第11章ARM连接器
arm嵌入式技术原理与应用答案
arm嵌入式技术原理与应用答案【篇一:嵌入式系统原理与开发课后答案】章嵌入式系统概述:1、什么是嵌入式系统?是简单列举一些生活中常见的嵌入式系统的实例。
p3嵌入式系统是用于检测、控制、辅助、操作机械设备的装置。
以应用为中心,一计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积和功耗等严格要求的专用计算机系统。
3、是比较嵌入式系统与通用pc的区别。
p3(1)嵌入式系统是专用的计算机系统,而pc是通用的计算机系统。
(2)技术要求不同,通用pc追求高速、海量的数据运算;嵌入式要求对象体系的智能化控制。
(3)发展方向不同,pc追求总线速度的不断提升,存储容量不断扩大;嵌入式追求特定对象系统的智能性,嵌入式,专用性。
4、嵌入式体统有哪些部分组成?简单说明各部分的功能与作用。
p6(1)硬件层是整个核心控制模块(由嵌入式微处理器、存储系统、通信模块、人机接口、其他i/o接口以及电源组成),嵌入式系统的硬件层以嵌入式微处理器为核心,在嵌入式微处理器基础上增加电源电路、时钟电路、和存储器电路(ram和rom等),这就构成了一个嵌入式核心控制模块,操作系统和应用程序都可以固化在rom 中。
(2)中间层把系统软件与底层硬件部分隔离,使得系统的底层设备驱动程序与硬件无关。
一般包括硬件抽象层(hardware abstract layer,hal)和板级支持包(board support package,bsp)。
(3)软件层由实时操作系统(real time operating system,rtos)、文件系统、图形用户接口(graphical user interfaces,gui)、网络组件组成。
(4)功能层是面向被控对象和用户的,当需要用户操作是往往需要提供一个友好的人际界面。
5、嵌入式系统是怎么分类的?p7按照嵌入式微处理器的位数分类(4位、8位、16位、32位、64位);按照是实时性分类(硬实时系统式之系统对响应时间有严格的要求;软实时系统是对响应时间有一定要求);按照嵌入式软件结构分类(循环轮询系统、前后台系统、多任务系统);按照应用领域分类。
Keil基础知识
RW_RAM1 0x32000000 0x08000000 { ; RW data .ANY (+RW +ZI)
} }
2.1 Scatter file 语法
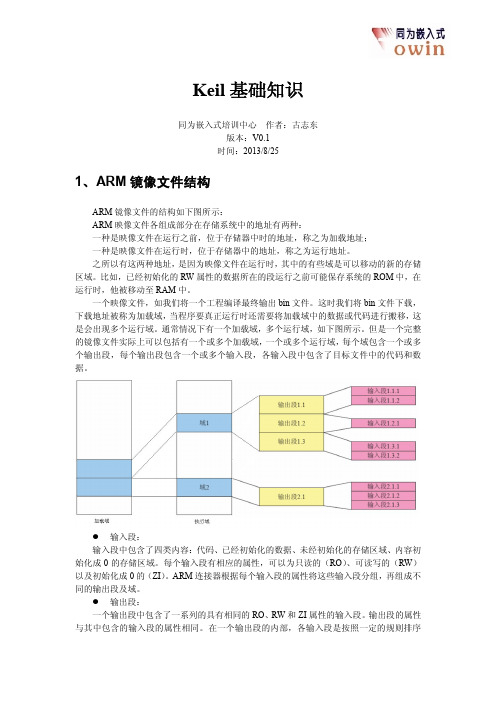
Scatter file (加载描述文件)用于指定映像文件内部各区域的装载域与运行域的位置。 arm 连接器将会根据 scatter file 生成一些区域相关的符号,他们是全局的供用户建立运行时 环境时使用。
... } }
2.1.1 加载域:
Load_region_name: 加载时域名称,最大 31 个 ASCII 字符,只用于标识一个加载时域; Base_designator: 本加载时域的起始地址,它有两种形式: 1 )base_address:本加载时域中的对象在连接时的起始地址,必须字对齐; 2 )+offset :本加载时域中的对象在连接时的起始地址是在前一个加载时域的结束地 址后偏移 offset(字节)处。 attribute_list: 本加载时域的属性,可选项;属性包括:PI,OVERLAY,ABSOLUTE,FIXED,UNINIT。 PI: 位置独立。与位置无关的代码 OVERLAY: 覆盖。只执行一次的代码,可以指示被覆盖
2.1.3 输入段
module_select_pattern:选择的模块名称(目标文件,库文件成员,库文件),模块 名可以使用通配符(*匹配任意多个字符,?匹配任意一个字符),名称不区分字母 大小写,如:
- disp*.o (+RO):匹配所有以 disp 开始的.o 目标文件作为输入段; - *pmic.lib(+RW):匹配所有以 pmic 结束的.lib 文件作为输入段; - .ANY(+ZI):匹配所有前面未匹配到的输入段,并指定连接器自行安排该输入段的 位置; 每一个模块都有自己的属性,一个用逗号分割的模式列表跟随在,模块名后面。该列表 中的每个模式定义了输入段名称或输入段属性的匹配方式: input_section_attr:按属性加载。输入段属性选择,表示该链接文件中,具有某种
ARM嵌入式系统基础教程课后习题答案
第一章思考与练习1、举出3个书本中未提到的嵌入式系统的例子。
答:红绿灯控制,数字空调,机顶盒2、什么叫嵌入式系统嵌入式系统:以应用为中心、以计算机技术为基础、软件硬件可裁剪、适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。
3、什么叫嵌入式处理器?嵌入式处理器分为哪几类?嵌入式处理器是为完成特殊的应用而设计的特殊目的的处理器。
嵌入式微处理器(Embedded Microprocessor Unit, EMPU)嵌入式微控制器(Microcontroller Unit, MCU)嵌入式DSP 处理器(Embedded Digital Signal Processor, EDSP)嵌入式片上系统(System On Chip)4、什么是嵌入式操作系统?为何要使用嵌入式操作系统?是一段在嵌入式系统启动后首先执行的背景程序,首先,嵌入式实时操作系统提高了系统的可靠性。
其次,提高了开发效率,缩短了开发周期。
再次,嵌入式实时操作系统充分发挥了 32 位 CPU 的多任务潜力。
第二章1、嵌入式系统项目开发的生命周期分哪几个阶段?各自的具体任务是什么?项目的生命周期一般分为识别需求、提出解决方案、执行项目和结束项目4 个阶段。
识别需求阶段的主要任务是确认需求,分析投资收益比,研究项目的可行性,分析厂商所应具备的条件。
