船舶及其操作性能
船舶六大航行性能和船舶结构性能对船舶安全的影响
船舶六大航行性能和船舶结构性能对船舶安全的影响为了确保船舶在各种条件下的安全和正常航行,要求船舶具有良好的航行性能,这些航行性能包括浮力、稳性、抗沉性、快速性、摇摆性和操作性。
(一)浮性船舶在一定装载情况下的漂浮能力叫做船舶浮性。
船舶是浮体,决定船舶沉浮的力主要是重力和浮力。
其漂浮条件是:重力和浮力大小相等方向相反,而且两力应作用在同一铅垂线上。
船舶的平衡漂浮状态,简称船舶浮态。
船舶浮态可分为四种。
1、正浮状态是指船舶首、尾、中的左右吃水都相等的情况。
2、纵倾状态是指左右吃水相等而首尾吃水不等的情况。
船首吃水大于船尾吃水叫首倾;船尾吃水大于船首吃水叫尾顷。
为保持螺旋桨一定的水深,提高螺旋桨效率,一般未满载的船舶都应有一定的尾顷。
3、横倾状态是指船首尾吃水相等而左右吃水不等的情况,航行中不允许出现横倾状态。
4、任意状态是指既有横倾又有纵倾的状态。
(二)稳性稳性是指船舶在外力矩(如风、浪等)的作用下发生倾斜,当外力矩消除后能自行恢复到原来平衡位置的能力。
船舶稳性,按倾斜方向可分为横稳性和纵稳性;按倾斜角度大小可分为初稳性(倾角100以下)和大倾角稳性;按外力矩性质可分为静稳性和动稳性。
对于船舶来说,发生首尾方向倾覆的可能性极小,所以一般都着重讨论横稳性。
(三)抗沉性抗沉性是指船舶在一个舱或几个舱进水的情况下,仍能保持不致于沉没和倾覆的能力。
为了保证抗沉性,船舶除了具备足够的储备浮力外,一般有效的措施是设置双层底和一定数量的水密舱壁。
一旦发生碰撞或搁浅等致使某一舱进水而失去其浮力时,水密舱壁可将进水尽量限制在较小的范围内,阻止进水向其他舱室漫延,而不致使浮力损失过多。
这样,就能以储备浮力来补偿进水所失去的浮力,保证了船舶的不沉,也为堵漏施救创造了有利条件。
(四)快速性船舶在主机输出功率一定的条件下,尽量提高船速的能力叫船舶快速性。
快速性包含节能和速度两层意义,所以提高船舶快速性也应从这两方面入手,即尽量提高推进器的推力和减小船舶航行的阻力。
船舶操纵性能(理论1)
船舶操纵性能: 1。
旋回圈要素(反移量,旋回初径,进距, 横距, 定常旋回直径, 滞距,漂角;2。
舵效(RUDDER EFFECT);3。
船舶控速性;4。
流的影响;5。
风的影响;6。
靠离泊注意事项;7。
抛锚操纵;8。
潮流;9。
侧推器的使用;一.旋回圈要素1.反移量(KICK)船舶重心偏离原航向线向操舵相反一侧横移的距离称为反移量;船尾反移量最大值约为船长的1/10~1/5,比重心处反移量要大得多;船速快,舵角大,反移量则大.吃水增加,反移量有所减小2.旋回初径(TACTICAL DIAMETER)3.进距(ADVANCE)4.横距(TRANSFER)5.定常旋回直径(FINAL DIAMETER)6.滞距(REACH)7.漂角(DRIFT ANGLE)船尾部漂角最大;漂角越大,旋回性能越好,旋回直径越小,降速越多,横倾角越大,转心也前移.浅水中漂角较深水中小.8.转心(PIVOTING POINT)转心的位置,在开始操舵时约在重心稍前处,随船舶旋回不断加快,转心位置向前移动;漂角大,旋回性能好的船舶,转心越靠前;由于船舶前进中旋回时转心在重心之前,因此在旋回时船首向内偏移量比船尾向外偏移量来得小;后退时,转心位于重心之后,和前进中回转时转心位置相对称.9.旋回中船速10.旋回时间11.旋回中横倾先内倾后外倾旋回圈要素的使用1.反移量-----在船舶驶离码头或并靠它船时,船首刚刚摆出泊位,如果很快操大舵角进车,则会产生较大反移量而导致尾部触碰码头或他船;2.旋回初径和进距可以用来估算用舵旋回掉头所需水域的大小。
二.舵效(RUDDER EFFECT)影响舵效的因素1.吃水-------船舶吃水增加,舵效变差;满载船转动惯量大,故启动不易停转难,因此,满载大型船舶操纵时,一般宜早用舵,早回舵,舵角较大。
2.舵速-------经验表明,人力操舵能保持舵效的最低航速为3KN,自动舵为8KN。
3.舵角和舵面积比--------加大操舵角是提高舵效的有效措施,舵面积比增大,舵效变好;4.纵倾和横倾---------首倾时舵效较差,适当尾倾时舵效较好;船舶有横倾时,向有横倾侧转向时舵效差,反之,舵效较好。
船舶操纵性能
第一章船舶操纵性能第一节船舶变速运动性能船舶出于避碰、狭水道及港内航行或驶往泊地的需要而改变螺旋桨的转速和方向,进行启动、变速、停车、倒车操纵。
转速和方向改变后直至达到新的定常运动状态之前,存在着一段加速或减速运动的过程,该段过程称为变速运动过程,也称船舶惯性。
衡量船舶变速运动特性有两个重要指标,一是船舶完成变速运动所航进的路程,称为冲程;另一是完成变速运动所需的时间,称为冲时。
一、船舶启动性能船舶在静止状态中开进车,直至达到与主机输出功率相应的稳定船速前的变速运动,称为船舶起动变速运动。
在起动变速过程中,螺旋桨推力T与船舶阻力R之差,是船舶产生加速运动的动因。
由于启动后推力增加较快,而船速增加则较为缓慢,因此要注意合理用车。
即分段逐级加车,待达到相应转速的船速时,再提高用车的级别,以免主机超负荷工作。
完成启动变速运动所需的时间t和航进的路径s可用下列关系式估算。
W·V0t ≈ 0.004 ————R0W·V02s ≈ 0.101 ————R0式中,V0为最终定常速度,单位为kn;W为船舶实际排水量,单位为t;R0为达到最终定常速度V0时的船舶阻力;计算出的t单位为min;计算出的S单位为m。
根据经验,从静止状态逐级动车,直至达到海上速度,满载船舶约需航进20L左右的距离,轻载时约为满载的1/2~2/3。
二、船舶减速性能船舶以一定常速度(全速或半速)行驶中采取停车措施后,直至降到某一余速(2kn~4kn)前的变速运动称为船舶停车变速运动。
主机停车后,推力急剧下降到零。
开始时,船速较高,阻力也大,速降很快;但当速度减小后,阻力也随之减小,速降越来越慢,船很难完全停止下来,且在水中亦很难判断。
所以,通常以船速降至维持舵效的最小速度作为计算所需时间和船舶航进路程的标准。
主机停车后的时间、速度及航进路程存在如下关系。
