结构化网格和非结构化网格
tecplot 数据文件格式
tecplot 数据文件格式引言概述:Tecplot数据文件格式是一种常用的科学数据可视化文件格式。
它被广泛应用于各个领域的科学研究,包括流体力学、天气预报、地质学等。
本文将详细介绍Tecplot数据文件格式的特点、结构以及常见的数据类型。
一、Tecplot数据文件格式的特点1.1 可读性强:Tecplot数据文件采用文本格式存储数据,易于人们阅读和理解。
这种特点使得数据文件的交流和共享变得更加方便。
1.2 灵活性高:Tecplot数据文件支持多种数据类型的存储,包括网格数据、场数据、曲线数据等。
用户可以根据需求选择合适的数据类型进行存储和处理。
1.3 大数据处理能力:Tecplot数据文件格式适用于大规模数据的处理和可视化。
它可以高效地处理包含数百万个数据点的大型数据集,满足科学研究中对大数据处理的需求。
二、Tecplot数据文件格式的结构2.1 文件头部分:Tecplot数据文件的头部包含了文件的基本信息,如文件版本、标题、变量名等。
这些信息对于数据的解释和使用具有重要意义。
2.2 数据描述部分:数据描述部分定义了数据的结构和布局,包括网格的拓扑结构、坐标信息、变量类型等。
这些信息对于数据的可视化和分析起着关键作用。
2.3 数据值部分:数据值部分存储了实际的数据数值。
根据数据类型的不同,数据可以以二维数组、三维数组或一维数组的形式进行存储。
三、常见的数据类型3.1 网格数据:Tecplot数据文件可以存储各种类型的网格数据,包括结构化网格和非结构化网格。
结构化网格由规则的网格单元组成,而非结构化网格则由不规则的网格单元组成。
3.2 场数据:场数据是指在网格上定义的物理量,如速度、温度等。
Tecplot数据文件可以方便地存储和处理各种类型的场数据。
3.3 曲线数据:曲线数据是指在二维坐标系中表示的曲线。
Tecplot数据文件可以存储多个曲线,并支持曲线的可视化和分析。
四、Tecplot数据文件的应用领域4.1 流体力学:Tecplot数据文件在流体力学领域中得到了广泛的应用。
gambit网格类型

gambit网格划分基本类型:(一)Mesh Face :面划分Element :Quad:四边形网格Tri:三角形网格Quad/Tri:四边形和三角形网格混合Type :1、map:建立规则的四边形结构性网格2、submap:将不规则的区域划分为几个规则的区域3、pave:非结构性网格4、Tri Primitive:将一个三角形区域划分为三个四边形区域,并同时划分为四边形网格5、Wedge Primitive:将一个楔形的尖端划分为三角形网格,沿着楔形向外辐射,划分为四边形网格(二)Mesh Volume:体划分Element :Hex:六面体网格Hex/Wedge:以六面体为主,在适当的位置包括楔形网格Tet/Hybrid:以四面体为主,在适当的位置上包括六面体、锥形和楔形网格Type :1、map:建立规则的结构化六面体网格2、submap:将不可结构化划分的体积进行分割,再建立map网格3、tet primitive:将四面体分成多个六面体,再对各区域建立map网格4、cooper:通过源面对整个体进行网格样式的扫描,适用于逻辑圆柱体5、stairstep:建立规则六面体网格和相应的微小体积来近似原来的几何体形状,椭圆体。
6、tgrid:将网格指定为四面体元素,但是在适当处可能包括六面体、金字塔形和楔形网格划分方法:(一)MESH FACE FORM1、Map Scheme:4*End+N*Side(1)Periodic(周期性) map Scheme: N*Side,针对圆柱面(2)Face(面)Mapple操作方法:(1)打开“Face Vertex form”对话框,选择用圆圈标注的点,将其修改为“S”类型;然后,打开“Mesh Face Form”对话框,划分网格。
或者(2)在“Mesh Face Form”对话框中,直接将schemme(框架)修改为“Map”。
4*End+L*Side+M*End+Corner+N*2*End+Reverse2、Submap:()()修改方法同2:“E ”改成“S ”。
tecplot 数据文件格式
tecplot 数据文件格式引言概述:Tecplot是一种流体动力学和计算流体力学领域广泛使用的可视化软件。
在使用Tecplot进行数据可视化时,了解其数据文件格式是非常重要的。
本文将详细介绍Tecplot数据文件格式的相关内容,包括文件结构、数据类型和数据存储方式等。
正文内容:1. 文件结构1.1 文件头部:Tecplot数据文件以文件头部开始,其中包含了文件的元数据信息,如文件版本、数据集名称、变量名称等。
1.2 数据块:数据块是Tecplot文件中存储实际数据的部分,可以包含多个数据集。
每个数据集都有自己的描述信息和数据值。
2. 数据类型2.1 标量数据:Tecplot可以存储标量数据,如温度、压力等。
标量数据以单个数值的形式存储。
2.2 矢量数据:Tecplot还支持矢量数据的存储,如速度、位移等。
矢量数据由多个分量组成,每个分量都以单个数值的形式存储。
2.3 网格数据:Tecplot可以存储网格数据,包括结构化网格和非结构化网格。
结构化网格以规则的坐标点集表示,而非结构化网格则以节点和连接信息表示。
3. 数据存储方式3.1 顺序存储:Tecplot数据文件可以按照数据点的顺序进行存储。
这种存储方式适用于结构化网格,可以通过坐标点的排列顺序来确定数据点的位置。
3.2 节点存储:对于非结构化网格,Tecplot数据文件采用节点存储方式。
每个节点都有自己的坐标和连接信息,通过连接信息可以确定数据点的位置。
3.3 单元存储:Tecplot还支持以单元为单位进行数据存储。
每个单元都有自己的节点和连接信息,通过连接信息可以确定数据点的位置。
4. 数据文件格式的扩展性4.1 用户自定义数据:Tecplot允许用户在数据文件中添加自定义的数据。
用户可以根据自己的需求定义新的变量,并将其添加到数据文件中。
4.2 数据文件的互操作性:Tecplot数据文件可以与其他流体动力学和计算流体力学软件进行互操作。
(完整)结构化网格和非结构化网格特点
关于网格的经典文献你可以参看thomphson的Numecrial grid generation那本书,讲的有pde和参数化代数方法.书后附有算例和代码.NURBS参数化曲线和曲面在自由曲线和曲面的cad造型广泛应用,也见到国内外的文献提到用这种方法生成网格,国内可能还没用这种方法来生成网格的实例.如果网格生成算法感兴趣,可以看看。
关于结构和非结构网格,各有应用场合。
个人比较喜欢结构网格。
通过观察IDEAS中结构网格生成的步骤及要求,我觉得对于复杂的几何体,生成结构网格也是可以的,前提是采用适当的partition方法,将几何体分解成规则的基本几何体.而分解几何体是几何建模的任务。
个人感觉:生成网格的软件名目繁多,但是网格生成基本原理和算法可以归成下列所述的类别。
主要差别可能在于辅助的几何建模方法不同。
网格生成应当辅以几何建模,只有与几何建模结合,才可以对复杂几何体生成高质量的网格。
网格生成的另外一个要素就是物体的参数化表示技术,当采用适当的参数化表示实体表面时,同样的网格生成技术有时候可以得到非常好的网格.NURBS是我所知道的CDA/CAM中应用较为广泛的构造复杂曲面的参数化表示技术。
不知道哪位朋友可以提供一些关于网格生成基本算法的源代码。
对于连续的物理系统的数学描述,如航天飞机周围的空气的流动,水坝的应力集中等等,通常是用偏微分方程来完成的。
