声呐探测作业指南
水域救援声呐作业指南电子版
水域救援声呐作业指南电子版英文回答:Water Rescue Sonar Operation Guide.Introduction:Water rescue sonar is a crucial tool used in search and rescue operations in water bodies. This guide aims to provide instructions on how to effectively operate a water rescue sonar.1. Equipment Preparation:Ensure that the sonar device is in good working condition and all components are properly connected.Check the battery level and charge it if necessary.Familiarize yourself with the control panel andunderstand the functions of each button or knob.2. Sonar Deployment:Choose an appropriate location to deploy the sonar, preferably near the area of interest or where the victim is suspected to be.Lower the sonar device into the water, ensuring that it is securely attached to the boat or any other floating platform.Adjust the depth settings according to the water depth and the search area.3. Sonar Operation:Activate the sonar device and wait for it to initialize.Adjust the frequency and gain settings to optimize the sonar image quality.Interpret the sonar display to identify any potential targets or anomalies underwater.Use the zoom function to focus on specific areas of interest.Mark any potential targets or areas of interest on the sonar display for further investigation.4. Search Techniques:Conduct a systematic search pattern, such as a grid or spiral pattern, to cover the entire search area.Maintain a slow and steady speed to ensure accurate sonar readings.Pay attention to any changes in the sonar display, such as sudden depth variations or unusual shapes, which may indicate the presence of a victim or obstacles.5. Communication and Coordination:Maintain constant communication with other rescue team members to ensure effective coordination.Share sonar findings and observations with the team to facilitate decision-making.Follow any specific protocols or procedures established by the rescue organization.Conclusion:Water rescue sonar is a valuable tool in search and rescue operations. By following the guidelines provided in this operation guide, rescue teams can enhance their chances of locating and rescuing victims in water bodies.中文回答:水域救援声呐作业指南。
