延时程序
延时1us程序12mhz晶振c语言,51单片机KeilC延时程序的简单(晶振12MHz,一。。。

延时1us程序12mhz晶振c语⾔,51单⽚机KeilC延时程序的简单(晶振12MHz,⼀。
⼀. 500ms延时⼦程序void delay500ms(void){unsignedchari,j,k;for(i=15;i>0;i--)for(j=202;j>0;j--)for(k=81;k>0;k--);}产⽣的汇编:C:0x0800 7F0F MOV R7,#0x0FC:0x0802 7ECA MOV R6,#0xCAC:0x0804 7D51 MOV R5,#0x51C:0x0806 DDFE DJNZ R5,C:0806C:0x0808 DEFA DJNZ R6,C:0804C:0x080A DFF6 DJNZ R7,C:0802C:0x080C 22 RET计算分析:程序共有三层循环⼀层循环n:R5*2 = 81*2 = 162us DJNZ 2us⼆层循环m:R6*(n+3) = 202*165 = 33330us DJNZ 2us + R5赋值1us = 3us三层循环: R7*(m+3) = 15*33333 = 499995us DJNZ 2us + R6赋值1us = 3us循环外: 5us⼦程序调⽤2us +⼦程序返回2us + R7赋值1us = 5us延时总时间=三层循环+循环外= 499995+5 = 500000us =500ms计算公式:延时时间=[(2*R5+3)*R6+3]*R7+5⼆. 200ms延时⼦程序void delay200ms(void){unsignedchari,j,k;for(i=5;i>0;i--)for(j=132;j>0;j--)for(k=150;k>0;k--);}产⽣的汇编C:0x0800 7F05 MOV R7,#0x05C:0x0802 7E84 MOV R6,#0x84C:0x080C 22 RET三. 10ms延时⼦程序void delay10ms(void){unsignedchari,j,k;for(i=5;i>0;i--)for(j=4;j>0;j--)for(k=248;k>0;k--);}产⽣的汇编C:0x0800 7F05 MOV R7,#0x05C:0x0802 7E04 MOV R6,#0x04C:0x0804 7DF8 MOV R5,#0xF8C:0x0806 DDFE DJNZ R5,C:0806C:0x0808 DEFA DJNZ R6,C:0804C:0x080A DFF6 DJNZ R7,C:0802C:0x080C 22 RET四. 1s延时⼦程序void delay1s(void){unsignedcharh,i,j,k;for(h=5;h>0;h--)for(i=4;i>0;i--)for(j=116;j>0;j--)for(k=214;k>0;k--); }对1s延时的验证:1.设置仿真的晶振为12MHz2.在延时函数设置断点3.单步运⾏程序,到达延时函数的⼊⼝4.先记下进⼊延时函数的时间5.step out跳出函数,记下此时时间,两个时间相减即为延时函数运⾏时间函数运⾏时间=1.00041400-0.00041600≈1s产⽣的汇编C:0x0808 DCFE DJNZ R4,C:0808C:0x080A DDFA DJNZ R5,C:0806C:0x080C DEF6 DJNZ R6,C:0804C:0x080E DFF2 DJNZ R7,C:0802C:0x0810 22 RET在精确延时的计算当中,最容易让⼈忽略的是计算循环外的那部分延时,在对时间要求不⾼的场合,这部分对程序不会造成影响. void mDelay(unsigned int Delay) //Delay = 1000 时间为1S{unsignedinti;for(;Delay>0;Delay--){for(i=0;i<124;i ){;}}}void waitms(inti){charm;for( ; i ;i--){for(m = 203; m ; m--){_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();}}}延时1ms的函数时钟频率12MHzunsigned intsleepTime;unsingedchar inSleep = 0;void sleepService(void)}void isr_timer(void) //假定定时器中断1ms 中断⼀次。
单片机延时500ms程序汇编

