单片机怎么跑系统
单片机系统开发流程

单片机系统开发流程1. 硬件设计硬件设计是单片机系统开发的第一步,它涉及到电路原理图设计、PCB布局和元器件选型等工作。
1.1 电路原理图设计根据项目需求,使用相应的EDA软件(如Altium Designer、Cadence等)进行电路原理图设计。
在设计过程中,需要注意以下几点: - 确定单片机型号和外部器件的连接方式,包括引脚定义和功能。
- 根据外设模块的要求进行接口设计,如LCD显示屏、按键、传感器等。
- 考虑电源管理电路,包括稳压器、滤波电容和保护电路等。
- 进行信号调试和仿真验证,确保原理图没有错误。
1.2 PCB布局根据电路原理图进行PCB布局设计。
在布局过程中,需要注意以下几点: - 根据外部器件的位置和尺寸进行布局安排,尽量减少信号线的长度和干扰。
- 分析信号线的走向和层次分配,在不同层次上布置不同类型的信号线(如时钟线、数据线、地线等)。
- 合理安排元器件的焊盘位置和间距,方便手工焊接或自动插件。
- 添加必要的电源和地平面,增强电磁兼容性(EMC)和信号完整性(SI)。
1.3 元器件选型根据项目需求和硬件设计要求,选择合适的元器件。
在选型过程中,需要注意以下几点: - 确定单片机型号,考虑处理器性能、存储容量、接口等因素。
- 根据外设模块的要求选择合适的器件,如LCD显示屏、按键、传感器等。
- 考虑元器件的可获得性、价格和可靠性等因素。
2. 软件开发软件开发是单片机系统开发的核心环节,它涉及到嵌入式软件编程和调试等工作。
2.1 嵌入式软件编程根据项目需求和硬件设计要求,选择合适的嵌入式开发平台(如Keil、IAR Embedded Workbench等),进行软件编程。
在编程过程中,需要注意以下几点:- 编写初始化代码,配置单片机的时钟源、引脚功能和外设模块等。
- 设计主程序框架,包括任务调度、中断处理和状态机控制等。
- 编写驱动程序,实现对外设模块的控制和数据交互。
51单片机操作系统的实现+源代码
51单片机操作系统开发中的问题与技巧附代码引言51系列单片机是美国Intel公司在1980年推出的高性能8位单片机,在我国的应用非常广泛。
目前,在软件设计中需要软件工程师从底层做起,在系统软件设计方面需要做大量的重复性劳动。
如果开发一套基于51系列单片机的操作系统,那么用户只需要编写各个任务的程序,不必同时将所有任务运行的各种情况记在心中,不但大大减少了程序编写的工作量,而且减少了出错的可能性。
1 开发平台的选择和论证开发平台的选择至关重要,因为有时它不光影响进度、产品质量、可维护性等一般问题,还涉及到方案的可实现性。
在本系统中,选择51系列单片机作为操作系统的运行平台有以下原因。
首先,51系列单片机应用非常广泛,一大批性能优越的51兼容单片机相继推出。
这里包括:低功耗、高速度和增强型的Philips公司的系列产品;完美地将Flash(非易失闪存技术)EEPROM与80C51内核结合起来的Atmel公司的系列产品;在抗干扰性能,电磁兼容和通信控制总线功能上独树一帜,其产品常用于工作环境恶劣场合的Siemens公司的系列产品以及一些其它公司的产品。
既然产品如此丰富,性能如此优越,那么在处理多任务并且对实时性要求严格的系统设计中,为了充分挖掘单片机的潜能(尤其是在实时性方面),也是为了简化开发的过程,基于51系列单片机的实时操作系统的需求就十分强烈了。
Keil公司的RTX51 Full就是一个基于51系列单片机的有实用价值的实时操作系统,但该操作系统是一个源码不公开的收费软件。
其次,借助于Keil C51的集成开发环境,完全可以开发出适用于51系列单片机的操作系统代码。
Keil C51软件提供丰富的库函数和功能强大的Windows界面集成开发调试工具。
另外重要的一点,Keil C51生成的目标代码效率非常高,多数语句生成的汇编代码很紧凑,容易理解。
在开发大型软件时,更能体现高级语言的优势。
C编译器能产生可重入代码,而且用C语言可以打开和关闭中断。
单片机中断系统
单片机中断系统一、单片机中断系统的概念单片机中断系统是指在程序运行过程中,由于出现特殊情况(如外部设备的输入信号、定时器溢出等),使得单片机暂时停止当前任务的执行,转而执行相应的中断服务程序(ISR),以处理中断事件。
中断处理完毕后,再返回到中断点继续执行原来的任务。
这种特殊的中断机制,使得单片机能够同时处理多个任务,实现了实时性较高的应用程序设计。
二、单片机中断系统的结构单片机中断系统主要由以下几个部分组成:1、中断源:产生中断的外部设备或内部定时器。
2、中断请求寄存器:用于存储各个中断源的中断请求状态。
3、中断优先级寄存器:用于确定多个中断源的优先级。
4、中断服务程序(ISR):用于处理中断事件,执行相应的操作。
5、中断返回:中断处理完毕后,返回原程序继续执行。
三、单片机中断系统的处理过程当单片机检测到某个中断源发出中断请求时,会暂停当前任务的执行,按照优先级顺序执行相应的中断服务程序(ISR)。
在ISR中,程序会读取中断源的中断请求状态,并对相应的中断源进行处理。
处理完毕后,程序会返回原程序继续执行。
如果此时还有其他的中断源发出中断请求,则根据优先级顺序再次执行相应的ISR。
四、单片机中断系统的应用单片机中断系统在实时控制、数据采集、通信等领域有着广泛的应用。
例如,在工业控制中,当某个传感器发出中断请求时,单片机可以暂停当前任务的执行,转而执行相应的中断服务程序(ISR),对传感器数据进行采集和处理。
处理完毕后,再返回原程序继续执行。
这样,单片机可以在不丢失任何数据的情况下,实时地响应外部设备的请求。
