安川伺服电机伺服调整步骤
安川伺服参数设定说明

安川伺服参数设定说明一、参数设置前的准备工作在进行参数设定之前,我们需要先了解一些基本的概念和参数含义,以便更好地理解和应用参数。
1.1速度环和位置环安川伺服驱动器中有两个重要的环称为速度环和位置环。
速度环控制驱动器的速度输出,而位置环控制驱动器的位置输出。
1.2速度环参数a)P增益:是速度环的比例增益,用于调节速度环的灵敏度。
b)I增益:是速度环的积分增益,用于调节速度环的稳定性。
c)D增益:是速度环的微分增益,用于调节速度环的响应速度。
1.3位置环参数a)P增益:是位置环的比例增益,用于调节位置环的灵敏度。
b)I增益:是位置环的积分增益,用于调节位置环的稳定性。
c)D增益:是位置环的微分增益,用于调节位置环的响应速度。
二、参数设定步骤进行安川伺服参数设定的一般步骤如下:2.1设置速度环参数a)调整P增益:从一个较小的值开始逐渐增大,直到达到理想的速度响应。
b)调整I增益:从一个较小的值开始逐渐增大,直到达到理想的速度稳定性。
c)调整D增益:根据实际应用需求进行微调,以达到更好的速度控制效果。
2.2设置位置环参数a)调整P增益:从一个较小的值开始逐渐增大,直到达到理想的位置响应。
b)调整I增益:从一个较小的值开始逐渐增大,直到达到理想的位置稳定性。
c)调整D增益:根据实际应用需求进行微调,以达到更好的位置控制效果。
2.3保存参数在完成参数设定后,需要将参数进行保存,以便下次使用时可以直接加载使用。
三、注意事项在进行安川伺服参数设定时,需要注意以下几点:3.1应用类型选择根据实际应用需求选择伺服驱动器的应用类型,包括位置控制、速度控制和力矩控制等。
3.2参数范围设置根据实际系统的特点和要求,设置参数的合理范围,避免参数设定过大或过小导致的系统不稳定。
3.3参数调整顺序在进行参数调整时,一般先调整速度环参数,再调整位置环参数。
因为速度环是位置环的基础,速度环参数设定好后再进行位置环参数的调整会更加方便和稳定。
安川伺服参数操作器操作方法
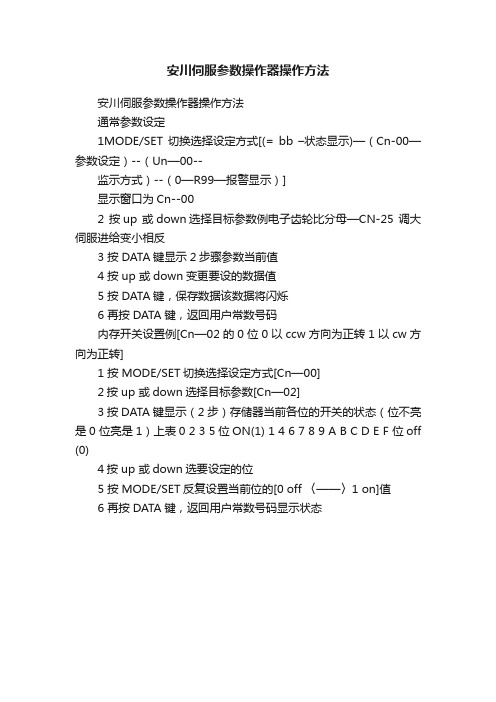
安川伺服参数操作器操作方法
安川伺服参数操作器操作方法
通常参数设定
1MODE/SET切换选择设定方式[(= bb –状态显示)—(Cn-00—参数设定)--(Un—00--
监示方式)--(0—R99—报警显示)]
显示窗口为Cn--00
2 按up 或down选择目标参数例电子齿轮比分母—CN-25 调大伺服进给变小相反
3 按DATA键显示2步骤参数当前值
4 按up 或down变更要设的数据值
5 按DATA键,保存数据该数据将闪烁
6 再按DATA键,返回用户常数号码
内存开关设置例[Cn—02的0位0以ccw方向为正转1以cw方向为正转]
1 按MODE/SET切换选择设定方式[Cn—00]
2按up 或down选择目标参数[Cn—02]
3按DATA键显示(2步)存储器当前各位的开关的状态(位不亮是0 位亮是1)上表0 2 3 5位ON(1) 1 4 6 7 8 9 A B C D E F 位off (0)
4按up 或down选要设定的位
5 按MODE/SET反复设置当前位的[0 off 〈——〉1 on]值
6 再按DATA键,返回用户常数号码显示状态。
安川伺服电机参数基本调整

安川伺服电机参数基本调整安川伺服电机是一种常见的电机控制设备,广泛应用于机械设备中。
在使用过程中,需要根据具体的应用需求对伺服电机的参数进行基本调整,以实现更好的运动性能和控制效果。
