单片机源代码
单片机程序源代码

步进电机程序源代码#include<reg52.h>unsigned char step[]={0x01,0x02,0x04,0x08};sbit beep=P3^4;void delay_50us(unsigned int){unsigned int j;for(;t>0;t--)for(j=19;j>0;j--);}void main(){unsigned int i,k;for(i=512;i>=0;i--){for(k=0;k<4;k++){P1=step[k];delay_50us(200);}delay_50us(2000);if(i==0){beep=1;delay_50us(1000);}elsebeep=0;}}数码管电子时钟程序源代码#include<reg52.h> //在数码管上显示1~65536的数字,间隔1秒。
#define uint unsigned int#define uchar unsigned charuchar code d[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40};uchar code w[]={0x7f,0xbf,0xdf,0xef,0xf7,0xfb,0xfd,0xfe};//8个数码管的排列是从左到右:0,1,2,3,4,5,6,7sbit Exint0 = P3^2;sbit Exint1 = P3^3;sbit keyinc = P0^0; //单片机的第39脚sbit keydec = P0^1; //单片机的第38脚sbit SetH = P0^2; //单片机的第37脚sbit SetM = P0^3; //单片机的第36脚//sbit SetS = P0^4;char s,m,h; //定义秒、分、时变量uchar num=0,Stopgo = 1,hm = 0; void ExInt0init(void);void ExInt1init(void);void KeyScan(void);void delay(uint z){uint x,y;for(x=10;x>0;x--)for(y=z;y>0;y--);}void delay_50us(uint t){uint j;for(;t>0;t--)for(j = 19;j > 0;j--);}void display(){P1 = d[s%10];P2 = w[0];delay(10);P1 = d[s/10];P2 = w[1];delay(10);P1 = d[10]; //显示“-”P2 = w[2];delay(10);P2 = w[5];delay(10);delay(10);P1 = d[m%10];P2 = w[3];delay(10);P1 = d[m/10];P2 = w[4];delay(10);P1 = d[h%10];P2 = w[6];delay(10);P1 = d[h/10];P2 = w[7];delay(10);}void changenum(){if(num==20){num=0;if(Stopgo) s++; //让“ClockSet”来控制是否数字加1}if(s>=60){ s=0;if(++m>=60){ m=0;if(++h>=24)h=0;}}display();}void init_timer(){TMOD=0x01;TH0=(65535-50000)/256; //如果时间要完全精确,需用12MHZ的晶振TL0=(65535-50000)%256;EA=1; //开总中断开关ET0=1; //开定时器0中断开关TR0=1; //开始定时}void main(){init_timer(); //调用定时器初始化函数ExInt0init(); //调用外部中断0初始化函数ExInt1init(); //调用外部中断1初始化函数while(1){Exint0 = 1; //P3.2 = 1Exint1 = 1; //P3.3 = 1if(Stopgo == 0)KeyScan();elsechangenum();display();}}void ExInt0init(void){Exint0 = 1; //P3.2 = 1PX0 = 1;EX0 = 1; //打开外部中断0中断开关IT0 = 1; //设置外部中断的触发方式,IT0 = 0代表低电平触发;IT0 = 1代表下降沿触发EA = 1; //打开总中断开关}void ExInt1init(void){Exint1 = 1; //P3.3 = 1PX1 = 1;EX1 = 1;IT1 = 1; //设置外部中断的触发方式,IT0 = 0代表低电平触发;IT0 = 1代表下降沿触发EA = 1;}void timer() interrupt 1{TH0=(65535-50000)/256;TL0=(65535-50000)%256;TF0 = 0;num++;}void exInt0(void) interrupt 0{Stopgo = 0; //当按下停止按钮时,产生外部中断0,将标志“Stopgo”清0,停止数字加1。
AM2301与单片机源代码
#include<reg52.h>#define uchar unsigned char#define uint unsigned intuint hum,temp; //定义湿度、温度(全局)uchar hum_h,hum_l,temp_h,temp_l,check; //湿度高、低8位,温度高、低8位,校验位uchar bai,shi,ge,bai1,shi1,ge1; //数码管,cnt=0sbit duan=P2^7;sbit wei=P2^6;sbit lcdE=P3^4; //液晶使能信号由P10口控制sbit RS=P3^5; //数据/命令选择端由p10口控制sbit RW=P3^1;sbit dht=P1^0;/******************************邮保╱s级)函数******************************/void delay_us(uint i){while(i--);}/******************************延时(ms级)函数******************************/void delay1(uint z){uint x,y;for (x=z;x>0;x--)for(y=110;y>0;y--);}/***********************************温湿度初始化(准备传送数据)函数***********************************/void dht_init(){dht=0;delay_us(50); //拉低延时500微秒,发送开始信号dht=1; //释放总线,延时30微秒delay_us(4);while(!dht); //拉低等待while(dht); // 拉高等待,即将传送数据}/************************************读取字节函数************************************/uchar read_byte(){uchar n,byte=0,dat;for(n=0;n<8;n++){while(!dht);delay_us(4); //理论上28us<延时<70us,此处写2--6都可以dat=0;if(dht)dat=1;while(dht);byte<<=1;byte|=dat;}return byte;}/********************************读40位数据函数********************************/void read_hum_temp(){dht_init();hum_h=read_byte(); //读湿度hum_l=read_byte();temp_h=read_byte(); //读温度temp_l=read_byte();check=read_byte(); //读校验while(!dht);// 等待低电平结束dht=1; //最后拉高总线}/************************************数据转化函数提取各位数字************************************/void zhuanhuan(){uchar a;a=hum_h+hum_l+temp_h+temp_l;if(a==check){hum=temp=0;hum=((hum|hum_h)<<8)|hum_l;temp=((temp|temp_h)<<8)|temp_l;bai=temp/100+0x30;shi=temp%100/10+0x30;ge=temp%10+0x30;bai1=hum/100+0x30;shi1=hum%100/10+0x30;ge1=hum%10+0x30;}else