水域救援声呐作业指南电子版
水域应急救援装备物资配备参考清单

序号装备类型装备名称主要用途1水面救援类防护类水域救援服身体防护2水域救援专业救生衣为救援人员提供浮力,具有快卸部件3水域救援头盔头部和颈部防护4水域救援手套手部防护5水域救援靴小腿部和足部防护6割绳刀快速切割或割除障碍物7高音哨哨声报警和沟通8防水照明灯水域救援作业照明9防水方位灯在黑暗环境中的位置标识10搜救类救生杆为被救人员提供支点11救生圈(球)用于快速抛投给被救人员建立浮力,其技术性能应符合GB/T 4302的要求12救生浮漂为被救人员提供支点13普通救生衣为被救人员提供浮力14水面救援机器人运送被救人员15呼吸面罩为被救人员提供氧气16水域救援抛绳包用于救援人员抛投,增加救援距离,进行拖拽作业17水域救援快速解脱牵引绳可与救援用救生衣的快脱装置配合使用,也可在水域救援中协助拖曳救生艇18水面漂浮救生绳用于水中救援牵引,拖拽被救人员19安全绳用于绳索系统救援,其技术性能应符合XF 494的要求20救生抛投器大跨度救援现场向被救人员抛投救绳索及救生圈等,其技术性能应符合GB/T 27906的要求21可漂浮救生担架被救人员固定及转运、吊运22充气式救援船(艇)、硬底式救援船(艇)运送救援人员与被救人员。
充气式救援船(艇)长度不小于3.8米23舟艇舷外机为救援船只提供动力24舟艇舷外机油箱配合船用外挂机使用提供燃料油25背负式高音扩音器用于救援现场搜索被困人员,发布救援指令26水下救援类防护类潜水气瓶储存高压气体,供潜水员水下呼吸使用27浮力调整器控制水底中性浮力,固定气瓶,连接配件水域应急救援装备物资配备参考清单装备类型装备名称主要用途28水下救援类防护类呼吸调节器将气瓶内的高压气体自动调节至潜水员所在深度相适应的压力,以供潜水员呼吸29全面镜保护潜水员免于呛水,保护眼睛免受水的刺激,并实现水下通话30蛙鞋提供水下前进动力31配重及其配重带增加潜水员的负浮力,帮助下浮32潜水头套头部防护和保温33湿式潜水服身体防护和保温34干式潜水服身体防护和保温35潜水靴足部防护36潜水手套手部防护和防寒保暖37潜水牵引绳直接连接潜水员与信绳员38水中照明灯提供水下照明39搜救类水下声呐对水下目标进行探测、定位和通信40潜水电脑表分析和记录潜水员水下作业情况以及水下深度、温度等变化情况41水下机器人进行水下侦查、水域搜索、水下打捞等作业42破拆类潜水刀用于紧急情况水下破拆43水下破拆工具组在水下进行结构破拆、切割、锚固等44通信类水下通信系统(1)无线通信系统实现水面以下的通信联络,掌握水下潜水员的情况,在需要时及时给予援助;(2)有线通信系统实现潜水员与信绳员的通信联络45冰面救援类防护类冰面救援服用于低温、寒冷条件下救援人员身体防护46干式水域救援服用于救援人员低温环境下穿着,具有防水保暖功能47水域救援头盔(冰域救援型)用于寒冷环境人员头部保暖,减少头部热量散失48水域救援手套(冰域救援型)用于手部防护和保暖,具有耐磨性,增加抓握摩擦力49水域救援靴(冰域救援型)用于小腿部和足部的防护和保暖,具有防滑、防穿刺功能50保温衣裤作为冰面救援服或干式水域救援服的保温内胆,提高御寒能力,延长水中作业时间51冰锥用于增加冰面行进过程中摩擦力,提高人员行动力52冰爪用于救援靴防滑辅助冰面行走,增加作业稳定性53冰镐用于帮助救援人员建立固定支点54搜救类冰面探杆用于行进时探测冰面厚度55冰面救援滑板用于冰面救援人员进行拖带滑行装备类型装备名称主要用途56冰面救援类搜救类充气式冰面救援筏用于冰面救援,人员无需脱离船体,直接进行拖拽施救57充气浮桥用于冰面救援,人员无需脱离船体,直接进行拖拽施救58 冰域救援绳索套装(包括水面漂浮绳、消防安全绳、辅绳、滑轮、安全钩、扁带)用于绳索系统救援,其技术性能应符合XF 494的要求59破拆类机动链锯用于救援人员快速切割扩大冰面作业面积60综合保障类水域救援车(1)运送救援装备;(2)在野外为气瓶充气,为潜水员提供气体支持61应急帐篷用于现场应急指挥与人员休息62集群对讲设备用于现场应急通信63 医疗急救箱(包括心脏外部除颤器、应急药品等)用于抢救心脏骤停人员。
声呐探测作业指南
声呐探测作业指南下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help yousolve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts,other materials and so on, want to know different data formats and writing methods, please pay attention!声呐探测作业指南声呐技术是一种通过发射声波并利用回波来探测目标的技术。
危险水域语音指令及语法说明中文版

Sonalysts Combat Simulations危险水域语音识别口令及语法kilorocky 译内部发行中国虚拟舰队说明[ ] = 方括号以内的内容为可选项(即无论是否说出来都不影响识别)n = 任意一位阿拉伯数字nn = 任意两位阿拉伯数字(请注意在某些指令中数字是有范围的)1.0 潜艇 (688(I), Seawolf, Akula, Kilo)All ahead flank指令潜艇主机极速前进All ahead full指令潜艇主机全速前进All ahead standard指令潜艇主机标准速度前进All ahead two thirds指令潜艇主机2/3速前进All ahead one third指令潜艇主机1/3速前进All stop指令潜艇主机停车All back one third指令潜艇主机1/3速倒车All back two thirds指令潜艇主机2/3速倒车All back full指令潜艇主机全速倒车All back emergency指令潜艇主机紧急倒车Right full rudder潜艇右满舵Right standard rudder潜艇右舵Left full rudder潜艇左满舵Left standard rudder潜艇左舵Rudder amid ships潜艇舵归零Go deep指令潜艇进入深潜(进入约85%最大潜深)Go shallow指令潜艇进入浅水(进入约10%最大潜深)Go to periscope depth指令潜艇进入潜望镜深度Go to snorkel depth指令潜艇进入通气管深度Surface [the ship]指令潜艇上浮Raise the radar mast升起雷达桅杆(无论潜艇是否处于恰当深度)Raise the E S M mastRaise the E S M antenna升起ESM桅杆(无论潜艇是否处于恰当深度)Raise the radio mastRaise the radio antenna升起无线电桅杆(无论潜艇是否处于恰当深度)Raise the periscope升起潜望镜(无论潜艇是否处于恰当深度)Raise the snorkel mast升起通气管/开始通气(无论潜艇是否处于恰当深度)Lower the radar mast降下雷达桅杆Lower the E S M mastLower the E S M antenna降下ESM桅杆Lower the radio mastLower the radio antenna降下无线电桅杆Lower the periscope降下潜望镜Lower the snorkel mast降下通气管/停止通气Lower all masts [and antennas]降下所有桅杆Make turns for n [n] [knots]Make your speed n [n] [knots]指令潜艇进入特定航速Make your depth n [n] [n] [n] [feet] Make your depth n [n] [n] [n] [meters] 指令潜艇进入特定深度Make your course n [n] [n] [degrees] 指令潜艇进入特定航向Designate type as surface指定选中目标类别为水面舰船Designate type as sub surface指定选中目标类别为水下物体Designate type as air指定选中目标类别为空中物体Designate type as helo指定选中目标类别为直升机Designate type as missile指定选中目标类别为导弹Designate type as statDesignate type as stationary指定选中目标为固定物体Designate type as mine指定选中目标为水雷Designate type as weaponDesignate type as torpedo指定选中目标为武器/鱼雷Designate type as unknown指定选中目标为未知Designate alliance as threatDesignate alliance as hostile指定选中目标身份为敌对Designate alliance as assumed threat Designate alliance as