单片机延时500ms程序汇编一、概述在单片机编程中,延时操作是非常常见且重要的一部分。
延时可以使程序在执行过程中暂停一段时间,以确保输入输出设备能够正常工作,或者是为了保护其他设备。
本文将介绍如何使用汇编语言编写单片机延时500ms的程序。
二、延时原理在单片机中,延时操作通常通过循环来实现。
每个循环需要一定的时间,通过控制循环次数和循环体内的指令数量,可以实现不同长度的延时。
在汇编语言中,可以使用计数器来控制循环次数,从而实现精确的延时操作。
三、汇编语言编写延时程序接下来,我们将使用汇编语言编写延时500ms的程序。
1. 设置计数器初值在程序的开头我们需要设置计数器的初值,这个初值需要根据单片机的工作频率和所需的延时时间来计算。
假设单片机的工作频率为1MHz,那么在循环500次后,就能够达到500ms的延时。
我们需要将计数器的初值设为500。
2. 循环计数接下来,我们进入一个循环,在循环中进行计数操作。
每次循环结束时,都需要检查计数器的值,当计数器减至0时,表示已经达到了500ms的延时时间,可以退出循环。
3. 优化程序为了提高程序的执行效率,可以对计数器进行优化。
例如可以通过嵌套循环的方式,减少循环的次数,从而提高延时的精度和稳定性。
四、程序示例下面是一个简单的示例程序,演示了如何使用汇编语言编写延时500ms的程序。
```org 0x00mov r2, #500 ; 设置计数器初值为500delay_loop:djnz r2, delay_loop ; 进行计数ret ; 延时结束,退出程序```五、结语通过以上的示例程序,我们可以看到如何使用汇编语言编写单片机延时500ms的程序。
当然,实际的延时程序可能会更加复杂,需要根据具体的单片机型号和工作频率进行调整,但是思路是相似的。
在实际的编程中,需要根据具体的需求和硬件环境来进行调整和优化,以实现更加稳定和精确的延时操作。
希望本文对单片机延时程序的编写有所帮助,也欢迎大家在评论区提出宝贵意见和建议。
单片机延时程序

实验一单片机延时程序实验一、实验目的与要求:在使用4MH在外部晶体振荡器的PIC16F877A上用软件设计一个20ms的软件延时子程序。
另外,还要求用MPLAB的软件模拟器及其附带的软件工具窗口stopwatch观测延时程序执行的时间。
二、实验内容:1.硬件电路设计:本实验中用的是软件延时,利用循环来实现延时功能。
电路就用了单片机的原本电路。
没有用到其他的功能模块,单片机与ICD3相连接。
2.软件设计思路:单片机软件延时的前提和根底是每条指令的执行时间是固定的,且大局部指令的执行时间是一样的。
这要求对每条指令所花费的指令周期〔Tcy〕做到心中有数。
指令集中5条无条件跳转指令GOTO,CALL.RETURN,RETLW和RETFIE,由于它们必然引起程序跳转,造成流水线中断,因此肯定将占用2个指令周期。
而其他4条有可能引起程序跳转的条件跳转指令DECFSZ,INCFSZ,BTFSC和,BTFSS的执行时间,需要占用2个指令周期,当条件为假不发生跳转时,仅占用1个指令周期。
其余所有指令都只用1个指令周期。
每个指令周期Tcy的时间长度,计算方法:如果采用4MHz 的外部晶体〔fosc=4 MHz〕,那么PIC中档单片机的指令周期Tcy为1us,这是一个整数。
而采用其他频率的外部晶体时,指令周期时间将反比于外部晶体频率。
至于软件延时的构造和实现方法,其实可以采用任何指令和构造,因为只是通过执行指令消耗时间。
但通常情况下有两个选择延时程序构造的原那么:(1)执行指令周期数计算方便。
如果含有太多复杂的条件跳转循环等构造势必会造成指令周期的计算困难,甚至可能造成执行所造成的软件延时时间不等。
(2)不能占用太多的程序空间。
试想用20000个NOP指令来实现20ms的延时,显然是可以的,但是这样做浪费了整整一个页的程序存储器,得不偿失,而通过适当的循环构造,重复执行某些一样的程序是比拟合理的方法。
因此,软件延时程序一般采用以下方法:如果延时时间短〔微妙级别〕,可以连续插入几条NOP指令;如果延时时间长〔几个毫秒级别〕,那么可以使用双嵌套循环的方法来实现。
新手常用单片机延时程序

_NOP_( );
}
/*****************11us延时函数*************************/
//
void delay(uint t)
{
for (;t0;t--);
}
1ms延时子程序(12MHZ)
void delay1ms(uint p)//12mhz
DELAY:CLR EX0
MOV TMOD,#01H ;设置定时器的工作方式为方式1
MOV TL0,#0B0H ;给定时器设置计数初始值