bai=shi=ge=bai1=shi1=ge1=0;}/******************************写入数据函数******************************/void writedat(uchar dat){RS=1; // RS拉高RW=0;P1=dat; // 输入数据delay1(3);lcdE=1; //使能信号端高脉冲delay1(3);lcdE=0;}/*******************************写入指令函数********************************/void writeml(uchar ml){RS=0; // RS拉低RW=0;P1=ml; //输入指令delay1(5);lcdE=1; // 使能信号端高脉冲delay1(5);lcdE=0;}/****************************初始化函数****************************/void chushihuay(){lcdE=0;writeml(0x38); //显示设置5*7点阵,8位数据接口writeml(0x0C); // 显示光标设置,开显示,不显光标writeml(0x06); // 设置写字符后地址指针加一writeml(0x01);}/*************************************显示函数************************************/void saomiao(){writeml(0x80); //在第二行显示湿度,温度writedat(bai1);writedat(shi1);writedat(0x2e);writedat(ge1);writeml(0x90);writedat(bai);writedat(shi);writedat(0x2e);writedat(ge);writeml(0x88);writedat(0xdf);writedat(0x43);}void main(){duan=0;wei=0;chushihuay();delay1(200);while(1){read_hum_temp();zhuanhuan();saomiao();delay1(500);// 此处的时间不能小于3000,否则读不出!!!!!!!!}}。
单片机 模糊控制pid 源代码
单片机模糊控制pid 源代码1. 单片机模糊控制PID的基本原理单片机模糊控制PID是一种基于模糊控制理论和PID控制理论相结合的控制方法。
其基本原理是通过模糊控制算法对系统进行模糊化处理,将输入和输出都转化为模糊量,然后再利用PID控制算法对模糊量进行处理,最终得到控制量,从而实现对系统的控制。
2. 单片机模糊控制PID的源代码实现单片机模糊控制PID的源代码实现需要先进行模糊化处理,然后再进行PID控制计算。
下面是一个基于C语言的单片机模糊控制PID的源代码示例:```#include <stdio.h>#include <stdlib.h>#include <math.h>//模糊化处理函数float fuzzy(float error){float fuzzy_error = 0;if(error < -10)fuzzy_error = -1;else if(error >= -10 && error < -5)fuzzy_error = (error + 10) / 5;else if(error >= -5 && error <= 5)fuzzy_error = 0;else if(error > 5 && error <= 10)fuzzy_error = (error - 5) / 5;else if(error > 10)fuzzy_error = 1;return fuzzy_error;}//PID控制函数float PID(float error, float last_error, float sum_error) {float kp = 0.5;float ki = 0.1;float kd = 0.2;float p = kp * error;float i = ki * sum_error;float d = kd * (error - last_error);return p + i + d;}int main(){float error = 0;float last_error = 0;float sum_error = 0;float control = 0;for(int i = 0; i < 100; i++){error = 10 - i;float fuzzy_error = fuzzy(error);sum_error += error;control = PID(fuzzy_error, last_error, sum_error);last_error = error;printf("control: %f\n", control);}return 0;}```3. 单片机模糊控制PID的应用场景单片机模糊控制PID可以应用于各种需要精确控制的场景,例如温度控制、机器人控制、电机控制等。
51单片机操作系统的实现+源代码
51单片机操作系统开发中的问题与技巧附代码引言51系列单片机是美国Intel公司在1980年推出的高性能8位单片机,在我国的应用非常广泛。
目前,在软件设计中需要软件工程师从底层做起,在系统软件设计方面需要做大量的重复性劳动。
如果开发一套基于51系列单片机的操作系统,那么用户只需要编写各个任务的程序,不必同时将所有任务运行的各种情况记在心中,不但大大减少了程序编写的工作量,而且减少了出错的可能性。
1 开发平台的选择和论证开发平台的选择至关重要,因为有时它不光影响进度、产品质量、可维护性等一般问题,还涉及到方案的可实现性。
在本系统中,选择51系列单片机作为操作系统的运行平台有以下原因。
首先,51系列单片机应用非常广泛,一大批性能优越的51兼容单片机相继推出。
这里包括:低功耗、高速度和增强型的Philips公司的系列产品;完美地将Flash(非易失闪存技术)EEPROM与80C51内核结合起来的Atmel公司的系列产品;在抗干扰性能,电磁兼容和通信控制总线功能上独树一帜,其产品常用于工作环境恶劣场合的Siemens公司的系列产品以及一些其它公司的产品。
既然产品如此丰富,性能如此优越,那么在处理多任务并且对实时性要求严格的系统设计中,为了充分挖掘单片机的潜能(尤其是在实时性方面),也是为了简化开发的过程,基于51系列单片机的实时操作系统的需求就十分强烈了。
Keil公司的RTX51 Full就是一个基于51系列单片机的有实用价值的实时操作系统,但该操作系统是一个源码不公开的收费软件。
其次,借助于Keil C51的集成开发环境,完全可以开发出适用于51系列单片机的操作系统代码。
Keil C51软件提供丰富的库函数和功能强大的Windows界面集成开发调试工具。
另外重要的一点,Keil C51生成的目标代码效率非常高,多数语句生成的汇编代码很紧凑,容易理解。
在开发大型软件时,更能体现高级语言的优势。
C编译器能产生可重入代码,而且用C语言可以打开和关闭中断。
单片机程序流程图及源代码
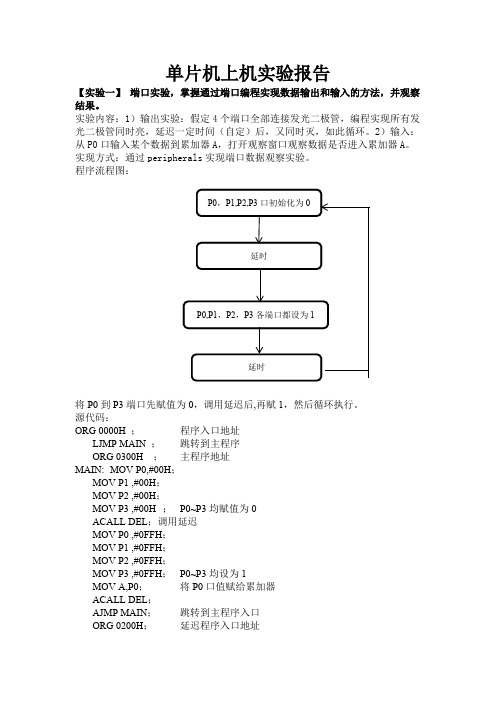
单片机上机实验报告【实验一】端口实验,掌握通过端口编程实现数据输出和输入的方法,并观察结果。
实验内容:1)输出实验:假定4个端口全部连接发光二极管,编程实现所有发光二极管同时亮,延迟一定时间(自定)后,又同时灭,如此循环。
2)输入:从P0口输入某个数据到累加器A,打开观察窗口观察数据是否进入累加器A。
实现方式:通过peripherals实现端口数据观察实验。
程序流程图:将P0到P3端口先赋值为0,调用延迟后,再赋1,然后循环执行。
源代码:ORG 0000H ;程序入口地址LJMP MAIN ;跳转到主程序ORG 0300H ;主程序地址MAIN:MOV P0,#00H;MOV P1 ,#00H;MOV P2 ,#00H;MOV P3 ,#00H ;P0~P3均赋值为0ACALL DEL;调用延迟MOV P0 ,#0FFH;MOV P1 ,#0FFH;MOV P2 ,#0FFH;MOV P3 ,#0FFH;P0~P3均设为1MOV A,P0;将P0口值赋给累加器ACALL DEL;AJMP MAIN;跳转到主程序入口ORG 0200H;延迟程序入口地址DEL:MOV R5,#04H;寄存器实现延迟,F3:MOV R6,#0FFH;若主频为12MHZ则F2:MOV R7,#0FFH;延时为256*256*4F1:DJNZ R7,F1;0.26S,人眼可分辨DJNZ R6,F2;DJNZ R5,F3;RET;从延迟程序返回END;结束3.假设P0口外接一个数码管(共阴),如图,请在数码管上轮流显示数字0~9(采用软件延时)。
