求.【期刊名称】《工程与试验》【年(卷),期】2012(052)004【总页数】3页(P55-57)【关键词】SSI;磁致伸缩位移传感器;FPGA;测量系统【作者】田立国;李文惠;艾思山;韩巍;罗炜【作者单位】长春机械科学研究院有限公司,吉林长春130012;吉林汽车制动器厂,吉林长春130012;中联重科股份有限公司渭南分公司,陕西渭南714000;长春机械科学研究院有限公司,吉林长春130012;长春机械科学研究院有限公司,吉林长春130012【正文语种】中文【中图分类】TP2121 概述磁致伸缩位移传感器(Magnetostrictive Position Sensor)是利用两个不同磁场相交时产生的应变脉冲信号被检测到的时间来计算出磁场相交点的准确位置,具有高精度、高响应、低迟滞、高可靠性、非接触、寿命长、稳定性高、安装方便等优点,无须重新标定,无须定期维护,因而被广泛应用于机器人、自动化技术、探测与开发技术、试验机与试验技术等精确测量领域。
本文介绍一种基于SSI接口的磁致伸缩位移传感器,并结合EDA技术设计了一种位移测量系统,能够实现多路SSI信号输出,并可以通过PCI总线传输接口实现与上位机的通信。
磁致伸缩传感器采用非接触测量运动物体的直线位移,具有电压输出、电流输出、SSI和现场总线等多种输出方式。
为了满足高精度测量和可靠性传输,本文采用具有很高抗干扰性的SSI同步串行接口(Synchronous Serial Interface)输出方式,可以远距离传送数据以同步方式进行交换。
《磁致伸缩直线位移传感器弹性波机理研究》范文
《磁致伸缩直线位移传感器弹性波机理研究》篇一一、引言磁致伸缩直线位移传感器是一种高精度的测量装置,其工作原理基于磁致伸缩效应和弹性波的传播。
随着工业自动化和精密测量的需求日益增长,对磁致伸缩直线位移传感器的研究也日益深入。
本文旨在研究磁致伸缩直线位移传感器的弹性波机理,为提高其测量精度和稳定性提供理论支持。
二、磁致伸缩效应及传感器结构磁致伸缩效应是指材料在磁场作用下发生尺寸变化的现象。
磁致伸缩直线位移传感器主要由磁致伸缩材料、传感器探头、检测电路等部分组成。
其中,磁致伸缩材料是传感器的核心部件,其性能直接影响传感器的测量精度和稳定性。
三、弹性波传播机理弹性波是指在介质中传播的机械波。
在磁致伸缩直线位移传感器中,当磁场作用于磁致伸缩材料时,材料内部会产生应力,进而激发弹性波的传播。
这些弹性波在传播过程中,会携带关于磁场和材料应变的信息。
磁致伸缩材料的弹性波传播机理主要包括以下几个方面:1. 磁场作用下的材料应变:当磁场作用于磁致伸缩材料时,材料内部原子磁矩重新排列,导致材料发生形变,产生应力。
2. 弹性波的产生与传播:应力作用下,材料内部产生弹性波,这些波以一定的速度在材料中传播。
传播过程中,波的幅度、频率等特性会发生变化,携带关于磁场和应变的信息。
3. 检测电路的信号处理:传感器探头将接收到的弹性波转换为电信号,通过检测电路进行处理,最终得到位移测量结果。
四、研究方法与实验结果本研究采用理论分析、数值模拟和实验研究相结合的方法,对磁致伸缩直线位移传感器的弹性波机理进行深入探讨。
1. 理论分析:通过建立磁致伸缩材料的本构关系和弹性波传播的数学模型,分析磁场、应力、弹性波传播速度等参数之间的关系。
2. 数值模拟:利用有限元分析软件,对磁致伸缩材料的磁场分布、应力分布和弹性波传播过程进行数值模拟,验证理论分析的正确性。
3. 实验研究:通过制备不同成分的磁致伸缩材料,制作成传感器探头,进行实际测量实验,验证传感器的性能和测量精度。
磁致位移传感器检测线圈和驱动脉冲优化设计
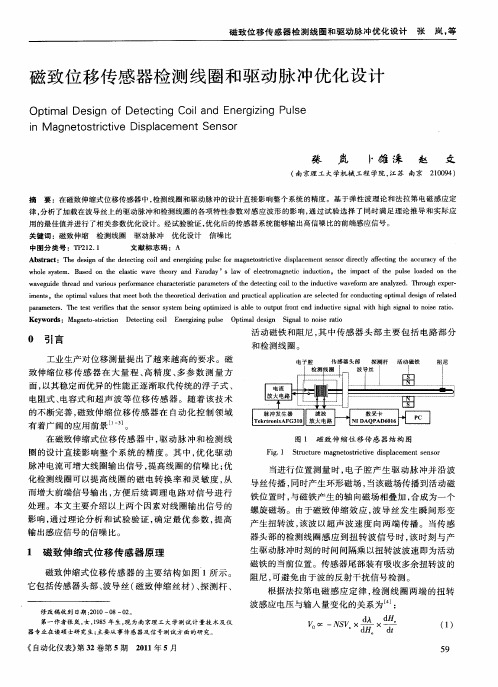
1 磁 致伸 缩式 位移传 感器 原理
磁致伸缩式位移传 感器 的主 要结构 如 图 1所示 。
它包括传感器头部 、 波导丝 ( 致伸 缩丝材 ) 探测杆 、 磁 、
修 改稿收 到 日期 :0 0— 8 2 2 1 0 —0 。
