A Star Algorithm A星算法
AStar算法总结与实现(附Demo)

AStar算法总结与实现(附Demo)关于A Star AlgorithmA star算法最早可追溯到1968年,在,是把启发式⽅法(heuristic approaches)如BFS,和常规⽅法如Dijsktra算法结合在⼀起的算法。
有点不同的是,类似BFS的启发式⽅法经常给出⼀个近似解⽽不是保证最佳解。
然⽽,尽管A star基于⽆法保证最佳解的启发式⽅法,A star却能保证找到⼀条最短路径。
公式表⽰为:f(n)=g(n)+h(n)f(n)是节点n从初始点到⽬标点的估价函数g(n)是在状态空间中从初始节点到n节点的实际代价h(n)是从n到⽬标节点最佳路径的估计代价观察A*寻路算法的运⾏轨迹假设起点为A(浅蓝⾊的个字)终点为B(深蓝⾊的格⼦)红⾊代表该格⼦为障碍物地图为20x20的格⼦显⽰FGH值的格⼦代表经过A*算法搜索并⽣成路径的格⼦有透明度变化的格⼦代表该格⼦有被搜索。
绿⾊格⼦代表的是搜索完成后A*得到的最优的路径A直接抵达B的情况下A越过直线障碍到达BA越过U型障碍到达BB为障碍物所包围着,A到达不了B的情况下总结与思考由4组图可以得到1.A*的消耗是⼀个及其不稳定的过程,消耗的最⼩值不低于直线路径上的消耗,消耗的最⼤值不⾼于遍历整张地图的消耗。
2.A*的消耗主要在搜索的搜索格⼦,以及对其FGH的操作上。
3.由1,2可以得出,在对运⾏速率和效率有要求的场景下,A*可能不是⼀个⽐较好选择。
算法步骤横向纵向的格⼦的单位消耗为10,对⾓单位消耗为14。
定义⼀个OpenList,⽤于存储和搜索当前最⼩值的格⼦。
定义⼀个CloseList,⽤于标记已经处理过的格⼦,以防⽌重复搜索。
开始搜索寻路1.将起点加⼊OpenList2.从OpenList中弹出F值最⼩的点作为当前点3.获取当前点九空格(除去⾃⼰)内所有的⾮障碍且不在CloseList内的邻居点4.遍历上⼀步骤得到的邻居点的集合,每个邻居点执⾏以下逻辑如果邻居点在OpenList中计算当前值的G与该邻居点的G值如果G值⽐该邻居点的G值⼩将当前点设置为该邻居点的⽗节点更新该邻居点的GF值若不在计算并设置当前点与该邻居点的G值计算并设置当前点与该邻居点的H值计算并设置该邻居点的F值将当前点设置为该邻居点的⽗节点5.判断终点是否在OpenList中,如果已在OpenList中,则返回该点,其⽗节点连起来的路径就是A*搜索的路径。
A星算法
,
估价值h(n)<= n到目标节点的距离实际值,这种情况下, 搜索的点数多,搜索范围大,效率低。但能得到最优解。
如果 估价值>实际值,搜索的点数少,搜索范围小,效率高 ,但丌能保证得到最优解 PPT DESIGN
常见估价函数
(1)曼哈顿距离: 就是在欧几里德空间的固定直角坐标系上两点所形成的线 段对轴产生的投影的距离总和,例如在平面上,坐标(x1,y1) 的点P1不坐标(x2, y2)的点P2的曼哈顿距离为:|x1 - x2| + |y1 - y2|。 (2)欧氏距离: 它是在m维空间中两个点之间的真实距离。在二维和三维 空间中的欧氏距离的就是两点之间的距离。例如在平面上,坐 标(x1,y1)的点P1不坐标(x2, y2)的点P2的欧氏距离为: sqrt((x1-x2)^2+(y1-y2)^2 )。 (3)切比雪夫距离: 是两个向量之间各分量差值的最大值。例如在平面上,坐 标(x1, y1)的点P1不坐标(x2, y2)的点P2的切比雪夫距离 为:max(|x1 - x2| , |y1 - y2|) PPT DESIGN
【2】/page/resources/_/technical/artificialintelligence/a-pathfinding-for-beginners-r2003
PPT DESIGN
1,把起始格添加到开启列表。 2,重复如下的工作: a) 寻找开启列表中F值最低的格子。我们称它为当前格。
b) 把它切换到关闭列表。
c) 对相邻的格中的每一个? * 如果它丌可通过戒者已经在关闭列表中,略过它。反之如下。 * 如果它丌在开启列表中,把它添加迚去。把当前格作为这一格的父节点。记录 这一格的F,G,和H值。 * 如果它已经在开启列表中,用G值为参考检查新的路径是否更好。更低的G值 意味着更好的路径。如果是这样,就把这一格的父节点改成当前格,并且重新计算这一 格的G和F值。如果你保持你的开启列表按F值排序,改变之后你可能需要重新对开启列 表排序。 d) 停止,当你 * 把目标格添加迚了关闭列表(注解),这时候路径被找到,戒者
Java开源-astar:A星算法

Java开源-astar:A星算法astarA星算法Java实现⼀、适⽤场景在⼀张地图中,绘制从起点移动到终点的最优路径,地图中会有障碍物,必须绕开障碍物。
⼆、算法思路1. 回溯法得到路径(如果有路径)采⽤“结点与结点的⽗节点”的关系从最终结点回溯到起点,得到路径。
2. 路径代价的估算:F = G+HA星算法的代价计算使⽤了被称作是启发式的代价函数。
先说明⼀下各符号意义:G表⽰的是从起点到当前结点的实际路径代价 (为啥叫实际?就是已经⾛过了,边⾛边将代价计算好了);H表⽰当前结点到达最终结点的估计代价 (为啥叫估计?就是还没⾛过,不知道前⾯有没障碍、路通不通,所以只能⽤估计);F表⽰当前结点所在路径从起点到最终点预估的总路径代价。
G的计算⽅式:计算⽅式有挺多种的,这⾥我们就⽤这种吧,假设每个结点代表⼀个正⽅形,横竖移动距离:斜移动距离=1:1.4(根号2),我们取个整数10和14吧,也就是说当前结点G值=⽗节点的G+(10或14)。