程序流程图:将数码管的真值编码0~9依次赋给P0并调用延迟,然后循环运行程序即可。
源代码:ORG 0000H; 程序入口SJMP MAIN; 跳转到主程序ORG 0300H; 主程序入口地址MAIN:MOV P0,#0FCH; 将数码管0的编码赋给P0口ACALL DELAY; 调用延迟,使数码管亮0持续0.33SMOV P0,#60H; show 1ACALL DELAY;MOV P0,#0DAH; show 2ACALL DELAY;MOV P0,#0F2H; show 3ACALL DELAY;MOV P0,#66H; show 4ACALL DELAY;MOV P0,#0B6H; show 5ACALL DELAY;MOVP0,#0BEH; show 6ACALL DELAY;MOV P0,#0E0H; show 7ACALL DELAY;MOV P0,#0FEH; show 8ACALL DELAY;MOV P0,#0F6H; show 9ACALL DELAY;AJMP LOOP; 跳转到主程序入口ORG 0200H; 延迟程序入口DEL:MOV R5,#05H; 采用软件延迟,若主频为12MHz,则DEL1:MOV R6,#0FFH; 定时时间为256*256*5*1uS=0.33S,DEL2:MOV R7,#0FFH; 人眼可分辨。
51单片机读写AT24C02源代码详细注释
51单片机读写AT24C02源代码(详细注释)在P1口上接八个led灯,结果就显示在这八个灯上面。
AT24C02的接线方式见程序的顶部的定义。
以下是源代码:#include ;//包含头文件typedef unsigned char uchar;typedef unsigned int uint;#define write_c02 0xa0#define read_c02 0xa1sbit sda = P2^0;sbit scl = P2^1;void delay(){ //delay:5us;;}//i2c:initvoid i2c_init(){sda = 1;delay();scl = 1;delay();}//delayms:void delayms(uint xms){uchar x, y;for(x = xms; x >; 0; x--)for(y = 110; y >; 0; y--);}//start:void start() //启动i2c{sda = 1;scl = 1;delay();//延时必须大于4.7us,此约为五微秒sda = 0; //在scl为高电平时,sda一个下降沿为启动信号delay();}//stop:void stop() //停止i2c{sda = 0;scl = 1;delay();sda = 1; //在scl为高电平时,sdasda一个上升沿为停止信号delay();}//ack:void ack() //应答信号0{uchar i = 0; //等待变量scl = 1;//在scl为高电平期间等待应答delay();while((sda == 1) && i < 250)//若为应答0即退出,从机向主机发送应答信号i++;//等待一段时间scl = 0; //应答之后将scl拉低delay();}//nack:void nack() //非应答{scl = 1;//在scl为高电平期间,由主机向从机发送一个1,非应答信号delay();sda = 1;scl = 0; //应答之后将scl拉低delay();}//send byte:void send_byte(uchar date)//写一个字节{uchar i, temp;temp = date; //存入要写入的数据,即要发送到sda上的数据for(i = 0; i < 8; i++){ //发送8位temp <<= 1; //to CY 将数据的最高位移入到PSW中的CY位中scl = 0;//只有在scl为低电平时,才允许sda上的数据变化delay();sda = CY; //将CY里的数据发送到sda数据线上delay(); //可以延时scl = 1; //在scl为高电平时,不允许sda上的数据变化,使数据稳定delay();scl = 0;//允许sda数据线的数据变化,等待下一个数据的传输delay();}//wait ack:发送完一个字节数据后要主机要等待从机的应答,第九位scl = 0;//允许sda变化delay();sda = 1;//wait:ack,sda拉高等待应答,当sda=0时,表示从机的应答delay();}//read: byteuchar read_byte() //读一个字节数据{uchar i, j, k;scl = 0; //读之前先允许sda变化delay(); //等待数据for(i = 0; i < 8; i++){scl = 1; //不允许sda变化delay(); //使sda数据稳定后开始读数据j = sda; //读出sda上的数据k = (k << 1)| j; //将数据通过|运算存入k中scl = 0;//允许sda变化等待下一位数据的到来delay();}//delay();//可不用延时return k;//返回读出的数据}//write:at24c02 在at24c02中的指定地址写入数据void write_at24c02(uchar address, uchar date) {start(); //启动i2csend_byte(write_c02);//写入期间地址和写操作ack(); //从机应答0send_byte(address); //写入写数据的单元地址ack(); //ack0send_byte(date); //在指定地址中写入数据ack(); //从机应答0stop();//停止i2c}//read: at24c02在at24c02的指定地址中读出写入的数据uchar read_at24c02(address){uchar dat;//用来存储读出的数据start(); //启动i2csend_byte(write_c02); //写入at24c02器件地址和写操作ack(); //从机应答0send_byte(address); //写入要读取AT24C02的数据的单元地址ack(); //从机应答0start(); //再次启动i2csend_byte(read_c02); //写入AT24C02器件地址和读操作ack();//从机应答‘0’dat = read_byte();//读出指定地址中的数据nack(); //主机发出非应答‘1’stop(); //停止i2creturn dat;//返回读出的数据}//main:void main(){uchar i;i2c_init();start();while(1){for(i = 0x00; i < 0xff; i++){write_at24c02(10, i);delayms(10);//需等待十毫秒P1 = read_at24c02(10);//1010 1010 delayms(2000);}}}。
简单的单片机花样流水灯C语言源代码

简单的单片机花样流水灯C语言源代码#include<reg51.h> //51系列单片机定义文件#define uchar unsigned char //定义无符号字符#define uint unsigned int //定义无符号整数void Delayms(uint x){ //定义延时函数uint i,j;for(i=x;i>0;i--)for(j=110;j>0;j--);}void main(){uint i;uchar temp;while(1){temp=0x01; //8个流水灯逐个闪动for(i=0;i<8;i++){P0=~temp;Delayms(50);temp<<=1;}temp=0x80; //8个流水灯反向逐个闪动for(i=0;i<8;i++){P0=~temp;Delayms(50);temp>>=1;}temp=0xfe; //8个流水灯依次全部点亮for(i=0;i<8;i++){P0=temp;Delayms(50);temp<<=1;}temp=0x7f; //8个流水灯依次反向全部点亮for(i=0;i<8;i++){P1=temp;Delayms(50);temp>>=1;}}}//此程序的作者向往未来#include<reg52.h>#include<intrins.h>#define uint unsigned int#define uchar unsigned char uchar z=50,e=0x00,f=0xff; uchar code table1[]={0x80,0xc0,0xe0,0xf0,0xf8,0xfc,0xfe,0xff};uchar