微型陀螺仪
2024-微机械陀螺简述,微惯性技术

LOGO
1.2 微机械陀螺特点
MEMS陀螺仪是利用 coriolis 定理,将旋转物体的角速度转换成 和角速度成正比的直流电压信号,其核心部件通过掺杂技术、光刻技 术、腐蚀技术、LIGA技术、封装技术等批量生产的,它主要特点是
振动平板结构 振动梁结构 振动音叉结构 加速度计振动结构
振动平板结构 振动梁结构 振动音叉结构
按加工方式
体微机械加工 表征微机械加工 LIGA(光刻、电铸和注塑)
LOGO
1.3 微机械陀螺分类
按驱动方式
压电式 静电式 电磁式
微
机
按检测方式
压电检测 电容检测
械 陀
压阻式检测
螺
光学检测
分
隧道效应检测
类 闭环模式
4. 测量范围大,一些MEMS 陀螺仪测量范围可高达数千°/s
缺点: 目前,各种微机械陀螺的角速度测量精度相对较低,
漂移较大。
LOGO
1.3 微机械陀螺分类
按振动结构
微
机
械
陀
螺
分
按材料
类
旋转振动结构 线性振动结构
硅材料 非硅材料
振动盘结构陀螺 旋转盘结构陀螺
正交线振动结构 非正交线振动结构
单晶硅 多晶硅 石英 其它
速率陀螺
按工作模式
开环模式
速率积分陀螺
整角模式
LOGO
2、微机械陀螺根本原理
振动式微机械陀螺根本原理 柯氏加速度及柯氏力
LOGO
2.1 振动式微机械陀螺根本原理
MEMS陀螺仪原理

mems陀螺仪mems陀螺仪即硅微机电陀螺仪,绝大多数的MEMS陀螺仪依赖于相互正交的振动和转动引起的交变科里奥利力。
MEMS (Micro-Electro-Mechanical Systems)是指集机械元素、微型传感器、微型执行器以及信号处理和控制电路、接口电路、通信和电源于一体的完整微型机电系统。
目录•mems陀螺仪的原理•mems陀螺仪的特点•mems陀螺仪的构成•mems陀螺仪的选用•mems陀螺仪的安装mems陀螺仪的原理•MEMS 陀螺仪(gyroscope)的工作原理传统的陀螺仪主要是利用角动量守恒原理, 因此它主要是一个不停转动的物体, 它的转轴指向不随承载它的支架的旋转而变化.但是MEMS 陀螺仪(gyroscope)的工作原理不是这样的,因为要用微机械技术在硅片衬底上加工出一个可转动的结构可不是一件容易的事.MEMS 陀螺仪利用科里奥利力——旋转物体在有径向运动时所受到的切向力. 下面是导出科里奥利力的方法. 有力学知识的读者应该不难理解.在空间设立动态坐标系(图一).用以下方程计算加速度可以得到三项,分别来自径向加速,科里奥利加速度和向心加速度.如果物体在圆盘上没有径向运动,科里奥利力就不会产生.因此,在MEMS 陀螺仪的设计上,这个物体被驱动,不停地来回做径向运动或者震荡,与此对应的科里奥利力就是不停地在横向来回变化,并有可能使物体在横向作微小震荡,相位正好与驱动力差90 度.MEMS 陀螺仪通常有两个方向的可移动电容板.径向的电容板加震荡电压迫使物体作径向运动(有点象加速度计中的自测试模式) ,横向的电容板测量由于横向科里奥利运动带来的电容变化(就象加速度计测量加速度) .因为科里奥利力正比于角速度,所以由电容的变化可以计算出角速度.mems陀螺仪的特点•MEMS陀螺仪是利用coriolis 定理,将旋转物体的角速度转换成与角速度成正比的直流电压信号,其核心部件通过掺杂技术、光刻技术、腐蚀技术、LIGA技术、封装技术等批量生产的,它主要特点是1. 体积小、重量轻,其边长都小于1mm,器件核心的重量仅为1.2mg。
MEMS陀螺仪精讲
MEMS陀螺仪的分类
1.振动式微机械陀螺仪 振动式微机械陀螺仪利用单晶硅或多晶硅制成的振动质 量,在被基带动旋转时的哥氏效应感测角速度。
2.转子式微机械陀螺仪 转子式微机械陀螺仪的转子由多晶硅制成,采用静电悬 浮,并通过力短再平衡回路测出角速度。从功能看,转 子式微机械陀螺仪属于双轴速率陀螺仪或双轴角速率传 感器。 3.微机械加速度计陀螺仪 微机械加速度计陀螺仪是由参数匹配的两个微机械加速 度计做反向高频抖动 而构成的多功能惯性传感器,兼 有测量加速度和角速度的双重功能。
2、日前,意法半导体(ST)新推出13款单轴和双轴陀螺 仪。这种陀螺仪有以下值得关注的地方: ①这种全新高性能角运动传感器 可运用于手势控制的游戏机和遥 控指向产品、数字摄像机或数码 相机的图像稳定功能,以及GPS 导航辅助系统。 ②意法半导体的陀螺仪包括关断模式 (当整个器件完全关断时)和睡眠模式, 部分电路在睡眠模式下被关断,不但 大幅降低功耗,并可快速唤醒,使电 源开关更加智能化。 ③意法半导体的高性能MEMS陀螺仪 拥有抗机械应力,并改进了内部自 检功能,使客户在组装后可以验证 传感器功能,无需在测试过程中移 动电路板。
MEMS陀螺仪的应用发展史
1.MEMS陀螺仪的第一波应用是1990年代的汽车安 全系统
2.MEMS陀螺仪第二波应用是始于2000年的消费电 子产品 3.MEMS陀螺仪的第三波应用将开始出现在医疗、工 业器械等领域
MEMS陀螺仪的军事应用优势
在现今的世界格局中,战争以 信息化战争的对抗为主,重点 是发展精确制导武器,MEMS陀 螺仪在其中发挥了重要作用。
整合MEMS加速计和陀螺仪地磁的模块 正在进入廉价的电子玩具市场,传感 器模块提供的动作感应功能可实现互 动的游戏体验,还能让更小的儿童上 网分享快乐:孩子们很快就能够用自 然的动作玩这些玩具,不再使用按钮 或键盘一类的东西。
