最详细的ER1机器人介绍
Harsen HB1008ER1 机器人臂控制器 GU611A 操作手册说明书

The contents are intended for quick guidance and supplement to the user who is using GU611A controller .Please read the standard manual for more details..Ⅰ Controller DimensionModel Dimensions Panel CutoutW120mm×H102mm ×D48mmW110mm ×H92mm.Con Ⅱfigure running parameters1. Main buttons` instructionAUTO Mode Button /LEDMAN Mode Button/LEDSTART/V ALUE INCREASE “+”Push ButtonSTOP/RESET/V ALUE DECREASE “-”Push ButtonScroll Button/Enter into submenu/Modify/confirm modification / scroll menu to displayMUTE/LAMP TEST Button2. Parameters setting :For example: (setting controller crank attempt at 2)Press and hold “.ⅢParameters setting1.System Parameters:NO. Items Preset NO. Items Preset1.1 CT ratio 0()℃1.2 VT ratio 11.3 Rated ph-voltage1.4 AC voltage type1.5 Startup mode 0S1.6 Oil pressure unit0 2.7 Over current pre-alarm90% 2.8 Over current alarm115% 2.9 Over current action10S2.5 Hz low alarm 5S2.6 Hz high alarm 5S3. Engine Parameters:NO. Items Preset NO. Items Preset3.1 Pair of poles 10s3.2 Fuel mode 300S3.3 T-sensor type 20S3.4 P-sensor type 0RPM3.5 Start delay 1440RPM3.6 Crank attempt 1600RPM3.7 Crank time 1710RPM3.8 Crank rest 1.1BAR3.9 Crank cutout RPM 1.4BAR3.10 Crank cutout Oil-P92℃3.11 cutout P-delay100℃3.12 Idle delay 8.0V3.13 Preheat delay 28.0V3.14 Preheat mode 8.0V4.Configurable Inputs and Outputs:NO. Items Preset NO. Items Preset4.1 Configurable input 1 2S4.2 Configurable input 2 2S4.3 Configurable input 3 24.4 Input 1 delay 35. Mains ParametersNO. Item Preset NO. Item Preset5.1 Low Mains voltage 5S5.2 High Mains voltage 5S5.3 Mains frequency6.6 MAINS V2 offset6.7 MAINS V3 offset6.8 Pressure offset6.9 Temperature offset6.10 Batt. V offsetMenu notesl The optional items for P/T-sensor:Co de The brand model of LOP sensor The brand model of HET sensor0 not used not used1 close for low oil pressure close for high temperature2 open for low oil pressure open for high temperature3 VDO 5 bar VDO 120 ℃4 VDO 10 bar VDO 150 ℃5 Datcon 7 bar Datcon6 Murphy7 bar Murphy7 Pre-set 1 PT1008 Pre-set 2 Pre-set 19 Pre-set 3 Pre-set 210 Pre-set 4 Pre-set 311 configured by user Pre-set 412 configured by user●The optional items for configurable input:Co de Optional Function Co de Optional Function0 not used 7 Emergency stop1 Pre-alarm (active immediately) 8 Remote start signal2 Shutdown Alarm (active immediately) 9 Mains Aux. Switch closed3 Pre-alarm (active after safety-on delay) 10 Gen Aux. Switch closed4 Shutdown Alarm (active after safety-on delay) 11 Low fuel level5 LOP switch 12 Lamp test6 HET switch●The optional items for configurable output:Co de Failure Type Define Co de Failure Type Define0 Not used 1 Over current tripping2 Alarm3 Pre-alarm4 Idle 0 (N.C.)5 Preheat6 Speed up7 Reserved8 Fuel pump control 9 Running10 System in AUTO mode 11 Reserved12 System in MAN mode 13 Reserved14 Idle 1 (N.O.) 15 MCB failure (within 5s)16 GCB failure (within 5s) 17 Fail to startl Code Table for Failure:Name Code Name CodeCHARGE FAILUREBA TT. UNDER VOLTBA TT. OVER VOLTSTART FAILUREⅣ.TYPICAL WIRING DIAGRAMNOTE: If pin no. “16” is not used, DO NOT connect to negative.If you want more technical support, please call service hotline: 400 888 3388。
埃夫特 ER 系列机器人 操作手册说明书
2 手册使用 ........................................................................................................................................8
1.3 各工作过程中的安全注意事项 ...............................................................................................12
第 2 章 欢迎使用埃夫特机器人 ........................................................................................................... 20
相关活动的人员,在学习完毕埃夫特公司准备的培训课程前,请勿赋予其
对机器人的操作使用权限。
版本ቤተ መጻሕፍቲ ባይዱ:V 3.3.0.1
1
目录
概 述 ......................................................................................................................................................... 8
水下机器人新型仿鱼鳍推进器
文章编号:100220446(2000)0520427206水下机器人新型仿鱼鳍推进器Ξ刘军考 陈在礼 陈维山 王力刚(哈尔滨工业大学机械电子工程专业 哈尔滨 150001)摘 要:21世纪是人类开发海洋的世纪,水下机器人和自主无人潜器具有广阔的应用前景和巨大的潜在价值.仿鱼鳍水下推进器作为一种具有效率高、运动灵活以及噪音低等优点的新型水下推进器越来越受到广大科技工作者的重视.本文介绍了仿鱼鳍水下推进器的分类,特点,国内外研究成果与现状,以及目前的研究热点,并对未来发展趋势作了预测.关键词:鱼鳍;水下推进器;水下机器人中图分类号: T P 24 文献标识码: A1 引言自主无人潜器(AUV )与水下机器人在海洋地形勘测,矿藏勘察,海洋污染监察等许多领域具有广阔的应用前景和巨大的潜在价值.传统螺旋桨推进器具有:能源利用率低,结构尺寸和重量大,对环境扰动大,噪音大,可靠性差,起动、加速性能差以及运动灵活性能差等缺点.由于螺旋桨推进器能源利用率低,对微小型潜器和水下机器人而言,由于受体积和承载能力的限制不可能在其上加载太多的能源,只能在水下停留很短的时间,作业范围小,限制了它们的应用.这就使得科研工作者不得不寻找其它的驱动方式,以适应未来水下机器人技术发展要求.近年来,随着仿生学研究的不断进步,科研工作者的目光集中到长期生活在水下,特别是能在水中自由遨游的鱼类的游动机理的研究上.鱼类长期赖以生存在水下,进化出了性能完备的游动机能和器官.利用鱼类游动机理推动机器人在水下浮游的想法伴随着仿生学、材料科学、自动控制理论等学科的发展成为现实.2 仿鱼鳍水下推进器的特点及分类2.1 仿鱼鳍水下推进器的特点与传统螺旋桨推进器相比仿鱼鳍水下推进器具有如下特点:1)能源利用率高.初步试验表明采用仿鱼鳍新型水下推进器比常规推进器的效率可提高30-100%.从长远看,仿鱼鳍的水下推进器可以大大节省能量,提高能源利用率,从而延长水下作业时间[1].2)使流体性能更加完善.鱼类尾鳍摆动产生的尾流具有推进作用,可使其具有更加理想的流体动力学性能[1].3)提高水下运动装置的机动性能.采用仿鱼鳍水下推进器可提高水下运动装置的起动、加速和转向性能[1].第22卷第5期2000年9月机器人 ROBO T V ol .22,N o .5Sep t .,2000Ξ基金项目:国家自然科学基金资助项目(5970511).收稿日期:1999-11-154)可降低噪音和保护环境.仿鱼鳍推进器运行期间的噪音比螺旋桨运行期间的噪音要低的多,不易被对方声纳发现或识别,有利于突防,具有重要的军事价值.5)实现了推进器与舵的统一.仿鱼鳍推进器的应用将改变目前螺旋桨推进器与舵机系统分开,功能单一,结构庞大,机构复杂的情况,实现桨2舵功能合二而一.从而可精简结构和系统,简化制造工艺,并降低成本和造价,具有重大的现实意义和实用价值.6)可采用多种驱动方式.对于应用于船舶、游艇等方面的仿鱼鳍推进器可采用机械驱动,也可采用液压驱动和气压驱动,以及混合驱动方式;对于微小型水下运动装置,可采用形状记忆合金、人造合成肌肉以及压电陶瓷等多种驱动元件.2.2仿鱼鳍水下推进器的分类根据鱼类推进运动的特征水下推进器可以划分为两种基本模式:身体波动式和尾鳍摆动式[2].在波动式推进中,鱼类游动时整个身体(或几乎整个身体)都参与了大振幅的波动,如图1.由于在整个身体长度上至少提供了一个完整的波长,所以使横向力相抵消,使横向的运动趋势降低到最小.很多采用波动推进方式游动的鱼类通过改变波的方向能实现与向前运动一样的向后运动.波动式推进的推进效率主要与波的传播速度有关,波的传播速度越大,推进效率就越高.与尾鳍摆动式推进方式比较而言,身体波动式推进效率较低,主要适用于狭缝中的穿行.尾鳍摆动式推进方式是效率最高的推进模式,海洋中游动速度最快的鱼类都采用尾鳍摆动式推进模式,如图2.其特征是具有大展弦比的尾鳍,在运动过程中尾鳍摆动,而身体仅有小的摆动或波动,甚至保持很大的刚性.其推进效率主要与下列参数有关:1)尾鳍的形状比率为展弦比;2)尾鳍的形状为后掠角A 和前端的曲率;3)尾鳍的刚度;4)尾鳍的形状;5)尾鳍的动作.尾鳍摆动式推进具有很高的效率,适于长时间、长距离的游动,但运动灵活性能较差.另外,还有一些鱼类通过胸鳍等的摆动或波动方式推进,这种推进方式效率较低,但具有很好的机动性能和稳定性能,适用于对机动性能有特殊要求的水下机器人.图1 身体波动式推进模式 图2 尾鳍摆动式浮游模式3 仿鱼鳍水下推进器国内外研究现状目前,在新型仿鱼鳍水下驱动器的研究仅限于国外,如日本、美国等国家,国内有沈阳自动化所1996年开始了尾鳍推进器研究,哈尔滨工业大学机械电子工程专业在国家自然科学基金的资助下也正在进行,下面主要介绍日本和美国等国家的研究现状.根据推进器驱动元件的不同,可以分为两大类.一类是采用功能材料作为驱动元件,主要824 机 器 人2000年9月是压电陶瓷、形状记忆合金和人造合成肌肉,主要应用在微型水下推进器和水下机器人当中;另一类是采用常规驱动元件如电磁马达作为驱动元件,通过机构实现仿鱼鳍运动.3.1 功能材料在仿鱼鳍推进器中的应用3.1.1压电陶瓷在仿鱼鳍推进器中的应用日本名古屋大学的福田敏男(To sh i o Fukuda )先生提出了一种基于鱼类胸鳍游动推进机理由压电陶瓷推动两个对称膜片摆动的微型水下浮游机器人,并进行了一系列的研究[3,4].研制出了一种将压电陶瓷微位移进行放大的弹性铰链放大机构,其放大倍数为250.两个对称的膜片的摆动可以使横向力相抵消,前进的动力得到加强.该机器人长度约为32mm ,宽度为19mm ,其结构如图3所示.其运动速度为21.6×10-3~32.5×10-3m s ,该机器人在管道检查及生物、医学工程等领域有着广阔的应用前景和价值. 1——右驱动器2——左驱动器3——柔性铰链图3 压电陶瓷驱动微型水下浮游机器人结构 图4 放大机构原理简图放大机构的原理如图4所示,当压电陶瓷产生∃x 的微位移时,在三个节点A 、B 、C 处分别产生角位移.通过对称膜片的摆动可以使其在水下实现浮游,改变压电陶瓷的激励频率可以使膜片工作在不同的共振频率下,从而可以改变驱动力以及浮游速度.通过分别控制两个压电陶瓷的工作状态可以实现其转向运动.3.1.2 形状记忆合金在仿鱼鳍推进器和水下机器人中的应用福田敏男先生提出的另外一种微型仿鱼鳍水下机器人驱动器的驱动元件采用的是形状记忆合金(S M A ),进行了“分布式形状记忆合金驱动器及其在水下机器人的应用”的研究[5],提出了一种波形合成的方法,并研制了试验样机.所提出的形状记忆合金驱动器由几种模态的形状记忆合金(如图5所示)构成,根据形状记忆合金的激励方式的不同,通过波形合成可以产生多种形状,可以模拟鱼类波动推进方式游动,实现机器人的水下浮游.在该项研究中,所采用的是平带型形状记忆合金,并研究了其弯曲特性.该机器人构成原理图如图6所示.美国佛罗里达中心大学的科研人员正在研制一种微电子鱼机器人“M ER iF ”,该机器人的驱动系统完全由形状记忆合金制成.该机器人由5个子系统组成,1)控制系统,2)运动系统,3)驱动系统,4)悬浮系统,5)传感系统.该项研究有以下3个主要目的:1)模仿自然界的鱼类,通过鱼尾的摆动实现机器人的水下浮游;2)研制一种无噪声的水下驱动系统.利用常规电磁马达驱动的水下机器人有噪声,这将很难使机器人接近所要观察、研究的水下生物.该项研究中,驱动系统完全由形状记忆合金构成,能真正实现无噪声驱动;924第22卷第5期刘军考等: 水下机器人新型仿鱼鳍推进器1——基体2——S M A图5 S M A 波形示例 图6 S M A 驱动微型水下机器人构成原理3)大范围、长时间的水下作业.为了达到这一目的,采用一种“能量循环”的方法,当太阳能电池能量即将用尽时,机器人停止浮游,并且浮出水面,电池开始充电,充满后,机器人下潜,重新开始作业.通过这样一种方法可以实现大范围、长时间的水下作业.3.1.3 人造合成肌肉在仿鱼鳍推进器和水下机器人中的应用美国新墨西哥大学的M eth ran M ojarrad 和M oh sen Shah inpoo r 等人进行了人工合成肌肉在仿生机器人系统中的应用研究.该项目利用高分子电解质离子交换膜(IE M )通过化学镀的方法镀在金属铂片上,然后制成类似鱼鳍的带状薄片.在外加电场的作用下,高分子电解质离子交换膜产生类似鳗鱼的波动,带动金属铂片一起摆动产生推进力,从而推动水下机器人运动,其驱动器原理如图7所示.实验结果表明,其运动速度与波动频率和振幅成正比,并且与推进器的几何形状与流体性质有关[6]. 