uboot下LED点亮linux
UBOOT命令详解
常用U-boot命令详解(z)2010-09-30 15:05:52| 分类:学习心得体会|字号订阅U-boot发展到现在,他的命令行模式已经非常接近Linux下的shell了,在我编译的U-boot-2009.11中的命令行模式模式下支持“Tab”键的命令补全和命令的历史记录功能。
而且如果你输入的命令的前几个字符和别的命令不重复,那么你就只需要打这几个字符即可,比如我想看这个U-boot的版本号,命令就是“ version”,但是在所有的命令中没有其他任何一个的命令是由“v”开头的,所以只需要输入“v”即可。
[u-boot@MINI2440]# versionU-Boot 2009.11 ( 4月04 2010 - 12:09:25)[u-boot@MINI2440]# vU-Boot 2009.11 ( 4月04 2010 - 12:09:25)[u-boot@MINI2440]# baseBase Address: 0x00000000[u-boot@MINI2440]# baBase Address: 0x00000000由于U-boot支持的命令实在太多,一个一个细讲不现实,也没有必要。
所以下面我挑一些烧写和引导常用命令介绍一下,其他的命令大家就举一反三,或者“help”吧!(1)获取帮助命令:help 或?功能:查看当前U-boot版本中支持的所有命令。
[u-boot@MINI2440]#help?- alias for'help'askenv - get environment variables from stdinbase - print or set address offsetbdinfo - print Board Info structurebmp - manipulate BMP image databoot - boot default, i.e., run 'bootcmd'bootd - boot default, i.e., run 'bootcmd'bootelf - Boot from an ELF image in memorybootm - boot application image from memorybootp - boot image via network using BOOTP/TFTP protocolbootvx - Boot vxWorks from an ELF imagecmp - memory compareconinfo - print console devices and informationcp - memory copycrc32 - checksum calculationdate - get/set/reset date &timedcache - enable or disable data cachedhcp - boot image via network using DHCP/TFTP protocol echo - echo args to consoleeditenv - edit environment variableeeprom - EEPROM sub-systemerase - erase FLASH memoryexit-exit scriptfatinfo - print information about filesystemfatload - load binary file from a dos filesystemfatls -list files in a directory (default/)flinfo - print FLASH memory informationfsinfo - print information about filesystemsfsload - load binary file from a filesystem imagego - start application at address 'addr'help - print online helpi2c - I2C sub-systemicache - enable or disable instruction cacheiminfo - print header information for application image imls -list all images found in flashimxtract- extract a part of a multi-imageitest -return true/false on integer compareloadb - load binary file over serial line(kermit mode) loads - load S-Record file over serial lineloadx - load binary file over serial line(xmodem mode) loady - load binary file over serial line(ymodem mode) loop - infinite loop on address rangels -list files in a directory (default/)md - memory displaymm - memory modify (auto-incrementing address)mmc - MMC sub-systemmtest - simple RAM read/write testmw - memory write(fill)nand - NAND sub-systemnboot - boot from NAND devicenfs - boot image via network using NFS protocolnm - memory modify (constant