五、总结单片机中断系统是实现实时控制和数据处理的重要手段之一。
通过合理的配置和使用中断系统,可以提高单片机的实时性能和数据处理能力。
在实际应用中,需要根据具体的需求和硬件条件选择合适的单片机型号和中断系统配置方案,以满足系统的实时性和稳定性要求。
单片机的中断系统在嵌入式系统设计中,单片机因其体积小、性价比高、可靠性强等特性被广泛应用。
51单片机操作系统
嵌入式实时操作系统,可以充分的利用单片机的资源,提高CPU使用效率。
操作系统最主要就是实现任务的调度、管理。
同时对于实时操作系统来说响应时间很重要。
操作系统编写最主要就是用到了堆栈SP于RET指令。
这两个东西怎么用呢?其实在我们每次调用函数的时候都会自动将函数的断点地址(执行函数调用时的PC)压入到SP中,而从函数中返回时其实是利用RET指令将断点弹回到PC(程序指针)中。
所以利用堆栈和RET指令就可以实现简单的任务的切换。
这么说肯定挺模糊的,接下来一步一步解释。
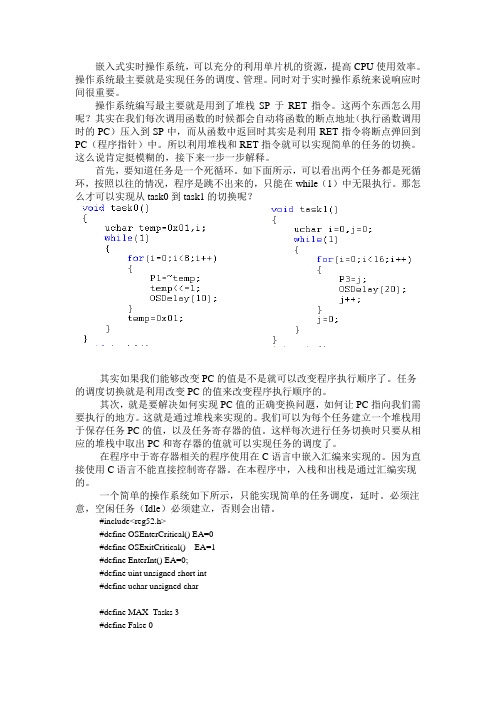
首先,要知道任务是一个死循环。
如下面所示,可以看出两个任务都是死循环,按照以往的情况,程序是跳不出来的,只能在while(1)中无限执行。
那怎么才可以实现从task0到task1的切换呢?其实如果我们能够改变PC的值是不是就可以改变程序执行顺序了。
任务的调度切换就是利用改变PC的值来改变程序执行顺序的。
其次,就是要解决如何实现PC值的正确变换问题,如何让PC指向我们需要执行的地方。
这就是通过堆栈来实现的。
我们可以为每个任务建立一个堆栈用于保存任务PC的值,以及任务寄存器的值。
这样每次进行任务切换时只要从相应的堆栈中取出PC和寄存器的值就可以实现任务的调度了。
在程序中于寄存器相关的程序使用在C语言中嵌入汇编来实现的。
因为直接使用C语言不能直接控制寄存器。
在本程序中,入栈和出栈是通过汇编实现的。
一个简单的操作系统如下所示,只能实现简单的任务调度,延时。
必须注意,空闲任务(Idle)必须建立,否则会出错。
#include<reg52.h>#define OSEnterCritical() EA=0#define OSExitCritical() EA=1#define EnterInt() EA=0;#define uint unsigned short int#define uchar unsigned char#define MAX_Tasks 3#define False 0#define Ture 1#define MaxPrio 2#define IdlePrio MaxPrio#define OS_Task_Create_Error 1#define OS_Delet_Task_Error 2#define OS_Delet_Task_Not_Exit 3#define OS_Resume_Idle_Error 4#define OS_Resume_Task_Error 5typedef struct{uchar OSStackTop; //SPuchar OSSuspend;uchar OSTCBDly; //delay time}OSTCB;uchar code OSMapTbl[8]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};OSTCB OSTCBTbl[MAX_Tasks];volatile uchar OSRdyTbl;volatile uchar OSIntNesting; //用于中断锁死volatile uchar OSSchNesting; //任务切换上锁volatile uchar OSRuning=False;volatile uchar OSStartStack[MAX_Tasks][20];volatile uchar OSPoint[MAX_Tasks][2];volatile uchar OSPrioCur;//volatile uchar OSTaskPend;OSInit(){// uchar i;EA=0;ET0=1;TMOD=0x01;TH0=0xB1;TL0=0xE0;OSRdyTbl=0;OSIntNesting=0;OSSchNesting=0;}//PCL,PCH,ACC ,B,DPL,DPH,PSW,R0-R7uchar *OSStackInit(uint task,uchar *ptr,uchar OSPrio){uchar* stk;stk=ptr;OSPoint[OSPrio][0]=task;OSPoint[OSPrio][1]=task>>8;*(stk++)= OSPoint[OSPrio][0];*(stk++)= OSPoint[OSPrio][1];*(stk++)= 0x00; //ACC*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk++)= 0x00;*(stk) = 0x00;return stk;}uchar OSTaskCreate(uint task,uchar *ptr,uchar OSPrio){uchar* psp;OSEnterCritical();if(OSPrio<=MaxPrio) //创建的任务优先级有效{psp=OSStackInit(task,ptr,OSPrio); //初始化堆栈OSRdyTbl|=OSMapTbl[OSPrio];OSTCBTbl[OSPrio].OSStackTop=psp;OSTCBTbl[OSPrio].OSSuspend=0;OSTCBTbl[OSPrio].OSTCBDly=0;}else{OSExitCritical();return