为了在计算机上实现对这些物理系统的行为或状态的模拟,连续的方程必须离散化,在方程的求解域上(时间和空间)仅仅需要有限个点,通过计算这些点上的未知变量既而得到整个区域上的物理量的分布.有限差分,有限体积和有限元等数值方法都是通过这种方法来实现的.这些数值方法的非常重要的一个部分就是实现对求解区域的网格剖分。
网格剖分技术已经有几十年的发展历史了。
到目前为止,结构化网格技术发展得相对比较成熟,而非结构化网格技术由于起步较晚,实现比较困难等方面的原因,现在正在处于逐渐走向成熟的阶段。
结构化网格和非结构化网格

结构化网格和非结构化网格1.什么是结构化网格和非结构化网格1.1结构化网格从严格意义上讲,结构化网格是指网格区域内所有的内部点都具有相同的毗邻单元。
它可以很容易地实现区域的边界拟合,适于流体和表面应力集中等方面的计算。
它的主要优点是:网格生成的速度快。
网格生成的质量好。
数据结构简单。
对曲面或空间的拟合大多数采用参数化或样条插值的方法得到,区域光滑,与实际的模型更容易接近。
它的最典型的缺点是适用的范围比较窄,只适用于形状规则的图形。
尤其随着近儿年的计算机和数值方法的快速发展,人们对求解区域的儿何形状的复杂性的要求越来越高,在这种情况下,结构化网格生成技术就显得力不从心了。
1.2非结构化网格同结构化网格的定义相对应,非结构化网格是指网格区域内的内部点不具有相同的毗邻单元。
即与网格剖分区域内的不同内点相连的网格数H不同。
从定义上可以看出,结构化网格和非结构化网格有相互重叠的部分,即非结构化网格中可能会包含结构化网格的部分。
2.如果一个儿何造型中既有结构化网格,也有非结构化网格,分块完成的,分别生成网格后,也可以直接就调入fluent中计算。
3.在fluent中,对同一个儿何造型,如果既可以生成结构化网格,也可生成非结构化网格,当然前者要比后者的生成复杂的多,那么应该选择哪种网格,两者计算结果是否相同,哪个的计算结果更好些呢,一般来说,结构网格的计算结果比非结构网格更容易收敛,也更准确。
但后者容易做。
影响精度主要是网格质量,和你是用那种网格形式关系并不是很大,如果结构话网格的质量很差,结果同样不可靠,相对而言,结构化网格更有利于计算机存储数据和加快讣算速度。
结构化网格据说讣算速度快一些,但是网格划分需要技巧和耐心。
非结构化网格容易生成,但相对来说速度要差一些。
4.在gambit中,只有map和submap生成的是结构化网格,其余均为非结构化网格。
采用分块网格划分的时候,在两个相邻块之间设置了connected,但是这两个块我要用不同尺寸的网格来划分。
starccm包面原理 -回复
starccm包面原理-回复"starccm包面原理"Star-CCM+(Computer Aided Engineering for Computational Fluid Dynamics)是一种流体力学(CFD)软件,它适用于模拟和分析各种流体力学问题。
其中一个重要的功能是其能够进行包面操作,这是一个用于处理网格的关键步骤。
下面将一步一步地解释Star-CCM+中包面的原理。
首先,让我们了解一下CFD模拟中网格的基本概念。
网格是一个由小的几何体单元组成的离散网格结构。
每个单元代表流体领域中的一个小区域,该区域的性质用数值表示。
在CFD模拟中,网格是模拟流体行为的基础。
不同类型的问题需要不同类型的网格,因此在开始模拟之前,必须正确创建和准备合适的网格。
网格可以分为结构化和非结构化两种类型。
结构化网格由规则的、有序的几何体单元组成,例如矩形或立方体。
这种网格通常适用于简单几何形状和规则流动。
非结构化网格则由不规则的、无序的几何体单元组成,例如三角形或四面体。
这种类型的网格对于复杂几何形状和非规则流动更为适用。
在Star-CCM+中,包面操作是指根据特定准则和算法将非结构化网格转换为结构化网格的过程。
包面操作的目的是改善网格的质量和结构,并提高CFD模拟的准确性和效率。
以下是Star-CCM+中包面操作的详细步骤:第一步是几何表面的网格划分。
在这一步中,几何表面被分割为多个小的面片。
这些面片称为几何网格或面网格。
面网格的密度和形状对整个包面操作的效果有重要影响。
面网格的划分可以手动设置,也可以由Star-CCM+自动完成。
接下来,通过在每个面片上创建一个中心点,将面网格转换为体网格。
这个中心点位于面片的中心,并且成为后续步骤中生成结构化网格的基础。
在生成体网格后,网格质量的评估和修复开始进行。
这一步包括检查和调整网格中单元的属性,例如倾斜度、长宽比和形状。
这样可以确保网格在数值模拟中的可靠性和准确性。
采用结构化网格还是非结构化网格与需要求解的
结构与非结构网格
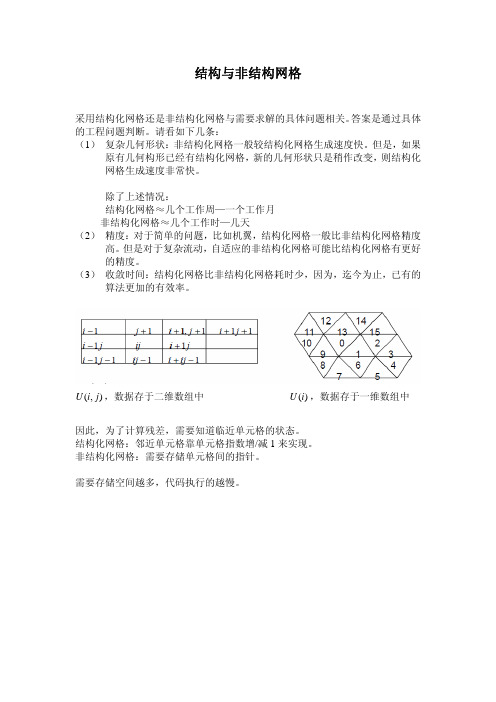
采用结构化网格还是非结构化网格与需要求解的具体问题相关。
答案是通过具体的工程问题判断。
请看如下几条:
(1) 复杂几何形状:非结构化网格一般较结构化网格生成速度快。
但是,如果原有几何构形已经有结构化网格,新的几何形状只是稍作改变,则结构化网格生成速度非常快。
除了上述情况:
结构化网格≈几个工作周—一个工作月
非结构化网格≈几个工作时—几天
(2) 精度:对于简单的问题,比如机翼,结构化网格一般比非结构化网格精度高。
但是对于复杂流动,自适应的非结构化网格可能比结构化网格有更好的精度。
(3) 收敛时间:结构化网格比非结构化网格耗时少,因为,迄今为止,已有的算法更加的有效率。
U,数据存于二维数组中)(i
U,数据存于一维数组中i
)
,(j
因此,为了计算残差,需要知道临近单元格的状态。
结构化网格:邻近单元格靠单元格指数增/减1来实现。
非结构化网格:需要存储单元格间的指针。
需要存储空间越多,代码执行的越慢。
数值传热学 第六章答案 (2)

数值传热学第六章答案简介本文档将为读者提供《数值传热学》第六章的答案。
第六章主要涉及热对流传热的数值计算方法,包括网格划分、边界条件、离散方法等内容。
通过本文档,读者将了解如何使用数值方法解决热对流传热问题,并学会应用这些方法进行实际计算。
问题回答1. 简述热对流传热的数值计算方法。
热对流传热的数值计算方法主要包括三个步骤:网格划分、边界条件设置和离散方法。
网格划分是指将传热区域划分为若干个离散的小单元,每个单元内部温度变化均匀。
常见的网格划分方法有结构化网格和非结构化网格。
结构化网格适用于简单几何形状,易于处理;非结构化网格则适用于复杂几何形状。
边界条件设置是指给定物体表面的边界条件,如温度或热流密度。
边界条件的设置需要根据实际问题来确定,可以通过实验或经验公式来获取。
离散方法是指将传热控制方程进行离散化,通常使用有限差分法或有限元法。
有限差分法将控制方程离散化为代数方程组,而有限元法则通过近似方法将方程离散化。
2. 什么是结构化网格和非结构化网格?它们在热对流传热计算中有何不同?结构化网格是指由规则排列的矩形或立方体单元组成的网格。
在结构化网格中,每个单元与其相邻单元之间的联系都是固定的,因此易于处理。
结构化网格适用于简单几何形状,如长方体或圆柱体。
非结构化网格是指由不规则形状的三角形、四边形或多边形组成的网格。
在非结构化网格中,每个单元与其相邻单元之间的联系可能是不确定的,需要使用邻接表来表示网格拓扑关系。
非结构化网格适用于复杂几何形状,如复杂流体流动中的腔体或障碍物。
在热对流传热计算中,结构化网格和非结构化网格的主要区别在于网格的配置方式和计算复杂度。
结构化网格由正交单元组成,计算稳定性较高,但对于复杂几何形状的处理能力较差。
非结构化网格可以灵活地适应复杂几何形状,但计算复杂度较高。
3. 如何设置边界条件?边界条件的设置是热对流传热计算中非常重要的一步,它决定了计算结果的准确性和可靠性。
结构及非结构化网格