微机械陀螺仪

微机械陀螺仪主要有振动式微机械陀螺仪、转子式微机械陀螺仪、微机械加速度计陀螺仪三种:
(1)振动式微机械陀螺仪。
振动式微机械陀螺仪利用单晶硅或多晶硅制成的振动质量,在被基座带动旋转时的哥氏效应感测角速度。
多采用平面电极或是梳状电极静电驱动,并采用平板电容器进行检测。
其分类主要有6种:梳状驱动平板式振动陀螺仪、梳状驱动音叉式振动陀螺仪、电磁驱动音叉式振动陀螺仪、振环式陀螺仪、压电棒式振动陀螺仪、声表面波振动陀螺仪。
(2)转子式微机械陀螺仪。
转子式微机械陀螺仪的转子由多晶硅制成,采用静电悬浮,并通过力短再平衡回路测出角速度。
从功能看,转子式微机械陀螺仪属于双轴速率陀螺仪或双轴角速率传感器。
其分为双自由度陀螺仪,单自由度陀螺仪两种。
(3)微机械加速度计陀螺仪。
微机械加速度计陀螺仪是由参数匹配的两个微机械加速度计做反向高频抖动而构成的多功能惯性传感器,兼有测量加速度和角速度的双重功能。
其分类有两种:单芯片集成加速度计陀螺仪、单质量块加速度计陀螺仪
INS=Inertial Navigation System 惯性导航系统。
微机械陀螺工作原理
微机械陀螺工作原理
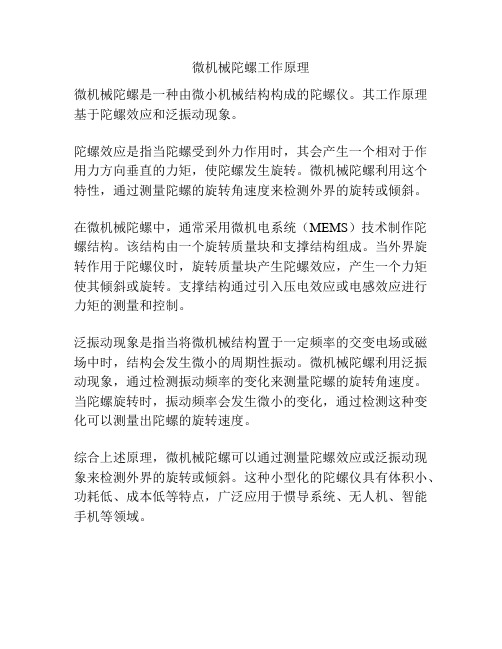
微机械陀螺是一种由微小机械结构构成的陀螺仪。
其工作原理基于陀螺效应和泛振动现象。
陀螺效应是指当陀螺受到外力作用时,其会产生一个相对于作用力方向垂直的力矩,使陀螺发生旋转。
微机械陀螺利用这个特性,通过测量陀螺的旋转角速度来检测外界的旋转或倾斜。
在微机械陀螺中,通常采用微机电系统(MEMS)技术制作陀螺结构。
该结构由一个旋转质量块和支撑结构组成。
当外界旋转作用于陀螺仪时,旋转质量块产生陀螺效应,产生一个力矩使其倾斜或旋转。
支撑结构通过引入压电效应或电感效应进行力矩的测量和控制。
泛振动现象是指当将微机械结构置于一定频率的交变电场或磁场中时,结构会发生微小的周期性振动。
微机械陀螺利用泛振动现象,通过检测振动频率的变化来测量陀螺的旋转角速度。
当陀螺旋转时,振动频率会发生微小的变化,通过检测这种变化可以测量出陀螺的旋转速度。
综合上述原理,微机械陀螺可以通过测量陀螺效应或泛振动现象来检测外界的旋转或倾斜。
这种小型化的陀螺仪具有体积小、功耗低、成本低等特点,广泛应用于惯导系统、无人机、智能手机等领域。
MEMS陀螺仪概况介绍

MEMS陀螺仪概况介绍MEMS陀螺仪是一种运用微机电系统(Micro-Electro-Mechanical System,MEMS)技术制造的陀螺仪。
MEMS陀螺仪的发展与传统机械陀螺仪相比,具有体积小、重量轻、功耗低、精度高、成本低等优势,因此在无线通信、导航定位、智能手机、游戏机、航空航天等领域得到了广泛的应用。
从原理上来说,MEMS陀螺仪是利用陀螺效应进行测量的。
根据陀螺效应,当陀螺体受到力矩作用时,会产生旋转运动,并随着陀螺体的旋转方向发生改变。
MEMS陀螺仪利用微加工技术制造出微小的陀螺体结构,通过测量陀螺体旋转的角速度来反映外界的力矩。
MEMS陀螺仪的核心部件是微机电系统传感器芯片。
该芯片由陀螺体、补偿机构和信号处理器组成。
陀螺体采用微机电技术制造,通常由微小的旋转结构和驱动电极组成。
补偿机构可以校正陀螺仪在使用过程中的误差,如温度漂移、震动干扰等。
信号处理器对传感器采集到的信号进行放大、滤波和数字化处理,最终输出测量结果。
MEMS陀螺仪主要应用于姿态控制、导航定位和惯性测量等领域。
在无人机、无线通信基站和汽车电子中,MEMS陀螺仪可以感知设备的姿态变化,并通过控制其他执行器实现稳定的定位和姿态控制。
在导航定位系统中,MEMS陀螺仪结合其他传感器如加速度计和磁力计,可以提供高精度的导航定位信息。
在惯性测量领域,MEMS陀螺仪可以用于测量物体的转动角速度,如飞行器的姿态角速度、旋转仪的角速度等。
然而,MEMS陀螺仪也存在一些挑战与局限性。
首先,由于微加工技术的限制,MEMS陀螺仪的测量范围和分辨率相对较小。
其次,由于设备内部结构的微小化,MEMS陀螺仪对温度变化和震动的敏感度较高,容易产生误差。
此外,MEMS陀螺仪在长时间运行过程中,由于不可避免的温度漂移和机械疲劳等因素,测量精度也会逐渐下降。
为了克服这些局限性,研究人员提出了一系列改进措施。
例如,通过增加补偿机构和算法优化,可以有效降低温度漂移和震动干扰对MEMS陀螺仪测量精度的影响。
mems 陀螺仪的静电驱动原理
《MEMS陀螺仪的静电驱动原理》1. 引言MEMS(Micro-Electro-Mechanical Systems)技术的发展,使得微型化的陀螺仪得以实现,成为现代导航系统中不可或缺的一部分。
而MEMS陀螺仪的静电驱动原理,则是其实现高精度测量的关键之一。
2. MEMS陀螺仪的基本原理与结构在深入探讨MEMS陀螺仪的静电驱动原理之前,我们首先来了解其基本原理与结构。
MEMS陀螺仪基本由感应器和驱动器两部分组成。
感应器用于检测角速度,而驱动器则用于施加力以抵消外部旋转引起的惯性力,从而实现测量。
3. MEMS陀螺仪的静电驱动原理在MEMS陀螺仪中,静电驱动原理是常见的驱动方式之一。
