单片机延时程序分析
单片机延时500ms程序汇编

单片机延时500ms程序汇编一、概述在单片机编程中,延时操作是非常常见且重要的一部分。
延时可以使程序在执行过程中暂停一段时间,以确保输入输出设备能够正常工作,或者是为了保护其他设备。
本文将介绍如何使用汇编语言编写单片机延时500ms的程序。
二、延时原理在单片机中,延时操作通常通过循环来实现。
每个循环需要一定的时间,通过控制循环次数和循环体内的指令数量,可以实现不同长度的延时。
在汇编语言中,可以使用计数器来控制循环次数,从而实现精确的延时操作。
三、汇编语言编写延时程序接下来,我们将使用汇编语言编写延时500ms的程序。
1. 设置计数器初值在程序的开头我们需要设置计数器的初值,这个初值需要根据单片机的工作频率和所需的延时时间来计算。
假设单片机的工作频率为1MHz,那么在循环500次后,就能够达到500ms的延时。
我们需要将计数器的初值设为500。
2. 循环计数接下来,我们进入一个循环,在循环中进行计数操作。
每次循环结束时,都需要检查计数器的值,当计数器减至0时,表示已经达到了500ms的延时时间,可以退出循环。
3. 优化程序为了提高程序的执行效率,可以对计数器进行优化。
例如可以通过嵌套循环的方式,减少循环的次数,从而提高延时的精度和稳定性。
四、程序示例下面是一个简单的示例程序,演示了如何使用汇编语言编写延时500ms的程序。
```org 0x00mov r2, #500 ; 设置计数器初值为500delay_loop:djnz r2, delay_loop ; 进行计数ret ; 延时结束,退出程序```五、结语通过以上的示例程序,我们可以看到如何使用汇编语言编写单片机延时500ms的程序。
当然,实际的延时程序可能会更加复杂,需要根据具体的单片机型号和工作频率进行调整,但是思路是相似的。
在实际的编程中,需要根据具体的需求和硬件环境来进行调整和优化,以实现更加稳定和精确的延时操作。
希望本文对单片机延时程序的编写有所帮助,也欢迎大家在评论区提出宝贵意见和建议。
单片机 延时 计算
单片机延时计算单片机是一种集成电路,具有微处理器、存储器和输入输出接口等功能。
在单片机的应用中,延时计算是一项重要的操作。
延时计算指的是在程序中通过控制单片机的时钟信号来实现一定的时间延迟。
延时计算常用于控制设备的时间间隔、时序控制等方面。
在单片机中,延时计算可以通过软件延时和硬件延时两种方式实现。
软件延时是通过在程序中循环执行一定的指令次数来实现延时,而硬件延时是通过控制单片机的时钟频率来实现延时。
软件延时是一种简单常用的延时计算方法。
在软件延时中,我们可以使用循环来实现延时。
通过控制循环次数,可以实现不同的延时时间。
例如,我们可以使用一个循环来延时1毫秒,使用多个循环来延时更长的时间。
软件延时的精度相对较低,受到单片机的工作频率、指令执行速度等因素的影响。
硬件延时是一种更精确的延时计算方法。
在硬件延时中,我们可以通过改变单片机的时钟频率来控制延时时间。
通过控制时钟频率,可以实现微秒级别的延时。
硬件延时的精度相对较高,但需要对单片机的时钟系统进行配置和调整。
延时计算在单片机的应用中非常重要。
在控制设备的时间间隔方面,延时计算可以实现设备的周期性工作。
例如,可以通过延时计算来控制LED灯的闪烁频率,实现呼吸灯效果。
在时序控制方面,延时计算可以实现不同操作之间的时间间隔。
例如,可以通过延时计算来控制舵机的旋转角度和速度。
延时计算的实现方法有很多种,可以根据具体需求选择合适的方法。
在选择延时计算方法时,需要考虑延时的精度、可靠性和资源占用等因素。
同时,还需要根据单片机的工作频率和指令执行速度等参数进行调整和优化。
延时计算在单片机的应用中起着重要的作用。
通过延时计算,可以实现对设备的精确控制和时序管理。
延时计算的方法和技巧也是单片机程序设计中的重要内容之一。
通过深入了解和研究延时计算,可以提高单片机程序的可靠性和性能。
希望通过本文的介绍,读者对延时计算有更深入的了解和认识。
单片机延时程序

实验一单片机延时程序实验一、实验目的与要求:在使用4MH在外部晶体振荡器的PIC16F877A上用软件设计一个20ms的软件延时子程序。
另外,还要求用MPLAB的软件模拟器及其附带的软件工具窗口stopwatch观测延时程序执行的时间。
二、实验内容:1.硬件电路设计:本实验中用的是软件延时,利用循环来实现延时功能。
电路就用了单片机的原本电路。
没有用到其他的功能模块,单片机与ICD3相连接。
2.软件设计思路:单片机软件延时的前提和根底是每条指令的执行时间是固定的,且大局部指令的执行时间是一样的。
这要求对每条指令所花费的指令周期〔Tcy〕做到心中有数。
指令集中5条无条件跳转指令GOTO,CALL.RETURN,RETLW和RETFIE,由于它们必然引起程序跳转,造成流水线中断,因此肯定将占用2个指令周期。
而其他4条有可能引起程序跳转的条件跳转指令DECFSZ,INCFSZ,BTFSC和,BTFSS的执行时间,需要占用2个指令周期,当条件为假不发生跳转时,仅占用1个指令周期。
其余所有指令都只用1个指令周期。
每个指令周期Tcy的时间长度,计算方法:如果采用4MHz 的外部晶体〔fosc=4 MHz〕,那么PIC中档单片机的指令周期Tcy为1us,这是一个整数。
而采用其他频率的外部晶体时,指令周期时间将反比于外部晶体频率。
至于软件延时的构造和实现方法,其实可以采用任何指令和构造,因为只是通过执行指令消耗时间。
但通常情况下有两个选择延时程序构造的原那么:(1)执行指令周期数计算方便。
如果含有太多复杂的条件跳转循环等构造势必会造成指令周期的计算困难,甚至可能造成执行所造成的软件延时时间不等。
(2)不能占用太多的程序空间。
试想用20000个NOP指令来实现20ms的延时,显然是可以的,但是这样做浪费了整整一个页的程序存储器,得不偿失,而通过适当的循环构造,重复执行某些一样的程序是比拟合理的方法。
因此,软件延时程序一般采用以下方法:如果延时时间短〔微妙级别〕,可以连续插入几条NOP指令;如果延时时间长〔几个毫秒级别〕,那么可以使用双嵌套循环的方法来实现。
单片机软件延时程序设计

单片机软件延时程序设计在单片机的控制应用中,控制过程常有延时的需要,例如交通灯的控制程序,控制红灯亮的时间持续30秒,就可以通过延时功能来实现。
延时功能除了可以使用定时器/计数器之外,还可以使用软件程序来完成。
软件延时程序是典型的循环程序,它是通过执行一个具有固定延时时间的循环体来实现延时的。
