所谓显式和隐式
显式动力学与隐式动力学
显式动力学与隐式动力学
显式动力学和隐式动力学是在数值求解微分方程时使用的两种方法。
显式动力学方法是指在求解微分方程时,直接根据已知的初始条件和微分方程的表达式进行迭代计算。
在每个时间步长内,通过使用已知的参数和当前时刻的状态来计算下一个时刻的状态。
这种方法通常比较简单直观,计算也相对比较快速。
隐式动力学方法则是通过将微分方程转化为一个隐式方程组进行求解。
在每个时间步长内,需要通过求解一个非线性方程组来确定下一个时刻的状态。
这种方法的优势在于可以处理一些比较复杂的微分方程,如刚性方程。
然而,由于需要求解方程组,计算复杂度较高,通常比显式方法慢。
选择使用显式动力学还是隐式动力学方法,在很大程度上取决于所求解的微分方程的特性和计算资源的限制。
一般来说,如果微分方程是非刚性的且计算资源充足,则显式动力学方法可能是更好的选择;而如果微分方程是刚性的或者对计算资源较为敏感,则隐式动力学方法可能更适合。
显式与隐式算法区别
显式(explicit)和隐式(implicit)这两个词在有限元分析中大家可能经常看到,特别是涉及到动力学分析时。
但其实广义的说他们分别对应着两种不同的算法:显式算法(explicit method)和隐式算法(implicit method)。
所以不论在动力学或者静力学中都有涉及到。
显式算法:不直接求解切线刚度,不进行平衡迭代,计算速度快,时间步长只需要足够小,一般不存在收敛问题,需要的内存也小。
隐式算法:每一增量步都需要对静态方程进行平衡迭代,且每次迭代需要求解大量的线性方程组,这一特点使之占用大量的资源。
但该算法增量步可以很大,至少比显式算法大的多,实际计算中会受到迭代次数及非线性程度的影响我们都知道有限元分析FEA在计算微分方程(differential equations)时,由于计算本身的局限,比如计算机储存的位数有限,以及方程本身的复杂性,计算机运用的是数值算法(numerical algorithm)来逼近真实解的。
有限元分析中数值算法的基础是欧拉法(Euler method),欧拉法又分为forward Euler method 和backward Euler method,这两种方法被简称为显式法(explicit method)和隐式法(implicit method)。
中心差分法:(动力学分析)用有限差分代替位移对时间的求导,将运动方程中的速度与加速度用位移的某种组合来标示,这样就将常微分方程组的求解问题转化为代数方程组的求解问题,并假设在每个小的时间间隔内满足运动方程。
首先我们来看看这两种算法的区别。
显式算法(explicit method )(forward Euler method )考虑常微分方程:初始条件:设为每一步的时间步长, 在Tn 时刻,. (n=0,1,2,3...),在T(n+1)时刻有:所以在显式算法中,T(n+1)时刻的值由T(n)时刻决定,也就是说当前时刻的值由上一时刻的值决定。
显式&隐式求解
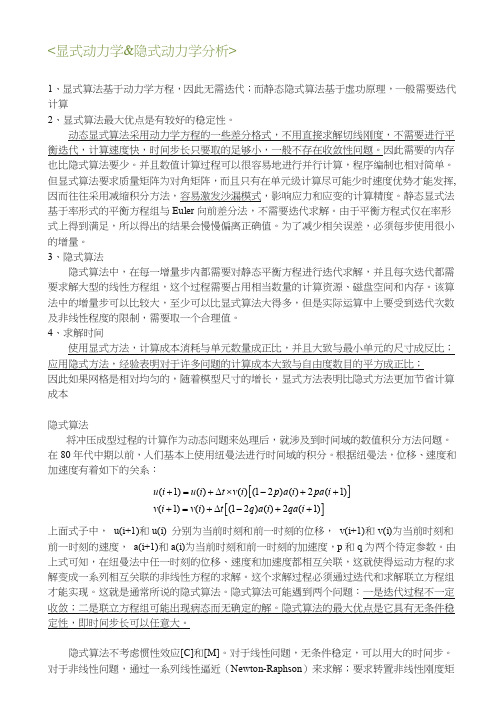
通过(03)(09)可以得到两种方法的计算特点,显式算法是每一步求解为矩阵乘法,时间步 选择为条件稳定;隐式算法是每一步求解为线性方程组求解,时间步选择为无条件稳定。 下面主要分析两种方法的应用范围。 在求解动力学问题时,将方程在空间上采用有限元法(或其他方法)进行离散后,变为 常微分方程组
C u K u f M u
只不过,在显示动力分析中最消耗 CPU 的一项就是单元的处理。由于积分点的个数与 CPU 时间成正比,采用简化积分的单元便可以极大的节省数据存储量和运算次数,进而提高 运算效率。除节省 CPU 外,单点积分单元在大变形分析中同样有效,Ansys/ls-dyna 单元能承 受比标准 Ansys 隐式单元更大的变形。因此,每种显示动力单元确省为单点积分。但单点积 分有两个缺点:1.出现零能模型(沙漏模态);2.应力结果精确度与积分点相关。为了控制沙 漏,可以采用全积分单元。 总结一下,显示算法、隐式算法与单点积分、全积分不是一个层次上的概念。 我们在求解问题的时候应先根据我们的问题类型来决定是采用显示算法还是隐式算法。 如果是采用显示算法,默认是单点积分,如果产生了沙漏,改用全积分。
