路径识别代码
找出经过特定点的路径长度 c语言解法

找出经过特定点的路径长度c语言解法为了找出经过特定点的路径长度,我们需要知道一些额外的信息,例如:1.图的结构:是树、图还是其他数据结构?2.是否有权重:路径的长度是否取决于边的权重?3.特定点:是起点、终点还是中间的某个点?在这里,我假设你有一个带权重的图,并且你想找出经过特定点(可以是起点、终点或中间的某个点)的最短路径长度。
这个问题可以通过Dijkstra算法或Bellman-Ford算法来解决。
我将给出一个使用Dijkstra 算法的C语言解法。
c复制代码#include<stdio.h>#include<limits.h>#define V 9 // 假设图中有9个顶点int minDistance(int dist[], bool sptSet[]) {int min = INT_MAX, min_index;for (int v = 0; v < V; v++)if (sptSet[v] == false && dist[v] <= min)min = dist[v], min_index = v;return min_index;}void printSolution(int dist[]) {printf("Vertex \t\t Distance from Source\n");for (int i = 0; i < V; i++)printf("%d \t\t %d\n", i, dist[i]);}void dijkstra(int graph[V][V], int src) {int dist[V];bool sptSet[V];for (int i = 0; i < V; i++)dist[i] = INT_MAX, sptSet[i] = false;dist[src] = 0;for (int count = 0; count < V - 1; count++) {int u = minDistance(dist, sptSet);sptSet[u] = true;for (int v = 0; v < V; v++)if (!sptSet[v] && graph[u][v] && dist[u] != INT_MAX && dist[u] + graph[u][v] < dist[v])dist[v] = dist[u] + graph[u][v];}printSolution(dist);}int main() {int graph[V][V] = {{0, 4, 0, 0, 0, 0, 0, 8, 0},{4, 0, 8, 0, 0, 0, 0, 11, 0},{0, 8, 0, 7, 0, 4, 0, 0, 2},{0, 0, 7, 0, 9, 14, 0, 0, 0},{0, 0, 0, 9, 0, 10, 0, 0, 0},{0, 0, 4, 14, 10, 0, 2, 0, 0},{0, 0, 0, 0, 0, 2, 0, 1, 6},{8, 11, 0, 0, 0, 0, 1, 0, 7},{0, 0, 2, 0, 0, 0, 6, 7, 0}};dijkstra(graph, 0);return0;}在这个代码中,graph是一个二维数组,表示图的邻接矩阵。
python glob 递归获取路径

在Python中,glob模块提供了方便的文件模式匹配功能,可以用来获取符合特定模式的文件路径列表。
要使用glob递归地获取路径,你可以使用glob.glob()函数,并指定模式参数为**来表示递归匹配。
下面是一个示例代码,演示如何使用glob递归地获取指定目录下的所有文件路径:python复制代码import globdef get_all_files(directory, extension=None):"""递归获取指定目录下的所有文件路径。
:param directory: 要搜索的目录路径。
:param extension: 可选参数,用于指定要搜索的文件扩展名。
:return: 包含所有文件路径的列表。
"""pattern = '**'# 递归匹配模式if extension:pattern += f'*.{extension}'# 指定文件扩展名模式else:pattern += '*'# 匹配所有文件files = glob.glob(f'{directory}/{pattern}', recursive=True)return files# 示例用法directory = '/path/to/directory'# 要搜索的目录路径extension = 'txt'# 要搜索的文件扩展名(可选)files = get_all_files(directory, extension)for file in files:print(file)在上面的代码中,get_all_files()函数接受一个目录路径和一个可选的文件扩展名作为参数。
它使用glob.glob()函数和递归模式**来获取目录下的所有文件路径,如果指定了文件扩展名,则只返回匹配该扩展名的文件路径。
java 判断路径特殊字符方法