本文从机器周期和指令周期的区别和联系、编写软件延时程序所需相关指令的用法等方面,介绍软件延时程序的设计。
一、机器周期和指令周期1.机器周期机器周期是指单片机完成一个基本操作所花费的时间,一般使用μs来计量单片机的运行速度。
MCS-51单片机的一个机器周期包括12个振荡脉冲周期,因此,一个机器周期就是振荡脉冲的十二分频。
如果MCS-51单片机的振荡脉冲频率为12MHz时,那么执行一个机器周期就只需要1μs;如果采用的是6MHz的晶振,那么执行一个机器周期就需要2μs。
2.指令周期指令周期是指单片机执行一条指令所需要的时间,一般以单片机的机器周期来计量指令周期。
MCS-51单片机的指令周期根据指令的不同,分成单周期指令(执行这条指令只需一个机器周期)、双周期指令和四周期指令。
除了乘、除两条指令是四周期指令之外,其余MCS-51单片机指令均为单周期或双周期指令。
如果MCS-51单片机采用的是12MHz 晶振,那么它执行一条指令一般只需1~2μs的时间;如果采用的是6MHz晶振,执行一条指令一般就需2~4μs的时间。
现在的单片机有很多种型号,但每个型号的单片机器件手册中都会详细说明执行各种指令所需的机器周期。
我们可以依据单片机器件手册中的指令执行周期和单片机所使用晶振频率,来完成需要用软件的方法进行的延时的程序设计。
二、延时指令在MCS-51单片机指令中并没有真正的延时指令,从以上的概念我们知道单片机每执行一条指令都需要一定的时间。
所以可以让单片机不断地执行没有具体实际意义的指令(通常把这些指令称为哑指令),就可以达到软件延时的效果。
51单片机延时函数

51单片机延时函数在嵌入式系统开发中,51单片机因其易于学习和使用、成本低廉等优点被广泛使用。
在51单片机的程序设计中,延时函数是一个常见的需求。
通过延时函数,我们可以控制程序的执行速度,实现定时器功能,或者在需要的时候进行延时操作。
本文将介绍51单片机中常见的延时函数及其实现方法。
一、使用for循环延时这种方法不精确,但是对于要求不高的场合,可以用来估算延时。
cvoid delay(unsigned int time){unsigned int i,j;for(i=0;i<time;i++)for(j=0;j<1275;j++);}这个延时函数的原理是:在第一个for循环中,我们循环了指定的时间次数(time次),然后在每一次循环中,我们又循环了1275次。
这样,整个函数的执行时间就是time乘以1275,大致上形成了一个延时效果。
但是需要注意的是,这种方法因为硬件和编译器的不同,延时时间会有很大差异,所以只适用于对延时时间要求不精确的场合。
二、使用while循环延时这种方法比使用for循环延时更精确一些,但是同样因为硬件和编译器的不同,延时时间会有差异。
cvoid delay(unsigned int time){unsigned int i;while(time--)for(i=0;i<1275;i++);}这个延时函数的原理是:我们先进入一个while循环,在这个循环中,我们循环指定的时间次数(time次)。
然后在每一次循环中,我们又循环了1275次。
这样,整个函数的执行时间就是time乘以1275,大致上形成了一个延时效果。
但是需要注意的是,这种方法因为硬件和编译器的不同,延时时间会有差异,所以只适用于对延时时间要求不精确的场合。
三、使用定时器0实现精确延时这种方法需要在单片机中开启定时器0,并设置定时器中断。
在中断服务程序中,我们进行相应的操作来实现精确的延时。
这种方法需要使用到单片机的定时器中断功能,相对复杂一些,但是可以实现精确的延时。
单片机中delay延时原理

单片机中delay延时原理延时是指在程序中暂停一段时间来等待一些操作完成或者时间间隔的过程。
在单片机中,常用的延时方法是利用循环来实现。
下面将详细介绍单片机中延时的原理。
1.循环延时循环延时是最简单的延时方法。
单片机中的时钟频率非常高,可以达到几百万或者几千万次每秒。
通过循环执行一定的指令次数,可以实现一定的延时。
每个指令的执行时间是固定的,因此通过控制循环次数可以实现准确的延时。
循环延时的原理非常简单:通过循环执行一段代码,每次循环都进行一个空操作或者简单的循环次数检测,当循环次数达到预设的值时,延时结束。
2.普通延时实现普通延时实现的代码如下:```cunsigned int i, j;for(j=0;j<1000;j++)//空操作,用于延时}}```上述代码中空操作的循环次数是根据实际情况设定的,一般通过试验来确定。
空操作的次数太小会导致延时不准确,次数太大可能会浪费过多的时间。
3.精确延时实现普通延时方法虽然简单,但是有一定的误差,影响了延时的准确性。
为了提高延时的准确性,可以通过精确延时方法来实现。
精确延时方法是使用定时器来实现延时。
利用定时器的计时功能,可以精确地控制延时的时间。
具体步骤如下:3.1设置定时器的工作模式和工作频率。
3.2根据需要延时的时间计算出定时器的初值。
3.3启动定时器。
3.4循环检测定时器的中断标志位,直到定时器计数结束。
3.5关闭定时器。
下面是一个使用定时器实现精确延时的代码示例:```cvoid delay_us(unsigned int n) //精确微秒延时TMOD=0x01;//设置定时器0为工作模式1TL0=0;//设置定时器初值TH0=0;TR0=1;//启动定时器while(n--) //循环检测定时器计时是否结束while(TF0 == 0);TF0=0;//清除定时器中断标志位}TR0=0;//关闭定时器```该代码中使用了定时器0来实现微秒级的延时。
单片机的延时与中断问题及解决方法
单片机的延时与中断问题及解决方法单片机的延时是指单片机在执行程序时,暂停一段时间,等待某个事件的发生或完成。
通常,延时常常是用于实现各种功能的操作,例如指示灯闪烁、发声器发出声音、读取传感器数据等等。
单片机的延时通常会由于外部因素产生不同的影响,因此需要根据实际需求选择合适的延时控制方式。
单片机的中断是指单片机由于外部因素或内部因素而暂停当前任务去响应其他事件的过程。
中断机制在单片机中发挥着重要的作用,它可以提高单片机的效率和准确性,同时提供实现多任务系统、异步事件处理等功能的能力。
因此,对于单片机开发人员来说,掌握中断机制的原理和应用是非常重要的。
在单片机的设计和开发过程中,延时和中断机制是必不可少的技术手段。
下面我们将详细介绍单片机的延时和中断机制,并提供一些解决方法供读者借鉴。