u (i 1) 2u (i ) u (i 1) a (i )(t )2 v(i 1) u (i 1) u (i 1) 2t
由上式可以看出,当前时刻的位移只与前一时刻的加速度和位移有关,这就意味着当前时刻 的位移求解无需迭代过程。另外,只要将运动方程中的质量矩阵和阻尼矩阵对角化,前一时 刻的加速度求解无需解联立方程组,从而使问题大大简化,这就是所谓的显式算法。显式算 法的优点是它即没有收敛性问题,也不需求解联立方程组,其缺点是时间步长受到数值积分 稳定性的限制,不能超过系统的临界时间步长。 显式算法是 ansys/ls-dyna 中主要的求解方法,用于分析大变形、瞬态问题、非线性动力 学问题等。 对于非线性分析, 显示算法有一些基本的特点, 如: 块质量矩阵需要简单的转置; 方程非耦合,可以直接求解;无须转置刚度矩阵,所有的非线性问题(包括接触)都包含在 内力矢量中;内力计算是主要的计算部分;无效收敛检查;保存稳定状态需要小的时间步。 显式算法和隐式算法, 有时也称为显式解法和隐式解法, 是计算力学中常见的两个概念, 但是它们并没有普遍认可的定义,下面收集的一些理解。先看看一般对两种方法的理解和比 较 ============================================================= 显式算法 隐式算法 ----------------------------------------------------------------------------------(01)适用问题 动力学(动态) 静力学(静态) (02)阻尼 人工阻尼 数值阻尼 ----------------------------------------------------------------------------------(03)每步求解方法 矩贮量 小 大 (06)每步计算速度 快 慢 (07)迭代收敛性 无 有 (08)确定解 有确定解 可能是病态无确定解 ----------------------------------------------------------------------------------(09)时步稳定性 有条件 无条件 (10)时间步 小 大 (11)计算精度 低 高 ============================================================= (01)是明显不对的, 只是对两种方法的初级理解, (02)也是同样。 下面要详细讨论这两点。 (03)是每一步求解的方法,(04)(05)(06)(07)(08)是由(03)所决定的,它们不是两种方法的基本 特点。同样,(09)是时间步选择的方法,(10)(11)是由(09)所决定的。
显式有限元和隐式有限元

按照计算每一时刻动力反应是否需要求解线性方程组,可将直接积分法分为隐式积分方法和显式积分方法两类。
隐式积分法是根据当前时刻及前几时刻体系的动力反应值建立以下一时刻动力反应值为未知量的线性方程组,通过求解方程组确定下一时刻动力反应。
隐式方法的研究和应用由来已久,常用的方法有线性加速度法、常平均加速度法、New mark方法、Wilson-θ法、Houbolt 方法等。
显式积分法可由当前时刻及前几时刻的体系动力反应值直接外推下一时刻的动力反应值,不需要求解线性方程组,实现了时间离散的解耦。
解方程组一般占整个有限元求解程序耗时的70%左右,因此,这一解耦技术对计算量的节省是可观的。
隐式方法大部分是无条件稳定的,显式方法为条件稳定。
显式方法的稳定性可以按满足精度要求的空间步距确定满足数值积分稳定性要求的时问步距来实现。
显式方法受条件稳定的限制,时间积分步长将取得较小,但计算经验表明,对于一些自由度数巨大且介质呈非线性的问题,显式法比隐式法所需的计算量要小得多。
因此,随着所考虑问题复杂性的增加,显式积分法得到重视。
对于显式与隐式有限元的理解关键字: 有限元显式隐式显式算法和隐式算法,有时也称为显式解法和隐式解法,是计算力学中常见的两个概念,但是它们并没有普遍认可的定义,下面只是我的一些个人理解。