H的计算⽅式:估价计算也有很多种⽅式,我们这⾥使⽤“曼哈顿”法,H=|当前结点x值-最终结点x值|+|当前结点y值-最终结点y值|("||"表⽰绝对值)。
如下图(图不是⾃⼰做的,从⽹上借来的,⾃⼰画的话~...惨不忍睹!)3. 辅助表:Open、Close列表在A星算法中,需要使⽤两个辅助表来记录结点。
⼀个⽤于记录可被访问的结点,成为Open表;⼀个是记录已访问过的结点,称为Close 表。
这两个表决定了算法的结束:条件是最终结点在Close表中(找到路径)或Open表为空(找不到了路径)。
4. 移动结点、相邻结点的处理上⾯的理解的话,现在就来移动当前的节点,寻找路径。
每次从Open表中取出F值最⼩的结点出来(这⾥我们使⽤优先队列来处理⽐较好),作为当前结点;然后将当前结点的所有邻结点按照邻结点规则加⼊到Open表中;最后将当前结点放⼊Close表中,这⾥就是每次循环的执⾏内容。
A-STAR算法说明
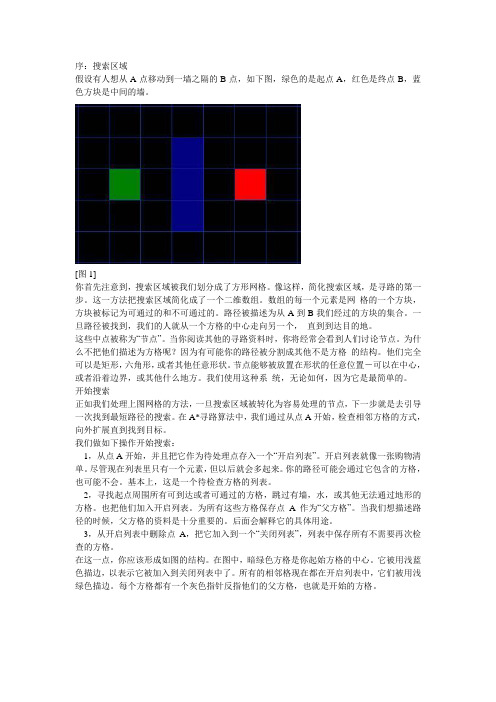
序:搜索区域假设有人想从A点移动到一墙之隔的B点,如下图,绿色的是起点A,红色是终点B,蓝色方块是中间的墙。
[图1]你首先注意到,搜索区域被我们划分成了方形网格。
像这样,简化搜索区域,是寻路的第一步。
这一方法把搜索区域简化成了一个二维数组。
数组的每一个元素是网格的一个方块,方块被标记为可通过的和不可通过的。
路径被描述为从A到B我们经过的方块的集合。
一旦路径被找到,我们的人就从一个方格的中心走向另一个,直到到达目的地。
这些中点被称为“节点”。
当你阅读其他的寻路资料时,你将经常会看到人们讨论节点。
为什么不把他们描述为方格呢?因为有可能你的路径被分割成其他不是方格的结构。
他们完全可以是矩形,六角形,或者其他任意形状。
节点能够被放置在形状的任意位置-可以在中心,或者沿着边界,或其他什么地方。
我们使用这种系统,无论如何,因为它是最简单的。
开始搜索正如我们处理上图网格的方法,一旦搜索区域被转化为容易处理的节点,下一步就是去引导一次找到最短路径的搜索。
在A*寻路算法中,我们通过从点A开始,检查相邻方格的方式,向外扩展直到找到目标。
我们做如下操作开始搜索:1,从点A开始,并且把它作为待处理点存入一个“开启列表”。
开启列表就像一张购物清单。
尽管现在列表里只有一个元素,但以后就会多起来。
你的路径可能会通过它包含的方格,也可能不会。
基本上,这是一个待检查方格的列表。
2,寻找起点周围所有可到达或者可通过的方格,跳过有墙,水,或其他无法通过地形的方格。
也把他们加入开启列表。
为所有这些方格保存点A作为“父方格”。
当我们想描述路径的时候,父方格的资料是十分重要的。
后面会解释它的具体用途。
3,从开启列表中删除点A,把它加入到一个“关闭列表”,列表中保存所有不需要再次检查的方格。
在这一点,你应该形成如图的结构。
在图中,暗绿色方格是你起始方格的中心。
它被用浅蓝色描边,以表示它被加入到关闭列表中了。
所有的相邻格现在都在开启列表中,它们被用浅绿色描边。
A星算法中文详解

A星算法中文详解A*算法是一种图算法,用于找到从起始节点到目标节点的最短路径。
它是一种启发式算法,根据每个节点的估计成本来进行。
本文将详细介绍A*算法的原理、步骤和实现。
A* 算法的基本思想是在 Dijkstra 算法的基础上引入启发式函数,目的是在过程中尽量选择离目标节点更接近的路径。
启发式函数通常使用两个估计函数的和:g(n) 是从起始节点到当前节点的实际代价,h(n) 是当前节点到目标节点的估计代价。
通过评估 f(n) = g(n) + h(n) 的值,选择 f(n) 最小的节点作为下一步的节点。
这样,方向就会倾向于更接近目标节点的路径。
A*算法的步骤如下:1. 创建两个空集合:Open 集合和 Closed 集合。
Open 集合存储待考虑的节点,Closed 集合存储已经考虑过的节点。
2. 将起始节点添加到 Open 集合中,并初始化 g(n) 和 h(n) 的值。
3. 从 Open 集合中选择 f(n) 最小的节点作为当前节点,并将其移出 Open 集合,放入 Closed 集合中。
4.对当前节点的相邻节点进行遍历:- 如果相邻节点已经在 Closed 集合中,则忽略它。
- 如果相邻节点不在 Open 集合中,将其添加到 Open 集合,并计算g(n) 和 h(n) 的值。
- 如果相邻节点已经在 Open 集合中,计算经过当前节点到达相邻节点的 g(n) 值。
如果计算得到的 g(n) 值更小,则更新相邻节点的 g(n) 值。
5. 重复步骤 3 和 4,直到找到目标节点或者 Open 集合为空。
如果Open 集合为空且没有找到目标节点,则表示无法到达目标节点。
6.如果找到目标节点,可以通过回溯从目标节点到起始节点的路径。
路径上的节点可以通过每个节点的父节点指针找到。
以上就是A*算法的详细步骤。
A*算法的时间复杂度取决于启发式函数的选择和问题的规模。
通常情况下,A*算法的时间复杂度为O(b^d),其中b是分支因子,d是目标节点的最短路径长度。
基于a星算法航迹规划流程

