51单片机模拟 SPI 总线的方法
MC51 AVR MCU 的I2C、SPI、232、485、IO的使用

MC51\AVR MCU 的I2C\SPI\232\485\IO的使用首先:AVR的IO口操作玉日信有三个寄存器:DDR xn PORTxn PINxnDD Rxn(方向选择):1为输出0为输入PORTxn:在引脚为输入的前提下,为1上啦电阻使能0不使能在引脚为输出的前提下,为1输出高电平0输出低电平PINxn:通过读取PINxn来得到该引脚的状态,他不会所存状态,他读到的只是当前管脚的电平状态。
注意:xn是 A B CD..口管脚设置PA口的第一个脚为输出:DDRA|=0x01;51单片机的IO口操作比如现让P1.7为输出,其余为输入,P2=0x0111 1111B,也就是0x7F。
=============================================================一、模拟SPI的使用时钟是100KHZ这样延时3微妙一周期6微妙这样最大传输速度为输入时钟频率的1/8CS输出低电平→MOSI与1向与→CLK输出一个脉冲→MOSI的数据右移动一位与1相与→ CLK输出一个脉冲……输出够8位(一个字节了)再下一个字节或者停止→停止之后CS拉高CS输出低电平→ CLK输出一个脉冲→MISO管脚取数据→ CLK输出一个脉冲→MISO管脚取数据→ CLK输出一个脉冲……输入够8位(一个字节了)再下一个字节或者停止→停止之后CS拉高3、一个主机和多个从器件的通信系统。
(2)3个既可以当做主机也可以当做从机的单片机组成的系统。
特点:SPI是一位一位发送的,并允许暂停,发多少位都行,不用寻址操作AVR有SPI功能接口的单片机SPI操作时钟是最大1/4 FOSC 最小1/128 FOSC把数据写到数据寄存器→CS拉低(启动一次通信)→再把数据写到数据寄存器→CS拉低(启动一次通信)→CS拉高结束通信注意:是时钟的上升沿还是下降沿有效时可以设置的---CPHA为1上升沿采样数据,为0下降沿采样数据,传输结束了SPIF会置位高位还是地位先发送是可以设置的----DORD为1地位先发送为0高位先发送数据寄存器SPFR是可读可写的—写数据进去就启动数据传输,读数据将读取数据的接收缓存区在主模式下,时钟信号的1次作用对应一位数据的发送(MOSI)和另一位数据的接收(MISO)。
51单片机模拟spi串行接口程序

51 单片机模拟spi 串行接口程序51 单片机模拟spi 串行接口程序,在keilc51 下编写sbit CS=P3A5;sbit CLK= P"5;sbit DataI=P1A7;sbit DataO=P1A6;#define SD_Disable() CS=1 // 片选关#define SD_Enable() CS=0 // 片选开unsigned char SPI_TransferByte(unsigned char val){unsigned char BitCounter;for(BitCounter=8; BiCounter!=0; BitCounter--){ CLK=0;DataI=0; // write if(val&0x80) DataI=1;val<<=1;CLK=1;if(DataO)val|=1; // read}CLK=0;return val;}sbit CLK= P1A5;sbit DataI=P1A7;sbit DataO=P1A6;#define SD_Disable() CS=1 // 片选关#define SD_Enable() CS=0 // 片选开unsigned char SPI_TransferByte(unsigned char val){unsigned char BitCounter;for(BitCounter=8; BiCounter!=0; BitCounter--){ CLK=0;DataI=0; // write if(val&0x80) DataI=1;val<<=1;CLK=1;if(DataO)val|=1; // read}CLK=0;return val;}sbit CLK= P1A5; sbit DataI=P1A7;sbit DataO=P1A6;#define SD_Disable() CS=1 // 片选关#define SD_Enable() CS=0 // 片选开unsigned char SPI_TransferByte(unsigned char val) { unsigned char BitCounter;for(BitCounter=8; BiCounter!=0; BitCounter--){ CLK=0;DataI=0; // writeif(val&0x80) DataI=1;val<<=1;CLK=1;if(DataO)val|=1; // read}CLK=0;return val;}sbit CLK= P1A5;sbit DataI=P1A7;sbit DataO=P1A6;#define SD_Disable() CS=1 // 片选关#define SD_Enable() CS=0 // 片选开unsigned char SPI_TransferByte(unsigned char val) { unsigned char BitCounter;for(BitCounter=8; BiCounter!=0; BitCounter--){ CLK=0;DataI=0; // writeif(val&0x80) DataI=1;val<<=1;CLK=1;if(DataO)val|=1; // read}CLK=0;return val;}sbit CLK= P1A5;sbit Datal=P1A7;sbit DataO=P1A6;#define SD_Disable() CS=1 // 片选关#define SD_Enable() CS=0 // 片选开unsigned char SPl_TransferByte(unsigned char val) unsigned char BitCounter;for(BitCounter=8; BiCounter!