提出解决方案阶段由各厂商向客户提交标书、介绍解决方案。
执行项目阶段细化目标,制定工作计划,协调人力和其他资源;定期监控进展,分析项目偏差,采取必要措施以实现目标。
结束项目阶段主要包括移交工作成果,帮助客户实现商务目标;系统交接给维护人员;结清各种款项。
2、为何要进行风险分析?嵌入式项目主要有哪些方面的风险?在一个项目中,有许多的因素会影响到项目进行,因此在项目进行的初期,在客户和开发团队都还未投入大量资源之前,风险的评估可以用来预估项目进行可能会遭遇的难题。
需求风险;时间风险;资金风险;项目管理风险3、何谓系统规范?制定系统规范的目的是什么?规格制定阶段的目的在于将客户的需求,由模糊的描述,转换成有意义的量化数据。
arm链接文件规则(mynote)

Arm中的链接文件的规则-T选项是ld命令中比较重要的一个选项,可以用它直接指明代码的代码段、数据段、博士生、段,对于复杂的连接,可以专门写一个脚本来告诉编译器如何连接。
-Ttext addr-Tdata addr-Tbss addrarm-elf-ld -Ttext 0x00000000 -g led_On.o -o led_on_elf ,运行地址为0x00000000,由于没有data和bss,他们会默认的依次放在后面。
相同的代码不同的Ttext,你可以对比一下他们之间会变的差异,ld会自动调整跳转的地址。
*简单的Linker script(1) SECTIONS命令:The SECTIONS command tells the linker how to map input sections into output sections, and how to place the output sections in memory.命令格式如下:SECTIONS{sections-commandsections-command......}其中sections-command可以是ENTRY命令,符号赋值,输出段描述,也可以是overlay描述。
(2) 地址计数器‘.’(location counter):该符号只能用于SECTIONS命令内部,初始值为‘0’,可以对该符号进行赋值,也可以使用该符号进行计算或赋值给其他符号。
它会自动根据SECTIONS命令内部所描述的输出段的大小来计算当前的地址。
(3) 输出段描述(output section description):前面提到在SECTIONS命令中可以作输出段描述,描述的格式如下:section [address] [(type)] : [AT(lma)]{output-section-commandoutput-section-command...} [>region] [AT>lma_region] [:phdr :phdr ...] [=fillexp]很多附加选项是用不到的。
ARM11主板原理图
R140 NC
R141 NC
E74 10uF/16V
R 188 R 189 R 190 R 191 R 192 R 193 R 194 R 195 R 196 R 197 R 198 R 199
R104 BT R BT L R109
10K 10K
E63 10uF/16V
GPS.L GPS.R BT.L BT.R RADIO.L E69 10uF/16V E71 10uF/16V RADIO.R Y-COM E68 10uF/16V X-COM E72 10uF/16V BT.R BT.L
pin8是大地
Q3
2SK3018 IR IN IPOD-L TV.L
R114 10K
E2 10U/16V IPOD.L 3G-L Y-COM E30 CDC-L 10U/16V R144 10K C53 104 1 2 3 4 5 6 7 8
U23 TC4052BF 0Y 2Y Y-COM 3Y 1Y INH VEE VSS VDD 2X 1X X-COM 0X 3X A B 16 15 3G-R 14 CDC-R 13 X-COM 12 IPOD.R 11 10 9 E1 E31 R229 R230 10U/16V 10U/16V 4K7 4K7 R113 10K R145 10K
U25 24C256 SDA VSS SCL A2 WC A1 VCC A0 R143 NC L8 4 3 2 1
IN 1
IN 2
IN 3
D19 Z5W27V
-R LO U T + R LO U T -LF O U T + LF O U T +R FOUT -R F O U T +R R OUT -R R O U T
ARM外围接口电路工作原理
ARM外围接口电路工作原理ARM11是一种基于ARM架构设计的32位处理器。
它具有较高的计算能力和低功耗特性,被广泛应用于嵌入式系统和移动设备中。
ARM11外围接口电路是ARM11芯片上的硬件模块,用于扩展处理器的功能和连接外部设备。
1.串行接口ARM11芯片上的串行接口可以实现与外部设备的通信。
它一般包括UART(通用异步接收器/发送器)和SPI(串行外设接口)等模块。
UART模块实现了与外部设备的异步串口通信,而SPI模块则是一种同步串行接口,用于高速数据传输。
2.并行接口ARM11芯片上的并行接口通常用于与外部存储器、显示器、键盘等设备的连接。
ARM11芯片一般配备了SRAM接口、SDRAM接口和LCD接口等模块。
SRAM接口和SDRAM接口用于连接外部存储器,实现数据的读写操作。
LCD接口用于连接液晶显示器,实现图像和文字的显示。
3.时钟时钟模块是ARM11芯片中非常重要的一个模块,它用于提供系统的时钟信号。
ARM11芯片一般具有内部和外部时钟源,通过时钟分频器将外部时钟源分频后,提供给不同的模块使用。
时钟模块还负责产生处理器的时钟信号,控制处理器的工作频率。