美国海军声纳教程
SS 潜艇声纳操作指南(2008-08-04 00:35:30)转载标签:分类:舰船资料空愁居历史文化杂谈舰船军事武器装备前言作为一个声呐操作员,你将从事一项最重要的工作。
在敌方水域巡逻时,同船水手们的生命也许就掌握在你手中。
你必须熟悉你的设备和它能做什么。
你必须能识别和了解你听到的声音。
你必须能像驾驶小汽车一样操作调节——机械毋须思考。
这些东西中大部分你都无法从书中学到。
你只有长时间亲自操作设备练习才能精通。
然而,一些特定的背景知识将帮你准备好以充分利用你的练习时间。
手册提供那些背景知识全是纯粹的要点。
你用心能完全熟悉,一页一页彻底学会。
这份出版物的原稿由哥伦比亚大学战争研究部在康涅狄格州纽伦敦强布尔堡合众国海军水下声学实验室完成。
插图由合众国海军训练支持发展中心提供。
二、相对方位和绝对方位方位是显示另一艘船或目标方向的数字。
了望员通过目视,值班军官通过潜望镜,声呐操作员通过听音设备都可以获得方位。
接触目标后,声呐操作员连续不断报告目标方位。
因此,他必须清楚方位表示什么,如何读取和报告。
相对方位声呐操作员通常报告相对方位,因为它们表示与本艇相关的方向。
假设从潜艇中心延伸出两条线:第一条通过艇艏向前,第二条指向目标。
从第一条线沿顺时针方向测量出的这两条线之间的角度就是相对方位。
艇艏正前方目标相对方位000度。
因为一个圆周360度,艇艉正后方相对方位180度。
这三个图显示相对方位50度、160度和240度。
绝对方位声呐操作员也可能被命令报告目标的绝对方位。
假设从潜艇中心延伸出两条线:第一条指向北极,第二条指向目标。
从第一条线沿顺时针方向测量出的它们之间的角度就是绝对方位。
无论潜艇航向多少,潜艇正北的目标绝对方位000度,正东绝对方位090度,正南绝对方位180度,正西绝对方位270度。
只有当本艇航向正北时,目标的相对方位和它的绝对方位才相同。
注意下图如何测量绝对方位。
读取方位指示器下面是一张方位指示器的图。
侧扫声呐-69页精品文档

强反射 弱反射 正常反射 反射阴影
22
2、形成原因 2019/9/21
物质组成的影响 地形影响
23
•物质组成的影响
海面
海水
声呐拖体
海底
沉积物
Ar RAi
R 2V 2 1V 1 2V 2 1V 1
发射的声波在到达海底前,穿过的 是水体。若水体均匀,无声阻抗界 面,则无反射波。
垂 直 波 束 角
覆盖宽度太小,探测效率低
具有较高的工作频率 (几十KHz——几千KHz)
水体相对均匀,对波的吸收也较少 频率高的波探测分辨率较高
防止泥面下地层回波的干扰
三、侧扫声呐图谱内容
直达波 海面线 海底线 海底反射
海面上物体 水体中物体 甚至近海底地层中的物体
21
四、图谱的识别 2019/9/21
测线方向
测线组数量
设计的依据:工作目的、海底情况、调查区形态等 设计的原则:准确、高效、易操作性等
测线间距
平行测线间的距离
设计原则:满足规程或实现目标要求,高效。
设计依据:规程或实现目标要求,设备情况、水深情况、水体混浊度等。
•拖曳方式的选择
调查船固 定安装
适应的环境 浅水
优点 安全
侧拖
浅水
安全
尾拖
难度较大
•探测规范
地质调查 物体寻找
下达的技术要求 国家规范 行业规程
特殊现象探查
没有规范
•测线布设
测线:实现探测目的(一般为测区全覆盖探测),探测设备所需
要的航行探测路径。
计划测线:实现探测目的(一般为测区全覆盖探测),规划
的探测设备应航行的探测路径。
侧扫声纳标准
侧扫声纳标准《侧扫声纳标准,探索海洋的秘密法宝!》嘿,朋友们!你们知道吗?在那广阔神秘的海洋世界里,侧扫声纳就像是一位超级侦探,而侧扫声纳标准呢,那就是这位侦探的行动指南!要是没有它,那可就像在茫茫大海中没有指南针的船只,晕头转向还不知道要驶向何方呢!不了解这个侧扫声纳标准,你对海洋的探索就像没头苍蝇一样,到处乱撞还找不到宝藏的影子!“声纳精度大作战:分毫必究才是真”在声纳精度的世界里,可不能有一丝马虎呀!就像射击比赛一样,差之毫厘谬以千里。
侧扫声纳的精度就如同我们手中的武器,必须要精益求精,分毫必究!这可不是开玩笑的,想象一下,如果声纳精度不准确,那我们就像是戴着模糊眼镜看世界,看到的东西都是模模糊糊的,还怎么能准确找到我们想要的海洋信息呢?比如说在探测海底地形的时候,如果精度不够,可能就会把一个小山丘看成平地,那可就闹大笑话啦!所以呀,一定要保证声纳精度,这才是探索海洋的正确打开方式嘛!“频率选择有诀窍:高低搭配才完美”哎呀呀,这频率选择可真是一门大学问呢!就好像我们听音乐,高音低音要搭配得恰到好处,才能奏出美妙的乐章。