1、软件延时单片机的软件延时是通过控制程序执行的步骤和时间来实现的。
常用的方法有循环延时、定时器延时和误差修正延时。
(1)循环延时循环延时是利用循环语句进行延时的方法。
通常使用for循环语句,循环次数由延时的时间和单片机的主频决定。
例如,下面的代码可以实现一个大约1s的延时:for(int i=0;i<30000;i++){for(int j=0;j<100;j++);}这段代码主要是通过两个for循环语句来实现的。
外层的循环让程序执行30000次,内层的循环则是让其每循环一次暂停100微秒。
根据微秒数的定义以及单片机时钟周期的计算,可以计算出程序运行了大约1s的时间。
虽然循环延时是一种简单有效的方法,但存在延时不准确、占用CPU时间长等问题,所以只建议在简单应用场景中使用。
(2)定时器延时void timer_delay(void){T0CTL = 0x80; //打开定时器0T0CLK = 2; //选择定时器时钟源T0CNTL = 0; //定时器计数器清零while(T0CNTL<245); //循环等待计数器溢出T0CTL = 0; //关闭定时器0}在这段代码中,定时器0的中断服务程序是利用T0中断的机制实现的。
51单片机延时时间计算和延时程序设计

一、关于单片机周期的几个概念●时钟周期时钟周期也称为振荡周期,定义为时钟脉冲的倒数(可以这样来理解,时钟周期就是单片机外接晶振的倒数,例如12MHz的晶振,它的时间周期就是1/12 us),是计算机中最基本的、最小的时间单位。
在一个时钟周期内,CPU仅完成一个最基本的动作。
●机器周期完成一个基本操作所需要的时间称为机器周期。
以51为例,晶振12M,时钟周期(晶振周期)就是(1/12)μs,一个机器周期包执行一条指令所需要的时间,一般由若干个机器周期组成。
指令不同,所需的机器周期也不同。
对于一些简单的的单字节指令,在取指令周期中,指令取出到指令寄存器后,立即译码执行,不再需要其它的机器周期。
对于一些比较复杂的指令,例如转移指令、乘法指令,则需要两个或者两个以上的机器周期。
1.指令含义DJNZ:减1条件转移指令这是一组把减1与条件转移两种功能结合在一起的指令,共2条。
DJNZ Rn,rel ;Rn←(Rn)-1;若(Rn)=0,则PC←(PC)+2 ;顺序执行;若(Rn)≠0,则PC←(PC)+2+rel,转移到rel所在位置DJNZ direct,rel ;direct←(direct)-1;若(direct)= 0,则PC←(PC)+3;顺序执行;若(direct)≠0,则PC←(PC)+3+rel,转移到rel 所在位置2.DJNZ Rn,rel指令详解例:MOV R7,#5DEL:DJNZ R7,DEL; rel在本例中指标号DEL1.单层循环由上例可知,当Rn赋值为几,循环就执行几次,上例执行5次,因此本例执行的机器周期个数=1(MOV R7,#5)+2(DJNZ R7,DEL)×5=11,以12MHz的晶振为例,执行时间(延时时间)=机器周期个数×1μs=11μs,当设定立即数为0时,循环程序最多执行256次,即延时时间最多256μs。
2.双层循环1)格式:DELL:MOV R7,#bbDELL1:MOV R6,#aaDELL2:DJNZ R6,DELL2; rel在本句中指标号DELL2DJNZ R7,DELL1; rel在本句中指标号DELL1注意:循环的格式,写错很容易变成死循环,格式中的Rn和标号可随意指定。
单片机的延时与中断问题及解决方法
单片机的延时与中断问题及解决方法单片机作为嵌入式系统中非常重要的组成部分,在许多应用中都需要进行延时和中断处理。
延时和中断是单片机中常见的问题,它们直接关系到系统的稳定性和性能。
本文将重点介绍单片机中延时和中断的问题,并提出解决方法。
一、延时问题延时是指在程序执行过程中需要暂停一段时间,以便等待某些条件满足或者执行某些特定的操作。
在单片机中,延时通常需要通过软件实现,也就是在程序中加入延时函数。
常见的延时函数包括循环延时和定时器延时。
1. 循环延时循环延时是指通过循环来实现延时的方式。
具体做法是在程序中使用一个循环来反复执行空操作,从而消耗一定的时间。
下面是一个简单的循环延时函数:```cvoid delay(unsigned int ms){unsigned int i, j;for(i = 0; i < ms; i++)for(j = 0; j < 1000; j++);}```这个函数中,外层循环控制延时的毫秒数,内层循环则是用来消耗时间的。
通过这样的方式可以实现一定量级的延时。
循环延时的精度和稳定性都不够理想,特别是在频繁调用的情况下,容易导致系统性能下降。
2. 定时器延时定时器是单片机中常见的外设之一,它可以生成精确的时间延时。
通过设置定时器的时钟源和计数值,可以实现微秒级甚至更小单位的延时。
在单片机中,通常会使用定时器来实现较为精确的延时操作。
下面是一个使用定时器来实现延时的示例:```cvoid delay_us(unsigned int us){TMOD = 0x01; // 设置定时器为工作方式1TH0 = 0xFF - us / 256; // 设置定时器初值TL0 = 0xFF - us % 256; // 设置定时器初值TR0 = 1; // 启动定时器while(!TF0); // 等待定时器溢出TR0 = 0; // 停止定时器TF0 = 0; // 清除溢出标志}```这段代码中,我们使用定时器0来实现微秒级的延时操作。
单片机:51单片机的延时及时序分析

计算机工作时,是在统一的时钟脉冲控制下一拍一拍地进行的。
这个脉冲是由单片机控制器中的时序电路发出的。
单片机的时序就是CPU在执行指令时所需控制信号的时间顺序,为了保证各部件间的同步工作,单片机内部电路应在唯一的时钟信号下严格地控时序进行工作,在学习51单片机的时序之前,我们先来了解下时序相关的一些概念。
既然计算机是在统一的时钟脉冲控制下工作的,那么,它的时钟脉冲是怎么来的呢?要给我们的计算机CPU提供时序,就需要相关的硬件电路,即振荡器和时钟电路。
我们学习的8051单片机内部有一个高增益反相放大器,这个反相放大器的作用就是用于构成振荡器用的,但要形成时钟,外部还需要加一些附加电路。
8051单片机的时钟产生有以下两种方法:1. 内部时钟方式:利用单片机内部的振荡器,然后在引脚XTAL1(18脚)和XTAL2(19脚)两端接晶振,就构成了稳定的自激振荡器,其发出的脉冲直接送入内部时钟电路,外接晶振时,晶振两端的电容一般选择为30PF左右;这两个电容对频率有微调的作用,晶振的频率范围可在1.2MHz-12MHz之间选择。