=0; BitCounter--){ CLK=0;DataI=0; // writeif(val&0x80) DataI=1;val<<=1;CLK=1;if(DataO)val|=1; // read}CLK=0;return val;}sbit CLK= P1A5;sbit Datal=P1A7;sbit DataO=P1A6;#define SD_Disable() CS=1 // 片选关#define SD_Enable() CS=0 // 片选开unsigned char SPl_TransferByte(unsigned char val) { unsigned char BitCounter;for(BitCounter=8; BiCounter!=0; BitCounter--){ CLK=0;DataI=0; // write if(val&0x80) DataI=1;val<<=1;CLK=1;if(DataO)val|=1; // read}CLK=0;return val;}sbit CLK= P1A5;sbit Datal=P1A7;sbit DataO=P1A6;#define SD_Disable() CS=1 // 片选关#define SD_Enable() CS=0 // 片选开unsigned char SPl_TransferByte(unsigned char val) { unsigned char BitCounter;for(BitCounter=8; BiCounter!=0; BitCounter--){ CLK=0;Datal=0; // writeif(val&0x80) Datal=1;val<<=1;CLK=1;if(DataO)val|=1; // read}CLK=0;return val;}sbit CLK= P1A5;sbit Datal=P1A7;sbit DataO=P1A6;#define SD_Disable() CS=1 // 片选关#define SD_Enable() CS=0 // 片选开unsigned char SPl_TransferByte(unsigned char val) { unsigned char BitCounter;for(BitCounter=8; BiCounter!=0; BitCounter--){ CLK=0;Datal=0; // writeif(val&0x80) Datal=1;val<<=1;CLK=1;if(DataO)val|=1; // readCLK=0;return val;}sbit CLK= P1A5;sbit Datal=P1A7;sbit DataO=P1A6;#define SD_Disable() CS=1 // 片选关#define SD_Enable() CS=0 // 片选开unsigned char SPl_TransferByte(unsigned char val) { unsigned char BitCounter;for(BitCounter=8; BiCounter!=0; BitCounter--){ CLK=0;Datal=0; // writeif(val&0x80) Datal=1;val<<=1;CLK=1;if(DataO)val|=1; // read}CLK=0;return val;。
基于SPI总线的51单片机多机互连编程技术

基于SPI总线的51单片机多机互连编程技术李强;潘启军【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2012(12)7【摘要】Serial expansion and serial communication become the mainstream way of current MCU system expansion. The microcontroller market has not only traditional UART serial interfaces,but also SPI,I2C bus serial interfaces. SPI interface is a high-speed serial com- munication interface , and it is particularly for high-speed communication between MCU. But the work mode is very different from the traditional UART serial communication. This paper introduces all kinds of serial communication work mode's configuration and driver programming, and shows the integral test.%串行扩展和串行通信方式已经成为当前单片机系统扩展的主流方式。
目前单片机市场上不但有传统的UART串行接口,而且还有SPI、I2C总线等串行接口。
SPI接口是一种高速串行通信接口,特别适合于单片机之间的高速通信,但其工作方式较之传统的UART串行通信方式有很大的不同。
本文给出SPI接口基础上的各种串行通信工作方式配置及驱动编程,并进行完整的测试。
【总页数】3页(P24-26)【作者】李强;潘启军【作者单位】韶关学院计算机科学学院,韶关512000;韶关光栅测量控制技术研究所【正文语种】中文【中图分类】TP314【相关文献】1.基于SPI的CAN总线控制器与MCS-51单片机的接口设计 [J], 谢桂波2.51单片机综合学习系统——SPI总线的基本原理与应用实例 [J], 庄建清;徐玮3.SPI总线在51单片机系统中的实现 [J], 万江4.Intel 8098/8051单片机的多机互连方案的研究 [J], 刘鲁源;么莉;王欣东5.基于AT89C51单片机的CAN总线的多机通信 [J], 刘永富因版权原因,仅展示原文概要,查看原文内容请购买。
单片机与外部设备的SPI接口设计与实现

单片机与外部设备的SPI接口设计与实现1.引言单片机与外部设备的通信是嵌入式系统设计中的重要环节。
SPI(Serial Peripheral Interface)是一种常用的串行通信协议,用于实现单片机与外设之间的数据传输。
本文将探讨单片机与外部设备之间的SPI接口设计与实现。
2.SPI接口简介SPI接口是一种同步的数据总线协议,通常由一个主设备和一个或多个从设备组成。
SPI接口包含四个信号线:时钟线(SCK)、主输出从输入线(MISO)、主输入从输出线(MOSI)和片选线(SS)。
通过时钟线的同步操作,主设备可以与从设备进行双向数据传输。