其基本原理是利用静电力来驱动微型结构进行振动。
静电力是由电荷间的静电相互作用所产生的力,在MEMS中通过改变电荷分布以施加力,并通过这种方式来驱动微型结构。
4. MEMS陀螺仪的静电驱动原理实现具体而言,MEMS陀螺仪的静电驱动原理是通过改变电场来产生静电力,从而驱动微型结构振动。
通常采用的方法是通过应用电压来改变微型结构上的电荷分布,从而产生静电力,使微型结构产生振动。
这种静电驱动原理可以实现对微型结构的精确控制,从而确保陀螺仪的测量精度和稳定性。
5. MEMS陀螺仪的静电驱动原理在导航系统中的应用MEMS陀螺仪的静电驱动原理在导航系统中有着广泛的应用。
其高精度的测量能力和稳定性,使其成为航空航天、无人车辆和智能手机等领域中的重要组成部分。
静电驱动原理的应用使得MEMS陀螺仪能够实现微小结构的高精度控制,从而为导航系统提供了可靠的测量数据。
6. 总结与展望通过对MEMS陀螺仪的静电驱动原理的深入探讨,我们可以更加深入地理解其在导航系统中的重要作用。
静电驱动原理的应用使得MEMS陀螺仪能够实现高精度的角速度测量,为现代导航系统的发展提供了强大的支持。
未来随着MEMS技术的不断发展,相信MEMS陀螺仪的静电驱动原理也将迎来更多的创新与应用。
微机电陀螺仪原理

微机电陀螺仪原理微机电陀螺仪是一种基于微机电系统技术的传感器,用于测量和检测物体的角速度和角位移。
它利用了微机电系统中的微小机械结构和运动原理,具有高精度、高灵敏度、低功耗等特点。
微机电陀螺仪的工作原理是基于角动量守恒定律和回转稳定原理。
当物体发生旋转时,其角动量会发生变化,微机电陀螺仪通过测量这种变化来得到角速度和角位移的信息。
微机电陀螺仪的核心部件是一对微机电陀螺仪感应器。
这些感应器通常由一些微小的机械结构组成,如微型悬臂梁或微型挠性结构。
当物体发生旋转时,这些微小的机械结构会受到惯性力的作用,产生微小的变形。
微机电陀螺仪通过测量这种微小的变形来判断物体的旋转情况。
微机电陀螺仪通常采用差动运动的方式进行工作。
它包括两个相互垂直的感应器,分别用于测量物体绕两个垂直轴的旋转情况。
当物体绕其中一个轴旋转时,感应器之间会产生微小的差异,微机电陀螺仪通过测量这种差异来计算物体的角速度和角位移。
微机电陀螺仪通常还会配备一些辅助装置,如放大器、滤波器和数据处理器等。
放大器用于放大感应器输出的微小信号,滤波器用于滤除噪声和干扰信号,数据处理器用于对测量结果进行处理和分析。
这些辅助装置可以提高微机电陀螺仪的性能和稳定性。
微机电陀螺仪在许多领域都有广泛的应用。
在航空航天领域,微机电陀螺仪可以用于导航、姿态控制和飞行稳定等方面。
在汽车领域,微机电陀螺仪可以用于车辆稳定控制和动态平衡等方面。
在工业生产中,微机电陀螺仪可以用于机器人控制和精确定位等方面。
微机电陀螺仪是一种基于微机电系统技术的传感器,用于测量和检测物体的角速度和角位移。
它通过测量微小的机械结构变形来获取旋转信息,并通过差动运动方式进行工作。
微机电陀螺仪具有高精度、高灵敏度和低功耗等特点,广泛应用于航空航天、汽车和工业等领域。
微机电陀螺仪原理
微机电陀螺仪原理引言:微机电陀螺仪是一种基于微机电系统(MEMS)技术的传感器,用于测量和检测物体的角速度和角度变化。
它广泛应用于导航系统、无人机、稳定平台等领域。
本文将介绍微机电陀螺仪的原理,以及其在实际应用中的一些特点和挑战。
一、微机电陀螺仪的原理微机电陀螺仪的原理基于陀螺效应,即当物体自转时,会产生一个与自转轴垂直的力矩,使得物体保持平衡。
具体而言,微机电陀螺仪利用微小的谐振器件来检测物体的角速度和角度变化。
当物体发生旋转时,谐振器件会受到力矩作用而发生微小的位移,通过测量这种位移,可以得到物体的角速度和角度信息。
二、微机电陀螺仪的工作原理微机电陀螺仪通常由两个主要部分组成:驱动部分和感应部分。
驱动部分负责提供激励信号,以使陀螺仪开始振动;感应部分则用于检测陀螺仪的振动情况并将其转换为电信号。
1. 驱动部分驱动部分通常采用压电材料或电磁驱动器来激励陀螺仪振动。
压电材料在施加电场时会产生机械应变,从而使得陀螺仪振动。
电磁驱动器则通过电流产生磁场,与陀螺仪中的磁场相互作用,从而实现驱动。
2. 感应部分感应部分是微机电陀螺仪的核心组成部分,它通过测量陀螺仪振动引起的位移来获取角速度和角度信息。
常见的感应部分包括电容传感器和压阻传感器。
电容传感器通过测量电容的变化来检测位移,而压阻传感器则通过测量阻值的变化来获得位移信息。
三、微机电陀螺仪的特点与挑战微机电陀螺仪具有许多优点,例如体积小、重量轻、功耗低等。
然而,它也面临着一些挑战。
1. 噪声和漂移微机电陀螺仪在实际应用中容易受到噪声和漂移的影响,这会导致测量结果的不准确性。
为了解决这个问题,可以采用信号处理技术和校准方法来降低噪声和漂移对测量结果的影响。
2. 温度影响温度对微机电陀螺仪的性能有很大影响,尤其是对其精度和稳定性。
为了解决这个问题,可以采用温度补偿技术来消除温度引起的误差。
3. 复杂环境下的应用微机电陀螺仪在复杂环境下的应用可能会受到振动、冲击和磁场等干扰。
微陀螺介绍
介 质 类
可根 分据 为工 作 方 式 的 不 同 ,
振动式微机电陀螺
• 当前微机电陀螺的主流 • 硅微陀螺仪