为了减少寄生电容,更好地保证振荡器稳定、可靠地工作,振荡器和电容应尽可能安装得与单片机芯片靠近。
2. 外部时钟方式:此方式是利用外部振荡脉冲接入XTAL1或XTAL2。
HMOS和CHMOS单片机外时钟信号接入方式不同,HMOS型单片机(例如8051)外时钟信号由XTAL2端脚注入后直接送至内部时钟电路,输入端XTAL1应接地。
由于XTAL2端的逻辑电平不是TTL的,故建议外接一个上接电阻。
对于CHMOS型的单片机(例如80C51),因内部时钟发生器的信号取自反相器的输入端,故采用外部时钟源时,接线方式为外时钟信号接到XTAL1而XTAL2悬空。
如下图外接时钟信号通过一个二分频的触发器而成为内部时钟信号,要求高、低电平的持续时间都大于20ns,一般为频率低于12MHz的方波。
片内时钟发生器就是上述的二分频触发器,它向芯片提供了一个2节拍的时钟信号。
单片机课程实验报告-延时子程序

单片机实验报告实验报告单片机实验报告一、实验目的:学习P1口的使用方法,学习延时子程序的编写二、实验要求:以P1口作为输出口,控制6个发光二极管,模拟交通信号灯的管理。
在实验仪上选择两组红、黄、绿指示灯,代表交通信号灯。
设有一个十字路口为东西南北方向,其中东西方向为支路,南北方向为主路。
初始状态为4个路口的红灯全亮。
之后,南北路口的绿灯亮,东西路口的红灯亮。
南北路口方向通车,延时20秒后,南北路口绿灯熄灭,黄灯开始闪烁,闪烁5次后红灯亮。
而同时东西方向路口的绿灯亮,东西方向开始通车,延时10秒后,东西路口的绿灯熄灭,而黄灯开始闪烁。
闪烁5次后,在切换到南北路口的绿灯亮,东西路口的红灯亮。
之后重复上述过程。
三、实验电路:四、程序框图:五、程序清单:ORG 4000H ;定义程序存放区域的起始地址START: CLR P1.0 ;红灯亮LOOP: SETB P1.1SETB P1.2CLR P1.5SETB P1.6SETB P1.7ACALL DELAYSSETB P1.0 ;南北绿灯亮,东西红灯亮CLR P1.2ACALL DELAYL2 ;长延时20sMOV R3,#5 ;南北黄灯闪烁5次,东西红灯亮YELLOW1: ;南北黄灯亮,东西红灯亮CLR P1.1SETB P1.2ACALL DELAYS ;短延时;南北黄灯灭,东西红灯亮SETB P1.1ACALL DELAYS ;短延时DJNZ R3,YELLOW1;南北红灯亮,东西绿灯亮CLR P1.0SETB P1.5CLR P1.7ACALL DELAYL1 ;长延时10sMOV R3,#5 ;南北红灯亮,东西黄灯闪烁五次YELLOW2:CLR P1.6 ;东西黄灯亮SETB P1.7ACALL DELAYS ;短延时SETB P1.6 ;南北红灯灭,东西黄灯亮ACALL DELAYS ;短延时DJNZ R3,YELLOW2AJMP LOOP ;循环DELAYL2:MOV R4,#200 ;长延迟20sDELAY1: MOV R5,#200DELAY2: MOV R6,#250DELAY3: DJNZ R6,DELAY3DJNZ R5,DELAY2DJNZ R4,DELAY1RETDELAYS: MOV R4,#10 ;短延迟1sDELAY4: MOV R5,#200DELAY5: MOV R6,#250DELAY6: DJNZ R6,DELAY6DJNZ R5,DELAY5DJNZ R4,DELAY4RETDELAYL1:MOV R4,#100 ;长延迟10sDELAY7: MOV R5,#200DELAY8: MOV R6,#250DELAY9: DJNZ R6,DELAY9DJNZ R5,DELAY8DJNZ R4,DELAY7六、LST文件A51 MACRO ASSEMBLER LED04/21/2010 16:50:30 PAGE 1MACRO ASSEMBLER A51 V7.01OBJECT MODULE PLACED IN LED.OBJASSEMBLER INVOKED BY: C:\Keil\C51\BIN\A51.EXE LED.asm SET(SMALL) DEBUG EPLOC OBJ LINE SOURCE0000 1 ORG 0000H230000 7590DE 4 START: MOV P1,#11011110B0003 1155 5 CALL DALY1 ;0.5S0005 7590DB 6 MOV P1,#11011011B0008 1133 7 CALL DALY ;20S000A 7805 8 MOV R0,#5H000C 74DD 9 LOOP1: MOV A,#11011101B000E F590 10 MOV P1,A0010 1155 11 CALL DALY1 ;0.-5S0012 74DF 12 MOV A,#11011111B0014 F590 13 MOV P1,A0016 1155 14 CALL DALY10018 D8F2 15 DJNZ R0,LOOP1001A 747E 16 MOV A,#01111110B001C F590 17 MOV P1,A001E 1144 18 CALL DALY2 ;10S0020 7805 19 MOV R0,#5H0022 74BE 20 LOOP2: MOV A,#10111110B0024 F590 21 MOV P1,A0026 1155 22 CALL DALY10028 74FE 23 MOV A,#11111110B002A F590 24 MOV P1,A002C 1155 25 CALL DALY1002E D8F2 26 DJNZ R0,LOOP20030 020000 27 LJMP START2829 ;20S0033 7C64 30 DALY:MOV R4,#1000035 7B64 31 DELAY1:MOV R3,#1000037 7A14 32 DELAY2:MOV R2,#200039 792D 33 DELAY3:MOV R1,#45003B D9FE 34 DELAY4:DJNZ R1,DELAY4003D DAFA 35 DJNZ R2,DELAY3003F DBF6 36 DJNZ R3,DELAY20041 DCF2 37 DJNZ R4,DELAY10043 22 38 RET3940 ;10S0044 7C64 41 DALY2:MOV R4,#1000046 