3.SPI接口的工作原理SPI接口的工作原理如下:首先,主设备通过片选线选择从设备,并将数据发送到MOSI线上;随后,主设备通过时钟线提供时钟信号,从而同步数据的传输;同时,从设备将数据通过MISO线发送给主设备;最后,主设备将片选线置高,表示数据传输结束。
4.SPI接口的硬件设计在实现SPI接口的硬件设计时,需要考虑以下几个方面:4.1 片选线的设计片选线的数量由从设备的数量决定。
如果只有一个从设备,可以直接连接到片选线上。
如果有多个从设备,需要使用多个片选线,并通过逻辑门进行选择。
4.2 时钟线的设计时钟线的频率由主设备的时钟频率决定。
需要根据从设备的要求,选择适当的时钟频率。
时钟频率过高可能导致数据传输出错,过低可能导致传输速度较慢。
4.3 数据线的设计数据线包括主输出从输入线(MISO)和主输入从输出线(MOSI)。
需要根据从设备的要求,确定数据线的数量和宽度。
通常,每个从设备都需要一个MISO线和一个MOSI线。
5.SPI接口的软件实现在单片机中实现SPI接口的软件需要编写相应的驱动程序。
以下是SPI接口软件实现的基本步骤:5.1 硬件初始化首先,需要初始化单片机的IO口,并设置片选线等相应的引脚。
5.2 时钟设置根据从设备的时钟要求,设置单片机相应的时钟频率。
SPI总线在51系列单片机系统中的实现(一)

SPI总线在51系列单片机系统中的实现(一)摘要:MCS51系列、MCS96系列等单片机由于都不带SPI串行总线接口而限制了其在SPI总线接口器件的使用。
文中介绍了SPI串行总线的特征和时序,并以串行E2PROM为例,给出了在51系列单片机上利用I/O口线实现SPI串行总线接口的方法和软件设计程序。
关键词:单片机SPI串行总线总线接口1引言SPI(SerialPeripheralInterface--串行外设接口)总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOST和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
由于SPI系统总线一共只需3~4位数据线和控制即可实现与具有SPI总线接口功能的各种I/O器件进行接口,而扩展并行总线则需要8根数据线、8~16位地址线、2~3位控制线,因此,采用SPI总线接口可以简化电路设计,节省很多常规电路中的接口器件和I/O口线,提高设计的可靠性。
由此可见,在MCS51系列等不具有SPI接口的单片机组成的智能仪器和工业测控系统中,当传输速度要求不是太高时,使用SPI总线可以增加应用系统接口器件的种类,提高应用系统的性能。
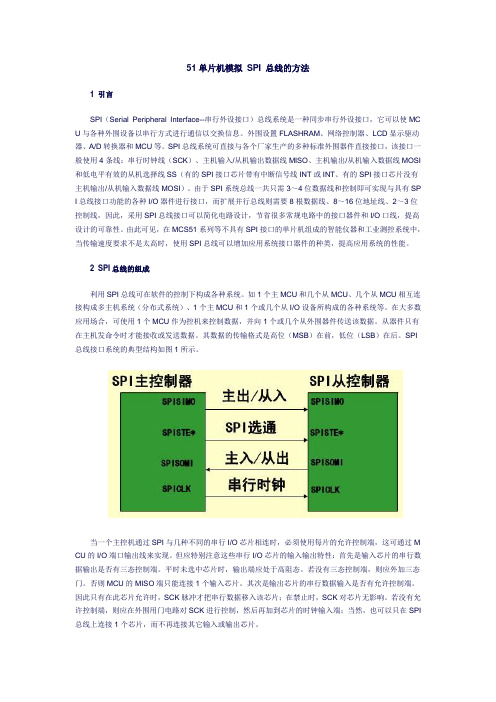
2SPI总线的组成利用SPI总线可在软件的控制下构成各种系统。
如1个主MCU和几个从MCU、几个从MCU相互连接构成多主机系统(分布式系统)、1个主MCU和1个或几个从I/O设备所构成的各种系统等。
在大多数应用场合,可使用1个MCU作为控机来控制数据,并向1个或几个从外围器件传送该数据。
(完整)spi总线协议详细说明
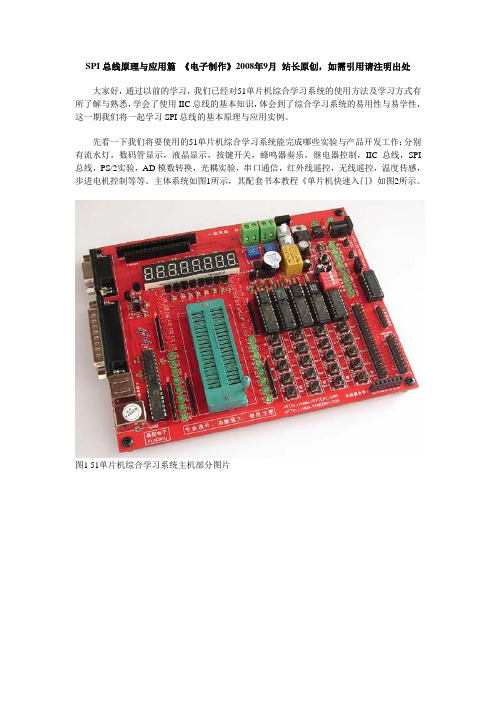
SPI总线原理与应用篇《电子制作》2008年9月站长原创,如需引用请注明出处大家好,通过以前的学习,我们已经对51单片机综合学习系统的使用方法及学习方式有所了解与熟悉,学会了使用IIC总线的基本知识,体会到了综合学习系统的易用性与易学性,这一期我们将一起学习SPI总线的基本原理与应用实例。
先看一下我们将要使用的51单片机综合学习系统能完成哪些实验与产品开发工作:分别有流水灯,数码管显示,液晶显示,按键开关,蜂鸣器奏乐,继电器控制,IIC总线,SPI 总线,PS/2实验,AD模数转换,光耦实验,串口通信,红外线遥控,无线遥控,温度传感,步进电机控制等等。
主体系统如图1所示,其配套书本教程《单片机快速入门》如图2所示。
图1 51单片机综合学习系统主机部分图片图2 51单片机综合学习系统配套书本教程——《单片机快速入门》上图是我们将要使用的51单片机综合学习系统硬件平台,如图1所示,本期实验我们用到了综合系统主机、板载的AT93C46芯片,综合系统其它功能模块原理与使用详见前几期《电子制作》杂志及后期连载教程介绍。
SPI总线简介SPI总线基本概念SPI ( Serial Peripheral Interface ———串行外设接口) 总线是Motorola公司推出的一种同步串行接口技术。
SPI总线系统是一种同步串行外设接口,允许MCU 与各种外围设备以串行方式进行通信、数据交换。
外围设备包括FLASHRAM、A/ D 转换器、网络控制器、MCU 等。
SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,正是出于这种简单易用的特性,现在越来越多的芯片集成了这种通信协议。
其工作模式有两种:主模式和从模式。
SPI是一种允许一个主设备启动一个从设备的同步通讯的协议,从而完成数据的交换。
也就是SPI是一种规定好的通讯方式。
这种通信方式的优点是占用端口较少,一般4根就够基本通讯了(不算电源线)。
51单片机模拟 SPI 总线的方法
51单片机模拟SPI 总线的方法1 引言SPI(Serial Peripheral Interface--串行外设接口)总线系统是一种同步串行外设接口,它可以使MC U与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI 和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
由于SPI系统总线一共只需3~4位数据线和控制即可实现与具有SP I总线接口功能的各种I/O器件进行接口,而扩展并行总线则需要8根数据线、8~16位地址线、2~3位控制线,因此,采用SPI总线接口可以简化电路设计,节省很多常规电路中的接口器件和I/O口线,提高设计的可靠性。
由此可见,在MCS51系列等不具有SPI接口的单片机组成的智能仪器和工业测控系统中,当传输速度要求不是太高时,使用SPI总线可以增加应用系统接口器件的种类,提高应用系统的性能。
2 SPI总线的组成利用SPI总线可在软件的控制下构成各种系统。
如1个主MCU和几个从MCU、几个从MCU相互连接构成多主机系统(分布式系统)、1个主MCU和1个或几个从I/O设备所构成的各种系统等。
在大多数应用场合,可使用1个MCU作为控机来控制数据,并向1个或几个从外围器件传送该数据。