侧扫声纳的频率也是如此呀!高频率就像是海洋中的“千里眼”,能看清细小的物体和细节;低频率呢,则像“广角镜”,能覆盖更大的范围。
你可不能只偏爱其中一个,要高低搭配才完美呢!比如说在寻找沉船的时候,先用低频率大致确定范围,再用高频率去仔细搜索,这样才能事半功倍呀!不然的话,就像只拿着放大镜或者只拿着望远镜,都不能全面地了解海洋的秘密呢!“数据处理要细心:马虎一点都不行”嘿,这数据处理可不能马虎呀!就像拼图一样,每一块都要放对位置,才能呈现出完整的画面。
侧扫声纳的数据处理就是要把那些杂乱无章的数据整理得井井有条,找出其中的规律和信息。
这可不是随随便便就能做好的,需要我们细心再细心!如果数据处理出了差错,那可就像是搭积木的时候放错了一块,整个结构都可能会倒塌呢!比如说在分析海底地貌的时候,一个错误的数据可能会让我们误以为那里有一座山,结果跑过去一看,啥都没有,那不是白跑一趟嘛!好啦,这就是侧扫声纳标准的几个关键要点啦!朋友们,一定要记住这些标准呀,它们可是我们探索海洋的秘密武器呢!有了它们,我们就能在海洋世界里畅游无阻,发现更多的奥秘和惊喜!让我们一起朝着这些标准努力吧,成为海洋探索的“超级英雄”,去征服那片广阔而神秘的蓝色领域!绝绝子呀,相信我们一定可以做到的!。
水域救援声呐作业指南电子版

水域救援声呐作业指南电子版英文回答:Water Rescue Sonar Operation Guide.Introduction:Water rescue sonar is an essential tool used in search and rescue operations in water bodies. This guide provides detailed instructions on how to effectively operate a water rescue sonar device.1. Equipment Preparation:Before using the water rescue sonar, ensure that all equipment is in good working condition. Check the sonar device, cables, and power supply for any damages or faults. Make sure the batteries are fully charged or havesufficient power.准备工作:在使用水域救援声呐之前,确保所有设备都处于良好的工作状态。
检查声呐设备、电缆和电源是否有任何损坏或故障。
确保电池充满电或有足够的电量。
2. Sonar Deployment:Choose an appropriate location to deploy the sonar device. Ideally, it should be near the area where the rescue operation will take place. Attach the sonar device to a sturdy pole or mount it on a boat. Ensure that the sonar transducer is fully submerged in the water.声呐部署:选择一个合适的位置部署声呐设备。
声呐相关实验-实验指导
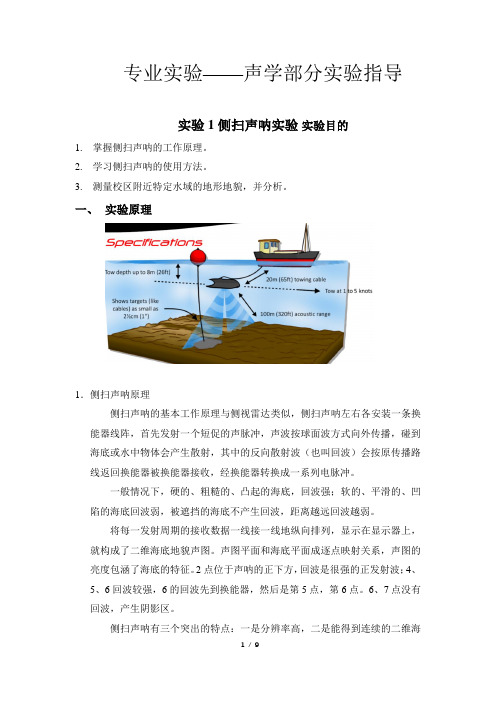
专业实验——声学部分实验指导实验1 侧扫声呐实验实验目的1.掌握侧扫声呐的工作原理。
2.学习侧扫声呐的使用方法。
3.测量校区附近特定水域的地形地貌,并分析。
一、实验原理1.侧扫声呐原理侧扫声呐的基本工作原理与侧视雷达类似,侧扫声呐左右各安装一条换能器线阵,首先发射一个短促的声脉冲,声波按球面波方式向外传播,碰到海底或水中物体会产生散射,其中的反向散射波(也叫回波)会按原传播路线返回换能器被换能器接收,经换能器转换成一系列电脉冲。
一般情况下,硬的、粗糙的、凸起的海底,回波强;软的、平滑的、凹陷的海底回波弱,被遮挡的海底不产生回波,距离越远回波越弱。
将每一发射周期的接收数据一线接一线地纵向排列,显示在显示器上,就构成了二维海底地貌声图。
声图平面和海底平面成逐点映射关系,声图的亮度包涵了海底的特征。
2点位于声呐的正下方,回波是很强的正发射波;4、5、6回波较强,6的回波先到换能器,然后是第5点,第6点。
6、7点没有回波,产生阴影区。
侧扫声呐有三个突出的特点:一是分辨率高,二是能得到连续的二维海底图像,三是价格较低。