一、两种算法的比较1、显式算法基于动力学方程,因此无需迭代;而静态隐式算法基于虚功原理,一般需要迭代计算。
显式算法,最大优点是有较好的稳定性。
动态显式算法采用动力学方程的一些差分格式(如广泛使用的中心差分法、线性加速度法、Newmark法和wilson法等),不用直接求解切线刚度,不需要进行平衡迭代,计算速度快,时间步长只要取的足够小,一般不存在收敛性问题。
因此需要的内存也比隐式算法要少。
并且数值计算过程可以很容易地进行并行计算,程序编制也相对简单。
但显式算法要求质量矩阵为对角矩阵,而且只有在单元积分点计算尽可能少时速度优势才能发挥, 因而往往采用减缩积分方法,容易激发沙漏模式,影响应力和应变的计算精度。
显式与隐式(ExplicitAndImplicit)

显式与隐式(ExplicitAndImplicit)显式与隐式(Explicit And Implicit)1.概念1.1 显式实现的单词Explicit意思是清楚的、明确的、详述的。
所以,显式的“显”是指明显且清楚的实现,相对于接⼝来说,就是明显⽽清楚的指定了接⼝的实现。
对于其他的逻辑来说,显式就是清楚且明确的指定了实现内容。
1.2 隐式实现的单词Implicit意思是隐匿的、不⾔明的、绝对的。
所以,隐式的实现是指想当然的实现,相对于接⼝来说,只要实现类的⽅法签名和返回值与接⼝定义的⼀致即视为接⼝的实现,并⽆显式的(清晰的、明确的)指定。
2.例⼦2.1 代码1using System;2namespace ExplicitAndImplicit{3//⼑⼦4public interface IKnife{5void KillPeople();6 }7//枪8public interface IGun{9void KillPeople();10 }11//隐式实现12public class WrongKillMachine:IKnife,IGun{13public void KillPeople(){14 Console.WriteLine("切切切脑袋");15 }16 }17//显式实现:18//1.实现接⼝⽅法不需要加访问定义符19//2.实现接⼝⽅法前⾯要加接⼝名.⽅法名,⽤来指定其实现的接⼝20//2.实现接⼝⽅法只能被显式的调⽤,不能被隐式的调⽤:21// 显式调⽤:22public class KillMachine:IKnife,IGun{23void IKnife.KillPeople(){24 Console.WriteLine("切切切");25 }26void IGun.KillPeople(){27 Console.WriteLine("啪啪啪");28 }29 }30public static class Case31 {32public static void Begin(){33 Console.WriteLine("Design Pattern —— Explicit And Implicit:");34//隐式实现35 WrongKillMachine w = new WrongKillMachine();36 w.KillPeople();3738//显式实现39 IKnife k = new KillMachine();40 k.KillPeople();41 IGun g = new KillMachine();42 g.KillPeople();43 }44 }45 }2.2 结果2.3 例⼦解释2.3.1 隐式实现即为WrongKillMachine类,并没有指定每个接⼝的实现⽅法,⽽是通过⼀个签名与返回值⼀致的⽅法来隐式实现(Implicit、不⾔明的、绝对的、隐匿的)。
显式与隐式的区别显式与隐式的区别

L后EDSI3面G-EPOI有RGUE专VPT:O:门S与的ATS示显CDI例示3IP文来。O件说LT,明文是这件所种一有分输样析出的并模怎二态样进的进制文行输档后出总处文结理件。。,包含每一模态下的振型,可以用
17.3 LS-DYNA 隐式单元公式:
LS-D一使YN用般A*情S开E况发C下T有IO,专N不门_O建的PT议各IO种使N隐用来式定L单S义-元D。Y应N用A于缺隐省式的分显析式中,单下点面积具分体单介元绍来各求种解隐隐式式单问元题:,