MOV TH0,#3CH
SETB TR0;开启定时器
HERE:JBC TF0,NEXT1
SJMP HERE
NEXT1:MOV TL0,#0B0H
MOVTH0,#3CH
DJNZ R7,HERE
CLR TR0;定时器要软件清零
SETB EX0
RET
C语言延时程序:
void delay_18B20(unsigned inti)
{
while(i--);
}
void Delay10us( )//12mhz
{
_NOP_( );
_NOP_( );
_NOP_( );
_NOP_( );
延时则应该注意晶振的频率是多大。
软件延时:(asm)
晶振12MHZ,延时1秒
程序如下:
DELAY:MOV 72H,#100
LOOP3:MOV 71H,#100
LOOP1:MOV 70H,#47
LOOP0JNZ 70H,LOOP0
NOP
DJNZ 71H,LOOP1
MOV 70H,#46
LOOP2JNZ 70H,LOOP2
各种汇编延时程序大集合

MOV TL0,#0B0H
MOV R4, #10
SETB ET0
SETB EA
SETB TR0
SJMP $ ;
RET
DELAY: ;延时子程序(1秒)
MOV R0,#0AH
DELAY1: MOV R1,#00H
DELAY2: MOV R2,#0B2H
DJNZ ห้องสมุดไป่ตู้2,$
DJNZ R1,DELAY2
DJNZ R0,DELAY1
RET
MOV R2,#10 ;延时1秒
LCALL DELAY
*r5+5
DEL : MOV R5,#08H
DEL1: MOV R6,#0FFH
DEL2: MOV R7,#0FFH
DJNZ R7,$
DJNZ R6,DEL2
DJNZ R5,DEL1
RET
;1秒延时子程序是以12MHz晶振
POP R0
POP R1
POP R2
RET
1:DEL: MOV R7, #200
DEL1: MOV R6, #123
NOP
DEL2: DJNZ R6, DEL2
D52: NOP
NOP
NOP
NOP
DJNZ R6,D52
DJNZ R7,D51
POP PSW
RET
DELAY: ;延时1毫秒
PUSH PSW
SETB RS0
MOV R7,#50
D1: MOV R6,#10
D2: DJNZ R6,$
DJNZ R7,D1
汇编延时程序讲解

延时程序在单片机编程中使用非常广泛,但一些读者在学习中不知道延时程序怎么编程,不知道机器周期和指令周期的区别,不知道延时程序指令的用法, ,本文就此问题从延时程序的基本概念、机器周期和指令周期的区别和联系、相关指令的用法等用图解法的形式详尽的回答读者我们知道程序设计是单片机开发最重要的工作,而程序在执行过程中常常需要完成延时的功能。
例如在交通灯的控制程序中,需要控制红灯亮的时间持续30秒,就可以通过延时程序来完成。
延时程序是如何实现的呢?下面让我们先来了解一些相关的概念。
一、机器周期和指令周期1.机器周期是指单片机完成一个基本操作所花费的时间,一般使用微秒来计量单片机的运行速度,51 单片机的一个机器周期包括12 个时钟振荡周期,也就是说如果51 单片机采用12MHz 晶振,那么执行一个机器周期就只需要1μs;如果采用的是6MHz 的晶振,那么执行一个机器周期就需要2 μs。
2 .指令周期是指单片机执行一条指令所需要的时间,一般利用单片机的机器周期来计量指令周期。
在51 单片机里有单周期指令(执行这条指令只需一个机器周期),双周期指令(执行这条指令只需要两个机器周期),四周期指令(执行这条指令需要四个机器周期)。
除了乘、除两条指令是四周期指令,其余均为单周期或双周期指令。
也就是说,如果51 单片机采用的是12MHz 晶振,那么它执行一条指令一般只需1~2 微秒的时间;如果采用的是6MH 晶振,执行一条指令一般就需2~4 微秒的时间。
现在的单片机有很多种型号,但在每个型号的单片机器件手册中都会详细说明执行各种指令所需的机器周期,了解以上概念后,那么可以依据单片机器件手册中的指令执行周期和单片机所用晶振频率来完成需要精确延时时间的延时程序。
二、延时指令在单片机编程里面并没有真正的延时指令,从上面的概念中我们知道单片机每执行一条指令都需要一定的时间,所以要达到延时的效果,只须让单片机不断地执行没有具体实际意义的指令,从而达到了延时的效果。
c语言延时程序的计算方法经典
for(k=81;k>0;k--);
}
下面是用了8.0000MHZ的晶振的几个延时程序(用定时0的工作模式1):
(1)延时0.9MS
void delay_0_9ms(void)