其应用主要有海洋测绘和海洋地质调查(1)海洋测绘侧扫声呐可以显示微地貌形态和分布,可以得到连续的有一定宽度的二维海底声图,而且还可能做到全覆盖不漏测,这是测深仪和条带测深仪所不能替代的,所以港口、重要航道、重要海区,都要经过侧扫声呐测量。
(2)海洋地质调查侧扫声呐的海底声图可以显示出地质形态构造和底质的大概分类,尤其是巨型侧扫声呐,可以显示出洋脊和海底火山,是研究地球大地构造和板块运动的有力手段。
2.侧扫声呐参数说明1)、工作频率侧扫声呐一般工作在50 kHz-1. 2 MHz,较低的工作频率可以有较大的探测距离,而较高的工作频率能在有限长度的传感器尺寸下得到高的角度分辨力。
一般100 kHz左右的声呐作用距离可达600 m, 500 kHz左右的声呐工作距离为150 m左右。
2)、传播损失传播损失TL (dB>:水声传播损失主要计及球面拓展损失和吸收损失。
如何使用声呐在深海搜索飞机残骸

3月8日,马来西亚MH370航班失联后,多国开始展开历史上最大规模的国际搜救行动。
3月23日,马来西亚总理召开新闻发布会,正式向世界宣布MH370坠落在南印度洋海域。
由于该海域搜寻范围之广、难度之大前所未有,中国动用21颗民用与军用卫星参加搜救,中国海军先中可用于军事或间谍侦察任务的卫星总量超过100颗,大部分都负有对世界热点地区特别是东亚地区侦察的任务。
如美国“大鸟”照相侦察间谍卫星上的画幅式照相机,从160公里高空拍摄的照片,竟能分辨出地面上0.3米大小的物体,也就是说能看清到底是一只狗还是一1906年由英国海军的李维斯·理察森发明,一战时开始应用于战场,主要用来侦测潜藏在水底的潜水艇。
当时,声呐只能被动听音,属于被动声呐,或者叫做“水听器”。
1915年,法国物理学家与俄国电气工程师合作发明了第一部用于侦测潜艇的主动式声呐设备。
1916年,加拿大物理军 事 纵 横孙立华 编译MH370疑似物发现海域太平洋吉隆坡珀斯2500公里如何使用声呐在深海搜索飞机残骸. All Rights Reserved.电源坠机残骸记忆器接口控制器黑匣子不是黑色,而是橘红色,便于飞机失事时寻找黑匣子具有较强的抗火、耐压、耐冲击震动、耐海水浸泡、抗干扰等能力示意图闪存保温块水下定位器信标1、舱声记录器。
可以保留停止记录前30分钟的驾驶舱内的各种声音2、飞行数据记录器。
记录飞行中的各种参数,如飞机的高度、速度、姿态、油量等,记录的时间范围是最后的25小时黑匣子是判断飞行故障原因的重要及直接证据,正式的名称叫飞行记录器美国拖曳声波定位仪. All Rights Reserved.。
海洋生物的声纳探测了解它们的导航技巧
海洋生物的声纳探测了解它们的导航技巧海洋生物的声纳探测:了解它们的导航技巧海洋生物在水中生活,借助声纳探测来进行导航,这是它们生存和繁衍的重要技巧。
声纳探测可以帮助海洋生物感知周围环境、追踪猎物以及避免潜在的威胁。
本文将探讨海洋生物利用声纳探测的技巧和适应策略。
一、声纳探测的原理声纳是一种通过声音波浪在水中传播和反射的技术。
海洋生物借助声纳探测来产生和接收声波信号。
它们使用内部器官如气囊或骨骼来产生声波,并通过听觉器官接收和解读回声信号。
二、海洋生物的声纳技巧1. 声波定位海洋生物可以通过发送声波来判断周围环境。
它们可以计算声波的传播速度和返回时间,从而精确测量目标物体的距离和方向。
2. 回声识别当声波遇到物体后,会被反射回来,形成回声。
海洋生物可以通过分析回声的特征,如强度、频率和声调的变化来识别物体。
这样,它们可以判断是否是潜在的猎物或威胁。
3. 声纳地图海洋生物可以根据声音的传播路径和回声信号的变化构建声纳地图。
这样,它们可以在复杂的水下环境中定位自己的位置、追踪猎物并且避开障碍物。
三、声纳探测的适应策略1. 生物发出不同频率的声波不同频率的声波在水中传播的距离和速度不同。
海洋生物可以根据需要选择不同频率的声波,以便更好地探测目标物体。
2. 语音模式的变化海洋生物可以通过改变声音的频率、节奏和音调来传达不同的信息。
它们可以发出特定的声音信号来吸引潜在的伙伴或警告对手。
3. 群体声纳一些海洋生物,如鲸鱼和鱼群,利用群体声纳来进行合作狩猎或迁徙。
它们可以通过和其他个体的声波交流来确定行进方向和目标位置。
四、人类利用海洋生物的声纳技巧人类从海洋生物的声纳技巧中受益匪浅。
例如,声纳技术在海洋探测、海洋资源勘测以及海洋工程中起到重要作用。
此外,人们还可以通过观察和研究海洋生物的声纳技巧,进一步增进对海洋生态系统的认识和保护。
总结:海洋生物利用声纳探测来进行导航,展现了其适应水下环境的独特能力。
声纳探测技巧使它们能够感知周围环境、追踪猎物和避开威胁。
侧扫声呐_图像声呐资料