CFD网格的分类,如果按照构成形式分,可以分为结构化和非结构化结构化:只能有六面体一种网格单元,六面体顾名思义,也就是有六个面,但这里要区分一下六面体和长方体。
长方体(也就是所有边都是两两正交的六面体)是最理想完美的六面体网格。
但如果边边不是正交,一般就说网格单元有扭曲(skewed). 但绝大多数情况下,是不可能得到完全没有扭曲的六面体网格的。
一般用skewness来评估网格的质量,sknewness=V/(a*b*c). 这里V是网格的体积,a,b,c是六面体长,宽和斜边。
sknewness越接近1,网格质量就越好。
很明显对于长方体,sknewness=1. 那些扭曲很厉害的网格,sknewness很小。
一般说如果所有网格sknewness>0.1也就可以了。
结构化网格是有分区的。
简单说就是每一个六面体单元是有它的坐标的,这些坐标用,分区号码(B),I,J,K四个数字代表的。
区和区之间有数据交换。
比如一个单元,它的属性是B=1, I=2,J=3,K=4。
其实整个结构化单元的概念就是CFD计算从物理空间到计算空间mapping的概念。
I,J,K可以认为是空间x,y,z在结构化网格结构中的变量。
非机构化:可以是多种形状,四面体(也就三角的形状),六面体,棱形。
对任何网格,都是希望网格单元越规则越好,比如六面体希望是长方形,对于四面体,高质量的四面体网格就是正四面体。
sknewness的概念这里同样适用,sknewness越小,网格形状相比正方形或者正四面体就越扭曲。
越接近1就越好。
很明显非结构化网格也可以是六面体,但非结构化六面体网格没有什么B,IJK的概念,他们就是充满整个空间。
对于复杂形状,结构化网格比较难以生成。
主要是生成时候要建立拓扑,拓扑是个外来词,英语是topology,所以不要试图从字面上来理解它的意思。
其实拓扑就是指一种有点和线组成的结构。
工人建房子,需要先搭房粱,立房柱子,然后再砌砖头。
voxel存储格式三维数组
voxel存储格式三维数组Voxel是一种三维数据的存储格式,与像素类似,它表示三维空间中的一个体素(voxel),即三维空间中的一个立方体。
每个体素都有一个值,该值表示该立方体中存储的数据。
一个典型的三维数组可以存储在二进制文件中,其中每个值都表示一个体素的数值。
每个体素的位置由其在数组中的索引确定。
对于一个三维数组,其索引从0开始,因此一个具有x、y 和z维度的数组的索引可以表示为(x, y, z)。
在某些情况下,三维数组可能以其他格式存储,例如以CSV 文件的形式存储。
在这种情况下,每个值都存储在一个逗号分隔的值中,每个值的位置由其在文件中的行和列号确定。
无论使用哪种格式,三维数组都可以用于表示三维空间中的数据,例如医学图像数据、地质数据或建筑模型数据等。
除了二进制文件和CSV文件,三维数组还可以以其他格式存储。
例如,它们可以使用结构化网格(structured grid)或非结构化网格(unstructured grid)来存储。
结构化网格是一种将三维空间划分为规则的网格的格式。
在这种格式中,每个体素的位置由其在网格中的坐标确定。
结构化网格通常用于表示具有平滑表面的三维数据,例如地形或海洋表面。
非结构化网格则是一种不遵循规则网格分布的格式。
在这种格式中,每个体素的位置由其在三维数组中的索引确定,而不是由其在网格中的坐标确定。
非结构化网格通常用于表示具有复杂形状的三维数据,例如建筑模型或工业部件。
此外,三维数组还可以以其他形式呈现,例如在计算机图形中使用的纹理映射(texture mapping)技术。
在这种技术中,每个体素的值可以映射到一个纹理图像上,从而将三维数据呈现为二维图像。
这种技术通常用于可视化三维数据,例如气象数据或地质数据。
FLUENT知识点解析
FLUENT知识点解析1.网格生成:网格是FLUENT模拟的基础,网格质量直接影响数值模拟的准确性和收敛性。
FLUENT支持多种网格生成方法,包括结构化网格和非结构化网格。
结构化网格适用于几何形状简单、布尔操作较少的问题,而非结构化网格适用于几何形状复杂、布尔操作较多的问题。
2. 边界条件:在模拟中,需要为流域的边界定义适当的边界条件。
常见的边界条件包括:壁面(No Slip)边界条件、入流/出流条件、对称边界条件和压力边界条件等。
通过合理设定边界条件,可以更加准确地模拟流体流动过程。
3.流体模型:FLUENT提供了多种流体模型,包括不可压缩流动、可压缩流动、多相流动和湍流模型等。
选择合适的流体模型可以更好地描述流体的物理特性,并提高模拟结果的准确性。
4.数值方法:FLUENT使用有限体积法对流体力学方程进行离散,同时还要考虑边界条件和初始条件。
对流项通常使用空间二阶精度的格式,而扩散项则根据流动特性来选择适当的格式。
通过调整数值格式和网格精度,可以提高模拟的精度和收敛性。
5. 离散格式:FLUENT中常用的离散格式包括:顺序隐式离散(SIMPLE算法)、压力修正方案(PISO算法)和压力-速度耦合(PISO-Coupled算法)。
不同的离散格式适用于不同的物理模型和流动特性。
6.迭代收敛:在模拟过程中,通过迭代来逼近方程组的解,使得模拟结果收敛于物理解。
FLUENT提供了多种收敛判据,如压力、速度、残差和修正量等,可以通过调整迭代参数来加速收敛。
7.后处理:模拟结果完成后,需要对结果进行后处理,以获取感兴趣的数据。
FLUENT提供了多种后处理工具,包括可视化、数据导出和报告生成等,可以方便地分析和展示模拟结果。
8.其他功能:除了上述主要知识点外,FLUENT还具有其他一些功能,如动网格技术、化学反应模型、传热传质模型和多物理场模拟等。
这些功能可以进一步扩展FLUENT的应用范围,并提供更加精确的模拟结果。
船舶水动力性能的CFD模拟与优化设计
船舶水动力性能的CFD模拟与优化设计船舶水动力性能是研究船舶在水中运动的重要领域之一。
为了提高船舶的航行速度、操纵性和能效,工程师们利用计算流体力学(CFD)模拟技术开展了大量的研究与优化设计工作。
本文将介绍船舶水动力性能的CFD模拟与优化设计方法,并探讨其在船舶工程领域中的应用。
1. 模型构建船舶的水动力性能主要包括波浪阻力、湍流阻力、粘性阻力和激波阻力等。
在进行CFD模拟前,首先需要构建船舶的几何模型。
根据不同的船舶类型和设计需求,可以选择不同的建模方法,如传统的离散几何模型或参数化设计模型。
通过建模软件,将船舶的几何形状转化为计算机可识别的几何信息,为后续的模拟分析做准备。
2. 网格划分在进行CFD模拟时,网格划分是非常重要的步骤。
网格的划分质量将直接影响模拟结果的准确性和计算效率。
通常情况下,船舶的复杂几何形状需要采用结构化或非结构化网格划分方法。
结构化网格适用于简单几何形状,而非结构化网格则适用于复杂几何形状。
通过优化网格划分,可以更准确地模拟和预测船舶在水中的运动行为。
3. 流场模拟在进行CFD模拟时,需要建立适当的物理模型和数值模型。
根据船舶运动的特性,可以选择合适的流体方程和边界条件。
在求解过程中,采用合适的数值方法和稳定性算法,以保证模拟结果的准确性和稳定性。
通过CFD模拟可以获取船舶在不同操作条件和流场环境下的运动特性,如阻力、流线和压力分布等。
4. 优化设计基于CFD模拟结果,可以进行船舶水动力性能的优化设计。
通过调整船体形状、推进系统和尾流控制等参数,可以改善船舶的流线型和水动力性能。
优化设计的目标往往是降低阻力、提高速度和操纵性,以及减少燃油消耗和排放。
通过多次CFD模拟和参数优化,可以找到最优设计方案,从而提高船舶的性能和效益。
5. 应用实例船舶水动力性能的CFD模拟与优化设计已经在实际工程中得到广泛应用。