{
TMOD=0x01; /*定时器0工作在模式1下(16位计数器)*/
TH0=0xfd;
Loop2: djnz r6, loop2; djnz双周期指令
Djnz r7, loop1,
延时时间=T+i*T+i*j*2T+i*2T
下面几个是单片机的延时程序(包括asm和C程序,都是我在学单片机的过程中用到的),在单片机延时程序中应考虑所使用的晶振的频率,在51系列的单片机中我们常用的是11.0592MHz和12.0000MHz的晶振,而在AVR单片机上常用的有8.000MHz和4.000MH的晶振所以在网上查找程序时如果涉及到精确延时则应该注意晶振的频率是多大。
{
unsigned char i,j,k;
for(i=5;i>0;i--)
for(j=132;j>0;j--)
for(k=150;k>0;k--);
}
500ms延时子程序程序:(12MHZ)
void delay500ms(void)
{
unsigned char i,j,k;
for(i=15;i>0;i--)
DJNZ R7,HERE
CLR TR0 ;定时器要软件清零
SETB EX0
RET
C语言延时程序:
10ms延时子程序(12MHZ)
void delay10ms(void)
{
用汇编语言编写1ms延时程序

用汇编语言编写1ms延时程序实验题目:设计延时时间1ms的程序实验目的:通过该延时时间程序的实验设计,了解运行程序时的我们可以通过该程序进行程序的延时操作,以便达到我们的操作目的。
实验设备:计算机一台。
实验程序:参考附录A实验内容:题目分析:题目是让计算机做一些无用的操作,来拖延时间。
可以根据一条指令执行时间需要几个时钟周期,即几个微妙,来编程延时程序,也就可以利用循环程序结构。
由查表可得,我们可以用PUSHF和POPF指令来进行编程。
而延时的时间主要取决于循环体及循环次数。
而PUSHF和POPF指令分别为10和8个时钟节拍,LOOP BX指令为3.4个时钟节拍,即此循环体需要用10+8+3.4=21.4拍,而每个时钟节拍是根据此系统的晶振频率而定的。
假设系统用的是8Mhz的晶振,则每个时钟节拍需要0.125μs,因此我们可以根据下列公式算出循环次数:换算成十六进制数为176H。
下图为程序流程图:六、实验总结:此程序中内循环是1ms时间,而在外循环中的两条控制指令DEC和JNZ所对应的时钟节拍分别为2个和4个,一共只需0.75μs,与1ms比较极短,所以我们在外循环里忽略不计了,外循环的循环初值为1000次,对应的十六进制为3E8H。
有时候我们需要计算机为我们“空”一点时间来进行空操作,即什么也不用做,我们可以通过上述的延时时间子程序来达到目的。
附录A延时1ms的程序如下:START: MOV CX,176H ;初始化,设定循环次数CX=376LP1:PUSHF ;循环体POPFLOOP LP1 ; CX CX-1,若CX0转LP1HLT ;暂停延时1s的程序如下:MOV BX,3E8H ; BX 1000LP2:MOV CX,176HLP1: PUSHFPOPF 延时1ms程序段LOOP LP1DEC BXDEC BX ; BX BX-1JNZ LP2 ;ZF=0时,转至LP2,即BX0时转HLT ;暂停参考文献郑学坚,周斌编著.微型计算机原理及应用(第三版).清华大学出版社.2001。
数码管动态延时程序设计

数码管动态延时程序设计
摘要:
1.延时程序的作用
2.延时时间的选择
3.数码管动态显示程序设计
4.51 单片机控制2 位一体数码管动态实现00 到23
5.定时器控制数码管动态显示年月日与时分秒
正文:
在数码管动态显示程序设计中,延时程序发挥着重要作用。
它的主要功能是保持当前显示数码管足够时间,同时稳定显示效果,以形成视觉暂留。
这样一来,人眼就能在一定时间内持续感知到显示的内容。
延时时间的长短是一个关键参数,需要根据具体情况进行选择。
一般来说,延时时间应该大于2 毫秒。
这是因为人眼的视觉暂留极限大约为40 毫秒,所以所有数码管一次扫描完成的总时间不能超过40 毫秒。
如果延时时间过短,显示效果可能会出现闪烁或不稳定的情况。
在实际的数码管动态显示程序设计中,我们可以借助51 单片机来实现2 位一体数码管的动态显示。
例如,可以通过定义一个数组来存储所有可能的数码管显示组合,然后使用定时器中断来控制数码管的显示顺序。
这样,就可以实现从00 到23 的动态显示效果。
另外,我们还可以使用定时器来控制数码管动态显示年月日与时分秒。
在这个例子中,可以将8 个数码管分为两组,分别显示年月日和时分秒。