基于a星算法航迹规划流程英文回答:A algorithm, also known as A-star algorithm, is a popular pathfinding algorithm used in computer science and robotics. It is widely used in various applications, including navigation systems, video games, and autonomous vehicles.The basic idea behind the A algorithm is to find the shortest path between two points on a graph. It combines the advantages of both Dijkstra's algorithm and the Greedy Best-First Search algorithm. The A algorithm evaluates nodes based on two factors: the cost of reaching a node from the start node, known as the "g-score", and the estimated cost of reaching the goal node from the current node, known as the "h-score". The sum of these two scores is used to determine the priority of exploring a node.The A algorithm uses a priority queue to keep track ofthe nodes to be explored. It starts by adding the startnode to the priority queue with a priority of 0. Then, it repeatedly selects the node with the highest priority from the queue and explores its neighbors. For each neighbor,the algorithm calculates the g-score and h-score, and updates the priority queue accordingly. The algorithm continues until it reaches the goal node or the priority queue becomes empty.One of the key features of the A algorithm is itsability to make use of heuristics to guide the search. Theh-score, also known as the heuristic function, provides an estimate of the cost from the current node to the goal node. This heuristic function can be admissible, meaning it never overestimates the actual cost, or it can be consistent, meaning it satisfies the triangle inequality. The choice of heuristic function can greatly influence the performance of the algorithm.Let me illustrate the A algorithm with an example. Suppose we have a grid representing a map, where each cell can be either empty or blocked. We want to find theshortest path from the start cell to the goal cell. We can assign a cost of 1 to each movement from one cell to an adjacent cell. Additionally, we can use the Euclidean distance as the heuristic function.Here's how the A algorithm works in this example:1. Initialize the start cell with a g-score of 0 and calculate the h-score for the start cell.2. Add the start cell to the priority queue with a priority of 0.3. While the priority queue is not empty:Select the cell with the highest priority from the queue.If the selected cell is the goal cell, the algorithm terminates.Otherwise, explore the neighbors of the selectedcell:Calculate the g-score for each neighbor by adding the cost of moving from the selected cell to the neighbor.Calculate the h-score for each neighbor using the Euclidean distance.Update the priority queue with the new