其传递 函数为 :
() = 1
—
s +2
s+
( 2)
式 中 : c分别 为线圈 的 电阻 、 、 、 电感 和分 布 电容值 ;
√ 为 圈 固 频 ; D詈 为 尼 。 r 线 的 有 率 ,阻 比 壶,
为提 高线 圈的动态 响应 特性 , 要求 在 0 6~ . . 08
由电磁感应 理论 可知 , 圈 的匝数 与扭转 波感应 线 电压的输出成 正 比, 增加感应线 圈匝数可提高灵敏度 。 但匝数的增加也会 带来不 利 的影 响 : ①输 出噪 声 同步
感应波形是 由驱动脉 冲引起 的环 向磁场使波导丝发生
磁化而产生 的, 扭转 波感应波形 是 由波导丝 的磁致 伸
取决 于感应线 圈的结构 和脉 冲电流 的特性参数 。
在磁致伸缩传感器 的实 验平 台 中, 动脉 冲由脉 驱 冲发生器产生 , 电流放 大后加 载到波 导丝上 。检 测 经 线 圈的输 出信号经调 理 电路 放大后 , 通过数 据采集 卡 直接导人 P C中进行处理。
应出最大的电势差 , 而考虑 到线 圈结构尺 寸的 限制和 绕制线圈的方便性 , 选定线 圈的长度为 2c m。
张
岚。 等 综合考虑后选择线径为 0 0 m的漆包线绕制线圈 。 .8m 当扭转波传播到线 圈处时 , 该处波 导丝 中的磁畴 发生偏转 , 引起轴向磁通量 的变化 , 由线 圈感应到 的线 圈感应扭转波 的起止时间间隔即为扭转波穿过线 圈所 需的时间 , 将此段时间间隔乘以波速即得 到绕组长度 。 当绕组长度为扭转波半 波长 的整数倍 时 , 线圈恰 能感
磁致伸缩位移传感器工作原理
磁致伸缩位移传感器工作原理磁致伸缩位移传感器是一种常用的位移测量装置,其工作原理基于磁致伸缩效应。
磁致伸缩效应是指在磁场中,某些材料会发生长度变化的现象。
磁致伸缩位移传感器利用这一效应,通过测量材料长度的变化来获得被测量物体的位移信息。
磁致伸缩位移传感器通常由磁致伸缩材料、磁场发生器和传感器三部分组成。
磁致伸缩材料是磁致伸缩位移传感器的核心部件,其具有特殊的物理性质,能够对外加磁场作出响应。
当磁场发生器产生磁场时,磁致伸缩材料内部的磁性颗粒会在磁场的作用下发生定向排列,从而引起材料的长度变化。
传感器部分是用于测量磁致伸缩材料长度变化的装置。
常见的传感器有磁敏电阻、霍尔元件等。
磁敏电阻是一种电阻随长度变化的元件,它的电阻值与磁致伸缩材料的长度成正比。
当磁致伸缩材料发生长度变化时,磁敏电阻的电阻值也会相应变化,通过测量电阻值的变化可以得到被测量物体的位移信息。
霍尔元件则是一种根据磁场强度变化产生电压信号的元件,通过测量霍尔元件的电压信号变化可以得到位移信息。
磁致伸缩位移传感器的工作原理可以通过以下步骤来描述:首先,磁场发生器产生一个磁场,作用于磁致伸缩材料上。
磁致伸缩材料内部的磁性颗粒在磁场的作用下发生定向排列,导致材料长度发生变化。
然后,传感器测量磁致伸缩材料长度的变化。
对于磁敏电阻传感器,测量其电阻值的变化;对于霍尔元件传感器,测量其电压信号的变化。
最后,通过将测量到的电阻值或电压信号转换为与位移相关的物理量,即可得到被测量物体的位移信息。
磁致伸缩位移传感器具有许多优点,如精度高、响应速度快、可靠性好等。
它广泛应用于机械制造、航空航天、自动化控制等领域,用于测量各种物体的位移、振动、形变等参数。
例如,在机械制造中,磁致伸缩位移传感器可以用于测量机械零件的位移,以实现对机械装置的控制和监测。
在航空航天领域,磁致伸缩位移传感器可以用于测量飞机翼展的变化,以实现对飞机的飞行状态进行监测和控制。
磁致伸缩位移传感器是一种基于磁致伸缩效应工作的位移测量装置。
电磁感应式位移传感器的设计及参数优化

电磁感应式位移传感器的设计及参数优化在科技的海洋中,电磁感应式位移传感器犹如一艘精密的探测船,它通过电磁感应原理,将物体的位移量转化为电信号,为工业自动化和精密测量领域提供了强有力的支持。
然而,如何设计出性能更优、精度更高的电磁感应式位移传感器,以及如何对其参数进行优化,一直是工程师们努力探索的方向。