4.中断控制中断控制模块用于处理外部的中断请求信号,并向处理器发送中断请求。
当外部设备需要与ARM11芯片通信或请求处理器的服务时,会产生中断请求信号。
中断控制模块会接收到这个信号,然后通过处理器的中断控制单元将中断请求传递给处理器,使得处理器能够及时响应和处理。
当需要与外部设备通信时,首先需要配置相关的接口模块。
比如,在使用串行接口进行通信时,需要设置相关的波特率和数据格式;在使用并行接口连接显示器时,需要配置显示器的分辨率和显示模式。
然后,通过编程方式向相应的接口模块写入数据或读取数据,实现与外部设备的数据交互。
在整个工作过程中,时钟模块起着关键的作用。
时钟模块提供稳定的时钟信号,保证各个接口模块按照预定的时序要求工作,从而实现数据的准确传输。
ARM处理器的Boot与Remap
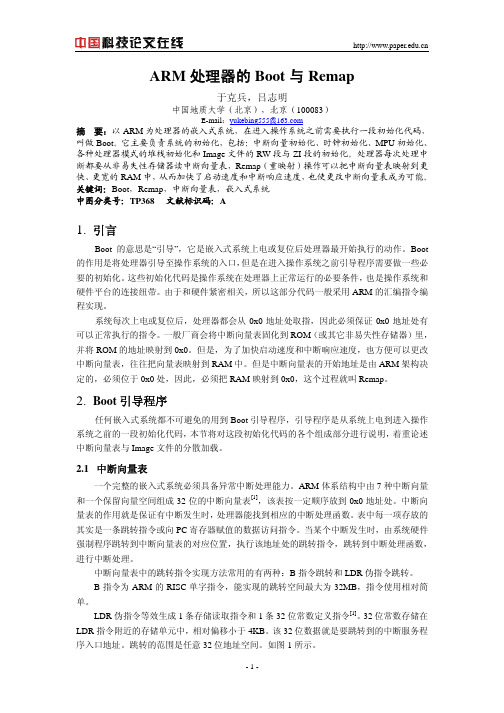
ARM处理器的Boot与Remap于克兵,吕志明中国地质大学(北京),北京(100083)E-mail:yukebing555@摘要:以ARM为处理器的嵌入式系统,在进入操作系统之前需要执行一段初始化代码,叫做Boot。
它主要负责系统的初始化,包括:中断向量初始化、时钟初始化、MPU初始化、各种处理器模式的堆栈初始化和Image文件的RW段与ZI段的初始化。
处理器每次处理中断都要从非易失性存储器读中断向量表,Remap(重映射)操作可以把中断向量表映射到更快、更宽的RAM中,从而加快了启动速度和中断响应速度,也使更改中断向量表成为可能。
关键词:Boot,Remap,中断向量表,嵌入式系统中图分类号:TP368 文献标识码:A1.引言Boot的意思是“引导”,它是嵌入式系统上电或复位后处理器最开始执行的动作。
Boot 的作用是将处理器引导至操作系统的入口,但是在进入操作系统之前引导程序需要做一些必要的初始化。
这些初始化代码是操作系统在处理器上正常运行的必要条件,也是操作系统和硬件平台的连接纽带。
由于和硬件紧密相关,所以这部分代码一般采用ARM的汇编指令编程实现。
系统每次上电或复位后,处理器都会从0x0地址处取指,因此必须保证0x0地址处有可以正常执行的指令。
一般厂商会将中断向量表固化到ROM(或其它非易失性存储器)里,并将ROM的地址映射到0x0。
但是,为了加快启动速度和中断响应速度,也方便可以更改中断向量表,往往把向量表映射到RAM中。
但是中断向量表的开始地址是由ARM架构决定的,必须位于0x0处,因此,必须把RAM映射到0x0,这个过程就叫Remap。
2.Boot引导程序任何嵌入式系统都不可避免的用到Boot引导程序,引导程序是从系统上电到进入操作系统之前的一段初始化代码,本节将对这段初始化代码的各个组成部分进行说明,着重论述中断向量表与Image文件的分散加载。
2.1中断向量表一个完整的嵌入式系统必须具备异常中断处理能力。
第一章 ARM实验板硬件结构与开发环境
6
U15
ADC2
15
RP3
5
JP1 JP2 J1
16
S1
VIN2 VIN1
S2
S3
S4
S5
S6
S7
S8
4
S9 S10 S11 S12 S13 S14 S15 S16 Key
1. 电源插座 2. 外部电压测试端口 3. 按键区域(17个按键) 4. RS232接口 5. 4位数码管 6. 触摸屏接口 7. 液晶屏接口 8. 液晶屏亮度调节旋钮 9. 8个LED灯 10.核心板插座 11.喇叭接口 12.LED灯外部测试端口 13.蜂鸣器 14.电位器区域 15.AD采样源设置跳线 16.外部端口连接区域
DA
RS485
Count
ADC1
1
PWM
RP4 123
RP1
RP2
1
2
3
RS232
二、开发环境
ADS集成开发环境,其成熟版本为ADS1.2。支持软件调试及JTAG硬 件仿真调试,支持汇编、C和C++源程序,具有编译效率高,系统库功 能强等特点。
ADS1.2集成开发环境的组成
名称 代码生成工具 集成开发环境 调试器 指令模拟器 ARM开发包 ARM应用库 描述 ARM汇编器,ARM的C、C++编译器, Thumb的C、C++编译器,ARM连接器 Code Warrior IDE AXD,ADW/ADU,armsd ARMulator 一些底层的程序例子,使用程序 C、C++函数库等 使用方法 由Code Warrior IDE调用 工程管理,编译链接 仿真调试 由AXD调用 由Code Warrior IDE调用 用户程序使用
ARM入门教程.pdf

目录第1章 ARM微处理器概述 51.1 ARM-Advanced RISC Machines 51.2 ARM微处理器的应用领域及特点 51.2.1 ARM微处理器的应用领域 51.2.2 ARM微处理器的特点 61.3 ARM微处理器系列 61.3.1 ARM7微处理器系列 61.3.2 ARM9微处理器系列 71.3.3 ARM9E微处理器系列 71.3.4 ARM10E微处理器系列 71.3.5 SecurCore微处理器系列 81.3.6 StrongARM微处理器系列 81.3.7 Xscale处理器 81.4 ARM微处理器结构 81.4.1 RISC体系结构 81.4.2 ARM微处理器的寄存器结构 91.4.3 ARM微处理器的指令结构 91.5 ARM微处理器的应用选型 101.6 本章小节10第2章 ARM微处理器的编程模型 112.1 ARM微处理器的工作状态 112.2 ARM体系结构的存储器格式 112.3 指令长度及数据类型 122.4 处理器模式 122.5 寄存器组织 132.5.1 ARM状态下的寄存器组织 132.5.2 Thumb状态下的寄存器组织 152.5.3 程序状态寄存器 162.6 异常(Exceptions) 