address)ping -send ICMP ECHO_REQUEST to network hostprintenv- print environment variablesprotect - enable or disable FLASH write protection rarpboot- boot image via network using RARP/TFTP protocol reginfo - print register informationreset- Perform RESET of the CPUrun - run commands in an environment variablesaveenv - save environment variables to persistent storage setenv -set environment variablesshowvar - print local hushshell variablessleep- delay execution for some timesource - run script from memorytest- minimal test like /bin/shtftpboot- boot image via network using TFTP protocolunzip - unzip a memory regionusb - USB sub-systemusbboot - boot from USB deviceversion - print monitor version以bmp指令为例:Usage:bmp info <imageAddr>- display image infobmp display <imageAddr>[x y]- display image at x,y[u-boot@MINI2440]# h bmbmp - manipulate BMP image dataUsage:bmp info <imageAddr>- display image infobmp display <imageAddr>[x y]- display image at x,y(2)环境变量(environment variables,简称ENV)与相关指令和shell类似,U-Boot也有环境变量。
uboot 传统led驱动写法
uboot 传统led驱动写法
传统的U-Boot LED驱动通常是通过对硬件寄存器的直接操作来实现的。
在U-Boot中,LED驱动通常包括以下几个方面的内容:
1. 硬件初始化,在U-Boot启动过程中,需要对与LED相关的硬件进行初始化,包括设置相应的寄存器、引脚复用等操作。
2. LED控制接口,U-Boot通常会提供一些API或者函数接口,用于控制LED的开关、亮度和闪烁等操作。
这些接口通常会直接操作硬件寄存器来实现对LED的控制。
3. 设备树配置,在一些新的U-Boot版本中,设备树已经成为了描述硬件信息的标准方式。
因此,针对一些新的硬件平台,需要在设备树中添加LED相关的描述信息,以便U-Boot能够正确识别和初始化LED硬件。
4. 编译配置,在配置U-Boot编译选项时,需要确保使能了LED驱动相关的配置选项,以便将LED驱动代码编译进U-Boot镜像中。
总的来说,传统的U-Boot LED驱动编写涉及到硬件初始化、驱动代码编写、设备树配置和编译选项配置等多个方面。
针对具体的硬件平台和LED驱动需求,具体的编写方式会有所不同,但通常都会涉及到上述几个方面。
一起学mini2440裸机开发(一)--第一个led灯点亮

一起学mini2440裸机开发(一)--第一个led灯点亮开发板:mini2440,NandFlash:K9F2G08U0B 256M大小,CPU:S3C2440A 。
开发环境:MDK4.11仿真器:Jlink v8这是我用csdn发表的第一个文章,之前使用过arm-linux-gcc裸机开发mini2440,但是很多函数什么的不能直接调用(我的技术问题),准备重新整理一下ARM裸机,整理好之后准备下一阶段学习。
关于软件MDK4.11和它的注册机,我传不上去,说是由于文件太大,又想要的直接加Q470868560要就行了。
下面开始我们的第一个LED灯的点亮程序吧!1、新建一个项目工程双击MDK图标进入开发环境,如下图,单击Project/New uVision Project,选择你要创建文档的位置,文档名为test,单击保存选择CPU为Samsung/S3C2440A,单击OK单击完OK按钮后,咱们先看一下原来的空test文件夹里多了什么文件,当然你也可以不用看,我是看看MDK到底是默认给咱们提供了什么方便,下图为单击OK后多出的文档很容易看出多出来一个test工程文档。
在上一步单击完OK后,会弹出下图,该图是为了让你选择是不是将Samsung S3C2440的启动代码复制添加的你的工程文档。
这段启动代码咱们以后分析,在这里先选择“是”选择“是”后,一个工程文档建好了,如下图所示。
你看上图,可以看到工程文档自动添加了S3C2440.s,这就是上一步选择“是”后自动添加的启动代码,咱们再看看test文件夹里多了什么文件。
很容易可以看出多了三个文件,其中一个就是S3C2440.s,这个代码很重要啊。
咱们现在先不管他,接着下一步。
2、新建一个文件。
选择File/New,新建一个文件。
将该文件保存并命名为test1,注意后面要加后缀.c,单击保存将test1.c文件添加到你的工程,对着Source Group1右击,选择“Add Files to Group "Source Group 1"...”选择刚才建立的test1.c,单击Add,该文件就被加到了工程中。
uboot dm-gpio使用方法以及工作流程

uboot dm-gpio使用方法以及工作流程1. 引言1.1 介绍【引言】uboot dm-gpio是uboot中的一个驱动模块,用于控制板上的GPIO(General Purpose Input/Output)引脚。