OS_Task_Create_Error;}OSExitCritical();}/*===================================================== 任务调度函数入口参数:无函数说明:进入函数后,先进行堆栈保护,然后查找最高优先级任务运行======================================================*/void OSSchedule(){uchar i;OSEnterCritical();#pragma asmPUSH ACCPUSH BPUSH DPHPUSH DPLPUSH PSWPUSH 0PUSH 7PUSH 1PUSH 2PUSH 3PUSH 4PUSH 5PUSH 6#pragma endasmOSTCBTbl[OSPrioCur].OSStackTop=SP;if(OSRdyTbl) //如果就续表中有任务{for(i=0; i<MAX_Tasks;i++){if((OSRdyTbl & OSMapTbl[i])&&(!OSTCBTbl[i].OSSuspend)) //任务优先级最高且未被挂起{OSPrioCur=i;break;}}}SP=OSTCBTbl[OSPrioCur].OSStackTop;#pragma asmPOP 6;POP 5;POP 4;POP 3;POP 2;POP 1;POP 7;POP 0;POP PSW;POP DPL;POP DPH;POP B;POP ACC;#pragma endasmOSExitCritical();}void OSStart(){TR0=1;EA=1;while(1);}/*=========================================================延时若干个系统时钟入口参数:延时系统时间个数===========================================================*/ void OSDelay(uchar time){if(time==0)//延时为0,返回return;OSEnterCritical();OSTCBTbl[OSPrioCur].OSTCBDly=time;OSTCBTbl[OSPrioCur].OSSuspend=1;OSExitCritical();OSSchedule();}/*=========================================================任务删除函数入口参数:为被删除任务优先级函数说明:将任务从就绪表中删除===========================================================*/ uchar OSTaskDelet(uchar priority){OSEnterCritical();if(priority>=IdlePrio){OSExitCritical();return OS_Delet_Task_Error;}if(!(OSRdyTbl & OSMapTbl[priority])){OSExitCritical();return OS_Delet_Task_Not_Exit;}OSRdyTbl &= ~(OSMapTbl[priority]);OSExitCritical();if(priority<OSPrioCur){OSSchedule();}}/*=========================================================任务恢复函数入口参数:恢的任务优先级函数说明:恢复被OSTaskDelet()删除的任务===========================================================*/ uchar OSTaskResume(uchar priority){OSEnterCritical();if(priority==IdlePrio)//恢复的任务不能为空闲任务,为空闲任务返回错误标志{OSExitCritical();return OS_Resume_Idle_Error;}if((!(OSRdyTbl & OSMapTbl[priority])) && (priority>=0)){OSRdyTbl |= (OSMapTbl[priority]);}else //返回的任务不存在,返回错误标志{OSExitCritical();return OS_Resume_Task_Error;}OSExitCritical();if(priority<OSPrioCur){OSSchedule();}}/*=============================================================== 定时器0用于产生系统时钟,这里每过20ms中断一次。
单片机编程方法

单片机编程方法
单片机(MCU)编程涉及到使用特定的编程语言(如C或汇编)来编写指令,这些指令告诉单片机如何执行特定的任务。
以下是一些单片机编程的基本步骤和注意事项:
1. 选择编程语言:大多数单片机编程使用C语言,因为它易于理解且效率高。
汇编语言也可以使用,但更复杂。
2. 选择开发环境:你需要一个集成开发环境(IDE),如Keil、IAR Embedded Workbench 或 Visual Studio等,这些IDE可以编译你的代码并上传到单片机。