例如,在船舶船型设计阶段,工程师们利用CFD模拟技术对不同船型进行了性能比较和优化设计;在推进系统设计阶段,CFD模拟可以帮助确定最佳螺旋桨参数和布局方案;在船舶舵系统设计阶段,CFD模拟可以预测船舶的转向性能和操纵稳定性。
流体力学中的计算流体力学方法

流体力学中的计算流体力学方法在流体力学领域,计算流体力学(Computational Fluid Dynamics,简称CFD)是一种重要的数值模拟方法。
它结合了数学、物理和计算机科学,用于分析和预测气体和液体在流动过程中的行为。
本文将介绍流体力学中常用的计算流体力学方法,包括数值离散化、网格生成和求解算法。
1. 数值离散化数值离散化是计算流体力学的基础,其目的是将连续域中的流动问题转化为离散化的数学模型。
最常用的数值离散化方法包括有限差分法(Finite Difference Method,简称FDM)、有限体积法(Finite Volume Method,简称FVM)和有限元法(Finite Element Method,简称FEM)。
在有限差分法中,流动域被划分为离散的网格单元,运用差分近似替代微分操作,对控制方程进行离散化求解。
有限体积法则将流动域划分为有限体积,对控制方程进行积分求解。
而有限元法则将流动域划分为有限元,通过建立形函数和权函数的关系对控制方程进行近似求解。
2. 网格生成网格生成是计算流体力学中至关重要的一步,它决定了数值模拟的精度和计算效率。
网格生成的目标是将流动域离散成适合数值计算的网格单元。
常见的网格类型包括结构化网格和非结构化网格。
在结构化网格中,每个网格单元的几何形状和大小都相同,可以使用简单的坐标表示。
结构化网格具有计算精度高、数值稳定性好的优点,适用于简单流动情况。
非结构化网格则具有处理复杂几何形状的能力,适用于复杂流动情况。
3. 求解算法求解算法用于计算流体力学中的控制方程,其中包括连续方程和动量方程。
常用的求解算法包括显式方法和隐式方法,以及基于时间步进的迭代求解方法。
在显式方法中,时间步长通过稳定性条件限制,将未知量的时间导数用已知量的空间导数逼近。
隐式方法则以更大的时间步长进行迭代,通过求解非线性代数方程组来得到近似解。
基于时间步进的迭代求解方法则将隐式方法与迭代求解方法相结合,提高了求解的效率和稳定性。
2-3结构化网格和非结构化网格

结构化网格和非结构网格并不是以网格的形状来划分的
官方解释:网格区域内所有的内部点是否都具有相同的毗邻单元
本人解释:某个单元的计算结果是否决定了相邻单元的计算结果。
但是在ICEM中,结构化网格的形状只有四边形和六面体,而非结 构化网格则包含了以上所有的单元形状。 可以得出结论: 1:结构化网格一定是四边形和六面体,但是四边形和六面体不一定是结构化网格
2:三角形、四面体、棱柱一定是非结构化网格
3:四边形、六面体既可能是非结构化网格,也可能是结构化网格。
网格的划分操作
结构网格
非结构网格
混合网格,复杂网格
请
怎
听 后
么面
办
章 节
详
细
讲
解
结构化网格和非结构化网格
网格类型
• 二维网格类型: 四边形、三角形
网格类型
• 三维网格:四面体、六面体、三棱柱、金字塔等
结构网格和非结构网格
ICEM中结构网格和非结构网格究竟是什么? 四边形和六面体就是结构网格? 不一定 三角形、四面体、棱柱就一定是非结构网格吗? 是的
why? resons?
结构与非结构网格之间的转换及应用

Applications Of Transformation Of Structured ToUnstructured MeshesLiu Jing1, 2,Zhang Min1,John C. Chai2,Xu Bin11School of Power Eng.,Nanjing University of Science & Technology,Nanjing (210094)2School of Mechanical and Aero spacing Eng.,Nanyang Tech. University,Singapore (639798)E-mail:mz2455@AbstractThe transformation of structured meshes to unstructured meshes is a branch of mesh generation technology. We can obtain the advantages of both grids that structure grids have the characteristics of convergence quickly and unstructured grids have the characteristics of matching sophisticated calculating domains well from this conversion. Meanwhile, it is expanding the widespread useful application of unstructured mesh codes. This paper gave the models of the transformations of the orthogonal meshes and body-fitted meshes. And, the heat conduction equation was solved using the based cell finite volume method and the secondary order accuracy. Finally, a couple of three dimension examples of heat transfer that included different geometries and boundary conditions were given. Therefore, the procedure was validated exactly and actually.Keywords:structured grids/meshes,unstructured grids/meshes,heat conduction1.IntroductionThe first step of numerical simulation is mesh generation that is cutting the continuous computational space into subdomains and identifying each node. The accuracy and efficiency of engineering numerical simulation mainly defend on the meshes and algorisms. In generally, all kind of mesh has its advantages and disadvantages; also the every numerical method has its constraints. Therefore, successful numerical simulation can only be done on the conditions that meshes and algorisms match perfectly [1].Two commonly kinds of mesh are structured and unstructured mesh/grid. The former characteristic is that the relationship between nodes is fixed and implied