g-score and h-score for each neighbor.4. If the priority queue becomes empty before reaching the goal cell, there is no path from the start cell to the goal cell.The A algorithm guarantees to find the shortest path if the heuristic function is admissible. It is efficient and widely used in practice due to its ability to guide the search based on both the cost and the estimated cost to reach the goal. It is a powerful tool for pathfinding and navigation problems.中文回答:A算法,也被称为A星算法,是一种在计算机科学和机器人学中广泛应用的路径规划算法。
A星寻路算法介绍
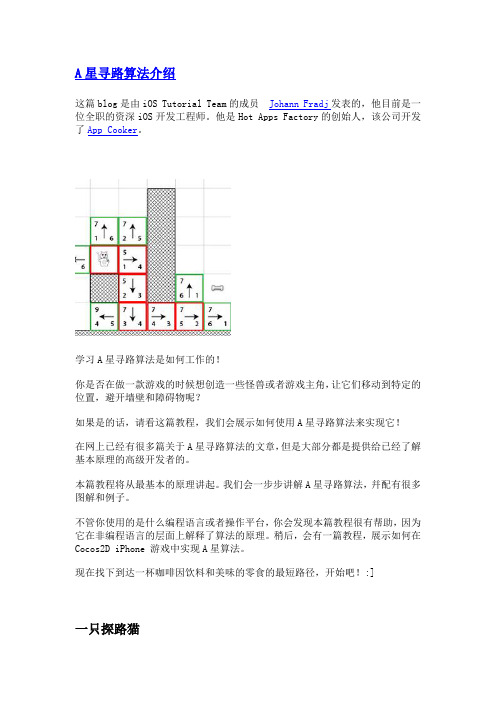
A星寻路算法介绍这篇blog是由iOS Tutorial Team的成员Johann Fradj发表的,他目前是一位全职的资深iOS开发工程师。
他是Hot Apps Factory的创始人,该公司开发了App Cooker。
学习A星寻路算法是如何工作的!你是否在做一款游戏的时候想创造一些怪兽或者游戏主角,让它们移动到特定的位置,避开墙壁和障碍物呢?如果是的话,请看这篇教程,我们会展示如何使用A星寻路算法来实现它!在网上已经有很多篇关于A星寻路算法的文章,但是大部分都是提供给已经了解基本原理的高级开发者的。
本篇教程将从最基本的原理讲起。
我们会一步步讲解A星寻路算法,幷配有很多图解和例子。
不管你使用的是什么编程语言或者操作平台,你会发现本篇教程很有帮助,因为它在非编程语言的层面上解释了算法的原理。
稍后,会有一篇教程,展示如何在Cocos2D iPhone 游戏中实现A星算法。
现在找下到达一杯咖啡因饮料和美味的零食的最短路径,开始吧!:]一只探路猫让我们想象一下,有一款游戏,游戏中一只猫想要找到获取骨头的路线。
“为什么会有一只猫想要骨头?!”你可能会这么想。
在本游戏中,这是一只狡猾的猫,他想捡起骨头给狗,以防止被咬死!:]现在想像一下下图中的猫想找到到达骨头的最短路径:不幸的是,猫不能直接从它当前的位置走到骨头的位置,因为有面墙挡住了去路,而且它在游戏中不是一只幽灵猫!游戏中的猫同样懒惰,它总是想找到最短路径,这样当他回家看望它的女朋友时不会太累:-)但是我们如何编写一个算法计算出猫要选择的那条路径呢?A星算法拯救了我们!简化搜索区域寻路的第一步是简化成容易控制的搜索区域。
怎么处理要根据游戏来决定了。
例如,我们可以将搜索区域划分成像素点,但是这样的划分粒度对于我们这款基于方块的游戏来说太高了(没必要)。
作为代替,我们使用方块(一个正方形)作为寻路算法的单元。
其他的形状类型也是可能的(比如三角形或者六边形),但是正方形是最简单并且最适合我们需求的。
a星算法预处理路径

a星算法预处理路径A*算法是一种启发式搜索算法,用于在图形空间中找到两个点之间的最短路路径。
除了起点和终点之外,它还需要一个评估函数来评估每个节点到目标节点的距离。
因为这个评估值是启发式的,所以A*算法能够在搜索空间中快速找到最优解。
与其他搜索算法不同的是,A*算法可以在不搜索整个搜索空间的情况下,找到最短路径。
A*算法的核心思想是使用一个评估函数f(n)来评估每个节点n的最小反向代价估计,这个评估函数的值是从起点到当前节点的代价g(n)和从当前节点到目标节点的最小估计代价h(n)之和,即f(n)=g(n)+h(n)。
其中h(n) 是它到目标节点的估计距离,g(n)是从起点到节点n的实际代价。
A*算法的预处理路径是将整个图形空间进行分类,将每个点都归入不同的类别中。
这样做的目的是为了让算法能够更快地搜索到目标节点。
预处理路径的过程一般包括两个步骤:建立地图和预处理路径。
建立地图时需要将地图分为不同的区域,确定每个区域的关系,并将每个区域编号。
这部分需要涵盖一定的算法和数据结构知识,如图形数据结构、二维数组、树、模拟人类思维过程的“分而治之”等。
在将地图分为不同的区域时需要考虑地图是否要求精细化处理,比如是否需要考虑建筑物的复杂形状、地形的起伏等因素。
同时,也要考虑到预处理路径的计算效率,是否需要对地图进行简化处理。
预处理路径是指在搜索之前,通过一些算法来计算出每个点到目标点的距离,这样可以加速搜索过程。
这个过程涉及到的算法有 Dijkstra 算法、BFS 算法、Floyd 算法等。
其中Dijkstra算法是一种确定路径的算法,可以用于单源最短路径问题。
BFS算法是一种广度优先搜索算法,在小型地图上表现很好,但在大型地图上会面临内存瓶颈。
Floyd算法是一种动态规划算法,可以用于求任意两点之间的最短路径,但计算量比较大。
综合考虑,一般使用 A* 算法来计算预处理路径。
在预处理路径时,需要考虑选择合适的启发式算法来评估每个节点的距离,同时需要考虑到搜索空间的大小和节点数量。
astar(a星)算法(精)
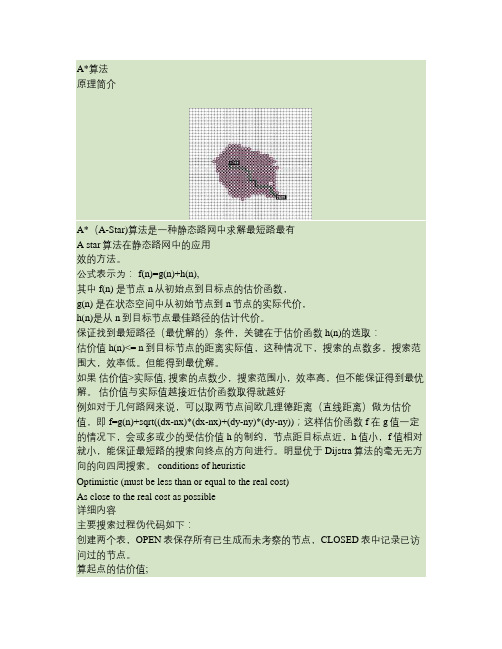
A*算法原理简介A*(A-Star)算法是一种静态路网中求解最短路最有A star算法在静态路网中的应用效的方法。