3. 了解单片机的架构和特性:每种单片机都有其自己的指令集、特性和外设。
你需要阅读单片机的数据手册和技术规范,以了解如何编程和使用其外设。
4. 编写代码:根据你的需求,开始编写代码。
这可能涉及到配置单片机的各种外设(如GPIO、UART、SPI、PWM等),以及编写主程序。
5. 编译代码:使用IDE编译你的代码。
如果代码有错误,IDE会提示你。
6. 调试代码:编译成功后,将程序下载到单片机中进行调试。
使用调试器查看程序的运行状态,找出并修正任何错误。
7. 优化代码:根据需要优化代码,以提高其执行效率或减小其占用的存储空间。
8. 测试和部署:在确认代码工作正常后,进行更广泛的测试,然后将其部署到实际应用中。
以上就是单片机编程的基本步骤。
需要注意的是,单片机编程需要对硬件和软件都有深入的理解,因此可能需要一定的学习和实践才能掌握。
第2章 单片机应用系统的开发过程

2.2.2 单片机的选型
□智能卡接口的单片机。例如:AT83C5121、AT83C5122、AT83C5123、 AT83C5127、AT85C5121、AT85C5122、AT89C5121等。 □ MP3 专 用 单 片 机 。 例 如 : AT85C51SND3 、 AT89C51SND2C 、 AT89C51SND1C、AT83SND2C、AT83SND1C。
2.2.1 系统分析
首先,要保证设计要求可以利用现有的技术来实现。一般可以通过 查找相关文献、寻找类似设计等方法找到与该任务相关的设计方案。这 样可以参考这些相关的设计,分析该项目是否可行以及如何实现。如果 设计的是一个全新的项目,则需要了解该项目的功能需求、体积和功耗 等,同时需要对当前的技术条件和器件性能非常熟悉,以确保合适的器 件能够完成所有的功能。
2.2.2 单片机的选型
3.Infineon单片机介绍 Infineon公司的产品包括标准的8051内核以及符合工业标准的8051 单片机,主要包括XC800系列和C500/C800系列。其中,新型的XC800系列 单片机采用高性能8051内核、片上集成闪存和ROM存储器以及功能强大的 外 设 组 , 如 增 强 型 CAPCOM6(CC6) 、 CAN 、 LIN 和 10 位 ADC , 包 括 XC886/888CLM、XC886/888LM、XC866等。 C500/C800系列单片机是基于工业标准8051架构的微处理器,具有 CAN、SPI等资源,包括C515C、C505CA、C868等。
2.2.2 单片机的选型
4.Silicon单片机介绍 Silicon Laboratories公司的C8051F系列单片机,集成了一流的模 拟功能、Flash、JTAG的调试功能最高可达100MIPS的8051 CPU以及系统 内现场可编程性。C8051F系列单片机有如下几类。 □USB混合信号微处理器。例如C8051F340、C8051F341、C8051F342、 C8051F343、C8051F344、C8051F345、C8051F320、C8051F321等。 □精密混合信号微处理器。例如C8051F120、C8051F121、C8051F130、 C8051F133、C8051F350、C8051F020、C8051F021、C8051F064等。 □CAN接口的混合信号微处理器。例如:C8051F040、C8051F041、 C8051F060、C8051F061、C8051F062、C8051F063等。
单片机指令系统及其执行过程的详解

单片机指令系统及其执行过程的详解单片机是现代电子设备中不可或缺的组成部分,其指令系统和执行过程对于单片机的工作和性能起着至关重要的作用。
本文将详细介绍单片机指令系统的组成和执行过程,并探讨其在实际应用中的意义。
一、单片机指令系统的组成单片机的指令系统由指令集、寄存器和地址计算单元组成。
1. 指令集指令集是单片机能够执行的所有指令的集合。
它包含了各种不同类型的指令,如算术指令、逻辑指令、数据传输指令等。
不同的单片机具有不同的指令集,但通常都包括基本的算术和逻辑运算指令,以及控制流指令(如条件分支和循环)。
2. 寄存器寄存器是单片机内部用于存储数据和执行运算的存储器组件。
常见的寄存器包括通用寄存器、标志寄存器、程序计数器等。
通用寄存器用于存储临时数据,标志寄存器用于存储运算结果的状态信息,程序计数器用于存储当前正在执行的指令地址。
3. 地址计算单元地址计算单元用于计算指令中的操作数的地址。
它根据指令中的寻址方式和地址模式,将指令中的操作数地址计算出来,并将其传递给存储器或寄存器。
二、单片机指令执行过程单片机的指令执行过程包括指令取指、指令译码和指令执行三个阶段。
1. 指令取指在指令取指阶段,程序计数器(PC)从存储器中读取下一条指令的地址,并将其存储在指令寄存器(IR)中。
同时,PC的值自动递增,准备读取下一条指令。
2. 指令译码在指令译码阶段,单片机将指令寄存器中的指令译码为对应的操作。
根据指令的类型和操作码,单片机确定需要执行的具体操作,如运算、数据传输或控制流操作。
3. 指令执行在指令执行阶段,单片机根据译码结果执行具体的操作。
这包括算术和逻辑运算、数据传输等。
执行结果可以存储在寄存器中,也可以写入存储器。
同时,单片机还会根据程序的控制流进行条件分支或循环。
三、单片机指令系统的应用意义单片机指令系统的优化对于提高单片机的执行效率和性能至关重要。
通过合理设计指令集,可以充分发挥单片机的计算和控制能力,提高其运算速度和响应能力。
PIC单片机的最小系统及开发流程

; 设置RA口为IO口 ;选择数据存储器的体0