7B64 42 DEAY1:MOV R3,#1000048 7A0A 43 DEAY2:MOV R2,#10004A 792D 44 DEAY3:MOV R1,#45004C D9FE 45 DEAY4:DJNZ R1,DEAY4004E DAFA 46 DJNZ R2,DEAY30050 DBF6 47 DJNZ R3,DEAY20052 DCF2 48 DJNZ R4,DEAY10054 22 49 RET5051 ;0.5S0055 7C64 52 DALY1:MOV R4,#1000057 7B64 53 DEY1:MOV R3,#1000059 7A19 54 DEY2:MOV R2,#25005B DAFE 55 DEY3: DJNZ R2,DEY3005D DBFA 56 DJNZ R3,DEY2005F DCF6 57 DJNZ R4,DEY10061 22 58 RETA51 MACRO ASSEMBLER LED 04/22/2010 16:20:30 PAGE 25960 ENDA51 MACRO ASSEMBLER LED 04/21/2010 16:50:30 PAGE 3SYMBOL TABLE LISTING------ ----- -------N A M E T Y P E V A L U E ATTRIBUTESDALY . . . . . . . C ADDR 0033H ADALY1. . . . . . . C ADDR 0055H ADALY2. . . . . . . C ADDR 0044H ADEAY1. . . . . . . C ADDR 0046H ADEAY2. . . . . . . C ADDR 0048H ADEAY3. . . . . . . C ADDR 004AH ADEAY4. . . . . . . C ADDR 004CH ADELAY1 . . . . . . C ADDR 0035H ADELAY2 . . . . . . C ADDR 0037H ADELAY3 . . . . . . C ADDR 0039H ADELAY4 . . . . . . C ADDR 003BH ADEY1 . . . . . . . C ADDR 0057H ADEY2 . . . . . . . C ADDR 0059H ADEY3 . . . . . . . C ADDR 005BH ALOOP1. . . . . . . C ADDR 000CH ALOOP2. . . . . . . C ADDR 0022H AP1 . . . . . . . . D ADDR 0090H ASTART. . . . . . . C ADDR 0000H AREGISTER BANK(S) USED: 0ASSEMBLY COMPLETE. 0 WARNING(S), 0 ERROR(S) 七、实验步骤:(1)根据书中设计流程图编写源程序(见实验程序)(2)用keil软件仿真:(3)更改参数:(4)下载:1.正确连接实验仪与主机的RS-232通信电缆和电源2.把实验仪的工作模式选择开关切换到LOAD处,复位系统使实验仪工作于下载状态3.运行DPFlash下载软件4.把实验仪的工作模式选择开关切换到RUN处,复位系统使实验仪工作观察发光二极管的运行情况。
51单片机的延时及时序分析
要给我们的计算机CPU提供时序,就需要相关的硬件电路,即振荡器和时钟电路。我们学习的8051单片机内部有一个高增益反相放大器,这个反相放大器的作用就是用于构成振荡器用的,但要形成时钟,外部还需要加一些附加电路。8051单片机的时钟产生有以下两种方法:
51单片机的延时及时序分析
计算机工作时,是在统一的时钟脉冲控制下一拍一拍地进行的。这个脉冲是由单片机控制器中的时序电路发出的。单片机的时序就是CPU在执行指令时所需控制信号的时间顺序,为了保证各部件间的同步工作,单片机内部电路应在唯一的时钟信号下严格地控时序进行工作,在学习51单片机的时序之前,我们先来了解下时序相关的一些概念。
在8051单片机中把一个时钟周期定义为一个节拍(用P表示),二个节拍定义为一个状态周期(用S表示)。请大家参考后面的时序图。
机器周期
在计算机中,为了便于管理,常把一条指令的执行过程划分为若干个阶段,每一阶段完成一项工作。例如,取指令、存储器读、存储器写等,这每一项工作称为一个基本操作。完成一个基本操作所需要的时间称为机器周期。一般情况下,一个机器周期由若干个S周期(状态周期)组成。8051系列单片机的一个机器周期同6个S周期(状态周期)组成。前面已说过一个时钟周期定义为一个节拍(用P表示),二个节拍定义为一个状态周期(用S表示),8051单片机的机器周期由6个状态周期组成,也就是说一个机器周期=6个状态周期=12个时钟周期。参见后面的时序图。
二、外部时钟方式:
此方式是利用外部振荡脉冲接入XTAL1或XTAL2。HMOS和CHMOS单片机外时钟信号接入方式不同,HMOS型单片机(例如8051)外时钟信号由XTAL2端脚注入后直接送至内部时钟电路,输入端XTAL1应接地。由于XTAL2端的逻辑电平不是TTL的,故建议外接一个上接电阻。对于CHMOS型的单片机(例如80C51),因内部时钟发生器的信号取自反相器的输入端,故采用外部时钟源时,接线方式为外时钟信号接到XTAL1而XTAL2悬空。如下图
单片机实现延时方法总结
单片机实现延时方法总结实现延时通常有两种方法:一种是硬件延时,要用到定时器/计数器,这种方法可以提高CPU的工作效率,也能做到精确延时;另一种是软件延时,这种方法主要采用循环体进行。
1 、使用定时器/计数器实现精确延时单片机系统一般常选用11.059 2 MHz、12 MHz或6 MHz晶振。
第一种更容易产生各种标准的波特率,后两种的一个机器周期分别为1 μs和2 μs,便于精确延时。
本程序中假设使用频率为12 MHz的晶振。
最长的延时时间可达216=65 536 μs。
若定时器工作在方式2,则可实现极短时间的精确延时;如使用其他定时方式,则要考虑重装定时初值的时间(重装定时器初值占用2个机器周期)。
在实际应用中,定时常采用中断方式,如进行适当的循环可实现几秒甚至更长时间的延时。
使用定时器/计数器延时从程序的执行效率和稳定性两方面考虑都是最佳的方案。
但应该注意,C51编写的中断服务程序编译后会自动加上PUSH ACC、PUSH PSW、POP PSW和POP ACC语句,执行时占用了4个机器周期;如程序中还有计数值加1语句,则又会占用1个机器周期。