• 优点:结构简单、制作容易 • 缺点:温度特性较差、 结构与电路无法一体化制作、 各种噪声及振动的非线性、 加工工艺局限
按驱动方式 电容驱动 电磁驱动 电压驱动 按检测方式 电容检测 电流检测 频率检测 电阻检测 压电检测
微机电陀螺仪的结构
• 一般的 MEMS陀螺仪由梳子结构的驱动部分和电 容板形状的传感部分组成。有的设计还带有去驱 动和传感耦合的结构。
梳子结构的驱动部分
电容板形状的传感部分
带有去驱动和传感耦合的结构
微机电振动式陀螺动力学
• 陀螺的完整系动力学方程可由广义坐标系 下的基本形式拉格朗日方程描述 d T T qi i x dt x
APKWS制导火箭弹
微机电陀螺在军事上的运用
(2)代替现有中近程战术导弹中的陀螺仪, 降低导弹成本, 提高精确打击武器的装备 量与战斗力。
微机电陀螺在军事上的运用
例如:AIS 公司研制的SiRRS 系列微机电陀螺及惯性测量 组合 SiIMU 在英国“海狼” 舰载防空导弹和 NLAW 反坦克 导弹等武器装备上得到应用
微机电陀螺仪介绍
学 生:陆煜桦 学 号:201521080111 指 导 老 师 :黎业飞
本文贡献
• 分析微机电陀螺仪的工作原理、科里奥利力原理、 介绍微机电陀螺仪结构以及动力学、介绍了微机 电陀螺仪现代应用(重点军事上运用)及研究发 展趋势。国外微陀螺技术发展迅猛,目前达到的 性能指标已经远远超过最初对微陀螺性能的预计 值。但随着研究的深入和应用需求的扩展,对微 机电陀螺提出了低成本、高精度和高过载、高动 态等要求。需要在结构、工艺、组装及温控和信 号处理等方面不断创新和改进。
小学科学实验制作简易陀螺仪

陀螺仪的未来发展前景
陀螺仪在航空航天领域的应用将更加广泛,为导航、姿态控制等提供更加精确的数据。
随着智能驾驶技术的发展,陀螺仪在汽车领域的应用将更加重要,为车辆的稳定性控 制和自动驾驶提供支持。
陀螺仪在机器人领域的应用将更加普及,为机器人的运动控制和导航提供更加智能化 的解决方案。
陀螺仪在虚拟现实和增强现实领域的应用将更加深入,为虚拟环境的稳定性和真实性 提供保障。
军事:陀螺仪可用 于导弹、火箭和战 斗机的导航和制导 系统。
汽车:陀螺仪可应 用于车辆稳定性控 制、自动驾驶和悬 挂系统。
机器人:陀螺仪可 以帮助机器人实现 自主导航和姿态控 制。
陀螺仪的局限性
精度限制:由 于制造工艺和 材料限制,陀 螺仪的精度会 受到一定影响。
温度影响:陀 螺仪的工作性 能受温度影响 较大,需要采 取相应的温度
小学科学实验制作简易陀螺仪
, a click to unlimited possibilities
汇报人:
目录
单击此处添加 目录项标题
陀螺仪的原理
制作简易陀螺 仪
陀螺仪的实验 应用
陀螺仪的拓展 知识
01
添加章节标题
02
陀螺仪的原理
陀螺仪的工作原理
陀螺仪的原理基于角动量守恒定 律,即旋转轴所指的方向在不受 外力影响时是不会改变的。
制作技巧
选择合适的材料:选用轻便、坚固且转动力强的材料,如塑料或木材。 设计合适的形状:陀螺仪的形状应尽量简单,以减少空气阻力,提高旋转稳定性。 确定合适的轴心:确保陀螺仪的轴心与旋转轴线重合,以提高旋转稳定性。 调整重心位置:通过调整陀螺仪的重心位置,可以改变其旋转速度和稳定性。
制作成功后的测试
音叉式微陀螺的工作原理

音叉式微陀螺的工作原理
音叉式微陀螺是一种常见的微型陀螺仪,它的工作原理基于震动传感器和陀螺效应。
音叉式微陀螺的结构包括两个相互垂直的音叉,每个音叉的末端都有一个质量块。
当陀螺仪受到旋转力矩时,两个音叉的振动频率会发生微小的差异。
当陀螺仪不受旋转力矩作用时,两个音叉的振动频率是相等的。
当陀螺仪受到旋转力矩作用时,陀螺会发生旋转,这会导致两个音叉振动频率的微小差异。
这个差异可以通过传感器检测到。
传感器一般采用压电传感器或光纤传感器。
压电传感器通过测量音叉振动产生的压电信号来检测音叉的振动频率差异。
光纤传感器则通过测量音叉振动产生的光信号来检测振动频率差异。
根据陀螺效应,当陀螺仪受到外部旋转力矩作用时,它会产生一个与旋转速度正比的陀螺力矩。
这个陀螺力矩会使陀螺产生一个与旋转速度方向垂直的角动量,使陀螺仪保持平衡。
通过测量音叉振动频率的差异,可以确定陀螺仪受到的旋转力矩的大小和方向。
因此,音叉式微陀螺可以用来测量和检测物体的旋转运动。
MEMS陀螺仪的简要介绍

MEMS陀螺仪的简要介绍MEMS陀螺仪(Micro-Electro-Mechanical System gyroscope)是一种基于微机电系统技术的陀螺仪,具有小尺寸、低功耗、高灵敏度等特点。
它广泛应用于无人机、手机、平衡车等设备中,用于测量角速度和方向。
首先,我们来看一下MEMS陀螺仪的性能参数。
主要包括灵敏度、测量范围、精确度和稳定性。
1.灵敏度:指陀螺仪对角速度变化的感知程度,通常以每秒多少度/秒来表示。
灵敏度越高,陀螺仪对角速度变化的检测越精准。
2.测量范围:指陀螺仪能够测量的角速度的最大值和最小值。
通常以度/秒为单位,在不同应用场景下需根据需求选择合适的测量范围。
3.精确度:指陀螺仪测量结果与真实值之间的偏差。
精确度越高,陀螺仪的测量结果越接近真实值。
4.稳定性:指陀螺仪在长时间使用过程中保持测量精度的能力。
稳定性包括零漂、温漂等参数,可通过校准等方法来提高。