采用 Newmark 隐式时间积分
对于线性问题,无条件稳定 M∆an+1
+
K∆un+1
=
f ext n+1
−
f int n
−
Ma n
可以采用大的时间步
对需于要非求线解性刚问度题矩阵,需要一系列线性逼近(Newton-Raphson)叠代求解
适合静力问题、低频动力问题及特征值分析。
17.2 在LSL-SD-DYYNNAA中中隐,式缺省分的析求的解激是活显及式求相解关,关可键以字通过下面的关键字来激活隐式求解:
6积个分自点由,度厚(d度x,方dy向, d建z,议rx,5ry个, r积z)分点
不能退化为三角形
利用沙漏控制 8 增加翘曲刚度,改善收敛性
非常适合用于回弹计算
298
3. 线每性个壳节:点186号个单自元由公度式(dx, dy, dz, rx, ry, rz)
*CONTROL_IMPLICIT_GENERAL
其中参数
imflag=1 imflag=0
激活全隐式求解 为缺省的显式求解
295
i该m关fla键g=字2 对为于显所式有求隐解式后求无解缝分进析行来隐说式都回是弹必求需解的。。
显式算法与隐式算法的区别
显式算法与隐式算法得区别1、显式算法最大优点就是有较好得稳定性。
动态显式算法采用动力学方程得一些差分格式(如广泛使用得中心差分法、线性加速度法、Newmark法与wilson法等),不用直接求解切线刚度,不需要进行平衡迭代,计算速度快,时间步长只要取得足够小,一般不存在收敛性问题。
因此需要得内存也比隐式算法要少。
并且数值计算过程可以很容易地进行并行计算,程序编制也相对简单。
但显式算法要求质量矩阵为对角矩阵,而且只有在单元级计算尽可能少时速度优势才能发挥。
因而往往采用减缩积分方法,容易激发沙漏模式,影响应力与应变得计算精度。
静态显式法基于率形式得平衡方程组与Euler向前差分法,不需要迭代求解。
由于平衡方程式仅在率形式上得到满足,所以得出得结果会慢慢偏离正确值。
为了减少相关误差,必须每步使用很小得增量。
2、隐式算法隐式算法中,在每一增量步内都需要对静态平衡方程进行迭代求解,并且每次迭代都需要求解大型得线性方程组,这以过程需要占用相当数量得计算资源、磁盘空间与内存。
该算法中得增量步可以比较大,至少可以比显式算法大得多,但就是实际运算中上要受到迭代次数及非线性程度得限制,需要取一个合理值。
3、求解时间t使用显式方法,计算成本消耗与单元数量成正比,并且大致与最小单元得尺寸成反比;应用隐式方法,经验表明对于许多问题得计算成本大致与自由度数目得平方成正比;因此如果网格就是相对均匀得,随着模型尺寸得增长,显式方法表明比隐式方法更加节省计算成本。
所谓显式与隐式,就是指求解方法得不同,即数学上得出发点不一样。
并不就是说显式只能求动力学问题,隐式只能求静力学问题,只就是求解策略不通。
显式求解就是对时间进行差分,不存在迭代与收敛问题,最小时间步取决于最小单元得尺寸。
过多与过小得时间步往往导致求解时间非常漫长,但总能给出一个计算结果。
解题费用非常昂贵。
因此在建模划分网格时要非常注意。
隐式求解与时间无关,采用得就是牛顿迭代法(线性问题就直接求解线性代数方程组),因此存在一个迭代收敛问题,不收敛就得不到结果。
数据类型-转换-隐式转换和显式转换

数据类型-转换-隐式转换和显式转换数据类型转换分为隐式转换和显式转换,根据不同的转换对象,来确定是那种类型的转换。
隐式转换:就是系统默认的、不需要加以声明就可以进⾏转换。
⾸先来说在程序语⾔中默认的类型,⼀般整数是int类型,浮点数(3.14),默认就是double类型。
但是还有其他类型的,例如整数类型的long,浮点数的float。
当相同类型之间相遇的时候,就会出现隐式转换的问题。
那么隐式转换的规则就是根据数据类型从⼩到⼤的转换:byte→short→int→long(整数类型)例如:long num1 = 100;这个num1根据类型命名为long整数型,但是右侧的100在程序语⾔中默认为是int整数类型。
然⽽根据隐式转换规则,int类型可以⾃动的转换为long整数类型。
故⽽在程序运⾏的时候不会出现错误。