达到速度V时所需的时间:W·V02 1 1t = 0.00105 —————(—— - ——)R0V V0达到速度V时所航进的路程:W·V02V0s = 0.075 ————— ℓn (——)R0V式中:R0为速度V0时船舶所受阻力,单位为t;W为船舶实际排水量,单位为t;t 的单位为min;S为m;速度单位为kn。
船舶的操纵性能
船舶的操纵性能(旋回性、冲程、保向性、改向性以及船舶变速运动性能)船舶驾驶人员必须较好地掌握船舶操纵知识,了解本船的操纵性能以及各种外界条件对本船操纵性能的影响,才能正确操纵船舶;准确控制船舶的运动。
往往一艘操纵性能良好的船舶,具有稳定地保持运动状态和迅速准确地改变运动状态的性能。
一、旋回性能是船舶操纵中的重要部分,它包括的因素有偏移或反移量、进距、横距、旋回初径、漂角、转心、旋回时间、旋回中的降速和横倾等。
这些数值是在船舶满载,半载以及空载等不同的状态下实测所得,掌握这些要素,对避让船舶、狭窄区域旋回或掉头等情况下安全操纵船舶有着重要的作用,也是判定船舶是否处于安全操纵范围内的重要参数。
偏移或反移量(KICK)是船舶重心向转舵相反一舷横移的距离,满载时其最大值约为船长的1%左右,但船尾的反移量较大,其最大值约为船长的1/10—1/5,可趁利避害的加以运用,如来船已过船首,且可能与船尾有碰撞危险,紧急情况下可向来船一侧满舵利用反移量避免碰撞(有人落水时向人落水一舷操满舵也是利用该反移量);进距(ADVCNCE)是开始转舵到航向转过任一角度时中心所移动的纵向距离,旋回资料中提供的纵距通常特指转过90度的进距,即最大进距,其值约为旋回初径的0.85—1.0倍,熟练掌握可常帮助我们正确判断船首来船或危险的最晚避让距离;横距(TRANSPER)是开始转舵到航向90度时船舶中心所一定的横向距离,其值约为旋回初径的0.55倍;旋回初径(TACTICAL DIAMETER)是船舶开始转舵到航向180度时重心所移动的横向距离,其值约为3-6倍船长;旋回直径(PINAL IAMETER)是船舶做定常旋回运动时的直径,约为旋回初径的0.9-1.2倍。
漂角(DRIPT AUGTE)是船舶旋回中船首与重心G点处旋回圈切线的方向夹角,其值约在3度—15度之间,漂角约大,其旋回性能越好;转心P是旋回圈的曲率中心O到船舶首尾线所做垂线的垂点,该点处的漂角和横移速度为零,转心P约在船首柱后1/3-1/5船长处,因此,旋回中尾部偏外较船首里为大,操船是应特别注意;旋回时间是旋回360度所需要的时间,它与排水量有密切关系,排水量大,旋回时间增加,比如万吨船快速满舵旋回一周约为6MIN,而超大型船舶旋回时间几乎增加一倍;旋回中的降速系由船体斜航阻力增加,舵阻力以及推进效率降低而造成的,所降部分为航速的1/4-2/4不等;旋回产生的横倾,它是一个应注意的不安全因素,旋回初出现向用舵方向一侧的内倾,倾角较小,时间也较短,不久随着转头角度速度增加,将出现向用舵反侧的外倾,对于GM值较小的集装箱船等,在操纵中应特别注意。
船舶操纵性能

第一章船舶操纵性能第一节船舶变速运动性能船舶出于避碰、狭水道及港内航行或驶往泊地的需要而改变螺旋桨的转速和方向,进行启动、变速、停车、倒车操纵。
转速和方向改变后直至达到新的定常运动状态之前,存在着一段加速或减速运动的过程,该段过程称为变速运动过程,也称船舶惯性。
衡量船舶变速运动特性有两个重要指标,一是船舶完成变速运动所航进的路程,称为冲程;另一是完成变速运动所需的时间,称为冲时。
一、船舶启动性能船舶在静止状态中开进车,直至达到与主机输出功率相应的稳定船速前的变速运动,称为船舶起动变速运动。
在起动变速过程中,螺旋桨推力T与船舶阻力R之差,是船舶产生加速运动的动因。
由于启动后推力增加较快,而船速增加则较为缓慢,因此要注意合理用车。
即分段逐级加车,待达到相应转速的船速时,再提高用车的级别,以免主机超负荷工作。
完成启动变速运动所需的时间t和航进的路径s可用下列关系式估算。
W·V0t ≈0.004 ————R0W·V02s ≈0.101 ————R0式中,V0为最终定常速度,单位为kn;W为船舶实际排水量,单位为t;R0为达到最终定常速度V0时的船舶阻力;计算出的t单位为min;计算出的S单位为m。
根据经验,从静止状态逐级动车,直至达到海上速度,满载船舶约需航进20L左右的距离,轻载时约为满载的1/2~2/3。
二、船舶减速性能船舶以一定常速度(全速或半速)行驶中采取停车措施后,直至降到某一余速(2kn~4kn)前的变速运动称为船舶停车变速运动。
主机停车后,推力急剧下降到零。
开始时,船速较高,阻力也大,速降很快;但当速度减小后,阻力也随之减小,速降越来越慢,船很难完全停止下来,且在水中亦很难判断。
所以,通常以船速降至维持舵效的最小速度作为计算所需时间和船舶航进路程的标准。
主机停车后的时间、速度及航进路程存在如下关系。
达到速度V时所需的时间:W·V02 1 1t = 0.00105 —————(——-——)R0V V0达到速度V时所航进的路程:W·V02V0s = 0.075 —————ℓn (——)R0V式中:R0为速度V0时船舶所受阻力,单位为t;W为船舶实际排水量,单位为t;t 的单位为min;S为m;速度单位为kn。
船舶操纵性能(理论2)

沉深横向力的大小与沉深比密切相关。当h/D>0.65~0.75时,该力很小;当h/D<0.65~0.75时,随着h/D的减小,该力将明显增大。此外,该力的大小还随桨叶进速的降低、转速的提高而增大(即滑失速度增大时,该力变大);相同的转速下,倒车时沉深横向力比正车时大。该横向力受螺旋桨工况影响(即螺旋桨处水面遮蔽程度、桨叶切面形状等桨致偏作用
1. 单螺旋桨船横向力
1).沉深横向力:螺旋桨桨轴中心线距水面的垂直距离h 称为螺旋桨的沉深。沉深 h 与螺旋桨直径D 之比h/D 称为沉深比。
原理:
当螺旋桨临近水面或部分桨叶露出水面工作时,桨叶扰动水面,掀起波浪,吸入空气,使得上下桨叶所处的流场不同,下桨叶所处的流场中的水密度大于上桨叶所处的流场水密度。下桨叶产生的水动力大于上桨叶,下桨叶的旋转阻力大于上桨叶。上下桨叶的旋转阻力的差值就是沉深横向力。
结论:
对于右旋单车船而言,进车时该力推尾向右,使船首向左偏转;倒车时,使船首向右偏转。左旋式单车船偏转方向与此相反。
2).伴流横向力
船舶航行期间有一股随船前进的水流,这股水流称为伴流.