java 判断路径特殊字符方法Java 判断路径特殊字符方法1. 引言在编程中,我们经常需要判断给定的路径字符串中是否包含特殊字符。
特殊字符可能会导致程序在处理路径时出现错误,因此我们需要进行判断和处理。
本文将介绍几种常用的方法来判断路径字符串中是否包含特殊字符。
2. 使用正则表达式正则表达式是一种强大的字符匹配工具,我们可以使用它来判断路径字符串中是否包含特殊字符。
下面是一个使用正则表达式的示例代码:public boolean containsSpecialChar(String path) {String pattern = "[\\/:*?\"<>|]";return (".*" + pattern + ".*");}以上代码中,我们定义了一个包含特殊字符的正则表达式模式,并使用matches方法来判断路径字符串是否匹配该模式。
如果匹配成功,表示路径字符串中包含特殊字符,返回true;否则,返回false。
3. 使用 Java Path 类Java 的Path类提供了一些便捷的方法来处理和操作路径字符串。
我们可以使用Path类的normalize方法来删除路径中的特殊字符。
下面是一个使用Path类的示例代码:import *;public boolean containsSpecialChar(String path) {try {Path normalizedPath = (path).normalize();return !(());} catch (InvalidPathException e) {return true;}}以上代码中,我们使用(path)方法来创建一个Path对象,并调用normalize方法来规范化路径。
如果规范化后的路径字符串与原始路径字符串不相等,则表示路径中包含特殊字符,返回true;否则,返回false。
路径代码
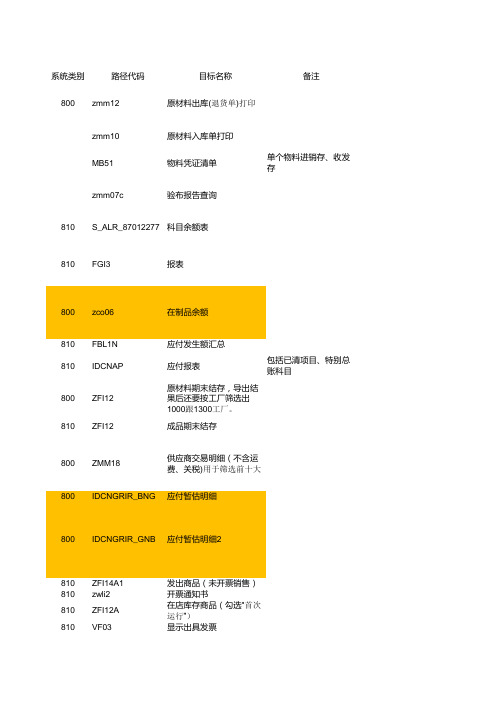
系统类别路径代码目标名称备注
800zmm12原材料出库(退货单)打印
zmm10原材料入库单打印
MB51物料凭证清单单个物料进销存、收发存
zmm07c验布报告查询
810S_ALR_87012277科目余额表
810FGI3报表
800zco06在制品余额
810FBL1N应付发生额汇总
810IDCNAP应付报表包括已清项目、特别总账科目
800ZFI12原材料期末结存,导出结果后还要按工厂筛选出1000跟1300工厂。
810ZFI12成品期末结存
800ZMM18供应商交易明细(不含运费、关税)用于筛选前十大
800IDCNGRIR_BNG应付暂估明细
800IDCNGRIR_GNB应付暂估明细2
810ZFI14A1发出商品(未开票销售)
810zwli2开票通知书
810ZFI12A在店库存商品(勾选“首次运行”)
810VF03显示出具发票
ZPP17领料单查询
810ZFI13A1发票对应销售和成本
810ZWLI2用1025-5580337进
成本
ZCO04 生产费用技术完成(制单成本)
ZCO06 在制品
ZMM24 成品外采成本明细
ZMM25 制单入库成本明细
ZMM22 材料外采成本明细
ZMM18 全年采购明细(不含运费,关税)
ZQR01 材料减少明细(获取变式->删除凭证类型->)
ZFI10A进销存销售(成品)
FK10N 供应商交易额
S_ALR_87012079 勾选对象清单应付预付发生额
生产成本发生额:显示余额-5001*TO6601*,排除0200/0300/0400。
python获取路径

python获取路径简介:Python是一种处理文件路径的强大的脚本语言,它可以通过内置的os模块来识别、处理和获取文件路径。
这篇文章就来简要介绍Python获取路径的几种方法。
一、os模块中的路径函数在Python中,我们可以通过os模块中的几个函数来获取路径: 1.getcwd()函数:该函数用于获取当前工作目录(即当前Python 脚本运行所在的路径)。
2.getenv()函数:该函数用于获取系统环境变量指定的路径。
3.abspath()函数:该函数用于获取指定文件的绝对路径。
4.realpath()函数:该函数用于获取对应可执行文件所指定的完整路径。
5.path.expanduser()函数:该函数用于获取当前用户的家目录的路径。
6.path.join()函数:该函数用于将目录和文件名合并为一个完整的路径。
二、os.path模块中的路径函数os.path模块是os模块的子模块,它提供了一些与文件路径操作相关的函数,这些函数可以帮助我们快速获取文件路径。
这里介绍几个常用的函数:1.os.path.exists(path)函数:该函数用于检查给定的路径是否存在。
2.os.path.isabs(path)函数:该函数用于检查一个路径是否绝对路径。
3.os.path.isfile(path)函数:该函数用于检查一个路径是否是一个文件。
4.os.path.isdir(path)函数:该函数用于检查一个路径是否是一个文件夹。
5.os.path.basename(path)函数:该函数用于获取文件名。
6.os.path.dirname(path)函数:该函数用于获取文件所在的目录。
7.os.path.split(path)函数:该函数用于分割路径,将文件名和文件路径分离。
8.os.path.splitext(path)函数:该函数用于获取文件的扩展名。
三、pathlib模块的基本用法pathlib模块是一个对路径处理更加友好的模块,它可以让我们更加方便、快捷的处理文件路径,下面介绍它的几个常用用法:1.pathlib.Path.cwd()函数:该函数用于获取当前工作目录(即当前Python脚本运行所在的路径)。
C#路径的八种相关操作

使用bine方法,它会帮你处理烦人的“\”。
5、获得系统目录的路径
Environment.SystemDirectory属性:获取系统目录的完全限定路径
Environment.GetFolderPath方法:该方法接受的参数类型为Environment.SpecialFolder枚举,通过这个方法可以获得大量系统文件夹的路径,如我的电脑,桌面,系统目录等
9、文件夹浏览对话框(FolderBrowserDialog类)
主要属性:Description:树视图控件上显示的说明文本,如上图中的“选择目录--练习”;RootFolder:获取或设置从其开始浏览的根文件夹,如上图中设置的我的电脑(默认为桌面);SelectedPath:获取或设置用户选定的路径,如果设置了该属性,打开对话框时会定位到指定路径,默认为根文件夹,关闭对话框时根据该属性获取用户用户选定的路径;ShowNewFolderButton:获取或设置是否显示新建对话框按钮;
Path.GetExtension:返回指定的路径字符串的扩展名。
Path.GetFileName:返回指定路径字符串的文件名和扩展名。
Path.GetFileNameWithoutExtension:返回不具有扩展名的路径字符串的文件名。
Path.GetPathRoot:获取指定路径的根目录信息。
1、判定一个给定的C#路径是否有效,合法
通过Path.GetInvalidPathChars或Path.GetInvalidFileNameChars方法获得非法的C#路径/文件名字符,可以根据它来判断路径中是否包含非法字符;
2、如何确定一个C#路径字符串是表示目录还是文件
路径搜索–Dijkstra算法(MATLAB实现)