in the mesh. Thus, no special action is needed to ensure the relationship. But there don’t exists the property in unstructured mesh, so we must store the information about nodes such as volume nodes number, interfaces nodes number, and neighbor volume number[2-4] .It is stubborn to compare structured grid and unstructured grid exactly, besides considering the numerical algorism. In the brief, structured mesh has the good feature, simplex in generating, converging fast, and steady etc, while unstructured mesh can be more applicable for irregular domain, decomposing and encrypting in whole or part domain and used widely in later computation[4] . The paper takes advantage of two kinds of mesh to get fine results by the transformation between them.2.Transformation Between Both MeshesRegular structured mesh in orthogonal coordination is the oldest, most basic and simplex generation technique, including rectangle mesh of Cartesian coordinates and curve mesh in cylindrical coordinates or spherical coordinates. No detail about this kind of mesh, but the paper based on orthogonal mesh and body-fitted grid.First, we have to get the grid nodes of coordination in three dimensions, and then transform them to unstructured grid nodes number. Finally, numerical simulation will be done based on the unstructured mesh. For the transformation, at first, select cells shape and nodes NCTYPE(I) and NCNODE(J,I), here they are vertex number and coordination value (X(I),Y(J),Z(K)) of cell, respectively. Secondly, get the surface information NFTYPE (I) and NFNODE (J, I) of the cells. Where, the node order conform right hand rule, which is, ensuring the direction of surface normal is outside the cells.At the end, storing all neighbor cells information and their boundary property by KBCC (I).Ultimately, we can obtain the six data files. It is exactly these files comprise surfaces and nodes number for every cell and surface. The key of transformation is rearranging the I/J/K order of structured grid nodes to cell series data structure. Although the program is easy to do, the technique proved to be a handicap. Next part program is given in two dimensions.C**************************************************COME HERE FOR THE NODES OF CELL (cell_node.dat)LM=L2*M2 I0=0 J0=0DO 30 I=1,NCV NCTYPE(I)=8 NCNODE(1,I)=I+I0+J0NCNODE(2,I)=I+1 +I0+J0 NCNODE(3,I)=I+L1+I0+J0 NCNODE(4,I)=I+L2+I0+J0 NCNODE(5,I)=I+I0+J0+LMNCNODE(6,I)=I+1 +I0+J0+LM NCNODE(7,I)=I+L1+I0+J0+LM NCNODE(8,I)=I+L2+I0+J0+LM IF(MOD(I,L3).EQ.0) I0=I0+1IF(MOD(I,L3*M3).EQ.0) J0=J0+L230 CONTINUEC**************************************************The particular examples and their results analysis are provided in following paragraphs.3. Heat Conduction ExamplsProblem 1: We have heat transfer conduction without heat source in cubic region. Geometry and computational grids are showed in figure1, and governing equation is heat conduct equation with constant property in three Cartesian coordinates. The left surface has higher temperature T 2, and the left five ones have lower temperature T 1. Arithmetic formula of governing function and boundary conditions are:0=⎟⎠⎞⎜⎝⎛∂∂∂∂+⎟⎟⎠⎞⎜⎜⎝⎛∂∂∂∂+⎟⎠⎞⎜⎝⎛∂∂∂∂z T k z y T k y x T k x(1.1) 0.1,0.1,0.0,0.121======k T T c b a(1.2)(a) Cubic V olume (b) Orthogonal meshes (c) Body-fitted meshesFigure 