182.6.1 ARM体系结构所支持的异常类型 182.6.2 对异常的响应 182.6.3 从异常返回 192.6.4 各类异常的具体描述 192.6.5 异常进入/退出小节 202.6.6 异常向量(Exception Vectors) 202.6.7 异常优先级(Exception Priorities) 212.6.8 应用程序中的异常处理 212.7 本章小节21第3章 ARM微处理器的指令系统 223.1 ARM微处理器的指令集概述 223.1.1 ARM微处理器的指令的分类与格式 223.1.2 指令的条件域 233.2 ARM指令的寻址方式 233.2.1 立即寻址 243.2.2 寄存器寻址 243.2.2 寄存器间接寻址 243.2.3 基址变址寻址 243.2.4 多寄存器寻址 253.2.5 相对寻址 253.2.6 堆栈寻址 253.3 ARM指令集 253.3.1 跳转指令 253.3.2 数据处理指令 263.3.3 乘法指令与乘加指令 303.3.4 程序状态寄存器访问指令 323.3.5 加载/存储指令 323.3.6 批量数据加载/存储指令 343.3.7 数据交换指令 353.3.8 移位指令(操作) 353.3.9 协处理器指令 363.3.10 异常产生指令 383.4 Thumb指令及应用 383.5 本章小节39第4章 ARM程序设计基础 404.1 ARM汇编器所支持的伪指令 404.1.1 符号定义(Symbol Definition)伪指令 404.1.2 数据定义(Data Definition)伪指令 414.1.3 汇编控制(Assembly Control)伪指令 434.1.4 其他常用的伪指令 454.2 汇编语言的语句格式 484.2.1 在汇编语言程序中常用的符号 494.2.2 汇编语言程序中的表达式和运算符 494.3 汇编语言的程序结构 524.3.1 汇编语言的程序结构 524.3.2 汇编语言的子程序调用 524.3.3 汇编语言程序示例 534.3.4 汇编语言与C/C++的混合编程 554.4 本章小节56第5章应用系统设计与调试 575.1 系统设计概述 575.2 S3C4510B概述 585.2.1 S3C4510B及片内外围简介 585.2.2 S3C4510B的引脚分布及信号描述 615.2.3 CPU内核概述及特殊功能寄存器(Special Registers) 675.2.4 S3C4510B的系统管理器(System Manager) 725.3 系统的硬件选型与单元电路设计 825.3.1 S3C4510B芯片及引脚分析 825.3.2 电源电路 835.3.3 晶振电路与复位电路 835.3.4 Flash存储器接口电路 855.3.5 SDRAM接口电路 895.3.6 串行接口电路 935.3.7 IIC接口电路 945.3.8 JTAG接口电路 955.3.9 10M/100M以太网接口电路 965.3.10 通用I/O接口电路 1005.4 硬件系统的调试 1015.4.1 电源、晶振及复位电路 1015.4.2 S3C4510B及JTAG接口电路 1025.4.3 SDRAM接口电路的调试 1035.4.4 Flash接口电路的调试 1055.4.5 10M/100M以太网接口电路 1055.5 印刷电路板的设计注意事项 1055.5.1 电源质量与分配 1055.5.2 同类型信号线的分布 1065.6 本章小节 106 第6章部件工作原理与编程示例 1076.1 嵌入式系统的程序设计方法 1076.2 部件工作原理与编程示例 1086.2.1 通用I/O口工作原理与编程示例 1086.2.2 串行通讯工作原理与编程示例 1116.2.3 中断控制器工作原理与编程示例 1206.2.4 定时器工作原理与编程示例 1236.2.5 GDMA工作原理与编程示例 1276.2.6 IIC总线控制器工作原理 1336.2.7 以太网控制器工作原理 138主要特性139MAC功能模块 140 带缓冲DMA接口(Buffered DMA Interface) 144以太网控制器特殊功能寄存器(Ethernet Controller Special Registers) 147MAC寄存器(Media Access Control(MAC)Register) 154以太网控制器的操作(Ethernet Controller Operation) 160发送一个帧(Transmitting a Frame) 162接收一个帧(Receiving a Frame) 1626.2.8 Flash存储器工作原理与编程示例 1626.3 BootLoader简介 1676.4 本章小节 167 第7章嵌入式uClinux及其应用开发 1687.1 嵌入式uClinux系统概况 1687.2 开发工具GNU的使用 1707.2.1 GCC编译器 1707.2.2 GNU Make 1727.2.3 使用GDB调试程序 1777.3 建立uClinux开发环境 1807.3.1 建立交叉编译器 1817.3.2 uClinux针对硬件的改动 1847.3.3 编译uClinux内核 1857.3.4 内核的加载运行 1877.4 在uClinux下开发应用程序 1887.4.1 串行通信 1907.4.2 socket编程 1957.4 .3 添加用户应用程序到uClinux 2027.4.4 通过网络添加应用程序到目标系统 2057.5 本章小结 207 第8章ARM ADS集成开发环境的使用 2098.1 ADS集成开发环境组成介绍 2098.1.1 命令行开发工具 2098.1.2 ARM运行时库 2188.1.3 GUI开发环境(Code Warrior和AXD) 2198.1.4 实用程序 2218.1.5 支持的软件 2218.2 使用ADS创建工程 2228.2.1 建立一个工程 2228.2.2 编译和链接工程 2258.2.3 使用命令行工具编译应用程序 2298.3 用AXD进行代码调试 2308.4 本章小结 233第1章 ARM微处理器概述本章简介ARM微处理器的一些基本概念、应用领域及特点,引导读者进入ARM技术的殿堂。