首先,我们要明确电磁感应式位移传感器的工作原理。
当传感器线圈中的电流发生变化时,会产生磁场的变化,进而在附近的导体中产生涡流。
这个涡流又会反作用于磁场,使得线圈中的电流发生变化。
通过检测这个电流的变化,就可以得到物体位移的信息。
这个过程就像是一位敏锐的猎人,通过观察猎物留下的细微痕迹,来判断其行踪。
在设计电磁感应式位移传感器时,我们需要关注几个关键参数。
首先是线圈的匝数和线径。
匝数越多,产生的磁场越强;线径越大,电阻越小,电流变化越明显。
但同时,匝数和线径的增加也会带来传感器体积的增大和成本的提高。
因此,我们需要在这两者之间找到一个平衡点。
这就像是在调配一杯鸡尾酒,既要保证口感醇厚,又要控制酒精含量适中。
其次是线圈的排列方式。
不同的排列方式会影响磁场的分布和强度,进而影响传感器的性能。
例如,同心圆排列可以产生均匀的磁场,适用于需要高精度测量的场合;而平行排列则可以产生较强的磁场,适用于需要大范围测量的场合。
这就像是在布置一场舞台剧,根据剧情的需要来选择合适的布景和灯光。
最后是电路的设计。
一个优秀的电路设计可以提高传感器的灵敏度和稳定性,降低噪声和干扰。
我们可以采用差分放大电路来抑制共模干扰,或者使用滤波器来去除高频噪声。
这就像是给一位歌手配上合适的伴奏和音响设备,让她的声音更加动听和清晰。
在参数优化方面,我们可以通过实验和仿真来找到最佳的参数组合。
例如,我们可以改变线圈的匝数和线径,观察其对传感器性能的影响;或者调整电路中的元件值,看是否能提高传感器的灵敏度和稳定性。
这就像是在做一道复杂的数学题,通过不断尝试和验证来找到正确的答案。
基于磁敏角度技术的拉线式位移传感器的设计与应用
基于磁敏角度技术的拉线式位移传感器的设计与应用作者:苏玉,卢印举来源:《现代电子技术》2010年第15期摘要:介绍MLX90316的结构和特性,设计以LPC2136为CPU,MLX90316为位置反馈的拉线式位移传感器,给出了基于MLX90316的位移检测策略,并详细分析了接口电路原理图和编程原理。
该传感器具备一路RS 485通信链路和一路基于PWM可调电流输出。
试验证明,该传感器克服传统拉线式位移传感器的易磨损、分辨力差、阻值偏低、高频特性差等缺点,提高了测量精度。
关键词:MLX90316; 磁敏角度技术; 位移传感器; LPC2136中图分类号:TN919; TP29文献标识码:A文章编号:1004-373X(2010)15-0136-03Design and Application of Guyed Displacement SensorBased on Magnetosensitive Angular TechnologySU Yu,LU Yin-ju(School of Information Engineering, Zhongzhou University, Zhengzhou 450044, China)Abstract: The structure and characteristics of MLX90316 are introduced. A guyed displacement sensor which takes LPC2136 as CPU and MLX90316 as position feedback component is designed. The displacement detection method based on MLX90316 is presented. The schematic diagram of interface circuit and programmming principle are analyzed in detail. This sensor has a RS485 communication link and adjustable current output based on