float→double(浮点数)例如:double num1 = 2.5F(F在这⾥代表是float类型的意思);这个同上复述。
num1是double类型,但是2.5F是float类型,因为符合隐式转换的规则,所以2.5F会⾃动的转换为双精度类型,2.50.显⽰转换:当系统默认转换不能转换的时候,⽽我们⼜需要把某⼀类型改为另⼀个类型,这个过程我们称之为显⽰转换也叫做强制转换。
例如:double类型转换成int类型,如int num1 = 3.14(3.14默认为double类型)int是整数型,是不带⼩数点的,然⽽在double类型中是带⼩数点之后两位的,如果要想让这⾏代码成⽴,则需要强制转换,在不同的程序语⾔中有不同的⽅法,这⾥是⽤java语⾔来说明的,int num1 =(int)3.14;只要如此写,在程序中这⾏代码就可以运⾏。
精度丢失:然⽽在这样情况下,会出现⼀个⽐较常见的问题,也是经常会遇见的错误,精度丢失,就是3.14double类型的转换到int类型之后,就只剩下了⼀个3,变为整数型。
接触问题的显式与隐式有限元方法研究

接触问题的显式与隐式有限元方法研究接触问题是固体力学中的一个重要问题,它在机械、航空航天、汽车制造等领域都有着广泛的应用。
有限元方法是解决接触问题的一种有效手段,其中显式方法和隐式方法是两种常见的有限元方法。
显式方法指的是在求解过程中,通过显式地列出接触条件和摩擦力,从而求解接触问题。
显式方法的优点是计算过程简单,易于实现,且能够考虑接触面间的摩擦力。
但是,显式方法也存在一些缺点,例如难以处理复杂的接触形状和非线性材料性质,此外,显式方法还需要对摩擦系数进行假设,否则无法求解。
隐式方法指的是在求解过程中,通过隐式地考虑接触条件和摩擦力,从而求解接触问题。
隐式方法的优点是能够自适应地计算接触面间的摩擦力,且能够处理复杂的接触形状和非线性材料性质。
但是,隐式方法的计算过程比较复杂,需要对材料性质和接触面进行精确的建模,此外,隐式方法还需要对摩擦系数进行假设,否则无法求解。
为了验证显式方法和隐式方法的有效性,我们通过实例进行了计算。
我们选取了一个简单的接触问题,即两个平行的金属板之间的接触问题,其中一个金属板的长度为 100mm,宽度为 50mm,厚度为 1mm,另一个金属板的长度为 100mm,宽度为 50mm,厚度为 2mm。
两个金属板之间的接触面为 50mm×50mm。
我们分别采用了显式方法和隐式方法进行计算,并比较了计算结果。
显式方法的计算过程如下:我们首先建立有限元模型,然后列出接触条件和摩擦力,最后求解得到接触压力和摩擦力。
显式方法的计算结果如下:接触压力为 999.5N,摩擦力为 29.1N。
隐式方法的计算过程如下:我们首先建立有限元模型,然后采用隐式方法计算接触面间的摩擦力,最后求解得到接触压力和摩擦力。
隐式方法的计算结果如下:接触压力为 999.5N,摩擦力为 29.1N。
通过比较计算结果,我们可以发现,显式方法和隐式方法都能够准确地计算接触问题,但是,隐式方法的计算结果更加准确,能够考虑接触面间的摩擦力,而显式方法需要对摩擦系数进行假设,否则无法求解。
隐式与显式动力学的区别-弹性动力学有限元基本解法
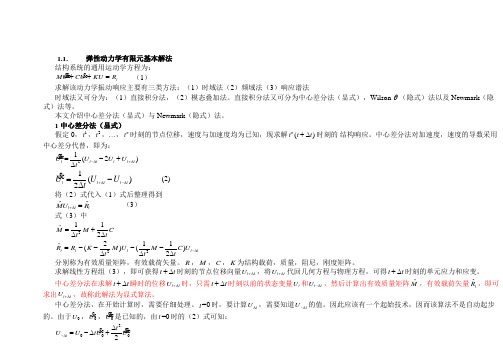
1.1. 弹性动力学有限元基本解法 结构系统的通用运动学方程为: tR KU U C U M =++ (1) 求解该动力学振动响应主要有三类方法:(1)时域法(2)频域法(3)响应谱法时域法又可分为:(1)直接积分法,(2)模态叠加法。
直接积分法又可分为中心差分法(显式),Wilson θ(隐式)法以及Newmark (隐式)法等。
本文介绍中心差分法(显式)与Newmark (隐式)法。
1 中心差分法(显式)假定0,1t ,2t ,…,n t 时刻的节点位移,速度与加速度均为已知,现求解)(t t t n ∆+时刻的 结构响应。
中心差分法对加速度,速度的导数采用中心差分代替,即为:)2(12t t t t t tU U U tU ∆+∆-+-∆=)(21t t t t tU U tU ∆-∆+-∆= (2)将(2)式代入(1)式后整理得到 tt t R U M ˆˆ=∆+ (3) 式(3)中CtM tM∆+∆=211ˆ2t t t tt U C tM tU M tK R R ∆-∆-∆-∆--=)211()2(ˆ22分别称为有效质量矩阵,有效载荷矢量。