为了实现这个功能,我们需要编写一个延时程序来控制定时器的中断。
这样,在定时
器中断触发时,就可以将当前显示的数码管状态保存下来,并切换到下一个显示状态。
总之,数码管动态显示程序设计涉及到多个方面的技术,包括延时程序、定时器控制以及单片机的硬件操作。
延时程序

;50毫秒延时程序(12M晶振)
YS05S: MOV R7,#200 ;单周期指令(1uS)
D1: MOV R6,#125 ;单周期指令(1uS)
DJNZ R6,$ ;双周期指令(2uS)该指令自身执行R5次
DJNZ R7,D1 ;双周期指令(2uS)D1执行R7次
RET ;双周期指令(2uS)
;0.1秒延时程序(12M晶振)
YS01S: MOV R7,#200 ;单周期指令(1uS)
D1: MOV R6,#250 ;单周期指令(1uS)
DJNZ R7,D1 ;双周期指令(2uS)D1执行R7次
RET ;双周期指令(2uS)
;1秒延时程序(12M晶振)
YS1S: MOV R7,#100 ;单周期指令(1uS)
D1: MOV R6,#100 ;单周期指令(1uS)
D2: MOV R5,#47 ;单周期指令(1uS)
NOP
DJNZ R5,$ ;双周期指令(2uS)该指令自身执行R5次
DJNZ R6,D2 ;双周期指令(2uS)D1执行R6次
DJNZ R7,D1 ;双周期指令(2uS)D1执行R7次
DJNZ R6,D1 ;双周期指令(2uS)D1执行R6次
DJNZ R7,D1 ;双周期指令(2uS)D1执行R7次
NOP
RET ;双周期指令(2uS)
RET ;双周期指令(2uS)
;1秒延时程序(12M晶振)
YS1S: MOV R7,#08H ;单周期指令(1uS)
D1: MOV R6,#0F4H ;单周期指令(1uS)
D2: MOV R5,#0FFH ;单周期指令(1uS)
汇编延时程序
DELAY:MOV R4,#2 ;延时子程序,12M晶振延时约1秒L3: MOV R2 ,#255L1: MOV R3 ,#255L2: DJNZ R3 ,L2DJNZ R2 ,L1DJNZ R4 ,L3RET这里的延时不是很精确..谁能给个精确点的数..R2,R3,R4DELAY:MOV R4,#25 ;延时子程序,12M晶振延时1.001秒L3: MOV R2 ,#200L1: MOV R3 ,#248L2: DJNZ R3 ,L2DJNZ R2 ,L1DJNZ R4 ,L3RET计算延时时间应注意以下几点:1、晶振跑多少的,象这里的6M的话,那么它执行的机器周期就是2us,2、看指令执行要多少个机器周期,向DJNZ、RET都要两个机器周期,3、那么,这里总共时间是26(1A)*255(0FF)*255(0FF)*2(机器周期)*2us(1个机器周期的时间)=6762600us 若要精确计算的话要加上上面赋值的时间和子程序返回的时间。
不过一般只要计算到上面就行了,因为赋值和返回指令的时间很短(相对于整个延时程序来说)希望对你有所帮助...51单片机 Keil C 延时程序的简单研究应用单片机的时候,经常会遇到需要短时间延时的情况。
需要的延时时间很短,一般都是几十到几百微妙(us)。
有时候还需要很高的精度,比如用单片机驱动DS18B20的时候,误差容许的范围在十几us以内,不然很容易出错。
这种情况下,用计时器往往有点小题大做。
而在极端的情况下,计时器甚至已经全部派上了别的用途。
这时就需要我们另想别的办法了。
以前用汇编语言写单片机程序的时候,这个问题还是相对容易解决的。
比如用的是12MHz晶振的51,打算延时20us,只要用下面的代码,就可以满足一般的需要:mov r0, #09hloop: djnz r0, loop51单片机的指令周期是晶振频率的1/12,也就是1us一个周期。
mov r0, #09h需要2个极其周期,djnz也需要2个极其周期。
C语言延时程序

标准的C语言中没有空语句。
但在单片机的C语言编程中,经常需要用几个空指令产生短延时的效果。
这在汇编语言中很容易实现,写几个nop就行了。
在keil C51中,直接调用库函数:#include<intrins.h> // 声明了void _nop_(void);_nop_(); // 产生一条NOP指令作用:对于延时很短的,要求在us级的,采用“_nop_”函数,这个函数相当汇编NOP 指令,延时几微秒。
NOP指令为单周期指令,可由晶振频率算出延时时间,对于12M晶振,延时1uS。
对于延时比较长的,要求在大于10us,采用C51中的循环语句来实现。
在选择C51中循环语句时,要注意以下几个问题第一、定义的C51中循环变量,尽量采用无符号字符型变量。