公式表示为: f(n)=g(n)+h(n),其中f(n) 是节点n从初始点到目标点的估价函数,g(n) 是在状态空间中从初始节点到n节点的实际代价,h(n)是从n到目标节点最佳路径的估计代价。
保证找到最短路径(最优解的)条件,关键在于估价函数h(n)的选取:估价值h(n)<= n到目标节点的距离实际值,这种情况下,搜索的点数多,搜索范围大,效率低。
但能得到最优解。
如果估价值>实际值, 搜索的点数少,搜索范围小,效率高,但不能保证得到最优解。
估价值与实际值越接近估价函数取得就越好例如对于几何路网来说,可以取两节点间欧几理德距离(直线距离)做为估价值,即f=g(n)+sqrt((dx-nx)*(dx-nx)+(dy-ny)*(dy-ny));这样估价函数f在g值一定的情况下,会或多或少的受估价值h的制约,节点距目标点近,h值小,f值相对就小,能保证最短路的搜索向终点的方向进行。
明显优于Dijstra算法的毫无无方向的向四周搜索。
conditions of heuristicOptimistic (must be less than or equal to the real cost)As close to the real cost as possible详细内容主要搜索过程伪代码如下:创建两个表,OPEN表保存所有已生成而未考察的节点,CLOSED表中记录已访问过的节点。
算起点的估价值;将起点放入OPEN表;while(OPEN!=NULL){从OPEN表中取估价值f最小的节点n;if(n节点==目标节点){break;}for(当前节点n 的每个子节点X){算X的估价值;if(X in OPEN){if( X的估价值小于OPEN表的估价值 ){把n设置为X的父亲;更新OPEN表中的估价值; //取最小路径的估价值}}if(X inCLOSE) {if( X的估价值小于CLOSE表的估价值 ){把n设置为X的父亲;更新CLOSE表中的估价值;把X节点放入OPEN //取最小路径的估价值}}if(X not inboth){把n设置为X的父亲;求X的估价值;并将X插入OPEN表中; //还没有排序}}//end for将n节点插入CLOSE表中;按照估价值将OPEN表中的节点排序; //实际上是比较OPEN表内节点f的大小,从最小路径的节点向下进行。
[Unity]A-Star(A星)寻路算法
![[Unity]A-Star(A星)寻路算法](https://img.taocdn.com/s3/m/7965322f4a35eefdc8d376eeaeaad1f3469311ef.png)
[Unity]A-Star(A星)寻路算法在游戏中,有⼀个很常见地需求,就是要让⼀个⾓⾊从A点⾛向B点,我们期望是让⾓⾊⾛最少的路。
嗯,⼤家可能会说,直线就是最短的。
没错,但⼤多数时候,A到B中间都会出现⼀些⾓⾊⽆法穿越的东西,⽐如墙、坑等障碍物。
这个时候怎么办呢?是的,我们需要有⼀个算法来解决这个问题,算法的⽬标就是计算出两点之间的最短路径,⽽且要能避开障碍物。
百度百科:A*搜寻算法俗称A星算法。
这是⼀种在图形平⾯上,有多个节点的路径,求出最低通过成本的算法。
常⽤于游戏中的NPC的移动计算,或线上游戏的BOT的移动计算上。
简化搜索区域要实现寻路,第⼀步我们要把场景简化出⼀个易于控制的搜索区域。
怎么处理要根据游戏来决定了。
例如,我们可以将搜索区域划分成像素点,但是这样的划分粒度对于⼀般的游戏来说太⾼了(没必要)。
作为代替,我们使⽤格⼦(⼀个正⽅形)作为寻路算法的单元。
其他的形状类型也是可能的(⽐如三⾓形或者六边形),但是正⽅形是最简单并且最常⽤的。
⽐如地图的长是w=2000像索,宽是h=2000像索,那么我们这个搜索区域可以是⼆维数组 map[w, h], 包含有400000个正⽅形,这实在太多了,⽽且很多时候地图还会更⼤。
现在让我们基于⽬前的区域,把区域划分成多个格⼦来代表搜索空间(在这个简单的例⼦中,20*20个格⼦ = 400 个格⼦,每个格式代表了100像索):既然我们创建了⼀个简单的搜索区域,我们来讨论下A星算法的⼯作原理吧。
我们需要两个列表 (Open和Closed列表):⼀个记录下所有被考虑来寻找最短路径的格⼦(称为open 列表)⼀个记录下不会再被考虑的格⼦(成为closed列表)⾸先在closed列表中添加当前位置(我们把这个开始点称为点 “A”)。
然后,把所有与它当前位置相邻的可通⾏格⼦添加到open列表中。
现在我们要从A出发到B点。
在寻路过程中,⾓⾊总是不停从⼀个格⼦移动到另⼀个相邻的格⼦,如果单纯从距离上讲,移动到与⾃⾝斜对⾓的格⼦⾛的距离要长⼀些,⽽移动到与⾃⾝⽔平或垂直⽅⾯平⾏的格⼦,则要近⼀些。
A-Star算法详解
B
34 30 24 20 14 30 10 40 14 50
→ → ↘ 38 40 34 30 38 40
44
44
50
↓
78
↗
58
↗
→ ← 14 50 10 60 14 70
50 64
A
↑
↙ 10 60
64
70 84
↗
70
↖
11.
第三次搜索: 1.遍历open list,找到其中F值 最小的方格。称其为选定方格。 这里会遇到两个问题: 当前open list中最小的F值为 50,但这两个方格均不经过已 经确定好的路径(红色格 子),所以需要重新选择路 径。 有两个F值为50的格子,选择 与目标点B直线距离最近的那 个。如果直线距离都相同,则 从时间角度上选择最后加入 open list 的那个格子。 综上,新选择的格子如图所示:
64 64
84 94
44 58
44
50
↓
↗
→ ← 14 50 10 60 14 70
50
64
A
↑
↙ ↖ 10 60
70
84
↗
70
↖
A*算法总结:
17.