R ,M ,C ,K 为结构载荷,质量,阻尼,刚度矩阵。
求解线性方程组(3),即可获得t t ∆+时刻的节点位移向量t t U ∆+,将t t U ∆+代回几何方程与物理方程,可得t t ∆+时刻的单元应力和应变。
中心差分法在求解t t ∆+瞬时的位移t t U ∆+时,只需t t ∆+时刻以前的状态变量t U 和t t U ∆-,然后计算出有效质量矩阵M ˆ,有效载荷矢量tR ˆ,即可求出t t U ∆+,故称此解法为显式算法。
中心差分法,在开始计算时,需要仔细处理。
t =0时,要计算t U ∆,需要知道t U ∆-的值。
因此应该有一个起始技术,因而该算法不是自动起步的。
由于0U ,0U ,0U 是已知的,由t =0时的(2)式可知:202U t U t U U t ∆+∆-=∆- 中心差分法中时间步长t ∆的选择涉及两个方面的约束:数值算法的稳定性和计算时间。
隐式求解与显式求解

大多数非线性动力学问题一般多是采用显式求解方法,特别是在求解大型结构的瞬时高度非线性问题时,显示求解方法有明显的优越性。
下面先简要对比一下隐式求解法和显示求解法。
动态问题涉及到时间域的数值积分方法问题。
在80年代中期以前,人们基本上采用纽曼法进行时间域的积分。
根据纽曼法,位移、速度和加速度有着如下关系:u(i+1)=u(i)+△t*v(i)[(1—2p)a(i)+2p*a(i+1)] (1)v(i+1)=V(i)+△t[(1-2q)a(i)+2qa(i+1)] (2)上面式子中 u(i+1),u(i)分别为当前时刻和前一时刻的位移,v(i+1)和V(i)为当前时刻和前一时刻的速度,a(i+1)和a(i)为当前时刻和前一时刻的加速度,p和q为两个待定参数,△t 为当前时刻与前一时刻的时问差,符号* 为乘号。
由式(1)和式(2)可知,在纽曼法中任一时刻的位移、速度、加速度都相互关联,这就使得运动方程的求解变成一系列相互关联的非线性方程的求解,这个求解过程必须通过迭代和求解联立方程组才能实现。
这就是通常所说的隐式求解法。
隐式求解法可能遇到两个问题。
一是迭代过程不一定收敛,二是联立方程组可能出现病态而无确定的解。
隐式求解法最大的优点是它具有无条件稳定性,即时间步长可以任意大。
如果采用中心差分法来进行动态问题的时域积分,则有如下位移、速度和加速度关系式:u(i+1)=2u(i)-u(i-1)+a(i)(△t)^2 (3)v (i+1)=[u (i+1)-u (i-1)]/2(△t) (4)式中u(i-1),为i -1时刻的位移。
由式(3)可以看出,当前时刻的位移只与前一时刻的加速度和位移有关,这就意味着当前时刻的位移求解无需迭代过程。
另外,只要将运动过程中的质量矩阵和阻尼矩阵对角化,前一时刻的加速度求解无需解联立方程组,从而使问题大大简化,这就是所谓的显式求解法。
显式求解法的优点是它既没有收敛性问题,也不需要求解联立方程组,其缺点是时间步长受到数值积分稳定性的限制,不能超过系统的临界时间步长。
ABAQUS显隐式、非线性及接触

1. 关于隐式和显式隐式算法和显式算法是两个比较范的概念,无论是静力学问题,还是动力学问题,都可以应用这两种方法。
隐式方法包括Newton-Raphson method,Tangetial stiffness method,radial return method等等;显式算法包括central difference method等。
隐式算法能提供更有力的整体逼近,达到收敛需反复的迭代,因而代价比价大;显式方法不需要迭代,因而代价较小。
隐式算法适于结构的瞬态响应等问题;显式算法适于冲击、爆炸等问题。
隐式算法稳定性是无条件的,以K求逆为代价换得了比显式算法可以采用大得多的时间步长;显式算法是条件稳定,其积分的结果依赖时间步的大小,步长变大往往会造成结果不收敛,所以要注意时间步的大小,还要保证计算结果与真实结论的偏差要小。