路径搜索–Dijkstra算法(MATLAB实现)因为在上⼀门算法课(),看了⽼师的视频也不明⽩,⼜接着百度了⼀些关于这个算法的说明,各种⼤神写得很⾼深,很多专业术语,超出了我的认知⽔平,我看了很久也看不懂。
最后总算明⽩了⼀些些,于是,⽤⼤⽩话把它记录⼀下,免得下次⼜忘记了。
要真要⽤这些搜索算法的话,还不如直接调⽤命令算了:路径搜索问题:路径搜索问题,就类似于下图中,机器⼈要从绿⾊起点⾛到黄⾊终点,沿什么样路线过去?这是我们从视觉上来理解这个问题,可以沿着红线⾛过去。
先不说怎么让机器⼈⾃⼰能能找到这条线,先来说怎么把诸如“地图”、"线路"、"位置"、“障碍物”等等概念表⽰成代码呢?地图说算法之前,看看这个地图怎么表⽰。
⾸先,把地图划分为⽹格,这样就可以跟矩阵对应起来了。
矩阵的⾏、列就直观的表⽰地图上的每⼀个位置坐标。
下⾯的 ones 命令就⽣成了⼀个 10*10 的全 1 阵 map,表⽰⼀张 10*10 的地图。
那数字 1 表⽰什么呢?⽬前为⽌,什么也不表⽰,没有任何意义。
rows = 10;ncols = 10;map = ones(rows, ncols);地图的其它信息,⽐如起点,终点,障碍物等等,怎么在这个地图上表⽰出来呢?那就给 map 矩阵赋不同的值呗,⽐如我们约定好:空地⽤ 1 表⽰,墙⽤ 2 表⽰。
我们约定好以后,矩阵的值就变得有意义了。
将来判断 map(2,2)~=2,我们就知道(2,2)这个位置是不是有墙。
( 考虑到浮点数判断的精度问题,将来地图的数据类型可以设置为整型,之类。
)map (1:5, 7) = 2; % 设置⼀堵墙map(6, 2) = 5; % 设置起点map(4, 8) = 6; % 设置终点但 map 其实还只是⼀堆数字,不直观。
所以我们希望能把这个 map 给“画”出来。
⽐如,我希望空地的1对应画⽩⾊;⽽墙的2对应画⿊⾊:% R G Bcmap = [111; ...% 1 - white - clear cell000; ...% 2 - black - obstacle100; ...% 3 - red = visited001; ...% 4 - blue - on list010; ...% 5 - green - start110];% 6 - yellow – destinationcolormap(cmap);这样设置之后,map 矩阵由于是 double 类型的,所以它的值为1-6时,画什么颜⾊就按照这⾥配置的颜⾊映射来定。
getopenfilename 获取路径

getopenfilename 获取路径标题:深入了解getOpenFileName函数:获取文件路径的强大工具导语:在计算机编程领域,getOpenFileName函数是一种常用的工具,用于获取文件路径。
它被广泛应用于各种应用程序中,为用户提供了快捷、简单的文件选择功能。
本文将深入探讨getOpenFileName函数的应用及其优势,以及如何充分利用该函数获取路径信息。
正文:一、简介getOpenFileName函数是Qt框架中的一个文件对话框函数,用于在用户选择文件时显示一个对话框窗口,并返回所选文件的路径。
它是跨平台的,并且提供了丰富的参数选项,使得开发人员可以根据应用程序的需求灵活使用。
二、函数参数getOpenFileName函数包含了多个可选参数,这些参数帮助开发人员定制文件选择对话框的外观和功能。
其中一些常见的参数有:1. parent:对话框的父级窗口,通常是调用该函数的窗口对象。
2. caption:对话框的标题栏文本,用于描述对话框的用途。
3. directory:对话框打开时默认显示的目录。
4. filter:过滤器,用于限制用户选择的文件类型。
5. options:其他选项,如隐藏文件、多选等。
三、使用示例下面是一个简单的示例代码,演示了如何使用getOpenFileName函数获取文件路径:```cpp#include <QFileDialog>#include <QString>QString filePath = QFileDialog::getOpenFileName(this, "选择文件", "C:/", "文本文件 (*.txt)");// 参数依次为父级窗口,标题,初始目录,过滤器```四、优势和应用场景getOpenFileName函数具有以下优势和应用场景:1. 简单易用:函数调用简单明了,即使对于初学者也能快速上手。
代码路径相似度计算

代码路径相似度计算
代码路径相似度计算可以通过比较两个代码路径的相似程度来衡量它们之间的相似度。
下面介绍几种常用的代码路径相似度计算方法:1. 编辑距离(Edit Distance):编辑距离是衡量两个字符串之间的相似度的一种方法。
可以把代码路径看作是一个字符串,然后使用编辑距离算法计算两个代码路径之间的距离。
编辑距离越小,表示两个代码路径越相似。
2. Levenshtein 距离:Levenshtein 距离是编辑距离的一种变体,它考虑了三种操作:插入、删除和替换。
可以将两个代码路径看作是两个字符串,然后使用 Levenshtein 距离算法计算它们之间的距离。
Levenshtein 距离越小,表示两个代码路径越相似。
3. Jaccard 系数:Jaccard 系数是一种用于衡量两个集合之间相似度的方法。
将代码路径看作是一个集合,集合中的元素表示路径中经过的代码块。
然后使用 Jaccard 系数算法计算两个代码路径之间的相似度。
Jaccard 系数越大,表示两个代码路径越相似。
4. Cosine 相似度:Cosine 相似度是一种常用的用于衡量两个向量之间相似度的方法。
可以将代码路径看作是一个向量,向量的每个维度表示路径中经过的代码块的出现次数。
然后使用 Cosine 相似度算法计算两个代码路径之间的相似度。
Cosine 相似度越大,表示两个代码路径越相似。
以上是几种常用的代码路径相似度计算方法,具体选择哪种方法可以根据实际需求和数据特点进行选择。
一些常用到的文件路径相关的API