伴流除降低舵力、提高桨之推力外,还产生横向力.
原理:
船舶前进时,船尾螺旋桨盘面处伴流流速分布规律是:上大下小,左右对称.由于伴流的这种特点,使得螺旋桨工作时,上桨叶进速较低,冲角较大,水动力较大,旋转阻力也大.相反,下桨叶旋转阻力较小.这种因伴流的影响而出现的上下桨叶的旋转阻力的差值而构成的横向力,称为伴流横向力.该力通过桨轴作用与船尾.
结论:
船舶前进中进车,船速越高,伴流上下的速度差也就越大,则伴流横向力也就越大. 船速一定时,转速提高,该力也增大.
此外,该力大小与螺旋桨盘面内伴流分布的均匀程度密切相关.具有U 型船尾、导流管以及
船舶的旋回性能-船舶操纵

2、描述船舶旋回运动状态的运动要素
1) 漂角(drift angle) 漂角(
船舶首尾线上某一点的 线速度与船舶首尾面的交角叫 做漂角, 如左图所示 。 做漂角 , 如左图所示。 船舶在 首尾线上不同点的漂角是不同 的 , 在船尾处, 由于其横移速 在船尾处 , 度最大, 因此漂角也最大 。 度最大 , 因此漂角也最大。 但 通常所说的漂角是指船舶重心 处的线速度Vt 与船舶首尾面的 处的线速度 Vt与船舶首尾面的 交角,也就是船首向与重心G 交角,也就是船首向与重心G点 处旋回圈切线方向的夹角, 处旋回圈切线方向的夹角,用B 表示之。 表示之 。 一般船舶的漂角大约 在3°~15°之间。 15°
第一节 船舶的旋回性
概述:旋回性是指定速直航的船舶操 某一大的舵角后进入定常旋回的运动性 能。
旋回性是船舶操纵性当中极 其重要的一种性能! 其重要的一种性能!
一、船舶旋回的运动过程
1、第一阶段(转舵阶段) 第一阶段(转舵阶段)
船舶向一舷操舵后, 船舶向一舷操舵后, 保持或近乎保持其直进速 度,同时开始进入基本沿 原航向前进而船尾外移同 时少量的向操舵一舷横倾 的初始旋回阶段 —反移内倾。
2) 转心(pivoting point)及其位置 转心( point)及其位置
旋回中的船舶可视为一方面船舶以一定的速度前进, 同时绕通过某一点的竖轴而旋转的运动的叠加,这一点就是 转心,通常以P 转心,通常以P代表之。船舶操舵旋回时,在旋回的初始阶 段,转心约在重心稍前处,以后随船舶旋回不断加快,转心 随着旋回中的漂角的增大而逐渐向船首方向移动;当船舶进 入定常旋回阶段即船舶旋回中的漂角保持不变时,转心P 入定常旋回阶段即船舶旋回中的漂角保持不变时,转心P逐 渐稳定于某一点,对于不同船舶,该点的位置大约在离船首 柱后1 柱后1/3~1/5船长处;船处于后退中,转心位置则在船尾 附近。 对于不同船舶而言,旋回性能越好、旋回中漂角B 对于不同船舶而言,旋回性能越好、旋回中漂角B越大 的船舶,其旋回时的转心越靠近船首。
船舶操纵知识点归纳

{(1)定常旋回阶段第一章船舶操纵性基础1、定义:保向、改向、变速。
2、船舶操纵性能:①变速性能:(1)停船性能(2)启动性能(3)倒车性能②旋回性能③保向性能④航向稳定性能3、一些主要概念:①转心:转轴与船舶首位线交点(垂足)通常位于船首之后1/3L (船长)它的位置稍有移动②通常作用在船上的力及力矩:水动力、风动力、舷力、推力③漂角:船舶运动速度与船首位线的夹角4、①水动力及其力矩:水给予船舶的运动方向相反的力②特点:船前进时,水动力中心在船中前船后退时,水动力中心在船中后③附加质量:惯性质量及惯性矩大型船舶纵向附加质量≈0.07m (m 为船的质量)附加惯性矩≈1.0Iz (Iz 为船的惯性矩)④水动力角:水动力方向与船首位线的夹角它是漂角的函数,随它漂角的增大而增大⑤水动力中心大概位置:前进平吃水:漂角为0时,中心在船首之后1/4L (船速越低,越靠近船中,前进速度为0时,在船中)后退平吃水:漂角为0时,中心距船中1/4L⑥水动力距:与力矩系数水线下面积、船体形状有关力矩系数是漂角的函数5、船体阻力摩擦阻力→主要阻力占70%—90%速度越大,其值越大(与V 2成正比)兴波阻力(低速时:与V 2成正比;船高速时:急剧增大)涡流阻力空气阻力:约占2%附体阻力6、船舶的变速性能①停船性能(冲程):与惯性有关②冲程:往往是对水移动的距离(对水移动速度为0)③一般万吨船:倒车停船距离为6—8L倒车冲程:5万:8~10L 10万吨:10~13L 15—20万吨:13~16L④当船速降到60%~70%时,转速降到25%~35%倒车⑤换向时间:从前进三到后退三所需时间汽轮机:120s~180s 内燃机:90s~120s 蒸汽机:60s~90s7、船舶的旋回性:转船阶段①旋回圈:过渡阶段—变速旋回阶段{剩余阻力:附加阻力:{②旋回初径:操舵后航向转过180°时,重心移动的横向距离一般为3~6L③旋回直径:船定常旋回时,重心轨迹圆的直径通常为旋回初径的0.9~1.2倍④进距:开始操舵到航向转过任一角度,重心移动的纵向距离通常为旋回初径的0.6~1.2倍⑤横距:指操舵让航向转过任一角度,垂心所走的横向距离约为旋回初径的1/2倍⑥制距:操舵开始时的重心位置到定常旋回率重心的纵向距离1~2L(2)船舶旋回运动是舷力的横向分量、水动力横向分量共同作用的结果(3)船舶旋回运动中的性能:降速车旋回的初始阶段:内倾;定常旋回:外倾旋回时间:旋回360°所需的时间;万吨级船旋回时间约为:6min(4)影响旋回特性的因素:①方形系数大旋回性好旋回圈小②船首水线下面积多旋回性好旋回圈小③船尾有钝材或船首瘦削旋回性差旋回圈大④舵面积大旋回性好旋回圈小⑤吃水增大横距、旋回初径增大,反移量减小⑥横倾,影响较小:低速时,向底舷一侧旋回旋回性好高速时,向高舷一侧旋回旋回性好船速低于某一值时,旋回圈加大⑦浅水:水变浅阻力加大转船舵力作用小旋回圈大旋回性变差⑧旋回圈在实际操船中的应用:反移量(kick ):向操舵相反一舷移动的距离0.1~0.2L (10%~25%L )9、操纵指数:k r r T =+.