1 Geometry and structured/unstructured meshesWe can obtain the exact solution of (1.1) and (1.2) (Kakac and Yener, 1993)[5],[][]∑∑∞=∞=−−−−−=−−=11121sinh )(sinh )sin()sin(])1(1[])1(1[4),(),(m n mn mn m n m mn nb y b z x ac T T T y x T y x ααβλβλθ(1.3)Where,n λa n π=(n = 1, 2,…,i ) =m βcm π (m = 1, 2, …,i )22mn mn βλα+=(1.4)In Figure 2, the results of temperature distributions were from the transformation of orthogonalmeshes to unstructured grids. The same one was from the transformation of body-fitted meshes to unstructured grids in Figure 3. The solid lines stand for the exact solution. The dashed lines represent numerical solution. The numbers of grid are 10*10*10. There are agreements of temperature fields in both meshes.(a) X =0.5 (b) Y =0.2 (c) Z =0.5Figure 2. The temperature field of orthogonal meshes(————Exact Solution - - - - - -Numerical Solution)(a) X =0.5 (b) Y =0.2 (c) Z =0.5Figure 3. The temperature field of body-fitted meshesProblem 2: We have heat transfer conduction within heat source in cubic region. Geometry and computational grids are showed in figure1, and governing equation is heat conduct equation with constant property in three Cartesian coordinates as following. The all surfaces maintain the constant temperature (T 1 =0) same as the first kind of boundary condition. Mathematical formula of governing function and boundary conditions are:=∂∂+∂∂+∂∂222222zT y T x T )sin()sin()(1c z a x b y y k ππ−− (2.1)The exact solution of this problem is [6],)sin()sin()sin(]1()()1[(1π8),,,5,3,1222352c z b y n a x cb n a n kb z y x T n πππ⋅++−=∑∞=L ( (2.2)The results of temperature distributions were from the transformation of body-fitted meshes tounstructured grids in Figure 4. The solid lines stand for the exact solution. The dashed lines represent numerical solution. The numbers of grid are 10*10*10. There are agreements of temperature fields in both meshes. There are the symmetrical temperature distribution basic of the boundary conditions and geometry.(a) X =0.5 (b) Y =0.5 (c) Z =0.5Figure 4. The temperature field of body-fitted meshesProblem 3: We have heat transfer conduction without heat source in cylindrical region. Geometry and computational grids are showed in figure 5a, and governing equation is heat conduct equation with constant property in three cylindrical coordinates as following. The outside surface has higher temperature T 2, and the inside surface has lower temperature T 1. Mathematical formula of governing function and boundary conditions are:0112=⎟⎠⎞⎜⎝⎛∂∂∂∂+⎟⎟⎠⎞⎜⎜⎝⎛∂∂∂∂+⎟⎠⎞⎜⎝⎛∂∂∂∂z T k z T k r r T kr r r ϕϕ(3.1) 0.1,0.8,0.4,0.2,0.12121=====k T T r r r r(3.2)The exact solution of this problem is [7-8],)/ln()/ln()/ln()(122211r r r r T r r T r T r r −=(3.3)In Figure 5, the results of temperature distributions were from the transformation of body-fittedmeshes to unstructured grids. The solid lines stand for the exact solution. The dashed lines represent numerical solution. The numbers of grid are 10*10*10. There are agreements of temperature fields in both meshes. There are the symmetrical temperature distribution basic of the boundary conditions and geometry.