侧扫声呐水下搜救声纳旁侧声纳图像声呐简介品牌:DeepVision 型号:DE680SAR 加工定制:是类型:侧扫声纳外形尺寸:直径60mm*拖鱼长度850mm重量:空气中9kg,水中6.7kg产品用途:水底地貌调查,水下搜救规格:套Deepvision是高性能、低成本侧扫声纳,用于水下综合科考、沉船探测、水下溺水人员搜救、海底地形地貌研究、湖泊海洋测绘等。
Deepvision侧扫声纳可固定在船体(Hull Mount),也可以用作水下拖鱼(Towfish),水下拖鱼最深可用于水下100m。
系统可生成高质量水底图像,适用于各种海底应用和研究。
水下人员搜救需要相对于底部的极其精确的高度,DeepVision最新的DE680 SAR侧扫声纳专为水下人员搜救设计,可提供相对于底部的精确的高度。
DE680S AR侧扫声纳采用Chirp Digital技术,其优异的侧扫分辨率和精确的相对于底部的精确的高度,尤其适用于水下人员搜救等应用。
DE680SAR凭借优异的水下搜救性能,已被瑞典、奥地利、芬兰、加拿大、澳大利亚等国家的消防和搜救部门使用,并且在一次水下搜索中成功找到一具两年前失踪的尸体,之前警方动用其他各种搜救设备均未找到,而使用DE680SAR只用了不到一天的时间。
侧扫声纳拖鱼系统包括水下拖鱼、水面单元、连接电缆、Pelicase存储运输包和数据获取分析处理软件。
船挂侧扫声纳系统包括声呐换能器、水面电源、连接电缆、Pelicase存储运输包、数据获取分析处理软件。
DeepVision侧扫声纳性能特点:优异的图像质量;易于使用;紧凑设计;低成本、高性能。
DeepVision侧扫声纳技术参数:重量:空气中9kg,水中6.7kg;尺寸:直径60mm*拖鱼长度850mm;最长线缆长度:200m;拖鱼接口:RS485,GND,Supply,Fischer 103 DEE 4;软件支持:windows2000、XP、vista系统,支持GPS 输入,NMEA 数据RMC,GSV, 通讯波特率4800 bps;材料:不锈钢,PVC和聚亚安酯。
水声科普知识侧扫声呐基本系统组成和功能
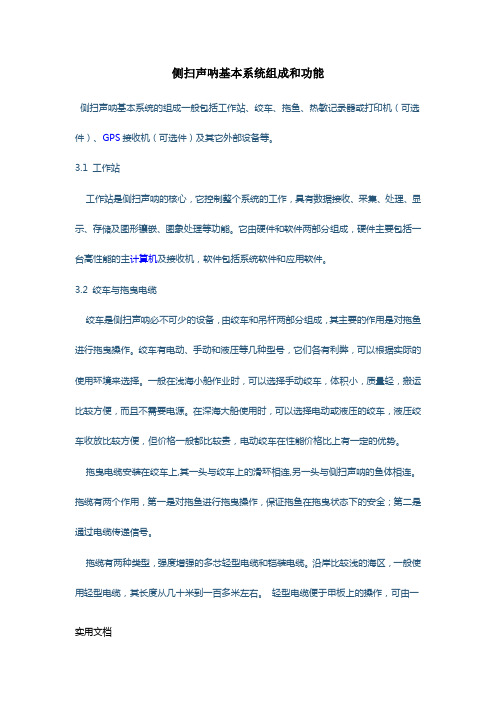
侧扫声呐基本系统组成和功能侧扫声呐基本系统的组成一般包括工作站、绞车、拖鱼、热敏记录器或打印机(可选件)、GPS接收机(可选件)及其它外部设备等。
3.1 工作站工作站是侧扫声呐的核心,它控制整个系统的工作,具有数据接收、采集、处理、显示、存储及图形镶嵌、图象处理等功能。
它由硬件和软件两部分组成,硬件主要包括一台高性能的主计算机及接收机,软件包括系统软件和应用软件。
3.2 绞车与拖曳电缆绞车是侧扫声呐必不可少的设备,由绞车和吊杆两部分组成,其主要的作用是对拖鱼进行拖曳操作。
绞车有电动、手动和液压等几种型号,它们各有利弊,可以根据实际的使用环境来选择。
一般在浅海小船作业时,可以选择手动绞车,体积小,质量轻,搬运比较方便,而且不需要电源。
在深海大船使用时,可以选择电动或液压的绞车,液压绞车收放比较方便,但价格一般都比较贵,电动绞车在性能价格比上有一定的优势。
拖曳电缆安装在绞车上,其一头与绞车上的滑环相连,另一头与侧扫声呐的鱼体相连。
拖缆有两个作用,第一是对拖鱼进行拖曳操作,保证拖鱼在拖曳状态下的安全;第二是通过电缆传递信号。
拖缆有两种类型,强度增强的多芯轻型电缆和铠装电缆。
沿岸比较浅的海区,一般使用轻型电缆,其长度从几十米到一百多米左右。
轻型电缆便于甲板上的操作,可由一实用文档个人搬动。
其负荷一般在400-1000 Kg之间,取决于内部增强芯的尺寸。
铠装电缆用于较深的海区,大部分侧扫声呐铠装电缆是“力矩平衡”的“双层铠装”,这意味着铠装电缆具有两层反方向螺旋绕成的金属套,铠装层可以水密,也可以不水密,由铠装的材料来决定。
不管铠装层水不水密,导线还得由绝缘层来水密。
3.3 拖鱼侧扫声呐的拖鱼是一个流线型稳定拖曳体,它由鱼前部和鱼后部组成。
鱼前部由鱼头、换能器舱和拖曳钩等部分组成;鱼后部由电子舱、鱼尾、尾翼等部分组成。
尾翼用来稳定拖鱼,当它被鱼网或障碍物挂住时可脱离鱼体,收回鱼体后可重新安装尾翼。
拖曳钩用于连接拖缆和鱼体的机械连接和电连接。
Edgetech 4200FS 侧扫声呐简明操作手册

Edgetech 4200FS侧扫声纳简明操作手册美国劳雷工业有限公司2005,6Edgetech 4200FS 侧扫声呐简明操作手册一、系统组成Edgetech 4200FS 测扫声呐系统由以下部分组成:1.4200FS 拖鱼2.4200FS甲板处理器3.拖缆及磁力仪拖曳电缆4.G882磁力探头4200FS甲板处理器4200FS拖鱼4200FS拖鱼和G882磁力仪二、Edgetech 4200FS测扫声呐系统操作步骤(一)系统连接及启动1.打开包装箱,取出甲板单元处理器及显示器,将处理器及显示器安放在平稳的地方;2.连接处理器、显示器、轨迹球(鼠标)、键盘;3.打开4200FS拖鱼包装箱,将拖鱼轻轻放在垫有塑料泡沫的平地上;4.取出拖鱼的两片尾翼(共有4片,2片为备用),呈十字交叉互相插入;用厂家提供的内六角螺丝起子松开4200FS拖鱼尾部的尾翼固定螺丝,将呈十字交叉的2片尾翼插入拖鱼尾部的十字槽中,尾翼到位后,将固定螺丝拧紧,注意不要死拧,感觉一般拉力不会使尾翼脱落就行了。