assumed hostile Designate alliance as assumed enemy 指定选中目标身份为假定敌对Designate alliance as alliedDesignate alliance as friendly指定选中目标身份为己方Designate alliance as assumed allied Designate alliance as assumed friendly 指定选中目标身份为假定己方Designate alliance as neutral指定选中目标身份为假定中立Designate alliance as unknown指定选中目标身份为未知指令Classify [as]Classify [contact]Classify [platform]打开选中目标的身份识别对话框Set confidence to low设定选中目标识别把握为低Set confidence to medium设定选中目标识别把握为中Set confidence to high设定选中目标识别把握为高Launch active decoy deep发射深水主动水声对抗器材Launch active decoy shallow发射潜水主动水声对抗器材Launch passive decoy deep发射深水被动水声对抗器材Launch passive decoy shallow发射潜水被动水声对抗器材Launch [internal] tube n发射内部n号管中武器Launch external tube nLaunch external tube nn发射外部n号管中武器Go to [the] ship control [screen] 切换到潜艇控制界面Go to [the] sonar [screen]切换到声呐控制界面Go to [the] radar [screen]切换到雷达控制界面Go to [the] radio [screen]切换到无线电控制界面Go to [the] T M A [screen]切换到TMA控制界面Go to [the] fire control [screen] 切换到火力控制界面Go to [the] navigation [screen] 切换到航海控制界面Go to [the] sail bridge [screen] 切换到指挥塔Go to [the] periscope [screen] 切换到潜望镜Go to [the] options [screen]切换到选项控制界面Go to [the] reference [screen]切换到USNI(海军学会资料库)界面Go to [the] mission status [screen]切换到任务状态对话框Stream the port towed array释放左舷拖曳声呐(适用于Seawolf和688(I))Retrieve the port towed array收回左舷拖曳声呐(适用于Seawolf和688(I))Stop the port towed array停止释放/收回左舷拖曳声呐(适用于Seawolf和688(I))Stream the starboard towed array释放右舷拖曳声呐(适用于Seawolf和688(I))Retrieve the starboard towed array收回右舷拖曳声呐(适用于Seawolf和688(I))Stop the starboard towed array停止释放/收回右舷拖曳声呐(适用于Seawolf和688(I))Stream the towed array释放拖曳声呐(适用于Akula)Retrieve the towed array收回释放拖曳声呐(适用于Akula)Stop the towed array停止释放/收回拖曳声呐(适用于Akula)Stream the floating wire释放浮标天线Retrieve the floating wire收回浮标天线Stop the floating wire停止释放/收回浮标天线Start the port [diesel] engine启动左舷柴油发动机(适用于Kilo级)Stop the port [diesel] engine停止左舷柴油发动机(适用于Kilo级)Start the starboard [diesel] engine 启动右舷柴油发动机(适用于Kilo级)Stop the starboard [diesel] engine 停止右舷柴油发动机(适用于Kilo级)2.0 护卫舰(FFG-7 Perry)Engine ahead flank指令主机极速前进Engine ahead full指令主机全速前进Engine ahead standard指令主机标准速度前进Engine ahead two thirds指令主机2/3速前进Engine ahead one third指令主机1/3速前进Engine stop指令主机停车Engine back one third指令主机1/3速倒车Engine back two thirds指令主机2/3速倒车Engine back full指令主机全速倒车Right 5 degrees rudder指令右舵5度Right 10 degrees rudder指令右舵10度Right standard rudder指令右舵15度Right full rudder指令右满舵Right hard rudder指令右舵25度Left 5 degrees rudder指令左舵5度Left 10 degrees rudder指令左舵10度Left standard rudder指令左舵15度Left full rudder指令左舵20度Left hard rudder指令左舵25度Rudder amid ships指令舵归零Make turns for n [n] [knots]Make your speed n [n] [knots]Indicate turns for n [n] [knots] 指令进入特定航速Steady on course n [n] [n] [degrees] Come left to course n [n] [n]Come right to course n [n] [n]指令进入特定航向Designate type as surface指定选中目标类别为水面舰船Designate type as sub surface指定选中目标类别为水下物体Designate type as air指定选中目标类别为空中物体Designate type as helo指定选中目标类别为直升机Designate type as missile指定选中目标类别为导弹Designate type as statDesignate type as stationary指定选中目标为固定物体Designate type as mine指定选中目标为水雷Designate type as weaponDesignate type as torpedo指定选中目标为武器/鱼雷Designate type as unknown指定选中目标为未知Designate alliance as threatDesignate alliance as hostile指定选中目标身份为敌对Designate alliance as assumed threat Designate alliance as assumed hostile Designate alliance as assumed enemy 指定选中目标身份为假定敌对Designate alliance as alliedDesignate alliance as friendly指定选中目标身份为己方Designate alliance as assumed allied Designate alliance as assumed friendly 指定选中目标身份为假定己方Designate alliance as neutral指定选中目标身份为假定中立Designate alliance as unknown指定选中目标身份为未知指令Classify [as]Classify [contact]Classify [platform]打开选中目标的身份识别对话框Set confidence to low设定选中目标识别把握为低Set confidence to medium设定选中目标识别把握为中Set confidence to high设定选中目标识别把握为高Go to [the] bridge [screen]切换至舰桥Go to [the] acoustic [screen]切换至水声工作站Go to [the] ASTAC [screen]切换至ASTACGo to [the] active [screen]切换至主动声呐Go to [the] E W [screen]切换至 EWGo to [the] towed array [screen]切换至拖曳声呐Go to [the] T M A [screen]切换至TMAGo to [the] weapons coordinator [screen] 切换至武器协调员Go to [the] torpedo control [screen] 切换至鱼雷控制Go to [the] weapons control [screen] 切换至武器控制Go to [the] navigation [screen]切换至航海Go to [the] machine gun [screen]切换至机枪Go to [the] options [screen]切换至选项Go to [the] reference [screen]切换至美国海军学会USNI资料库Go to [the] mission status [screen]切换至任务状态对话框Launch port flare左舷发射红外诱饵Launch port chaff左舷发射金属箔条Launch starboard flare右舷发射红外诱饵Launch starboard chaff右舷发射金属箔条Drop DICASS buoy deep投放一个深水DICASS浮标(必须符合当前装填情况)Drop DICASS buoy shallow投放一个浅水DICASS浮标(必须符合当前装填情况)Drop DIFAR buoy deep投放一个深水DIFAR浮标(必须符合当前装填情况)Drop DIFAR buoy shallow投放一个浅水DIFAR浮标(必须符合当前装填情况)Drop VLAD buoy deep投放一个深水VLAD(读作Vee-lad)浮标(必须符合当前装填情况)Drop VLAD buoy shallow投放一个浅水VLAD(读作Vee-lad)浮标(必须符合当前装填情况)Drop BT probe投放BT 探测器(必须符合当前装填情况)Launch tube n发射n号发射管中鱼雷Turn [the] surface radar on开启对海雷达Turn [the] surface radar off 关闭对海雷达Turn [the] air radar on开启对空雷达Turn [the] air radar off关闭对空雷达Stream the towed array释放拖曳声呐Retrieve the towed array回收拖曳声呐Stop the towed array停止释放/回收拖曳声呐Stream the NIXIE释放NIXIE阵列Retrieve the NIXIE回收NIXIE阵列Stop the NIXIE停止释放/回收拖曳声呐Secure all关闭所有桅杆和阵列Set green deck指令飞行平台开放Set red deck指令飞行平台关闭Hold fire指令CIWS进入禁止射击模式Auto fire指令CIWS进入自动射击模式Full auto fire指令CIWS进入全自动射击模式3.0 直升机(MH-60R)Set your altitude [to] high指令直升机进入高高度(约最大飞行高度的85%)Set your altitude [to] medium指令直升机进入中高度(约最大飞行高度的40%)Set your altitude [to] low指令直升机进入低高度(约最大飞行高度的5%)Set your altitude [to] dip指令直升机进入最适于使用沉浸声呐的高度(约50英尺)Make your altitude n [n] [n] [n] [n] [feet] 指令直升机进入特定高度Set your speed [to] high指令直升机高速飞行(约最大航速的85%)Set your speed [to] medium指令直升机中速飞行(约最大航速的45%)Set your speed [to] low指令直升机低速飞行(约最大航速的25%)Set your speed [to] hover指令直升机悬停(约0节)Make your speed n [n] [n] [knots]指令直升机以特定航速飞行Make your course n [n] [n] [degrees]指令直升机进入特定航向Designate type as surface指定选中目标类别为水面舰船Designate type as sub surface指定选中目标类别为水下物体Designate type as air指定选中目标类别为空中物体Designate type as helo指定选中目标类别为直升机Designate type as missile指定选中目标类别为导弹Designate type as statDesignate type as stationary指定选中目标为固定物体Designate type as mine指定选中目标为水雷Designate type as weaponDesignate type as torpedo指定选中目标为武器/鱼雷Designate type as unknown指定选中目标为未知Designate alliance as threatDesignate alliance as hostile指定选中目标身份为敌对Designate alliance as assumed threat Designate alliance as assumed hostile Designate alliance as assumed enemy 指定选中目标身份为假定敌对Designate alliance as alliedDesignate alliance as friendly指定选中目标身份为己方Designate alliance as assumed allied Designate alliance as assumed friendly 指定选中目标身份为假定己方Designate alliance as neutral指定选中目标身份为假定中立Designate alliance as unknown指定选中目标身份为未知指令Classify [as]Classify [contact]Classify [platform]打开选中目标的身份识别对话框Set confidence to low设定选中目标识别把握为低Set confidence to medium设定选中目标识别把握为中Set confidence to high设定选中目标识别把握为高Go to [the] pilot [screen]切换至飞行员界面Go to [the] A T O [screen]切换至ATOGo to [the] acoustics [screen]切换至水声工作站Go to [the] radar [screen]切换至雷达Go to [the] sonar [screen]切换至声呐Go to [the] MAD [screen]切换至MADGo to [the] E S M [screen]切换至ESMGo to [the] navigation [screen] 切换至导航Go to [the] options [screen]切换至选项Go to [the] reference [screen]切换至美国海军学会USNI资料库Go to [the] mission status [screen] 切换至任务状态对话框Launch flare发射红外诱饵Launch chaff发射金属箔条Drop DICASS buoy deep投放一个深水DICASS浮标Drop DICASS buoy shallow投放一个浅水DICASS浮标Drop DIFAR buoy deep投放一个深水DIFAR浮标Drop DIFAR buoy shallow投放一个浅水DIFAR浮标Drop VLAD buoy deep投放一个深水VLAD(读作Vee-lad)浮标Drop VLAD buoy shallow投放一个浅水VLAD(读作Vee-lad)浮标Drop BT probe投放BT 探测器(必须符合当前装填情况)Launch pylon n发射n号挂架上的武器Return to base命令飞机返回母舰并降落Turn [the] radar on开启雷达Turn [the] radar off关闭雷达Turn [the] ESM on开启ESM天线Turn [the] ESM off关闭ESM天线Turn [the] MAD on开启MAD天线Turn [the] MAD off关闭MAD天线Stream the hydrophone释放沉浸声呐Retrieve the hydrophone 收回沉浸声呐Stop the hydrophone停止释放/收回沉浸声呐Stream the MAD sensor释放MAD天线Retrieve the MAD sensor 收回MAD天线Stop the MAD sensor停止释放/收回MAD天线Secure all收回所有线缆4.0 飞机 (P-3C猎户座)Set your altitude [to] high指令飞机进入高高度(约最大飞行高度的85%)Set your altitude [to] medium指令飞机进入中高度(约最大飞行高度的40%)Set your