1.姿态控制:MEMS陀螺仪被广泛应用于飞行器、导航设备等需要进行姿态控制的设备中。
通过测量角速度变化,可以帮助设备实时检测自身的姿态,从而进行调整和控制。
2.稳定平台:MEMS陀螺仪可以用于制作稳定平台,如相机防抖系统。
通过补偿相机的晃动,可以提高拍摄的稳定性和图像质量。
3.导航定位:MEMS陀螺仪可以与其他传感器(如加速度计、磁力计)结合使用,用于导航和定位应用。
通过测量角速度和加速度,可以估计设备的位置和方向。
4.虚拟现实和增强现实:MEMS陀螺仪可以用于虚拟现实和增强现实设备中,如头戴式显示器和手持设备。
通过检测用户头部的旋转动作,可以实现对虚拟场景的观察和交互。
5.运动追踪:MEMS陀螺仪可以用于运动追踪设备中,如运动手柄和运动传感器。
通过测量角速度和加速度,可以捕捉用户的运动,实现与设备的交互。
综上所述,MEMS陀螺仪是一种小尺寸、低功耗、高灵敏度的陀螺仪,广泛应用于姿态控制、稳定平台、导航定位、虚拟现实和运动追踪等领域。
关于微陀螺仪的原理及应用
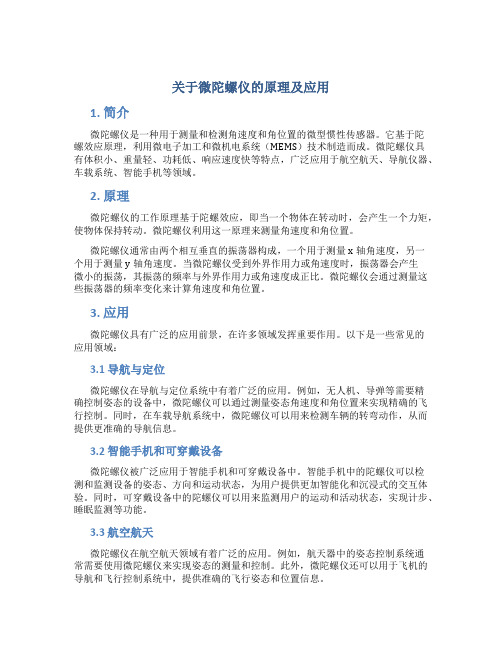
关于微陀螺仪的原理及应用1. 简介微陀螺仪是一种用于测量和检测角速度和角位置的微型惯性传感器。
它基于陀螺效应原理,利用微电子加工和微机电系统(MEMS)技术制造而成。
微陀螺仪具有体积小、重量轻、功耗低、响应速度快等特点,广泛应用于航空航天、导航仪器、车载系统、智能手机等领域。
2. 原理微陀螺仪的工作原理基于陀螺效应,即当一个物体在转动时,会产生一个力矩,使物体保持转动。
微陀螺仪利用这一原理来测量角速度和角位置。
微陀螺仪通常由两个相互垂直的振荡器构成,一个用于测量x轴角速度,另一个用于测量y轴角速度。
当微陀螺仪受到外界作用力或角速度时,振荡器会产生微小的振荡,其振荡的频率与外界作用力或角速度成正比。
微陀螺仪会通过测量这些振荡器的频率变化来计算角速度和角位置。
3. 应用微陀螺仪具有广泛的应用前景,在许多领域发挥重要作用。
以下是一些常见的应用领域:3.1 导航与定位微陀螺仪在导航与定位系统中有着广泛的应用。
例如,无人机、导弹等需要精确控制姿态的设备中,微陀螺仪可以通过测量姿态角速度和角位置来实现精确的飞行控制。
同时,在车载导航系统中,微陀螺仪可以用来检测车辆的转弯动作,从而提供更准确的导航信息。
3.2 智能手机和可穿戴设备微陀螺仪被广泛应用于智能手机和可穿戴设备中。
智能手机中的陀螺仪可以检测和监测设备的姿态、方向和运动状态,为用户提供更加智能化和沉浸式的交互体验。
同时,可穿戴设备中的陀螺仪可以用来监测用户的运动和活动状态,实现计步、睡眠监测等功能。
3.3 航空航天微陀螺仪在航空航天领域有着广泛的应用。
例如,航天器中的姿态控制系统通常需要使用微陀螺仪来实现姿态的测量和控制。
此外,微陀螺仪还可以用于飞机的导航和飞行控制系统中,提供准确的飞行姿态和位置信息。
3.4 其他领域除了上述应用领域之外,微陀螺仪还被应用于许多其他领域。
例如,在运动仪器中,微陀螺仪可以检测运动设备的角速度和角位置,为用户提供准确的运动数据。
mems陀螺仪用途

mems陀螺仪用途一、引言mems陀螺仪是指利用微机电系统技术制作的小型化陀螺仪,具有体积小、功耗低、精度高等优点。
它被广泛应用于航空航天、导航定位、智能手机、虚拟现实等领域。
本文将探讨mems陀螺仪的几个主要用途,并对其技术特点进行介绍。
二、航空航天领域1. 飞行器导航:mems陀螺仪可以根据飞行器的姿态变化来实时测量飞行器的转动角速度和角度,从而实现飞行器的导航和定位。
通过将多个mems陀螺仪组合使用,可以提高导航的精度和可靠性。
2. 姿态控制:在航天器的姿态控制系统中,mems陀螺仪可以测量航天器的姿态变化,并通过反馈控制算法对航天器进行精确的姿态控制。
这对于航天器的稳定运行和任务的完成至关重要。
三、导航定位领域1. 惯性导航:mems陀螺仪可以用于惯性导航系统中,通过测量移动物体的加速度和角速度,结合导航算法,实现对物体位置和方向的估计。
这种方式适用于室内导航、无线定位和车辆导航等场景,可以提供高精度的定位服务。
2. 自动驾驶:mems陀螺仪是自动驾驶系统中的重要组成部分,可以实时测量车辆的角速度和姿态,为车辆的精确控制提供数据支持。
通过与其他传感器(如加速度计、磁力计)的组合使用,可以实现车辆的智能导航和行驶。
四、智能手机领域1. 图像稳定:mems陀螺仪可以用于智能手机的图像稳定功能,通过实时测量手机的旋转角速度和角度,对图像进行实时校正,提高拍摄照片和录制视频的稳定性。
这对于提升用户体验和拍摄质量非常重要。
2. 屏幕旋转:mems陀螺仪还可以用于智能手机屏幕的自动旋转功能。
通过实时测量手机的姿态变化,可以自动调整屏幕的显示方向,提供更加便捷的使用体验。
五、虚拟现实领域1. 姿态跟踪:mems陀螺仪可以用于虚拟现实设备的姿态跟踪,通过实时测量用户头部的旋转角速度和角度,实现对虚拟现实场景的实时响应,提高虚拟现实体验的沉浸感。
2. 手柄控制:mems陀螺仪还可以应用于虚拟现实手柄的运动控制。
MEMS 3轴陀螺仪
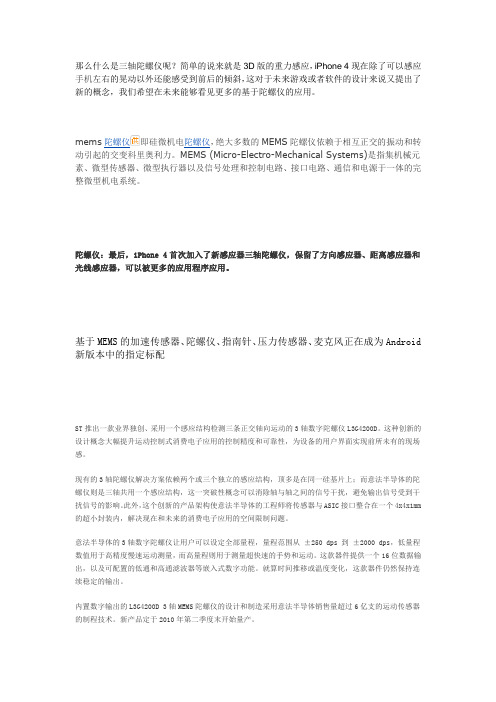