1——IE M 2P t 合成致动器 2——电极 图7 IE M 2P t 人工合成肌肉驱动器 图8 仿黑色鲈鱼机器鱼3.2 电磁马达驱动仿生机器鱼日本和美国在电磁马达驱动仿生机器鱼这方面进行了大量的系统研究,取得了大量研究成果,均成功的研制出了实验样机.日本N .Kato 等人于1996年研究了黑色鲈鱼的胸鳍动作原理,初步分析了胸鳍动作状态与游动姿态的关系.N .Kato 从水下运动装置的机动性能出发主要分析了鱼在水平平面以及垂直平面上的盘旋及转向运动与鱼的胸鳍动作之间的关系,鱼在前进、后退运动等情况下的胸鳍的动作,并研制了实验样机(如图8所示),该样机可以用PC 机来控制以实现类似于鱼类的运动[7].日本东芝公司的研究人员研制出了无线控制的能象真鱼一样游动的仿生机器鱼,该机器034 机 器 人2000年9月鱼长约60c m ,重约6磅.该机器鱼通过一台台式计算机控制它的一个尾鳍、两个胸鳍的运动.由于没有必要完全精确的复制海洋鱼类的驱动方式,所以采用弹性振动鳍制作了实验样机.电池驱动的鳍的摆动频率为0.2~1H z ,机器鱼的游动速度可达0.25m s.美国麻省理工学院在仿生机器鱼的研究方面取得了大量研究成果,先后研制了两条机器鱼“T una ”及“P ike ”.通过长时间的观察鱼类的游动情况,麻省理工学院的科研人员研制了第一条机器鱼T una .研制该机器鱼的目的是克服目前水下机器人和水下潜器的连续工作时间短的限制,也就是电池寿命的限制.受机器人和潜水器的体积以及承载能力等因素的限制,不可能装备足够的能源,通过采用基于新型仿鱼鳍驱动原理的新型驱动器可以使问题得到解决,因为鱼类具有效率、性能最高的水下驱动系统.当一个刚性物体在水中移动时,在它的侧面会产生涡流,因而会降低运动物体的速度,增加消耗的动力.但金枪鱼游动时,可利用尾巴的摆动把涡流的阻力转化为一种推进的动力[5].T una 是一条长约4英尺,由2843个零件组成的,具有高级推进系统的金枪鱼.它是模仿蓝鳍金枪鱼制造的.T una 具有关节式铝合金脊柱、真空聚苯乙烯肋骨、网状泡沫组织,并用聚氨基甲酸酯弹性纤维纱表皮包裹,它装有多台2马力的无刷直流伺服电动机(T una 实际上只使用每台电机额定功率得十分之一)、轴承及电路等.T una 在多处理器控制下,通过摆动躯体和尾巴,能象真鱼一样游动,速度可达7.2公里 小时(4节).T una 的摆动式尾巴有助于机器鱼的驱动,推进效率达91%.T una 的结构如图9所示.机器鱼“P ike ”的研制目的是为了揭示鱼类为什么比我们想象的游的要快的原因,因为鱼类看上去不具备使其游的那样快的肌肉力量.同时证明其具有良好的在静止状态下的转向和加速能力.野生梭子鱼从静止状态到速度为6m s 的加速度为8-12g (g —重力加速度),我们只要能获得其数值的一半甚至四分之一就已经相当可观了,这将证明比传统的螺旋桨推进具有更好的加速能力.机器鱼“P ike ”的硬件系统主要有以下几部分构成:头部、胸鳍、尾鳍、背鳍、主体伺服系统、尾部伺服系统、尾鳍伺服系统、胸鳍伺服系统以及电池等(机器鱼P ike 组装图如图10).图9 机器鱼“T una ”结构图 图10 机器鱼“P ike ”组装图4 目前研究热点及未来发展预测目前,新型仿鱼鳍水下机器人的研究及未来发展主要集中在以下几方面:(1)尾鳍摆动式推进模式水动力学模型的建立;(2)尾鳍摆动时尾流的产生及其与推进力和推进效率关系数学模型的建立;(3)弹性元件在降低尾鳍摆动能量损失中的应用;()134第22卷第5期刘军考等: 水下机器人新型仿鱼鳍推进器234 机 器 人2000年9月(5)机器人的微型化.未来的水下机器人应该具有象鱼一样高的推进效率、快的游动速度,以及极好的运动灵活性能,来适应未来开发和探测海洋的需要.5 结论新型仿鱼鳍水下推进器可大大提高水下推进器的效率,提高能源利用率,降低推进器噪声,并且可使水下运动装置的机动性能得到提高.新型仿鱼鳍水下推进器在水下机器人和水下潜器等领域有着巨大的应用前景和潜在价值.本文介绍了新型仿鱼鳍水下推进器的特点、分类,国外目前在新型防鱼鳍水下推机器方面的研究概况,所取得的研究成果以及该项研究中的研究热点,并对未来发展趋势做出了预测.参 考 文 献1 T riantafyll ou M S,T riantafyll ou G S.A n Efficient S w i m m ing M achine.Scientific Am erican.M arch1995:64-702 Sfaki otakis M,L ane D M,B ruce J,D avies C.Revie w of F ish S w i m m ing M odes for A quatic Locomoti on.IEEE Journal of O cean Engineering.1999,24(2):237-2523 Toshi o Fukuda,A tsushi Ka w a moto,Fum ihito A rai,H ideo M atsuura.M echanis m and S w i m m ing Experi m ent ofM icro M obile Robot.P roceedings of the1994IEEE Internati onal Conference on Robotic and A utom ati on.1994:814-8194 Toshi o Fukuda,A tsushi Ka w a moto,Fum ihito A rai,H ideo M atsuura.Steering M echanis m of U nder w ater M icro M obile Robot.P roceedings of the1995IEEE Internati onal Conference on Robotic and A utom ati on.1995:363-3685 Toshi o Fukuda,H ide m i Hos okai,Isa m u Kikuchi.D istributed Type of A ctuators of ShapeM e mory A ll oy and ItsA pp licati on to U nder w ater M obile Robotic M echanis m s.P roceedings of the1990IEEE Internati onal Conference on Robotic andA utom ati on.1990:1316-13216 M ojarrad M,Shahinpoor M.B i om i m etic Robotic P ropulsi on U sing Polym eric A rtificialM uscles.P roceeding of the1997IEEE internati onal conference on Robotics and A utom ati on.1997:2152-21577 Kato N aom,et al.Pectoral fin model for m aneuver of under w ater vehicles.IEEE Symp A uton U nder w ater V eh Tech,1996: 43-56A NE W T Y PE OF UND ER W ATER TURBI NE I M I TATI NGF I SH-F I N F OR UND ER W ATER ROB OTL I U Jun2kao CH EN Zai2li CH EN W ei2shan WAN G L i2gang(D ep t.O f M echatronic E ng ineering,H arbin Institute of T echnolog y,H arbin 150001) Abstract:T he21century is a peri od for hum an beings to exp l ore oceans.A utonomous under w ater veh icles and under w ater robots expect an expansive app lied future and are of great potential value.A ne w type of under w ater turbine has been paid more and more attenti on for its h igh efficiency,m aneuverability and l ow noise.T h is paper introduces the classificati on and the characteristics of ne w type under w ater turbine i m itating fish2fin,als o introduces the research ach ieve m ents and current state hom e and abroad,and forecasts the devel op ing tendency. Keywords:F ish2fin,under w ater turbine,under w ater robot作者简介: 刘军考(19732),男,博士研究生.研究领域:水下驱动器. 陈维山(19662),男,博士、教授.研究领域:超声驱动器,航天地面模拟器,特种驱动器.。
史上最完整的机器人工作原理解析
史上最完整的机器人工作原理解析很多人一听到机器人这三个字脑中就会浮现外形酷炫、功能强大、高端等这些词,认为机器人就和科幻电影里的终结者一样高端炫酷。
其实不然,在本文中,我们将探讨机器人学的基本概念,并了解机器人是如何完成它们的任务的。
一、机器人的组成部分从最基本的层面来看,人体包括五个主要组成部分:当然,人类还有一些无形的特征,如智能和道德,但在纯粹的物理层面上,此列表已经相当完备了。
机器人的组成部分与人类极为类似。
一个典型的机器人有一套可移动的身体结构、一部类似于马达的装置、一套传感系统、一个电源和一个用来控制所有这些要素的计算机大脑。
从本质上讲,机器人是由人类制造的动物,它们是模仿人类和动物行为的机器。
仿生袋鼠机器人机器人的定义范围很广,大到工厂服务的工业机器人,小到居家打扫机器人。
按照目前最宽泛的定义,如果某样东西被许多人认为是机器人,那么它就是机器人。
许多机器人专家(制造机器人的人)使用的是一种更为精确的定义。
他们规定,机器人应具有可重新编程的大脑(一台计算机),用来移动身体。
根据这一定义,机器人与其他可移动的机器(如汽车)的不同之处在于它们的计算机要素。
许多新型汽车都有一台车载计算机,但只是用它来做微小的调整。
驾驶员通过各种机械装置直接控制车辆的大多数部件。
而机器人在物理特性方面与普通的计算机不同,它们各自连接着一个身体,而普通的计算机则不然。
大多数机器人确实拥有一些共同的特性首先,几乎所有机器人都有一个可以移动的身体。
有些拥有的只是机动化的轮子,而有些则拥有大量可移动的部件,这些部件一般是由金属或塑料制成的。
与人体骨骼类似,这些独立的部件是用关节连接起来的。
巡检机器人 维护使用手册说明书

巡检机器人维护使用手册版本:2.0北京眸视科技有限公司目录1.产品概述 (4)1.1.产品概述 (4)1.2.履带式机器人 (5)1.3.轮式机器人 (5)2.机器人开机 (6)2.1.机器人开机 (6)2.2.遥控器使用 (6)2.3.遥控器高级使用 (7)2.4.注意事项 (9)3.平板控制 (10)3.1.Wifi连接 (10)3.2.运行APP (10)3.3.自启动功能 (10)3.4.License更新功能 (11)3.5.参数配置 (14)3.6.状态检查 (15)3.7.开启巡检 (16)4.制图 (17)4.1.制图 (17)4.2.地图编辑 (20)4.3.地图备份与切换 (25)4.4.注意事项 (27)4.4.1.制图之前的准备 (28)4.4.2.建图操作原则 (28)4.4.3.建图结果检查 (30)5.导航 (31)5.1.导航到指定点 (31)5.2.导航到指定坐标 (32)5.3.取消导航 (32)6.1.准备工作 (34)6.2.工具安装 (34)6.2.1.开启root ssh权限 (34)6.2.2.JDK的安装 (35)6.2.3.TOMCAT安装 (35)6.2.4.MySQL数据库在线安装 (36)6.2.5.Redis安装 (37)6.2.6.Nginx安装 (37)6.3.程序部署 (38)6.3.1.前端web程序部署 (38)6.3.2.后端jar包部署 (39)6.4.系统参数配置 (41)6.4.1.域名地址映射 (41)6.4.2./etc/profile确认 (41)6.5.启动管理云平台系统程序 (41)6.5.1.后台java程序启动 (42)6.5.2.前台tomcat启动 (42)6.5.3.确认后台程序是否启动成功 (42)6.5.4.访问系统url (42)7.云平台使用 (43)7.1.系统登录 (43)7.1.1.系统首页 (44)7.1.2.个人中心 (45)7.2.实时监控 (45)7.3.数据查询 (47)7.3.1.巡检报表 (47)7.3.2.巡检点 (48)7.3.3.环境数据 (48)7.4.巡检任务 (49)7.4.1.任务管理 (49)7.4.2.任务日历 (51)7.5.1.巡检点管理 (52)7.5.2.地图管理 (53)7.5.3.机器人管理 (54)7.5.4.告警设置 (55)7.6.系统管理 (56)7.6.1.用户管理 (56)7.6.2.角色管理 (57)7.6.3.菜单管理 (59)7.6.4.场站管理 (59)7.6.5.字典管理 (60)7.6.6.车体状态 (61)7.6.7.版本信息 (62)8.巡检 (63)8.1.启动检查 (63)8.2.云平台操作 (64)9.注意事项 (66)9.1.常规检查 (66)9.2.维护保养 (66)9.3.长期储存 (67)10.快速故障排除 (69)10.1.机器人故障排查 (69)10.2.云端服务故障排查 (71)10.3.遥控器故障排查 (72)附录1:充电桩安装说明 (75)附录2、传感器清洁 (76)附录3、产品参数 (77)1.产品概述1.1.产品概述眸视机器人定位和导航系统,是一个集激光雷达、视觉(双目相机、深度相机)、超声波、惯性测量单元(IMU)等多种传感器于一体的定位和导航系统。
码垛机器人的详细教程不可错过
码垛机器人的详细教程不可错过码垛机器人在实际的使用场景中,工件加工前与加工后都是放在特定的储存场所如货架、栈板、周转小车等地方。
固定的地方,在机器人使用中称为垛,将工件从垛中取出或放上去的动作称为码垛,对于该设备的具体使用教程见下文:一、上电主电器柜上电后,将机器人掌握柜上的电源开关由OFF顺时针拨到ON。
二、机器人掌握柜上电后,首先观看机器抓手的位置,若是正常工作突然断电的状况,重新上电,自动状态启动后,机器人会按断电前的工作状态连续工作。
若是程序要重新从第0步运行的话,机械手必需位于两个辊道抓取区的位置之一,否则程序无法运行,需手动将抓手运行到位。
三、将掌握柜和示教器上的自动/手动掌握开关都打到手动位置1.将抓手运行到1#位:手动将抓手运行到1#辊道抓取区上端,然后调入100#程序,手动运行第3行程序,然后运行到第5行程序,将抓手运行到位;2.将抓手运行到2#位:手动将抓手运行到2#辊道抓取区上端,然后调入100#程序,手动运行第7程序,然后运行到第9行程序,将抓手运行到位。
四、退出100#程序。
将掌握柜和示教器上的自动/手动掌握开关都打到自动位置,调入50#码垛主程序运行。
五、送入托盘、满托盘铲走后、辊道线停止重新启动都需要按绿色启动按钮码垛才能开头。
六、若是码垛过程中消失特别状况,急停后,需要手动移动机器手离开急停时的位置,若还要连续码垛,必需记住急停时抓手所处位置,不能调用100#程序移动抓手,只能用手动方式移动抓手,处理完后,用手动方式将抓手移动到急停时的位置,再转到自动方式连续进行码垛,否则,必需将已码垛托盘铲走,50#主程序从第0步开头运行,码垛重新开头。
七、通过通用输入信号监视器查看托盘数和托盘检测光电传感器的信号输入是否正确,检查平安光电传感器信号输入是否正确。
检查辊道输送线掌握触摸屏上的辊道线工作状态及光电传感器的输入信号是否和实际状况正确对应。
八、若抓手抓取工件的基准位置和辊道上端位置变化,首先依次将抓手移动到四个位置,同时将四个原始位置在100#程序中进行更改,即100#程序的四个轨迹点:1.Convyer1 upside(输出信号O34);2.Convyer1 clamp position(输出信号O36);3.Convyer2 upside(输出信号O35);4.Convyer1 clamp position(输出信号O37)。
埃斯顿 ER100-3550-DW 机器人说明书

ESTUN机器人ER100-3550-DW本体使用说明书感谢您使用埃斯顿机器人产品。
在使用机器人之前,务必仔细阅读机器人安全使用须知,并在理解该内容的基础上使用机器人。
本公司致力于不断提升产品品质,本手册中与产品有关的规格和信息如有改动,恕不另行通知。
本手册中所有陈述、信息和建议均已经过慎重处理,但不保证完全正确。
本公司对于因使用本手册而造成的直接或间接损失不负任何责任。
用户必须对其应用任何产品负全部责任,须谨慎使用本手册及产品。
本手册所有内容的解释权属南京埃斯顿机器人工程有限公司。