第二、在FOR循环语句中,尽量采用变量减减来做循环。
第三、在do…while,while语句中,循环体内变量也采用减减方法。
这因为在C51编译器中,对不同的循环方法,采用不同的指令来完成的。
下面举例说明:unsigned char I;for(i=0;i<255;i++);unsigned char I;for(i=255;i>0;i--);其中,第二个循环语句C51编译后,就用DJNZ指令来完成,相当于如下指令:MOV09H,#0FFHLOOP:DJNZ09H,LOOP指令相当简洁,也很好计算精确的延时时间。
同样对do…while,while循环语句中,也是如此例:unsigned char n;n=255;do{n--}while(n);或n=255;while(n){n--};这两个循环语句经过C51编译之后,形成DJNZ来完成的方法,故其精确时间的计算也很方便。
其三:对于要求精确延时时间更长,这时就要采用循环嵌套的方法来实现,因此,循环嵌套的方法常用于达到ms级的延时。
对于循环语句同样可以采用for,do…while,while结构来完成,每个循环体内的变量仍然采用无符号字符变量。
汇编延时1s的延时子程序

汇编延时1s的延时子程序一、延时子程序的概念延时子程序是指在程序中设置一个时间延迟,使得程序在执行到该子程序时暂停一段时间后再继续执行下一条指令。
在汇编语言中,常用的延时子程序有软件延时和硬件延时两种。
二、软件延时的实现方法1. 循环计数法循环计数法是一种简单而常用的软件延时方法。
其原理是利用CPU进行循环计数,当计数器达到设定值后,即完成了指定的时间延迟。
2. 空循环法空循环法是在循环体内不执行任何有意义的操作,只进行空转等待的方法。
其原理是利用CPU进行忙等待,当指定的时间到达后再继续执行下一条指令。
三、硬件延时的实现方法硬件延时是通过外部电路或芯片来实现的。
常用的硬件延时器有555定时器和8254可编程定时器等。
四、汇编语言实现1s延时子程序以下以循环计数法为例,介绍如何使用汇编语言实现1s延时子程序。
1. 程序思路:(1)将需要等待的时间转换为机器周期;(2)循环计数,当计数器达到指定值时,跳出循环。
2. 程序代码:delay:mov cx, 0FFFFh ;将计数器初始化为最大值mov dx, 0FFFFhdelay1:loop delay1 ;循环计数dec dx ;减少dx的值jnz delay1 ;如果dx不为0,则继续循环dec cx ;减少cx的值jnz delay1 ;如果cx不为0,则继续循环ret ;延时结束,返回3. 程序说明:(1)mov cx, 0FFFFh:将CX寄存器初始化为最大值,即65535;(2)mov dx, 0FFFFh:将DX寄存器初始化为最大值,即65535;(3)loop delay1:循环计数,每次减少CX的值,当CX的值为0时跳出循环;(4)dec dx:每次减少DX的值;(5)jnz delay1:如果DX的值不为0,则跳转到delay1标号处继续执行循环;(6)dec cx:每次减少CX的值;(7)jnz delay1:如果CX的值不为0,则跳转到delay1标号处继续执行循环;(8)ret:延时结束,返回。
汇编语言编写软件延时程序

R0,#250
;设置内循环次数n0
;内循环语句,运行n0次
; 中循环语句,运行n1次
DEL0:DJNZ R0,DEL0 DJNZ R1,DEL1 DJNZ R2,DEL2
;外循环语句,运行n2次
演示
任务要求:汇编语言编写软件延时程序 ——以单片机控制LED灯的闪烁为例
任务实施步骤
Step 1
Step 2
Step?次
n=t/2T=1s/2us=5000000次 MOV R0,#5000000
╳
单片机工作寄存器只能接收8位的数据,不能大于255 外循环n2=10次 t=1s
如何获得 1s延时时 间?
多 重 循 环
外循环n1=2000次 中循环n1=200次 t=100ms 内 循环 n0=250次 t=500us
MAIN: CLR
调用子程序
ACALL DEL SETB P0.0 ACALL DEL SJMP MAIN
子程序入口地址
DEL:
MOV MOV MOV
R2,#10 R1,#200 R0,#250
;1us,设定外循环10次 ;1us,设定中循环100次 ;1us,设定内循环250次
延 时 子 程 序
Step 3
软件延时程序 解析
软件延时程序 编写
软件延时程序 应用
知 识 点 小 结
Step 3 软件延时程序应用 如何应用软件延时程序实现 LED灯的闪烁?