(T :追随性指数.r :r 的导数角速度<r>的加速度k:旋回性指数)阻尼力矩惯性力矩=T (T 大,惯性大,实际操舵中T 越小越好)阻尼力矩转舵力矩=k (k 大,转舵效应好,实际操舵k 越大越好)无因次的k’、T’)(')('v L T T v L k k ==(k/T 表示舵效){{第二节航向稳定性及保向性1、船向稳定性定义:船受外力干扰,干扰消失后,不用舵的前提下,船能自动恢复直线运动①恢复到原航向平行的航向航向稳定性(方向稳定性)稳定性②彻底恢复到原航行完全相同的航向上③直线稳定航向稳定性:方形系数低,长/宽高的船航向稳定性好瘦船稳定性好船首侧面积大航行稳定性差(例如:球鼻首bulous)2、保向性概念:船首线运动受外力干扰通过用船纠正使其恢复到原航向与航迹上继续做直线运动一般来说:航向稳定性好的船保向性好3、影响保向性因素瘦船好浅吃水差船尾肥大(有钝材)好干舷高差尾倾较首倾好轻载比满载保向性好(如有风,另当别论)船速高好水深浅好逆风逆流好第三节变速性能补充1、启动性能:静止定常运动定常速度v、所需距离与排水量成正比,与v2成反比,与阻力成正比经验:满载启动距离20L轻载为满载的1/2~2/32、减速性能:停车冲程:对水速度为0通常对水移动能维持舵效的最低速度,即认为停船万吨级船2节、超大船3节,即认为停船一般货船停船冲程8~20L、超大船停船冲程20L3、制动性能:前进三后退三变螺距船CPP是FPP船紧急停船距离的60%~80%总结:排水量大停船距离大船速大停船距离大污底严重停船距离小主机功率大停船距离小顺流顺风停船距离大第四节船舶操纵性试验1、旋回试验:在直航情况下,左35°或右35°,使船旋回旋回试验的目的:测定旋回圈,评价船舶旋回性2、冲程试验冲程条件:风流小水深≥3Bd 采用投掷法测定倒车使船停下(这种试验)要求船首改变90°3、螺旋试验、逆螺旋试验该试验目的,判断船舶航向稳定性好坏逆螺旋试验:求取船舶达某一回旋角速度所需舵角4、Z 性试验该试验主要评价船舶首摇抑制性,也可测定旋回性,追随性,航向稳定性获得操纵性指数第五节IMO 要求1、①对旋回性:进距<4.5L 旋回初径<5L操10°舵角航向改变10°时的进距<2.5L②对停船性:全速倒车停船距离<15L超大船倒车停船距离<20L③对于首摇抑制性、保向性3、Z 型试验结果:左右10°舷角第一超越角:a 、当L/v <10s 时:<10°b 、当L/v >30s 时:<20°c 、当10s <L/v <30s 时:[5+21(L/v )]°第二超越角:a 、当L/v <10s 时:<25°b 、当L/v >30s 时:<40°c 、当10s <L/v <30s 时:<[17.5+0.75(L/v )]°第三章车、舵、锚、缆、拖船第一节螺旋桨(propeller )1、关于阻力的补充摩擦阻力占到70%~80%,它与大约船速1.852的次方成正比2、吸入流与排出流①进入螺旋桨的流吸入流:范围广、流速慢、流线平行②螺旋桨排出的流排出流:范围小、流速快、水流旋转3、推力有船速关系(还与滑失有关)推力:排出流对船的反作用力船速一定,螺旋桨转速高推力大螺旋桨转速一定,船速高推力小4、滑失:螺旋桨对水实际速度与理论上能前进速度之差理论速度滑失滑失比=螺旋桨推力主要取决于其转速及滑失比。
船舶操纵性总结
操纵性绪论操纵性定义:船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变航速、航向和位置的性能。
操纵性内容:1. 航向稳定性:表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。
2.回转性:表示船舶在一定舵角作用下作圆弧运动的性能。
3.转首性和跟从性:表示船舶应舵转首及迅速进入新的稳定运动状态的性能。
4. 停船性能:船舶对惯性停船和盗车停船的相应性能。
附加质量和附加惯性矩:作不定常运动(操纵和耐波运动)的船舶,除了船体本身受到愈加速度成比例的惯性力外,同时船体作用于周围的水,使之得到加速度。
根据作用力和反作用力,水对船体存在反作用力,这个反作用力称为附加惯性力。
附加惯性力是与船的加速度成比例的,其比例系数称为附加质量。
船舶操纵一、操纵运动方程1.1坐标系一、固定坐标系:固定坐标系是固结在地球表面,不随时间而变化的,如图所示。
首向角ψ:X 0与X 的夹角(由X 0转向X ,顺时针为正)。
二、运动坐标系:运动坐标系是固结在船体上的,随船一起运动的,如图所示。
重心坐标:X OG 、Y OG ; 船速:V 重心G 瞬时速度; 航速角ψ0:X0轴与船速V 夹角(顺时针为正);漂角:β船速与X 轴夹角(顺时针为正); 回转角速度:γ=dψdt;回转曲率:R 右舷为正; 舵角:δ左舷为正。
三、枢心:回转时漂角为零点、横向速度为零的点。
1.2线性运动方程一、坐标转换00cos sin sin cos ψψψψ=-=+G G x u v y u v二、简化方程当重心在原点处:X G =0 运动坐标系一般方程:三、对于给定船型、给定流体中的运动情况船型参数和流体特性为已知条件; 操纵运动为缓变过程,忽略高阶小量; 忽略推进器转速影响;操舵过程短暂,忽略转舵加速度。