下面将介绍一些常见的安川伺服电机参数基本调整方法。
1.转矩限制参数调整:转矩限制参数是指电机在运行中所能输出的最大转矩。
根据实际需求,可以适当调整转矩限制参数,以达到所需的运动效果。
一般来说,如果转矩限制设置得过大,容易导致电机过载;而设置得过小,则可能无法满足实际应用需求。
因此,在进行参数调整时,需要根据具体应用场景进行合理设置。
2.速度限制参数调整:速度限制参数是指电机在运行中所能达到的最大速度。
在使用伺服电机时,常常需要对其运动速度进行控制,以满足实际需求。
通过调整速度限制参数,可以控制电机的最大速度。
一般来说,速度限制设置得过大,可能会导致电机运行不稳定;设置得过小,则无法满足实际要求。
因此,在进行参数调整时,需要综合考虑电机的性能和实际需求。
3.比例增益参数调整:比例增益是伺服电机控制中的重要参数,用于控制电机响应速度和稳定性。
在进行比例增益参数调整时,需要注意以下几点:首先,增益设置得太小,可能会导致电机响应迟钝;设置得太大,则容易导致电机振荡或不稳定。
其次,在调整时应尽量使电机响应速度和运动稳定性达到一个合理的平衡。
最后,比例增益参数一般需要根据具体应用需求进行调整。
4.调整滤波时间常数参数:滤波时间常数参数是伺服电机控制中的一个重要参数,用于抑制电机输出信号的高频噪声。
在进行滤波时间常数参数调整时,需要注意以下几点:首先,滤波时间常数设置得过小,可能会导致电机输出信号的噪声没有得到有效抑制;设置得过大,则会影响电机的运行性能。
其次,应根据具体应用需求进行合理调整,以满足实际要求。
5.调整位置环参数:位置环是伺服电机控制中的一个重要环节,用于实现位置的准确控制。
在进行位置环参数调整时,需要注意以下几点:首先,位置环控制的稳定性对电机性能影响较大,因此在设置参数时应尽量提高稳定性。
全面解析安川伺服参数设定的步骤与流程

全面解析安川伺服参数设定的步骤与流程安川伺服参数设定是工业自动化领域中非常重要的步骤,它涉及到伺服系统的性能和工作效率。
本文将从基本概念、步骤和流程以及注意事项等方面全面解析安川伺服参数设定的内容,以帮助读者更好地了解和应用该过程。
一、基本概念安川伺服参数是指用于调整伺服运动控制的各种参数设置,包括速度、加速度、减速度、位置误差补偿等。
通过对这些参数的设定,可以使得伺服系统能够更好地适应不同的工况需求。
二、步骤与流程1. 确定应用需求:在进行伺服参数设定之前,首先需要了解伺服系统的应用场景和需求。
例如,是需要高速运动还是高精度定位,需要考虑的因素包括负载大小、工作环境等。
2. 确定基本参数:根据应用需求,确定伺服系统的基本参数,包括速度、加速度和减速度等。
这些参数将决定伺服系统的运动性能,对于不同的应用场景需要进行合理的设置。
3. 进行位置校准:在设定伺服参数之前,需要先进行位置校准,以确保伺服系统的准确性。
可以通过使用编码器或者其他位置传感器来完成位置校准。
4. 设定速度参数:根据应用需求和系统特性,设定伺服系统的速度参数。
速度参数主要包括预设速度、最大速度和加速度等。
需要综合考虑负载要求和机械特性确定适合的设定值。
5. 设定位置控制参数:根据应用需求和机械系统特性,设定伺服系统的位置控制参数。
这些参数包括位置环增益、速度补偿和位置误差补偿等。
6. 设定力矩控制参数:如果应用需要力矩控制,还需要设定相应的力矩控制参数。
力矩控制参数可根据负载要求和运动特性进行合理设定。
7. 调试和优化:完成参数设定后,需要进行调试和优化,以确保系统的稳定性和运动精度。
可以通过实际运动测试和观察等方式进行调试,根据实际效果进行参数微调。