第三讲 5. PIC单片机的集成开发环境MPLAB 编译失败的原因1-拼写错误 学会看Output窗口的信息
第三讲 5. PIC单片机的集成开发环境MPLAB 编译失败的原因2-用中文输入法输入“;”“,”
DIP封装的 PIC16F877A
SOIC和SSOP封 装的PIC单片机
TQFP封装的 PIC6F877A
更加详细的封装信息在datasheet里面
第三讲 3,PIC单片机的封装
•
小知识点 • 环氧树脂聚合物 成本低,重量 轻 欣赏下黑胶芯片的内部 • 光照(包括紫外线)会影响晶 体管的工作性能,所以外壳不 能透光。
第三讲 5. PIC单片机的集成开发环境MPLAB 软件安装详见课本P32, 3.3节 安装程序,下课学习委员来找我拷贝
可官方免费下 载,但只支持 汇编编译,C 语言编译的话 需要安装其他 C编译器,而 且不同信号的 编译器不同
MPLAB 8.8 IDE (本课程讲解用)
MPLAB X IDE (最新版本)
asm文件第三讲pic单片机的集成开发环境mplab软件安装详见课本p3233节安装程序下课学习委员来找我拷贝mplab88ide本课程讲解用mplabide最新版本可官方免费下载但只支持汇编编译c语言编译的话需要安装其他c编译器而且不同信号的编译器不同第三讲pic单片机的集成开发环境mplabmplabide提供以下功能
TQFP封装的 PIC6F877A
集 成 电 路 的 封 装 ( Package ) 指 厂 商 对 由 集 成 电 路 的 核 心 —— 半 导 体硅片的包装方式,也即 芯片的载体。
第三讲 4,PIC单片机的烧写流程
单片机开发流程

单片机开发流程单片机开发流程包括五个主要步骤:需求分析、系统设计、编码、调试与测试、部署与运维。
下面将详细介绍这五个步骤的具体内容。
1.需求分析需求分析是单片机开发的第一个步骤,也是最为关键的一步。
在这个阶段,开发者需要和客户或者用户进行沟通,了解清楚他们的需求和期望。
同时,还需要根据需求分析出系统的功能和性能指标,并将这些内容记录在文档中。
2.系统设计在需求分析之后,开发者需要从整体上设计系统。
系统设计也是关键的一步。
在这个步骤中,开发者需要考虑到系统的硬件和软件架构、端口和界面设计、输入输出等各个方面。
同时,还需要注意设计的可靠性、安全性和可扩展性。
3.编码在系统设计之后,开发者需要开始编写代码。
在这个阶段,开发者将目标系统的功能和性能指标转化为可执行的代码。
同时,需要注意代码的质量和可读性。
编程语言的选择和开发工具都非常重要。
4.调试与测试编写完成代码后,开发者需要对其进行调试和测试。
通过对代码的协调和分析,发现并解决代码中的潜在问题。
同时,需要进行全面性的测试,并将所有的问题记录在日志文件中。
这个过程非常关键,可减少开发之后解决问题的次数。
5.部署与运维在完成调试和测试之后,开发者最后要进行的事情是将系统部署到最终的使用环境中。
它可以是系统运行的硬件设备或运行在虚拟机中。
需要非常仔细地进行系统部署和配置。
随着在使用过程中出现问题,需要经过事后反思并进行持续优化。
综上所述,单片机开发的流程是一个相对比较复杂的过程。
除了专业知识外,开发者还需要注意细节、沟通和协作,才能顺利地完成项目。
同时也要注重代码、测试、部署等环节,以确保为客户和用户提供高质量的产品或解决方案。
基于AVR单片机的监测抢跑智能短跑计时系统

Value Engineering———————————————————————作者简介:马剑南(1989-),男,河北石家庄人,本科,研究方向为电气工程及其自动化。
1系统简介①利用红外避障传感器检测运动员的起跑;②传感器信号作为AVR 单片机外部中断源;③利用红外避障传感器检测运动员是否到达终点;④AVR 单片机控制LED 显示;⑤利用AVR 单片机的内部时钟与LED 显示模块结合产生显示成绩功能;⑥IAR Embedded Workbench IDE 开发环境的使用。
2创新性及应用虽然大型短跑比赛上已经采用了相当精确智能的计时系统,但在很多重要性一般的比赛中仍停留在人工计时的阶段,开发这样一套智能短跑计时系统,可以很好的完成计时工作,提高精确度,节省人力。
这套计时系统涵盖了单片机中的中断技术,计时器技术以及数码管的显示技术,对这个系统的研究将让我们有机会学到很多实用的技术。
作为电气专业的学生,做这样的一个项目有利于对单片机以及其他相关专业知识的学习,熟悉一个科研项目的开发过程,目的是得到锻炼和提高,对今后的就业有所帮助。
3实现原理3.1控制模块:EXP-Atmega128EXP -ATMEGA128适配器板是以ATMEL 公司的ATMEGA128为核心器件,配以外部11.0592MHZ 晶振的开发板。
为方便下载程序而提供的ISP 和JTAG 接口。
总线接口部分分为P1、P2、P3、P4。
电源模块LM1117-3.3将+5.0V 电源降压为+3.3V 。
+5.0V 电源为单片机提供电源,同时通过D1发光二极管指示。
研究红外避障传感器是怎样对运动员进行感应,并做出有效、准确识别的。
采取一定的软件编程和优质红外传感器套装实现红外传感器对队员的准确、无误的识别并且给系统Atmega128单片机核心控制块的CPU 发出信号,让CPU 采取相应的行动。
红外避障传感器是检测有无物体靠近的传感器,由红外发射管和红外接收管组成,工作时,红外发射管发射一束红外光线,当遇到物体时,可以反射回来,具体反射回来的红外光有多少,取决于物体的颜色和与发射管之间的距离。
单片机编程设计的学习方法和步骤6篇

单片机编程设计的学习方法和步骤6篇第1篇示例:单片机编程设计是现代电子技术领域中非常重要的一门技能。