则可将给定船型流体中受力情况表示如下:由泰勒展开式,用水动力导数表示如下:四、简化后的操纵运动线性方程式:2()()()ψψψψψψ=--=++=++G G Z G X m u v x Y m v u x N I mx vu 00cos sin ψψ=+G G X mx my 00cos sin ψψ=-G G Y mymx ()()ψψψ=-=+=z X m u v Y m v u NI (,,,,,,)(,,,,,,)(,,,,,,)X X u v r u v r Y Y u v r u v r N N u v r u v r δδδ===v r v r v r v r Y Y v Y r Y v Y r Y N N v N r N v N r N δδδδ=++++=++++11111()()()()()()()()v v G r r G v v z r G r v ur v u u r r v u rm Y v Y v mx Y r mu Y r Y mx N v N v I N r mx u N r N δδδδ+=++∆+∆=+--+-+-=--+-+-=1.3水动力导数一、定义:匀速直线运动时,只改变一个运动参数,其他不变引起的作用于船舶水动力对运动参数的变化率。
船舶操纵重点
影响 因素
K’、T’ 变化
舵角 增加 同时 减小
吃水 增加 同时 增大
尾倾 增加 同时 减小
大可达到原航速的65%。
4) 旋回中船舶出现的横倾(List)
旋回中船舶出现的横倾是一个应予注意的不安全因素。船舶 在大风浪中大角度转向或掉头时,如船舶在波浪中横摇的相位与 旋回中外倾角的相位一致,则船舶将有倾覆的危险,这是操船中 应予避免的一个重要问题。另外值得注意的是,由于舵力所产生 的内倾力矩有利于抑制船舶的外倾角,因此当船舶在旋回中一旦 产生较大的外倾角时,切忌急速回舵或操相反舷舵,否则会进一 步增大外倾角,威胁船舶的安全。
对于不同船舶而言,旋回性能越好、旋回中漂角B越大 的船舶,其旋回时的转心越靠近船首。
3) 旋回中的降速
船舶在旋回中,主要由于船体斜航(存在漂角)时阻力增加,以 及舵阻力增加和推进效率降低速度的25 %~50%,而旋回性能很好的超大型油船在旋回中的降速幅度最
—反移内倾。
2、第二阶段 (过渡阶段)
操舵后随着船舶横 移速度的和漂角的增大, 船舶的运动逐渐偏离首 尾面而向外转动,进入 内倾消失,外倾出现并 逐渐增大的加速旋回阶 段
—正移外倾。
3、第三阶段 (定长旋回)
随着旋回阻尼力矩 的增大,当船舶所受的舵 力转船力矩N(a)、漂角水 动力转船力矩N(B)和阻 尼力矩N(r)相平衡时,船 舶的旋回角加速度变为零, 船舶的旋回角速度达到最 大值并稳定于该值,船舶 将进入稳定旋回阶段。
再如,当船舶前部已离出码头拟进车离泊时,如操大 舵角急欲转出,则由于尾外摆而将触碰码头。为避免发生事 故应适当减速,待驶出一段距离后再使用小舵角慢慢转出。
第二节 船舶操纵方程及船舶操纵性指数
一、船舶操纵运动方程
船舶操纵考点总结
第一章船舶操纵性能基本概念1.船舶操纵性能可分为固有操纵性和控制操纵性,固有操纵性:包括追随性、定长旋回性、航向稳定性;控制操纵性:包括改向性、旋回性、保向性。
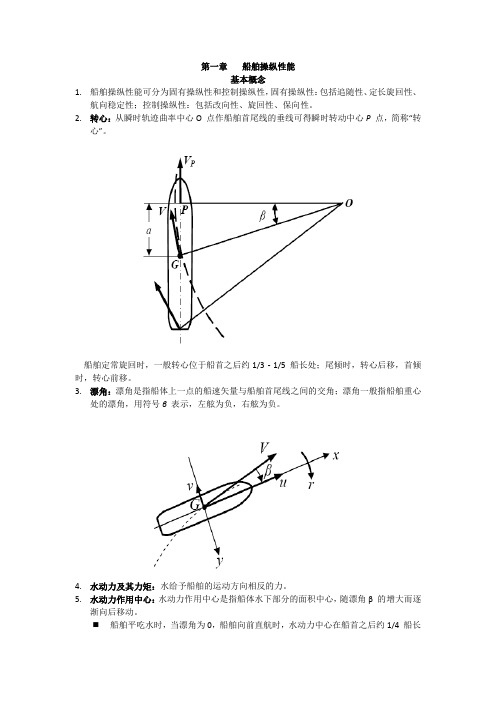
2.转心:从瞬时轨迹曲率中心O 点作船舶首尾线的垂线可得瞬时转动中心P 点,简称“转心”。
船舶定常旋回时,一般转心位于船首之后约1/3 - 1/5 船长处;尾倾时,转心后移,首倾时,转心前移。
3.漂角:漂角是指船体上一点的船速矢量与船舶首尾线之间的交角;漂角一般指船舶重心处的漂角,用符号β 表示,左舷为负,右舷为负。
4.水动力及其力矩:水给予船舶的运动方向相反的力。
5.水动力作用中心:水动力作用中心是指船体水下部分的面积中心,随漂角β 的增大而逐渐向后移动。
船舶平吃水时,当漂角为0,船舶向前直航时,水动力中心在船首之后约1/4 船长处,且船速越低,越靠近船中;⏹当漂角为180º,即船舶后退时,水动力中心在距离船尾之前约1/4 船长处,且船退速越低,越靠近船中。
⏹船舶空载或压载时往往尾倾较大,船体水下侧面积中心分布在船中之后,水动力作用中心要比满载平吃水时明显后移。
6.引航卡(Pilot Card):船长与引航员之间关于船舶操纵性能进行信息沟通的资料卡;每航次由船长填写;内容包括本船的主尺度、操纵装置性能、船在不同载况时主机不同转速下的航速以及船舶特殊操纵装置(侧推器)等信息。
7.驾驶台操纵性图(Wheelhouse Poster):详细概述船舶旋回性能和停船性能的图表资料;置于驾驶台显著位置;内容包括深水和浅水(=1.2),满载和压载情况下船舶的旋回圈轨迹图及制动性能(停船试验)资料。
8.船舶操纵手册(Maneuvering Booklet):详细描述船舶实船操纵性试验结果的手册;它是重要的船舶资料之一;内容包括旋回试验、Z形操纵试验和停船试验的试验条件、试验记录以及试验分析等;操纵手册包括全部驾驶台操纵性图上的全部信息;除实船试验结果之外,操纵手册中的大部分操纵信息估算结果。
船舶操纵性与控制性能分析
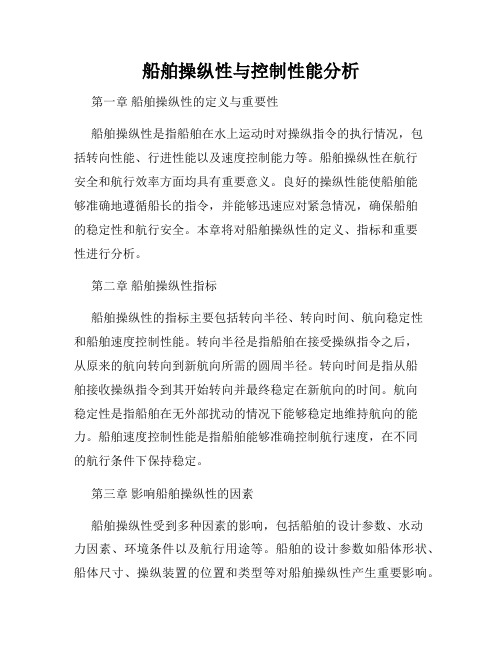
船舶操纵性与控制性能分析第一章船舶操纵性的定义与重要性船舶操纵性是指船舶在水上运动时对操纵指令的执行情况,包括转向性能、行进性能以及速度控制能力等。
船舶操纵性在航行安全和航行效率方面均具有重要意义。
良好的操纵性能使船舶能够准确地遵循船长的指令,并能够迅速应对紧急情况,确保船舶的稳定性和航行安全。
本章将对船舶操纵性的定义、指标和重要性进行分析。
第二章船舶操纵性指标船舶操纵性的指标主要包括转向半径、转向时间、航向稳定性和船舶速度控制性能。
转向半径是指船舶在接受操纵指令之后,从原来的航向转向到新航向所需的圆周半径。
转向时间是指从船舶接收操纵指令到其开始转向并最终稳定在新航向的时间。
航向稳定性是指船舶在无外部扰动的情况下能够稳定地维持航向的能力。
船舶速度控制性能是指船舶能够准确控制航行速度,在不同的航行条件下保持稳定。
第三章影响船舶操纵性的因素船舶操纵性受到多种因素的影响,包括船舶的设计参数、水动力因素、环境条件以及航行用途等。
船舶的设计参数如船体形状、船体尺寸、操纵装置的位置和类型等对船舶操纵性产生重要影响。