PWM. The experiment demonstrates that the shortcomings of traditional guyed displacement sensor such as rapidly wearing, weak resolution, lower resistance and bad high-frequency characteristics are overcome, and the measurement accuracy is improved.Keywords: MLX90316; magnetosensitive angular technology; displacement sensor; LPC2136 0 引言传统的拉线式位移传感器采用电位器式位移传感器,它通过电位器元件将机械位移转换成与之成线性或任意函数关系的电阻或电压输出[1]。
基于磁敏传感技术的位移测量

基于磁敏传感技术的位移测量
位移测量的常见方法有图像分析法、双频激光测量法、光栅或磁栅测量法、磁阻或磁场测量法等。
本文提出了一种带有标志位的绝对式编码方法,使得识别出的序列含有用于粗读数的数值码和用于精读数的标识码,不仅避免了相对式测量的失忆问题,而且突破了绝对式测量的表征范围瓶颈,增强了容错能力。
1 编码规则
编码采用格雷码(Gray)为数值码,以某一固定码宽为参考码R,它用于标尺定位和提高精度。
Gray码是一种绝对编码方式的无权码,它所具有的循环、单步特性能消除随机取数时出现重大误差的可能,其任意两个柏邻整数之间转换时,只有一个位数发生变化,大大减少了由一个状态转到下一个状态时的逻辑混淆,具有较强的容错能力。
以6位编码为例,其部分十进制数与Gray码的一一对应关系如表1所示。
基于磁敏角度技术的拉线式位移传感器的设计与应用
基于磁敏角度技术的拉线式位移传感器的设计与应用
0 引言传统的拉线式位移传感器采用电位器式位移传感器,它通过电位器元件将机械位移转换成与之成线性或任意函数关系的电阻或电压输出。
普通直线电位器和圆形电位器都可分别用作直线位移和角位移传感器。
但是,为实现测量位移目的而设计的电位器,要求在位移变化和电阻变化之间有一个确定关系。
电位器式位移传感器的可动电刷与被测物体相连,物体的位移引起电位器移动端的电阻变化。
阻值的变化量反映了位移的量值,阻值的增加还是减小则表明了位移的方向。
通常在电位器上通以电源电压,把电阻变化转换为电压输出。
传统的拉线式位移传感器由于其电刷移动时电阻以匝电阻为阶梯变化,其输出特性亦呈阶梯形。
如果这种位移传感器在伺服系统中用作位移反馈元件的时,则过大的阶跃电压会引起系统振荡。
因此在电位器的制作中应尽量减小每匝的电阻值。
同时,电位器式传感器的另一个主要缺点是易磨损、分辨力差、阻值偏低、高频特性差,从而导致测量精度的下降。
它的优点是:结构简单,输出信号大,使用方便,价格低廉。
基于磁敏角度技术的拉线式位移传感器以磁场为传输载体,将位移变换转换为磁场角度位移,同时,通过通信接口将位移信号返回给应用系统。
1 总体设计方案基于磁敏角度技术的拉线式位移传感器的功能是将拉线的机械位移换成可以计量、记录或传送的电信号,主要由自动回复弹簧、轮毂、磁铁以及数据处理单元等部分构成,结构如图1 所示。
由图1 可以看出,该基于磁敏角度技术的拉线式位移传感器主要由6 部分
组成,改变传统的拉线式位移传感器接触式、易磨损、高频特性差等缺点,基于磁敏角度技术的拉线式位移传感器以磁场为媒介,将机械位移变化转化为磁。
基于磁敏技术的位移传感器的设计

基于磁敏技术的位移传感器的设计
卢印举;单国全
【期刊名称】《微型机与应用》
【年(卷),期】2010(029)014
【摘要】介绍了MLX90316的内部结构和应用特性,设计了以LPC2136为CPU、MLX90316为位置反馈、具备1路光电隔离RS485通信输出的位移传感器,给出
了位移计算策略和计算方法,详细分析了接口电路原理图和接口时序.
