KUKA七轴电机更换指导文件.
KUKA外部轴配置方法,偷偷分享的
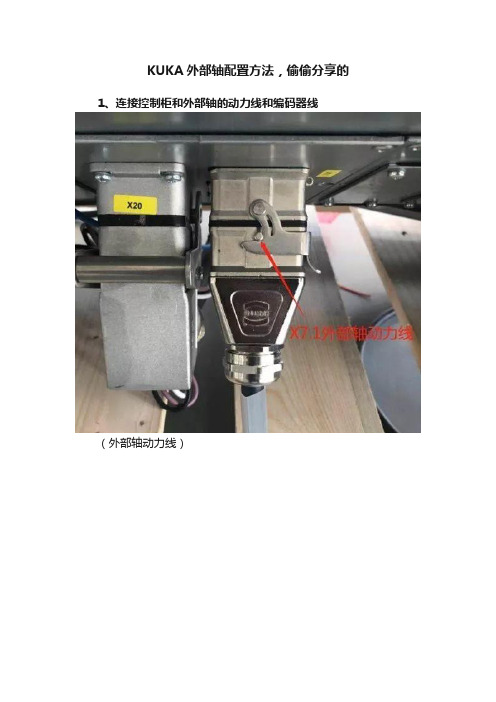
KUKA外部轴配置方法,偷偷分享的1、连接控制柜和外部轴的动力线和编码器线
(外部轴动力线)
(连接机器人底部RDC编码器线)
2、Workvisual外部轴添加与配置
(1)根据机器人控制柜内部实际的KPP和KSP型号添加:(右键控制系统组件添加)
(2)确认电机铭牌上的电机型号:
(开头MG/ME光轴与键槽轴的区别)
(3)根据电机型号添加选项:
(右键设备视图添加电机型号)
(4)在单元配置中将添加的外部轴电机与控制柜连接:(拖住电机连接控制柜)
(5)右键电机--驱动装置配置--(根据实际接线图连接电机):
(外部轴电机连接错误,导入项目提示报警编码器故障):
(6)右键电机--机器参数配置(配置电机需要的参数):
(7)配置完成后,项目编译导入机器人控制柜。
(8)导入项目后进行安全配置:(注意切换安全员用户)
(9)外部轴零点丢失(进行零点校正):
(10)外部轴动作方式的切换:。
KUKA 机器人调试标准化作业指导书

----------------------------------------- 此处增加空格,使注释与位置点层次分明 LIN P6 Vel= 0.15 m/s CPDAT1 SEARCH VIA P7 CD1 PA0 Tool[1]:tcp Base[17]:e_45
X、Y、Z : 工具坐标系统的原点,针对法兰坐标系统
A、B、C: � 工具坐标系统的取向,针对法兰坐标系统
5
� TCP 测量方法 a)XYZ—4 点法:确定工具原点相对机器人法兰坐标系原点的位置。 b)准备运行→测量→工具→XYZ 4 点
4-点检测对话窗口打开:
6
c) 为要测量的工具给定一个编号和名称。用 OK 键确认。自动打开下一个窗口
10
认。 f) 按下保存键
五.校直线轴及校变位机的坐标系
� 外部运动系统的数据(耦合关系)必须正确地输入机床数据中 a) Setup>Service>Axisconfigurtor
b) 进入到“Est.Kinematics”表格中(见下图)。
11
c) 在表格中将这个运动系统中固定的不变的数据输入。(最多能存储 6 个外部运动系统的数据,直线轴坐标
8
选择这个菜单后,下面的对话窗口打开:
b) 输入已安装工具的编号。用OK键确认。
9
c) 用 TCP 驶至任一个参考点(将焊枪喷嘴垂直水平面, TCP 200mm范围没有碰撞物),用OK键 确 认 。
库卡机器人维保操作规程
库卡机器人维保操作规程一、程序备份由专业人员进行程序备份,备份前必须对U盘进行病毒查杀确认无误。
二、换油(型号:Castrol嘉实多Optigear Synthetic RO150 20L)1、五个伺服电机安装部位均需更换库卡专用油;2、更换前先将进油口处进行清洁;3、放油:收纳至桶内,统一进行处理,放完后装好出油口;4、记录放出的油量,便于加油时明确加油量;1)轴1:4.75L2)轴2:0.7L3)轴3:1.9L4)轴4:0.8L5、加油:待油放尽后,从各伺服电机进油口进行加油;1)轴1:5.6L2)轴2:0.8L3)轴3:1.9L4)轴4:0.8L5)轴5:0.3L6、加油完成后紧固进口螺栓,确保不泄露。
三、机器人本体检查1、电缆接头检查、线路有无破损检查;2、螺丝紧固及清灰工作。
四、控制柜检查1、柜内外清灰,机柜背部打开保护壳,对散热风扇等清灰除尘;2、电路板供电电池(型号:威神VISION CP1250H 12V 5AH)电源电压低于12V时,进行更换。
注:更换电池时,可不必断电,逐个进行更换;3、控制柜电源电压检测(380V)是否平衡;4、24V电源接头检测,用万用表测量电压。
五、示教器检测1、鼠标手柄检测,上下左右操作顺畅;2、手自动转换键检测,转换自如;3、屏幕显示检测。
六、限位报警检测1、手动操作机器人各轴,查看限位报警是否正常;2、检查各轴机械动作是否正常;3、检查机械手转向、起落、抓放功能是否正常。
七、急停开关检测1、手动检测急停开关是否正常;2、报警后检测复位功能是否正常。
八、机器人运行实测维护完成后,上料进行运行实测,完成一组托盘码放程序。
九、维护结束填写相关维护记录。
kuka调试文档(优选.)