三、注意事项1. 设定伺服参数需要有一定的专业知识和经验,建议在有相关技术背景的人员的指导下进行操作。
2. 在设定参数之前,需要确保伺服系统的硬件和软件状态正常,并进行必要的检查和维护。
安川伺服电机PID参数调整流程
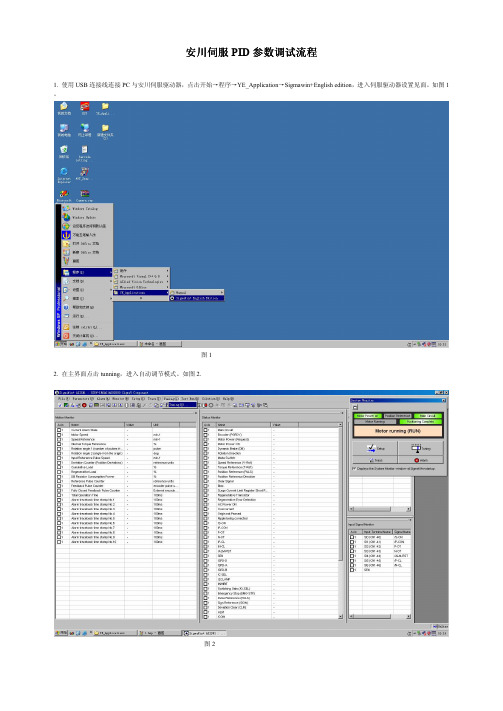
安川伺服PID参数调试流程1. 使用USB连接线连接PC与安川伺服驱动器,点击开始→程序→YE_Application→Sigmawin+English edition,进入伺服驱动器设置见面。
如图1 。
图12. 在主界面点击tunning,进入自动调节模式。
如图2.3.点击执行按钮,进入惯性调试界面,如图4所示,使用默认设置,点击NEXT,进入下一界面。
如图5所示。
图44.在图5界面,点击START ,再点击NEXT进入下一界面。
注意该步由于电机会自行运动距离,所以在运动前,需要确定电机在运动轴的中间位置。
图55.点击Servo On按钮,再交替点击Forward按钮和Reverse按钮,电机会进行正反运动,将会对机械惯量进行自动计算。
完成以后,两个按钮变灰,不能使用,在右下角将会显示计算出来的新的惯量值。
点击NEXT,进入下一步设置。
如图6所示图66. 在图7所示界面,点击writing result,把惯量参数写驱动器。
图77. 写入完成,将进入如下界面。
如图8所示,点击选择NO reference input选项,再点击AUTOTUNING按钮,进入下一步调试。
图88. 如图9所示,在distance框下,设置运动范围,默认为24*1000,当确定运行距离足够大的时候保持默认值,当运行距离小于该值的时候,请设置该值到20*1000,并勾选TUNING PARAMETERS框的选项。
点击下一步。
图99. 点击Servo ON,再点击Start tuning,伺服运动系统将在一定距离上来回运动,整过过程电机可能发出震动的噪音,为正常现象,自动调整完成后,点击finish,参数将自动写入驱动器。
如图10所示。
图1010. 当参数不满足性能要求的时候,点击parameters→edit parameters,从驱动器下载参数显示界面,如图11所示。
图1111.根据情况调整参数pn100,pn101,pn102,pn103,如图12所示,具体参数意义及调整方法见下面说明。
安川伺服电机参数基本调整

安川伺服电机参数基本调整动态参数调整步骤:步骤一.设定系统刚性(Fn 001)Kp : 位置回路比例增益(机床Kp 建议值30-90 /sec)Kv : 速度回路比例增益(机床Kv 建议值30-120 Hz)Ti : 速度回路积分增益(机床Ti 建议值10-30 ms)范例:步骤二. 自动调协(auto turning) 寻找马达与机床惯性比自动调协目的,主要是在计算马达与机床整合后有些动态参数会受到影响ex: 马达负载惯性比… ,如果不先将相关参数找出速度回路的表现会与Kv/Ti 设置的结果不一致自动调协操作步骤:1.参数Pn110设11。
(打开在线自动调谐功能)2.手动Jog床台让床台来回往复多次运行。
3.手动Jog床台时如发生共振现象,请立即压下紧急停止按钮,将驱动器参数Pn408设1(打开共振抑制功能),然受修正Pn409(共振抑制频率)设定,1米加工中心机建议Pn409设定200。
4.将Fn007内容写入EEPROM。
(按Mode键至Fn000→按Up或Down键至Fn007→持续按Data 键1秒显示负载贯性比→持续按Set键1秒后Fn007内容显示之负载贯量比即可写入EEPROM)5.参数Pn110设12。