这样,当尾翼在拖曳中被渔网等海底鄣碍物挂住时,尾翼会脱落从而保证拖鱼能安全拉出水面。
5.将拖缆的航空插头端插入甲板处理器后面的Sea Cable接头(见下图)。
拖缆插头8针脚插头磁力仪9m缆6针脚插头6.将拖缆的另一端插入拖鱼的防水接头中。
如果侧扫声呐和磁力仪要同时拖曳使用,应使用带“Y”型接头的拖缆。
“Y”型缆的一端(6针脚)插入4200FS拖鱼中,另一端(8针脚)插入磁力仪的9m拖缆中,磁力仪9m缆的另一端插入G882磁力仪的防水接头中(见上图)。
7.用卸扣将主拖缆的承重扣和拖鱼的拖曳孔相连,若磁力仪和侧扫同时使用,则将磁力仪的9m缆的拖曳终端固定在4200FS拖鱼的拖把中(见下图)。
8.检查处理器、显示器的适应电源是否是220VAC;9.将甲板处理器(PC工业计算机)前面的电源开关开启,Edgetech 4200FS的系统软件Discover 将自动启动,并进入其界面;10.将甲板单元前面的“Towfish”电源开关开启,等待 1.5-2分钟,当Discover 软件底部的“NET OFF”变为“NET ON”时,系统就准备好了。
第4节 水声探测技术

根据美国国防部的说法,这些事件情况如下: 2009年3月4日,一艘中国渔业局巡逻艇数度利用强力探照灯照射美 国海洋观测船“无瑕号”整个船身。当时无瑕号在距中国海岸231公 里的黄海上作业。这般巡逻艇随后在没有知会或警告的情况下,在无 瑕号正前方约1280公尺处横向通过。 第二天,一架中国Y-12海上侦察机12次以大约122公尺高度、457公 尺的距离飞行经过胜利号。 3月5日,一艘中国巡防舰无预警接近美国“无瑕号”,并在距船首约 91公尺处穿越,不到两小时之后,一艘中国Y-12侦察机以183公尺高 度、30到90公尺的距离11度飞行经过无瑕号。 然后巡防舰再次从无瑕号前方通过,这次距离约366到457公尺,既 未礼让,也不表明意图。 3月7日,一艘中国情搜船利用船上无线电向无瑕号发出挑战,指控无 瑕号非法作业,并要求无瑕号离开那个海域,否则就“承担后果”。 美国国防部3月9日以控诉的口吻指出,五艘中国船只跟踪并危险地接 近美国海军船只,显然企图“骚扰”美军船员。
声呐分为主动声呐和被动声呐。 主动声呐由简单的回声探测仪器演变而来,它主 动地发射超声波,然后收测回波进行计算,适用 于探测冰山、暗礁、沉船、海深、鱼群、水雷和 关闭了发动机的隐蔽的潜艇; 而被动声呐则由简单的水听器演变而来,它收听 目标发出的噪声,判断出目标的位臵和某些特性, 特别适用于不能发声暴露自己而又要探测敌舰活 动的潜艇。
视频:海军高层称我军舰接近测量船行为正当.flv
无暇号事件-对海洋生态的威胁
美国军方“无暇”号间谍船的主要间谍工具是拖曳式高性 能水下阵列声呐,拖缆长约1800米,可以在150到450米 深的水中进行音响作业,以探测和判断水下潜艇的方位及 类型。其声呐的具体情况被美国列入最高度机密,真实工 作情况美军决不会公开。但可以肯定的是,其声呐是当今 世界上最先进的,其功率也是世界上最大的。 美国学者的研究证明,美国海军的普通中频声呐便可以发 出高于235分贝的强大声波,这样的强度和火箭发射升空 差不多,可以使数百英里的海面下为之震荡。而“无暇” 号间谍船上声呐种类更多,功率更大,对海洋生态的危害 也更严重。
海洋声学探测技术
海洋声学探测技术
海洋声学探测技术广泛应用于海洋环境监测、海洋能源开发、海底资源勘探、海战作战决策、海洋生物学研究等领域。
其中,海洋环境监测是应用最为广泛的领域之一,主要包括海洋水文学、海洋气象学、海洋地质学、海洋生物学等方面的研究。
海洋声学探测技术的核心是声呐技术,即利用声波在水中的传播特性,通过声波的反射、折射、散射等现象来测量海水中的物理量和生物信息。
声呐技术主要有单波束声呐、多波束声呐、侧扫声呐、多普勒声呐等多种类型。
海洋声学探测技术需要克服的主要问题是海水的声学特性随着
深度和温度的变化而变化,这对声波的传播和接收造成了影响。
因此,海洋声学探测技术需要对海洋环境进行精确的测量和建模,以便准确地探测和测量海洋中的物理量和生物信息。
海洋声学探测技术的未来发展方向包括提高声呐的探测灵敏度
和分辨率、发展新型的声学传感器、开发基于声学探测的智能化控制系统等。
这些有望为海洋资源开发和利用提供更加精确和可靠的技术手段。
- 1 -。
系列扫描声呐安全操作及保养规程

系列扫描声呐安全操作及保养规程扫描声呐是一种用于测量水中深度、距离和位置的工具。