ARM开发环境

第11章ARM开发环境ADS 1.2
11.1 ADS 1.2简介
ARM ADS全称为ARM Developer Suite,是ARM公司推出的新一代ARM集成开发工具。
现在ADS的最新版本是1.2,它取代了早期的1.1和1.0,除了可以安装在windows NT4、windows 2000、windows 98和windows95操作系统下,还支持windows ME和windows XP 操作系统。
ADS由命令行开发工具、ARM实时库、GUI开发环境(Code Warrior和AXD)、实用程序和支持软件组成。
有了这些部件,用户就可以为ARM系列的RISC处理器编写和调试自己开发的应用程序了。
下面介绍ADS的各个组成部分。
11.1.1 命令行开发工具
这些工具完成将源代码编译、链接成可执行代码的功能。
ADS提供以下命令行开发工具。
1.armcc
armcc是ARM C编译器。
这个编译器通过Plum Hall C V alidation Suite为ARSI C的一致性测试。
armcc用于将用ANSIC编写的程序编译成32位ARM指令代码。
因为armcc是我们最常用的编译器,下面对其进行详细的介绍。
在命令控制台环境下,输入命令:
armcc-help
《ARM嵌入式系统开发典型模块》免费样章。
ARM分散加载文件
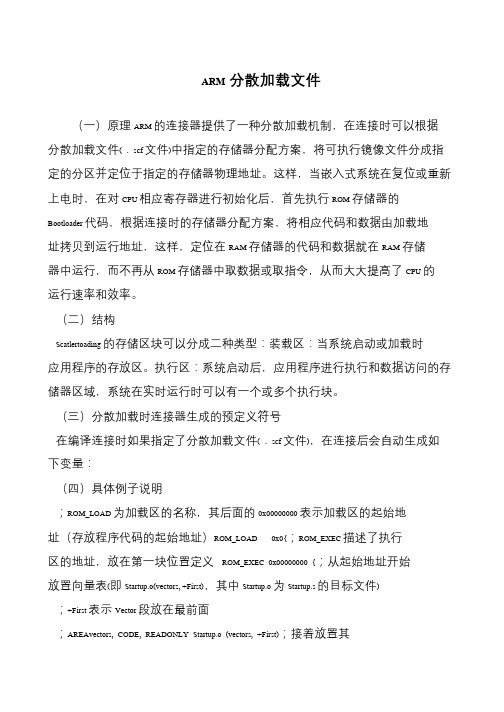
ARM分散加载文件(一)原理ARM 的连接器提供了一种分散加载机制,在连接时可以根据分散加载文件(.scf 文件)中指定的存储器分配方案,将可执行镜像文件分成指定的分区并定位于指定的存储器物理地址。
这样,当嵌入式系统在复位或重新上电时,在对CPU 相应寄存器进行初始化后,首先执行ROM 存储器的Bootloader 代码,根据连接时的存储器分配方案,将相应代码和数据由加载地址拷贝到运行地址,这样,定位在RAM 存储器的代码和数据就在RAM 存储器中运行,而不再从ROM 存储器中取数据或取指令,从而大大提高了CPU 的运行速率和效率。
(二)结构Scatlertoading 的存储区块可以分成二种类型:装载区:当系统启动或加载时应用程序的存放区。
执行区:系统启动后,应用程序进行执行和数据访问的存储器区域,系统在实时运行时可以有一个或多个执行块。
(三)分散加载时连接器生成的预定义符号在编译连接时如果指定了分散加载文件(.scf 文件),在连接后会自动生成如下变量:(四)具体例子说明;ROM_LOAD 为加载区的名称,其后面的0x00000000 表示加载区的起始地址(存放程序代码的起始地址)ROM_LOAD 0x0{;ROM_EXEC 描述了执行区的地址,放在第一块位置定义ROM_EXEC 0x00000000 {;从起始地址开始放置向量表(即Startup.o(vectors, +First),其中Startup.o 为Startup.s 的目标文件) ;+First 表示Vector 段放在最前面;AREAvectors, CODE, READONLY Startup.o (vectors, +First);接着放置其。
IAR for ARM安装、使用说明
IAR EWARM安装使用指南——For Luminary Micro Stellaris系列——Use J-link仿真器北京精仪达盛科技有限公司目录第1章EWARM 集成开发环境 (3)1.1 IAR EWARM 简介 (3)1.2 J-LINK仿真器介绍 (3)1.3 IAR EWARM 的安装 (5)1.3.1 IAR EWARM 的安装步骤如 (5)1.3.2 安装J-LINK 驱动 (7)第2章安装流明诺瑞驱动库 (8)2.1 下载最新库文件 (8)2.2 拷贝连接器命令文件 (8)2.3 拷贝驱动库头文件 (10)2.4 拷贝底层驱动函数库 (12)第3章在EWARM 中新建一个新项目 (15)3.1 建立一个项目文件目录 (15)3.2 新建工作区 (15)3.3 生成新项目 (16)3.4 添加/新建文件 (18)3.4.1 建立文件组 (18)3.4.2 添加对应文件 (19)3.5 项目选项设置 (21)3.6 通用选项设置 (22)3.7 C/C++编译器选项设置 (23)3.7.1 Assembler 选项设置 (24)3.7.2 Linker 选项设置 (24)3.7.3 Debugger 选项设置 (26)第4章编译和运行应用程序 (28)4.1 编译连接处理 (28)4.2 查看MAP 文件 (28)4.3 加载应用程序 (29)第5章生成hex 文件 (30)第1章EWARM 集成开发环境1.1 IAR EWARM 简介IAR Embedded Workbench for ARM(下面简称IAR EWARM)是一个针对ARM 处理器的集成开发环境,它包含项目管理器、编辑器、C/C++编译器和ARM 汇编器、连接器XLINK 和支持RTOS 的调试工具C-SPY。
在EWARM 环境下可以使用C/C++和汇编语言方便地开发嵌入式应用程序。
比较其他的ARM 开发环境,IAR EWARM 具有入门容易、使用方便和代码紧凑等特点。
ARM嵌入式系统结构与编程习题答案 清华大学出版社 最详细版