本手册未对任何一方授权许可,不得以任何方式复制和拷贝其中的全部或部分内容。
版权所有:南京埃斯顿机器人工程有限公司产品服务热线:400-025-3336地址:南京市江宁经济开发区吉印大道1888号邮编:211102电话:************公司主页:电子邮箱:***************安全使用须知本章说明为安全使用机器人而需要遵守的内容。
在使用机器人之前,务必熟读并理解本章中所述内容。
使用埃斯顿机器人的公司、个人应该熟读所在地区、国家的标准和法律,并且安装适当的安全设施保护机器人的使用人员。
使用前(安装、运转、保养、检修),请务必熟读并全部掌握本说明书和其他附属资料,在熟知全部设备知识、安全知识及注意事项后再开始使用。
但是使用人员即使完全按照手册中给出的所有安全信息进行,埃斯顿公司也无法保证使用人员不会受到任何伤害。
使用人员的定义使用人员的定义如下所示。
•操作人员进行机器人的电源ON/OFF操作。
从操作面板启动机器人程序。
•程序人员进行机器人的操作。
在安全区域内进行机器人的示教等。
•维修人员进行机器人的操作。
在安全区域内进行机器人的示教等。
进行机器人的维护(修理、调整、更换)作业。
操作人员不能在安全区域内进行作业。
程序人员和维修人员可以在安全区域内进行作业。
在进行机器人的操作、编程、维护时,操作人员、程序人员、维修人员必须注意安全,至少应穿戴以下物品进行作业。
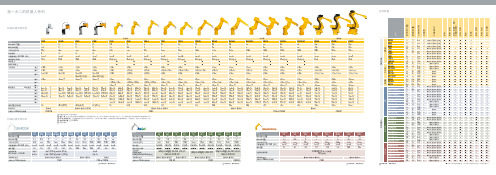
史陶比尔 机器人 (产品系列)
200 mm
200 mm (400 mm 可选)
200 mm (400 mm 可选)
±138°
±500° (4)
±500° (4)
±500° (4)
±270°
-
-
-
+133.5°/-120°
-
-
-
±270° (4)
350°/s 360°/s 350°/s 360°/s 290°/s 290°/s 287°/s 555°/s
±270° +130°/-110° ±270° (4) 130°/s 155°/s 115°/s 130°/s 135°/s 205°/s 190°/s 237°/s 200°/s 243°/s 297°/s 562°/s 726
CS8 或 CS8 M
RX170 HP 65 60 1835 6 ±0.04 IP65 (67)
l l
±180° ±120° ±145°
RX260 150 130 2831 6 ±0.07 IP65
±180° +75°/-55° +110°/-170°
±270°
±280°
+130°/-110°
±120°
±270° (4) 91°/s 57°/s
155°/s 130°/s
±2700° 108°/s (5) 104°/s (5)
手臂安装方式 史陶比尔CS8系列控制器
TX40 TX60 CR/ TX60 L TX90 TX90 L TX90 XL RX160 RX160 L RX130
CR
SCR CR/SCR CR/SCR CR/SCR CR/SCR CR
CR XL CR
2,3
ER系列工业机器人操作手册说明书

ER系列工业机器人操作手册(RCS2V1 16)修订记录目录修订记录 (i)目录 (i)前言 (vi)概述 (vi)本书常用词汇 (vi)符号约定 (vi)安全注意事项 (vii)第1 章安全................................................................................................................................... 1-11.1 保障安全 .............................................................................................................................................. 1-11.2 专门培训 .............................................................................................................................................. 1-11.3 机器人使用说明书清单....................................................................................................................... 1-11.4 操作人员安全注意事项....................................................................................................................... 1-21.5 机器人的安全注意事项....................................................................................................................... 1-31.5.1 安装及配线安全 .............................................................................................................................................. 1-31.5.2 作业区安全 ...................................................................................................................................................... 1-41.5.3 操作安全 .......................................................................................................................................................... 1-51.6 移动及转让机器人的注意事项........................................................................................................... 1-61.7 废弃机器人的注意事项....................................................................................................................... 1-6第2 章产品确认........................................................................................................................... 2-12.1 装箱内容确认....................................................................................................................................... 2-12.2 订货号确认 .......................................................................................................................................... 2-1第3 章安装................................................................................................................................... 3-13.1 搬运方法 .............................................................................................................................................. 3-13.1.1 用吊车搬运电控柜 .......................................................................................................................................... 3-13.1.2 用叉车搬运电控柜 .......................................................................................................................................... 3-13.2 安装场所和环境................................................................................................................................... 3-23.3 安装位臵 .............................................................................................................................................. 3-2第4 章配线................................................................................................................................... 4-14.1 电缆连接的注意事项........................................................................................................................... 4-14.2 供电电源 .............................................................................................................................................. 4-14.3 连接方法 .............................................................................................................................................. 4-24.3.1 连接供电电缆 .................................................................................................................................................. 4-24.3.2 连接示教编程器 .............................................................................................................................................. 4-2第5 章电源的接通与切断........................................................................................................... 5-15.1 接通主电源 .......................................................................................................................................... 5-15.1.1 接通主电源 ...................................................................................................................................................... 5-15.1.2 初始化诊断 ...................................................................................................................................................... 5-15.1.3 初始化诊断完成时的状态............................................................................................................................... 5-25.2 接通伺服电源....................................................................................................................................... 5-25.3 切断电源 .............................................................................................................................................. 5-35.3.1 切断伺服电源(急停) .................................................................................................................................. 5-35.3.2 切断主电源 ...................................................................................................................................................... 5-3第6 章动作确认........................................................................................................................... 6-1第7 章系统部件........................................................................................................................... 7-17.1 电控柜 .................................................................................................................................................. 7-17.2 电源单元 .............................................................................................................................................. 7-37.3 控制单元 .............................................................................................................................................. 7-37.4 伺服驱动单元....................................................................................................................................... 