那么什么是三轴陀螺仪呢?简单的说来就是3D版的重力感应,iPhone 4现在除了可以感应手机左右的晃动以外还能感受到前后的倾斜,这对于未来游戏或者软件的设计来说又提出了新的概念,我们希望在未来能够看见更多的基于陀螺仪的应用。
mems陀螺仪即硅微机电陀螺仪,绝大多数的MEMS陀螺仪依赖于相互正交的振动和转动引起的交变科里奥利力。
MEMS (Micro-Electro-Mechanical Systems)是指集机械元素、微型传感器、微型执行器以及信号处理和控制电路、接口电路、通信和电源于一体的完整微型机电系统。
陀螺仪:最后,iPhone 4首次加入了新感应器三轴陀螺仪,保留了方向感应器、距离感应器和光线感应器,可以被更多的应用程序应用。
基于MEMS的加速传感器、陀螺仪、指南针、压力传感器、麦克风正在成为Android 新版本中的指定标配ST推出一款业界独创、采用一个感应结构检测三条正交轴向运动的3轴数字陀螺仪L3G4200D。
这种创新的设计概念大幅提升运动控制式消费电子应用的控制精度和可靠性,为设备的用户界面实现前所未有的现场感。
现有的3轴陀螺仪解决方案依赖两个或三个独立的感应结构,顶多是在同一硅基片上;而意法半导体的陀螺仪则是三轴共用一个感应结构,这一突破性概念可以消除轴与轴之间的信号干扰,避免输出信号受到干扰信号的影响。
此外,这个创新的产品架构使意法半导体的工程师将传感器与ASIC接口整合在一个4x4x1mm 的超小封装内,解决现在和未来的消费电子应用的空间限制问题。
意法半导体的3轴数字陀螺仪让用户可以设定全部量程,量程范围从±250 dps 到±2000 dps,低量程数值用于高精度慢速运动测量,而高量程则用于测量超快速的手势和运动。
这款器件提供一个16位数据输出,以及可配置的低通和高通滤波器等嵌入式数字功能。
就算时间推移或温度变化,这款器件仍然保持连续稳定的输出。
内置数字输出的L3G4200D 3轴MEMS陀螺仪的设计和制造采用意法半导体销售量超过6亿支的运动传感器的制程技术。
MEMS陀螺仪介绍

MEMS陀螺仪介绍MEMS陀螺仪(Micro-electromechanical system gyroscope)是一种利用微机电系统技术制造的陀螺仪。
它是一种测量角速度或角位移的传感器。
MEMS陀螺仪在航空航天、导航、惯性导航、虚拟现实、机器人和消费电子等领域中发挥着重要的作用。
本文将介绍MEMS陀螺仪的工作原理、分类、应用领域以及未来发展方向。
一、工作原理MEMS陀螺仪的关键部分是MEMS振动结构,它包括一个振动质量块和与之相连的弹性支撑结构。
当旋转速度发生变化时,质量块会感受到科氏力产生的偏移力,从而引起振动结构的振动变化。
通过测量振动结构的变化,可以得到旋转速度的信息。
二、分类根据工作原理的不同,MEMS陀螺仪可以分为容积扩散器陀螺仪、震动陀螺仪和光纤陀螺仪。
容积扩散器陀螺仪基于压电效应,通过测量振动微结构的容积变化来测量旋转速度。
震动陀螺仪则通过测量加速度和角位移之间的关系来得到旋转速度。
光纤陀螺仪则利用光的干涉效应来测量角速度。
容积扩散器陀螺仪是目前应用较广泛的MEMS陀螺仪,其精度和灵敏度较高。
震动陀螺仪是一种新兴的技术,具有体积小、功耗低等优势,逐渐被广泛应用。
三、应用领域1.导航和惯性测量单元:MEMS陀螺仪可以用于航空航天、导航和惯性测量单元中,用于测量飞行器的姿态和角速度,为导航和控制提供准确的数据。
2.虚拟现实和游戏:MEMS陀螺仪可以用于虚拟现实头盔和游戏手柄中,用于感知用户的头部运动和手柄的姿态变化,实现交互的沉浸式体验。
3.移动设备:MEMS陀螺仪也被广泛应用于手机、平板电脑和智能手表等移动设备中,用于实现屏幕旋转、手势控制和陀螺仪导航等功能。
4.机器人和自动驾驶:MEMS陀螺仪可以用于机器人和自动驾驶车辆中,用于感知和控制机器人或车辆的姿态和运动状态,实现精确的导航和控制。
四、未来发展方向随着技术的不断进步,MEMS陀螺仪仍然具有很大的发展潜力。
未来的发展方向主要包括以下几个方面:1.提高精度和稳定性:MEMS陀螺仪目前的精度和稳定性还有改进的空间。
k8陀螺仪 参数

k8陀螺仪参数
摘要:
1.引言
2.K8 陀螺仪的尺寸和重量
3.K8 陀螺仪的灵敏度
4.K8 陀螺仪的零偏稳定性
5.K8 陀螺仪的角速度测量范围
6.K8 陀螺仪的电源电压和工作温度
7.总结
正文:
K8 陀螺仪是一种微机械陀螺仪,具有许多出色的参数。
首先,K8 陀螺仪的尺寸为8mm x 8mm x 3mm,非常小巧,可以轻松集成到各种设备中。
其重量仅为0.02 克,也非常轻巧,不会对设备造成额外负担。
K8 陀螺仪的灵敏度为0.01°/√Hz,可以准确测量角速度,适用于需要高精度角速度测量的应用。
此外,K8 陀螺仪的零偏稳定性为0.01°/小时,可以长时间保持稳定测量。
K8 陀螺仪的角速度测量范围为±2000°/秒,可以满足大多数角速度测量的需求。
同时,K8 陀螺仪的电源电压范围为2.5V 至5.5V,适用于不同电压要求的设备。
K8 陀螺仪的工作温度范围为-40°C 至+85°C,可以在各种环境下稳定工作。
这使得K8 陀螺仪成为各种应用的理想选择,如航空航天、汽车、工业
自动化和消费电子等领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