(关闭在线自动调谐功能)步骤三.起动并设定驱动器抑制共振功能相关参数(Pn408设1即打开共振抑制功能,Pn409可设定共振抑制频率) 马达与机床结合后,除了马达选用太小,无法达到高响应之外,有时也会发生马达扭力够,但是因为机床床台传动刚性较差,会产生共振而无法达到高响应又平顺的控制目标,此时,除了加强机床的传动刚性外,可利用控制器抑制共振功能,而得到高响应的结果 .步骤四. 将速度回路增益参数再调高就位置回路控制而言,速度回路是内回路,内回路响应越高,外回路(位置回路)表现越如预期,比较不会受到外界切削力,磨擦力的影响,所以在切削应用场合,请将速度回路增益尽量调高,以得到更好的切削质量YASKAWA伺服參數設定說明:备注: 1、带* 为驱动器必须设定的参数,马达才能正常运转!2、首先设置驱动器的电子齿轮比Pn202 / Pn203和需要马达转一圈回授的脉冲数Pn201 计算方法如下:通常新代控制器所设精度单位1um/Pules (可在系统参数17中设所需精度单位)通常新代控制器所设的倍频数是4 倍(可在系统参数81~100中所设轴卡的倍频)计算公式:电子齿轮比Pn202 / Pn203 = ﹝编码器的脉冲数× 4 ×M﹞÷( 负载转一圈移动量脉冲数×N )M和N是指马达和工作台传动侧的机械齿轮比新代系统参数61~63 = 马达转一圈回授的脉冲数Pn201 = 负载转一圈移动量脉冲数÷控制器内部所设的倍频4****** ex:******当螺杆的节距是10mm 马达选用C 型17比特采用直传连轴器那齿轮比计算如下:负载转一圈移动量脉冲数= 10mm÷1um/Pules =104 PulesM / N = 1 / 1Pn202 / Pn203 = (32768×4×1 ) ÷(104 ×1 ) = 8192 / 625Pn201 = 104 ÷ 4 = 2500 Pules2、设定上表中的驱动器参数,值为后面的设定值;Pn201、Pn202、Pn203为上面公式根据实际情况计算出来的值;Pn100、Pn101、Pn102先不修改数值,为出厂值;3、调整机台的刚性,先进行X、Y、Z 轴的来回运动,通过增大Fn001驱动器参数值,按加1数值增大;通常调节到机台出现震动或有声音后,降回原一级。
安川伺服参数设定

安川伺服参数设定一、伺服参数设定的目的和重要性伺服参数设定的目的是通过调整伺服驱动器的参数,使驱动器能够更好地与传动机构和机械装置配合,确保系统的动态响应和控制精度,提高工作效率和精度。
伺服参数设定是伺服系统调试和性能优化的关键步骤,对于确保系统的正常运行和提高生产效率具有重要意义。
二、伺服参数设定的方法和步骤伺服参数设定的方法和步骤主要包括以下几个方面:1.前期工作准备在开始伺服参数设定之前,需要清楚地了解伺服系统的工作原理和性能要求。
同时,需要对伺服驱动器和伺服电机进行正确的接线和配置,确保驱动器和电机之间的通信和控制有效。
2.系统标定系统标定是指通过对伺服系统进行一系列测试和数据采集,获取系统的动态响应特性和传动机构的静态特性。
常见的系统标定参数包括位置环、速度环、加速环等。
3.参数优化通过对系统标定数据的分析和处理,可以优化伺服系统的参数,使其能够更好地适应实际应用需求。
参数优化主要包括位置环增益、速度环增益、加速环增益等。
4.参数设定在参数优化的基础上,根据具体应用需要,对伺服驱动器进行参数设定。