Path API需要头文件:shlwapi.h其中有一些函数功能存在重复,我在认为比较常用的的函数上加红。
BOOL PathFileExists(LPCTSTR lpszPath)功能:检查文件/路径是否存在LPTSTR PathFindFileName(LPCTSTR pPath)功能:获得路径中的文件名例如:PathFileFileName( “c:\\Program Files\\File.txt” ) =“File.txt”。
如果路径中不包含文件名,则返回值是最下面的目录名。
LPTSTR PathFindExtension(LPCTSTR pPath)功能:获取路径或文件名中的文件扩展名例如:PathFindExtension( “File.txt” ) = “.txt”LPTSTR PathFindNextComponent(LPCTSTR pszPath)例如:PathFindNextComponent( “c:\\Program Files\\Directory” ) = “Program Files\\Directory”PathFindNextCom ponent( “c:\\Program Files” ) = “Program Files”BOOL PathFindOnPath( IN OUT LPTSTR pszFile , IN LPCTSTR * ppszOtherDirs) 功能:在指定的目录中寻找文件。
参数:pszFile 要寻找的文件名,确保 pszFile 有足够的大小来容纳 MAX_PATH 个字符。
如果能找到指定的文件,该参数将返回文件的全路径。
ppszOtherDirs该参数是首先要寻找的目录列表,它可以为NULL,如果为NULL,函数将在系统目录,当前目录和由PATH设定的目录中查找。
LPTSTR PathGetArgs(LPCTSTR pszPath)功能:从路径中分析参数例如:LPTSTR pszParam = PathGetArgs( “notepad.exe c:\\temp.txt” ) pszParam 返回“c:\\temp.txt”int PathGetDriveNumber(LPCTSTR lpsz)功能:从路径中分析盘符返回值:成功返回 0 –25 ,代表(A – Z),失败返回–1BOOL PathIsContentType(LPCTSTR pszPath,LPCTSTR pszContentType)功能:检查文件是否为指定的ContentType例如:PathIsContentType( “hello.txt” , “text/plain” ) 返回TRUEPathIsContentType( “hello.txt” , “image/gif” ) 返回FALSEBOOL PathIsDirectory(LPCTSTR pszPath)功能:检查路径是否为有效目录。
java中路径表示方法

Java中路径表示方法一、概述路径在编程中是一个非常重要的概念,尤其在Java中更是如此。
Java是一种面向对象的编程语言,广泛应用于各种应用程序的开发。
在Java中,我们经常需要操作文件和目录,因此,对于路径的表示方法有着严格的要求。
二、绝对路径和相对路径路径可以分为两种形式:绝对路径和相对路径。
绝对路径指的是从根目录开始的路径表示方法,而相对路径则是相对于当前目录的路径表示方法。
2.1 绝对路径的表示方法在Java中,绝对路径可以使用以下两种方式进行表示:1.使用绝对路径的完整字符串表示法。
例如,Windows系统中的绝对路径可能是”C:.java”,而Linux系统中则是”/home/user/myproject/src/Main.java”。
2.使用Java中提供的File类的方法来表示绝对路径。
例如,可以使用file.getAbsolutePath()方法来获取当前文件的绝对路径。
2.2 相对路径的表示方法相对路径是相对于当前文件所在的目录来表示的。
在Java中,相对路径可以使用以下方式进行表示:1.相对于当前目录的路径表示方法。
例如,如果当前目录是”/home/user/myproject/src/“,那么相对于该目录的文件”/home/user/myproject/src/Main.java”可以简化为”Main.java”。
2.使用”..\..”表示回到上两级目录。
Java中提供了File类来对路径进行操作。
File类是Java中操作文件和目录的核心类,提供了一系列方法来获取、创建、删除文件和目录,以及进行文件和目录的重命名等操作。
3.1 创建File对象我们可以使用以下几种方式来创建File对象:1.使用路径字符串创建File对象。
例如,可以使用File file = newFile("C:\\myproject\\src\\Main.java");来创建File对象。
纯路径追踪算法 c代码