code table2[]={0x7f,0x3f,0x1f,0x0f,0x07,0x03,0x01,0x00}; uchar code table3[]={0x01,0x03,0x07,0x0f,0x1f,0x3f,0x7f,0xff};uchar code table4[]={0xe7,0xdb,0xbd,0x7e,0xbd,0xdb,0xe7,0xff};uchar code table5[]={ 0xe7,0xc3,0x81,0x00, 0x81,0xc3,0xe7,0xff}; uchar code table6[]={ 0x7e,0x3c,0x18,0x00, 0x18,0x3c,0x7e,0xff}; void delay(uchar); void lsd1();void lsd2();void lsd3();void lsd4();void lsd5();void lsd6();void lsd7();void lsd8();void lsd9();void lsd10();void lsd11();void lsd12();main(){while(1){lsd1();lsd2();lsd3();lsd4();lsd5();lsd6();lsd7();lsd8();lsd9();lsd10();lsd11();lsd12();}}void delay(uchar x) //延时函数{uint i,j;for(i=x;i>0;i--)for(j=250;j>0;j--);}void lsd1() //lsd1 单个流水灯双程模式1{uchar a,i,j,k,l,l1,k1,j1,i1;a=0xfe;P0=a;delay(z);for(i=0;i<7;i++) //仅单个灯亮从上往下流{a=_crol_(a,1);P0=a;delay(z);}P0=0xff;a=0xfe;P2=a;delay(z);for(j=0;j<7;j++){a=_crol_(a,1);P2=a;delay(z);}P2=0xff;a=0xfe;P3=a;delay(z);for(k=0;k<7;k++) {a=_crol_(a,1);P3=a;delay(z);}P3=0xff;a=0xfe;P1=a;delay(z);for(l=0;l<7;l++) {a=_crol_(a,1);P1=a;delay(z);}a=0xbf;P1=a;delay(z);for(l1=0;l1<6;l1++) //l1==6 仅单个灯亮从下往上流{a=_cror_(a,1);P1=a;delay(z);}P1=0xff;a=0x7f;P3=a;delay(z);for(k1=0;k1<7;k1++){a=_cror_(a,1);P3=a;delay(z);}P3=0xff;a=0x7f;P2=a;delay(z);for(j1=0;j1<7;j1++){a=_cror_(a,1);P2=a;delay(z);}P2=0xff;a=0x7f;P0=a;delay(z);for(i1=0;i1<7;i1++){a=_cror_(a,1);P0=a;delay(z);}P0=0xff;}void lsd2() //lsd2 两个灯流水双程模式1{uchar a,i,j,k,l,l1,k1,j1,i1; a=0xfe;P0=a;delay(z);a=a<<1;P0=a;delay(z);for(i=0;i<6;i++){a=_crol_(a,1);P0=a;delay(z);}P0=0x7f;P2=0xfe;delay(z);P0=0xff;a=0xfc;P2=a;delay(z);for(j=0;j<6;j++) {a=_crol_(a,1);P2=a;delay(z);}P2=0x7f;P3=0xfe;delay(z);P2=0xff;a=0xfc;P3=a;delay(z);for(k=0;k<6;k++) {a=_crol_(a,1);P3=a;delay(z);}P3=0x7f;P1=0xfe;delay(z);P3=0xff;a=0xfc;P1=a;delay(z);for(l=0;l<6;l++) {a=_crol_(a,1);P1=a;delay(z);}P1=0x7f;delay(z);P1=0xff;delay(z);a=0x7f;P1=a;delay(z);a=a>>1;P1=a;delay(z);for(l1=0;l1<6;l1++) {a=_cror_(a,1);P1=a;delay(z);}P1=0xfe;P3=0x7f;delay(z);P1=0xff;a=0x3f;P3=a;delay(z);for(k1=0;k1<6;k1++) {a=_cror_(a,1);P3=a;delay(z);}P3=0xfe;P2=0x7f;delay(z);P3=0xff;a=0x3f;P2=a;delay(z);for(j1=0;j1<6;j1++) {a=_cror_(a,1);P2=a;delay(z);}P2=0xfe;P0=0x7f;delay(z);P2=0xff;a=0x3f;P0=a;delay(z);for(i1=0;i1<6;i1++) {a=_cror_(a,1);P0=a;delay(z);}P0=0xfe;delay(z);P0=0xff;delay(z);}void lsd3() //lsd3 两个灯流水双程模式2{uchar a,i,j,k,l,l1,k1,j1,i1;a=0xfe;P0=a;delay(z);a=a<<1;P0=a;delay(z);for(i=0;i<6;i++) //_crol_与_cror_混合使用{a=_crol_(a,1);P0=a;delay(z);}P0=0x7f;a=0x7f;P2=a;delay(z);P0=f;a=a>>1;P2=a;delay(z);for(j=0;j<6;j++) {a=_cror_(a,1);P2=a;delay(z);}P2=0xfe;a=0xfe;P3=a;delay(z);P2=f;a=a<<1;P3=a;delay(z);for(k=0;k<6;k++) {a=_crol_(a,1);P3=a;delay(z);}P3=0x7f;a=0x7f;P1=a;delay(z);P3=f;a=a>>1;P1=a;delay(z);for(l=0;l<6;l++) {a=_cror_(a,1);P1=a;delay(z);}P1=0xfe;delay(z);P1=f;delay(z);P1=a;delay(z);a=a<<1;P1=a;delay(z);for(l1=0;l1<6;l1++) //l1==6 {a=_crol_(a,1);P1=a;delay(z);}P1=0x7f;a=0x7f;P3=a;delay(z);P1=f;a=a>>1;P3=a;for(k1=0;k1<6;k1++){a=_cror_(a,1);delay(z);}P3=0xfe;a=0xfe;P2=a;delay(z);P3=f;a=a<<1;P2=a;delay(z);for(j1=0;j1<6;j1++) {a=_crol_(a,1);P2=a;delay(z);}P2=0x7f;a=0x7f;P0=a;delay(z);P2=f;a=a>>1;P0=a;delay(z);for(i1=0;i1<6;i1++){a=_cror_(a,1);P0=a;delay(z);}P0=0xfe;delay(z);P0=f;delay(z);}void lsd4() //lsd4 {uchar a,i,j,k,l,l1,k1,j1,i1;a=0xfe;P0=a;delay(z);for(i=0;i<7;i++){a=a<<1; //单个灯依次点亮所有灯,从上往下P0=a;delay(z);}a=0xfe;P2=a;delay(z);for(j=0;j<7;j++){a=a<<1;P2=a;delay(z);}a=0xfe;P3=a;delay(z);for(k=0;k<7;k++){a=a<<1;P3=a;delay(z);}a=0xfe;P1=a;delay(z);for(l=0;l<7;l++){a=a<<1;P1=a;delay(z);}for(l1=0;l1<8;l1++) //l1==8{P1=table1[l1]; //单个灯依次熄灭所有灯,从下往上delay(z);}for(k1=0;k1<8;k1++){P3=table1[k1];delay(z);}for(j1=0;j1<8;j1++){P2=table1[j1];delay(z);}for(i1=0;i1<8;i1++){P0=table1[i1];delay(z);}}void lsd5() //lsd5 {uchar