这些语句所消耗的时间在计算定时初值时要考虑进去,从初值中减去以达到最小误差的目的。
2 、软件延时与时间计算在很多情况下,定时器/计数器经常被用作其他用途,这时候就只能用软件方法延时。
下面介绍几种软件延时的方法。
2.1 短暂延时可以在C文件中通过使用带_NOP_( )语句的函数实现,定义一系列不同的延时函数,如Delay10us( )、Delay25us( )、Delay40us( )等存放在一个自定义的C文件中,需要时在主程序中直接调用。
如延时10 μs的延时函数可编写如下:void Delay10us( ) {_NOP_( );_NOP_( );_NOP_( );_NOP_( );_NOP_( );_NOP_( );}Delay10us( )函数中共用了6个_NOP_( )语句,每个语句执行时间为1 μs。
用单片机实现延时(自己经验及网上搜集)

标准的C语言中没有空语句。
但在单片机的C语言编程中,经常需要用几个空指令产生短延时的效果。
这在汇编语言中很容易实现,写几个nop就行了。
在keil C51中,直接调用库函数:#include<intrins.h> // 声明了void _nop_(void);_nop_(); // 产生一条NOP指令作用:对于延时很短的,要求在us级的,采用“_nop_”函数,这个函数相当汇编NOP指令,延时几微秒。
NOP指令为单周期指令,可由晶振频率算出延时时间,对于12M晶振,延时1uS。
对于延时比较长的,要求在大于10us,采用C51中的循环语句来实现。
在选择C51中循环语句时,要注意以下几个问题第一、定义的C51中循环变量,尽量采用无符号字符型变量。
第二、在FOR循环语句中,尽量采用变量减减来做循环。
第三、在do…while,while语句中,循环体内变量也采用减减方法。
这因为在C51编译器中,对不同的循环方法,采用不同的指令来完成的。
下面举例说明:unsigned char i;for(i=0;i<255;i++);unsigned char i;for(i=255;i>0;i--);其中,第二个循环语句C51编译后,就用DJNZ指令来完成,相当于如下指令:MOV 09H,#0FFHLOOP: DJNZ 09H,LOOP指令相当简洁,也很好计算精确的延时时间。
同样对do…while,while循环语句中,也是如此例:unsigned char n;n=255;do{n--}while(n);或n=255;while(n){n--};这两个循环语句经过C51编译之后,形成DJNZ来完成的方法,故其精确时间的计算也很方便。
其三:对于要求精确延时时间更长,这时就要采用循环嵌套的方法来实现,因此,循环嵌套的方法常用于达到ms级的延时。
对于循环语句同样可以采用for,do…while,while结构来完成,每个循环体内的变量仍然采用无符号字符变量。
1T单片机和12T单片机延时
1T单片机和12T单片机延时在单片机的世界里,1T 单片机和 12T 单片机是常见的类型。
而延时功能在很多单片机应用中都起着重要的作用,比如控制 LED 的闪烁频率、实现精确的定时操作等等。
今天,咱们就来好好聊聊 1T 单片机和 12T 单片机在延时方面的那些事儿。
首先,咱们得搞清楚什么是 1T 单片机和 12T 单片机。
简单来说,“T”指的是单片机执行一条指令所需要的机器周期数。
1T 单片机执行一条指令只需要 1 个机器周期,而 12T 单片机则需要 12 个机器周期。
这就好比两个人完成同一项任务,一个人动作迅速,一下子就搞定了;另一个人则相对慢一些,要花更多的时间。
那么,这种机器周期数的差异对延时会产生什么样的影响呢?咱们以一个简单的延时程序为例。
假设我们要实现一个 1 毫秒的延时,在1T 单片机中,由于它执行指令速度快,所需的指令周期数就相对较少。
而在 12T 单片机中,由于执行指令速度慢,就需要更多的指令周期来达到相同的延时效果。
比如说,我们使用软件延时的方法。
在 1T 单片机中,可能只需要几条指令就能实现 1 毫秒的延时;而在 12T 单片机中,可能需要几十条甚至上百条指令。
这就意味着,在编写延时程序时,我们需要根据单片机的类型来调整指令的数量和顺序,以达到准确的延时时间。
除了软件延时,还有硬件延时的方式。
比如使用定时器,在 1T 单片机和 12T 单片机中,定时器的设置和使用也会有所不同。
由于 1T 单片机的指令执行速度快,在设置定时器的初值和计算定时时间时,需要更加精确的计算。
而 12T 单片机则相对宽松一些。
在实际应用中,选择 1T 单片机还是 12T 单片机,很大程度上取决于具体的需求。
如果对系统的实时性要求很高,比如需要快速响应外部事件,那么 1T 单片机可能是更好的选择。
因为它能够在更短的时间内完成任务,提高系统的性能。
但是,1T 单片机也并非完美无缺。
由于其执行速度快,功耗可能会相对较高。
51单片机延时程序算法详解

51单片机汇编延时程序算法详解将以12MHZ晶振为例,详细讲解MCS-51单片机中汇编程序延时的精确算法。
指令周期、机器周期与时钟周期指令周期:CPU执行一条指令所需要的时间称为指令周期,它是以机器周期为单位的,指令不同,所需的机器周期也不同。
时钟周期:也称为振荡周期,一个时钟周期=晶振的倒数。
MCS-51单片机的一个机器周期=6个状态周期=12个时钟周期。
MCS-51单片机的指令有单字节、双字节和三字节的,它们的指令周期不尽相同,一个单周期指令包含一个机器周期,即12个时钟周期,所以一条单周期指令被执行所占时间为12*(1/12000000)=1μs。
程序分析例1 50ms 延时子程序:DEL:MOV R7,#200 ①DEL1:MOV R6,#125 ②DEL2:DJNZ R6,DEL2 ③DJNZ R7,DEL1 ④RET ⑤精确延时时间为:1+(1*200)+(2*125*200)+(2*200)+2=(2*125+3)*200+3 ⑥=50603μs≈50ms由⑥整理出公式(只限上述写法)延时时间=(2*内循环+3)*外循环+3 ⑦详解:DEL这个子程序共有五条指令,现在分别就每一条指令被执行的次数和所耗时间进行分析。
第一句:MOV R7,#200 在整个子程序中只被执行一次,且为单周期指令,所以耗时1μs 第二句:MOV R6,#125 从②看到④只要R7-1不为0,就会返回到这句,共执行了R7次,共耗时200μs第三句:DJNZ R6,DEL2 只要R6-1不为0,就反复执行此句(内循环R6次),又受外循环R7控制,所以共执行R6*R7次,因是双周期指令,所以耗时2*R6*R7μs。