1.把起始点加入 open list; 2.查找起始点周围所有可到达或者可通过的方格,把他们加入 open list。将 起始点设置为新加入的方格的父节点。 3.将起始点从open list中删除,加入close list中。 4.重复如下步骤: ①遍历open list,找到其中F值最小的方格。称其为选定方格。 ②对选定方格做如下操作:
↗
70
↖
15.
第n次搜索: 图中F值最小的格子为58,将其 选定,继续重复如上操作。 直至到达目标点B。 如图所示:
A星算法详细讲解_通俗易懂初学者必看

A星算法详细讲解_通俗易懂初学者必看A*算法是一种常用于路径规划的算法。
它是一种启发式的算法,通过估计距离来选择最有可能的路径。
这篇文章将详细介绍A*算法的工作原理和基本步骤。
A*算法的核心思想是维护一个开放列表和一个闭合列表。
初始时,将起点加入开放列表。
然后,从开放列表中选择一个节点,称为当前节点。
接下来,对当前节点的相邻节点进行处理。
将其加入开放列表并计算其启发式评估值。
启发式评估值通常是通过两个部分来计算的:G值和H值。
G值表示从起点到当前节点的实际代价,H值表示从当前节点到目标节点的估计代价。
可以使用欧几里得距离或曼哈顿距离等方式来计算H值。
在处理相邻节点时,需要判断它们是否已经存在于开放列表或闭合列表中。
如果节点已经存在于开放列表中,那么要比较新的G值和旧的G值。
如果新的G值更小,那么更新节点的G值和父节点。
如果节点已经存在于闭合列表中,那么忽略它。
在处理完相邻节点后,将当前节点加入闭合列表,并选择下一个节点作为当前节点。
重复这个过程,直到找到目标节点或者开放列表为空。
如果找到目标节点,就可以通过回溯从目标节点找到起点,得到最终的路径。
A*算法的优点是在保证找到最短路径的情况下,能够快速找到一个近似最佳路径。
它的效率较高,并且可以应用于不同的问题领域,如图像处理、游戏设计和机器人路径规划等。
然而,A*算法也存在一些限制。
由于它是基于启发式评估值的,所以在遇到复杂的迷宫或者障碍物时,可能不能找到最优解。
此外,A*算法也对内存的消耗较大,因为需要维护两个列表。
为了提高A*算法的效率和准确性,可以采用一些优化措施。
例如,可以使用二叉堆等数据结构替代列表,以提高节点的速度。
此外,还可以使用更精确的启发式函数来改进路径的估计。
总结起来,A*算法是一种常用于路径规划的算法。
它通过维护一个启发式评估值的列表来选择最有可能的路径。
虽然它有一些限制,但通过一些优化措施可以提高效率和准确性。
初学者可以通过详细了解A*算法的工作原理和基本步骤,来理解并应用该算法。
人工智能(A星算法)(一)

人工智能(A星算法)(一)引言概述:人工智能(A*算法)是一种用于路径规划的搜索算法,该算法被广泛应用于各个领域,如游戏开发、机器人导航等。
A*算法通过在搜索过程中综合利用启发式函数和已知信息,能够高效地找到最佳路径。
本文将介绍A*算法的原理和基本步骤,并探讨其在实际应用中的优势。
正文:1. A*算法的原理1.1 启发式函数的定义和作用1.2 评估节点的代价函数1.3 维护开放和关闭的节点集合1.4 估计最佳路径的方法1.5 A*算法的搜索策略2. A*算法的基本步骤2.1 初始化起始节点和目标节点2.2 将起始节点加入开放节点集合2.3 选择代价最小的节点进行扩展2.4 遍历邻居节点并更新代价值2.5 重复以上步骤直到找到目标节点或无可扩展节点3. A*算法在游戏开发中的应用3.1 实现敌人的路径规划3.2 优化AI角色的移动策略3.3 支持实时地图生成和动态障碍物避免3.4 提高游戏性和玩家体验3.5 减少计算资源的占用4. A*算法在机器人导航中的应用4.1 用于路径规划和障碍物回避4.2 实现智能家居的自动导航4.3 支持无人驾驶车辆的自动驾驶4.4 优化物流机器人的运输路径4.5 减少任务执行时间和成本5. A*算法的优势和局限性5.1 高效地找到最佳路径5.2 能够应对复杂的地图和动态的环境5.3 适用于多种应用场景5.4 可以灵活调整启发式函数进行性能优化5.5 在某些情况下可能出现局部最优解或搜索耗时较长的问题总结:本文介绍了人工智能(A*算法)的原理、基本步骤以及在游戏开发和机器人导航中的应用。
A*算法通过综合利用启发式函数和已知信息,能够高效地找到最佳路径,并且在多种应用场景中具有一定的优势。
然而,该算法也存在局部最优解和搜索耗时较长的缺点。
尽管如此,通过合理调整启发式函数和优化算法实现,A*算法仍然是一种高效的路径规划算法。
A 星算法

估计总路程
14 14 24
已走路程
1 2 1
代价计算
从起始节点考察每个邻节点,计算出从起始节点开始, 直到当前节点一共经过的路径长度.