a,i,j,k,l,l1,k1,j1,i1;a=0xfe;P0=a;delay(z);for(i=0;i<7;i++){a=a<<1;P0=a;delay(z);}for(j=0;j<8;j++) //单个灯依次点亮所有灯,从下往上{P2=table2[j];delay(z);}a=0xfe;P3=a;delay(z);for(k=0;k<7;k++){a=a<<1;P3=a;delay(z);}for(l=0;l<8;l++){P1=table2[l];delay(z);}for(l1=0;l1<8;l1++) //单个灯依次熄灭所有灯,从上往下{P1=table3[l1];delay(z);}for(k1=0;k1<8;k1++){P3=table1[k1];delay(z);}for(j1=0;j1<8;j1++) //单个灯依次熄灭所有灯,从上往下{P2=table3[j1];delay(z);}for(i1=0;i1<8;i1++){P0=table1[i1];delay(z);}}void lsd6() //每组为单位同亮同灭从左向右再向左{P0=0x00;delay(z);P0=0xff;P2=0x00;delay(z);P2=0xff;P3=0x00;delay(z);P3=0xff;P1=0x00;delay(z);P3=0x00;P1=0xff;delay(z);P2=0x00;P3=0xff;delay(z);P0=0x00;P2=0xff;delay(z);P0=0xff;delay(z);}void lsd7() //lsd7 全亮全灭{uchar i;for(i=0;i<2;i++){P0=0x00;P1=0x00;P2=0x00;P3=0x00;delay(z);P0=0xff;P1=0xff;P2=0xff;P3=0xff;delay(z);}}void lsd8() //每组仅两个灯,从中间往两边再往中间{uchar i;for(i=0;i<8;i++){P0=table4[i];P1=table4[i];P2=table4[i];P3=table4[i];delay(z);}}void lsd9() //每组两个灯引亮所有灯再引灭,从中间带两边再到中间{uchar i;for(i=0;i<8;i++){P0=table5[i];P1=table5[i];P2=table5[i];P3=table5[i];delay(z);}}void lsd10(){uchar a,i,j;a=0xfe;P0=a;P1=a;P2=a;P3=a;delay(z);for(i=0;i<7;i++) //仅单个灯亮从上往下流{a=_crol_(a,1);P0=a;P1=a;P2=a;P3=a;delay(z);}for(j=0;j<7;j++) //仅单个灯亮从上往下流{a=_cror_(a,1);P0=a;P1=a;P2=a;P3=a;delay(z);}P0=f;P1=f;P2=f;P3=f;delay(z);}void lsd11(){uchar a,i,j;a=0xfe;P0=a;P1=a;P2=a;delay(z);for(i=0;i<7;i++){a=a<<1;P0=a;P1=a;P2=a;P3=a;delay(z);}for(j=0;j<8;j++){P0=table1[j]; P1=table1[j];P2=table1[j];P3=table1[j];delay(z);}void lsd12(){uchar a,i,j,k,l;a=0xfe;P0=a;P1=a;delay(z);for(i=0;i<7;i++) {a=a<<1;P0=a;P1=a;delay(z);}a=0x7f;P2=a;P3=a;delay(z);for(j=0;j<7;j++) {a=a>>1;P2=a;P3=a;delay(z);}for(k=0;k<8;k++) {P2=table3[k];P3=table3[k]; delay(z);}for(l=0;l<8;l++) {P0=table1[l];P1=table1[l]; delay(z);}while(1);}。
单片机编程全集(含源代码)
前言 (2)基础知识:单片机编程基础 (2)第一节:单数码管按键显示 (4)第二节:双数码管可调秒表 (6)第三节:十字路口交通灯 (7)第四节:数码管驱动 (9)第五节:键盘驱动 (10)第六节:低频频率计 (15)第七节:电子表 (18)第八节:串行口应用 (19)前言本文是本人上课的一个补充,完全自写,难免有错,请读者给予指正,可发邮件到ZYZ@,或郑郁正@中国;以便相互学习。
结合课堂的内容,课堂上的部分口述内容,没有写下来;有些具体内容与课堂不相同,但方法是相通的。
针对当前的学生情况,尽可能考虑到学生水平的两端,希望通过本文都学会单片机应用。
如果有不懂的内容,不管是不是本课的内容,都可以提出来,这些知识往往代表一大部分同学的情况,但本人通常认为大家对这些知识已精通,而在本文中没有给予描述,由此影响大家的学习。
对于这些提出问题的读者,本人在此深表谢意。
想深入详细学习单片机的同学,可以参考其它有关单片机的书籍和资料,尤其是外文资料。
如果有什么问题,我们可以相互探讨和研究,共同学习。
本文根据教学的情况,随时进行修改和完善,所以欢迎同学随时注意本文档在课件中的更新情况。
基础知识:单片机编程基础单片机的外部结构:1、DIP40双列直插;2、P0,P1,P2,P3四个8位准双向I/O引脚;(作为I/O输入时,要先输出高电平)3、电源VCC(PIN40)和地线GND(PIN20);4、高电平复位RESET(PIN9);(10uF电容接VCC与RESET,即可实现上电复位)5、内置振荡电路,外部只要接晶体至X1(PIN18)和X0(PIN19);(频率为主频的12倍)6、程序配置EA(PIN31)接高电平VCC;(运行单片机内部ROM中的程序)7、P3支持第二功能:RXD、TXD、INT0、INT1、T0、T1单片机内部I/O部件:(所为学习单片机,实际上就是编程控制以下I/O部件,完成指定任务)1、四个8位通用I/O端口,对应引脚P0、P1、P2和P3;2、两个16位定时计数器;(TMOD,TCON,TL0,TH0,TL1,TH1)3、一个串行通信接口;(SCON,SBUF)4、一个中断控制器;(IE,IP)针对AT89C52单片机,头文件AT89x52.h给出了SFR特殊功能寄存器所有端口的定义。
51单片机8X8点阵滚动显示 - C51源代码
51单片机8X8点阵滚动显示- C51源代码51单片机8X8点阵滚动显示- C51源代码/*--------------------------------------------------------------*///LED8*8滚动显示//列扫描,低电平有效/*--------------------------------------------------------------*///包含头文件#include <reg52.h>#include "74HC595.H"/*--------------------------------------------------------------*///全局变量定义unsigned char i;unsigned int m,n;/*--------------------------------------------------------------*///代码库#define num sizeof(table) //代码长度unsigned char codeaa[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f}; unsigned char code table[]= {//取模方式阴码列扫描逆向0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,/*" ",0*/0x00,0x7F,0x7F,0x39,0x6F,0x46,0x00,0x00,/*"R",1 */0x00,0x41,0x7F,0x7F,0x41,0x00,0x00,0x00,/*"I",2 */0x00,0x3E,0x7F,0x41,0x63,0x22,0x00,0x00,/*"C",3 */0x00,0x7F,0x7F,0x08,0x7F,0x7F,0x00,0x00,/*"H",4 */0x00,0x7F,0x7F,0x06,0x7F,0x7F,0x00,0x00,/*"M",5 */0x00,0x3E,0x7F,0x41,0x63,0x22,0x00,0x00,/*"C",6 */0x00,0x3F,0x7F,0x40,0x7F,0x3F,0x00,0x00,/*"U",7 */0x00,0x36,0x7F,0x49,0x7F,0x36,0x00,0x00,/*"8",9 */0x00,0x63,0x7F,0x1C,0x7F,0x63,0x00,0x00,/*"X",1 