通过学习单片机编程设计,我们可以掌握如何使用单片机来控制各种电子设备,实现不同的功能和项目。
下面将介绍一下关于单片机编程设计的学习方法和步骤,希望能够帮助大家更好地入门和掌握这门技能。
一、学习方法:1.系统学习:要系统地学习单片机编程设计,首先需要掌握单片机的基础知识,如单片机的结构、运行原理、常用的单片机种类等。
可以通过看书、网上视频、参加培训班等途径进行学习。
2.理论联系实际:学习单片机编程设计最重要的是理论联系实际,要通过实际的项目来巩固所学的知识。
可以选择一些简单的项目来实践,比如LED灯控制、按键控制等,逐步提高难度深入学习。
3.模仿学习:在学习单片机编程设计的过程中,可以借鉴一些经典的案例和代码,通过模仿学习来加深对编程的理解。
通过修改已有代码、理解其原理,逐步提高自己的编程能力。
4.多练习:学习单片机编程设计是一个需要不断练习的过程,只有通过多次实践才能掌握这门技能。
可以选择一些开源的项目来参与,多练习不断提高。
二、学习步骤:1.选择单片机:首先需要选择适合自己学习的单片机。
市面上常见的单片机有51单片机、AVR、ARM等,可以根据需求和学习难度选择适合的单片机。
2.学习编程语言:单片机编程设计通常使用C语言或汇编语言,因此需要学习相关的编程语言知识。
可以通过书籍、网课等途径学习,掌握基本的语法和使用方法。
3.搭建开发环境:学习单片机编程设计需要一个合适的开发环境,可以选择一款适合自己的编译软件和仿真软件。
常用的开发环境有Keil、AVR Studio等。
4.学习单片机的硬件连接和调试:在开始编程之前,需要学习单片机的硬件连接和调试方法。
掌握单片机的引脚功能、接线方法,通过示波器等工具进行调试,确保硬件正常连接。
5.编写代码实现功能:根据需求编写相应的代码,实现所需功能。
可以参考官方手册、资料、网上案例等来帮助编写代码,通过不断调试和修改,完善代码功能。
基于单片机的车辆自动驾驶系统设计
基于单片机的车辆自动驾驶系统设计车辆自动驾驶系统是现代汽车科技领域的热点研究和发展方向之一。
它利用先进的感知和控制技术,使车辆能够感知环境、做出决策并自主行驶。
在车辆自动驾驶系统中,单片机作为核心控制单元起着至关重要的作用。
本文将深入探讨基于单片机的车辆自动驾驶系统设计。
首先,我们需要了解什么是自动驾驶系统。
自动驾驶系统是一种利用多种传感器和先进的算法来感知、分析和决策,实现车辆自主行驶的系统。
其中,传感器主要用于采集车辆周围环境的信息,例如雷达、摄像头、激光雷达等。
算法则通过处理传感器数据,实现车辆的目标检测、路径规划和车辆控制等功能。
基于单片机的车辆自动驾驶系统设计中,单片机充当了系统的控制核心。
单片机通常选用高性能的ARM架构处理器,具有丰富的外设接口以及强大的运算和控制能力。
单片机通过与传感器和执行器的连接,实现对车辆环境信息的获取和对车辆的控制。
在这个系统中,单片机起到了数据处理、决策和控制的关键作用。
在设计基于单片机的车辆自动驾驶系统时,首先需要考虑的是传感器的选择和布局。
常用的传感器包括雷达、摄像头、激光雷达等。
雷达主要用于测距和障碍物检测,可以提供较远距离的检测能力。
摄像头则主要用于检测车辆周围的图像信息,可以实现对车道线、标志物、行人等的检测。
激光雷达则可以提供高精度的环境地图,用于车辆的定位和路径规划。
接下来,需要考虑如何将传感器数据与单片机进行连接和通信。
可以通过多种方式实现传感器数据与单片机的通信,例如串口、I2C、SPI等。
在选择通信方式时,需要考虑数据传输速率、通信距离和稳定性等因素。
此外,还需要编写相应的驱动程序,以实现对传感器的控制和数据采集。
在获取传感器数据后,接下来需要进行数据处理和决策。
数据处理主要包括对传感器数据的滤波、降噪和特征提取等操作,以获得准确的环境信息。
决策模块则通过对环境信息的分析和判断,制定出最优的行驶策略。
在这个过程中,算法的选择和优化将起到至关重要的作用。
单片机系统设计与实现

单片机系统设计与实现单片机系统是一种基于单片机的微控制系统,在现代电子技术领域广泛应用。
它可以对外界信号进行采集、处理和控制,实现各种自动化控制和智能化功能。
单片机系统设计和实现是一项综合性工程,需要掌握硬件设计、软件编程等多方面知识和技能。
本文将介绍单片机系统的基本原理、设计流程和实现方法,并分享一些设计和实现的技巧和经验。
一、单片机系统原理单片机系统由单片机、外围设备和外界环境三部分组成。
其中单片机是系统的核心,负责进行数据处理和控制。
外围设备包括传感器、执行器、显示器等,用于与外界进行交互和控制。
外界环境则是单片机系统所处的物理环境和电气环境。
单片机是一种集成了处理器、存储器、输入输出口和各种外设接口的芯片,具有体积小、速度快、功耗低等优点。
单片机可以通过编程实现不同的功能,如测量温度、控制电机、播放音乐等。
常见的单片机有51系列、AVR系列、ARM系列、STM32系列等。
外围设备和外界环境对单片机系统的性能和稳定性有重要影响。
传感器用于采集各种模拟量信号,如温度、湿度、光照等。
执行器用于控制各种机械、电气和液压装置,如电机、阀门、泵站等。
显示器用于显示各种文本和图形信息,如LCD显示器、LED灯等。
外界环境包括电源、噪声、电磁干扰等,会影响单片机系统的电路设计和信号处理。
二、单片机系统设计流程单片机系统设计包括硬件设计和软件编程两部分,它们是相互独立但又相互关联的。
硬件设计包括电路设计、PCB设计和电源设计等;软件编程包括程序设计、调试和优化等。
1.需求分析在进行单片机系统设计之前,需要进行需求分析,明确系统的功能和性能要求。