参数设定主要包括电机参数(如极数、电机额定转矩、电机最大转速等)、速度环参数(如速度环增益、速度环带宽等)、位置环参数(如位置环增益、位置环带宽等)。
5.测试和调试在完成伺服参数设定之后,需要对系统进行全面的测试和调试,以确保系统的性能和稳定性。
测试和调试主要包括对系统的速度响应、位置跟踪精度、扭矩输出等方面进行检验。
三、伺服参数设定的注意事项在进行伺服参数设定的过程中,需要注意以下几个方面:1.合理选取参考值在设定伺服参数时,需要根据实际应用需求合理选择参考值,确保系统能够达到预期性能。
参考值过小或过大都可能导致系统出现不稳定现象。
2.学习型自整定功能的应用安川伺服驱动器通常具有学习型自整定功能,可以通过学习系统的特性自动调整参数。
在使用学习型自整定功能时,需要确保系统运行在典型的工作状态下,避免因为特殊状态造成参数的不准确或过于保守。
安川伺服驱动器增益设置方法

3.关于装置(5)
3‐2. SigmaWin的机械分析和振动的关系
3.关于装置(6)
3‐3.具有代表性构造的机械特性 3-3-1.滚珠丝杠结构 滚珠丝杠结构的场合, 机械分析的结果产生2个(以上)峰值。 并且,各自的振动如下。 (a)在滚珠丝杠的螺母部的 刚性体(旋转)运动 (频率较低的峰值) (b)滚珠丝杠・联轴器的扭转共振 (频率较高的峰值)
<由控制不稳定引起的振动的辨别方法> 减小转矩滤波器(Pn401等)的时间常数→振动(声音)改善
重要
4.关于振动的对策(4)
4‐3.因惯性力引起的装置的摇摆
<因惯性力引起的装置的摇摆的辨别方法> 增大指令滤波器的时间常数→摇动变小
重要
伺服调整基本是按照 通过调整支持功能进行调整 手动调整
5.伺服调整的方法 其他(1)
5‐2.关于手动调整 5-2-3.为抑制由惯性力引起的装置摇摆的手动调整
加振力小
5.伺服调整的方法 其他(2)
5‐2.关于手动调整 5-2-4.为抑制由于受输入指令的影响而引起的振动的手动调整
指令更新周期缓慢指令呈阶梯状
重要
说明关于组合伺服和装置时发生的振动。另外介绍具有代表性构造的机械特性。
1
3‐1.装置的振动,伺服的振动
2
3‐2. SigmaWin的机械分析和振动的关系
3
3‐3.具有代表性构造的机械特性
4
3.关于装置(1)
3.关于装置(2)
缓慢动作 装置和伺服一同 动作
3‐3.具有代表性构造的机械特性
3-3-2.皮带构造 皮带构造的场合, 机械分析的结果产生1个峰值。 其特点是峰顶和峰谷之间的频率差以 及增益・相位的变化比较大。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
安川伺服電機在線自動調諧設定用戶常數的步驟:
1:開機將機械剛性Fn001設定為4,慣性比Pn103設定為0 ;
2:運行常時調諧設定Pn110.0為1 ;
3:以常運行時速度,手動移動,來回移動約5分鐘;
4:若運行不良,有震動,則調整粘性摩擦補償功能選擇Pn110.2為1(粘性摩擦補償:小),按照步驟3試運行;
5:若運行不良,調整機械剛性設定Fn001,範圍為1-10,重複步驟3進行試運行,直至運行較好后進行下一步驟;
5:將在線自動調諧結果保存,保存步驟為:按下MODE/SET鍵選擇F007后,按下DATA/SHFIT鍵后按下MODE/SET鍵,DONE 閃爍1秒鐘,即保存完畢。
6:按照步驟3試運行電機,若有震動響聲,將Pn110.0設定為2(不進行在線自動調諧)后,將扭矩指令濾波器時間常數Pn401(單位0.01ms)設置為500 7:若有疑問,請查閱說明書章節6.3.1, 6.3.2,6.3.3,6.3.4, 6.1.5。