它在海洋勘探、海岸警卫、水下工程和船舶导航等领域得到了广泛的应用。
为了确保使用扫描声呐的安全和保障设备的正常使用寿命,本文将介绍系列扫描声呐的安全操作和保养规程。
安全操作规程1. 安装检查在使用扫描声呐之前,必须检查其安装是否稳固。
检查包括:•确保设备固定在安装位置,并且不会移动或摇晃;•检查设备的电源是否正常,并检查电缆是否损坏。
2. 操作规程操作扫描声呐应遵循以下规程:•必须使用防护手套和安全靴;•不要接触设备和电源线,以免电击;•不要在雨天或下雪天使用扫描声呐;•不要将设备置于水中,除非设备标明其可在水中使用;•当扫描声呐运作时,不要将手或脚伸入声波范围内。
3. 紧急情况在紧急情况下,必须保持镇静,遵循以下措施:•立即切断电源;•通知有关部门;•对任何受伤的人员提供急救;保养规程1. 经常检查在使用扫描声呐之前,应经常检查设备的状况,包括:•确认电线没有损坏;•确认声纳检测器外壳没有裂缝;•确认声波源和检测器处于正确的位置;•确认声波源和检测器是否合理对准。
2. 清洁保养保养扫描声呐需要注意以下方面:•定期清洁机箱和设备表面;•使用干布,不要使用湿布;•确认清洁剂不会对设备造成损害。
3. 存储方法存储扫描声呐时,需要注意以下事项:•确保设备处于干燥的环境中;•避免存储在有尘土或潮湿的地方;•将设备存储在设备箱或其他保护设备的盒子中。
总结系列扫描声呐是一种广泛应用于海洋勘探、海岸警卫等领域的工具。
为确保安全运作和设备寿命,必须遵循安全操作和保养规程。
本文介绍了安全操作和保养规程的主要内容,希望对于使用扫描声呐的人员有所帮助。
声纳遥测测量的原理与海洋调查应用

声纳遥测测量的原理与海洋调查应用近年来,声纳遥测测量技术在海洋调查领域中得到了广泛应用。
声纳遥测测量是利用声纳设备对目标进行远程测量与探测的一种方法。
它利用声波在水中的传播特性,通过测量声波的传播速度和信号的回波时间来获取有关目标的信息。
本文将介绍声纳遥测测量的原理与海洋调查应用。
一、声纳遥测测量的原理声纳遥测测量基于声波在水中的传播原理。
声波在水中传播的速度受到水温、盐度和水压等影响。
因此,通过测量声波的传播速度,可以推测出水体的温度、盐度和水压等信息。
声纳遥测测量主要分为两个步骤:发射和接收。
首先,声纳设备发射声波脉冲信号。
这些脉冲信号在水中传播,经过一段时间后,会遇到目标物体,如海底地形或水中生物。
然后,信号的一部分会被目标物体反射回来,形成回波信号。
接下来,声纳设备接收并记录这些回波信号。
通过测量回波信号的传播时间和回波信号的强度,声纳设备可以确定目标物体的位置和特征。
传播时间可以用来计算目标物体与声纳设备的距离,而回波信号的强度可以用来推测目标物体的大小或密度等信息。
通过不断发射和接收声波信号,声纳设备可以扫描整个海洋区域,并生成详细的海洋地图或生物分布图。
二、海洋调查中的应用声纳遥测测量在海洋调查中有着广泛的应用。
首先,它被广泛用于海底地形的勘测。
通过测量回波信号的传播时间和强度,声纳设备可以精确地绘制海底地形的图像。
这对于海洋工程、海底资源勘探和航海导航等都有着重要的意义。
此外,声纳遥测测量还可以用于海洋生物调查。
海洋中生物的分布和数量对于生态系统的研究和保护至关重要。
声纳设备可以通过测量回波信号的强度和频率来推测目标物体的大小和密度,从而判断出海洋中的生物种类与数量。
这对于渔业资源管理和环境保护具有重要意义。
此外,声纳遥测测量还可以应用于海洋环境监测。
通过测量海水中的温度、盐度和水压等参数,可以了解海洋环境的变化情况。
这对于气候变化研究和海洋生态系统的保护具有重要意义。
三、声纳遥测测量的挑战与发展趋势尽管声纳遥测测量在海洋调查中的应用前景广阔,但仍然存在一些挑战。
声呐(纳)技术 :第三章 声呐系统的定向方法1

因而测向精度
1 1 1.4
七
二、最大值测向
2.被动接收,视觉指示
由于视觉指示(如电表摆动、幅度大小显示)时,
指示器仅指示相对声压变化,因而
g
U U
D D
1 D
0
代入
D 后
g
1 6
N
d
2
解得
2
6g
Nd
6g 0.39
2
g
一般人的眼睛可感知的相对电压幅度变化为0.05~0.1
1.被动接收,听觉指示 2.被动接收,视觉指示 3.主动测向,视觉指示 4.主动测向,听觉指示
七
二、最大值测向
1.被动接收,听觉指示 一般来说,人耳对声强是敏感的,而声强与声压的 平方成正比,因而
I kD2
故
I 2kD D
声强的相对变化为
I I
2
D D
七
二、最大值测向
设人耳能觉察的(人耳的灵敏度)相对声强变化为
I g I
D 2 D
2
D
0 D D0
2
1
D
0
0
利用 sin x x 1 x3 3!
即可有
D
sin
N
N sin
2
N
2
1 3!
N
N
2
3
1
1 3!