水动力因素包括航行速度、水流和风力等,在不同的水动力条件下,船舶的操纵性能会有所变化。
环境条件如水域深度、水温和水质等也可能对船舶操纵性产生影响。
此外,航行用途如货船、客船和军舰等也对船舶操纵性有所要求。
第四章船舶操纵性的改进方法为了提高船舶的操纵性能,设计师和船舶操纵员可以采取多种方法。
在设计方面,可以通过优化船体结构、改善操纵装置的设计和布置以及改进船舶的推进系统来提高船舶的操纵性。
在操纵操作方面,船舶操纵员可以通过合理的操作技术和训练来提高船舶的操纵性能。
此外,船舶的自动化技术和辅助操纵系统的引入也可以提高船舶的操纵能力。
第五章船舶操纵性的应用船舶操纵性在船舶的各个领域中都具有重要应用价值。
在商业航运中,良好的船舶操纵性能可以提高货船的航行效率,降低燃油消耗。
在客船运输中,船舶的操纵能力直接关系到乘客的舒适度和安全性。
船舶操纵性能模拟和优化设计技术研究

船舶操纵性能模拟和优化设计技术研究在现代船舶设计中,船舶操纵性能是一个非常重要的指标。
船舶操纵性能直接关系到船舶的安全性、航行性能以及操作人员的船舶操纵的难易程度。
因此,研究船舶操纵性能的模拟和优化设计技术对于提高船舶的操纵能力和提升船舶的性能非常必要。
船舶操纵性能的模拟研究主要通过计算机仿真来进行。
通过建立船舶运动数学模型,可以模拟出在不同操纵条件下船舶的运动轨迹、姿态变化等。
这些模拟结果可以用来预测船舶在不同航行状态下的操纵性能,帮助设计师优化船舶的设计参数以提高其操纵性能。
首先,船舶操纵性能模拟的关键是建立准确的船舶运动数学模型。
这个数学模型应该能够准确地描述船舶的运动特性,包括自由运动和操纵运动。
自由运动包括船舶的漂流运动、操舵运动和纵向运动等,而操纵运动则主要包括船舶的转弯和停止等操作。
建立这个数学模型需要考虑到船舶的外形参数、质量参数、操纵系统参数以及水动力参数等。
只有通过精确建模,才能得到准确的模拟结果。
其次,船舶操纵性能模拟还需要准确的操纵输入。
即通过模拟操纵系统,向数学模型提供准确的操纵指令。
这些操纵指令可以是舵角、舵转速、螺旋桨转速等。
这些指令的准确性对于模拟结果的准确性非常重要。
因此,在设计船舶操纵性能模拟时,需要考虑到操纵系统的灵敏度、延迟等因素。
另外,船舶操纵性能的模拟还需要考虑不同的航行状态。
船舶在不同航行状态下的操纵性能可能存在差异,因此需要在模拟中考虑到这些因素。
例如,船舶在不同海况下的操纵性能可能存在差异。
此外,船舶在不同负载条件下的操纵性能也可能有所不同。
因此,模拟中需要考虑到这些因素,并进行相应的优化设计。
在船舶操纵性能的优化设计中,可以通过改变船舶的几何形状、添加辅助设备或进行控制系统优化等方式来提高船舶的操纵性能。
一种常用的优化设计方法是流线型的优化。
通过改变船舶的几何造型,尤其是船舶的船型和船尾形状,可以减小船舶在操纵时的水动力阻力,提高船舶的操纵性能。
船舶性能

21
提高抗沉性的措施
增加储备浮力
➢ 增加干舷 ➢ 减少吃水 ➢ 增大舷弧以及使横剖面外倾
22
提高抗沉性的措施
采用分舱制
➢ 一般的客船或货船通常达到一舱制要求,而大型运输 船有二舱制和三舱制。
23
快速性
船舶快速性包括船舶阻力和船舶推进两部分。
研究内容:
R
T
1.减小船舶阻力,选择优良船型;
功率调定后,由于剧烈的摇荡,船舶在风浪中较静水中
航行时航速的降低值。主动减速是指船舶在风浪中航行,
为了减小风浪对船舶的不利影响,主动调低主机功率,
使航速比静水中速度下降的数值。
螺旋桨飞车
船舶在风浪中航行时,部分螺旋桨叶露出水面,转速剧增,
并伴有强烈振动的现象称为螺旋桨飞车。
50
50
环境条件与耐波性之间的关系
密甲板线相距76mm的平行线叫安全限界线。
19
20
船舶在一舱破损后的破舱水线不超过安全限界线,但 在两舱破损后,其破舱水线却超过了安全限界线,则 该船的抗沉性只能满足一舱不沉的要求,称为一舱制 船。
相邻两舱破损后能满足抗沉性要求的船称为两舱制船。 相邻三舱破损后仍能满足抗沉性要求的船称为三舱制
16
浮提态高和稳初性稳的性措影施响原因
降低船舶重心 增加船宽,可提高初稳性 增加型深,可提高大倾角稳性 减小自由液面 减小受风面积
17
船舶在各种装载状态下的初稳性和浮性计算
满载出港 满载到港 空载(或压载)出港 空载到港
18
抗沉性
抗沉性是指船舶在一舱或数舱破损进水后仍能 保持一定的浮性和稳性的能力. 我国船级社规定:船舶破损后的水线不得超过水密 甲板边线下76mm且 GM 不小于0.05m。这条与水
船舶及其操作性能

1.4船舶及其操作性能船舶,各种船只的总称。
船舶是能航行或停泊于水域进行运输或作业的交通工具,按不同的使用要求而具有不同的技术性能、装备和结构型式。
船舶是一种主要在地理水中运行的人造交通工具。
另外,民用船一般称为船,军用船称为舰,小型船称为艇或舟,其总称为舰船或船艇。
内部主要包括容纳空间、支撑结构和排水结构,具有利用外在或自带能源的推进系统。
外型一般是利于克服流体阻力的流线性包络,材料随着科技进步不断更新,早期为木、竹、麻等自然材料,近代多是钢材以及铝、玻璃纤维、亚克力和各种复合材料。
1.4.1概述船舶从史前刳木为舟起,经历了独木舟和木板船时代,1879年世界上第一艘钢船问世后,又开始了以钢船为主的时代。
船舶的推进也由19世纪的依靠人力、畜力和风力(即撑篙、划桨、摇橹、拉纤和风帆)发展到使用机器驱动。
1807年,美国的富尔顿建成第一艘采用明轮推进的蒸汽机船“克莱蒙脱” 号,时速约为8公里/小时;1839年,第一艘装有螺旋桨推进器的蒸汽机船“阿基米德”号问世,主机功率为58.8千瓦。
这种推进器充分显示出它的优越性,因而被迅速推广。
1868年,中国第一艘载重600吨、功率为288千瓦的蒸汽机兵船“惠吉” 号建造成功。