从器件只有在主机发命令时才能接收或发送数据。
其数据的传输格式是高位(MSB)在前,低位(LSB)在后。
SPI 总线接口系统的典型结构如图1所示。
当一个主控机通过SPI与几种不同的串行I/O芯片相连时,必须使用每片的允许控制端,这可通过M CU的I/O端口输出线来实现。
但应特别注意这些串行I/O芯片的输入输出特性:首先是输入芯片的串行数据输出是否有三态控制端。
51单片机模拟串口的三种方法
51单片机模拟串口的三种方法单片机模拟串口是指通过软件实现的一种串口通信方式,主要应用于一些资源有限的场合,如单片机中没有硬件UART模块的情况下。
下面将介绍三种常用的单片机模拟串口的方法。
1.轮询法轮询法是最简单的一种模拟串口方法,其原理是通过轮询方式不断查询接收和发送的数据。
在接收数据时,单片机通过忙等待的方式查询接收端是否有数据到达,并且处理数据。
在发送数据时,单片机通过检查发送端是否空闲,然后发送数据。
这种方法的优点是实现简单,占用资源少。
缺点是轮询过程可能会浪费一定的时间,同时由于忙等待可能会占用CPU资源,影响其他任务的执行。
2.中断法中断法是一种基于中断机制实现的模拟串口方法,其原理是通过外部中断或定时器中断触发,单片机响应中断并进行串口数据的接收和发送。
在接收数据时,单片机通过外部中断或定时器中断来检测串口接收中断,并处理接收到的数据;在发送数据时,单片机通过定时器中断来定时发送数据。
这种方法的优点是能够及时响应串口的数据接收和发送,不会浪费过多的时间。
缺点是中断处理可能会占用一定的CPU资源,同时中断嵌套可能会引起一些问题。
3.环形缓冲法环形缓冲法是一种基于环形缓冲区的模拟串口方法,其原理是通过环形缓冲区来缓存接收和发送的数据。
在接收数据时,单片机将串口接收到的数据放入环形缓冲区,并使用指针指示当前读取位置和写入位置,然后通过轮询或中断方式从缓冲区中读取数据并进行处理;在发送数据时,单片机将要发送的数据放入环形缓冲区,并通过轮询或中断方式从缓冲区中读取数据并发送。
这种方法的优点是能够有效地处理串口数据的接收和发送,不会浪费过多的时间,并且能够缓存一定量的数据。
缺点是需要额外的缓冲区,占用一定的内存空间。
综上所述,通过轮询法、中断法和环形缓冲法三种方法,可以实现单片机的串口模拟功能。
根据实际需求,选择合适的方法来实现串口通信。
(单片机原理与应用实验)实验12SPI总线接口

本实验介绍SPI总线接口的工作原理、通信原理、接口电路、数据传输操作、 实验过程,以及可能遇到的问题和解决方法,最后总结实验心得。
SPI总线简介
SPI(Serial Peripheral Interface)总线是一种串行通信协议,用于在微控制器和外部设备之间进 行高速、全双工的数据传输。
实验中可能遇到的问题及解决方法
1 通信错误
检查硬件连接和程序逻辑,确保信号线连接正确,程序没有错误。
2 时序问题
调整时钟频率和时钟相位,保证主设备和从设备之间的时序匹配。
总结和实验心得
通过本次实验,我深入了解了SPI总线的工作原理和通信过程,并掌握了如何 使用SPI总线进行数据传输的方法。这对我今后的嵌入式系统开发有很大帮助。
SPI总线通信原理
SPI总线通过四条信号线进行通信,包括时钟信号、主设备输出(MOSI)信号、主设备输入(MISO) 信号以及片选信号(SS)。数据在通信时通过时钟信号同步传输。
SPI总线接口电路
SPI总线接口通常由一个主设备和一个或多个从设备组成。主设备控制通信时 序,并发送和接收数据。从设备响应主设备的操作,并进行数据传输。
SPI总线数据传输操作
数据传输过程包括主设备生成时制。
SPI总线实验过程
1
2. 程序编写
2
编写单片机程序以控制SPI总线的数
据传输。
3
1. 实验准备
连接电路,准备实验所需的器件和材 料。
3. 实验测试
进行SPI总线的数据传输测试,观察 结果和信号波形。
51单片机模拟串口的三种方法

随着单片机的使用日益频繁,用其作前置机进行采集和通信也常见于各种应用,一般是利用前置机采集各种终端数据后进行处理、存储,再主动或被动上报给管理站。
这种情况下下,采集会需要一个串口,上报又需要另一个串口,这就要求单片机具有双串口的功能,但我们知道一般的51系列只提供一个串口,那么另一个串口只能靠程序模拟。
本文所说的模拟串口,就是利用51的两个输入输出引脚如P1.0和P1.1,置1或0分别代表高低电平,也就是串口通信中所说的位,如起始位用低电平,则将其置0,停止位为高电平,则将其置1,各种数据位和校验位则根据情况置1或置0。
至于串口通信的波特率,说到底只是每位电平持续的时间,波特率越高,持续的时间越短。
如波特率为9600BPS,即每一位传送时间为1000ms/9600=0.104ms,即位与位之间的延时为为0.104毫秒。
单片机的延时是通过执行若干条指令来达到目的的,因为每条指令为1-3个指令周期,可即是通过若干个指令周期来进行延时的,单片机常用11.0592M的的晶振,现在我要告诉你这个奇怪数字的来历。
用此频率则每个指令周期的时间为(12/11.0592)us,那么波特率为9600BPS每位要间融多少个指令周期呢?指令周期s=(1000000/9600)/(12/11.0592)=96,刚好为一整数,如果为4800BPS则为96x2=192,如为19200BPS则为48,别的波特率就不算了,都刚好为整数个指令周期,妙吧。
至于别的晶振频率大家自已去算吧。
现在就以11.0592M的晶振为例,谈谈三种模拟串口的方法。
方法一:延时法通过上述计算大家知道,串口的每位需延时0.104秒,中间可执行96个指令周期。
#define uchar unsigned charsbit P1_0 = 0x90;sbit P1_1 = 0x91;sbit P1_2 = 0x92;#define RXD P1_0#define TXD P1_1#define WRDYN 44 //写延时#define RDDYN 43 //读延时//往串口写一个字节void WByte(uchar input){uchar i=8;TXD=(bit)0; //发送启始位Delay2cp(39);//发送8位数据位while(i--){TXD=(bit)(input&0x01); //先传低位Delay2cp(36);input=input>>1;}//发送校验位(无)TXD=(bit)1; //发送结束位Delay2cp(46);}//从串口读一个字节uchar RByte(void){uchar Output=0;uchar i=8;uchar temp=RDDYN;//发送8位数据位Delay2cp(RDDYN*1.5); //此处注意,等过起始位while(i--){Output >>=1;if(RXD) Output |=0x80; //先收低位Delay2cp(35); //(96-26)/2,循环共占用26个指令周期}while(--temp) //在指定的时间内搜寻结束位。