altitude [to] low指令飞机进入低高度(约最大飞行高度的5%)Set your altitude [to] MAD search指令飞机进入最适于MAD搜索的高度(约300英尺)Make your altitude n [n] [n] [n] [n] [feet] 指令飞机进入特定高度Set your speed [to] high指令飞机高速飞行(约最大航速的90%)Set your speed [to] medium指令飞机中速飞行(约最大航速的65%)Set your speed [to] low指令飞机低速飞行(最低飞行速度)Make your speed n [n] [n] [knots]指令飞机以特定航速飞行Make your course n [n] [n] [degrees]指令飞机进入特定航向Designate type as surface指定选中目标类别为水面舰船Designate type as sub surface指定选中目标类别为水下物体Designate type as air指定选中目标类别为空中物体Designate type as helo指定选中目标类别为直升机Designate type as missile指定选中目标类别为导弹Designate type as statDesignate type as stationary指定选中目标为固定物体Designate type as mine指定选中目标为水雷Designate type as weaponDesignate type as torpedo指定选中目标为武器/鱼雷Designate type as unknown指定选中目标为未知Designate alliance as threatDesignate alliance as hostile指定选中目标身份为敌对Designate alliance as assumed threat Designate alliance as assumed hostile Designate alliance as assumed enemy 指定选中目标身份为假定敌对Designate alliance as alliedDesignate alliance as friendly指定选中目标身份为己方Designate alliance as assumed allied Designate alliance as assumed friendly 指定选中目标身份为假定己方Designate alliance as neutral指定选中目标身份为假定中立Designate alliance as unknown指定选中目标身份为未知指令Classify [as]Classify [contact]Classify [platform]打开选中目标的身份识别对话框Set confidence to low设定选中目标识别把握为低Set confidence to medium设定选中目标识别把握为中Set confidence to high设定选中目标识别把握为高Go to [the] pilot [screen]切换至飞行员界面Go to [the] acoustics [screen]切换至水声工作站Go to [the] radar [screen]切换至雷达Go to [the] MAD [screen]切换至MADGo to [the] E S M [screen]切换至ESMGo to [the] infrared [screen]切换至红外侦察Go to [the] TACCO [screen]切换至TACCOGo to [the] navigation [screen] 切换至导航Go to [the] options [screen]切换至选项Go to [the] reference [screen]切换至美国海军学会USNI资料库Go to [the] mission status [screen] 切换至任务状态对话框Launch flare发射红外诱饵Launch chaff发射金属箔条Drop DICASS buoy deep投放一个深水DICASS浮标Drop DICASS buoy shallow投放一个浅水DICASS浮标Drop DIFAR buoy deep投放一个深水DIFAR浮标Drop DIFAR buoy shallow投放一个浅水DIFAR浮标Drop VLAD buoy deep投放一个深水VLAD(读作Vee-lad)浮标Drop VLAD buoy shallow投放一个浅水VLAD(读作Vee-lad)浮标Drop BT probe投放BT 探测器(必须符合当前装填情况)Launch pylon nLaunch pylon nn发射n号挂架上的武器Return to base命令飞机返回基地并降落Secure all收回所有线缆Open bomb bay [doors]开启炸弹舱门Close bomb bay [doors]关闭炸弹舱门Turn [the] radar on开启雷达Turn [the] radar off 关闭雷达Turn [the] ESM on开启ESM天线Turn [the] ESM off关闭ESM天线Turn [the] MAD on开启MAD天线Turn [the] MAD off关闭MAD天线。
浅析侧扫声纳在水下搜寻救助作业中的应用

浅析侧扫声纳在水下搜寻救助作业中的应用◎杨伟光交通运输部南海救助局►摘要:本文通过对南海救助局广州救助基地装备的Kle1n5000v2进行的两例救助案例进行分析,结合案例讨论侧扫声纳与潜水员协同完成落水目标搜寻的方法。
可以为今后水下搜寻救助作业提供参考。
►关键词:侧扫声纳救助打捞侧扫声纳广泛应用于地质调査、矿物勘探、海洋工程勘探、探测水雷、等领域。
作为一种新型的搜寻救助手段,能够有效弥补传统潜水救助中对于水下目标搜索和定位手段的不足,提高了水下应急处置和救助能力。
1•设备介绍侧扫声纳侧扫声呐是一种主动声呐系统,侧扫声呐原理是向测量船航向的垂直方向一侧或两侧发射一个水平开角很小(约1度左右),垂直开角很大的短声波脉冲,脉冲到达海底后,根据海底距换能器的远近,被不断反射,并按反射信号的强弱程度画出灰度变化不均的声呐图像,从声吶图像中可以观察出海底地貌变化,是否有地形突起和海底目标。
南海救助局广州救助基地装备的侧扫声纳为Klein5000V2侧扫声纳,该声纳是多个波束动态聚焦的侧扫声纳系统,单侧有5个波束,单侧最大量程150m,最大工作水深500m,拖鱼直径15.2cm,长194cm,重70kg;作业航速2-10kno脉冲类型(CW/FM),频率455Khz o1.2侧扫声纳发现物体的能力一般认为,有2个以上的波束打到物体上,才能够在声纳图像上形成明显的成像。
根据侧扫声纳的工作原理,一个声波脉冲的时间为:T_2R4=W(1)其中:R为声纳系统釆集的距离最远的声波反射距离,即声纳系统选择的量程。
C为水中声速,一般取1500m/s作为近似值。
Tp为一个声波脉冲往返所需要的时间。
在一个声波脉冲时间中,拖鱼走过的距离即为两个声波脉冲之间的距离,此距离为:D=场X%(2)其中:D为两个声波脉冲之间的距离。
Vs为拖曳速度,近似为拖曳母船速度。
V打到目标物上的声波数量为:N=D⑶图1侧扫声纳作业原理图图2Trimble SPS351差分GPS接收机/89学术C~A CADEMIC图6声纳扫测区域示意图其中,L为搜寻的目标沿拖鱼前进方向的长度,N为打到目标物上的声波数量。
用声呐搜救落水人原理
用声呐搜救落水人原理你知道吗?当有人落水了,那些超级厉害的救援人员就会拿出一个超酷的“神器”——声呐,来寻找落水的人呢。
这声呐啊,就像是一个有着超级感知能力的小侦探。
声呐呢,它主要是靠声音来工作的。
你想啊,在水里,咱们的眼睛可就不那么灵光了,黑乎乎的啥也看不太清。
但是声音就不一样啦。
声呐会发出一种声音信号,就像你在山谷里大喊一声,声音会传出去然后再反射回来一样。
声呐发出的声音信号就会在水里传播开来。
这声音就像一个个小小的信使,欢快地在水里游啊游。
当这个声音信号碰到水里的东西的时候,比如说碰到了落水的人,就会反射回来。
这就像是你扔出去一个小皮球,皮球碰到墙就会弹回来一样。
那声呐的设备就特别聪明啦,它能接收到这个反射回来的声音信号。
而且啊,它还能根据声音信号回来的时间,算出这个东西离自己有多远呢。
就好像你知道小皮球飞出去再回来用了多长时间,就能大概算出墙离你有多远一样。
你可别小看这个原理哦。
这声呐的声音信号可是很有讲究的。
它发出的声音频率啊,就像是一首歌的调调一样。
不同的频率在水里传播的效果还不太一样呢。
有的频率适合在比较清澈的水里传播,就像轻快的小夜曲在安静的房间里传播得很好一样;有的频率呢,就算水有点浑浊也能传播得不错,就像那种节奏感很强的摇滚乐,不管环境多嘈杂也能被人听到。
对于落水的人来说,声呐就像是他们在黑暗的水世界里的希望之光。
救援人员通过声呐的这个原理,就能在茫茫的水域里准确地定位到落水者的位置。
这就像是在一个巨大的迷宫里,有了一个指南针一样。
想象一下,落水的人在水里可能又害怕又无助,就盼着有人来救自己呢。