华中科技大学机械科学与工程学院2015-2016 年第1 学期课程报告考生姓名:潜世界考生学号:M201570372专业、班级:机硕1502 班课程名称:微纳制造技术基础授课教师:朱福龙课程成绩:考查日期:2015年11月摘要陀螺仪是一种能够敏感载体角度或角速度的惯性器件,在姿态控制和导航定位等领域有着非常重要的作用。
传统的机械陀螺仪由于体积大、成本高、不适合批量生产等因素制约了其在很多方面的应用。
在科技发展的推动以及市场需求的牵引下,陀螺仪正朝着高精度、高可靠性、微型化、多轴测量和多功能测量的方向发展。
随着MEMS 技术的发展,MEMS 微细加工工艺在惯性器件制作中的应用大大减小了陀螺仪的尺寸,降低了生产成本,使其能够在汽车、工业自动化、消费电子等领域得到更广泛的应用。
文章首先对陀螺仪做了简单的原理和功能介绍,阐述了当前微陀螺仪是非常具有前景的研究防线,并简单介绍了几种常见的微陀螺仪,然后对微陀螺仪的结构进行了简单的分析并且分析了微机械陀螺仪的设计及制造过程和工艺方法并对其中的技术难点进行了分析,也对加工陀螺仪必须的MEM工艺进行了概述,然后对微陀螺仪的前景及应用进行了进一步的探讨。
关键词:微机械陀螺仪、MEM技术、制造过程AbstractGyroscope is a kind of inertial device which can be sensitiveto the angle or angular velocity of the carrier, which is very important in attitude control and navigation. Because of the large volume, high cost and not suitable for mass production, thetraditional mechanical gyroscope has been used in many aspects.Driven by the development of science and technology and the demand of the market, the gyroscope is developing in the direction of high precision, high reliability, miniaturization, multi axis measurement and multi function measurement. With the development of MEMS technology, the application of MEMS micro machining technology in the fabrication of inertial device greatly reduces the size of the gyroscope, reduces the cost of production, and can be used in the fields of automobile, industrial automation, consumer electronics and other fields.Firstly, this paper introduces the principle and function ofthe gyroscope. The current research on the micro gyroscope is very promising, and some common micro gyroscope is introduced. Then the structure of the micro gyroscope is analyzed. The design and manufacturing process and process method are analyzed.Keywords:Micromechanical gyroscopes, MEMS technology, production process、微机械陀螺仪研究背景(一)概念简介微机械MEM 是英文Micro Electro Mechanical systems 的缩写,即微电子 机械系统。
微电子机械系统(MEMS )技术是建立在微米/纳米技术(micro/na no tech nology )基础上的21世纪前沿技术,是指对微米/纳米材料进 行设计、加工、制造、测量和控制的技术。
它可将机械构件、光学系统、驱动部 件、电控系统集成为一个整体单元的微型系统。
这种微电子机械系统不仅能够采 集、处理与发送信息或指令,还能够按照所获取的信息自主地或根据外部的指令 采取行动。
它用微电子技术和微加工技术(包括硅体微加工、硅表面微加工、LIGA 和晶片键合等技术)相结合的制造工艺,制造出各种性能优异、价格低廉、微型 化的传感器、执行器、驱动器和微系统。
(二) MEM 陀螺仪研究历史及发展现状20世纪60年代,GE 」用压电石英晶体换能器制造出一个金属振动梁结构的陀螺,随后美国沃尔森公司推出利用石英晶体作为振动体,金属电极激励和检 测的石英陀螺,但是当时工艺条件还较为落后,石英陀螺的尺寸还是比较大。