7-57.5 输入输出单元....................................................................................................................................... 7-67.5.1 耦合器EE-R00 ................................................................................................................................................ 7-67.5.2 数字输入ER-1311 ........................................................................................................................................... 7-97.5.3 数字输出ER-2341 ......................................................................................................................................... 7-127.5.4 I/O从站的安装与组网 ................................................................................................................................... 7-157.6 示教编程器 ........................................................................................................................................ 7-207.6.1 外观 ................................................................................................................................................................ 7-207.6.2 按键 ................................................................................................................................................................ 7-217.6.3 显示 ................................................................................................................................................................ 7-227.6.4 模式开关介绍 ................................................................................................................................................ 7-247.6.5 急停按钮介绍 ................................................................................................................................................ 7-257.6.6 伺服使能开关介绍 ........................................................................................................................................ 7-257.6.7 示教编程器内部的接线端子信号定义......................................................................................................... 7-267.6.8 示教编程器线缆 ............................................................................................................................................ 7-26第8 章操作说明........................................................................................................................... 8-18.1 机器人的坐标系................................................................................................................................... 8-18.1.1 坐标系种类 ...................................................................................................................................................... 8-18.1.2 关节坐标系 ...................................................................................................................................................... 8-18.1.3 直角坐标系 ...................................................................................................................................................... 8-28.1.4 工具坐标系 ...................................................................................................................................................... 8-38.2 示教 ...................................................................................................................................................... 8-48.2.1 急停的确认 ...................................................................................................................................................... 8-48.2.2 示教模式及安全性保证 .................................................................................................................................. 8-48.2.3 示教前的准备 .................................................................................................................................................. 8-48.2.4 示教的基本步骤 .............................................................................................................................................. 8-58.2.5 轨迹的确认 .................................................................................................................................................... 8-108.2.6 程序的修改 .................................................................................................................................................... 8-118.3 再现 .................................................................................................................................................... 8-128.3.1 再现前的准备 ................................................................................................................................................ 8-128.3.2 再现步骤 ........................................................................................................................................................ 8-128.3.3 停止与再启动 ................................................................................................................................................ 8-128.3.4 修改再现速度 ................................................................................................................................................ 8-14第9 章系统功能介绍................................................................................................................... 9-19.1 工程管理 .............................................................................................................................................. 9-19.1.1 新建工程或程序 .............................................................................................................................................. 9-19.1.2 删除工程或程序 .............................................................................................................................................. 9-29.1.3 重命名工程或程序 .......................................................................................................................................... 9-39.1.4 复制/粘贴工程或程序 ..................................................................................................................................... 9-39.1.5 加载/注销工程或程序 ..................................................................................................................................... 9-39.1.6 自启动程序 ...................................................................................................................................................... 9-49.2 程序编辑 .............................................................................................................................................. 9-69.2.1 新增指令 .......................................................................................................................................................... 9-69.2.2 撤销指令 .......................................................................................................................................................... 9-89.2.3 其它操作 .......................................................................................................................................................... 9-99.3 程序数据 ............................................................................................................................................ 9-129.3.1 新增变量 ........................................................................................................................................................ 9-129.3.2 标准区域变量 ................................................................................................................................................ 