N
2
2
2
2
1
1 6
N
d
2
七二、最大值测向源自代入后得g1 3N
d
2
由此解得
1
3g Nd
3g sin
2
3g 0.276
水闸结构水下机器人及声呐检测项目检测方案
水闸结构水下机器人及声呐检测项目检测方案1项目概况略2检测目的与内容通过对闸室开展水下声呐检测作业,查明并掌握各水闸水下结构现状,为水闸安全评估和日常维护保养工作提供科学依据。
3检测依据根据国家和行业现行的有关技术规范、规程及强制性标准的要求实施。
4检测方法与仪器设备该水闸水下检测使用水下机器人、水下三维声呐检测技术,驾驶水下机器人抵近水下结构进行视频检测,获取水下结构(混凝土表面)的光学影像进而判断结构的缺陷情况;利用水下三维声呐开展水下定点扫测,通过多站位检测数据组合拼接,获取水下结构的三维点云数据,最终实现对水闸设施水下结构的全覆盖检测。
4.1水下检查技术水下机器人在水下具有较强的观察能力,同时可根据多种传感器进行水下定位。
该水下机器人结构紧凑,体积小但功能强大,可满足水利设施水下结构的常规检测,二维图像声呐结构简单,体积小,采用宽频扫描,工作时中心频率750KHz,可清晰地观察到水下结构的缺陷。
水下三维声呐可进行水下全景声呐扫描成像检查,利用声呐穿透表面附着物,生成高分辨率的3D全景图像。
水下三维声呐检测技术的基本工作原理是通过发射和接收声波进行目标测距定位,采用旋转二维面阵的方式,直接采集到目标外形轮廓的水平、垂直、高度三个方向上的数据,同时获得目标物的其他细节描述,并借助三维显示技术,最终生成目标的实时三维立体图像。
4.2检测数据后处理水下机器人采集到的视频数据可在专业的视频软件上播放,通过对缺陷位置的视频进行去噪、滤波等处理获取高清、高质量的水下结构影像,也可以对缺陷进行精确测量,划分缺陷的等级等。
利用专业点云数据后处理软件,不仅可以进行点云数据的清错点、删噪点等测站检测数据后处理工作,还可实现不同测站间检测成果数据的拼接融合;并对最终成果点云数据进行浏览、判读,精确量测异常情况的位置和发育情况。
5预期成果经项目外业测站检测数据后处理和站间后处理数据拼接融合,最终获得水闸水下闸室结构水下声呐检测成果数据,并生成检测成果点云数据模型,根据三维点云成果分析水闸运行现状,包括水下结构有无破损、裂缝、变形、冲刷等情况。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
声呐探测作业指南
下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,
能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!
并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日
记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!
Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help you
solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!
In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts,
other materials and so on, want to know different data formats and writing methods, please pay attention!
声呐探测作业指南
声呐技术是一种通过发射声波并利用回波来探测目标的技术。
它主要
应用在海洋环境中,用于测量水下目标的位置、形状和深度。
声呐探测作业指南旨在帮助操作人员了解声呐探测的基本原理,规范操作流程,提高作业
效率和准确性。
本文将深入探讨声呐探测作业的关键步骤和注意事项,并就常见问题进行解答和分析。
一、声呐探测原理
1. 声波发射与接收
声呐系统通过发射声波,利用声波在水中的传播速度来探测目标。
声波发射器产生高频声波,并将其发送到水下,在目标表面反射后,声波回到接收器。
接收器通过分析回波的时间和强度来确定目标的位置和性质。
2. 声波传播特性
声波在水中传播具有一定的特性,如传播速度、衰减程度等。
了解声波的传播特性有助于选择适当的声呐设备,提高探测效果。
3. 目标反射特性
不同的目标对声波的反射特性各不相同,如硬物体反射强度高、软物体反射强度低等。
根据目标的反射特性可以识别目标的性质和形状。
二、声呐探测作业流程
1. 准备工作
在进行声呐探测作业之前,需要进行充分的准备工作。
包括选择合适的声呐设备、检查设备状态、确定探测区域和目标等。
2. 声呐设备设置
根据探测目标的深度和性质,设置声呐设备的参数。
包括发射频率、接收增益、探测范围等。
3. 探测操作
在设备设置完成后,进行声呐探测操作。
按照预定路线进行探测,保持设备稳定运行,监控回波信号,及时调整设备参数。
4. 数据记录与分析
对探测得到的数据进行记录和分析。
包括回波信号的强度、时间、形状等信息,结合地图和其他数据进行分析,确定目标位置和性质。
5. 结果输出
根据数据分析结果,输出探测报告和图表。
报告包括目标位置、形状、深度等信息,为后续作业提供参考。
三、声呐探测作业注意事项
1. 设备维护
定期检查和维护声呐设备,保持设备状态良好。
避免因设备故障导致探测结果不准确。
2. 操作规范
操作人员要按照操作规范进行声呐探测作业,避免操作失误和设备损坏。
3. 安全防护
声呐探测作业需要在水下环境中进行,操作人员应做好安全防护措施,避免发生意外事故。
4. 数据保护
探测数据是重要的资料,需要做好数据保护和备份工作,防止数据丢失或泄露。
四、常见问题解答
1. 声呐探测如何确定目标的深度?
通过分析回波信号的时间和声波传播速度,可以计算出目标的深度。
同时,结合水下地形和其他信息进行分析,可以提高深度确定的准确性。
2. 声呐探测如何识别目标性质?
根据目标的反射特性和声波回波信号的形状,可以初步判断目标的性质。
如硬物体反射强度高、软物体反射强度低等特点。
3. 声呐探测在水下环境中有哪些挑战?
水下环境中存在水流、水温等各种因素,会影响声波的传播和目标探测。
操作人员需要了解水下环境特点,合理选择声呐设备和参数,提高探测效果。
总结:声呐探测作业指南是声呐探测作业中的重要参考文件,通过了解声呐技术的原理和作业流程,以及注意事项和常见问题解答,可以为声呐探测作业提供指导和参考。
在实际作业中,操作人员应严格按照指南要求进行操作,确保探测结果准确可靠,提高声呐技术在海洋环境中的应用效果。