分几部分调试过程中涉及到的电路原理图,见设计原理图。
接线按照电气原理图,接线即可。
上电线接好后上电RDT第一次上电,在示教盒界面上会提示“从机器人读取信息”,选择读取。
机器人的相关信息就会读到控制柜内部的工控机。
具体操作如下:登陆专家权限,“set up”->”robot data”->,弹出状态窗口,提示“从机器人读取数据信息到硬盘”或是“从硬盘读取信息到机器人”。
选择“从机器人读取数据到硬盘”Master出厂前,厂家检验了各个轴,一般来说,我们上电后,由于最初是吊装姿态。
所以会提示2轴丢失。
从新检测校验2轴即可。
按“开机运行”菜单键,一个菜单键打开,选择“校正”选项,确定选择“千分尺”。
如下图:打开一个待校正的状态窗口:需要校正的轴按顺序显示,下一个需要校正的轴彩色背景显示。
已经校正好的轴补列出。
2轴丢失,校验2轴即可。
两项驱动配置(Device net和Profibus驱动配置)除原有文档相关说明,还需播地址设置波特率1-6地址组合7-8波特率组合在Device NET适配器上有标明的相关说明,根据需要按照说明设置即可。
KUKA与Devicenet之间的I/O配置总结1、将Devicenet模块装好,数字输入、数字输出、模拟输入、模拟输出各模块之间的顺序可以任意。
但是要注意:WAGO的Devicenet模块中,模拟量的地址在数字量之前,需要先配置模拟量。
2、配置I/O需要专家权限。
按菜单:Configure ——> User Group按下方功能键“expert”,在状态窗口输入密码(KUKA),按回车等待进入专家界面。
3、在KUKA的KCP上按菜单:Configure——> I/O Driver ——> I/O Driver Reset在状态窗口上出现机器人控制器中安装的所有I/O驱动,选择devicenet,按下方功能键“Config.”,状态窗口下方出现devnet.ini,选择这个文件按回车打开文件,在这个文件中设置波特率(baudrate)和栈号(macid,即拨码开关号)。
(完整版)KUKA简单操作说明书

KUKA简单操作说明书一、KUKA控制面板介绍1、示教背面在示教盒的背面有三个白色和一个绿色的按钮。
三个白色按钮是使能开关(伺服上电),用在T1和T2模式下。
不按或者按死此开关,伺服下电,机器人不能动作;按在中间档时,伺服上电,机器人可以运动。
绿色按钮是启动按钮。
Space Mouse为空间鼠标又称6D鼠标。
2、示教盒正面急停按钮:这个按钮用于紧急情况时停止机器人。
一旦这个按钮被按下,机器人的伺服电下,机器人立即停止。
需要运动机器人时,首先要解除急停状态,旋转此按钮可以抬起它并解除急停状态,然后按功能键“确认(Ackn.)”,确认掉急停的报警信息才能运动机器人。
伺服上电:这个按钮给机器人伺服上电。
此按钮必须在没有急停报警、安全门关闭、机器人处于自动模式(本地自动、外部自动)的情况下才有用。
伺服下电:这个按钮给机器人伺服上电。
模式选择开关:T1模式:手动运行机器人或机器人程序。
在手动运行机器人或机器人程序时,最大速度都为250mm/s。
T2模式:手动运行机器人或机器人程序。
在手动运行机器人时,最大速度为250mm/s。
在手动运行机器人程序时,最大速度为程序中设定的速度。
本地自动:通过示教盒上的启动按钮可以使程序自动运行。
外部自动:必须通过外部给启动信号才能自动执行程序。
退出键:可以退出状态窗口、菜单等。
窗口转换键:可以在程序窗口、状态窗口、信息窗口之间进行焦点转换。
当某窗口背景呈蓝色时,表示此窗口被选中,可以对这个窗口进行操作,屏幕下方的功能菜单也相应改变。
暂停键:暂停正在运行的程序。
按“向前运行”或“向后运行”重新启动程序。
向前运行键:向前运行程序。
在T1和T2模式,抬起此键程序停止运行,机器人停止。
向后运行键:向后运行程序。
仅在T1和T2模式时有用。
回车键:确认输入或确认指令示教完成。
箭头键:移动光标。
菜单键:用菜单键打开相应菜单,通过箭头键选择子菜单,回车键使选中的菜单被应用。
用退出键退出打开的菜单。
更换电机轴承安全操作规程
更换电机轴承安全操作规程操作前准备1、穿戴好劳动保护用品。
2、准备工具、用具:900mm、450mm管钳各1把、375mm、300mm活动板手各1把、专用套筒板手1只、拔轮器1套、0.75kg锤子1把,专用小拔轮器1套,细砂纸2张、高速黄油1000g、软金属棒1根、1000mm撬杠2根、同规格的电机轴承2套,绝缘手套1只,试电笔1支,记录笔,班报表。
操作步骤1、用试电笔检测电控柜外壳确认安全,打开打控柜门,按停止按钮,根据油井实际生产的情况,将抽油机驴头停在合适位置,刹紧刹车,侧身拉闸断电,关好电控柜门,断开铁壳开关,记录停抽时间,检查刹车,以刹车锁块在其行程范围的1/2~2/3之间,各部件连接好为宜。
2、电机轴有锥度或带套子可先将电机皮带轮固定螺母卸下或将盖板卸下。