9-159.3.3 多边体区域变量 ............................................................................................................................................ 9-169.3.4 工具坐标系变量 ............................................................................................................................................ 9-179.3.5 用户坐标系变量 ............................................................................................................................................ 9-189.3.6 外部工具坐标系变量 .................................................................................................................................... 9-199.3.7 其它操作 ........................................................................................................................................................ 9-209.4 IO检测 ................................................................................................................................................ 9-229.5 位臵管理 ............................................................................................................................................ 9-249.6 系统日志 ............................................................................................................................................ 9-259.6.1 查看系统日志 ................................................................................................................................................ 9-259.6.2 查看和导出系统日志 .................................................................................................................................... 9-269.7 系统设臵 ............................................................................................................................................ 9-299.7.1 用户管理 ........................................................................................................................................................ 9-299.7.2 通用设臵 ........................................................................................................................................................ 9-309.7.3 高级设臵 ........................................................................................................................................................ 9-31第10 章变量介绍....................................................................................................................... 10-110.1 基本数据类型................................................................................................................................... 10-110.2 位臵数据类型................................................................................................................................... 10-310.3 系统数据类型................................................................................................................................... 10-810.4 IO数据类型 .................................................................................................................................... 10-1410.5 摆动数据类型................................................................................................................................. 10-1510.6 时钟数据类型................................................................................................................................. 10-1610.7 区域数据类型................................................................................................................................. 10-1710.8 PLC数据类型 ................................................................................................................................. 10-1810.9 码垛数据类型................................................................................................................................. 10-1910.10 SOCKET数据类型....................................................................................................................... 10-20第11 章指令介绍....................................................................................................................... 11-111.1 运动指令........................................................................................................................................... 11-111.2 控制指令......................................................................................................................................... 11-1811.3 等待指令......................................................................................................................................... 11-2211.4 IO指令 ............................................................................................................................................ 11-2311.5 设臵指令......................................................................................................................................... 11-2811.6 位臵运算指令................................................................................................................................. 11-3211.7 传送带跟随指令............................................................................................................................. 11-3311.8 位运算指令..................................................................................................................................... 11-4011.9 时钟指令......................................................................................................................................... 11-4111.10 区域指令....................................................................................................................................... 11-4211.11 视觉指令....................................................................................................................................... 11-4211.14 软浮动指令................................................................................................................................... 11-5011.15 数学运算函数............................................................................................................................... 11-5111.16 字符串指令................................................................................................................................... 11-5511.17 阵列指令....................................................................................................................................... 11-6011.18 ModbusTCP指令 .......................................................................................................................... 11-62第12 章高级功能....................................................................................................................... 12-112.1 多类型区域监控............................................................................................................................... 12-112.2 碰撞检测 .......................................................................................................................................... 12-512.3 振动抑制 .......................................................................................................................................... 12-612.4 传送带跟随....................................................................................................................................... 12-712.5 系统IP设臵................................................................................................................................... 12-1212.6 示教器升级与备份......................................................................................................................... 12-1512.6.1 示教器程序升级 ........................................................................................................................................ 