单片机IO口模拟SPI四种模式的程序

单片机IO口模拟SPI四种模式的程序单片机IO口模拟SPI四种模式的程序#include "iom8535v.h"#define _CPOL 1#define _CPHA 0#define SCK_IO DDRA|=0X01#define MOSI_IO DDRA|=0X02#define MISO_IO DDRA&=0XFB#define SSEL_IO DDRA|=0X08#define SCK_D(X) (X?(PORTA|=0X01):(PORTA&=0XFE)) #define MOSI_D(X) (X?(PORTA|=0X02):(PORTA&=0XFD)) #define SSEL_D(X) (X?(PORTA|=0X08):(PORTA&=0XF7))#define MISO_I() (PINA&0X04)void delay(){unsigned char m,n;for(n=0;n<5;n++);for(m=0;m<100;m++);}/************************************************ 端口方向配置与输出初始化************************************************/ void SPI_Init(void){SCK_IO ;MOSI_IO ;MISO_IO ;SSEL_IO ;SSEL_D(1);MOSI_D(1);#if _CPOL==0SCK_D(0);#elseSCK_D(1);#endif}/**********************************************模式零写数据***********************************************/ #if _CPOL==0&&_CPHA==0 //MODE 0 0 void SPI_Send_Dat(unsigned char dat){unsigned char n;for(n=0;n<8;n++){SCK_D(0);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(1);}SCK_D(0);}/********************************************* 模式零读数据*********************************************/ unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;for(n=0;n<8;n++)SCK_D(0);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(1);}SCK_D(0);return dat;}#endif/********************************************** 模式二写数据***********************************************/ #if _CPOL==1&&_CPHA==0 //MODE 1 0 void SPI_Send_Dat(unsigned char dat){unsigned char n;for(n=0;n<8;n++){SCK_D(1);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(0);}SCK_D(1);}/********************************************* 模式二读数据*********************************************/ unsigned char SPI_Receiver_Dat(void)unsigned char n ,dat,bit_t;for(n=0;n<8;n++){SCK_D(1);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(0);}SCK_D(1);return dat;}#endif/********************************************* 模式一写数据*********************************************/ #if _CPOL==0&&_CPHA==1 //MODE 0 1 void SPI_Send_Dat(unsigned char dat){unsigned char n;SCK_D(0);for(n=0;n<8;n++){SCK_D(1);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(0);}}/********************************************* 模式一读数据*********************************************/ unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;for(n=0;n<8;n++){SCK_D(1);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(0);}SCK_D(0);return dat;}#endif//////////////////////////////////////////////////////////////////////////////////////////////////////////////#if _CPOL==1&&_CPHA==1 //MODE 1 1void SPI_Send_Dat(unsigned char dat){unsigned char n;SCK_D(1);for(n=0;n<8;n++){SCK_D(0);if(dat&0x80)MOSI_D(1);else