(a) Meshes (b)Temperature fields in Z=0.5 (c) The flood picture of temperatureFigure 5. The temperature field of cylindrical coordinates4.Closure RemarkThe produces, which the heat conduction equations were solved, was presente d using the unstructured meshes that were transformed from structured grids. There are two kinds of meshes including orthogonal and body-fitted meshes. We show three examples for evaluating and proving this processor accruable and reasonable. The problem one and two are in the Cantinas coordinate and the problem three is in cylindrical coordinate. All results of numerical simulation were compared with the exact solutions. As a result, there is a perfect agreement between them.References[1] 陶文铨. 计算传热学的近代发展[M] 北京: 科学出版社, 2001.[2] PA TANKAR S V. Computation of Conduction and Duct Flow Heat Transfer [M].USA: Innovative Research Inc, 1991.[3] PA TANKAR S V. Numerical Heat Transfer and Fluid Flow [M]. New York: Hemisphere Publishing, 1981.[4] ZHANG M. Modeling of Radiative Heat Transfer and Diffusion Processes Using Unstructured Grid [D]. USA: Tennessee Technological University; 2000.[5] KAKAC S, YENER Y. Heat Conduction (Third edition) [M]. Taylor & Francis, Publisher, 1993.[6] 马信山. 电磁场基础[M]. 北京: 清华大学出版社, 1995.[7] M. N. 奥齐西克. 热传导[M]. 俞昌铭, 译. 北京: 高等教育出版社, 1984.[8] 南京工学院数学教研组. 数学物理方程和特殊函数[M]. 北京: 人民教育出版社, 1982.。
网格计算基本要求

对计算网格的基本要求网格分为结构化和非结构化两大类,由于结构化网格在计算精度、计算时间等方面存在相对优势,目前在CFD计算中广泛采用的仍是结构型网格。
因此为确保计算结果的正确性及模拟的精度,本课题组要求尽量使用结构化网格,除非在极个别的情况下(如几何结构过于复杂,很难生成结构化网格)才允许使用非结构化网格。
对生成的六面体结构化网格的质量有以下几方面的要求:首先计算网格中不允许存在负体积,这是保障计算网格正确性的基本要求。
网格单元的总体分布应尽量与主流方向保持一致。
有叶片的区域,应采用绕叶片的O型网格来处理边界层内的流动,另外,O 型网格对网格加密很有利。
在所有计算区域的边界处的计算网格线应最大程度的与边界正交,角度最小应大于45°。
计算单元的纵横比不能过大,一般应控制在[1,100]之间,不应高于100。
(Aspect Ratio,[1,∞],越接近于1表明网格质量越高)任意两相邻网格的同一方向上的尺寸比位于[0.5,2]之间。
偏斜度(skewness)应该位于[0.2,1.0]之间。
与同一节点相邻的最大/最小网格单元体积比最好不超过2.0,最大值不能超过8.0。
网格单元最小角度/最大角度。
角度应该处于[25°,155°]之间,不应该超出此范围。
最大/最小边长比。
整个计算区域内所有面上的最大/最小边长比应该小于100。
最大/最小体积比。
在整个计算域中最大计算单元与最小计算单元的体积比应小于10000。
网格的整体质量应该大于0.25。
(quality,[0,1]之间,越接近于1表明网格质量越高)。
所有交界面的两侧网格单元分布应尽量一致,界面两侧相邻单元的面积比最大不超过4。
单个流道两个周期面上网格的周期性应该得到保证。
(对应节点应该被设为周期节点,对应周期边上点分布规律应该相同)。
第三讲AUTODYN基础理论详解

Sphere
Ogive
Hex Bricks / Fragments
Part 向导 – 3D 壳
平板
圆柱
手动建模
使用下面步骤一步 一步生成网格
点 线 面 体
插值 拉伸
输入3D 结构化
ANSYS, ICEM-CFD 强大的3D 六面体网格生成 全面的 CAD接口
CATIA, Pro/Engineer, SDRC I-DEAS, SolidWorks, Unigraphics, ….
Euler 和 ALE Parts 均为结构化 Euler 网格通常都是直线正交的
结构化Parts - 指标空间
AUTODYN中每一个结构化Part 都会定义一个 指标空间, 2D(i,j) 或者 in 3D(i,j,k), 这里 i, j 和 k 是从1 到 Ni, Nj, Nk 的整数
Define
Apply (Part Wizard)
Apply
用材料和初始条件填充parts
Wizard 中每一个part用一种材料填充 Wizard 完成以后可以进行附加的填充
每一个附加填充可以替换前一个填充的材料和 初始条件
如果中心在填充区域的内部Lagrange 单元可以被填充 (没有多物质填充功能)
定义预定义几何体 定义指标空间 填充parts
Geometry
Zoning
Fill
Part 向导– 2D 正方形
Part 向导 – 2D 圆形
Part 向导 – 2D 模型
Ogive Rhombus
Quads
Wedge
Part 向导 – 3D 正方体
Part 向导 – 3D 圆柱
Part 向导 – 3D 模型
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 什么是结构化网格和非结构化网格
1.1结构化网格
从严格意义上讲,结构化网格是指网格区域内所有的内部点都具有相同的毗邻单元。
它可以很容易地实现区域的边界拟合,适于流体和表面应力集中等方面的计算。
它的主要优点是:
网格生成的速度快。
网格生成的质量好。
数据结构简单。
对曲面或空间的拟合大多数采用参数化或样条插值的方法得到,区域光滑,与实际的模型更容易接近。
它的最典型的缺点是适用的范围比较窄,只适用于形状规则的图形。
尤其随着近几年的计算机和数值方法的快速发展,人们对求解区域的几何形状的复杂性的要求越来越高,在这种情况下,结构化网格生成技术就显得力不从心了。
1.2非结构化网格
同结构化网格的定义相对应,非结构化网格是指网格区域内的内部点不具有相同的毗邻单元。
即与网格剖分区域内的不同内点相连的网格数目不同。
从定义上可以看出,结构化网格和非结构化网格有相互重叠的部分,即非结构化网格中可能会包含结构化网格的部分。
2.如果一个几何造型中既有结构化网格,也有非结构化网格,分块完成的,分别生成网格后,也可以直接就调入fluent中计算。
3.在fluent中,对同一个几何造型,如果既可以生成结构化网格,也可生成非结构化网格,当然前者要比后者的生成复杂的多,那么应该选择哪种网格,两者计算结果是否相同,哪个的计算结果更好些呢?