0*/1*/0x00,0x01,0x7F,0x7F,0x01,0x01,0x00,0x00,/*"T",1 3*/0x00,0x7F,0x7F,0x49,0x49,0x41,0x00,0x00,/*"E",1 4*/0x00,0x26,0x6F,0x49,0x7B,0x32,0x00,0x00,/*"S",1 5*/0x00,0x01,0x7F,0x7F,0x01,0x01,0x00,0x00,/*"T",1 6*/0x00,0x7F,0x7F,0x39,0x6F,0x46,0x00,0x00,/*"R",1 8*/0x00,0x61,0x79,0x5D,0x4F,0x43,0x00,0x00,/*"Z",1 9*/0x00,0x08,0x08,0x08,0x08,0x08,0x00,0x00,/*"-",2 0*/0x00,0x62,0x73,0x59,0x4F,0x46,0x00,0x00,/*"2",2 1*/0x00,0x3E,0x7F,0x41,0x7F,0x3E,0x00,0x00,/*"0",2 2*/0x00,0x3E,0x7F,0x41,0x7F,0x3E,0x00,0x00,/*"0",2 3*/4*/0x00,0x7F,0x7F,0x41,0x7F,0x3E,0x00,0x00,/*"D",2 6*/0x00,0x7F,0x7F,0x49,0x49,0x41,0x00,0x00,/*"E",2 7*/0x00,0x7F,0x7F,0x06,0x7F,0x7F,0x00,0x00,/*"M",2 8*/0x00,0x7F,0x7F,0x41,0x7F,0x7F,0x00,0x00,/*"O",2 9*/0x00,0x26,0x6F,0x49,0x7B,0x32,0x00,0x00,/*"S",3 1*/0x03,0x07,0x7C,0x7C,0x07,0x03,0x00,0x00,/*"Y",3 2*/0x00,0x26,0x6F,0x49,0x7B,0x32,0x00,0x00,/*"S",3 3*/0x00,0x01,0x7F,0x7F,0x01,0x01,0x00,0x00,/*"T",3 4*/0x00,0x7F,0x7F,0x49,0x49,0x41,0x00,0x00,/*"E",3 5*/0x00,0x7F,0x7F,0x06,0x7F,0x7F,0x00,0x00,/*"M",3 6*/0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,/*" ",37*/};/*--------------------------------------------------------------*///显示函数void Display(void){Ser_IN((aa[i])); //列扫描数据Ser_IN(table[i + n]); //查表取出行扫描数据Par_OUT(); //输出显示i++; if(i == 8) i = 0; //循环扫描m++; if(m == 500) {m = 0; n++;} //滚动速度控制if(n == num-7) n = 0; //循环显示}/*--------------------------------------------------------------*///定时器初始化void T0_init(void){TMOD = 0xf8;TH0 = 0xcc; //5000usTL0 = 0x00;IE = 0x82;TR0 = 1;}/*--------------------------------------------------------------*///定时器中断服务void T0_intservice(void) interrupt 1 using 0 {TH0 = 0xf8;TL0 = 0xcc;Display();}/*--------------------------------------------------------------*///主函数void main (void){T0_init();while(1);}74HC595.H//Note: 74HC595驱动// __ __//Note: MR 主复位接电源正极, OE 使能端,输出有效接电源负极/*--------------------------------------------* /#ifndef __74HC595_H__#define __74HC595_H__/*--------------------------------------------* /sbit SD = P1^4; //串行数据输入sbit ST_CK = P1^5; //存储寄存器时钟输入sbit SH_CK = P1^6; //移位寄存器时钟输入/*--------------------------------------------*///数码管断码和位码的定义//unsigned char codeseg[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e,0x00,0x ff};//0 1 2 3 4 5 6 7 8 9 a b c d e f 8 无//unsigned char codepos[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};//1 2 3 4 5 6 7 8/*--------------------------------------------* ///函数声明void Ser_IN(unsigned char Data); //串行数据输入void Par_OUT(void); //串行数据输出//void Ser_Par(unsigned char Data); //串行输入,并行输出/*--------------------------------------------* ///串行数据输入void Ser_IN(unsigned char Data)unsigned char i;for(i = 0; i < 8; i++){SH_CK = 0; //CLOCK_MAX=100MHzSD = Data & 0x80;Data <<= 1;SH_CK = 1;}}/*--------------------------------------------* ///并行数据输出void Par_OUT(void){ST_CK = 0;ST_CK = 1;}/*--------------------------------------------* ///串行输入,并行输出/*void Ser_Par(unsigned char Data){Ser_IN(Data);Par_OUT();}*//*--------------------------------------------* /#endif网站统计Powered by Tiki Wiki CMS Groupware | Theme: Fivealive - Lemon。
单片机的温度采集系统 源代码

dat=DS;
i=8;while(i>0)i--;
return(dat);
}
void tmpwritebyte(uchar dat) //写一个字节到DS18B20里
{
uint i;uchar j;bit testb;
for(j=1;j<=8;j++)
temp=tt*10+0.5; //放大十倍,将小数点后第一位转换为可显示数字,再四舍五入
return temp;
}
uchar tmpread(void) //读一个字节
{
uchar i,j,dat;
dat=0;
for(i=1;i<=8;i++)
{
j=tmpreadbit();
#include <reg52.h>
#include <intrins.h>
#define uchar unsigned char
#define uint unsigned int
sbit DS=P3^3; //定义DS18B20接口
int temp; //全局温度变量
{
dsreset(); //初始化DS18B20
tmpwritebyte(0xcc); //跳过序列号命令
tmpwritebyte(0x44); //发送温度转换命令
}
int tmp() //获得温度
{
float tt;uchar a,b;
dsreset();
{
P2=0; //LED段选,共阴极 送1点亮某段
51单片机C语言程序设计源代码