纯路径追踪算法是一种高级的光线追踪算法,它能够模拟出更加真实的光线传播效果。
本文将介绍纯路径追踪算法的基本原理,并给出一份使用C语言实现的代码。
一、算法原理纯路径追踪算法是一种基于蒙特卡罗方法的光线追踪算法,它的基本思路是通过随机采样来模拟光线的传播过程。
具体来说,纯路径追踪算法的主要步骤如下:1. 从相机位置发射一条光线,记录其与场景中物体的相交点;2. 对于每个相交点,根据材质的反射和折射特性,随机生成一定数量的新光线;3. 对于每条新光线,递归执行步骤1和2,直到达到最大递归深度或者光线没有与任何物体相交为止;4. 对于每个相交点,根据采样的光线计算出其对应的颜色值,最终将所有颜色值相加得到最终像素颜色。
通过上述步骤,纯路径追踪算法能够模拟出真实的光线传播效果,包括反射、折射、漫反射、镜面反射等。
二、C语言代码实现下面是一份使用C语言实现的纯路径追踪算法代码:```c#include#include#include#define MAX_DEPTH 5 // 最大递归深度#define EPSILON 0.0001 // 微小值typedef struct {double x, y, z;} Vector3;typedef struct {Vector3 position;Vector3 normal;double distance;} Intersection;typedef struct {double r, g, b;} Color;typedef struct {Vector3 position;double radius;Color color;} Sphere;typedef struct {int width, height;double fov;Vector3 position;Vector3 forward;Vector3 right;Vector3 up;} Camera;typedef struct {int num_spheres;Sphere *spheres;} Scene;double dot(Vector3 a, Vector3 b) { return a.x * b.x + a.y * b.y + a.z * b.z; }Vector3 add(Vector3 a, Vector3 b) { Vector3 c;c.x = a.x + b.x;c.y = a.y + b.y;c.z = a.z + b.z;return c;}Vector3 subtract(Vector3 a, Vector3 b) {Vector3 c;c.x = a.x - b.x;c.y = a.y - b.y;c.z = a.z - b.z;return c;}Vector3 multiply(Vector3 a, double b) {Vector3 c;c.x = a.x * b;c.y = a.y * b;c.z = a.z * b;return c;}Vector3 normalize(Vector3 a) {double length = sqrt(a.x * a.x + a.y * a.y + a.z * a.z);Vector3 b;b.x = a.x / length;b.y = a.y / length;b.z = a.z / length;return b;}Intersection intersect_sphere(Vector3 ray_origin, Vector3 ray_direction, Sphere sphere) { Intersection intersection;intersection.distance = INFINITY;Vector3 oc = subtract(ray_origin, sphere.position);double a = dot(ray_direction, ray_direction);double b = 2 * dot(oc, ray_direction);double c = dot(oc, oc) - sphere.radius * sphere.radius;double discriminant = b * b - 4 * a * c;if (discriminant > 0) {double t1 = (-b + sqrt(discriminant)) / (2 * a);double t2 = (-b - sqrt(discriminant)) / (2 * a);double t = fmin(t1, t2);if (t > EPSILON) {intersection.distance = t;intersection.position = add(ray_origin, multiply(ray_direction, t)); intersection.normal = normalize(subtract(intersection.position, sphere.position));}}return intersection;}Intersection intersect_scene(Vector3 ray_origin, Vector3 ray_direction, Scene scene) { Intersection closest_intersection;closest_intersection.distance = INFINITY;for (int i = 0; i < scene.num_spheres; i++) {Sphere sphere = scene.spheres[i];Intersection intersection = intersect_sphere(ray_origin, ray_direction, sphere);if (intersection.distance < closest_intersection.distance) {closest_intersection = intersection;}}return closest_intersection;}Color trace_ray(Vector3 ray_origin, Vector3 ray_direction, Scene scene, int depth) {Color color = {0, 0, 0};if (depth > MAX_DEPTH) {return color;}Intersection intersection = intersect_scene(ray_origin, ray_direction, scene);if (intersection.distance == INFINITY) {return color;}Vector3 reflection_direction = subtract(ray_direction, multiply(intersection.normal, 2 *dot(ray_direction, intersection.normal)));Color reflection_color = trace_ray(intersection.position, reflection_direction, scene, depth + 1);color.r += reflection_color.r * 0.5;color.g += reflection_color.g * 0.5;color.b += reflection_color.b * 0.5;return color;}void render_scene(Camera camera, Scene scene, Color *image) {for (int y = 0; y < camera.height; y++) {for (int x = 0; x < camera.width; x++) {double u = (2 * (x + 0.5) / (double)camera.width - 1) * tan(camera.fov / 2);double v = (1 - 2 * (y + 0.5) / (double)camera.height) * tan(camera.fov / 2) * camera.height / (double)camera.width;Vector3 ray_direction = normalize(add(add(multiply(camera.forward, 1), multiply(camera.right, u)), multiply(camera.up, v)));Color color = trace_ray(camera.position, ray_direction, scene, 0);image[y * camera.width + x] = color;}}}int main() {Camera camera = {.width = 640,.height = 480,.fov = M_PI / 3,.position = {0, 0, 0},.forward = {0, 0, 1},.right = {1, 0, 0},.up = {0, 1, 0}};Sphere sphere1 = {.position = {0, 0, 5},.radius = 1,.color = {1, 1, 1}};Sphere sphere2 = {.position = {2, 0, 5},.radius = 1,.color = {1, 0, 0}};Sphere sphere3 = {.position = {-2, 0, 5},.radius = 1,.color = {0, 1, 0}};Scene scene = {.num_spheres = 3,.spheres = (Sphere[]){sphere1, sphere2, sphere3} };Color *image = malloc(camera.width * camera.height * sizeof(Color));render_scene(camera, scene, image);FILE *fp = fopen("output.ppm", "wb");fprintf(fp, "P6\n%d %d\n255\n", camera.width, camera.height);for (int i = 0; i < camera.width * camera.height; i++) {fputc((int)(255 * fmin(image[i].r, 1)), fp);fputc((int)(255 * fmin(image[i].g, 1)), fp);fputc((int)(255 * fmin(image[i].b, 1)), fp);}fclose(fp);free(image);return 0;}```三、代码解释上述代码中,我们定义了一些基本数据类型,包括三维向量(Vector3)、相交点(Interse ction)、颜色(Color)、球体(Sphere)和相机(Camera)。
python正则匹配路径

python正则匹配路径在Python中,我们可以使用正则表达式来匹配路径。
路径通常包括文件系统中的目录和文件名,可以是绝对路径或相对路径。
下面是一个简单的示例,演示如何使用正则表达式来匹配路径:python.import re.path = "/home/user/documents/file.txt"pattern = r"^(./)?(?:$|(.+?)(?:(\.[^.]$)|$))"match = re.match(pattern, path)。
if match:print("完整路径:", match.group(0))。
print("目录:", match.group(1))。
print("文件名:", match.group(2))。
print("扩展名:", match.group(3))。
else:print("路径不匹配")。
在这个示例中,我们使用了`re.match()`函数来尝试匹配路径。
正则表达式`^(./)?(?:$|(.+?)(?:(\.[^.]$)|$))`用于匹配路径中的目录、文件名和扩展名。
`^(./)?` 匹配可选的目录部分,包括斜杠。
`(?:$|(.+?)(?:(\.[^.]$)|$))` 匹配文件名和扩展名部分。
这里使用了非捕获组 `(?:)` 来表示不捕获该组的内容。
当我们运行这段代码时,如果路径匹配成功,将会打印出完整路径、目录、文件名和扩展名。
否则,将会打印出"路径不匹配"。
需要注意的是,上面的示例只是一个简单的匹配路径的例子。
实际情况中,根据具体需求,可能需要更复杂的正则表达式来匹配不同类型的路径。
同时,对于文件路径的处理,还需要考虑操作系统的不同,比如在Windows和Linux下的路径表示方式可能不同。
路径decord编码处理