12-1512.6.2 示教器程序备份 ........................................................................................................................................ 12-1812.7 控制器运行程序更新..................................................................................................................... 12-1912.7.1 控制器程序更新 ........................................................................................................................................ 12-1912.7.2 控制器程序还原 ........................................................................................................................................ 12-2012.7.3 备份导出 .................................................................................................................................................... 12-2112.7.4 工程导入 .................................................................................................................................................... 12-2312.8 一点到达功能介绍......................................................................................................................... 12-2412.9 工具坐标系标定............................................................................................................................. 12-2512.10 用户坐标系/外部工具坐标系标定.............................................................................................. 12-2912.11 外部TCP功能 ............................................................................................................................. 12-3212.12 一点对正坐标轴........................................................................................................................... 12-3412.13 伺服管理 ...................................................................................................................................... 12-3612.14 二维视觉的使用........................................................................................................................... 12-3912.15 三维视觉的使用........................................................................................................................... 12-4112.16 ModbusTCP ................................................................................................................................... 12-4412.17 锁机与解除................................................................................................................................... 12-4812.18 软浮动功能................................................................................................................................... 12-5212.19 九点标定功能............................................................................................................................... 12-5612.20 多工位预约................................................................................................................................... 12-5812.21 变位机功能................................................................................................................................... 12-6312.22 倒序执行 ...................................................................................................................................... 12-6712.23 伺服参数自调节功能................................................................................................................... 12-6812.24 跨腕部奇异功能........................................................................................................................... 12-6912.25 回零功能 ...................................................................................................................................... 12-6912.25.1 功能概述 .................................................................................................................................................. 12-6912.25.2 整体回零 .................................................................................................................................................. 12-7012.25.3 单轴回零 .................................................................................................................................................. 12-7012.26 保养提示 ...................................................................................................................................... 12-7312.27 Scara快速标定.............................................................................................................................. 12-7512.28 去限位块丢零保护功能............................................................................................................... 12-84第13 章附录............................................................................................................................... 13-113.1 示教器权限分配表........................................................................................................................... 13-113.2 ModbusTCP控制接口数据表 .......................................................................................................... 13-413.3 报警信息一览表............................................................................................................................ 13-7前言概述本文档适用于控制系统RCS2 V1.28,描述了ER系列机器人的构成及其示教控制器的操作,有助于使用者了解并能掌握ER系列机器人的操作和使用。
埃斯顿机器人ER系列机器人操作手册
安全注意事项使用前(安装、运转、保养、检修),请务必熟读并全部掌握本说明书和其他附属资料,在熟知全部设备知识、安全知识及注意事项后再开始使用。
本说明书中的安全注意事项分为“危险”、“注意”、“强制”、“禁止”四类分别记载。
误操作时有危险,可能发生死亡或重伤事故。
误操作时有危险,可能发生中等程度伤害、轻伤事故或物件损坏。
必须遵守的事项禁止的事项即使是属于“注意”类的事项,也会因情况不同而产生严重后果,故任何一条“注意”事项都极为重要,请务必严格遵守。
虽然不符合“注意”或“危险”的内容,但为了确保安全和有效的操作,用户也必须遵守的事项,将会在相关处加以叙述。
●操作机器人前,按下机器人电控柜前门及示教器上的急停键,并确认伺服电源被切断。
伺服紧急情况下,若不能及时制动机器人,则可能引发人身伤害或设备损坏事故。
急停键●解除急停后再接通伺服电源时,要解除造成急停的事故后再接通伺服电源。
由于误操作造成的机器人动作,可能引发人身伤害事故。
急停状态解除●机器人在正常运行过程中拍下急停属于非法操作,会明显减少电机及减速机的使用寿命,只有在紧急情况下如操作人员遇到潜在的危险等情况下可拍下急停按钮。
●在机器人动作范围内示教时,请遵守以下事项:- 保持从正面观看机器人。
- 遵守操作步骤。
- 考虑机器人突然向自己所处方位运动时的应变方案。
- 确保设置躲避场所,以防万一。
■由于误操作造成的机器人动作,可能引发人身伤害事故。
●进行以下作业时,请确认机器人的动作范围内没人,并且操作者处于安全位置操作:- 机器人电控柜接通电源时。
- 用示教器操作机器人时。
- 试运行时。
- 自动再现时。
不慎进入机器人动作范围内或与机器人发生接触,都有可能引发人身伤害事故。
另外,发生异常时,请立即按下急停键。
急停键位于电控柜前门及示教器的右侧。
本书常用词汇定义“ESTUN ROBOTICS”是埃斯顿工业机器人的商品名。
ESTUN ROBOTICS 由机器人本体“机器人”、机器人电控柜“电控柜”、“示教器”和“供电电缆”构成。
韩国韩端机器人介绍

Page
8
IYRC赛事介绍
Page
9
IYRC简介
国际青少年机器人竞赛(简称IYRC),竞赛是由韩国机 器人协会,韩国SRC机器人会社组办,韩端科技(深圳)有 限公司负责中国赛区承办的一项机器人赛事,比赛于2011年 7月在中国深圳成功举办第一届,并在韩国丽水举办了国际 赛。 在中国赛区中,汇聚了来自广东,湖南,安徽,福建, 重庆,四川,新疆等约500名选手及教练员,在韩国国际赛 中,有100多名中国优秀选手参加了在韩国丽水举行的国际 赛。
Page
18
Page
15
龙
仁
2011国际赛旅游部分部分线路安排
在酒店吃完早餐后,坐大巴去龙仁EVER LAND观光游玩。龙仁EVER LAND 是韩国最大的主题游乐园。里面有各种游乐设施和商店,公园,动物园等。相 当于大型迪斯尼乐园的概念。晚上在龙仁住宿。 交通工具:豪华40坐大巴,一车配一名导游。 住宿条件:3星级或4星级HOTEL。
Page 12
APRC
ER20-C10 机器人电气操作维护手册20130419
安徽埃夫特智能装备有限公司
ER20-C10 机器人电气操作维护手册
目录
1 安全注意事项.............................................................................................................................. 1 1.1 机器人安全使用须知....................................................................................................... 1 1.1.1 操作调试机器人时的安全注意事项.................................................................... 1 1.1.2 机器人本体的安全对策........................................................................................ 3 1.1.3 试车安全对策........................................................................................................ 5 1.1.4 自动运转的安全对策............................................................................................ 5 1.2 以下场合不可使用机器人............................................................................................... 6 1.3 安全操作规程................................................................................................................... 6
下肢康复训练机器人研究进展
—
中国康复理论 与实践 2 1 年 8 第 l卷第 8 C iJ eaiTer PatA g2 1, o 1, o8 02 月 8 期 h R hblho rc u,02V 1 8N . n y , .