新概念51单片机C语言教程----入门、提高、开发、拓展全攻略郭天祥编著电子工业出版社例2.2.1编写程序,点亮第一个发光二极管(part2_1.c P27)#include <reg52.h> //52系列单片机头文件sbit led1=P1^0; //声明单片机P1口的第一位void main() //主函数{led1=0; /*点亮第一个发光二极管*/}例2.2.2编写程序,点亮P1口的若干二极管(part2_2.c P39)#include <reg52.h> //52系列单片机头文件void main() //主函数{P1=0xaa;//while(1);}例2.5.1利用for语句延时特性,编写第一个发光二极管以间隔1S亮灭闪动的程序(part2_3.c P42)#include <reg52.h> //52系列单片机头文件#define uint unsigned int //宏定义sbit led1=P1^0; //声明单片机P1口的第一位uint i,j;void main() //主函数{while(1) //大循环{led1=0; /*点亮第一个发光二极管*/for(i=1000;i>0;i--) //延时for(j=110;j>0;j--);led1=1; /*关闭第一个发光二极管*/for(i=1000;i>0;i--) //延时for(j=110;j>0;j--);}}- 2 - 例2.6.1编写程序使第一个发光二极管以间隔500ms亮灭闪动。
(part2_4.c P48)#include <reg52.h> //52系列单片机头文件#define uint unsigned int //宏定义sbit led1=P1^0; //声明单片机P1口的第一位void delay1s(); //声明子函数void main() //主函数{while(1) //大循环{led1=0; /*点亮第一个发光二极管*/delay1s(); //调用延时子函数led1=1; /*关闭第一个发光二极管*/delay1s(); //调用延时子函数}}void delay1s() //子函数体{uint i,j;for(i=500;i>0;i--)for(j=110;j>0;j--);}例2.7.1编写程序使第一个二极管以亮200ms、灭800ms的方式闪动。
超声波流量计(MSP430单片机)源代码

85 93 00 00 02 34 39 43 01 3C 09 43 3A 45 28 45
09 3C 85 93 00 00 03 34 3A 43 39 43 02 3C 09 43
@8280
@1000
FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF FF
01 30 2B D3 39 40 7F FF 19 D1 02 00 3A 43 E5 3F
3B 40 06 00 F7 3F 37 45 38 45 35 49 36 49 47 93
@8200
09 30 45 93 0E 30 05 97 02 20 06 98 0C 24 09 28
@8500
A8 7E F2 7D 90 90 A0 7E A0 7E 07 28 90 40 98 7E
E4 7D 90 40 92 7E 92 7E 04 3C 90 53 8C 7E 90 53
D4 7D 35 40 F4 02 B0 12 7E 82 A0 41 C8 7D 90 41
11 2C 10 30 1C 83 F6 23 3C 41 4C 93 02 34 35 D0
@8380
00 80 11 12 02 00 81 47 06 00 81 46 04 00 81 45
02 00 17 3F 35 40 99 79 36 40 99 99 37 40 99 99
单片机编程全集(含源代码)
单片机编程全集(含源代码)单片机编程全集(含源代码)引言:单片机编程是一门重要的技术,它在各个行业中都有广泛的应用。
本文将介绍单片机编程所需的基础知识、常用的编程语言和相关的实例代码,以及如何进行单片机的调试和测试。
一、单片机编程基础知识1.1 单片机概述单片机是一种集成电路,它集成了中央处理器、存储器和输入输出设备等功能单元。
它具有体积小、功耗低、成本低等优点,适用于各种嵌入式系统中。
1.2 单片机体系结构单片机的体系结构包括CPU、存储器、输入输出端口、计时/计数器等模块。
理解单片机的体系结构对于编程非常重要。
1.3 常用的单片机常见的单片机有AT89S52、STM32F103C8T6等,它们具有不同的性能和功能特点。
选择适合自己项目需求的单片机是编程的第一步。
二、单片机编程语言2.1 汇编语言汇编语言是一种低级语言,直接操作单片机的寄存器和内存。
虽然难以学习和理解,但它可以精确控制硬件。
2.2 C语言C语言是一种高级语言,易于学习和使用,可以编写出高效的代码。
许多单片机开发板都支持C语言编程,方便开发者进行开发。
2.3 基本编程指令无论是汇编语言还是C语言,都有一些基本的编程指令,如赋值、条件判断、循环等。
掌握这些指令对于编程非常关键。
三、单片机编程实例3.1 LED闪烁通过编程控制单片机的GPIO口,可以实现LED灯的闪烁效果。
代码如下:```c#include <reg52.h>void Delay(unsigned int t){while(t--);}void main()while(1){P1=0xFF; // 点亮LED灯Delay(60000);P1=0x00; // 关闭LED灯Delay(60000);}}```3.2 温度检测通过连接温度传感器到单片机的模拟输入引脚,可以实现对环境温度的检测。
代码如下:```c#include <reg52.h>sbit AD = P2^0; // 温度传感器连接的引脚void Delay(unsigned int t){while(t--);void main(){unsigned int temp;while(1){temp = AD; // 读取温度传感器的值if(temp > 50){P1=0xFF; // 温度超过50度时点亮LED灯 }else{P1=0x00; // 温度低于50度时关闭LED灯 }Delay(60000);}}```四、单片机的调试与测试4.1 调试工具常用的单片机调试工具有Keil、IAR等,它们提供了仿真功能,可以在计算机上模拟单片机的运行。
stm32 usart例程源代码

stm32 usart例程源代码STM32是一款非常流行的32位单片机系列,其中USART(通用同步异步收发器)是一种常用的串口通信接口。
本文将为您介绍STM32 USART的例程源代码,并详细解释代码的功能。
请注意,由于字数限制,例程源代码将只涉及USART的基本功能,不会包含特定的硬件驱动或应用场景。
以下是一个简单的USART发送数据的例程源代码:```C#include "stm32f10x.h"void USART1_init(void){//启用USART1时钟RCC->APB2ENR |= RCC_APB2ENR_USART1EN;//配置USART1的GPIO引脚GPIOA->CRH &= ~(GPIO_CRH_MODE9 | GPIO_CRH_CNF9); //清除MODE9和CNF9位GPIOA->CRH |= GPIO_CRH_MODE9_1 | GPIO_CRH_CNF9_1; //设置MODE9为输出模式,CNF9为推挽模式//设置波特率为115200USART1->BRR = 0x1D4C;//使能USART1发送器USART1->CR1 |= USART_CR1_TE;//使能USART1USART1->CR1 |= USART_CR1_UE;}void USART1_sendChar(char c){//等待发送完毕while(!(USART1->SR & USART_SR_TC));//发送字符USART1->DR = c;}int main(void){USART1_init();char* message = "Hello, world!"; while(1){//逐个发送字符int i = 0;while(message[i] != '\0'){USART1_sendChar(message[i]);i++;}}}```以上例程包含了初始化USART1和发送字符串的函数,并在无限循环中不断发送一个字符串。
51单片机控制LCD液晶1602源代码

void Lcd1602_Clear_All(void);
void Lcd1602_Demo1(void);
void Lcd1602_Demo2(void);
void Delay_ms(unsigned char second);
if(++row==3)
return;
else
{
switch(row)//这种结构保持以后升级到多行显示液晶
_nop_();
LCD_EN=HIGH ;
_nop_();
LCD_EN=LOW;
LCD_DATA_PORT=0xFF; //prevent port is 0.