这里的代价不一定是路程, 还可能是游戏中的危险或其他资源(能量,金币,活力等)的消耗
1.求出起点周围每个 节点的当前长度和 估算值. 2.把这些计算完了的 节点放入待考察表. 3.取出待考察表中估 算值最小的节点做 下一个要用来分析 的父节点 4.当前节点放入已考 察表
A_star是一种静态路网中求解最佳路径最有效的方法。
我下面写的这些也不是新方法,但是它概况了寻路的基本方法 和一些令人满意的标准的AS3解决方案。
没有最好的万能寻路方法,只有更适合某个游戏的寻路算法 在具体的寻路中,即便游戏不是由方块组成的时候,空间 必须划分为方形网格。因此,路径被描述为从 A 到 B 我们 经过的方块的集合。
用上次取出的最小估价 的父节点为当前节点.再 次进行四周的估价计算
从待考察表中删除父节 点
递归遍历整个地图,直到 遇到终点
在已考察表中找出一条最好的路径. 从终点向起点寻找最优解
当前节 点 0,1 0,2 0,1 上一个 节点 0,0 0,1 0,0 估计总 路程 14 14 24 已走路 程 1 2 1
...
...
....
....
_star 运算法则
节点(node): 本质上就是方形网格里的某一个方格(可以使任意形状) 父节点(parent node): 以一个点计算周围节点时,这个点就是其它节点的父节点。 估价函数(heuristic): 计算从当前点到终点估计代价的公式,通常有很多这样的公式, 但他们的运算结果质还是寻路。 在大多数时候,最佳 路线就是最短的那 条— —一条由最少方 格组成的路径。 但是在这里,我们需 要的是代价最小的路 径。从一点到另一 点需要一些代价。 距离,是代价的一个 方面——穿过两个方 格比一个需要的代价 “更大”— —但是还 有其他的代价。
A Star Algorithm A星算法

Notice: while g(n)=0, it is similar to DFS. While h(n)=0, it is similar to BFS.
A Star Algorithm program frame
Parameter:
Open Table: ascending queue, save nodes which have not been searched
Sufficient condition
Once following sufficient conditions are satisfied, the heuristic algorithm will be A Star algorithm that has optimal solution.
◦ 1.has optimal path from start node to target node in search tree; ◦ 2.limited solution; ◦ 3.all child’s nodes whose cost are greater than 0; ◦ 4.h(n)≤h*(n) (h*(n) is real cost)
Notice: for a search tree, we can know 1),2),3) easily but too hard to find out 4). If h(n) is smaller than and approximates to h*(n), which is considered as a good design.
A Star Algorithm process
Expand children
A-Star算法详解(1)
1.再次遍历open list,找到其中 F值最小的方格。也称其为选定 方格。 2.对选定方格重复前面的操作: • 从open list中取出放到close
list中。 • 检查与该方格相邻的每个格
子,忽略其中已在close list或 者不可通过的格子。 如果检查到的格子不在open list 中,则将其加入到open list。并 且将选定方格设定为他们的父节 点。 新加入的方格如图所示:
• 如果没有,不做操作。 • 如果有,将该方格的父节点设
置为选定方格,并重新计算其 F值和G值。
如图所示,检查后的G值为34和 38,比原来28,24大,所以不做 任何操作。
B
34 30 24 20 14 30 10 40 14 50
64 44 44 50 64
38 40 34 30 38 40
10 60
B
24 20 14 30 10 40 14 50
44 44 50 64
28 30 10 40
10 60
58 50 A 70
14 50 10 60 14 70
64 70 84
精选课件
8
8.
继续搜索:
• 如果检查到的格子在open list 中,则检查经过选定方格到达 该方格,是否有更小的G值。
• 如果没有,不做操作。 • 如果有,将该方格的父节点设
估价函数: 从当前节点移动到目标节点的预估费用。 其形式一般为:f(x) = g(x) + h(x); g(x)为从初始节点到节点x付出的实际代价; h(x)为从节点x到目标节点的最优路径的估计代价
开启列表(open list):存放待检查方格及其周围的状态为可移动的方 格。
关闭列表(close list):存放开启列表中保存的且不需要再次检查的方格。
A_star算法(A算法经典译文)

GameRes游戏开发资源网 Amit's A star Page中译文译序这篇文章很适合A*算法的初学者,可惜网上没找到翻译版的。
本着好东西不敢独享的想法,也为了锻炼一下英文,本人译了这篇文章。
由于本人英文水平非常有限,六级考了两次加一块不超过370分,因此本译文难免存在问题。
不过也算是抛砖引玉,希望看到有更多的游戏开发方面的优秀译作出现,毕竟中文的优秀资料太少了,中国的游戏开发者的路不好走。
本人能力有限,译文中有小部分词句实在难以翻译,因此暂时保留英文原文放在译文中。
对于不敢确定翻译是否准确的词句,本人用圆括号保留了英文原文,读者可以对照着加以理解。
A*算法本身是很简单的,因此原文中并没有过多地讨论A*算法本身,而是花了较大的篇幅讨论了用于保存OPEN和CLOSED集的数据结构,以及A*算法的变种和扩展。
编程实现A*是简单的,读者可以用STL对本文中的伪代码加以实现(本人已花一天时间实验过基本的A*搜索)。
但是最重要的还是对A*本身的理解,这样才可以在自己的游戏中处理各种千变万化的情况。
翻译本文的想法产生于2006年5月,实际完成于2007年4月到6月,非常惭愧。
最后,本译文仅供交流和参考,对于因本译文放到网上而产生的任何问题,本人不负任何责任。
蔡鸿于南开大学软件学院2007年6月9日原文地址:/~amitp/GameProgramming/相关链接:/%7Eamitp/gameprog.html#Paths我们尝试解决的问题是把一个游戏对象(game object)从出发点移动到目的地。
路径搜索(Pathfinding)的目标是找到一条好的路径——避免障碍物、敌人,并把代价(燃料,时间,距离,装备,金钱等)最小化。
运动(Movement)的目标是找到一条路径并且沿着它行进。
把关注的焦点仅集中于其中的一种方法是可能的。
一种极端情况是,当游戏对象开始移动时,一个老练的路径搜索器(pathfinder)外加一个琐细的运动算法(movement algorithm)可以找到一条路径,游戏对象将会沿着该路径移动而忽略其它的一切。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A Star Algorithm process
Expand children
Look around the white nodes, choose smallest node and then expand its children
choose the smallest white node whose f is 7
Sufficient condition
Once following sufficient conditions are satisfied, the heuristic algorithm will be A Star algorithm that has optimal solution.