DOI 1 .9 9 . s . 0 —7 1 0 20 .0 : O 6  ̄ i n 1 6 9 7 . 1 .8 9 3 s 0 2 0
的 支 持 。 - 康 复 机 器 人 ( hblai b t 作 为 一 种 新 型 机 器 人 ,它 r ait o r os e itn o )
进运 动康 复和实现运动控制 ,自动化和机器人辅助 的运 动康复
从 上 世 纪 9 年代 开始 出现 。 0 下肢康复 机器人疗法 最初集 中在肌 肉的运动知觉 反馈上 , 后 来 扩 展 到 以功 能 电刺 激 和 虚 拟 现 实 为基 础 的 治 疗 系 统 。 第 一
效 加快 康复进程 ,提 高康 复疗效u 删。 早期的减重步行康复训练设备 ,借 助于跑步机 、悬 吊带等
帮 助 患 者 进 行 下 肢 运 动 训 练 。 此 类 产 品结 构 简 单 、价 格 便 宜 , 但 训 练 过 程 中必 须 有 专 业 人 员 的帮 助 ,而 且 随 意 性 较 强 ,不 符 合 人 体 的运 动 机 理 ,只 能用 于病 情 较 轻 的 患 者 。随 着 机 器 人 技
R nh o Amio 医疗 中 心 和 Me t nc 司 共 同开 发 。 尽 管 ac oL s gs dr i公 o 电极 的植 入会 导 致 感 染 等一 系列 问 题 ,总 体 来 说 植 入 型 足 下 垂 刺 激 器 仍 是 早 期 康 复 机 器 人 一 个 成 功 的 典 范 。
ER 系列工业机器人 传送带跟随功能操作手册说明书

ER系列工业机器人传送带跟随功能操作手册RCS2V2.2南京埃斯顿自动化股份有限公司南京埃斯顿机器人工程有限公司-本文档符合ISO体系要求,并会根据IPD体系变化更新-文档修订记录目录前言 (1)读者对象 (1)注意事项 (1)安全说明 (1)第 1 章概述 (2)第 2 章动坐标系标定 (4)2.1 跟随坐标系关系 (4)2.2 动坐标系标定 (4)2.2.1 直线传送带动坐标系标定 (5)2.2.2 圆盘传送带动坐标系标定 (6)第 3 章配置说明 (7)3.1 传送带参数配置 (7)3.2 脉冲当量标定 (8)3.2.1 直线传送带脉冲当量标定 (9)3.2.2 圆盘传送带脉冲当量标定 (10)3.2.3 脉冲当量验证 (10)3.3 跟随参数配置 (11)3.4 触发参数配置 (11)3.5 视觉参数配置 (13)3.6 虚拟传送带配置 (14)3.7 视觉协议 (15)第 4 章指令说明 (16)4.1 WaitWObj (16)4.2 MovLSync (17)4.3 MovJSyncQuit (18)4.4 MovLSyncQuit (19)4.5 SetTargetPos (20)4.6 SetSyncoord (20)4.7 SynCToUserC (21)4.8 WaitConvDis (21)4.9 SimConveyorOn (22)4.10 SimConveyorOff (22)4.11 ReceiveWObj (22)4.12 ResetWObjBuf (22)4.13 跟随支持的指令集 (23)第 5 章跟随轨迹点位生成 (24)第 6 章现场配置说明 (26)6.1 使用步骤 (26)6.2 场景示例1——使用视觉获取目标点位 (27)6.3 场景示例2——使用非视觉获取特定点位 (28)6.4 场景示例3——相机视野在机器人工作空间外 (30)6.5 场景示例4——使用虚拟传送带 (32)第7 章跟随调试诊断 (34)7.1 EScope跟随数据采集 (34)7.2 跟随信息打印 (34)7.3 跟随状态查看 (35)7.4 跟随丢弃信息显示 (36)7.5 跟随运动性能调试 (37)7.6 跟随常见问题及解决措施 (37)前言本手册适用于控制系统RCS2 V1.28.00,介绍埃斯顿ER 系列机器人传送带跟随功能使用方法。
ABB 常用机器人技术参数

便于集成 安装方式灵活多样:支架式、壁挂式、倾斜式或倒置式。选择 行程为1.2 m的短臂紧凑版本,甚至可以将IRB 1600 内置于机器 中,同时确保最高总负载达36 kg。
可持续性与健康 齿轮摩擦小,QuickMoveTM和TrueMoveTM可避免不必要的运动, 使最高速度时的功耗降低至0.58 kW,速度较低时功耗更小。噪 声水平低于70 dB(A),保证一个良好的低噪音环境。
扩In大cr工ea作se范d 围accessability 机In器te人gra背te负d 线dre缆ss采ing用m集a成kes式th设e计ro,bo使t’s机ou器te人r d占im据en的sio外n部s 空 间s尺ma寸lle相r. 对Th变is e小xt,en当ds机th器e 人rob工ot作sy的st焊em接’s夹re具al 形wo状rk结ing构ra较ng复e,
6
Inte机gr器ate人d 本sig体nal supply6 12 signals on upper arm
Inte外gr部ate设d 备air supply 6 Max. 8 bar on upper arm
集Pe成rfo信rm号an源ce
埃夫特 ER20-1700 工业机器人 快速使用手册说明书

ER20-1700工业机器人快速使用手册埃夫特智能装备股份有限公司服务热线(Tel):400-0528877声明感谢您购买埃夫特机器人产品,为确保已对产品进行正确的设置,请您在使用本产品之前,务必仔细阅读本操作手册。
本声明及手册所提及的内容涉及您的人身及财产安全,若不遵循或不按照手册的说明与警告而擅自操作,可能会给您和周围的人带来人身伤害或给埃夫特机器人或周围的其他物品造成财产损失。
本声明及手册为截至本批次产品出厂前的最新版本,后续请通过访问官方网站以获取更新的信息。
本手册仅作为对产品进行正常操作的指导,在产品使用过程中,埃夫特公司并不对除产品缺陷外的其他原因引发的人身伤害、财产损失承担责任。
埃夫特公司郑重建议:参与机器人操作、示教、维护、维修、点检等相关活动的人员,在学习完毕埃夫特公司准备的培训课程前,请勿赋予其对机器人的操作使用权限。
版本号:V1.1ER20-1700工业机器人快速使用手册目录第1章安全 (1)1.1安全须知 (1)1.2安全准则 (1)第2章搬运与安装 (3)2.1概述 (3)2.2基本说明 (3)2.2.1开箱清单 (3)2.2.2安装前的准备工作 (3)2.2.3机器人储存环境 (4)2.2.4机器人操作环境 (4)2.2.5寒冷环境中启动机器人 (4)2.2.6机器人性能参数表 (5)2.2.7机器人工作空间 (6)2.2.8控制柜工作放置空间 (7)2.3搬运 (7)2.3.1机器人搬运注意事项 (7)2.3.2机器人本体搬运 (8)2.3.3机器人控制柜搬运 (10)2.4安装 (11)2.4.1安全栏的设置 (11)2.4.2机器人安装方法 (11)2.4.3地面安装 (12)2.4.4支架安装 (12)2.4.5倒挂安装 (13)2.4.6安装现场和环境 (13)2.4.7集成应用安装接口 (14)第3章电气连接 (17)3.1机器人电源 (17)3.2机器人动力、信号、接地线缆 (18)3.3控制器本地IO定义 (19)3.4IO模块扩展 (20)3.4.2控制器本地IO扩展 (20)3.4.2控制器远程IO扩展 (21)3.5IO设置 (22)3.5.1更新IO模块 (22)3.5.2远程IO配置 (23)ER20-1700工业机器人快速使用手册3.5.3IO自由配置 (25)3.5.2模拟量IO配置 (29)3.6外部急停简介 (30)3.6.1外部急停 (31)3.6.2急停输出干触点 (31)3.6.3安全门X12 (31)第4章快速操作 (32)4.1示教器 (32)4.1.1关于示教器 (32)4.1.2功能区与接口 (33)4.1.3如何握持示教器 (34)4.2上电启动 (35)4.3点动操作 (35)4.3.1什么是点动操作 (35)4.3.2点动操作注意事项 (36)4.3.3开始点动操作 (36)4.3.4关节坐标系-点动操作 (37)4.4停机断电 (37)第5章安装使用过程中常见故障与排查方法 (38)ER20-1700工业机器人快速使用手册第1章安全1.1安全须知根据国家和当地的有关法律、法规、条例,在使用包括机器人的工业系统时,安全防范是最基本的关注点。
ER系列机器人技术基础 ppt课件
专用输入信号图
We are offeringPPATc课cur件acy & Efficiency!