}
//===========================
case 2:Lcd1602_Write_Command(0x80+0x40);break; //将数据地址指针定位到第二行
default: break;
}
}
//==================================================
{
while(1)
{
Lcd1602_Demo1();
// Lcd1602_Demo2();
}
}
void Lcd1602_Ini(void)
{
Delay_ms(20);
Lcd1602_Write_Command_Nocheck(0x38);//设定LCD为16*2显示,5*7点阵,8位数据接口
{
Lcd1602_Write_String(row,column," ");
单片机流水灯汇编语言源代码大全(六款流水灯汇编语言源代码)
ORG 0
MOV R1,#3
LOOP1:MOV R0,#8
MOV A,#11111110B
LOOP2:MOV P0,A
RL A
CALL D200MS
DJNZ R0,LOOP2
DJNZ R1,LOOP1
MOV A,#00000000B
MOV P0,A
MOV P2,#0FFH
LOOP:MOV A,P2
ORG 0000H
JMP main
ORG 0003H
JMP int_0
main:
SETB IT0
SETB EX0
SETB EA
MOV A,#11111110B
s:RL A
MOV P2,A
CALL delay
JMP s
delay:
MOV R7,#100
d3:MOV R6,#200
d2:MOV R5,#250
ORG 0000H
MOV R0,#11111110B
start:MOV A,#11111110B
MOV P2,A
s:CALL delay
RL A
MOV P2,A
CALL delay
CJNE A,#01111111B,s
MOV A,R0
MOV P1,A
RL A
MOV R0,A
JMP start
delay:MOV R5,#100
CPL A
MOV P0,A
JMP LOOP
D200MS:
MOV R7,#250
D1:MOV R6,#200
D2:MOV R5,#2
DJNZ R5,$
DJNZ R6,D2
DJNZ R7,D1
stc单片机hhc595源代码

stc单片机hhc595源代码摘要:I.简介- 介绍STC单片机和HHc595- 示例代码目的II.硬件连接- STC单片机与HHc595的连接- LED灯的连接III.程序设计- 初始化代码- 控制LED灯闪烁的代码IV.测试与总结- 测试过程- 总结正文:I.简介STC单片机是一款基于Flash存储器的单片机,具有高性能、低功耗、多功能、易扩展等特点。
HHc595是一款8位串行输入、并行输出的移位寄存器,可扩展微控制器的I/O口。
本示例代码将展示如何使用STC单片机控制一个LED灯的闪烁。
II.硬件连接1.将STC单片机与HHc595相连接。
2.将LED灯的正极连接到HHc595的数据输出(DOUT),负极连接到地(GND)。
III.程序设计1.初始化代码```c#include <reg52.h>#include <intrins.h>sbit led = P2^0; // 定义LED灯连接的P2.0引脚void delay(unsigned int ms) // 延时函数{unsigned int i, j;for (i = ms; i > 0; i--)for (j = 110; j > 0; j--);}void main(){P2 = 0xfe; // 初始化P2口,全部输出低电平while (1){led = 0; // 点亮LED灯delay(500); // 延时500msled = 1; // 熄灭LED灯delay(500); // 延时500ms}}```2.控制LED灯闪烁的代码在主函数中,我们使用一个循环来控制LED灯的闪烁。
首先,点亮LED 灯,然后延时500ms,接着熄灭LED灯,最后再延时500ms。
这样,LED灯就会以每秒1Hz的频率闪烁。
IV.测试与总结将编写好的程序烧写到STC单片机后,观察LED灯是否按照预期的方式进行闪烁。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
num=0;
while(1)
{
p2_0=num;
}
}
void int_1()interrupt 3
{
unsigned char n;
TH1=0x3c;
TL1=0xb0;
TR1=1;
n++;
if(n==10)
{
num=~num;
n=0;}
}
左右跑马灯
for(j=255;j>0;j--);
}
二进制加法实验
#include<reg52.h>
void delay(unsigned int i);//声明延时 函数
main()
{
unsigned char Num=oxff;
while(1)
{
p2=Num;
delay(1000);
#include<Function.h>
bit ISendstr(unsigned char sla,unsigned char suba,unsigned char *s,unsigned char no)
{
unsigned char i;
start_12c();//启动总线
sendByte(sla);//发送器件地址
SendByte(suba);//发送器件子地址
if(ack==0)return(0);
for(i==o;i<no;i++)
{
SendByte(*s);//发送数据
if(ack==0)return(0);
s++;
}
Stop_12c();//结束总线
return(1);
}
bit IRcvsrt(unsigned char sla,unsigned char suba,unsigned char *s,unsigned char no)
Ack_12c(0);//发送就答位
s++;
}
*s=RcvByte();
Ack_12c(1);//发送非应位
Stop_12c();//结束总线
return(1);
}
LED闪烁的简单实验
#include<reg51.h>
void delay(unsigned int i);
main()
}
}
main()
{
unsigned char LED;
LED=0xfe;
p2=LED;
while(1)
{
delayms(250);
LED=_crol_(LED,1);//循环右移一位,点亮下一个LED,此函数为库函数
p2=LED;
}
}
中断方式闪烁
#include<reg51.h>
{
unsigned char j;
for(i;i>o;i--)
for(j=255;j>0;j--);
}
LED=LED | 0x01;
if(LED==0x7f) break;//提前退出for循环
}
for(i=0;i<8;i++)
{
p2=LED;
delay(500);
LED=LED>>1;
LED=LED | 0x80;
}
}
}
void delay(unsigned int i)
if(p2==0x00)
{LED=0xfe;}
}
}
跑马灯程序:
#include<reg51.h>
#include<intrins.h>
void delayms(unsigned char ms)
{
unsigned char i;
while(ms--)
{for(i=0;i<120;i++);
#include<reg52.h>
void delay(unsigned int i);
char LED;
main()
{
unsigned char i;
while(1)
{
LED=oxfe;
for(i=0;i<8;i++)
{
p2=LED;
delay(500);
LED=LED<<1;//左移
{
unsigned char i;
Start_12c();//启动总线
SendByte(sla);//发送器件地址
if(ack==0)return(0);
SendByte(suba);//发送器件子地址
if(ack==0)return(0);
for(i=0;i<no-1;i++)
{*s=RcvByte();//发送数据
void delay(unsigned int i);//声明延时函数
int num;
sbit p2_0=p2^0;
main()
{
TMOD=0x10;//定时器1的中断方式1
EA=1;//开启总中断
ET1=1;//开启定时器中断1
TH1=0位附初值
{
while(1){
p2=0x00;//置p0口为低电平
delay(600);//调用延时子程序
p2=0xff;//置p1口为高电平
delay(600);
}
}
void delay(unsigned int i)
{
unsigned char j;
for(i;i>0;i--)
Num--;
}
}
void delay(unsigned int i)
{unsigned char j;
for(i;i>0;i--)
for(j=255;j>0;j--);
}
LED流水灯
#include<reg51.h>
#include<intrins.h>
void delayms(unsigned char ms)
{unsigned char i;
while(ms--)
{
for(i=0;i<120;i++);
}
}
mian()
{unsigned char LED;
LED=0xfe;
while(1)
{
p2=LED;
delayms(250);
LED=LED<<1;//循环右移一位,点亮下一个LED