对于ABAQUS而言,用户经常要开发用户子程序(UMAT),当材料响应进入非线性,应力更新算法既可采用隐式和也可采用显式。
隐式积分方法需要Jacobian(包括切线刚度矩阵与载荷刚度矩阵),因为Jacobian并不影响结果的准确性,却影响收敛的速度,由于这个原因,近似的Jacobian经常被采用,进一步原因是因为塑性模型本身的复杂性,材料的Jacobian 不能导出解析解,因此数值近似的方法往往被采用。
2. 不论对于线性问题还是非线性问题,显式方法都需要一个小的时间增步量,它只依赖于模型的最高阶自振频率,而与载荷类型和加载时间无关。
3. 振型叠加技术可以确定线性系统的动态响应,可以计算瞬时载荷下的瞬时响应、谐波载荷下的稳态响应、基础运动的峰值响应以及随机载荷的响应,效率很高。
但模态技术不适于非线性分析,这类分析中必须采用直接时间积分法或显式分析。
4. 采用模态技术时,为获得结构动态行为的准确描述,必须提取足够多的振型。
在发生运动的方向上总的模型有效质量必须占据总的可运动质量的90%以上才能产生准确结果。
显式欧拉公式和隐式欧拉公式

显式欧拉公式和隐式欧拉公式
隐式欧拉法,又称后退欧拉法,是按照隐式公式进行数值求解的方法。
隐式公式不能直接求解,一般需要用欧拉显示公式得到初值,然后用欧拉隐式公式进行迭代求解。
因此,隐式公式比显示公式计算复杂,但稳定性好。
实际遇到的常微分方程中,多数很难找到解析解。
因此,学会用数值解法求出常微分方程的特解,即用表格或图示法来表示近似满足微分方程和初始条件的解。
思想:采用离散变量法,即把一个连续型问题转化成一个离散型问题,即采用步进的方式求出方程在一些离散点上的近似值。
显式和隐式求解方法
显式和隐式求解方法以下是 6 条关于“显式和隐式求解方法”的内容:1. 嘿,你知道吗?显式求解方法就像是直接去进攻问题,一拳把答案给打出来!比如说计算物体直线运动的距离,我们一下子就能根据公式清楚地算出结果呀。
而隐式求解方法呢,就有点像跟问题玩捉迷藏,要绕几个弯才能找到答案。
就拿求解复杂系统的平衡状态来说,得费点心思呢!这两种求解方法,可都是解决问题的宝贝呀,我们可得好好研究呢!2. 哎呀呀,想象一下,显式求解方法是那爽快直接的剑客,面对问题一剑封喉!就像我们算简单的数学运算,直接得出结果。
可隐式求解方法呢,是那神秘莫测的谋士,需要精心布局才能找到答案。
好比研究一些隐性的规律,得慢慢挖掘呀。
它们是不是都超有意思呢?3. 哇塞,显式求解方法啊,就如同在光明大道上奔跑,清晰明了直达目的地!像计算简单的几何图形面积,那不是轻而易举嘛。
但隐式求解方法呢,像是在迷雾中摸索,充满了挑战和未知呢!就像解锁一个复杂的密码锁,需要耐心和技巧呀。
这两者结合起来,那可真是无敌啦!4. 嘿哟!显式求解方法就好像是打开电灯开关,瞬间光明!比如快速算出一个直角三角形的斜边长度。
可隐式求解方法是在黑暗中探寻宝藏,需要耐着性子啊!就如探寻物体之间复杂的相互作用力。
它们俩,那可都不能小瞧呀!5. 天哪,显式求解方法简直就是那勇往直前的勇士,直截了当!例如快速得到一个匀速运动物体的位移。
而隐式求解方法就像那心思缜密的侦探,不放过任何蛛丝马迹!比如分析复杂电路中的电流分布。
这两种求解方法,真是各有千秋呢!6. 咦,你想想看,显式求解方法是那干脆利落的短跑健将,一下子就冲过终点!像直接计算一个圆的周长。
隐式求解方法则像那步步为营的棋手,精心布局!比如研究复杂生态系统的动态平衡。
它们不就像是解决问题的左膀右臂么?我的观点结论:显式和隐式求解方法都有着独特的魅力和作用,在不同的情况下都能发挥巨大的价值,我们要好好利用它们来攻克各种难题!。
隐函数和显函数的区别

隐函数和显函数的区别1.表达方式:-显函数:显函数是以显式形式给出的函数,其中自变量和函数值之间的关系可以直接表达出来。
例如,y=f(x)=2x+1就是一个显函数,它明确给出了自变量x和函数值y之间的关系。
-隐函数:隐函数是以隐式形式给出的函数,其中自变量和函数值之间的关系不能直接表达出来,需要通过其他方式来确定。
例如,x^2+y^2=1就是一个隐函数,它无法直接解出y。
2.求解方式:-显函数:由于显函数的关系可以明确地表达出来,因此可以直接通过算术运算和代数求解的方法来求解。