而声呐就像是救援人员的秘密武器,在悄悄地寻找着他们。
声呐发出的声音信号就像是在对落水者说:“小宝贝,我们来找你啦,别害怕哦。
”当声呐接收到反射回来的信号,确定了落水者的位置,救援人员就可以像超级英雄一样迅速地赶过去,把落水者从危险的水里拉到安全的地方。
这声呐的原理虽然听起来有点复杂,但是它做的事情可真是充满了爱和温暖呢。
水域救援-精品文档

水域救援汇报人:日期:•水域救援概述•水域救援技术与方法•水域救援装备与器材目录•水域救援训练与演练•水域救援案例分析与实践经验分享•水域救援未来发展趋势与挑战01水域救援概述水域救援是指在水域环境中,对遇险人员、船只、车辆等进行救助和救援的行为。
定义水域救援对于保障人民生命财产安全、维护社会稳定具有重要意义,同时也是衡量一个国家或地区应急救援能力的重要指标。
重要性水域救援的定义与重要性水域救援起源于古代,当时主要是依靠船只、木筏等简单工具进行救助。
随着科技的发展,现代水域救援逐渐形成了专业化的体系和队伍。
现代水域救援在技术、装备、人员素质等方面都得到了极大的提升,形成了以消防、公安、交通、海事等部门为主体的多元化救援体系。
发展历史水域救援可以根据不同的标准进行分类,如按照救援对象可分为人员救助、船只救助等;按照救援方式可分为水面救助、潜水救助等。
分类水域救援具有环境复杂、技术要求高、危险性大等特点,需要专业的技术和装备,以及训练有素的救援人员。
同时,水域救援还需要根据实际情况灵活应对,确保救援行动的安全和有效。
特点02水域救援技术与方法使用潜水设备,如潜水服、呼吸器等,进行水下救援。
潜水设备潜水技能救援策略掌握潜水技能,如水下导航、水下通讯等,以应对复杂的水下环境。
根据救援现场情况,制定合适的潜水救援策略,确保救援行动的安全和有效。
030201选择适合救援任务的船只,如冲锋舟、橡皮艇等。
船只选择熟练掌握船只操作技能,如划桨、舵操作等,以应对不同的水域环境。
船只操作根据救援现场情况,选择合适的船只救援方法,如抛绳救援、船只拖拽等。
救援方法选择适合救援任务的无人机类型,如多旋翼无人机、固定翼无人机等。
无人机类型熟练掌握无人机的操作技能,如起飞、降落、飞行控制等。
无人机操作利用无人机进行空中搜索、定位、监控等任务,提高救援效率。
救援应用无人机救援技术利用绳索进行救援,如抛绳救援、绳索拖拽等。
绳索救援技术利用声呐设备进行水下探测,寻找失踪人员或确定救援目标位置。
水域救援培训教材2

初级培训教材公开水域救援和消防舟艇操作(试行)湖南省消防救援总队2019年9月目录第一部分基础理论第一节水域基本知识第二节水域救援基本常识第三节消防舟艇基本常识第四节舟艇驾驶基本知识(联络手语、信号)第二部分装备简介第一节消防舟艇的基本结构(图)第二节消防舟艇的组装(图)第三节消防舟艇随舟配备器材标准(图)第四节各类水域救援装备简介(图)第五节个人水域救援专业装备简介及穿戴注意事项(图)第六节船外机基本结构(图)第七节船外机基本故障排除方法第三部分实操训练(一)基础训练第一节个人水域救援装备穿戴实操第二节入水法实操第三节舟艇组装实操第四节舟艇的搬运操第五节舟艇的无动力划桨操第六节舟艇的无动力翻舟自救第七节舟艇启动与熄火实操第八节舟艇挂机拆卸实操第九节舟艇保养(二)实操科目第一节舟艇外机原地操作1.操控舟艇外机的三个姿势2.叼机的三种状态第二节舟艇的离靠岸实操1.离岸2.靠岸第三节舟艇入门驾驶实操1.前进2.倒退3.转弯4.掉头第四节舟艇受限区域实操1.受限区域掉头2.受限区域倒库3.受限区域移库4.受限区域靠岸第五节舟艇基本驾驶实操1.o型驾驶2.s型驾驶3.z型驾驶4.驾驶通过障碍物5.驾驶动态并交换船只6.驾驶拖船实操7.编队长途航行(三)舟艇救援第一节岸上抛绳救援实操第二节舟艇抛绳救援实操第三节舟艇带动力翻舟自救和故障排除第四节舟艇活饵救援操第五节舟艇快速救人操第四部分考核认证第一节体能考核第二节理论考核(理论考核建议统一出题,同时考试)总队可以根据培训要求统一出题,难度系数可以适当降低,主要体现救援安全和舟艇基本知识。
防止各个培训点为完成指标任务而忽视理论知识学习,同时促进学员学习主动性,保证每名学员有最基本的水域救援知识。
同时避免总队统一发证的学员,学习和考试内容不相同。
第三节实操考核一、救援技术(救援技术去年只做了训练,未进行考核,建议救援技术不以时间快慢做考核标准,以技术动作是否规范、处置是否符合救援安全规定评定)二、舟艇操作1.受限区域驾驶舟艇考核2.非受限区域驾驶舟艇考核3.团队操作考核1第一部分基础理论水域事故具有突发性强、时间紧迫、技术要求高、救援难度大、危险性高的特定性,近年来全省各地水域救援行动显著增多,要顺利完成各类水域救援任务,消防救援队伍就必须适应全方位打恶仗的需要,实事求是地研究和探索当前各类水域情况和水域救援技术,有针对性地开展训练,不断提升水域救援专业能力。
水域救援声呐作业指南电子版

水域救援声呐作业指南电子版英文回答:Water Rescue Sonar Operation Guide.Introduction:Water rescue sonar is an essential tool used in search and rescue operations in water bodies. This guide provides detailed instructions on how to effectively operate a water rescue sonar device.1. Equipment Preparation:Before using the water rescue sonar, ensure that all equipment is in good working condition. Check the sonar device, cables, and power supply for any damages or faults. Make sure the batteries are fully charged or havesufficient power.准备工作:在使用水域救援声呐之前,确保所有设备都处于良好的工作状态。
检查声呐设备、电缆和电源是否有任何损坏或故障。
确保电池充满电或有足够的电量。
2. Sonar Deployment:Choose an appropriate location to deploy the sonar device. Ideally, it should be near the area where the rescue operation will take place. Attach the sonar device to a sturdy pole or mount it on a boat. Ensure that the sonar transducer is fully submerged in the water.声呐部署:选择一个合适的位置部署声呐设备。
DNV-OS-D101(2013-10)-中文版
水域救援作业指南
水域救援作业指南
《水域救援作业指南》
嘿呀,咱今天就来说说这水域救援的事儿哈。
你知道吗,有一次我去海边玩,就亲眼看到了一场小小的“救援行动”。
那时候阳光特别好,好多人都在海里嬉戏呢。
我正悠闲地在沙滩上走着,突然就听到有人喊:“救命啊!”我顺着声音看过去,哎呀,一个小伙子好像被海浪给卷得有点远了。
这时候,就看到几个救生员立马行动起来啦。
他们可专业了,就像一阵风似的冲向海边,其中一个救生员拿起一个大大的救生圈,那救生圈红彤彤的,特别显眼。
他快速地跳进海里,朝着那个小伙子游过去。
那游泳的速度,简直比鱼都快呢!另一个救生员呢,则在岸边拿着对讲机,不停地说着什么,应该是在和其他人联系、协调吧。
那个跳进海里的救生员游到小伙子身边后,一把就把救生圈套在了他身上,然后就带着他往回游。
这时候海浪还在不停地拍打着他们,但救生员一点都不害怕,紧紧地拉着小伙子。
等游回岸边后,小伙子都有点懵了,估计是被吓到了,救生员还安慰他呢,说:“别怕别怕,这不是没事啦!”周围的人都松了一口气,纷纷给救生员鼓掌。
哎呀呀,从这件事我就明白啦,水域救援真的很重要啊!救生员们得时刻准备着,动作要快,还要有勇气和智慧。
而且啊,咱们去水边玩的时候,也得注意安全,别瞎闹腾,不然可就麻烦啦。
总之呢,水域救援这事儿可不能马虎,大家都得重视起来,这样才能让我们在享受水域带来快乐的同时,也能保证安全呀!嘿嘿,这就是我对水域救援作业的一点小感受啦!。
水中救援应急预案方案
一、背景随着我国经济的快速发展,水上活动日益增多,溺水事故也时有发生。
为了提高水上救援能力,保障人民群众的生命安全,特制定本预案。
二、预案目标1. 建立健全水上救援应急体系,提高水上救援能力。
2. 及时、有效地组织水上救援行动,减少人员伤亡和财产损失。
3. 加强水上救援队伍建设,提高救援人员素质。
三、预案范围本预案适用于我国境内所有水域的救援行动,包括江河、湖泊、水库、海洋等。
四、组织机构及职责1. 指挥部成立水上救援指挥部,负责统一指挥、协调和调度水上救援行动。
2. 救援小组成立水上救援小组,负责具体实施救援行动。