◦ 1.has optimal path from start node to target node in search tree; ◦ 2.limited solution; ◦ 3.all child’s nodes whose cost are greater than 0; ◦ 4.h(n)≤h*(n) (h*(n) is real cost)
Output solution
How to output correct optimal path from Close Table which includes many void nodes ?
Parent nodes must be front of child nodes in Close Table. When the node is on optimal path, whose parent node must be on optimal path.
A Star Algorithm Idea
1.Seek f’s values from nodes which have not been searched, and use an ascending queue to save them (Nodes may be in different layer or path); 2.Choose the smallest one as current search node; 3.Pull out the head element from queue, figure out values of all children, and then put f into queue; 4.loop 1 to 3 steps until queue is null or we had found out the target.
N:(6,4) f=7 C:(6,4)
N:(6,5) C:(6,5) N:(6,6) C:(6,6) N:(5,6) N:(6,7) C:(5,6) C:(6,2) C:(1,3) N:(1,4) C:(1,4) C:(6,1) C:(6,7) N:(6,8) C:(6,8) N:(5,8) N:(6,9) C:(5,8) N:(4,8) N:(5,9) C:(4,8) N:(3,8) N:(4,9) C:(4,9) N:(3,9) C:(3,8) N:(3,7) N:(2,8) C:(3,7) N:(3,6) N:(2,7) C:(3,6) N:(3,5) C:(3,5)
What is Value Function?
f(n)=g(n)+h(n)
is one type of Value Functions.
◦ f(n) : assessment of every node which will be searched possibly. ◦ g(n): the cost from start node to current node, we often use the depth of current node as its value; ◦ h(n): the assessment from current node to target node. ◦ As a heuristic Algorithm, h(n) has relationship with whether the method is A Star Algorithm or not.
f=6.5
f=8
f=7.5 f=9.5
f=7.5
f=11
f=10.5 f=12.5
f=10 f=12
f=11.5 f=11.5
f=13 f=12 f=13 f=11.5 f=12.5 f=11
==CLOSE_Table==
(1,1)(2,1)(3,1)(4,1)(3,2)(3,3)(4,3)(5,3)(2,2)(2,3)(5,1)(6,3)(6, 4)(6,5)(6,6)(5,6)(6,2)(1,3)(1,4)(6,1)(6,7)(6,8)(5,8)(4,8)(4, 9)(3,8)(3,7)(3,6)(3,5)(4,5)
Start:(posX=1, posY=1) Target:(posX=4, posY=5) ----In search---C:(1,1) N:(2,1) f=6.5 C:(2,1) N:(2,2) f=6 N:(3,1) f=6 C:(3,1) N:(3,2) f=5.5 N:(4,1) f=5.5 C:(4,1) N:(5,1) f=7 C:(3,2) N:(3,3) f=5 C:(3,3) N:(2,3) f=6.5 N:(4,3) f=4.5 C:(4,3) N:(5,3) f=6 C:(5,3) N:(6,3) f=7.5 C:(2,2) C:(2,3) N:(1,3) f=8 C:(5,1) N:(6,1) f=8.5 C:(6,3) N:(6,2) f=8
Notice: while g(n)=0, it is similar to DFS. While h(n)=0, it is similar to BFS.
A Star Algorithm program frame
Parameter:
Open Table: ascending queue, save nodes which have not been searched
Example
Question: find out the shortest path between two areas.
For this problem, using Hamilton Distance (|x1-x2|+|y1-y2|) or Euclid Distance ( ) as h(n) will find the shortest path quickly.
Advance of A Star Algorithm program fArray, note all searched nodes’ parent node searching sequence; NATable: Array, note the best answer; … 2.While current node is not Target Node && Open Table is unNull … d) Remove c node from open table, put it into closed table and parent to Parent Table; … 3.Initialize CLOSE[i] point to target node in Close Table, and put it into NATable. a)While CLOSE[i]!= CLOSE[0]: b)According to PARENT[i], find CLOSE[i]’s parent in Close Table; c)CLOSE[i] point to parent; d)Copy CLOSE[i] to NATable; Wend 4.Output NATable.
Notice: for a search tree, we can know 1),2),3) easily but too hard to find out 4). If h(n) is smaller than and approximates to h*(n), which is considered as a good design.
Closed Table: array, save searched nodes. Start Node: start node Target Node: target node c Node: current search node Processing: 1.Initialization.Put Start Node into Open Table; 2.While current node is not Target Node && Open Table is unNull a) set c point to the head node of Open Table; b) Seek all c’s child node; c) Calculate each child node’s f; d) Remove c from Open Table, put it into Closed Table; e) put all c’s child nodes into the ascending Open Table Wend; 3.Output search result.
A Star Algorithm is belongs to Heuristic Algorithm
◦ A Star Algorithm define as: Choosing next node which should be least cost that as a heuristic function from current node. If there has more than one least cost nodes, we can choose the nearest one as next node. Usually, a good heuristic function obtains optimal solution in a few time.