MOSI_D(0);dat<<=1;SCK_D(1);}}/************************************模式三读数据************************************/unsigned char SPI_Receiver_Dat(void){unsigned char n ,dat,bit_t;SCK_D(0);for(n=0;n<8;n++){ SCK_D(0);dat<<=1;if(MISO_I())dat|=0x01;else dat&=0xfe;SCK_D(1);}SCK_D(1);return dat;}#endif/**************************************************************************/ void main() {SPI_Init();DDRB = 0XFF;//#if _CPOL//SCK_D(0);//#endifwhile(1){//SSEL_D(0);//SPI_Send_Dat(0x01);//SPI_Send_Dat(0x31);//SSEL_D(1);SSEL_D(0);SPI_Send_Dat(0x81); PORTB =SPI_Receiver_Dat(); SSEL_D(1);//delay();}}。
51单片机SD卡SPI模式操作_1568
【51单片机SD卡SPI模式操作】摘要:sd卡有两种接口模式,一种是sd模式,另一种是spi模式。
在spi模式下,有六根接口线与主机相连,5V电平的51单片机通过电平转换可与3.3V电平的sd卡相连接。
51单片机没有专门的spi总线,可以用51单片机的IO口来模拟spi总结时序。
主机与sd卡的数据交换主要通过命令来实现,通过发送cmd0命令对sd卡进行复位,发送命令cmd1实现sd卡的spi模式初始化。
cmd17、cmd18命令是sd卡的读写扇区命令,对sd卡的操作是严格按照时序进行的。
关键词:sd卡;spi接口;时序sd卡以其大容量、低成本、携带方便、存储数据简单和安全可靠性高被大量应用于数码电子设备中,比如数码相机、数码摄像机、mp3、pda、电子学习机、电子图书等。
对sd卡的操作有复位、初始化、读写等,下面以本人掌握的材料对sd卡的操作进行分析。
一、sd卡的结构sd卡的外形与接口如图1,它有9个接点与主机相连,其接口端定义如表1所示。
sd卡有两种操作模式,一种是sd模式,另一种是spi模式,不同模式下端口的定义不同。
SD模式有一个时钟线、一个命令/反馈线、四根输入/输出信号线、两个电源地和一个电源,所有九根线都有定义,数据传输速率较快。
SPI模式只用到CS片选、数据输入、数据输出、时钟、电源地及电源六根线。
SPI模式较SD模式速度较慢,但很多单片机都有专用的SPI总线,可与sd卡直接相连,使用方便。
SD卡的内部结构如图2所示,主要有四部分组成,一是接口电路,共有九个接口电路,定义如表1所示。
二是接口控制电路,所有操作都由该控制电路具体去执行。
三是内部寄存器组OCR、CID、RCA等。
四是存储数据的存储单元。
接口电路通过控制电路与内部寄存器组成存储单元交换数据,其主要操作有写命令、读数据、写数据、读状态等。
二、sd卡的命令格式sd卡的命令格式固定为6个字节48个位,其格式如图3所示。
开始位固定为0,第二位固定为1,表示主机给sd卡的命令,然后是6位命令索引号,索引号的大小与索引号数字相同,比如cmd0的索引号为000000,索引号41为101001。
#基于51单片机的SPI总线
基于51单片机的SPI总线基于51单片机的SPI总线单片机和其它芯片或设备之间的数据传输在单片机的使用中具有重要的地位,单片机本身的数据传输接口过去主要为8位并行数据接口或异步串行通信接口,但电子技术的迅速发展使得许多新的数据传输接口标准不断涌现,大多数的51单片机并没有在硬件中集成这些新的数据传输接口。
SPI(Serial Peripheral Interface)总线是由Motorola公司提出的一种同步串行外围接口,采用三或四根信号线。
51单片机一般并没有在硬件中集成这种新的接口,所以要用软件来进行模拟。
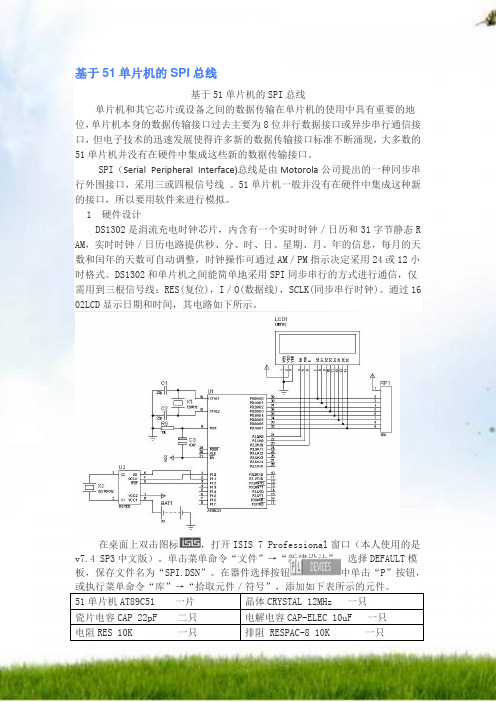
1 硬件设计DS1302是涓流充电时钟芯片,内含有一个实时时钟/日历和31字节静态R AM,实时时钟/日历电路提供秒、分、时、日、星期、月、年的信息,每月的天数和闰年的天数可自动调整,时钟操作可通过AM/PM指示决定采用24或12小时格式。
DS1302和单片机之间能简单地采用SPI同步串行的方式进行通信,仅需用到三根信号线:RES(复位),I/O(数据线),SCLK(同步串行时钟)。
通过16 02LCD显示日期和时间,其电路如下所示。
在桌面上双击图标,打开ISIS 7 Professional窗口(本人使用的是v7.4 SP3中文版)。
单击菜单命令“文件”→“新建设计”,选择DEFAULT模板,保存文件名为“SPI.DSN”。
在器件选择按钮中单击“P”按钮,或执行菜单命令“库”→“拾取元件/符号”,添加如下表所示的元件。
51单片机AT89C51 一片晶体CRYSTAL 12MHz 一只瓷片电容CAP 22pF 二只电解电容CAP-ELEC 10uF 一只电阻RES 10K 一只排阻 RESPAC-8 10K 一只1602液晶显示器 LM016L 一只晶体CRYSTAL 32.768KHz 一只时钟芯片DS1302 一片电池BATTERY 3V 一只若用Proteus软件进行仿真,则上图中的两只晶体、U1的复位电路和U1的31脚以及电池都可以不画,它们大都是默认的。
MCS-51与SPI串行接口语音芯片连接

图13-2 SPI端口控制寄存器位及含义
实验13 MCS-51与SPI串行接口语音芯片连接 1) 放音过程 (1) 执行上电命令(POWER UP)。 (2) 延迟等待,上电结束(当采样频率为8 kHz时,上电延
迟时间约为25 ms)。
(3) 执行“SET PLAY”命令,设置放音段起始地址。
录音、放音段起始地址与每段最短时间及放音长度有关。
实验13 MCS-51与SPI串行接口语音芯片连接 XCLK:外部采样时钟输入端,可选的采样频率如表13-1 所示。一般使用芯片内部采样频率(在出厂前已调校,误差在 +1%以内),除非对采样精度要求很高。当不用外部采样时钟 信号时,XCLK引脚必须接地。 AM CAP:自动静噪输入端。当录音信号电平下降到内部 设定的某一阈值以下时,自动静噪功能使信号衰弱,这样有助 于养活无信号(静音)时的噪声。一般情况下,该引脚对地接 1 μF电容,构成内部信号电平峰值检测电路的一部分。检出的 峰值电平与内部设定的阈值作比较,决定自动静噪功能的翻转 点。大信号时,自动静噪电路不衰减,静音时衰减6 dB。1 μF 电容也影响自动静噪电路对信号幅度的响应速度。当AM CAP 引脚接VCCA时,则禁止自动静噪。