3、卸下电机前顶丝,卸松电机的四条固定螺丝,用撬杠将电机向前移动,将传动皮带卸下。
4、更换电机皮带轮一端轴承:将拔轮器装好,用管钳咬住拔轮器顶丝后端,用力均匀转动顶丝杠,将电机皮带轮卸下。
5、用板手卸下电机轴承盖固定螺丝,卸下轴承盖,卸下电机端盖。
6、将专用小拔轮器装好,用管钳咬住拔轮器顶丝后端,用力均匀转动顶丝杠,将电机原轴承卸下。
7、清理干净电机定子轴,套上新轴承,垫上软金属棒,用榔头均匀敲进安装到位。
8、对新换轴承涂黄油保养润滑,装好电机端盖和电机轴承盖,上好电机皮带轮和传动皮带。
9、更换电机风扇一端轴承:卸下电机风扇罩盖,用卡钳取下风扇卡簧,卸下电机风扇,卸掉电机风扇端的电机端盖。
10、按1.32.2.6~1.32.2.7的操作步骤更换轴承。
11、对新换轴承涂黄油保养润滑,装好电机端盖和电机风扇,上好电机风扇罩盖。
12、检查抽油机周围无障碍物,缓慢松刹车,合上铁壳开关。
用试电笔检测电控柜外壳,确认安全,打开电控柜门,侧身合闸送电。
按启动按钮,利用曲柄惯性启动抽油机,关好电控柜门,记录开抽时间。
13、收拾擦拭工具、用具,并摆放整齐。
KUKA七轴电机更换指导文件

信息 高效 落实
信息 高效 落实
Karosseriebau T-C-PR-2
KUKA七轴电机更换指导书
2013年06月06日
信息 高效 落实
重点注意事项
重点关注 1、更换电机时注意轻拿轻放,防止损坏电机。 2、电机从减速器抽出或者装入减速器时要注意水平运动,防止电机和减速器 的花溅磨损。 3、新安装的电机的电源线插头方向可能和原来的插头方向不一致,如果方向 不一致导致原电缆长度不够的话,可以先更改插头方向,之后再进行电缆连接。 4、电机安装完毕后要进行力矩校验,防止力矩不够。 5、电机更换工作完成后要注意清理现场,防止废弃物或者工具遗留在现场卡 入机器人七轴轨道内。 6、更换完电机后,无论机器人零点丢失与否都要对七轴进行零点校正(一般 情况下更换完电机,机器人零点丢失,机器人要提示进行零点校正)。 7、所有工作完成后要进行手动试车,防止出现零点偏差而导致轨迹偏移。
信息 高效 落实
测试过程
第一步:开机
机器人柜开机,把机器 人打到七轴零点的预校 准位置。
第二步:零点校正
把EMT连接到机器人上, 对机器人七轴零点进行 重新校正。
信息 高效 落实
测试过程
第三步:手动试车
机器人手动打回原点进 行手动试车。先慢速进 行走轨迹以免发生碰撞。
第四步:自动试车
手动试车没有问题后, 把机器人上自动进行试 车,上自动时速度也要 逐渐加上去。
信息 高效 落实
拆卸过程
第一步:关机
把机器人打到合适位置 后,保存机器人零点数 据后关机。
第二步:拆电缆
拆下七轴电机的电源线 和编码器线。拆下后注 意保护电缆接头。
信息 高效 落实
拆卸过程
第三步:拆卸螺栓
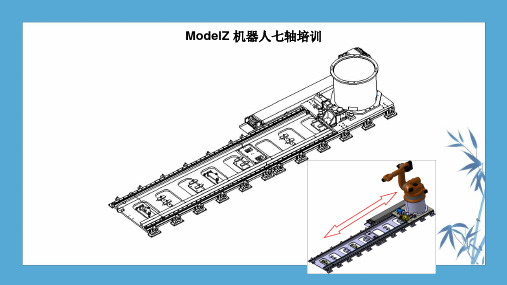
KUKA工业机器人培训资料ModelZ 机器人七轴培训 V1.1
安装基准面
底座
齿条安装、更换
相反齿条
六、齿条安装
安装步骤:
⒈设备第一次安装时,齿条按顺序放置于基 准面上。
[注意]:a.安装或更换前,首先检查基准面, 确保其表面无杂质; b.固定齿条时应逐渐逐个紧固锁紧 螺栓。
⒉当需要更换齿条时要求:利用相反齿条固 定连接结构逐个操作(即卸下一根安装 一根)
齿条
七、七轴安装
安装步骤: ⒈ 首先,将伺服电机和减速机连接好。 ⒉ 其次,将齿轮与减速机(间隙配合H8/h7)连接好。 ⒊ 将减速机连接于机座上,机座固定螺栓稍施加点预紧力,将塞尺(0.15mm)置于齿条上,
在Y向上整体调整齿轮齿条的中心距,调整好后抽出塞尺锁紧机座上的固定螺栓即可。 ⒋ 拆卸更换齿轮时,将减速机与齿轮整体拆下,均匀轻敲齿轮周边直至卸下更换。
4.2齿轮、齿条润滑保养
齿条图号:78-38D_412069_____05~(厂商:大连奥托) 齿轮图号:78-38D_412069_____25~(厂商:大连奥托) 维护原则:
①定期(1个月)进行齿轮、齿条润滑的检查; ②当发现七轴的直线往复重复精度>0.1mm时,可以请专业人员对齿轮、齿条进 行检测分析,如果损坏即刻更换。
Y
塞尺
八、Z向高度检测装置
功能:用于设备使用过程中阶段性监测(主要是目测) 安装步骤: 安装参考基准:地面Z向检测基准面,安装应参考底座位置; 安装位置:在近机器人工作端根据设备长度增加2处或3处; 检测:
空载时,两侧导轨测量一组比较数据; 满载时,同上。 如果偏差值>0.2mm即可维修调整。
Z向高度检测步骤: ① 首先,进行维护前操作安全检查,确保安全后操作人员方可进
齿轮 加油器油杯 加油器油杯
维修预案(库卡机器人7轴伺服放大器更换)
检查没有漏插插头
开电,等待机器人电脑开机,确认伺服放大器上的指示灯亮 等待机器人电脑开机,确认示教器屏幕信息
关闭机器人电源开关,等待机器人电脑关机,风 扇停止,示教器屏幕关闭即为已经关机