需求分析包括系统的输入输出、运算速度、存储容量、接口类型和通讯方式等。
对于不同的应用场景和要求,需要选择不同的单片机型号、外围设备和外界环境。
2.硬件设计硬件设计是单片机系统设计的重要组成部分。
它包括电路设计、PCB设计和电源设计等。
电路设计是根据系统的功能需求和信号特性设计电路图,并选用合适的电子元器件。
第9章 单片机应用系统开发的一般方法

单片机应用系统开发的一般方法单片机应用系统是为完成某项任务而研制开发的用户系统,虽然每个系统都有很强的针对性,结构和功能各异,但其开发过程和方法大致相同。
这里介绍单片机应用系统开发的一般方法和步骤.1.确定任务单片机应用系统的开发过程由确定系统的功能与性能指标开始。
首先要细致分析、研究实际问题,明确各项任务与要求,综合考虑系统的先进性、可靠性、可维护性以及成本、经济效益,拟订出合理可行的技术性能指标。
2.总体设计在对应用系统进行总体设计时,应根据应用系统提出的各项技术性能指标,拟订出性价比最高的一套方案。
总体设计最重要的问题包括以下三个方面:(1)机型选择根据系统的功能目标、复杂程度、可靠性要求、精度和速度要求来选择性能/价格比合理的单片机机型。
目前单片机种类、机型多,有8位、16位、32位机等,片内的集成度各不相同,有的机型在片内集成了WDT、PWM、串行EEPROM 、A/D、比较器等多种功能以及提供UART、I2C、SPI协议的串行接口,最大工作频率也从早期的0~12MHz增至33~40MHz。
在进行机型选择时应考虑:①所选机型性能应符合系统总体要求,且留有余地,以备后期更新。
②开发方便,具有良好的开发工具和开发环境。
③市场货源(包括外部扩展器件)在较长时间内充分。
④设计人员对机型的开发技术熟悉,以利缩短研制周期。
(2)系统配置选定机型后,再选择系统中要用到的其他外围元器件,如传感器、执行器件、人机接口、存储器等。
整个系统中的相关器件要尽可能做到性能匹配,例如,选用晶振频率较高时,存储器的存取时间就短,应选择存取速度较快的芯片;选择CMOS型单片机构成低功耗系统时,系统中的所有芯片都应该选择低功耗产品。
如果系统中相关器件性能差异很大,系统综合性能将降低,甚至不能正常工作。
(3)软硬件分工在总体方案设计过程中,对软件和硬件进行分工是一个首要的环节。
原则上,能够由软件来完成的任务就尽可能用软件来实现,以降低硬件成本,简化硬件结构,提高可靠性,但是可能会降低系统的工作速度。
简述单片机系统的开发过程

单片机系统的开发过程一、概述在现代的电子产品中,单片机系统作为一种常见的控制设备,广泛应用于各个领域。
单片机系统的开发过程是指从设计到最终实现一个全功能的单片机控制系统的全过程。
本文将详细介绍单片机系统的开发过程,包括软硬件设计、程序编写、系统调试等方面的内容。
二、单片机系统开发前的准备工作在开始单片机系统的开发之前,需要进行一些准备工作,包括定义系统的功能需求、选择合适的单片机芯片,以及确定系统的硬件基本组成等。
1. 系统功能需求的定义首先,我们需要明确单片机系统的功能需求,即系统需要实现的具体功能。
这些功能需求通常来自于用户的需求或者项目的设计要求。
在定义功能需求时,需要考虑系统的输入输出接口、通信接口、数据处理能力等方面。
2. 单片机芯片的选择根据系统的功能需求,我们需要选择合适的单片机芯片。
在选择单片机芯片时,需要考虑硬件性能、封装形式、成本等因素。
同时,还需要确认单片机芯片是否能满足系统的功能需求。
3. 硬件的基本组成确定确定了单片机芯片之后,我们需要确定系统的硬件基本组成,包括输入输出接口电路、外设电路、电源电路等。
这些硬件组成需要根据系统的功能需求来确定,并保证其与选定的单片机芯片的兼容性。
三、单片机系统开发的具体步骤在准备工作完成之后,可以开始进行单片机系统的开发。
下面将介绍单片机系统开发的具体步骤,主要包括软硬件设计、程序编写、系统调试等方面。
1. 硬件设计硬件设计是单片机系统开发的核心部分。
在硬件设计过程中,需要完成以下几个步骤:•电路原理图设计:根据系统需求和单片机芯片的引脚定义,设计系统的电路原理图,包括电源电路、输入输出接口电路、外设电路等。
•PCB设计:根据电路原理图,设计系统的PCB布局,将电路连线布局在PCB 板上,并进行电路走线、元器件安装等工作。
•硬件元器件的选型:根据系统的功能需求,选取合适的硬件元器件,包括电容、电阻、集成电路等。
•硬件的制作和组装:根据PCB设计,制作实际的硬件电路板,并对电路板进行组装和焊接,完成硬件系统的制作。
单片机系统开发流程
单片机系统开发流程一、明确开发任务在开始单片机系统开发之前,需要明确开发任务,包括系统功能、性能要求、成本预算等方面。
开发任务需要尽可能详细地描述整个系统,以便后续设计和开发能够按照需求进行。
二、系统设计根据开发任务,进行系统设计。
系统设计包括整体架构设计、电路设计、单片机选型、接口设计等方面。
系统设计需要考虑到系统的可维护性、可扩展性和可靠性。
三、单片机选型根据系统设计的要求,选择合适的单片机型号。
单片机的选择需要考虑其性能、功能、成本、功耗等因素。
同时,还需要考虑单片机的供货情况和未来升级的可能性。
四、硬件设计硬件设计包括电路设计、电路板布局、元件选型等方面。
电路设计需要根据系统设计的要求,设计单片机的外部电路和接口电路。
电路板布局需要考虑到元件的布局、布线规则、电磁兼容性等因素。
元件选型需要选择合适的元件型号和规格,以满足系统的性能和可靠性要求。
五、软件开发软件开发包括程序编写、编译、调试等方面。
程序编写需要根据系统设计的要求,编写单片机的程序代码。
编译是将程序代码转换成单片机可执行的机器码。