路径decord编码处理
路径解码(URL decoding)是指将经过编码的 URL 或者路径进行解码,使其恢复成原始的形式。
在网络编程中,经常会遇到需要对 URL 进行编码和解码的情况,以便于传输和处理特殊字符或者非ASCII 字符。
在Python中,我们可以使用urllib.parse.unquote函数对路径进行解码处理。
例如:
python.
import urllib.parse.
encoded_path = '/my%20folder/my%2Bfile.txt'。
decoded_path = urllib.parse.unquote(encoded_path)。
print(decoded_path)。
以上代码将会输出`/my folder/my+file.txt`,这里`%20`会被
解码成空格,`%2B`会被解码成加号。
在Web开发中,路径解码常用于处理用户输入的URL或者处理
从其他系统获取的URL,以确保其中的特殊字符被正确解释和处理。
这样可以避免出现乱码或者错误的处理结果。
需要注意的是,路径解码只能用于解码经过编码的路径,如果
对未经过编码的路径进行解码,可能会导致意外的结果。
因此,在
进行路径解码处理时,需要确保被解码的路径确实是经过编码的。
综上所述,路径解码处理是对经过编码的 URL 路径进行解码,
以便恢复成原始的形式,可以通过Python中的
urllib.parse.unquote函数来实现,但在使用时需要注意确保被解
码的路径确实是经过编码的。
qregexp window路径 正则表达式

qregexp window路径正则表达式正则表达式是一个强大的工具,用于在计算机科学和文本处理中匹配、搜索和替换文本。
一个典型的应用场景是在处理文件路径时使用正则表达式来提取特定的目录信息。
在本文中,我将详细介绍如何使用正则表达式来匹配window路径,并提取其中的内容。
第一步,我们需要了解window路径的结构。
在Windows文件系统中,路径由驱动器名、路径名和文件名组成。
驱动器名一般以一个大写字母开头,后跟一个冒号。
路径名由零个或多个文件夹名组成,每个文件夹名之间使用反斜杠(\)分隔。
文件名由文件名和文件后缀名组成,两者之间使用句点(.)分隔。
示例路径:C:\Folder1\Folder2\file.txt第二步,我们将使用正则表达式来匹配这样的路径。
在正则表达式中,反斜杠(\)是一个特殊字符,用于转义其他特殊字符。
因此,要匹配一个反斜杠,我们需要使用两个反斜杠(\\)。
以下是匹配window路径的正则表达式:^([A-Z]):\\(?:[^\\/:*?"<> \r\n]+\\)*[^\\/:*?"<> \r\n]*让我们逐步解释这个正则表达式:^ 表示匹配字符串的开头。
([A-Z]) 表示匹配一个大写字母并将其捕获。
: 匹配一个冒号。
\\ 匹配一个反斜杠。
(?:[^\\/:*?"<> \r\n]+\\)* 表示匹配零个或多个文件夹名。
(?:...) 是一个非捕获组,用于分组一个子表达式,但不捕获该子表达式的匹配结果。
[^...] 表示匹配除了指定字符之外的任意字符。
+ 表示匹配一个或多个。
[^\\/:*?"<> \r\n]* 表示匹配文件名和文件后缀名。
* 表示匹配零个或多个。
表示匹配字符串的结尾。
第三步,让我们来看一个示例,使用上述正则表达式来匹配并提取window 路径中的不同部分。
import repath = "C:\\Folder1\\Folder2\\file.txt"pattern = r'^([A-Z]):\\(?:[^\\/:*?"<> \r\n]+\\)*([^\\/:*?"<> \r\n]*)'result = re.match(pattern, path)if result:drive = result.group(1)folders = result.group(2)print("驱动器名:", drive)print("文件夹路径:", folders)else:print("路径不匹配")运行以上代码,输出结果如下:驱动器名:C文件夹路径:Folder1\Folder2在以上示例中,我们使用re.match()方法来尝试匹配正则表达式。
java 正则表达式 匹配路径 说明