验电,并在机器人电源开关挂警示牌
记录好原来插头的位置、编号及方向
拔伺服放大器的所有插头(6个)
拔除完毕确认是否遗漏
用小螺丝刀撬开伺服放大器的卡扣(上、下)
用手拿伺服放大器中部,均匀轻轻向外拔, 遇到拔出困难时用小一字批撬开卡扣
准备一个新的伺服放大器,检查所有接头形式和数量跟原来一样 检拿伺服放大器中部,按原来的方向插回 支架槽中
确认上下两个卡扣完全闭合,并用一字批把 卡扣稍微向伺服放大器扳回
按原来的插头位置插回伺服放大器上,注意编号和方向跟 原来一致,插头插到位时会有“啲”的声音,往外拔一下 确认是否可以拉出并重新插回
KUKA-机器人日常维护手册

焊接机器人日常维护保养手册
一.日检查及维护
1.送丝机构。
包括送丝力距是否正常,送丝导管是否损坏,有无异常报警。
2. 焊接过程中检视导电嘴是否磨损过大,是否需要更换。
3.气体流量是否正常。
4.检查平衡吊拉力是否足够。
5.水循环系统工作是否正常。
6.每班交接时通过cal-tcp程序检查TCP精度。
7.每60分钟手动清理喷嘴内部的焊渣。
二.周检查及维护
1.擦洗机器人各轴。
2.检查TCP精度。
3.检查清渣油油位。
4.检查机器人各轴零位是否准确。
5.清理焊机水箱后面的过滤网。
6.清理压缩空气进气口处的过滤网。
7.清理焊枪喷嘴处杂质,以免堵塞水循环。
8.清理送丝机构,包括送丝轮,压丝轮,导丝管。
9.检查软管束及导丝软管有无破损及断裂。
(建议取下整个软管束用压缩空气清理)
10.检查焊枪安全保护系统是否正常,以及外部急停按钮是否正常。
11. 检查焊枪枪夹是否有松动。
三.月检查及维护
1. 清理导轨灰尘,并加润滑油。
(导轨上有油壶,普通机油即可)如下图。
2.送丝轮滚针轴乘加润滑油。
(少量黄油即可)
3.清理清枪装置,加注气动马达润滑油。
(普通机油即可)
4.用压缩空气清理控制柜及焊机。
5.检查焊机水箱冷却水水位,及时补充冷却液
6. 控制柜内灰尘定时用干燥的压缩空气清理(此项可请电工来执行)
7.完成1—6项的工作外,执行周检的所有项目。
06——KUKA C4伺服焊枪虚拟七轴配置指导书

14
电气维修工段
Electrical Maintenance Section
10
KUKA C4 虚拟七轴配置指导书
执行PROCONS_IO:
根据工业以太网配置,必须对 SoftPLC的过程数据进行设置。
1:点击投入运行-售后服务PROCONS_IO 2:点击创建
电气维修工段
Electrical Maintenance Section
电气维修工段
Electrical Maintenance Section
2
KUKA C4 虚拟七轴配置指导书
简介:
B8L项目上采用的自动焊枪为气伺服焊枪,
工作原理: 库卡SynchroMove在12ms的周期内读入虚拟七轴的位置并将额定位置写入现 场总线系统。外部驱动装置的实际位置也在12ms的周期内读入。由额定位置 和实际位置计算滞后误差,超过滞后误差极限时,会触发机器人运动的停止。
电气维修工段
Electrical Maintenance Section
7
KUKA C4 虚拟七轴配置指导书
配置现场总线:
第四步:配置机器人过程数据 I/O
电气维修工段
Electrical Maintenance Section
8
KUKA C4 虚拟七轴配置指导书
添加虚拟七轴:SmartPAD上安装
电气维修工段
Electrical Maintenance Section
5
KUKA C4 虚拟七轴配置指导书
配置现场总线:
第二步:按焊枪上安装的FESTO模块进行硬件组态
电气维修工段
Electrical Maintenance Section
6
KUKA设备调试维修资料
练习:
安装正确的机器人数据以及验证
设定机器人软限位 对机器人所带工具进行负载测试
Reference point XT
ool
TC P
第三步:在Y正方向上取一 点向Y负方向运动,确定Y 方向
A B C- 2点
第三步:在Y正方向 上取一点向Y负方向 运动,确定Y方向
ZT
ool
Reference point
YT
ool
T C P
XTool
ABC全局 ABC全局(5D)方法 ABC全局(6D)方法
控制电柜计算机内同时有两套操作系统工作 VxWorks 基本系统 基本系统处理工作程序,并且控制机器人 Windows系统 负责基本系统的操作 编程人员的所有操作都是在Windows视窗下进行的 在设备上电时, Windows系统首先启动,之后启动CROSS3,该程序按照给 定顺序执行下列程序: Cross.exe Kukaftpd.exe Upvxwin.exe Kukadb.exe Kukabof.exe 两个系统通过TCP/IP协议彼此进行数据交换, VxWorks 是基本系统.所有 其它的程序都在Windows系统 下运行.