1894年,英国的帕森斯用他发明的反动式汽轮机作为主机,安装在快艇“透平尼亚”号上,在泰晤士河上试航成功,航速超过了60公里。
早期汽轮机船的汽轮机与螺旋桨是同转速的。
后约在1910年,出现了齿轮减速、电力传动减速和液力传动减速装置。
在这以后,船舶汽轮机都开始采用了减速传动方式。
1902〜1903年在法国建造了一艘柴油机海峡小船;1903年,俄国建造的柴油机船“万达尔”号下水。
20世纪中叶,柴油机动力装置遂成为运输船舶的主要动力装置。
英国在1947年,首先将航空用的燃气轮机改型,然后安装在海岸快艇“加特利克”号上,以代替原来的汽油机,其主机功率为1837千瓦,转速为3600 转/分,经齿轮减速箱和轴系驱动螺旋桨。
第一章 船舶操纵性能041019155926
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.4 船舶及其操作性能船舶,各种船只的总称。
船舶是能航行或停泊于水域进行运输或作业的交通工具,按不同的使用要求而具有不同的技术性能、装备和结构型式。
船舶是一种主要在地理水中运行的人造交通工具。
另外,民用船一般称为船,军用船称为舰,小型船称为艇或舟,其总称为舰船或船艇。
内部主要包括容纳空间、支撑结构和排水结构,具有利用外在或自带能源的推进系统。
外型一般是利于克服流体阻力的流线性包络,材料随着科技进步不断更新,早期为木、竹、麻等自然材料,近代多是钢材以及铝、玻璃纤维、亚克力和各种复合材料。
1.4.1 概述船舶从史前刳木为舟起,经历了独木舟和木板船时代,1879年世界上第一艘钢船问世后,又开始了以钢船为主的时代。
船舶的推进也由19世纪的依靠人力、畜力和风力(即撑篙、划桨、摇橹、拉纤和风帆)发展到使用机器驱动。
1807年,美国的富尔顿建成第一艘采用明轮推进的蒸汽机船“克莱蒙脱”号,时速约为8公里/小时;1839年,第一艘装有螺旋桨推进器的蒸汽机船“阿基米德”号问世,主机功率为58.8千瓦。
这种推进器充分显示出它的优越性,因而被迅速推广。
1868年,中国第一艘载重600吨、功率为288千瓦的蒸汽机兵船“惠吉”号建造成功。
1894年,英国的帕森斯用他发明的反动式汽轮机作为主机,安装在快艇“透平尼亚”号上,在泰晤士河上试航成功,航速超过了60公里。
早期汽轮机船的汽轮机与螺旋桨是同转速的。
后约在1910年,出现了齿轮减速、电力传动减速和液力传动减速装置。
在这以后,船舶汽轮机都开始采用了减速传动方式。
1902~1903年在法国建造了一艘柴油机海峡小船;1903年,俄国建造的柴油机船“万达尔”号下水。
20世纪中叶,柴油机动力装置遂成为运输船舶的主要动力装置。
英国在1947年,首先将航空用的燃气轮机改型,然后安装在海岸快艇“加特利克”号上,以代替原来的汽油机,其主机功率为1837千瓦,转速为3600转/分,经齿轮减速箱和轴系驱动螺旋桨。
这种装置的单位重量仅为2.08千克/千瓦,远比其他装置轻巧。
60年代先后,又出现了用燃气轮机和蒸汽轮机联合动力装置的大、中型水面军舰。
当代海军力量较强的国家,在大、中型船舰中,除功率很大的采用汽轮机动力装置外,几乎都采用燃气轮机动力装置。
在民用船舶中,燃气轮机因效率比柴油机低,用得很少。
原子能的发现和利用又为船舶动力开辟了一条新的途径。
1954年,美国建造的核潜艇“鹦鹉螺”号下水,功率为11025千瓦,航速33公里;1959年,前苏联建成了核动力破冰船“列宁”号,功率为32340千瓦;同年,美国核动力商船“萨瓦纳”号下水,功率为14700千瓦。
现有的核动力装置都是采用压水型核反应堆汽轮机,主要用在潜艇和航空母舰上,而在民用船舶中,由于经济上的原因没有得到发展。
核电池的出现,解决了这些问题,意味着可以批量的制造核电池为动力的船舶。
70~80年代,为了节约能源,有些国家吸收机帆船的优点,研制一种以机为主、以帆助航的船舶。
用电子计算机进行联合控制,日本建造的“新爱德丸”号便是这种节能船的代表。
1.4.1.1 历史古代埃及文物上绘有船只图样,埃及船只主要在尼罗河上航行。
古希腊时代、多使用帆船、多桨船。
16世纪甲板船登场,大航海时代到来。
多桨船直到18世纪末一直在地中海域使用,北欧甚至持续到19世纪初。
中国使用船只的历史也很悠久,在16世纪以前一直处于世界领先地位,在明代中国的造船业达到了鼎盛时期。
这为郑和下西洋提供了强大的物质保障。
《明史》《郑和传》记载,郑和的航海宝船,长44丈4尺,宽18丈,这是当时世界上最大的海船,折合现今长度为151.18米,宽61.6米。
船分四层,船上9桅可挂12个帆,锚重有几千斤,要动用二百人一起才能启航,一艘船可容纳千人以上。
古代中国是当时造船和航海的先驱。
春秋战国时期就有了造船工场,能够制造战船;汉代已能制造带舵的楼船;唐、宋时期,河船和海船都有突出的发展,发明了水密隔壁;明朝的郑和七次下西洋的宝船,在尺度、性能和远航范围方面,都居世界领先地位。
刘向《世本》记:古者观落叶因以为舟。
意思是说,中国人是因为看见落叶掉在水面上浮而不沉而悟到了船的原理。
这跟鲁班悟出锯子的原理有点类似,大概中国人自来亲于木,总是可以从它身上得到层出不穷的灵感。
舟形成之前,泛水之物一般是树、竹苇、葫芦之类的浮具、筏子。
筏起于浮具,又多有改进。
以桴济河,进而浮于海,这就有点“破天荒”的意思了。
孔子说:“道不行,乘桴浮于海。
”大概他老人家也有点自我欣赏的冒险性情在。
《艺文类聚》载:西周成王时,“于越献舟”。
越人,在古汉语里就是一个涉水的代名词,“水行而山处,以船为车,以楫为马,往如飘风,去则难从”。
可以想见,以舟为贡品,献与成王,那时越人的船就已造得比较好了,还有,献舟一路,取道东海,渡黄海,泛渤海,入黄河,逆流而上进入渭水,终达周都镐京,船的实用性能及航海技术都已不差。
春秋战国时,大国争霸,造船业及航海业迅速发展。