ARM嵌入式系统结构与编程习题答案清华大学出版社最详细版arm嵌入式系统结构与编程习题答案清华大学出版社最详细版一《arm嵌入式系统结构与编程》习题答案第一章为绪论1.国内嵌入式系统行业对“嵌入式系统”的定义是什么?如何理解?答:国内嵌入式行业普遍接受的定义是:以应用为中心,以计算机技术为基础,软硬件可定制,满足应用系统在功能、可靠性、成本、体积和功耗等方面的严格要求的专业计算机系统。
从这个定义可以看出,嵌入式系统与应用紧密结合,具有很强的特殊性。
它必须根据实际系统需求进行合理定制和使用。
因此,嵌入式系统是“为特定的人定制的”。
2.嵌入式系统是从何时产生的,简述其发展历程。
答:从20世纪70年代单片机的出现到目前各式各样的嵌入式微处理器,微控制器的大规模应用,嵌入式系统已经有了30多年的发展历史。
嵌入式系统的出现最初是基于单片机的。
英特尔于1971年开发了第一款4位总线结构的微处理器4004,可以说是嵌入式系统的雏形。
80年代初的8051是单片机历史上值得纪念的一页。
20世纪80年代初,出现了一种商业化的“实时操作系统内核”。
在实时内核下编写应用软件,可以加快新产品的开发速度,节约资金。
在20世纪90年代,实时内核发展为实时多任务操作系统。
进入21世纪以来,嵌入式系统得到了极大的发展。
在硬件方面,单片机的性能有了很大的提高,尤其是ARM技术的出现和改进,为嵌入式操作系统提供了强大的硬件载体,将嵌入式系统推向了一个新的阶段。
3.当前最常用的源码开放的嵌入式操作系统有哪些,请举出两例,并分析其特点。
答:主要有嵌入式linux和嵌入式实时操作内核uc/os-ii嵌入式Linux操作系统是一种针对嵌入式微控制器的特点而定制的Linux操作系统,包括通用的嵌入式通信协议和通用驱动程序,并支持多种文件系统。
它主要具有以下特点:开源、易移植、内核小、功能强大、运行稳定、效率高。
uc/os是源码工卡的实时嵌入式系统内核,主要有以下特点:源码公开,可移植性强,可固化,可剪裁,占先式,多任务,可确定性,提供系统服务等。
ARM嵌入式软件开发教程
ADS默认的标准C库
ANSI C 应用程序调用的C库 函数 eg: fputc()
C Library 设备驱动层 使用semihosting SWI’s eg: _sys_write()
input/ output
error handling
stack & heap setup
other
Debug Agent
可查看在ADS Embedded example目录下的retarget.c,可看到更多的重定向例子 你可以确定有不在连接时使用semihosting SWI 的吗?…...
TM
9
9
火龙果 整理
消除C库函数中的semi hosting
为了确保在连接时没有函数使用了semi hosting SWIs ,你可以在程序中加入 下面的句子:
TM
13
13
火龙果 整理
Scatter 描述文件
LOAD_ROM 0x0000 0x4000 { EXEC_ROM 0x0000 0x4000 { * (+RO) } RAM 0x10000 0x8000 { * (+RW,+ZI) } } Execute View
0x18000
火龙果 整理
嵌入式软件开发
TM
1
火龙果 整理
嵌入式开发过程
hello world
“PC软件”
独立的嵌入式应用
当程序员开始开发一个基于ARM应用的时候,你可以使用ARM的ADS编写类似于 “HELLO WORLD”的程序,使用ARMulator或者在评估板上来调试,但当你把他 移植到独立的嵌入式应用设备中时,下面这些问题就成为我们首要考虑的:
ARM的开发工具及仿真器介绍.
ARM的开发工具及仿真器介绍。
ARM开发工具综述ARM应用软件的开发工具根据功能的不同,分别有编译软件、汇编软件、链接软件、调试软件、嵌入式实时操作系统、函数库、评估板、JTAG仿真器、在线仿真器等,目前世界上约有四十多家公司提供以上不同类别的产品。
用户选用ARM处理器开发嵌入式系统时,选择合适的开发工具可以加快开发进度,节省开发成本。
因此一套含有编辑软件、编译软件、汇编软件、链接软件、调试软件、工程管理及函数库的集成开发环境(IDE)一般来说是必不可少的,至于嵌入式实时操作系统、评估板等其他开发工具则可以根据应用软件规模和开发计划选用。
使用集成开发环境开发基于ARM的应用软件,包括编辑、编译、汇编、链接等工作全部在PC机上即可完成,调试工作则需要配合其他的模块或产品方可完成,目前常见的调试方法有以下几种:1、指令集模拟器部分集成开发环境提供了指令集模拟器,可方便用户在PC机上完成一部分简单的调试工作,但是由于指令集模拟器与真实的硬件环境相差很大,因此即使用户使用指令集模拟器调试通过的程序也有可能无法在真实的硬件环境下运行,用户最终必须在硬件平台上完成整个应用的开发。
2、驻留监控软件驻留监控软件(Resident Monitors)是一段运行在目标板上的程序,集成开发环境中的调试软件通过以太网口、并行端口、串行端口等通讯端口与驻留监控软件进行交互,由调试软件发布命令通知驻留监控软件控制程序的执行、读写存储器、读写寄存器、设置断点等。
驻留监控软件是一种比较低廉有效的调试方式,不需要任何其他的硬件调试和仿真设备。
ARM公司的Ange l就是该类软件,大部分嵌入式实时操作系统也是采用该类软件进行调试,不同的是在嵌入式实时操作系统中,驻留监控软件是作为操作系统的一个任务存在的。
驻留监控软件的不便之处在于它对硬件设备的要求比较高,一般在硬件稳定之后才能进行应用软件的开发,同时它占用目标板上的一部分资源,而且不能对程序的全速运行进行完全仿真,所以对一些要求严格的情况不是很适合。
ARM开发套件快速入门
NEUEBD-ARM开发套件快速入门ADS集成开发环境是ARM公司推出的ARM核微控制器集成开发工具,英文全称为ARM Developer Suite,成熟版本为ADS1.2。