调试是测试程序代码的正确性和稳定性,发现并解决程序中的错误和问题。
六、程序调试程序调试是测试程序代码的正确性和稳定性。
在程序调试过程中,需要使用调试工具对程序进行跟踪和分析,找出程序中的错误和问题。
同时,还需要对程序进行压力测试和性能测试,以确保程序的稳定性和可靠性。
七、功能测试功能测试是测试单片机系统的功能是否满足开发任务的要求。
在功能测试过程中,需要测试单片机的输入输出、中断、定时器、串口等方面是否正常工作。
同时,还需要测试单片机系统的接口是否正常通信,是否能实现预期的功能。
八、系统集成系统集成是将硬件和软件集成在一起,形成一个完整的单片机系统。
在系统集成过程中,需要将硬件和软件进行联调,确保系统能够正常工作。
同时,还需要对系统进行优化和调整,以提高系统的性能和稳定性。
九、性能调试性能调试是测试单片机系统的性能和稳定性。
利用单片机开发linux编程思路

利用单片机开发linux编程思路以利用单片机开发Linux编程思路为主题,本文将介绍如何通过单片机来进行Linux编程的思路和方法。
Linux是一个开源的操作系统,具有稳定性、安全性和灵活性等优点,因此在嵌入式系统中得到了广泛的应用。
而单片机作为一种常见的嵌入式系统硬件平台,通过与Linux系统的结合,可以实现更多功能和扩展性。
我们需要选择一款适合的单片机开发板。
市面上有许多不同型号和品牌的单片机开发板可供选择,如Raspberry Pi、Arduino等。
选择合适的开发板是进行Linux编程的基础,根据实际需求和预算来选择适合的开发板。
接下来,我们需要安装Linux操作系统。
一般来说,Linux操作系统可以通过SD卡或者EMMC等存储设备进行安装。
具体的安装方法可以参考开发板厂家提供的文档或者论坛上的教程。
安装完成后,我们就可以进入Linux系统进行编程了。
在Linux系统中进行编程可以选择多种编程语言,如C、C++、Python等。
根据实际需求和个人喜好选择适合的编程语言。
对于初学者来说,C语言是一种较为常用的编程语言,也是学习Linux编程的基础。
在进行Linux编程时,我们可以利用单片机的GPIO接口来进行输入输出控制。
GPIO即通用输入输出,可以用于连接外部设备,如LED灯、传感器等。
通过对GPIO的控制,我们可以实现与外部设备的交互。
除了GPIO外,单片机还具有其他的外设接口,如UART、SPI、I2C等。
这些接口可以用于与其他设备进行通信,如串口通信、SPI 通信、I2C通信等。
通过这些接口,我们可以实现与其他设备的数据交换和通信。
在Linux系统中,我们可以使用相应的库函数来进行GPIO和外设接口的控制。
如wiringPi库、bcm2835库等。
这些库函数封装了底层的硬件操作,简化了编程过程。
在进行Linux编程时,我们还可以利用Linux系统提供的其他功能和服务,如网络通信、多线程编程、文件系统操作等。
单片机在系统中的作用
单片机在系统中的作用《单片机在系统中的作用》想象一下这样一个场景:你走进一家现代化的智能家居体验店,店内的灯光会根据你的走动自动调整亮度,空调能自动感知室内温度并调节到最舒适的状态,窗帘也会随着阳光的强弱自动开合。
这一切看起来就像是魔法一样,但其实啊,背后的大功臣就是单片机。
我看到一位年轻的爸爸带着他好奇的小女儿在店里体验。
小女儿眼睛睁得大大的,满是惊奇,她拉着爸爸的手问:“爸爸,这些东西怎么这么聪明呀?”爸爸笑着摸摸她的头说:“宝贝,这可不是它们自己这么聪明的,是有一个小‘大脑’在指挥它们呢,这个小‘大脑’就是单片机。
”那单片机到底是什么呢?简单来说,它就像是一个超级小管家。
比如说,在那些能自动调节亮度的灯光系统里,单片机就像是一个眼睛超级尖的小管家。
它时刻在“监视”着周围的环境,就像一个警惕的士兵。
当有人走进房间,传感器会把有人的这个信息传递给单片机,单片机就像接到命令的指挥官一样,迅速给灯光系统下达指令,让灯光变亮。
如果房间里没人了呢?它又会让灯光暗下来,节省能源。
这过程就像一场配合默契的接力赛,传感器是第一棒,单片机是关键的第二棒,灯光系统就是最后一棒,它们缺一不可。
再看看空调。
空调中的单片机就像是一个温度感知大师。
你可以把它想象成一个住在空调里的小精灵,它知道什么时候温度太高了,什么时候温度太低了。
当夏天外面骄阳似火,室内温度不断升高的时候,温度传感器就把这个“热”的消息告诉单片机。
这个时候的单片机就像热锅上的蚂蚁一样着急,它赶紧让空调开始制冷,把温度降下来。
要是冬天呢?它又会反着来,让空调制热。
如果没有单片机,空调就只能像个没头的苍蝇,要么一直制冷,要么一直制热,那可就乱套了。
再来说说那些自动开合的窗帘。
单片机在这个系统里就像是一个阳光探测器。
当早晨阳光温柔地洒进来,光线慢慢变强的时候,安装在窗户边的光线传感器就把这个信息传达给单片机。
单片机就像一个严格的指挥家,指挥着窗帘电机开始工作,让窗帘缓缓拉上,挡住过于强烈的阳光。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机怎么跑系统
单片机怎幺跑系统
跑系统的单片机可以更有效地支持多任务,完成更加复杂的任务;裸奔的单片机只能进行单任务。
跑系统的单片机需要更大的存储空间用于系统程序和用户程序;裸奔的单片机对存储空间的需求较低。
没有操作系统的单片机,早期也出现了一些支持多任务的底层COS。
但实质上应用COS还是要和底层硬件打交道。
当更加复杂昂贵的单片机出现后就有条件使应用开发完全与底层及其版本无关,这就是借助操作系统。
少数专业的底层开发者支持了数量巨大的应用开发者,大大降低了技。