束标志EOM或存储器末尾标志OVF时停止放音,同时INT引脚
输出低电平,指示当前段播放结束。
当需要播放两段或两段以上时,如果段与段之间间隔很 小时,可在上一段播放结束后,延迟一段时间(需通过试听确 定延迟时间的长短,一般为数十毫秒)再播放下一段。放音过 程如图13-3(a)所示。
在放音操作过程中,执行“STOP”或“STOP WRDN”命令
ANA IN+、ANA IN-:分别是录音输入放大器的同相输入
端和反相输入端。输入放大器可用单端或差分方式驱动。采用
51单片机总线方式1
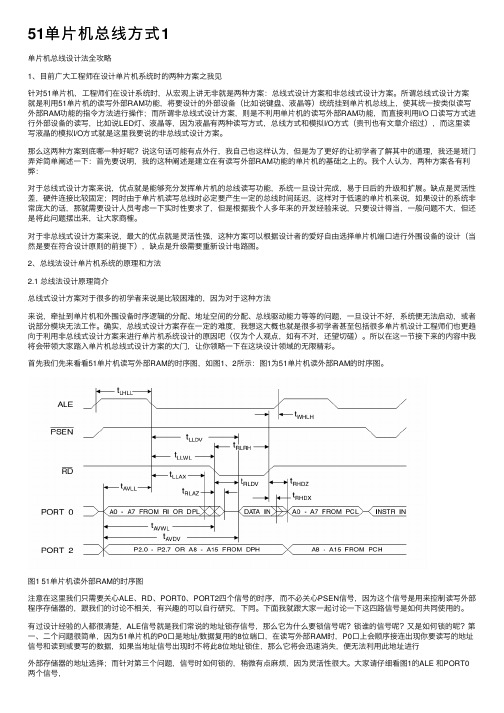
51单⽚机总线⽅式1单⽚机总线设计法全攻略1、⽬前⼴⼤⼯程师在设计单⽚机系统时的两种⽅案之我见针对51单⽚机,⼯程师们在设计系统时,从宏观上讲⽆⾮就是两种⽅案:总线式设计⽅案和⾮总线式设计⽅案。
所谓总线式设计⽅案就是利⽤51单⽚机的读写外部RAM功能,将要设计的外部设备(⽐如说键盘、液晶等)统统挂到单⽚机总线上,使其统⼀按类似读写外部RAM功能的指令⽅法进⾏操作;⽽所谓⾮总线式设计⽅案,则是不利⽤单⽚机的读写外部RAM功能,⽽直接利⽤I/O ⼝读写⽅式进⾏外部设备的读写,⽐如说LED灯、液晶等,因为液晶有两种读写⽅式,总线⽅式和模拟I/O⽅式(贵刊也有⽂章介绍过),⽽这⾥读写液晶的模拟I/O⽅式就是这⾥我要说的⾮总线式设计⽅案。
那么这两种⽅案到底哪⼀种好呢?说这句话可能有点外⾏,我⾃⼰也这样认为,但是为了更好的让初学者了解其中的道理,我还是班门弄斧简单阐述⼀下:⾸先要说明,我的这种阐述是建⽴在有读写外部RAM功能的单⽚机的基础之上的。
我个⼈认为,两种⽅案各有利弊:对于总线式设计⽅案来说,优点就是能够充分发挥单⽚机的总线读写功能,系统⼀旦设计完成,易于⽇后的升级和扩展。
缺点是灵活性差,硬件连接⽐较固定;同时由于单⽚机读写总线时必定要产⽣⼀定的总线时间延迟,这样对于低速的单⽚机来说,如果设计的系统⾮常庞⼤的话,那就需要设计⼈员考虑⼀下实时性要求了,但是根据我个⼈多年来的开发经验来说,只要设计得当,⼀般问题不⼤,但还是将此问题摆出来,让⼤家商榷。
对于⾮总线式设计⽅案来说,最⼤的优点就是灵活性强,这种⽅案可以根据设计者的爱好⾃由选择单⽚机端⼝进⾏外围设备的设计(当然是要在符合设计原则的前提下),缺点是升级需要重新设计电路图。
2、总线法设计单⽚机系统的原理和⽅法2.1 总线法设计原理简介总线式设计⽅案对于很多的初学者来说是⽐较困难的,因为对于这种⽅法来说,牵扯到单⽚机和外围设备时序逻辑的分配、地址空间的分配、总线驱动能⼒等等的问题,⼀旦设计不好,系统便⽆法启动,或者说部分模块⽆法⼯作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51单片机模拟 SPI 总线的方法1 引言SPI(Serial Peripheral Interface--串行外设接口)总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
由于SPI系统总线一共只需3~4位数据线和控制即可实现与具有SPI总线接口功能的各种I/O器件进行接口,而扩展并行总线则需要8根数据线、8~16位地址线、2~3位控制线,因此,采用SPI总线接口可以简化电路设计,节省很多常规电路中的接口器件和I/O口线,提高设计的可靠性。
由此可见,在MCS51系列等不具有SPI接口的单片机组成的智能仪器和工业测控系统中,当传输速度要求不是太高时,使用SPI总线可以增加应用系统接口器件的种类,提高应用系统的性能。
2 SPI总线的组成利用SPI总线可在软件的控制下构成各种系统。
如1个主MCU和几个从MCU、几个从MCU 相互连接构成多主机系统(分布式系统)、1个主MCU和1个或几个从I/O设备所构成的各种系统等。
在大多数应用场合,可使用1个MCU作为控机来控制数据,并向1个或几个从外围器件传送该数据。
从器件只有在主机发命令时才能接收或发送数据。
其数据的传输格式是高位(MSB)在前,低位(LSB)在后。
SPI总线接口系统的典型结构。
当一个主控机通过SPI与几种不同的串行I/O芯片相连时,必须使用每片的允许控制端,这可通过MCU的I/O端口输出线来实现。
但应特别注意这些串行I/O芯片的输入输出特性:首先是输入芯片的串行数据输出是否有三态控制端。
平时未选中芯片时,输出端应处于高阻态。
若没有三态控制端,则应外加三态门。
否则MCU的MISO端只能连接1个输入芯片。
其次是输出芯片的串行数据输入是否有允许控制端。
因此只有在此芯片允许时,SCK脉冲才把串行数据移入该芯片;在禁止时,SCK对芯片无影响。
若没有允许控制端,则应在外围用门电路对SCK进行控制,然后再加到芯片的时钟输入端;当然,也可以只在SPI总线上连接1个芯片,而不再连接其它输入或输出芯片。
3 在MCS-51系列单片机中的实现方法对于不带SPI串行总线接口的MCS-51系列单片机来说,可以使用软件来模拟SPI的操作,包括串行时钟、数据输入和数据输出。
对于不同的串行接口外围芯片,它们的时钟时序是不同的。
对于在SCK的上升沿输入(接收)数据和在下降沿输出(发送)数据的器件,一般应将其串行时钟输出口P1.1的初始状态设置为1,而在允许接收后再置P1.1为0。
这样,MCU 在输出1位SCK时钟的同时,将使接口芯片串行左移,从而输出1位数据至MCS-51单片机的P1.3口(模拟MCU的MISO线),此后再置P1.1为1,使MCS-51系列单片机从P1.0(模拟MCU 的MOSI线)输出1位数据(先为高位)至串行接口芯片。
至此,模拟1位数据输入输出便宣告完成。
此后再置P1.1为0,模拟下1位数据的输入输出……,依此循环8次,即可完成1次通过SPI总线传输8位数据的操作。
对于在SCK的下降沿输入数据和上升沿输出数据的器件,则应取串行时钟输出的初始状态为0,即在接口芯片允许时,先置P1.1为1,以便外围接口芯片输出1位数据(MCU接收1位数据),之后再置时钟为0,使外围接口芯片接收1位数据(MCU发送1位数据),从而完成1位数据的传送。