ADS1.2支持ARM10之前的所有ARM系列微控制器,支持软件调试及JTAG硬件仿真调试,支持汇编、C、C++源程序,具有编译效率高、系统库功能强等特点,可以在Windows98、Windows XP、Windows2000以及RedHat Linux 上运行。
这里将简单介绍使用ADS1.2建立工程,编译连接设置,调试操作等等。
最后还介绍了基于LPC2103系列ARM7微控制器的工程模板的使用,EASYJTAG-H仿真器的安装与使用。
1.1 ADS 1.2集成开发环境的组成ADS 1.2由6个部分组成,如表1.1所示。
表1.1 ADS 1.2的组成部分名称描述使用方式代码生成工具ARM汇编器ARM的C、C++编译器Thumb的C、C++编译器ARM连接器由CodeWarrior IDE调用集成开发环境CodeWarrior IDE 工程管理,编译连接调试器AXDADW/ADUarmsd仿真调试指令模拟器ARMulator由AXD调用ARM开发包一些底层的例程实用程序(如fromELF)一些实用程序由CodeWarriorIDE调用ARM应用库C、C++函数库等用户程序使用由于用户一般直接操作的是CodeWarrior IDE集成开发环境和AXD调试器,所以这一章我们只介绍这两部分软件在Windows下的使用,其它部分的详细说明参考ADS 1.2的在线帮助文档或相关资料。
1.1.1 CodeWarriorIDE简介ADS 1.2使用了CodeWarrior IDE集成开发环境,并集成了ARM汇编器、ARM的C/C++编译器、Thumb的C/C++编译器、ARM连接器,包含工程管理器、代码生成接口、语法敏感(对关键字以不同颜色显示)编辑器、源文件和类浏览器等等。
ARM说明书
作品设计说明书烟台职业学院电子工程系设计者:邸平柱指导教师:王强作品设计摘要:本设计作品主要通过和按键空追,输出到STM32F207为芯片,采用按键模块,实现控制led数码管的显示的控制和led的控制,从而达到我们想要的效果,通过液晶屏显示我们要显示的字。
熟悉了EITP 平台的使用。
了解I2C总线的配置和工作原理、CH452芯片的工作原理并能操作数码管和按键、FSMC总线的配置方式和工作原理和掌握液晶显示器的使用方法。
关键字:STM32F207;液晶显示屏;按键;数码管;LED灯;电机。
作品设计 (2)一、项目背景 (1)概述 (1)2、作品简介 (1)二、方案设计 (1)1、总体设计方案 (1)2、系统模块设计方案 (2)2.1 主控模块: (2)和按键模块: (2)显示模块 (3)步进电机模块 (4)、系统总体结构 (4)三、原理阐述与分析 (5)1、系统主程序分析 (5)2、功能分析 (6)电源模块电路图 (6)2.2 LED电路原理图 (7)继电器模块图 (7)蜂鸣器模块图 (8)数码管电路控制原理图 (8)键盘电路原理 (9)步进电机驱动原理图 (9)2.8 复位电路原理图 (10)四、运行与测试 (10)1.硬件相关设置 (10)2.操作步骤 (10)五、常见故障排除 (11)1、常见故障排除 (11)2、常见故障排除 (11)3、常见故障排除 (11)4、常见故障排除 (11)5、常见故障排除 (11)六、总结 (11)七、参考文献 (12)八、附录 (12)附录一:系统框图 (12)附录二:C8051F020处理器内部结构 (13)一、项目背景概述1.熟悉EITp平台的使用2.了解I2C总线的配置和工作原理3.了解CH452芯片的工作原理并能操作数码管和按键4.掌握LCD液晶的显示原理5.掌握GBK字库操作方法6.掌握SD卡以及文件系统操作方法2、作品简介本作品主要是通过按键控制数码管的显示,LED灯的亮灭和蜂鸣器的工作,通过液晶显示屏显示我们要显示的文字.二、方案设计1、总体设计方案系统主要由主控板、按键、led、蜂鸣器、液晶显示显示五大部分组成。
(潘松第五版)第11章 16位实用CPU创新设计
(1)单字指令。
11.3 KX9016v1指令系统设计
11.3.1 指令格式 (2)双字指令。
11.3 KX9016v1指令系统设计
11.3.2 指令操作码
11.3 KX9016v1指令系统设计
11.3.2 指令操作码
11.3 KX9016v1指令系统设计
11.3.3 软件程序设计实例
第11章
16位实用CPU创新设计
11.1 KX9016的结构与特色
11.2 KX9016基本硬件系统设计
11.2.1 单步节拍发生模块
11.2 KX9016基本硬件系统设计
11.2.2 运算器
11.2.2 运算器
11.2 KX9016基本硬件系统设计
11.2.3 比较器
11.2.3 比较器
11.5.3 KX9016v1的硬件系统优化 (1)软件方案。 算法优化 (2)硬件指令替代软件程序的S2H方案。 (3)调用专用乘法器硬件模块。
实验与设计
11-1. 16位CPU验证性设计综合实验 11-2. 新指令设计及程序测试实验
实验与设计
11-2. 新指令设计及程序测试实验
11-3. 16位CPU的优化设计与创新
11-4. CPU创新设计竞赛
实验与设计
11-2. 新指令设计及程序测试实验
11.2.4 基本寄存器与寄存器阵列组 1.基本寄存器
11.2 KX9016基本硬件11.2 KX9016基本硬件系统设计
11.2.4 基本寄存器与寄存器阵列组 2.寄存器阵列
11.2 KX9016基本硬件系统设计
11.2.4 基本寄存器与寄存器阵列组 2.寄存器阵列
11.4 KX9016的时序仿真与硬件测试
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