一般来说,结构网格的计算结果比非结构网格更容易收敛,也更准确。
但后者容易做。
影响精度主要是网格质量,和你是用那种网格形式关系并不是很大,如果结构话网格的质量很差,结果同样不可靠,相对而言,结构化网格更有利于计算机存储数据和加快计算速度。
结构化网格据说计算速度快一些,但是网格划分需要技巧和耐心。
非结构化网格容易生成,但相对来说速度要差一些。
4.在gambit中,只有map和submap生成的是结构化网格,其余均为非结构化网格。
采用分块网格划分的时候,在两个相邻块之间设置了connected,但是这两个块我要用不同尺寸的网格来划分。
比如说我用结构化的六面体网格来划分,一遍的尺寸为2,另一边的尺寸为3,这时候公共边界面该怎么处理?如果采用cooper 的格式来划分这个网格,尺寸就是前面所说的,该怎么来做呢?
我用单独的两个块试过,就是在公共边界上采用interface的格式,但是由于与这个公共边界相邻的另一个边界也不得不用interface格式,结果导入fluent 的时候就说can not creat a bound loop,也不清楚这是什么问题。
如果中间面两侧的面网格一致,可以直接在fluent中merge,如果不一致,可以设interface
网格的正交性是指三个方向上的网格边之间互相垂直的程度。
一般而言,三维网格单元中,三个方向上的网格边之间的夹角越接近90度则质量越好。
这一点在规则区域(例如正方形方腔)很容易实现,但对于流动区域比较复杂的问题则非常困难。
但一般情况下,应当保证所有的网格单元内的网格边夹角大于10度,否则网格本身就会引入较大的数值误差。
EquiSize Skew(尺寸扭曲率)和EquiAngle Skew(角度扭曲率)是评判网格质量最主要标准,其值越小,网格质量越高
一般来说,Fluent要求扭曲率3D小于0.85,2D小于0.75。
关于复杂模型和gambit中的实体及虚体
模型比较复杂,是在pro/E中建的模,然后用igs导入gambit,不过这样就产生了很多碎线和碎面并且在一些面交界的地方还存在尖角。
我曾经做成功过把它们统统merge成一个虚面,中间设置了一个可以容忍尖角的参数,也可以划分网格,但把生成的msh文件导入fluent就会出错,这是virtual geometry的原因还是因为尖角的原因?还有,virtual geometry和普通的真实的几何体到底有什么区别?好像最大的区别是virtual geometry不能进行布尔操作,布尔操作(boolean operation)又是什么?使用virtual geometry需要注意哪些问题?virtual geometry是很头疼的问题。
你把它们统统merge成一个虚面
按理说全是虚的也是可以算的。
可能是因为尖角的原因,虚实最大差别:是virtual geometry不能进行布尔操作,boolean operation即是并
对于复杂外形的网格生成,不可避免的会用到virtual geometry,virtual face ,和virtual edge等,
1。
作网格的时候,把所有的面全部合成一个虚面的做法不好,特别是对于复杂外形的网格生成,你最好在模型变化剧烈的地方多分几个面,这样会更有效的控制网格能够在模型表面曲率比较大的地方能够生成规则的结构或者非结构网格。
2对于你输入gambit的时候产生很多碎片的问题,你可以适当的把proe里面的模型精度和它的公差降低,因为gambit的建模工具精度本事就不高。
3。
布尔运算就是对于面与面,体与体的联合,相减等运算。
这个在所有的cad 建模过程中是经常见到的问题。
4。
对于虚体生成的计算网格,和实体生成的计算网格,在计算的时候没有区别,关键是看你网格生成的质量如何,与实体虚体无关。
我在作复杂模型计算的时候,大部分都是用的虚体,特别是从其他的建模软件里面导进来的复杂模型,基本上不能够生成实体。
至于计算的效果如何,那是你对于fluent的设置问题和网格的质量问题,与模型无关。
可以用gambit里面的check功能检查一下你的网格质量,看看质量怎么样
实体、实面与虚体、虚面的区别
在建模中,经常会遇到实...与虚...,而且虚体的计算域好像也可以进行计算并得到所需的结果,对二者的根本区别及在功能上的不同
对于求解是没有任何区别的,只要你能在虚体或者实体上划分你需要的网格
--------------------------------------------------------------------------------
gambit的实体和虚体在生成网格和计算的时候对于结果没有任何影响,实体和虚体的主要区别有以下几点:
1。
实体可以进行布尔运算但是虚体不能,虽然不能进行布尔运算,但是虚体存在merge,split等功能。
2,实体运算在很多cad软件里面都有,但是虚体是gambit的一大特色,有了虚体以后,gambit的建模和网格生成的灵活性增加了很多。
3。
在网格生成的过程中,如果有几个相对比较评弹的面,你可以把它们通过merge合成一个,这样,作网格的时候,可以节省步骤,对于曲率比较大的面,可能生成的网格质量不好,这时候,你可以采取用split的方式把它划分成几个小面以提高网格质量
fluent必知的几个关系及定义
fluent中几个压力之间的关系及定义
在fluent中会出现这么几个压力:
Static pressure(静压)Dynamic pressure(动压)Total pressure(总压)
这几个压力是空气动力学的概念,它们之间的关系为:
Total pressure(总压)= Static pressure(静压z)+ Dynamic pressure(动压)
滞止压力等于总压(因为滞止压力就是速度为0时的压力,此时动压为0.)
Static pressure(静压)就是你测量的,比如你现在测量空气压力是一个大气压
而在fluent中,又定义了两个压力:
Absolute pressure(绝对压力)
Relative pressure(参考压力)
还有两个压力:
operating pressure(操作压力)
gauge pressure(表压)
它们之间的关系为:
--------------------------------------------------------------------------------
Absolute pressure(绝对压力)= operating pressure(操作压力)+ gauge pressure(表压。