例如,对于显函数y=2x+1,我们可以通过代入不同的x值来计算对应的y值。
-隐函数:由于隐函数的关系无法直接表达出来,因此需要使用隐函数定理或其他数值方法来求解。
隐函数定理可以在一定条件下将隐函数转换为显函数,然后再进行求解。
另外,也可以通过数值逼近的方法来计算隐函数的近似解。
3.应用领域:-显函数:显函数在数学中的应用非常广泛,它们被用于描述各种数学模型和物理规律。
例如,线性函数、多项式函数和三角函数等都属于显函数,它们在微积分、统计学和物理学等领域中有着重要的应用。
-隐函数:隐函数经常在几何学和微积分中使用。
例如,曲线和曲面的方程经常是以隐函数的形式给出的。
隐函数也被广泛应用于微分方程和微积分的相关问题中,例如求解微分方程的特解或者求解曲线的切线等。
总结起来,隐函数和显函数是描述函数之间关系的两种不同方式。
显函数可以直接表达出自变量和函数值之间的关系,并且可以通过代数求解的方法求解。
而隐函数则无法直接表达出关系,需要使用隐函数定理或其他方法来求解。
两种函数的应用领域略有不同,但都在数学和物理学等领域有着广泛的应用。
显示算法和隐式算法单点积分算法和全积分算法
先说说显示算法和隐式算法:这是ansys里面的两种求解方法。
大多数非线性动力学问题一般多是采用显式求解方法,特别是在求解大型结构的瞬时高度非线性问题时,显示求解方法有明显的优越性。
下面先简要对比一下隐式求解法和显示求解法。
动态问题涉及到时间域的数值积分方法问题。
在80年代中期以前,人们基本上采用纽曼法进行时间域的积分。
根据纽曼法,位移、速度和加速度有着如下关系:u(i+1)=u(i)+△t*v(i)[(1—2p)a(i)+2p*a(i+1)] (1)v(i+1)=V(i)+△t[(1-2q)a(i)+2qa(i+1)] (2)上面式子中 u(i+1),u(i)分别为当前时刻和前一时刻的位移,v(i+1)和V(i)为当前时刻和前一时刻的速度,a(i+1)和a(i)为当前时刻和前一时刻的加速度,p和q为两个待定参数,△t为当前时刻与前一时刻的时问差,符号* 为乘号。
由式(1)和式(2)可知,在纽曼法中任一时刻的位移、速度、加速度都相互关联,这就使得运动方程的求解变成一系列相互关联的非线性方程的求解,这个求解过程必须通过迭代和求解联立方程组才能实现。
这就是通常所说的隐式求解法。
隐式求解法可能遇到两个问题。
一是迭代过程不一定收敛,二是联立方程组可能出现病态而无确定的解。
隐式求解法最大的优点是它具有无条件稳定性,即时间步长可以任意大。
如果采用中心差分法来进行动态问题的时域积分,则有如下位移、速度和加速度关系式:u(i+1)=2u(i)-u(i-1)+a(i)(△t)^2 (3)v(i+1)=[u(i+1)-u(i-1)]/2(△t) (4)式中u(i-1),为i-1时刻的位移。
由式(3)可以看出,当前时刻的位移只与前一时刻的加速度和位移有关,这就意味着当前时刻的位移求解无需迭代过程。
另外,只要将运动过程中的质量矩阵和阻尼矩阵对角化,前一时刻的加速度求解无需解联立方程组,从而使问题大大简化,这就是所谓的显式求解法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
所谓显式和隐式,是指求解方法的不同,即数学上的出发点不一样。
并不是说显式只能求动力学问题,隐式只能求静力学问题,只是求解策略不通。
显式求解是对时间进行差分,不存在迭代和收敛问题,最小时间步取决于最小单元的尺寸。
过多和过小的时间步往往导致求解时间非常漫长,但总能给出一个计算结果。
解题费用非常昂贵。
因此在建模划分网格时要非常注意。
隐式求解和时间无关,采用的是牛顿迭代法(线性问题就直接求解线性代数方程组),因此存在一个迭代收敛问题,不收敛就的不到结果。
两者求解问题所耗时间的长短理论上无法比较。
实际应用中一般感觉来说显式耗时多些。
由于两者解题的出发点,所以一般来说显式用于求解和时间相关的动力学问题。
隐式用来求解和时间无关的静力学问题。
但也不是绝对的。
比如,用隐式求解时,为了克服迭代不收敛,改用显式算,但是要多给点时间,这样虽然克服了不收敛的问题,但是求解的时间费用也是相当客观的。
另外,隐式也可以求解动力学问题。