使用这种方法时, 必须将工具相对 于全局坐标系进 行安装,放入时, 工具坐标系统轴 必须平行于全局 坐标系统的轴
方向固定不变
练习: 利用4点法测量工具TCP点 利用ABC2点法测量工具方向
利用ABC全局法测量工具方向
电机轴承更换标准作业指导书
电机轴承更换标准作业指导书1 目的为确保电机轴承更换操作有规可循,特制定本操作规程。
2 范围本操作规程适用于厂务部380V/1KW-75KW系列电机轴承更换操作。
3 参考文件无。
4 定义无。
5 职责电机轴承维修工作由系统工程师主导,维修技术人员协助进行;6 资历与训练电机轴承维修工作需经过相关操作资格培训且合格之维修技术人员。
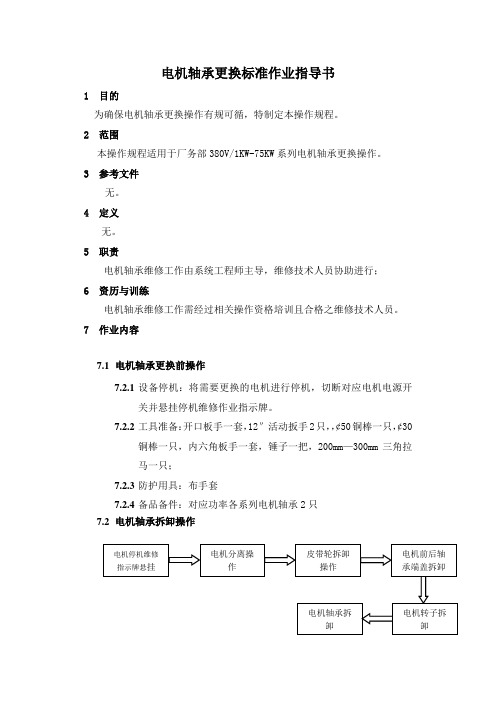
7 作业内容7.1电机轴承更换前操作7.2.1设备停机:将需要更换的电机进行停机,切断对应电机电源开关并悬挂停机维修作业指示牌。
7.2.2工具准备:开口板手一套,12″活动扳手2只,,¢50铜棒一只,¢30铜棒一只,内六角板手一套,锤子一把,200mm—300mm三角拉马一只;7.2.3防护用具:布手套7.2.4备品备件:对应功率各系列电机轴承2只7.2电机轴承拆卸操作7.2.1电机停机维修指示牌悬挂:将需要维修的电机进行停机并断开电机开关悬挂好维修作业指示牌,拆卸电机上的各连接线(拆卸电机上的接线时注意对各个接线做好相应相序标识以免接线恢复时造成接线错误);电机接线端子相序标记和拆卸7.2.2电机分离操作:将电机与所带负载侧分离A、风机类:风机类电机松开电机与风机的三角带连接;B、水泵类机:水泵类电机松开电机与水泵的对应连轴器件;7.2.3皮带轮拆卸操作:使用合适的板手先松开皮带轮上定位螺丝,用合适尺寸拉马勾在皮带轮近轴承侧,使用板手向内紧入顶杆,直到皮带轮松脱后取下皮带轮(注意皮带轮在拆卸过程中拉马的各受力点需要一至,拉拔过程中用力要均匀防止拉破皮带轮边缘)。
电机皮带轮拆卸操作7.2.4电机前后轴承端盖拆卸:使用合适板手松开轴承端盖紧固螺丝,拆卸前后轴承端盖;电机前后轴承端盖拆卸7.2.5电机转子拆卸:将电机转子从定子套中轻轻拖出(注意:拆卸转子时注意转子不要碰到定子漆包线圈,以免损坏线圈绕组)电机转子拆卸,定子分离7.2.6电机轴承拆卸:用合适尺寸的拉马将转子轴承从轴杆中拉出(拆卸轴承时注意力度均匀,以免损坏轴杆);电机轴承拆卸操作7.3电机轴承安装7.3.1轴承安装:将轴杆表面和轴套内预先涂抹适量黄油做润滑,使用铜棒将轴承均匀打入轴杆和轴套内,轴承装入轴杆后可用手轻轻旋动轴杆观察轴承安装是否与轴杆轴心一至,如轴杆旋动阻力大需要对轴承重新进行安装;7.3.2轴杆安装:使用铜棒沿轴杆轴心方面均匀用手将轴杆打入轴套内;7.3.3轴承端盖安装:依次将轴杆前、后端封盖套入轴杆内并锁紧封盖上螺丝;7.3.4电机与负载端安装:将电机安置在机座上并锁紧螺栓,调整机座水平,使用电机与负载端相连;7.3.5电机试运行:电机轴承装入后安相应相序要求接入电源线,点动测试电机运行状况,点动无正常后正常启动测试运行电流,确认安装无异常;7.3.6维修记录归档:试机正常后填写维修保养报告并归档。
库卡节能伺服节电机使用手册
库卡节能伺服节电机使用手册节能伺服电机使用手册1、各按键的用途:(1)“P”键的用途:第一:“P”键为上、下停针键,按下“P”键,上灯孔亮,为上停针;下灯孔亮,为下停针;两个灯孔都不亮,为自由停针;第二:功能进入键(见进入参数的操作方法)(2)“S”键的用途:第一:“S”键为机头灯开关键,按下“S”键,当“S”键上的小灯亮为打开机头灯,灭为关掉机头灯。
第二:功能参数(确认)键(见进入参数的操作方法)(3)“+”、“-”键的用途:此两个键用于转速调整和参数调整。
2、进入参数的操作方法例:怎样把电机的顺时针转调到逆时针转:第一步:打开电源;第二步:先按“P”键不放,同时按“+”键,此时画面会显示P-00.第三步:按“+”键,把P-00调至P-02,(P-02)就是电机正反转参数(常用参数表上有标明);第四步:按下“P”键画面会显示“1”;第五步:按下“-”键把“1”调到“0”(“1”为顺时针转,“0”为逆时针转,常用参数表上有标明);第六步:按下“S”键确定参数调整完成。
3、恢复出厂设置恢复出厂设置方法:先按“P”键不放,同时按“+”键,此时画面会显示P-00,再长按“S”键约3秒即可。