【总页数】3页(P20-22)
【作者】卢印举;单国全
【作者单位】中州大学,信息工程学院,河南,郑州,450044;中州大学,信息工程学院,
河南,郑州,450044
【正文语种】中文
【中图分类】TN913
【相关文献】
1.基于磁敏测量技术的拉线式位移传感器 [J], 毛潭;赵康康;邓士龙;苏颜欣;张从鹏
2.基于磁敏电阻的齿轮转速传感器设计 [J], 朱志平
3.基于磁栅位移传感器的角度测量系统设计 [J], 金南;程远增;孙书鹰
4.基于磁敏角度技术的拉线式位移传感器的设计与应用 [J], 苏玉;卢印举
5.基于磁敏传感器和专用集成电路的位移测量系统设计 [J], 沈传兵
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
磁敏角度感应器选用MLX90316,它将位移所导致的磁铁磁场转动的角度转换为磁敏角度。 微处理器单元通过SPI接口与MXL90316进行数据通信,用于完成磁敏角度数据的接收,由于接收到的是磁场转换的角度,所以通过建立数学模型,结合轮毂直径等因素,将磁敏角度换算为拉线的位移。传感器的所有任务最终都挂在实时操作系统μC/OS-II上运行,因此不仅要考虑微控制器的内部资源,还要看其可移植性和可扩展性。LPC2136是Phlips公司生产的32 bit ARM7TDMI-S微处理器[7],嵌入256 KB高速Flash存储器。采用3级流水线技术,取指、译码和执行同时进行,能够并行处理指令,提高CPU运行速度。由于具有非常小的尺寸和极低的功耗,抗干扰能力强,适用于各种工业控制。 数据通信单元设计了1路RS485通信接口,负责接收来自应用系统的命令、向应用系统返回采集的位移结果。2.1 SPI接口电路设计 MLX90316具备1路SPI接口,用于角度信号的数据,由于串行通信的输出信号直接来自于内部DSP输出,SPI输出模式更稳定,误差更小,并且具有更高的抗干扰能力,在本设计中,选用SPI接口,具体的硬件接口连接电路。在图2中,MLX90316的SPI 3根线与LPC2136的SPI0口连接。SPI(Serial Protocol Interface)总线接口是一种同步串行外设接口。这是一个4根信号线的串行接口协议,包括主、从两种模式。这4根信号线分别是:时钟线(SCK)、数据输入线(MISO)、数据输出线(MOSI)和从设备使能线(/SS)。
SPI接口中,LPC2136作为主控端,MLX90316作为从属端。SPI通信模块主要让LPC2136读取MLX90316的磁敏角度,SPI的通信过程为:主控端先输出一个0xAA以及一个0xFF作为通信起始信号,接着输出8个0xFF,而从端会同时输出2个0xFF、4 B的角度信号以及4个0xFF,从而完成一次数据通信。具体的通信时序。
基于磁敏技术的位移传感器的设计
摘 要: 介绍了MLX90316的内部结构备1路光电隔离RS485通信输出的位移传感器,给出了位移计算策略和计算方法,详细分析了接口电路原理图和接口时序。关键词: MLX90316; 磁敏技术; 位移传感器