后来美国Draper (德雷珀)实验室、美国LITTON (利顿)公司、美国BEI (贝) 公司、美国HONEYWEL 霍尼韦尔)公司等推出双端石英音叉陀螺,掀起了微机 械陀螺仪的研究热潮,将微机械陀螺由实验室的研究推向大规模的实用化和商业化。
图2为微机械陀螺实物图。
BAE 公司 SiVSG Honeywell 公司 GG5200图2微机械陀螺实物图目前,国外主要有美国、日本、瑞典、法国等国家在开展微机械陀螺的研究,其中,美国、日本的研制水平最高,微机械陀螺的工艺比较成熟,结构也 比较多样,尺寸较小,目前已经广泛在汽车安全气囊、手机等电子设备、飞机 辅助导航、机器人、医学手术等民用领域和超音速战机、巡航导弹、无人侦察 机等军事领域进入实用化、产品化阶段。
我国关于微机械陀螺的研究始于 20世纪 80年代后期,目前从事微机械陀螺研究的主要有清华大学、国防科技大学、航天科技集团 704所等,并且国防科工BEI 公司 QRS11 BAE 公司 SilMU04委从1995年末开始便投入6000万以上的经费用于惯性器件的基础性研究,并且微机械陀螺技术已经纳入863计划之中。
尽管国内对微机械陀螺技术的研究有一定进步,但不可否认的是在微机械陀螺的工艺、尺寸、精度和稳定性方面,同国外已经商业化的陀螺产品相比还有一定的差距。
三)研究目的和意义随着微电子技术和微机械加工技术的发展及振动陀螺仪的出现,使人们制造出微小型惯性元器件的梦想成为了现实。
在微观尺寸生产领域制造技术革命性的发展,使得小型元器件的尺寸突破了一个又一个极限。
如扫描隧道显微镜,可以实现原子分辨率;电子束、离子束、X射线束制造技术,可以使器件的特征线宽做到100.250 埃:分子工程也与常规的平面工艺密切地结合起来。
由于这些技术及相关技术的不断发展,使微小型制造业推进到了微米/纳米的水平。
硅微型机械振动陀螺仪和硅微型加速度计等始于七十年代后期,而八十年代后期才真正发展起来。
八十年代后期发展起来的这类新型惯性元件就是随着硅微机械加工技术的进步而涌现出的新型产品。
它们具有一系列传统陀螺仪无法比拟的优点,主要表现在以下几个方面。
1.体积小、重量轻利用硅微机械加工技术制造的硅微型机械振动陀螺仪、加速度计等惯性元件可以放在一个非常小的芯片上。
尺寸可以是微米级的,而且重量也大幅降低。
例如1988年美国德雷柏实验室(Charles Stark Draper Lab研制的框架式硅微型角振动陀螺仪,其体积仅为600X300X 2.59 ^mo而由该实验室于1994年研制的MMISA和ASIC组成的三维微型惯性测量组合(micro inertial measurement unit,MIMU)的体积也仅有2X2X0.5cm3质量为5g。
据美国航空与宇航学会(AIAA)的一篇研究报告,用单晶硅片化学刻蚀方法,在一块4英寸的硅片上可以批量生产多达4000个独立的微型惯性仪表。
2.可靠性高硅微型惯性元件从结构上没有了高速旋转的转子。
它们的体积小、重量轻、成本低等特点,使得它们特别适合采用冗余配置方案。
另外它们可以采用集成化的形式,将惯性元件与电子线路集成在一个芯片上,这样可减少干扰,从而使得它的可靠性提高。
3.能承受恶劣环境条件由于硅材料的抗冲击能力强、硅微型惯性元件的结构简单等特点,使得它们具有承受恶劣环境条件的能力。
一般可承受10000g 加速度的冲击。
4.寿命长由于硅材料的抗冲击能力强,而且它们没有了高速旋转的转子使得其寿命大幅提高。
例如美国德雷拍实验室研制的框架式硅微角振动陀螺仪的使用寿命可达100000 小时。
5.可批量生产由于微电子技术和微机械加工技术的发展与进步,使得硅微型惯性元件的批量生产变得简单容易。
6.功耗低硅微型惯性元件的体积小、重量轻,且通常工作在真空状态下,使得它们所消耗的能量非常低,一般能耗在微瓦到微微瓦量级。
7.测量范围大传统的转子陀螺仪,需要较大的动量矩,所以测量范围受到许多因素的制约,而硅微型惯性元件就没有这方面的问题。
可以很容易地得到较大的测量范围。
8.子线路集成硅微型惯性元件可以采用硅微机械加工工艺和半导体集成电路工艺来制造。
这样可方便地将硅微型惯性元件和电子线路集成在一起。
9.成本低由于硅微型惯性元件采用硅微机械加工工艺和半导体集成电路工艺来制造,使得它们特别适合规模化生产和批量生产。
所以可大幅提高生产效率,降低单个元件的成本。
陀螺在任何环境下都具有自主导航的能力,因此自其问世以来,一直被广泛运用于航海、航空、航天、军事等领域。
、微机械陀螺仪原理与结构(一) MEM 陀螺仪基本原理微机械陀螺的基本原理是利用柯氏力进行能量的传递,将谐振器的一种振动模式激励到另一种振动模式,后一种振动模式的振幅与输入角速度的大小成正比, 通过测量振幅实现对角速度的测量。
柯氏加速度是动参系的转动与动点相对动参系运动相互耦合引起的加速度。
则进行判断。
出,质点将在转盘上不停地沿垂直于简谐振动方向和转盘角速度两方向垂直的第 三方向振动,利用这一原理就可制作出微机械陀螺 (右图为电磁驱动共振隧穿效 应检测的微机械陀螺结构)。
一种电磁驱动压阻检测式的MEM 陀螺仪驱动及检测原理 信号源 卜、 L Z 功率放大电路 W 电压/电流转化!〉陀螺柯氏加速度的方向垂直于角速度矢量和相对速度矢量。