软件延时子程序
子程序三要素:调用指令、子程序入口地址、返回指令。 (1)主程序调用子程序:ACALL \ LCALL (2)子程序的入口地址:子程序的第一条指令的地址称
从内向外逐层构建循环结构
单片机延时子程序

单片机延时子程序下面几个是单片机的延时程序(包括asm和C程序,都是我在学单片机的过程中用到的),在单片机延时程序中应考虑所使用的晶振的频率,在51系列的单片机中我们常用的是和的晶振,而在AVR单片机上常用的有和的晶振所以在网上查找程序时如果涉及到精确延时则应该注意晶振的频率是多大。
软件延时:(asm)晶振12MHZ,延时1秒程序如下:DELAY:MOV 72H,#100LOOP3:MOV 71H,#100LOOP1:MOV 70H,#47LOOP0:DJNZ 70H,LOOP0NOPDJNZ 71H,LOOP1MOV 70H,#46LOOP2:DJNZ 70H,LOOP2NOPDJNZ 72H,LOOP3MOV 70H,#48LOOP4:DJNZ 70H,LOOP4定时器延时:晶振12MHZ,延时1s,定时器0工作方式为方式1DELAY1:MOV R7,#0AH ;; 晶振12MHZ,延时秒AJMP DELAYDELAY2:MOV R7,#14H ;; 晶振12MHZ,延时1秒 DELAY:CLR EX0MOV TMOD,#01H ;设置定时器的工作方式为方式1MOV TL0,#0B0H ;给定时器设置计数初始值MOV TH0,#3CHSETB TR0 ;开启定时器 HERE:JBC TF0,NEXT1SJMP HERENEXT1:MOV TL0,#0B0HMOV TH0,#3CHDJNZ R7,HERECLR TR0 ;定时器要软件清零SETB EX0RETC语言延时程序:10ms延时子程序(12MHZ)void delay10ms(void){unsigned char i,j,k;for(i=5;i>0;i--)for(j=4;j>0;j--)for(k=248;k>0;k--); }1s延时子程序(12MHZ)void delay1s(void){unsigned char h,i,j,k;for(h=5;h>0;h--)for(i=4;i>0;i--)for(j=116;j>0;j--)for(k=214;k>0;k--); }200ms延时子程序(12MHZ)void delay200ms(void){unsigned char i,j,k;for(i=5;i>0;i--)for(j=132;j>0;j--)for(k=150;k>0;k--); }500ms延时子程序程序: (12MHZ)void delay500ms(void){unsigned char i,j,k;for(i=15;i>0;i--)for(j=202;j>0;j--)for(k=81;k>0;k--);}下面是用了的晶振的几个延时程序(用定时0的工作模式1):(1)延时void delay_0_9ms(void){TMOD=0x01; /*定时器0工作在模式1下(16位计数器)*/ TH0=0xfd;TL0=0xa8;TR0=1; /*启动定时器*/while(TF0==0);TR0=0;}(2)延时1MSvoid delay_1ms(void){TMOD=0x01; /*定时器0工作在模式1下(16位计数器)*/TH0=0xfd;TL0=0x65;TR0=1; /*启动定时器*/while(TF0==0);TR0=0;}(3)延时void delay_4_5ms(void){TMOD=0x01; /*定时器0工作在模式1下(16位计数器)*/TH0=0xf4;TL0=0x48;TR0=1; /*启动定时器*/while(TF0==0);TR0=0;}在用定时器做延时程序时如果懒得计算定时器计数的初始值可以在网上找一个专门用来做延时的小软件。
延时程序计算公式
延时程序计算公式CV A VR中提供了2个延时函数:The functions are:void delay_us(unsigned int n)generates a delay of n mseconds. n must be a constant expression.void delay_ms(unsigned int n)generates a delay of n milliseconds.This function automatically resets the watchdog timer every 1ms by generating the wdr instruction.其中delay_us(unsigned int n)要求n是常数,因为us要准确,使用变量的话会大大影响精度。
1us执行的指令不多。
在C程序中调用delay_us()后,你可以看生成的ASM代码,它不是使用CALL,而是用的宏,嵌入了一段代码。