java 正则表达式匹配路径说明Java正则表达式是一种强大的字符串匹配工具,可以用来匹配各种复杂的文本模式。
在Java中,我们可以使用正则表达式来匹配路径。
本文将介绍如何使用Java正则表达式来匹配路径。
首先,路径通常由多个部分组成,每个部分之间用某种分隔符分隔。
在Unix/Linux系统中,路径使用正斜杠(/)作为分隔符,在Windows系统中,路径使用反斜杠()作为分隔符。
因此,我们需要使用正则表达式来匹配这些路径分隔符。
在Java中,可以使用反斜杠来转义正斜杠和反斜杠,例如:'/'可以表示为'/',''可以表示为''。
以下是一些示例正则表达式:1. 匹配Unix/Linux路径:'/.*/.*'这个正则表达式可以匹配任何以正斜杠开始,然后跟随任何数量的任意字符,最后以正斜杠结束的路径。
2. 匹配Windows路径:'.*.*'这个正则表达式可以匹配任何以反斜杠开始,然后跟随任何数量的任意字符,最后以反斜杠结束的路径。
3. 匹配Unix/Linux或Windows路径:'(|/).*(|/)'.这个正则表达式可以匹配任何以正斜杠或反斜杠开始,然后跟随任何数量的任意字符,最后以正斜杠或反斜杠结束的路径。
除了匹配路径分隔符,我们还可以使用正则表达式来匹配具体的路径名或文件名。
例如,我们可以使用以下正则表达式来匹配以'.java'结尾的文件名:'^.*.java$'以上就是关于Java正则表达式匹配路径的说明。
通过使用正则表达式,我们可以灵活地匹配各种不同的路径格式,使我们的程序更加强大和通用。
python 文件路径参数
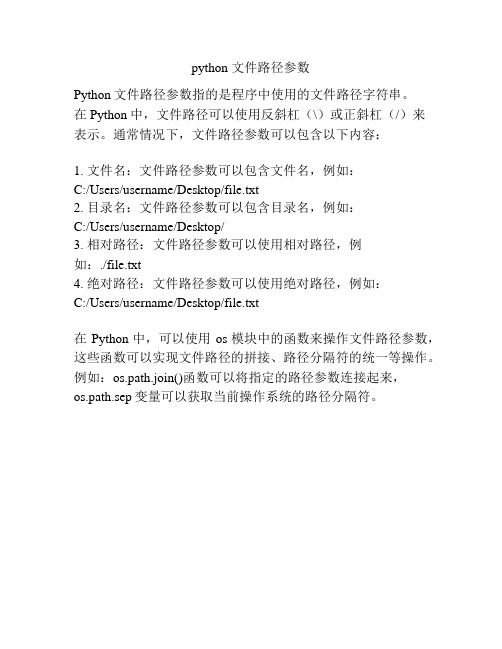
python 文件路径参数
Python文件路径参数指的是程序中使用的文件路径字符串。
在Python中,文件路径可以使用反斜杠(\)或正斜杠(/)来
表示。
通常情况下,文件路径参数可以包含以下内容:
1. 文件名:文件路径参数可以包含文件名,例如:
C:/Users/username/Desktop/file.txt
2. 目录名:文件路径参数可以包含目录名,例如:
C:/Users/username/Desktop/
3. 相对路径:文件路径参数可以使用相对路径,例
如:./file.txt
4. 绝对路径:文件路径参数可以使用绝对路径,例如:
C:/Users/username/Desktop/file.txt
在Python中,可以使用os模块中的函数来操作文件路径参数,这些函数可以实现文件路径的拼接、路径分隔符的统一等操作。
例如:os.path.join()函数可以将指定的路径参数连接起来,
os.path.sep变量可以获取当前操作系统的路径分隔符。
agv小车路径设计代码em

agv小车路径设计代码emAGV小车路径设计代码可以使用不同的算法实现,以下是其中一种基于最短路径算法的代码示例(使用Python语言):```pythonimport heapq # 用于实现优先队列class Graph:# 图的构造函数def __init__(self):self.vertices = set() # 存储节点集合self.edges = {} # 存储邻接表# 添加节点def add_vertex(self, value):self.vertices.add(value)self.edges[value] = []# 添加边def add_edge(self, v1, v2, weight):# 无向图需要添加两条边self.edges[v1].append((v2, weight))self.edges[v2].append((v1, weight))# 最短路径算法def dijkstra(self, start, end):# 优先队列,存储节点和到起点的距离pq = [(0, start)]# 存储已访问的节点visited = set()# 存储到起点的距离distances = {start: 0}# 存储路径previous = {}# 当队列为空或终点已访问,停止搜索while len(pq) > 0 and end not in visited:# 取出队列中距离最小的节点(distance, current) = heapq.heappop(pq)# 标记当前节点已访问visited.add(current)# 遍历当前节点的所有邻居for (neighbor, weight) in self.edges[current]:# 计算到邻居的距离distance_to_neighbor = distance + weight# 如果距离更短,则更新距离和路径if neighbor not in distances or distance_to_neighbor < distances[neighbor]: distances[neighbor] = distance_to_neighborprevious[neighbor] = current# 加入优先队列heapq.heappush(pq, (distance_to_neighbor, neighbor))# 如果没有到达终点,则路径不存在if end not in previous:return None# 从终点回溯到起点,得到路径path = [end]current = endwhile current != start:current = previous[current]path.append(current)path.reverse()# 返回路径和距离return path, distances[end]# 测试代码graph = Graph()graph.add_vertex(1)graph.add_vertex(2)graph.add_vertex(3)graph.add_vertex(4)graph.add_vertex(5)graph.add_vertex(6)graph.add_edge(1, 2, 7)graph.add_edge(1, 3, 9)graph.add_edge(1, 6, 14)graph.add_edge(2, 3, 10)graph.add_edge(2, 4, 15)graph.add_edge(3, 4, 11)graph.add_edge(3, 6, 2)graph.add_edge(4, 5, 6)graph.add_edge(5, 6, 9)path, distance = graph.dijkstra(1, 5)print(path) # [1, 3, 4, 5]print(distance) # 20```在实际使用中,你需要根据AGV小车所在的环境和需求来构造图,然后调用`dijkstra`方法得到最短路径。
easyocr模型路径