4、电机常用参数设置序号参数编号参数名称参数范围出厂设置备注1P-01最大速度锁定200-6500RPM4400转2P-02电机方向0是逆时针1是顺时针13P-04起缝速度200-800转250转4P-05加速快慢2000-4000转3000转5P-06NC NC06P-10NC NC07P-11NC NC08P-12NC NC5s9P-14最大电流限制50-45030010P-15NC NC15、一般故障处理:序号错误码错误内容错误问题的多种可能1Er01找不到停针位1.手轮靠的不够近间隙在2.5mm内2.九针插头接触不良3.电机霍尔坏,要更换电机4.手轮上的磁铁掉落2Er02开机没有检测到调速器1.调速器插头没有插2.调速器线断了或接触不良3Er03电机霍尔或相应线错误1.九针插头接触不良2.电机没有安装好,参照图A3.霍尔坏4Er04堵转保护 1.电机过载2.电机与电控箱连接的四芯线接触不好3.电机断线或坏了5Er05硬件过流保护 1.电机过载2.信号线接触不好或断了3.主板坏了6Er07串口通信超时错误显示屏至主板信号线不良或主板坏7显示屏无电开关有电1.主板坏2.显示屏与主板连接线接触不良。
kuka机器人操作说明(草稿)(精选5篇)

kuka机器人操作说明(草稿)(精选5篇)第一篇:kuka机器人操作说明(草稿)系统自动运行操作流程(草稿)1,打开气源2,机器人开机3,T1模式,手动操作,进入专家界面(菜单“配置”下选择“用户组”,选择“专家“,输入密码“KUKA”)4,首先查看,菜单“显示”下选择“WINACPANEL”,查看PLC是否运行,或者查看三色灯黄灯是否亮5,然后,I/O重新配置,菜单“配置”下选择“输入输出”,再选择“输入输出重新配置” 6,选择CELL程序,手动运行CELL程序(RUN HOME时,即机器人运行到HOME时,要注意观察有无干涉),机器人到HOME点后,继续启动运行CELL程序(再按一次KCP上“启动“),运行到“AUTOEXT INI”这一行后;再选择菜单“程序“下其“程序复位”选项,然后,再手动运行CELL程序到HOME点这一行即可7,确认信息8,选择“EXT”模式,即外部自动模式9,按KOP上“复位”按钮(确认安全门)10,注塑机选择自动11,再按“启动”按钮12,再按注塑机上“启动”按钮13,系统启动另外:1,模具间有工件的处理:注塑机选择手动,再按一下KOP上“功能键“按钮;机器人手动回HOME点(注意干涉),CELL程序复位,系统再重新启动运行。
2,夹具掉件的处理:(掉件启用时)a,系统自动运行,掉件,确认信息,出现等待(WAIT FOR $IN[357]),此时,可以取消等待(按一下KOP上功能键),系统正常运行回HOME点(不带件)。
b,系统自动运行,掉件,确认信息,没有出现等待,则系统正常运行回HOME点后(不带件),再按一下KOP上“功能键“按钮。
c,若是系统自动运行,掉件,机器人停在中间,则确认信息,手动把机器人带回安全位置,然后,再重做上面“系统自动运行操作流程“第5步开始以后的步骤即可。
注意:如果掉件暂时不用报警信息提示,则可以把R1Systemsps.sub文件打开,文件里面:IF $IN[291] THENIF $IN[291] THENGRP_MSG(1)改为;GRP_MSG(1)即可。
KUKA机器人操作

KUKA操作一:引言本文档旨在提供关于KUKA操作的详细指南,以帮助用户熟悉和正确使用该设备。
以下章节将介绍如何进行基础设置、程序编写与调试等相关内容。
二:系统要求1. 硬件配置:确保计算机及其配套设备满足最低系统要求。
2. 软件安装:按照官方指导手册中的步骤安装并配置所需软件。
三:快速入门1. 连接电源和网络线:根据说明书连接适当的电源和网络线,并确认正常工作。
2. 启动控制台:按下开启按钮,触发启动过程,并注意检查是否有异常情况出现。
3. 标定末端执行器(TCP)位置:a) 将夹具或传感器固定到末端执行器上;b) 执行标定程序,在特定点处记录当前坐标值;c) 重复以上步骤直至所有需要用到不同姿态角度时都完成了相应数据采集;四:运行模式选择与切换1. 示教模式(Teach Mode): 在此模式下可以通过手柄来示范性地移动机械臂,同时也能实时监测各个轴向状态。
2. 自动模式(Auto Mode): 在此模式下,将按照预先编写的程序自主执行任务。