图2所示为MCS-51系列单片机与存储器X25F008(E2PROM)的硬件连接图,图2中,P1.0模拟MCU的数据输出端(MOSI),P1.1模拟SPI的SCK输出端,P1.2模拟SPI的从机选择端,P1.3模拟SPI的数据输入端(MISO)。
下面介绍用MCS-51单片机的汇编语言模拟SPI串行输入、串行输出和串行输入/输出的3个子程序,实际上,这些子程序也适用于在串行时钟的上升沿输入和下降沿输出的其它各种串行外围接口芯片(如A/D转换芯片、网络控制器芯片、LED显示驱动芯片等)。
对于下降沿输入、上升沿输出的各种串行外围接口芯片,只要改变P1.1的输出电平顺序,即先置P1.1为低电平,之后再次置P1.1为高电平,再置P1.1为低电平……,则这些子程序也同样用。
3.1 MCU串行输入子程序SPIIN从X25F008的SPISO线上接收8位数据并放入寄存器R0中的应用子程序如下:SPIIN:SETB P1.1 ;使P1.1(时钟)输出为1CLR P1.2 ;选择从机MOV R1,#08H ;置循环次数SPIIN1: CLR P1.1 ;使P1.1(时钟)输出为0NOP ;延时NOPMOV C,P1.3 ;从机输出SPISO送进位CRLC A ;左移至累加器ACCSETB P1.1 ;使P1.0(时钟)输出为1DJNZ R1,SPIIN1 ;判断是否循环8次(8位数据)MOV R0,A ;8位数据送R0RET3.2 MCU串行输出子程序SPIOUT将MCS-51单片机中R0寄存器的内容传送到X25F008的SPISI线上的程序如下:SPIOUT:SETB P1.1 ;使P1.1(时钟)输出为1CLR P1.2 ;选择从机MOV R1,#08H ;置循环次数MOV A,R0 ;8位数据送累加器ACCSPIOUT1:CLR P1.1 ;使P1.1(时钟)输出为0NOP ;延时NOPRLC A ;左移至累加器ACC最高位至CMOV P1.0,C ;进位C送从机输入SPISI线上SETB P1.1 ;使P1.1(时钟)输出为1DJNZ R1,SPIOUT1 ;判是否循环8次(8位数据)RET1 引言SPI(Serial Peripheral Interface--串行外设接口)总线系统是一种同步串行外设接口,它可以使MCU与各种外围设备以串行方式进行通信以交换信息。
外围设置FLASHRAM、网络控制器、LCD显示驱动器、A/D转换器和MCU等。
SPI总线系统可直接与各个厂家生产的多种标准外围器件直接接口,该接口一般使用4条线:串行时钟线(SCK)、主机输入/从机输出数据线MISO、主机输出/从机输入数据线MOSI和低电平有效的从机选择线SS(有的SPI接口芯片带有中断信号线INT或INT、有的SPI接口芯片没有主机输出/从机输入数据线MOSI)。
由于SPI系统总线一共只需3~4位数据线和控制即可实现与具有SPI总线接口功能的各种I/O器件进行接口,而扩展并行总线则需要8根数据线、8~16位地址线、2~3位控制线,因此,采用SPI总线接口可以简化电路设计,节省很多常规电路中的接口器件和I/O口线,提高设计的可靠性。
由此可见,在MCS51系列等不具有SPI接口的单片机组成的智能仪器和工业测控系统中,当传输速度要求不是太高时,使用SPI总线可以增加应用系统接口器件的种类,提高应用系统的性能。
2 SPI总线的组成利用SPI总线可在软件的控制下构成各种系统。
如1个主MCU和几个从MCU、几个从MCU 相互连接构成多主机系统(分布式系统)、1个主MCU和1个或几个从I/O设备所构成的各种系统等。
在大多数应用场合,可使用1个MCU作为控机来控制数据,并向1个或几个从外围器件传送该数据。
从器件只有在主机发命令时才能接收或发送数据。
其数据的传输格式是高位(MSB)在前,低位(LSB)在后。
SPI总线接口系统的典型结构。
当一个主控机通过SPI与几种不同的串行I/O芯片相连时,必须使用每片的允许控制端,这可通过MCU的I/O端口输出线来实现。
但应特别注意这些串行I/O芯片的输入输出特性:首先是输入芯片的串行数据输出是否有三态控制端。
平时未选中芯片时,输出端应处于高阻态。
若没有三态控制端,则应外加三态门。
否则MCU的MISO端只能连接1个输入芯片。
其次是输出芯片的串行数据输入是否有允许控制端。
因此只有在此芯片允许时,SCK脉冲才把串行数据移入该芯片;在禁止时,SCK对芯片无影响。
若没有允许控制端,则应在外围用门电路对SCK进行控制,然后再加到芯片的时钟输入端;当然,也可以只在SPI总线上连接1个芯片,而不再连接其它输入或输出芯片。
3 在MCS-51系列单片机中的实现方法对于不带SPI串行总线接口的MCS-51系列单片机来说,可以使用软件来模拟SPI的操作,包括串行时钟、数据输入和数据输出。
对于不同的串行接口外围芯片,它们的时钟时序是不同的。
对于在SCK的上升沿输入(接收)数据和在下降沿输出(发送)数据的器件,一般应将其串行时钟输出口P1.1的初始状态设置为1,而在允许接收后再置P1.1为0。
这样,MCU 在输出1位SCK时钟的同时,将使接口芯片串行左移,从而输出1位数据至MCS-51单片机的P1.3口(模拟MCU的MISO线),此后再置P1.1为1,使MCS-51系列单片机从P1.0(模拟MCU 的MOSI线)输出1位数据(先为高位)至串行接口芯片。
至此,模拟1位数据输入输出便宣告完成。
此后再置P1.1为0,模拟下1位数据的输入输出……,依此循环8次,即可完成1次通过SPI总线传输8位数据的操作。
对于在SCK的下降沿输入数据和上升沿输出数据的器件,则应取串行时钟输出的初始状态为0,即在接口芯片允许时,先置P1.1为1,以便外围接口芯片输出1位数据(MCU接收1位数据),之后再置时钟为0,使外围接口芯片接收1位数据(MCU发送1位数据),从而完成1位数据的传送。
图2所示为MCS-51系列单片机与存储器X25F008(E2PROM)的硬件连接图,图2中,P1.0模拟MCU的数据输出端(MOSI),P1.1模拟SPI的SCK输出端,P1.2模拟SPI的从机选择端,P1.3模拟SPI的数据输入端(MISO)。
下面介绍用MCS-51单片机的汇编语言模拟SPI串行输入、串行输出和串行输入/输出的3个子程序,实际上,这些子程序也适用于在串行时钟的上升沿输入和下降沿输出的其它各种串行外围接口芯片(如A/D转换芯片、网络控制器芯片、LED显示驱动芯片等)。
对于下降沿输入、上升沿输出的各种串行外围接口芯片,只要改变P1.1的输出电平顺序,即先置P1.1为低电平,之后再次置P1.1为高电平,再置P1.1为低电平……,则这些子程序也同样用。