《越绝书》称:越迁都由会稽至琅琊,以水兵2800人“伐松柏以为桴”,沿海北上,气势已然磅礴。
至秦,徐福及童男女各3000人,乘楼船入海,寻找不老之药。
那楼船之巨,也已不难想象。
有了船,从西汉中期前后,海上丝绸之路开始从古合浦郡始发,可通往印度、斯里兰卡,算得上是世界上第一条真正的海上国际贸易航线。
三国时期,吴黄龙二年,孙权“遣将军卫温、诸葛直将甲士万人浮海,求夷洲及澶洲”,夷洲,今之台湾,澶洲,就是日本岛屿。
木船开始依赖人工划桨,既而有风帆及橹,橹是由长桨演变而来的,是另一种用人力推进船只的工具,也是控制船舶航向的工具。
一器多用,这是中国对世界造船与航海技术上的突出贡献。
东晋后期,法显和尚西行印度,寻求戒律,历时14年,数次濒死,终于在70岁高龄时,只身远航归国,他的船上所载,就是后来对中国产生了巨大影响的大量佛经。
随后,这位老人便与来中国的尼泊尔高僧佛驮跋陀罗一起翻译出了这些佛经。
隋炀帝好大喜功,多次征发民工无数,在江南采伐大量木料,大造龙舟及各种花船数万艘。
最大一艘龙舟共有四层,高45尺,长200尺,上层有正殿、内殿、东西朝堂,中间二层有120个房间,都“饰以丹粉,装以金碧珠翠,雕镂奇丽”。
随后,这位跟他的龙舟一样花的帝王数次乘船巡幸江都,酒池肉林地日夜寻欢作乐,终于就把江山丢了。
唐朝时,造船上已广泛使用了榫接钉合的木工艺和水密隔舱、黄底龙骨,大腊与防摇装置、漆涂防腐技术、金属锚等先进技术。
此时的战船名为楼船、蒙冲、斗舰、走舸、海鹃和游艇,最大的战船“和州载”,费时三年,“载甲三千人,稻米倍之”。
自西汉开辟了海上丝绸之路后,唐代与各国的海上交往达到了全面繁荣,长安成了国际性大都市,海外各国的使者、留学生、留学僧、商人不断地到中国来,学习中国先进的文化、政治典章制度,也就是从这时开始,中国人在海外被称为“唐人”。
作为当时世界上最强盛的发达国度,唐人开辟了多条海上航线,多次到达南洋、西亚、东非等地。
唐朝仍然有和尚到日本,著名的鉴真自743年到754年经12个年头,先后六次东渡日本,终于以非凡的信念和顽强的毅力到达日本的土地。
宋元两代,因海外贸易不断扩大,海上和内河运输规模远超前代。
造船业十分发达,浙江、福建、广东成为打造海船的中心,宋代的造船、修船已经开始使用船坞,并创造了运用滑道下水的方法。
许多港口都设置了市舶司以管理海外贸易,其中明州、广州、泉州、杭州尤为显要,是清代以前最著名的几大港口。
元时,中国积累了几百年的盛名频频吸引西方各国的贡使,传教士、商人、旅行家陆续来到中国,马可·波罗一呆就是17年,并深得忽必烈的信任与重用。
1291年,忽必烈“命备船十三艘,每艘具四桅,可张十二帆”,派马可·波罗从泉州起航,护送阔阔真公主至波斯成婚。
这大概就是古老的东方一个满载着瓷器和丝绸的童话飘向世界的开始。
1.4.1.2 中国船舶业的发展近代中国造船业发展迟缓。
1865~1866年,清政府相继创办江南制造总局和福州船政局,建造了“保民”“建威”“平海”等军舰和“江新”“江华”等长江客货船。
新中国成立后,船舶工业有了很大发展,50年代建成一批沿海客货船、货船和油船。
60年代以后,中国的造船能力提高得很快,陆续建成多型海洋运输船舶、长江运输船舶、海洋石油开发船舶、海洋调查船舶和军用舰艇、海监船,大型海洋船舶的吨位已达30万以上载重吨。
除少数特殊船舶外,中国已能设计制造各种军用舰艇和民用船舶。
中国造船在世界造船市场的份额迅速提高,2008、2009年这两年中国的造船业在国际市场的地位进一步的提高:2008年,中国造船完工量、承接新船订单和手持船舶订单分别占世界市场份额的29.5%、37.7%和35.5%;与2007年的同期相比,完工量和手持订单量分别提高了6.5%和2.5%;中国造船完工量、手持船舶订单量连续6年保持了快速的增长,三大造船指标已经全面超过日本成为世界第二造船大国。
2009年,中国造船完工量、新接船舶订单量、手持船舶订单量分别占世界造船市场份额的34.8%、61.6%和38.5%;比2008年底分别提高了5.3%、23.9%和3%;从年新接船舶订单来说,2009年底中国已经成为世界第一;从年底手持订单的份额来说,2009年底中国已经成为世界第一;从年底造船完工量来说,中国2009年底已经成为世界第二;三大造船指标中的两项都超过了日本,至此,中国已堪称世界造船第一大国。
从近十年中国造船业占世界造船市场份额的变化可以看出,中国造船业在全球市场上所占的比重正在明显上升,中国已经成为全球重要的造船中心之一。
而国际制造业的产业转移趋势是中国船舶制造业发展面临的最大机遇,在“十一五”期间中国造船业将对韩、日的领先地位形成有力的挑战。
但设计能力落后、配套产业发展滞后将是制约行业发展的主要瓶颈。
在短期内,国际及国内水运市场的繁荣为行业增长提供了有力地保障,而油价的持续高位运行以及钢铁等原材料价格的上涨则构成了行业运营的主要压力。
国际产业转移的趋势已经把造船业的巨大机遇展现在中国企业的面前,但在激烈的市场竞争环境,如何规避各种风险,如何把握机遇,是与企业发展命运攸关的问题。
2008年难以预料的风险接踵而来,9月,美国金融危机又如同洪水猛兽正迅速波及全球,全球金融危机全面暴发,受美国金融危机影响我国中小企业纷纷面临着倒闭,产品进出口、汽车行业、纺织行业均受到美国金融危机的严重打击。
我国船舶业,这一“中国制造”的支柱也面临着金融风暴严峻的冬天。
与发达国家相比我国船舶配套国产化率不到50%,发展前景广阔。
发达国家船舶配套国产化率已达90%以上,我国虽然已经成为世界第一造船大国,但是目前我国船舶配套国产化率还不到50%,按照《船舶配套业发展“十一五”规划纲要》以及《船舶工业调整和振兴规划》提出的发展目标:到2015年本土生产的船用设备装船率要达到80%以上,我国船舶配套行业发展前景广阔。