❖ 11.1 ARM映像文件 ARM中各种源文件(包括汇编程序、C语言 程序以及C++程序)经过ARM编译器编译后 生成ELF格式的目标文件。这些目标文件 和相应的C/C++运行时库经过ARM连接器 处理后,生成ELF格式的映像文件(image)。 这种ELF格式的映像文件可以被写入嵌入 设备的ROM中。 本节介绍这种E第L11F章A格RM连式接器的映像文件的结构。1
只读的代码段。
只读的数据段。
可读写的代码段。
第11章ARM连接器
4
其他已经初始化的数据段。
11.2 ARM连接器介绍
❖ ARM开发包中包含了连接器armlink,它将编 译得到的ELF格式的目标文件以及相关的 C/C++运行时库进行连接,生成相应的结果 文件。具体来说,armlink可以完成以下操作:
删除重复的调试信息段。第11章ARM连接器
6
最小化符号表的大小。
11.3 ARM连接器生成的符号
❖ ARM连接器定义了一些符号,这些符号中都包含字 符$$。ARM连接器在生成映像文件时,用它们来代 表映像文件中各域的起始地址以及存储区域界限、 各输出段的起始地址以及存储区域界限、各输入段 的起始地址以及存储区域界限。比如, Load$$region_name$$Base代表域region_name加 载时的起始地址;image$$region_ name$$Base代 表域region_name运行时的起始地址。
t
限
Image $$ZI$$Base ZI输出段运行时起始地址
Image$$ZI$$Limit ZI输出段运行时存储区域界限
第11章ARM连接器
9
11.3.3 连接器生成的与输入段相关的符号
❖ ARM连接器为映像文件中的每一个输入段生成两个 符号名符称号,如含表义11.4所示。
SectionNam SectionName输入段 e$$Base 运行时起始地址
11.1.1 ARM映像文件的组成
❖本小节介绍ARM映像文件的组成部 分,以及这些组成部分的地址映射 方式。
1. ARM映像文件的组成部分
2. ARM映像文件各组成部分的地 址映射
第11章ARM连接器
2
11.1.2 ARM映像文件的入口点
❖1. ARM映像文件中的两类入口点 ❖2. 定义初始入口点 ❖3. 普通入口点的用法
2. 删除重复的代码段
3. 删除未使用的段
4. 生成小代码段(veneer)
第11章ARM连接器
11
11.5 运行时库的使用
❖ ARM连接器使用C/C++运行时库的基本步骤 如下:
ARM连接器根据一定的规则确定需要使用哪些 C/C++运行时库。具体的规则在11.5.1小节中介 绍。
从各搜索路径中查找相应的C/C++运行时库。参 见11.5.2小节中介绍。
解析输入的目标文件之间的符号引用关系。
根据输入目标文件对C/C++函数的调用关系,从C/C++运行时库中提 取相应模块。
将个输入段排序,组成相应的输出段。 删除重复的调试信息段。
根据用户指定的分组和定位信息,建立映像文件的地址映射关系。
重定位需要重定位的值。
生成可执行的映像文件。件时执行下面的操 作。
使用了地址映射配置文件(sImcaagtet$t$ReOr$文$Lim件i )R,O输限出表段1运1行.时3存中储区域界 所列的符号没有意义,如果应用程序使用了这些符
号将可能得到错误的结果,Im这ag$e$时RW$应$Ba该se 使RW用输出上段运一行时小起始节地址
中介绍的与域相关的符号。
Image$$RW$$Limi RW输出段运行时存储区域界
连接编译后得到的目标文件和相应的C/C++运行 时库,生成可执行的映像文件。
将一些目标文件进行连接,生成一个新的目标文 件,供将来进一步连接时使用,这成为部分连接。
指定代码和数据在内存中的位置。 生成被连接文件的第调11章试ARM信连接息器 和相互间的引用信息。5
11.2 ARM连接器介绍
❖ Armlink在进行完全连接生成可执行的映像文件时执行下面 的操作。
❖ 这些符号可以被汇编程序引用,用于地址重定位。 这些符号可以被C程序作为外部符号引用。
❖ 所有这些符号,只有第在11章其ARM被连接应器 用程序引用时,ARM7
11.3.1 连接器生成的与域相关的符号
❖ 连接器生成的与域相关的符号如表11.1所示。 各符号的命名规则是:如果使用了地址映射
配置文件(scatter文件),该文件规定了映像文 件中各域的名称;如果未使用地址映射配置
选择合适种类的C/C++运行时库。适应于不同的 编译选项和连接选项,各C/C++运行时库具有不 同的种类。参见11.5.3小节中介绍。
重复扫描各C/C++第运11章行ARM时连接库器 ,解析各符号。参见12
文件(scatter文件),连接器按照下面的规则确 定各符号中的region_name:
对于只读的域,使用名称ER_RO。
对于可读写的域,使用名称ER_RW。
对于使用0初始化的域,使用名称ER_ZI。
第11章ARM连接器
8
11.3.2 连接器生成的与符号输名称出段相含关义 的符号
❖ 如果未使用地址映射配置文Im件age (scatter文RO输件出段),运行连时起接始地址 $$RO$$Base 器生成的与输出段相关的符号如 表11.3所示;如果
第11章ARM连接器
3
11.1.3 输入段的排序规则
❖ 通常情况下,一个输出段中各输入段的排列顺序是 由下面几个因素决定的。用户也可以通过连接选项first和-last来改变这些规则。
输入段的属性。
输入段的名称。
各输入段在连接命令行的输入段列表中的排列顺序。
❖ 按照输入段的属性,其排列顺序如下所示:
SectionNam SectionName输入段 e $$Limit 运行时存储区域 界限
第11章ARM连接器
10
11.4 连接器的优化功能
❖ ARM连接器的优化功能主要包括删除映像文 件中重复的部分以及插入小代码段实现ARM 状态到Thumb状态的转换以及长距离跳转。 具体介绍如下。
1. 删除重复的调试信息段