当你系统时钟为1M时,调用delay_us(1)还会编译出错,因为嵌入的一段代码,已经超过了1us!而delay_ms(unsigned int n)中的N就可以是变量,它生成的汇编是采用CALL调用函数,两者不同。
另外,在delay_ms()中还清WDT(就是你使用了WDT,也能使用该函数)。
作为通用的delay_ms(),代码当然多了点。
以上可以查看CV A VR编译后产生的LST文件。
1。
没有好的汇编基础,和对A VR的彻底透彻的掌握,一般人写不出比它还要优化的通用代码。
2。
我已经说过多少遍了。
在实际的系统中尽量不要使用软件延时,浪费资源不说,系统很难做到并行处理。
因此对于10us以下的延时,考虑直接嵌入汇编的_nop_指令。
10-100us可以适当考虑使用delay_us(),而大于100us的延时,应该采用定时器中断了。
/************************************************************** ****/A VR单片机的指令,从执行每条指令的时钟数分:单时钟指令、双时钟指令、三时钟指令、四时钟指令4种,A VR单片机在外接8MHZ 晶振时,单时钟指令:ADC为例,每us(微秒)可以执行8条,即每条指令用时0.125us。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
N N
Y
Y
N
Y
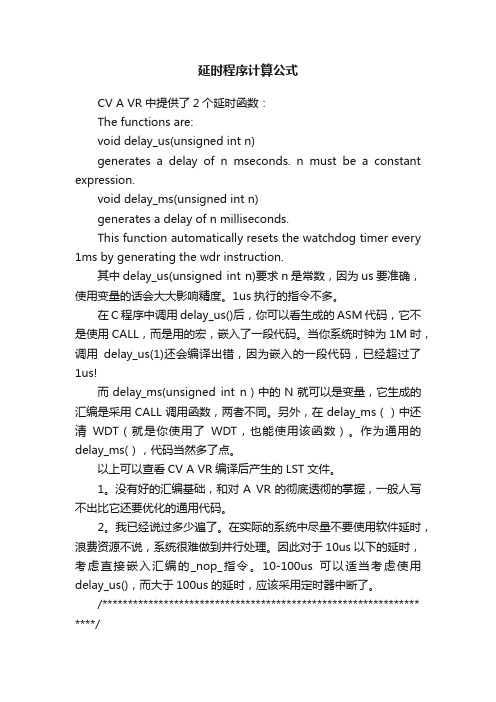
例:设单片机的晶振频率为6MHz,编写一段延时程序约 设单片机的晶振频率为 ,编写一段延时程序约100ms 的子程序。 的子程序。 Delay: MOV R7,#64H 1T;设循环计数器初值 设循环计数器初值(100次) , 次 LOOP: MOV R6,#0FAH 1T ;循环 循环250次(250×4=1ms) : , 次 × DJNZ R6,$ ,$ 2T ;循环控制 DJNZ R7,LOOP 2T , RET 2T T=12/6 MHz=2µs t=2µs+100×(2µs+1ms+2×2µs)+4µs × × =100.606 ms
例:利用DJNZ指令设计循环延时程序,已知fosc=12MHz。 1) 单循环延时: DELAY: MOV R7,#10 ;1T DJNZ R7,$ ;2T △t=2×1µs×10+1×1µs=21µs 2) 双重循环延时: DELAY: MOV R7,#0AH ;1T DL: MOV R6,#64H ;1T DJNZ R6,$ ;2T DJNZ R7,DL ;2T △t=(2µs×100+2+1)×10+1=2031µs T=12/12MHz=1µs
系统中, 在MCS-51系统中,通常用 系统中 通常用DJNZ指令来构造 指令来构造 循环结构,实现重复处理。 循环结构,实现重复处理。
循环结构包括 初始化 循环体 控制变量的修改 循环次数的控制 循环控制方法: 循环控制方法: 计数控制; 计数控制; 特征标志控制。 特征标志控制。
• • • • • • • • • • • •
3.减1不为零转移指令 . 不为零转移指令 这种指令是先减1后判断 若不为零则转移。 后判断, 这种指令是先减 后判断,若不为零则转移。 指令有两条: 指令有两条: DJNZ Rn,rel 字节指令, 周期指令 周期指令) , (2字节指令,2周期指令) 字节指令 中的内容减1, ;先Rn中的内容减 , 中的内容减 再判断Rn中的内容是否等于零 中的内容是否等于零, 再判断 中的内容是否等于零, 若不为零,则转移。 若不为零,则转移。 DJNZ direct,rel ( 3字节指令,2周期指令) 字节指令, 周期指令 周期指令) , 字节指令 ;先(direct)中的内容减 , )中的内容减1, 再判断( 再判断(direct)中的内容是否等于零,若不为 )中的内容是否等于零, 则转移。 零,则转移。
习题:当循环计数器初值为0,循环次数有多少? 习题:当循环计数器初值为0 循环次数有多少?
例:本单片机的晶振频率为8MHz,编写一段延时程序约 的子 本单片机的晶振频率为 ,编写一段延时程序约1s的子 程序。 程序。
delay: mov r7,#70 loop0: mov r6,#100 loop1: mov r5,#100 djnz r5,$ djnz r6,loop1 djnz r7,loop0 nop ret end
• 3) 三重循环延时: • DELAY:MOV R7,#10 • DL2: MOV R6,#200 • DL1: MOV R5,#250 • DJNZ R5, $ • DJNZ R6, DL1 • DJNZ R7, DL2 • • △t=(((2us×250+2+1) • ×200)+2+1) • ×10+1 • = 1006031µs • ≈1秒
T=12/8 MHz=1.5µs t≈70*100*100*1.5us ≈ 1s