五:示教操作1. 示范性移动:通过手柄控制机械臂进行位置和姿态调整;2. 记录点位:在特定位置上记录当前坐标值,并保存为一个目标点;3. 连续路径运行:连接多个已经存储好的目标点以形成连续路径,并观察其轨迹是否符合要求;六:程序编写与调试1. KRL语言基础:a) 了解KUKA Robot Language (KRL) 的基本结构和规则;b) 学习如何定义变量并赋予初始值;七:安全注意事项1. 操作前检查所有设备及电源线路是否正常工作;2.遵循相关法律法规,在使用过程中确保周围环境无障碍物或危险因素存在;3.禁止未经许可拆除或更改任何关键部件。
八:附件列表- 附件一:“KUKA快速入门指南”- 附件二:“术语表”以上是对于“KUKA操作”的详尽介绍。
希望该文档能够帮助用户正确地理解和使用KUKA。
如有任何疑问或需要进一步的帮助,请参考附件中提供的“快速入门指南”或查阅术语表。
电机轴承更换操作流程
电机轴承更换操作流程 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT电机轴承更换操作流程一、检查确定电机轴承需更换的原因:1)轴承过热;?2)电机振动过大;3)轴承异响。
二、备材料及工用具1、备材料:已安装好转换开关、螺旋熔断器、接触器、热继电器、按钮、端子排等,并已接好主电路控制板,导线?RV~?mm?、?mm?四芯橡胶线各若干米,垫木?1?块、汽油、润滑脂、棉纱各若干?、毛?垫木?、汽油、润滑脂、棉纱各若干,、毛刷?1?把,油盘?1?个,油盘。
2、备工具:电工钳、电工刀、一字螺丝刀、十字螺丝刀、锤子、木锤、扁铲各?1?把、三爪拉拔器一个、?三爪拉拔器一个、?绝缘电阻表、?钢(铁)管(φ100?mm)1?个、记号笔?1?只,绝缘电阻表、万用表各?1?块。
?绝缘电阻表三、电机拆卸1、拆卸皮带轮或联轴器,先在轴承端(或联轴端)做好尺寸标记,松脱皮带轮或联轴器上的定位螺钉或销子,再用专用工具慢慢拉下带轮或联轴器2、拆卸风扇罩和风扇。
松开夹紧螺栓,轻轻敲打拆下;3、拆卸电动机一端的轴承外盖和端盖。
先在机座与端盖接缝处做好标记(以便安装复原时对准)。
拆下轴承外盖,松开并拧下端盖的紧固螺钉,轻轻敲打端盖四周(垫上垫木),使其与机座脱离,以便取下;?4、另一端的端盖与机座做好标记,拆下端盖上的紧固螺栓,敲打端盖,使之与机座分离(垫上垫木),?用手将端盖和转子从定子中抽出,抽出转子时要小心,不要擦伤定子绕组。
5、将与转子相联的轴承盖紧固螺栓拆下,把轴承盖和端盖逐个从轴上拆除四、轴承更换,电机组装1、更换轴承时,用专用工具拆卸,对于轴承留在端盖内的情况,可把端盖止口向上,平稳地架在两块铁板上,垫上一段直径小于轴径的金属管敲打,使轴承外圈受力,将轴承敲出;安装时要把标志的一面朝外2、对定、转子进行清扫,用皮老虎或压缩空气吹净灰尘后,用毛刷清扫干净;3、轴承清洗干净,滑动灵活;加入的新润滑脂一般以轴承室容积的?1/3~1/2?为宜?4、电动机组装时,步骤、方法正确,组装步骤与拆卸步骤顺序相反;五、绝缘测试1、工具的选用及核验:选用500V绝缘电阻表,使用前应对绝缘电阻表进行检查,方法是在“L”和“E”端开路情况下,摇动手柄,使转速达120r/min,指针应指向“∞”。
电动机更换滚动轴承及找正作业指导书

电动机更换滚动轴承作业指导书目录1、总则2、检修内容及技术要求3、质量控制4、试车与验收1、总则1.1主题内容:本专业指导书规定了电动机更换滚动轴承的检修内容及技术要求、质量控制、试车与验收。
1.2适用范围:本作业指导书适用于XXXX电动机更换滚动轴承1.3编写修订依据《GB/T 21205-2007 旋转电机整修规范》2、检修内容及技术要求2.1.1 拆卸轴承应选用适宜的专用拉具,当轴承内圈与轴颈配合较紧时,可用90°左右的机油浇于轴承内圈上。
2.1.2在轴承拆卸前,应将轴承用清洗剂清洗干净,检查它是否损坏。
检查时,用手旋转外套,观察其转动是否灵活,观察滚到、保持架及滚动体表面有无锈蚀、斑痕、变色,保持架的铆钉是否松动,检查轴承间隙是否超出规定值。
出现上列情况,轴承必须更换。
2.2轴承组装2.2.1 轴承组装前,检查轴承内圈与轴颈、轴承外圈与轴承孔的配合关系,不能出现跑内圈或跑外圈现象。
2.2.2轴承安装一般采用加热法,且最高温度不能超过100°。
主意,轴承润滑脂要在轴承装在轴上冷却后加注。