39
机器人控制系统
专用输出信号包括:系统报警、机器人使能状态、程序执行状态、示教器连 接状态、急停信号状态等。
14
机器人基础知识
1. 机器人的系统组成
示教器 控制柜 机械本体 外围设备
We are offeringPPATc课cur件acy & Efficiency!
15
机器人基础知识
机器人核心部件
控制器
伺服驱动器
交流伺服电机
高精密减速机
机械本体
We are offeringPPATc课cur件acy & Efficiency!
We are offeringPPATc课cur件acy & Efficiency!
18
机器人基础知识
2.2 关节坐标系(Joint) 机器人各轴进行单独动作,称关节坐标系。设定关节坐标系时,机器人的A1、 A2、A3、A4 、A5、A6各轴分别运动,关节坐标系下各轴运动方向如下图所示:
轴名称 A1 A2 A3 A4 A5 A6
16
机器人基础知识
2. 机器人坐标系
TCP 关节坐标系(Joint) 直角坐标系(World) 工具坐标系(Tool) 用户坐标系( USER )
We are offeringPPATc课cur件acy & Efficiency!
17
机器人基础知识
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最详细的ER1机器人介绍
作者:Ricky 文章来源:更新时间:2006年04月11日打印此文浏
览数:14133
ER1(Evolution Robot)是美国Evolution 公司的第一代开放式移动机器人平台。
从它的299美元的零售价来说,这可以说是目前拥有相同功能的同类产品中最便宜的机器人系统了。
但是基本的ER1的套装是不包括控制系统的,也就是说,你得额外支付一笔控制系统得开销。
一般ER1推荐使用笔记本电脑来作为控制系统,这样一来,整个机器人得成本就会大大得上升,但是我们可以通过购买mini pc来做为它得控制系统,这样整体成本就能下降一点.
第一篇:硬件篇
在这一篇中,介绍ER1包括了哪些组件
1)一个可充电电池+充电器
电池可以提供12V,5.4AH的容量,实际试用,如果用单个电池来驱动机器人的话,一次充满可以正常运行1个半小时左右。
你还可以用2组电池并联,这样就能提供长的多的运行时间了。
2) 驱动控制器
这个驱动器是这个机器人套件硬件部分的核心组件,所有控制都通过它来实现。
首先,控制器通过USB口和控制电脑相连,步进电机也是直接接到这个驱动器上。
这个驱动
器的作用就是将控制指令转换为实际电机运行的电脉冲。
同时它还有一个数字输入口和一个模拟输入口,如果你有自己做的传感器套件也可以接在这个控制器上。
3) 2个步进电机
这是机器人的驱动力了。
4)一个Web 摄像头
由于这个机器人是靠视觉进行控制的,所以这个摄像头就是机器人唯一的输入了。
所有机器人的定位啊,导航啊,人脸识别都通过这个摄像头传到控制软件里。
在实际应用中,由于一个摄像头安装的位置关系,需要两个摄像头才能比较好的完成一些任务。
其中一个用来做目标识别,另外一个作为壁障导航的。
基本上多数USB 接口的摄像头都能兼容。
省略别的昂贵的传感器,也是这个套件如此廉价的一个原因之一了。
5)一套铝制构件,用来制作底盘
这就是一套铝制的小积木,大家可以充分发挥想象力和创造力来搭建出不同的机器人系统。
所有的安装都是这么简单,以至于站长在2小时内试装了3套不同的组合。
6)一套RCC (Robot Control Center) 控制软件
这套软件是这个机器人套装中的灵魂,所有的控制都要通过它来实现。
可别小瞧了这套软件,这套软件集成了目前机器人领域最新的研究成果,其中包括动态视觉视觉,和基于行为的控制模式。
详细情况将在后面介绍。
9)完成的ER1
根据自己想象完成ER1的机械构架之后,我们需要将ER1的电源,步进电机等连接起来。
由于采用了模块化设计,使得整个ER1的电器连接相当简单,在笔记本电脑上安装好RCC软件;将RCM和摄像头通过USB接入笔记本;连接电源,步进电机至RCM。
一个基本的ER1系统就诞生了。
如果额外付300美金就可以得到3大附件了。
他们是一个机械手臂,一组红外距离探头,和额外的扩展包。
10)机械手这个机械手的掌心部分有一组压力传感器,当压力大于一个预先设定的阀值以后,机械手会自动停止握紧。
这个可以让机械手获得合适的摩擦力,不会因为压力不够使物体滑落,也不会因为压力过大对物体产生伤害。
实际实验,发现这个手的握紧力还是比较合适的,用来拿个杯子什么的不要担心杯子会掉下去的。
11)红外探头这组红外探头通过usb接口直接连接到控制电脑上,可以通过RCC软件来设定传感器的系列参数。
12)扩展包
包括额外的两个轮子,和一组铝制结构件。
通过这些组件,你可以给你的
ER1设计出更多造型。
13)加装扩展包以后的ER1
第二篇:软件篇
ER1的控制软件RCC(Robot Control Center) 可以识别物体,颜色,声音,可以发出语音提示,自动播放音乐,自动行走或者通过遥控方式控制机器人的移动,还可以通过程序来让机器人自动摄影和录音,并将这些资料通过internet自动上传到你的email 地址,看上去真的很酷哦。
但是实际上呢? 我们来看看这个软件到底为什么会具有如此强大的功能。
1)图像识别
这套软件最大的进步和特色也就是这个图像识别技术了,在一套如此便宜的套件中,竟然包括如此出色的图像识别软件是整个系统最大的特点之一。
只要事先让软件“看”过一边要识别的物体,软件就可以很轻松的对它进行识别,当然在软件第一次“看”物体的时候,要告诉物体和摄像头之间的距离。
由于不是立体摄像头没法通过图像比较来得出被测物体和摄像机之间的物理距离,所以这个距离参数是必须定义的。
其它所有功能都是以这个图像识别技术为前提的。
2)语音识别熟悉windows系统想必知道windows 2000以上版本就自带语音识别系统,这套软件也是利用了现成的windows xp内置的语音识别技术,所以这里也就忽略不提了。
有兴趣可以参考一下windows帮助文件。
3)基于行为的控制模式
什么是基于行为呢?简单的来说就是将一个复杂的任务是由一个个单独的行为组成的,比如“去大厅给我拿可乐”这个任务其实是由“去大厅”+“拿可乐”+“回来”这三个行为构成的。
而“拿可乐”这个行为又有“识别可乐”+“移动到可乐前面”+“移动机械手到可乐位置”+抓紧可乐“这几个更小的基本行为构成。
也就是如果你需要机器人能够执行比较复杂的任务,你得分别定义好每个行为的发生条件,执行过程。
在这套软件中,你可以一共定义288个行为,你可以将这些行为组合在一起形成很复杂的行为,也可以单独执行这些你自己定义的行为。
最简单的比如“问候”这个行为可以由“人脸识别“+”朗读问候语“这2个子行为组成。
其实,目前世界上多数智能机器人都是由这种控制模式控制的。
比如博物馆的接待机器人。
4) API Socket 接口
通过这个功能,你就可以绕开RCC软件的行为定义,通过自己的程序来直接控制机器人。
一般对于做上层算法研究的可以用这个功能进行算法验证。
再第三篇(改装篇)中会有更加详细的论述。
通过socket接口,你可以发类似“move 30 cm”的指令给机器人,你不需要考虑具体电机的运转情况,机器人就会往前移动30cm,这样其实就真正做到了硬件无关性。
个人觉得这是今后机器人软件开发上的趋势,在你开发的机器人控制软件只要预留这样的接口,就可以应用在有相同接口功能机器人上了。