例2 1秒延时子程序:DEL:MOV R7,#10 ①DEL1:MOV R6,#200 ②DEL2:MOV R5,#248 ③DJNZ R5,$ ④DJNZ R6,DEL2 ⑤DJNZ R7,DEL1 ⑥RET ⑦对每条指令进行计算得出精确延时时间为:1+(1*10)+(1*200*10)+(2*248*200*10)+(2*200*10)+(2*10)+2 =[(2*248+3)*200+3]*10+3 ⑧=998033μs≈1s由⑧整理得:延时时间=[(2*第一层循环+3)*第二层循环+3]*第三层循环+3 ⑨此式适用三层循环以内的程序,也验证了例1中式⑦(第三层循环相当于1)的成立。
单片机各种延时程序符号的含义解析

单片机各种延时程序符号的含义解析单片机延时程序MOV:这是一条指令,意思是传递数据。
说到传递,我们都很清楚,传东西要从一本人的手上传到另一本人的手上,也就是说要有一个接受者,一个传递者和一样东西。
从指令MOV R7,#250中来分析,R7是一个接受者,250是被传递的数,传递者在这条指令中被省略了(注意:并不是每一条传递指令都会省的,事实上大部份数据传递指令都会有传递者)。
它的意义也很明显:将数据250送到R7中去,因此执行完这条指令后,R7单元中的值就应当是250。
在250前面有个#号,这又是什么意思呢?这个#就是用来说明250就是一个被传递的东西本身,而不是传递者。
那么MOV R6,#250是什么意思,应当不用分析了吧。
DJNZ:这是另一条指令,我们来看一下这条指令后面跟着的两个东西,一个是R6,一个是D2,R6我们当然已知是什么了,查一下D2是什么。
D2在本行的前面,我们已学过,这称之为标号。
标号的用途是什么呢?就是给本行起一个名字。
DJNZ指令的执行过程是这样的,它将其后面的第一个参数中的值减1,然后看一下,这个值是否等于0,如果等于0,就往下执行,如果不等于0,就转移,转到什么地方去呢?可能大家已猜到了,转到第二个参数所指定的地方去(请大家用自已的话讲一下这条语句是怎样执行的)。
本条指令的最终执行结果就是,在原地转圈250次。
执行完了DJNZ R6,D2之后(也就是R6的值等于0之后),就会去执行下面一行,也就是DJNZ R7,D1,请大家自行分析一下这句话执行的结果。
(转去执行MOV R6,#250,同时R7中的值减1),最终DJNZ R6,D2这句话将被执行250*250=62500次,执行这么多次同一条指令干吗?就是为了延时。
一个问题:如果在R6中放入0,会有什么样的结果。
二、时序分析:前面我们介绍了延时程序,但这还不完善,因为,我们只知道DJNZ R6,D2这句话会被执行62500次,但是执行这么多次需要多长时间呢?是否满足我们的要求呢?我们还不知。
单片机实现延时方法总结
单片机实现延时方法总结实现延时通常有两种方法:一种是硬件延时,要用到定时器/计数器,这种方法可以提高CPU的工作效率,也能做到精确延时;另一种是软件延时,这种方法主要采用循环体进行。
1 、使用定时器/计数器实现精确延时单片机系统一般常选用11.059 2 MHz、12 MHz或6 MHz晶振。
第一种更容易产生各种标准的波特率,后两种的一个机器周期分别为1 μs和2 μs,便于精确延时。
本程序中假设使用频率为12 MHz的晶振。
最长的延时时间可达216=65 536 μs。
若定时器工作在方式2,则可实现极短时间的精确延时;如使用其他定时方式,则要考虑重装定时初值的时间(重装定时器初值占用2个机器周期)。
在实际应用中,定时常采用中断方式,如进行适当的循环可实现几秒甚至更长时间的延时。
使用定时器/计数器延时从程序的执行效率和稳定性两方面考虑都是最佳的方案。
但应该注意,C51编写的中断服务程序编译后会自动加上PUSH ACC、PUSH PSW、POP PSW和POP ACC语句,执行时占用了4个机器周期;如程序中还有计数值加1语句,则又会占用1个机器周期。
这些语句所消耗的时间在计算定时初值时要考虑进去,从初值中减去以达到最小误差的目的。
2 、软件延时与时间计算在很多情况下,定时器/计数器经常被用作其他用途,这时候就只能用软件方法延时。
下面介绍几种软件延时的方法。
2.1 短暂延时可以在C文件中通过使用带_NOP_( )语句的函数实现,定义一系列不同的延时函数,如Delay10us( )、Delay25us( )、Delay40us( )等存放在一个自定义的C文件中,需要时在主程序中直接调用。
如延时10 μs的延时函数可编写如下:void Delay10us( ) {_NOP_( );_NOP_( );_NOP_( );_NOP_( );_NOP_( );_NOP_( );}Delay10us( )函数中共用了6个_NOP_( )语句,每个语句执行时间为1 μs。
CC2530单片机精确延时函数的分析与实现
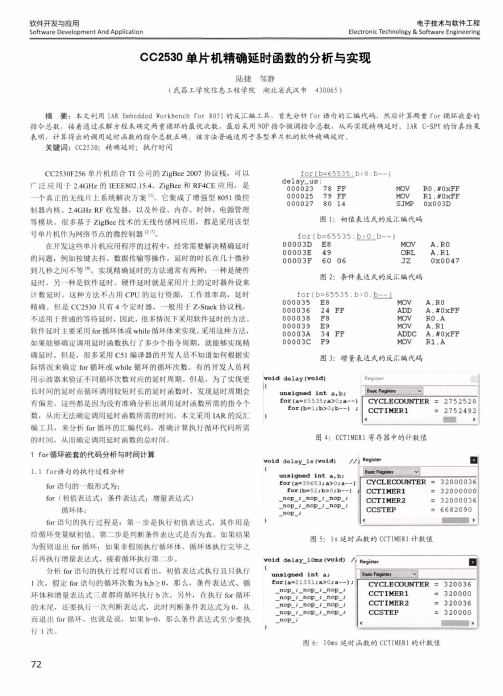
软件开发与应用 电子技术与软件工程Software Developm ent And Application Electronic Technology & Software EngineeringC C2530单片机精确延时函数的分析与实现陆捷邹静(武昌工学院信息工程学院湖北省武汉市430065 )摘要:本文利用IAR Embedded Workbench for8051的反汇编工具,首先分析f o r语句的汇编代码,然后计算两重f o r循环嵌套的 指令总数,接着通过求解方程来确定两重循环的最优次数,最后采用N0P指令微调指令总数,从而实现精确延时。
IA R C-SPY的仿真结果 表明,计算得出的调用延时函数的指令总数正确。
该方法普遍适用于各型单片机的软件精确延时。
关键词:CC2530;精确延时;执行时间CC2530F256单片机结合T I公司的ZigBee 2007协议栈,可以 广泛应用于 2.4GHz 的 IEEE802.15.4、ZigBee 和 RF4CE应用,是一个真正的无线片上系统解决方案m。
它集成了增强型8051微控 制器内核、2.4GHz R F收发器,以及外设、内存、时钟、电源管理 等模块。
很多基于ZigBee技术的无线传感网应用,都是采用该型 号单片机作为网络节点的微控制器在开发这些单片机应用程序的过程中,经常需要解决精确延时 的问题,例如按键去抖、数据传输等操作,延时的时长在几十微秒 到几秒之间不等[8]。