3. 医疗救护组负责伤员的救治和转运。
4. 通讯保障组负责救援行动的通讯联络和信息收集。
5. 交通保障组负责救援行动的交通保障。
五、救援流程1. 报警:发现溺水事故后,立即报警。
2. 接警:接到报警后,立即启动应急预案,成立救援小组。
3. 出动:救援小组迅速赶赴现场,展开救援行动。
4. 救援:根据现场情况,采取相应救援措施,如救助、救援、搜救等。
5. 救治:将伤员迅速送往医院进行救治。
6. 后期处理:对事故原因进行调查,总结经验教训。
六、救援措施1. 救助:采用救生圈、救生衣、绳索等救生器材进行救助。
2. 救援:利用救援船只、潜水员等实施救援。
3. 搜救:利用无人机、声呐等设备进行搜救。
4. 医疗救护:对伤员进行现场急救,并迅速送往医院。
七、应急物资储备1. 救生器材:救生圈、救生衣、绳索等。
2. 救援设备:救援船只、潜水设备、无人机等。
3. 医疗救护设备:急救药品、医疗器械等。
八、培训和演练1. 定期组织救援人员培训,提高救援技能。
2. 定期开展水上救援演练,检验预案的可行性和救援队伍的实战能力。
九、预案修订本预案根据实际情况和救援需求进行修订,有效期自发布之日起至下一版发布之日止。
十、附则1. 本预案由水上救援指挥部负责解释。
2. 本预案自发布之日起实施。
西姆拉德SU90鱼群探测声纳说明书
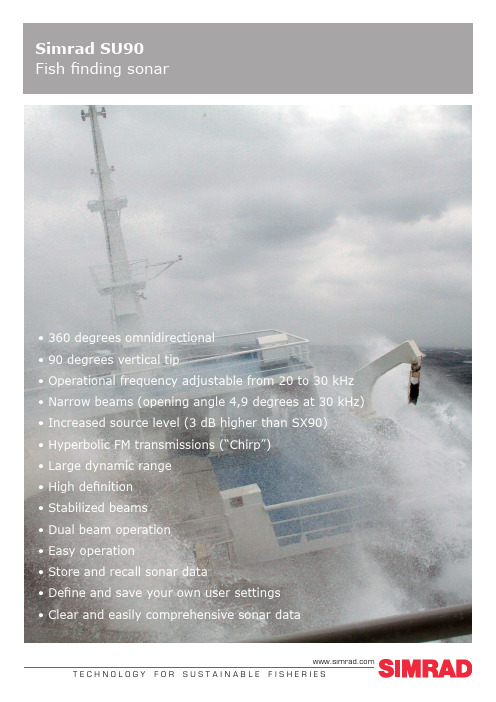
T E C H N O L O G Y F O R S U S T A I N A B L E F I S H E R I E SThe Simrad SU90 is a long range omnidirectional low frequency sonar. It is designed formedium and large sized fishing vessels, preferably for purse seiners, but it is also well suitable for trawlers.If high performance is your only criteria when choosing a sonar; such as long range, high resolution, narrow beams and high source levels - the Simrad SU90 is the sonar for you. We made no compromises during the design of this sonar, or goal was to make the ultimate performance sonar.The SU90 allows you to choose an operational frequency between 20 to 30 kHz (in 1 kHz steps). The cylindrical multi-element transducer allows the omnidirectional sonar beams to be tilted electronically from +10 to –60 degrees. This allows you to automatically track schools of fish, and to observe the whole water volume around the vessel. A stabilizing system is included for electronic pitch and roll compensation.Compared to the Simrad SX90, the number of channels is increased by 50% giving the sonar an even better performance in selectivity and range.The narrow opening angle (4,9 degrees at 30 kHz) and the increased source level (3 dB) makes the SU90 a very powerful and high resolution low frequency sonar. The narrow beam makes the SU90 even more ideal for searching fish close to the bottom or close to the surface at long ranges. It also provides a far better vertical view with less “bottom climbing” that is seen on sonars with a wider beam.Great emphasis has been placed on giving the best possible sonar presentations on a high resolution colour display.The SU90 is equipped withSimrad’s celebrated signal processing software. It includes Hyperbolic FM transmissions (also know as “Chirp”) to ensure a clutter free picture with very high resolution in range.The signal processing andbeamforming is performed in a fastThis SU90 screen capture shows you a typical catch situation. The presentation provides you with a lot of information.A Current range, transducer tilt and gain B Sonar presentationC Cursor’s position, bearing (relative to the vessel), range and depthD Purse seine and target information (depth and estimated school size), including information from catch monitoring depth sensorsE Menu systemF Vertical viewG Navigation information and hull unit positiondigital signal processing system using the full dynamic range of the signals. In addition to the traditional single frequency transceiver system, the SU90 contains an advanced frequency modulated filter system (FM).The SU90 Processor Unit is controlled by the Microsoft® Windows® operating system, which result in a flexible choice of presentation modes for a large range of user applications.AGC (Automatic Gain Control) RCG (Receiver Controlled Gain)• Digital filters:Ping-to-Ping FilterNoise filterFM Correlation filterBottom filterEcho presentations• Number of colours: 16 or 64• Display resolution: Minimum 1280 x 1024 pixels• Colours: Weak, Normal or Strong • Palettes: Choice of colour palettes to fit ambient light conditions Beams• Horizontal transmission: 360 degrees• Horizontal reception: 8,5 to 13 degrees • Vertical transmission: 4.9 to 7.0degrees• Vertical reception: 5.3 to 7.4degreesBeam widths• User selected: Narrow, Normal orWideStabilisation• Roll stabilisation: Automatic, ±20degrees• Pitch stabilisation: Automatic, ±20degrees• Interface to optional peripheralmotion reference unit supportedInterfaces• Serial lines: Five serial lines (RS-232/RS-422/RS-485)• Transceiver Unit: Ethernet• Optional interfaces:Scientific output (Ethernet)RAW data output for scientificresearch (Ethernet)Hull Unit and transducer• Stroke length:With SU92 hull unit: 1.2 metersWith SU93 hull unit: 1.6 meters• Maximum vessel speed:With SU92 hull unit: 21 knotsWith SU93 hull unit: 18 knots• Maximum lowering and retrievalspeed: Same as maximum vesselspeed• Transducer:Shape: CylindricalNumber of individual elements:384396081-EN / Rev.A / August 2014(CD010204_201_001)Weights and outline dimensionsThe weights and outline dimension characteristics summarize the physical properties of the Simrad SU90 system.Relevant drawings can be found in the SU90 Installation manual, or downloaded from our website. See:• /su90Transceiver Unit• Depth: 665 mm (with shock absorbers)• Width: 563 mm (without transducer plug)• Height: 750 mm (with shock absorbers)• Weight: 75 kgHull Unit• Flange diameter: 760 mm • Trunk diameter: 610 mm • Height:SU92 total: 3228 mmSU92 above trunk: 2118 mm SU93 total: 3628 mmSU93 above trunk: 2518 mm Trunk: 1110 mm • Weight:SU92: approximately 850 kg SU93: approximately 900 kgKongsberg Maritime AS Strandpromenaden 50P.O.Box 111N-3191Horten,NorwaySimradTelephone:+4733034000Telefax:+4733042987***********************。
水域救援技术和组织概论电子版
水域救援技术和组织概论电子版1、前期救援准备至关重要:一是组建合理救援队伍。
人是主体,要选定指挥、舟艇操作、观察、救生、通信、宣传、政工、保障等各个岗位的负责人,第一时间拉好队伍,集结研讨,明确任务。
二是提前与被增援区域取得联系。
及时了解实时交通情况、具体救援任务、存在问题、装备需求、天气水文,把掌握的信息汇总决策,体现在作战意图上,第一时间掌握灾前、灾后图,进行对比分析是至关重要的。
三是从战略上谋划布局。
此次救援实战来看,救援任务重、情况复杂、难度大、面积广,人员装备相对分散,要根据实际情况,通盘科学调配,建立安全可靠的后方基地,确保各方保障,前置力量和装备要强弱搭配,优势互补。
2、形成独立高效的作战体系。
救援初期,到达现场的力量多且杂,要第一时间将救援区域划分标定,力量自成体系,可适当将地方救援力量纳入,发挥长处,切记煮大锅饭,一拥而上。
最高指挥员要纳入现场指挥部,参加指挥决策,针对自身队伍的救援能力和长处进行任务安排,要建立现场基地,确保后方人员轮休、物资保障有人管理且自成体系,舟艇靠岸要有接应和相对充裕的登陆区,确保独立作战,高效有序。
3、推动信息化与实战化相结合。
在救援过程中,使用无人机成像建模技术、LOCUS户外地图实时定位、声呐探测系统等技术用于辅助侦查研判,LOCUS户外地图实时定位系统解决了普通电子地图定位不准确、难以多人共享位置、无法显示行进路线等问题,通过实时定位系统确保了现场指挥员对全局的把握和对现场情况的实时掌握。
声呐探测系统在本次“三多一广”(急流多、暗礁多、污物多,面积广)的救援现场,可以很好地弥补人工探测水域深度有限等问题。
在现场,手机信号微弱,通讯不畅,实时定位是不准确的,可以尝试利用经纬度定位。
国产侧扫声呐在潜水作业中的应用研究

国产侧扫声呐在潜水作业中的应用研究摘要:本项目以某次打捞实例为研究对象,通过现场试验,研究我国自主研发的高频侧扫声纳在水上搜救中的应用效果,以及目前存在的问题,着重研究水下搜索与定位技术,为我国内河水库水域环境下的快速救援工作奠定理论基础。
关键词:侧扫声呐;水下搜救;水下目标搜寻;声呐图像;水下定位1.侧扫声呐成像原理侧扫式声纳一般是在机身两侧分别安装一组换能器,以实现对左、右两个方向的海底扫描。
在工作过程中,左右两个传感器同时发出同一频率的单频脉冲或线性调制脉冲,每一次发送完毕,都会立即进入接收状态,然后等待回波。
凸体硬底反射回波强度大,凹下软底反射波弱。
图1侧扫声呐结构图随着船舶的行驶,声纳基阵将持续地发送、接收已处理好的声波信号,并将其分解、加点滤波、补偿量化,经编码映射得到图像灰度。
图2侧扫声呐成像示意图当声纳运载器行进时,声纳会按照一定的运动参数设置一定的频率,将声波从左、右两个方向分别发送、接收,并将其与左、右两个方向的声波信号进行拼接,得到回波数据。
声纳对每一次接收到的回波信号进行编码,并对其头部和尾部进行加密处理,构成侧扫声呐瀑布布图。
在声波成像中,回波强度越大,图像中的图像也就越明亮,见图2中的4,5,6,10。
底部遮挡区无回声,在该图中显示为一块阴影区域,见图2.2的9波。
通常,声纳器材商也会在影像上添加颜色,这样就可以更容易地看到海底的起伏及障碍物。
2.侧扫声纳与潜水员协同配合方法2.1水下目标测定利用侧扫声呐实现大范围搜索,通过对侧扫声呐影像的分析,确定可疑目标点,初步探明潜航区水下环境。
确定了可能的目的地,他们就会制定出一套潜水计划,派出潜水员去探查目标,进行营救。
采用侧扫式声呐与潜水员协同工作,可有效地提高水下作业的安全性,并提高救援的效率。
2.2目标定位精度目标位置精度是指侧扫式声呐探测目标位置的精确距离。
通过对目标物的定位精度的分析,可以确定目标物的分布区,为制定潜水员的搜救计划提供参考。
提升应急救援能力的技术手段

,提高灾害预警和应急救援的针对性和有效性。
05
培训与演练技术
虚拟现实(VR)培训
总结词
通过模拟真实救援场景,提供沉浸式体验,帮助受训者熟悉应急 救援流程和操作。
详细描述
利用先进的虚拟现实技术,创建高度逼真的救援环境,让受训者 在模拟实践中学习正确的救援技巧和应对措施。这种培训方式能 够降低实际操作风险,提高训练效率和安全性。
灾害预警系统
1 2 3
地震预警系统
利用地震波传播速度与电磁波的差异,在地震发 生后迅速发出预警信号,为公众和应急救援部门 争取宝贵的逃生时间。
洪水预警系统
通过实时监测降雨量、水位、河流水质等数据, 预测洪水发生的时间和规模,及时发布预警信息 ,指导抗洪抢险工作。
火灾预警系统
利用红外线、烟雾等传感器技术,实时监测火灾 隐患,一旦发现火源立即发出警报,提高火灾扑 救的时效性。
THANK YOU
感谢聆听
技术手段在救援中的作用
在这些成功案例中,技术手段发挥了至关重要的作用。通过运用先进的技术手段,可以快 速获取灾区信息,准确判断救援方向,为救援队伍提供有力支持。
救援案例的启示
这些成功案例启示我们,提升应急救援能力需要注重技术手段的运用。通过不断引进和研 发新技术,可以有效提高救援效率和成功率。
技术在救援中的实际应用
在线演练平台
总结词
利用互联网和多媒体技术,构建在线 演练平台,方便救援人员随时随地进 行模拟演练。
详细描述
在线演练平台提供多种救援场景和任 务,供救援人员选择和挑战。通过在 线评估和反馈系统,帮助救援人员发 现和改进不足之处,提高应急反应和 救援能力。
救援技能电子教程
总结词
制作电子教程,详细介绍各种救援技能 和知识,方便救援人员随时查阅和学习 。
关于消防站参与水域救援应注意事项的思考

关于消防站参与水域救援应注意事项的思考摘要:近年来,水域救援成为消防救援队伍的一项重要任务,消防站参与水域救援情况日益增多,由于水域救援的特殊性,其救援任务具有不同于一般救援任务的特点。