对物体位移进行非接触测量是目前位移测量技术的重要发展方向之一,这是由于非接触测量方法具有高速、不接触被测物体等优点。传统的接触式位移传感器采用电位器式位移传感器,它通过电位器元件将机械位移转换成与之成线性或任意函数关系的电阻或电压输出[1]。为实现测量位移目的而设计的电位器,要求在位移变化和电阻变化之间有一个确定关系。非接触式位移传感器种类繁多,如时栅位移传感器[2]、线位移差分传感器[3]、容栅位移传感器[4]、电感式位移传感器[5]等,这些传感器的精度高,但结构复杂、成本高,对被测物体运动速度还附加了限制,如必须运行平稳、无突变和相对低速等。 本文从工程应用的角度,设计了一种基于磁敏技术的位移传感器,该传感器在精度、抗震、耐用度等方面有了成功的改善。1 磁敏传感器工作原理 在基于磁敏技术的位移传感器上,选择MLX90316作为磁敏角度的采集。 MLX90316是一种线性霍尔芯片,在霍尔效应传感器上增加集成磁场集中器(IMC)的单片集成传感芯片[6]。能够在单点感应到磁通量的所有3个分量,因此,可以得到360°的旋转位置值,通过多种模式输出准确度很高的线性绝对位置信号,并且成本低廉,安装简便。而普通的水平(或者平面)霍尔传感器只能感应垂直于IC表面的磁通量。 MLX90316芯片前端是采用Triaxis霍尔技术的传感器。由霍尔传感器得到的二路正交的模拟信号经过放大处理后,经过14 bit微分型A/D转换器进入芯片微处理器(DSP),再经过16 bit DSP处理之后的数字信号分3路输出。MLX90316输出具有12 bit角度分辨率,10 bit角度精度,并且在一定程度上可以避免外围温度变化对输出精度的影响。MLX90316具有3种输出:由12 bit D/A转换为模拟量输出;频率为100 Hz~1 000 Hz的PWM输出;数字模式下利用串行通信协议输出(SPI)。 在本设计中,选择SPI接口输出。2 硬件接口电路设计 基于磁敏技术的位移传感器主要由3个部分组成,前端角度信号采集、数据处理单元、数据通讯单元,具体的功能框图。
2.2 RS485通信接口电路设计 RS485总线以其结构简单、通信速率高、传输距离远等诸多优点,在工业控制系统中得到了广泛应用。它采用平衡发送和差分接收方式实现通信,发送端将串行口的TTL电平信号转换成差分信号A、B两路输出,经过线缆传输之后在接收端将差分信号还原成TTL电平信号[8]。由于传输线通常使用双绞线,又是差分传输,所以有极强的抗共模干扰的能力,总线收发器灵敏度很高。 在基于磁敏技术的位移传感器中设计了一路RS485信号输出,RS485接口芯片采用MAX3485,用于与应用系统进行位移数据交换。,为了确保数据通信的可靠性,通信接口采用了光电隔离芯片6N137。
3 位移计算算法实现 MLX90316采集旋转的角度数据,ARM根据获取的角度数据,通过建立数学模型计算为直线位移数据。ARM通过RS485通信接口与应用系统的设备进行通信,将接收来自应用系统设备的命令,并将采集到的位移信号反馈给应用系统。 位移计算公式为: 其中,R为引起MLX90316角度变换的线性位移距离角度变换的中心半径,φ为直线位移所导致的MLX90316的旋转的角度,L为直线位移。4 工程应用与结论 (1)磁铁选择 水平磁通量均匀的磁铁都可以使用,磁铁的大小和材料并不重要。在机械、磁场和热容限之内,水平磁通量必须在20-70 mT(例如,45 mT±25 mT)范围以内。 (2)气隙距离 在气隙问题上,如果距离IC表面的实际气隙大于7.5 mm,环形磁铁要优于盘形磁铁。磁铁可以放在轴的末端,使用环形磁铁时可以绕在轴上。也可以使用特殊的磁铁设计,获得旋转位置传感器正常的传输特性。 在“基于FPGA技术的堤坝位移智能检测系统”中,本传感器用于堤坝根石位移采集。利用RSS485总线将35个监测点组成星型网络,从试验结果可以看出,该传感器克服传统拉线式位移传感器的易磨损、分辨力差、阻值偏低、高频特性差等缺点,提高了测量精度。