实现精确延时的方法通常有两种:一种是硬件 延时,另一种是软件延时。
硬件延时就是采用片上的定时器外设来 计数延时。
这种方法不占用C P U的运行资源,工作效率高,延时 精确。
但是CC2530只有4个定时器,一般用于Z-Stack协议栈,不适用于普通的等待延时,因此,很多情况下采用软件延时的方法。
软件延时主要采用for循环体或while循环体来实现。
采用这种方法,如果能够确定调用延时函数执行了多少个指令周期,就能够实现精 确延时。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上一次课中,我们已经知道,程序中的符号R7、R6是代表了一个个的RAM单元,是用来放一些数据的,下面我们再来看一下其它符号的含义。
DELAY:MOV R7,#250 ;(6)
D1:MOV R6,#250 ;(7)
D2:DJNZ R6,D2 ;(8)
DJNZ R7,D1 ;(9)
RET ;(10)
〈单片机延时程序〉
MOV:这是一条指令,意思是传递数据。
说到传递,我们都很清楚,传东西要从一本人的手上传到另一本人的手上,也就是说要有一个接受者,一个传递者和一样东西。
从指令MO V R7,#250中来分析,R7是一个接受者,250是被传递的数,传递者在这条指令中被省略了(注意:并不是每一条传递指令都会省的,事实上大部份数据传递指令都会有传递者)。
它的意义也很明显:将数据250送到R7中去,因此执行完这条指令后,R7单元中的值就应当是250。
在250前面有个#号,这又是什么意思呢?这个#就是用来说明250就是一个被传递的东西本身,而不是传递者。
那么MOV R6,#250是什么意思,应当不用分析了吧。
DJNZ:这是另一条指令,我们来看一下这条指令后面跟着的两个东西,一个是R6,一个是D2,R6我们当然已知是什么了,查一下D2是什么。
D2在本行的前面,我们已学过,这称之为标号。
标号的用途是什么呢?就是给本行起一个名字。
DJNZ指令的执行过程是这样的,它将其后面的第一个参数中的值减1,然后看一下,这个值是否等于0,如果等于0,就往下执行,如果不等于0,就转移,转到什么地方去呢?可能大家已猜到了,转到第二个参数所指定的地方去(请大家用自已的话讲一下这条语句是怎样执行的)。
本条指令的最终执行结果就是,在原地转圈250次。
执行完了DJNZ R6,D2之后(也就是R6的值等于0之后),就会去执行下面一行,也就是DJNZ R7,D1,请大家自行分析一下这句话执行的结果。
(转去执行MOV R6,#25 0,同时R7中的值减1),最终DJNZ R6,D2这句话将被执行250*250=62500次,执行这么多次同一条指令干吗?就是为了延时。
一个问题:如果在R6中放入0,会有什么样的结果。
二、时序分析:
前面我们介绍了延时程序,但这还不完善,因为,我们只知道DJNZ R6,D2这句话会被执行62500次,但是执行这么多次需要多长时间呢?是否满足我们的要求呢?我们还不知道,所以下面要来解决这个问题。
先提一个问题:我们学校里什么是最重要的。
(铃声)校长能出差,老师能休息,但学校一日无铃声必定大乱。
整个学校就是在铃声的统一指挥下,步调一致,统一协调地工作着。
这个铃是按一定的时间安排来响的,我们能称之为“时序��时间的次序”。
一个由人组成的单位尚且要有一定的时序,计算机当然更要有严格的时序。
事实上,计算机更象一个大钟,什么时候分针动,什么时候秒针动,什么时候时针动,都有严格的规定,一点也不能乱。
计算机要完成的事更复杂,所以它的时序也更复杂。
我们已知,计算机工作时,是一条一条地从ROM中取指令,然后一步一步地执行,我们规定:计算机访问一次存储器的时间,称之为一个机器周期。
这是一个时间基准,好象我们人用“秒”作为我们的时间基准一样,为什么不干脆用“秒”,多好,很习惯,学下去我们就会知道用“秒”反而不习惯。
一个机器周期包括12个时钟周期。
下面让我们算一下一个机器周期是多长时间吧。
设一个单片机工作于12M晶体震荡器,它的时钟周期是1/12(微秒)。
它的一个机器周期是12*(1/12)也就是1微秒。
(请计算一个工作于6M晶体震荡器的单片机,它的机器周期是多少)。
MCS-51单片机的所有指令中,有一些完成得比较快,只要一个机器周期就行了,有一些完成得比较慢,得要2个机器周期,还有两条指令要4个机器周期才行。
这也不难再解,不
是吗?我让你扫地的执行要完成总得比要你完成擦黑板的指令时间要长。
为了恒量指令执行时间的长短,又引入一个新的概念:指令周期。
所谓指令周期就是指执行一条指令的时间。
INTEL对每一条指令都给出了它的指令周期数,这些数据,大部份不需要我们去记忆,但是有一些指令是需要记住的,如DJNZ指令是双周期指令。
下面让我们来计算刚才的延时。
首先必须要知道晶体震荡器的频率,我们设所用晶体震荡器为12M,则一个机器周期就是1微秒。
而DJNZ指令是双周期指令,所以执行一次要2个微秒。
一共执行62500次,正好125000微秒,也就是125毫秒。
练习:设计一个延时100毫秒的延时程序。
要点分析:1、一个单元中的数是否能超过255。
2、如何分配两个数。
三、复位电路
一、复位方式
⒈复位条件
RST引脚保持2个机器周期以上的高电平。
⒉复位电路
〈单片机复位电路〉
⒊复位后CPU状态
PC:0000H TMOD:00H
Acc:00H TCON:00H
B:00H TH0:00H
PSW:00H TL0:00H
SP:07H TH1:00H
DPTR:0000H TL1:00H
P0~P3:FFH SCON:00H
IP:×××00000B SBUF:不定
IE:0××00000B PCON:0×××0000B
任何单片机在工作之前都要有个复位的过程,复位是什么意思呢?它就象是我们上课之前打的预备铃。
预备铃一响,大家就自动地从操场、其它地方进入教室了,在这一段时间里,是没有老师干预的,对单片机来说,是程序还没有开始执行,是在做准备工作。
显然,准备工作不需要太长的时间,复位只需要5ms的时间就能了。
如何进行复位呢?只要在单片机的RST管脚上加上高电平,就能了,按上面所说,时间不少于5ms。
为了达到这个要求,能用很多种办法,这里供给一种供参考,见图1。
实际上,我们在上一次实验的图中已见到过了。
这种复位电路的工作原理是:通电时,电容两端相当于是短路,于是RST管脚上为高电平,然后电源通过电阻对电容充电,RST端电压慢慢下降,降到一定程序,即为低电平,单片机开始正常工作。
如有侵权请联系告知删除,感谢你们的配合!。