easyocr模型路径EasyOCR是一个开源的OCR工具包,可以用于识别多语言的文字。
在使用EasyOCR之前,我们需要先下载并安装EasyOCR模型。
本文将介绍EasyOCR模型路径的相关内容。
EasyOCR模型路径指的是存放EasyOCR模型文件的目录或路径。
在使用EasyOCR进行文字识别时,需要指定模型的路径,以便加载模型并进行文字识别。
我们需要下载EasyOCR模型文件。
可以在EasyOCR的官方仓库或者其他可靠的资源站点上找到模型文件的下载链接。
下载完成后,我们可以将模型文件保存到本地的某个目录中,这个目录就是模型的路径。
在使用EasyOCR时,我们可以通过设置模型路径的方式告诉EasyOCR模型文件的位置。
例如,可以使用以下代码将模型路径设置为"/path/to/model":```import easyocrreader = easyocr.Reader(['ch_sim', 'en'], model_path='/path/to/model')result = reader.readtext('image.jpg')```在上述代码中,`model_path`参数指定了模型的路径,将其设置为实际的模型路径即可。
然后,我们可以使用`reader`对象的`readtext`方法对指定的图像进行文字识别。
需要注意的是,模型路径应该是一个有效的路径,并且模型文件应该存在于该路径中。
如果模型文件不存在或路径不正确,将会导致加载模型失败。
EasyOCR还提供了默认的模型路径,即模型文件与EasyOCR库文件放在同一个目录下。
在这种情况下,我们可以不指定模型路径,EasyOCR会自动加载默认路径下的模型。
EasyOCR模型路径是指存放EasyOCR模型文件的目录或路径。
在使用EasyOCR进行文字识别时,我们需要指定模型路径,以便加载模型并进行文字识别。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
路径识别代码
识别是用来设定速度的。
简单的识别还是容易,贴个代码。
其中gap值为极左极右差值,附
for(i=49;i>=(M_Row_End+3);i--) // recored_end_row
{
if(Black_Flag[i].Mid_flag&&Black_Flag[i-3].Mid_flag)
{
n = Runway_Midpoint[i-3] - Runway_Midpoint[i];
if(n>=2)
S_right++;
else if(n<=-2)
S_left++;
elseS_straight++;
}
}
void Road_S_Dis(void)
{
prespeed_value = speed_value;
if(curValidline<11)
{
if(gap<=24) //包括了直道和小S弯
{
straight_flag++;
straight_flag%=3000;
}
else if(gap<=65) //入弯口
{
if(S_right>3&&S_left>3) Big_S = 1;
elsebend_flag=1;
}
else {zhongsu++;zhongsu%=3000;}//较远前瞻的弯,给定中速
zhongsu3_flag = 0;
danwan_flag = 0;
}
else if(M_Row_End<=22)
{
if(gap>=75||S_right>= (50-M_Row_End)-6||S_left>=50-M_Row_End - 6)
{danwan_flag++;danwan_flag%=3000;} //单向弯道,给定中速2
else if(gap>=45)
{
if(S_right>3&&S_left>3) jiman_flag=1;//较近前瞻的S弯,给定慢速
else {zhongsu2_flag++;zhongsu2_flag%=3000;} //较近前瞻的缓慢程度弯道,给定中速
danwan_flag = 0;
}
else { jiaokuaisu_flag=1;danwan_flag = 0; } //较近前瞻的平缓曲线,给定较快速度
zhongsu3_flag = 0;
}
else if(M_Row_End<=33)
{
if(gap>=80) { danwan2_flag++;danwan2_flag%=3000;}//近前瞻的单向弯道,给定中速
else if(gap>=50||S_right> 50-M_Row_End-5||S_left>50-M_Row_End-5) //近前瞻的急偏道,给定中慢速
{
zhongsu3_flag++;zhongsu3_flag%=3000;
}
else { mansu_flag=1;zhongsu3_flag = 0 ; }//弯入十字中慢速
danwan_flag = 0;
}
else
{
if(gap>=20) {mansu++;mansu%=3000;}
else { kuaisu++;kuaisu%=3000; } //直道入十字情况
zhongsu3_flag = 0;
danwan_flag = 0;
}
if(straight_flag==1) Hightest_speed = longtest_speed;
else if (bend_flag==1) Hightest_speed = longtest_speed - 75 ;
else if (Big_S==1) Hightest_speed = longtest_speed - 80 ;
else if (zhongsu == 1) Hightest_speed = MidLongtest_speed + 10;
else if (danwan_flag> 0)
{
if(danwan_flag == 1)
Hightest_speed = MidLongtest_speed;
else if(danwan_flag == 2)
Hightest_speed = MidLongtest_speed + 50;
elseHightest_speed = Hightest_speed+10>longtest_speed+50?longtest_speed+50:Hightest_speed + 10;
}
else if (jiman_flag == 1) Hightest_speed = Midtest_speed;
else if (zhongsu2_flag == 1) Hightest_speed = MidLongtest_speed - 20;
else if (jiaokuaisu_flag == 1) Hightest_speed = MidLongtest_speed + 20;
else if (danwan2_flag == 1) Hightest_speed = MidLongtest_speed ;
else if (zhongsu3_flag>0) //进入十字弯减速,然后加速
{ if(zhongsu3_flag==1)
Hightest_speed = MidLongtest_speed;
else if(zhongsu3_flag==2)Hightest_speed = MidLongtest_speed+40;
elseHightest_speed = Hightest_speed + 10 > longtest_speed+50?longtest_speed+50:Hightest_speed + 10;
}
else if (mansu_flag == 1) Hightest_speed = MidLongtest_speed - 30;
else if (mansu == 1) Hightest_speed = Midtest_speed + 30;
else if (kuaisu == 1) Hightest_speed = MidLongtest_speed;
speed_percent = POW2(offset)/2500; if(speed_percent>1) speed_percent=1;
motercontrl = (Hightest_speed-lowtest_speed)*speed_percent;
speed_value = Hightest_speed-motercontrl;
if(L_Row_End == 49&&R_Row_End == 49) speed_value=prespeed_value;
if(speed_value< 80 ) speed_value = 80;
Carry_out_speedCOUNT++;
if(Carry_out_speedCOUNT>30)
{
Carry_out_speed(speed_value);
Carry_out_speedCOUNT = 31;
}
}。