为确保消防救援人员安全,本文结合目前消防部队水域救援方面存在的问题,就如何有效提高消防救援人员参与水域救援安全保障工作进行了思考,并提出了相应的对策建议,供消防部队参与水域救援参考。
关键词:消防站;水域救援;问题;注意事项引言近年来,随着经济社会的发展,水域面积的扩大,各类灾害事故发生的概率也在逐年增加,火灾、水灾、泥石流、山体滑坡等灾害事故时有发生。
这些灾害事故不仅威胁着人民群众的生命财产安全,也对消防部队救援力量提出了新的要求。
随着近年来水上救援力量建设的不断发展,消防部队水域救援能力也不断提高,加强对消防站水域救援的研究具有重要意义。
一、目前消防部队水域救援方面存在的问题1.水域救援力量建设相对滞后近年来,随着经济社会的快速发展,各类水域安全风险日益突出。
特别是随着当前经济社会发展进入新常态、水域面积不断扩大、各种灾害事故发生概率增加的情况下,消防部队水域救援力量建设相对滞后,在一定程度上影响了消防部队处置各类灾害事故能力的提升。
2.水域救援装备水平不高在当前水域救援装备器材发展过程中,虽然种类多、性能好,但存在一定程度的技术含量不高、针对性不强等问题。
在装备器材配备方面也存在一定的差距:一是部分装备器材仍属于淘汰产品;二是部分装备器材适用性不强;三是部分装备器材存在性能参数不全、适用性不强等问题;四是部分装备器材应急准备不足、保养维护不到位等问题。
二、消防站参与水域救援的注意事项1.正确认识水域救援在实际的水域救援中,消防救援人员既是救人的主体,也是保护自身安全的主体。
在对水域救援安全问题进行研究时可以发现,造成救援人员伤亡的因素有很多,如救援人员对水域情况不了解,缺乏安全防范意识;在水下环境复杂、恶劣天气频发时盲目下水;在水流湍急、能见度低的水域中盲目施救;救援人员自身安全意识淡薄,没有严格按照规定穿戴救生装备;对自身防护装备的使用方法不熟悉、不会使用;缺乏必要的安全知识培训等。
水域救援技术
水域救援技术
水域救援技术是指在水上进行的紧急救援操作中所涉及的技术和方法。
水域救援技术可以包括救生技术、人员搜救技术、溺水者复苏技术等多个方面。
以下是一些常见的水域救援技术:
1.救生技术:包括游泳、潜水、冲浪、帆板等在水上运动的救援方法,以及使用救生圈、急救橡皮艇等工具进行救援。
2.人员搜救技术:包括利用水面搜索器、声呐、潜水器等工具对水域进行搜索,以及蛙人搜救等技术。
3.溺水者复苏技术:包括心肺复苏术、人工呼吸等技术。
另外,水域救援技术还涉及到紧急情况下的应急措施和组织管理等方面。
为了确保救援行动的有效性和安全性,救援人员需要经过专业培训和训练,并遵守相关的安全标准和规定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
水域救援声呐作业指南电子版英文回答:
Water Rescue Sonar Operation Guide.
Introduction:
Water rescue sonar is a crucial tool used in search and rescue operations in water bodies. This guide aims to provide instructions on how to effectively operate a water rescue sonar.
1. Equipment Preparation:
Ensure that the sonar device is in good working condition and all components are properly connected.
Check the battery level and charge it if necessary.
Familiarize yourself with the control panel and
understand the functions of each button or knob.
2. Sonar Deployment:
Choose an appropriate location to deploy the sonar, preferably near the area of interest or where the victim is suspected to be.
Lower the sonar device into the water, ensuring that it is securely attached to the boat or any other floating platform.
Adjust the depth settings according to the water depth and the search area.
3. Sonar Operation:
Activate the sonar device and wait for it to initialize.
Adjust the frequency and gain settings to optimize the sonar image quality.
Interpret the sonar display to identify any potential targets or anomalies underwater.
Use the zoom function to focus on specific areas of interest.
Mark any potential targets or areas of interest on the sonar display for further investigation.
4. Search Techniques:
Conduct a systematic search pattern, such as a grid or spiral pattern, to cover the entire search area.
Maintain a slow and steady speed to ensure accurate sonar readings.
Pay attention to any changes in the sonar display, such as sudden depth variations or unusual shapes, which may indicate the presence of a victim or obstacles.
5. Communication and Coordination:
Maintain constant communication with other rescue team members to ensure effective coordination.
Share sonar findings and observations with the team to facilitate decision-making.
Follow any specific protocols or procedures established by the rescue organization.
Conclusion:
Water rescue sonar is a valuable tool in search and rescue operations. By following the guidelines provided in this operation guide, rescue teams can enhance their chances of locating and rescuing victims in water bodies.
中文回答:
水域救援声呐作业指南。
介绍:
水域救援声呐是在水域搜救行动中至关重要的工具。
本指南旨在提供有关如何有效操作水域救援声呐的指导。
1. 设备准备:
确保声呐设备工作正常,并且所有组件连接正确。
检查电池电量,并在需要时进行充电。
熟悉控制面板,并了解每个按钮或旋钮的功能。
2. 声呐部署:
选择适当的位置部署声呐,最好靠近感兴趣的区域或怀疑有被救者的地方。
将声呐设备放入水中,确保它牢固地固定在船上或其他浮动平台上。
根据水深和搜索区域调整深度设置。
3. 声呐操作:
激活声呐设备,并等待其初始化。
调整频率和增益设置,以优化声呐图像质量。
解读声呐显示,以识别水下潜在目标或异常。
使用缩放功能聚焦在感兴趣的特定区域。
在声呐显示上标记任何潜在目标或感兴趣的区域,以便进一步调查。
4. 搜救技巧:
进行系统的搜索模式,如网格或螺旋模式,以覆盖整个搜索区域。
保持缓慢而稳定的速度,以确保准确的声呐读数。
注意声呐显示的任何变化,如突然的深度变化或异常形状,这可能表明有被救者或障碍物存在。
5. 沟通和协调:
与其他救援队成员保持持续沟通,以确保有效的协调。
与团队分享声呐发现和观察,以促进决策。
遵循救援组织制定的任何特定协议或程序。
结论:
水域救援声呐是搜救行动中宝贵的工具。
通过遵循本操作指南提供的准则,救援队可以提高在水域中定位和营救被救者的机会。