2.2.3 轴承安装后,轴承内圈端面必须紧靠轴肩端面,不应留有任何空隙。
可在轴承冷却过程中,用小锤通过垫子轻敲轴承内圈使其靠紧。
安装过程中,必须保证轴承的洁净。
轴承安装后,用手转动轴承应轻快灵活无任何阻碍的旋转。
2.2.4轴承外圈安装时,必须保证和电机端盖的内孔同心,不得有任何轻微的歪扭现象。
可用卡尺测量轴承外圈端面与轴承孔外端面的各处高度差是否均匀。
2.2.5轴承安装外圈或者内圈时,需要将轴承打入时,不得通过滚动体传力。
2.2.6前后轴承安装完毕后,电机盘车应该轻松自如。
2.2.7滚动轴承加入润滑脂应适量,标准见表一,同一轴承内部不得加入不同的润滑脂。
表1轴承脂加入量2.3轴颈的测量2.3.1测量前后主轴颈的轴颈尺寸。
2.3.2测量前后主轴颈的圆度,圆度为轴颈的0.25‰,最大值不超过0.025mm,且轴颈表面应无伤痕。
汽车厂检测线四轮定位更换滚筒电机sop操作指导书样板
汽车厂检测线四轮定位更换滚筒电机sop操作指导书样板
自动汽车行业的发展是近年来的热点,汽车厂中的检测线发挥了重要的作用。
为保证汽车检测线运行的顺利,滚筒电机更换操作必不可少。
本文将就如何用最安全、高效的方式来更换滚筒电机,提供基本操作指导,希望能够为汽车厂家带来实际价值。
滚筒电机更换操作要求安全第一,请在更换前检查安全设施及个人安全防护工具,包括穿上安全帽、穿上手套、穿上隔音耳塞等,以确保更换的安全运行。
其次,请检查电机性能,包括外壳检查、内部检查和耐久性测试等,以确保更
换的滚筒电机节能、高效,持续有效运行。
接下来,请仔细移去原电机并安装新电机,并确保电机线路不被切断,定位处于正确位置。
最后,在更换完毕后要进行安全检查,检查电机和线路的连接是否稳定,运行
是否正常,备用零件也应确保充足备后。
完整的操作流程执行后,就可以得到一个更换的优秀的滚筒电机,并可以使汽车检测线运行更加稳定和高效。
由此可见,滚筒电机更换操作是十分重要的,必须在安全、正确的前提下进行,以便确保汽车检测线正常使用。
汽车厂家要认真尊重并遵守本操作指导,以达到理想的汽车检测线运行效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测试过程
第一步:开机
第二步:零点校正
信息 高效 落实
机器人柜开机,把机器 人打到七轴零点的预校 准位置。
把EMT连接到机器人上, 对机器人七轴零点进行 重新校正。
测试过程
第三步:手动试车
第四步:自动试车
信息 高效 落实
机器人手动打回原点进 行手动试车。先慢速进 行走轨迹以免发生碰撞。
手动试车没有问题后, 把机器人上自动进行试 车,上自动时速度也要 逐渐加上去。
信息 高效 落实
Karosseriebau T-C-PR-2
KUKA七轴电机更换指导书
信息 高效 落实
2013年06月06日
重点注意事项
重点关注
1、更换电机时注意轻拿轻放,防止损坏电机。
2、电机从减速器抽出或者装入减速器时要注意水平运动,防止电机和减速器 的花溅磨损。
3、新安装的电机的电源线插头方向可能和原来的插头后再进行电缆连接。
4、电机安装完毕后要进行力矩校验,防止力矩不够。
5、电机更换工作完成后要注意清理现场,防止废弃物或者工具遗留在现场卡 入机器人七轴轨道内。
6、更换完电机后,无论机器人零点丢失与否都要对七轴进行零点校正(一般 情况下更换完电机,机器人零点丢失,机器人要提示进行零点校正)。
7、所有工作完成后要进行手动试车,防止出现零点偏差而导致轨迹偏移。
信息 高效 落实
拆卸过程
第一步:关机
第二步:拆电缆
信息 高效 落实
把机器人打到合适位置 后,保存机器人零点数 据后关机。
拆下七轴电机的电源线 和编码器线。拆下后注 意保护电缆接头。
拆卸过程
第三步:拆卸螺栓
第四步:抽出电机
信息 高效 落实
用棘轮六角和加长杆把 电机上的4颗固定螺丝拆 除。
把电机从减速器里抽出。 抽时注意水平用力,防 止损坏电机。
安装过程
第一步:润滑电机转轴
第二步:紧固电机螺栓
信息 高效 落实
把新电机的花溅上涂抹 少许黄油,然后把电机 送入减速器中。
电机送入到位后紧固固 定螺丝,螺丝的力矩为 45NM。
安装过程
第三步:连接电缆
第四步:清理现场
信息 高效 落实
安装好电机电源线和电 机编码器线。
清理好现场的工具及杂 物,防止对现场机器人 轨道造成伤害。