GPIO引脚在嵌入式系统中起着非常重要的作用,可以用于控制外设、传输数据、进行通信等功能。
uboot dm-gpio模块可以帮助开发人员在bootloader阶段对GPIO进行操作,这在嵌入式系统的启动过程中是非常关键的。
本篇文章将介绍uboot dm-gpio的概述、使用方法、工作流程以及示例和注意事项。
读者可以通过学习本文了解如何在uboot中使用dm-gpio模块来控制GPIO,并且掌握一些使用上的注意事项,从而更好地应用于自己的嵌入式系统开发中。
1.2 背景在嵌入式系统开发中,GPIO(General Purpose Input/Output)是一种非常常用的接口,用于控制外部设备和传感器。
在嵌入式系统中,引导加载程序(Bootloader)的选择至关重要,因为它负责初始化硬件设备和加载操作系统。
U-Boot是一种常用的开源引导加载程序,它支持多种处理器架构和嵌入式设备。
随着U-Boot的不断发展,新的GPIO框架被引入,称为`dm-gpio`,它提供了更强大和灵活的GPIO控制接口。
`dm-gpio`通过设备模型(Device Model)的方式管理GPIO设备,使得开发者可以更方便地管理和控制GPIO。
在使用`dm-gpio`之前,开发者需要了解其概念、使用方法和工作流程,以确保正确地配置和操作GPIO接口。
本文将介绍`dm-gpio`的概念、使用方法和工作流程,同时给出一个示例来演示如何在U-Boot中使用`dm-gpio`来控制GPIO。
我们还会提供一些注意事项,帮助开发者避免常见的问题和错误。
2. 正文2.1 uboot dm-gpio概述在U-Boot中,dm-gpio是一个设备模型中的GPIO控制器,用于控制通用输入输出端口。
Linux和Uboot下eMMCboot分区读写
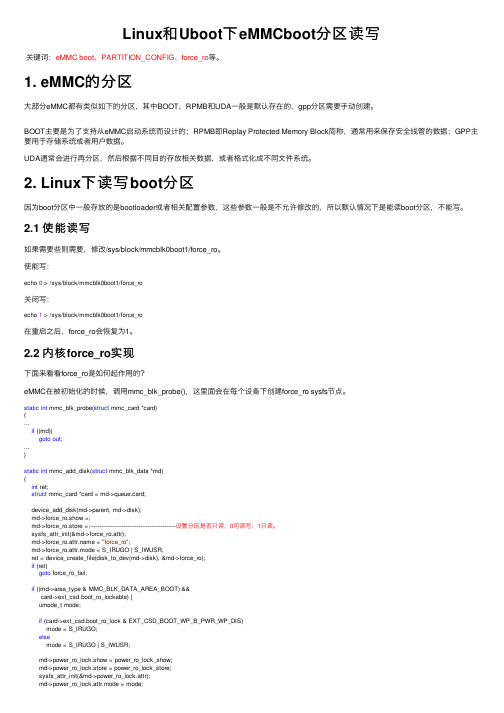
Linux和Uboot下eMMCboot分区读写关键词:eMMC boot、PARTITION_CONFIG、force_ro等。
1. eMMC的分区⼤部分eMMC都有类似如下的分区,其中BOOT、RPMB和UDA⼀般是默认存在的,gpp分区需要⼿动创建。
BOOT主要是为了⽀持从eMMC启动系统⽽设计的;RPMB即Replay Protected Memory Block简称,通常⽤来保存安全线管的数据;GPP主要⽤于存储系统或者⽤户数据。
UDA通常会进⾏再分区,然后根据不同⽬的存放相关数据,或者格式化成不同⽂件系统。
2. Linux下读写boot分区因为boot分区中⼀般存放的是bootloader或者相关配置参数,这些参数⼀般是不允许修改的,所以默认情况下是能读boot分区,不能写。
2.1 使能读写如果需要些则需要,修改/sys/block/mmcblk0boot1/force_ro。
使能写:echo 0 > /sys/block/mmcblk0boot1/force_ro关闭写:echo 1 > /sys/block/mmcblk0boot1/force_ro在重启之后,force_ro会恢复为1。
2.2 内核force_ro实现下⾯来看看force_ro是如何起作⽤的?eMMC在被初始化的时候,调⽤mmc_blk_probe(),这⾥⾯会在每个设备下创建force_ro sysfs节点。
static int mmc_blk_probe(struct mmc_card *card){...if ((md))goto out;...}static int mmc_add_disk(struct mmc_blk_data *md){int ret;struct mmc_card *card = md->queue.card;device_add_disk(md->parent, md->disk);md->force_ro.show =;md->force_ro.store =;----------------------------------------------设置分区是否只读,0可读写;1只读。
ledctl命令用法

ledctl命令用法LED(Light Emitting Diode,发光二极管)是一种常见的电子元件,广泛用于指示灯、显示屏等场景。
为了管理和控制LED的状态,我们可以使用ledctl命令来完成各种操作。
本文将介绍ledctl命令的基本用法以及常见的操作场景。
一、ledctl命令简介ledctl是一个Linux系统下的命令行工具,用于控制系统中的LED设备。
通过该命令,我们可以灵活地改变LED设备的状态,包括开启、关闭、设置亮度等。
ledctl命令的使用非常方便,只需提供相应的选项和参数即可完成操作。
二、ledctl命令的基本用法1. 查看系统中的LED设备要使用ledctl命令控制LED设备,首先需要了解系统中存在哪些LED设备。
可以通过以下命令查看系统中的LED设备列表:```ledctl -l```该命令会列出系统中所有的LED设备及其对应的编号和路径。
2. 开启和关闭LED设备使用ledctl命令可以方便地开启和关闭LED设备。
具体操作如下:```ledctl -n <设备编号> onledctl -n <设备编号> off```其中,<设备编号>为具体的LED设备编号,可以通过上一步骤获取到。
使用"on"参数可以将LED设备打开,使用"off"参数可以将LED 设备关闭。
3. 设置LED设备亮度某些情况下,我们可能需要调整LED设备的亮度级别。
ledctl命令提供了设置亮度的功能。
具体操作如下:```ledctl -n <设备编号> brightness <亮度级别>```其中,<设备编号>为具体的LED设备编号,<亮度级别>可以是一个介于0和255之间的整数。
根据设置的亮度级别,LED设备的亮度将会相应改变。
三、ledctl命令的常见操作场景1. 控制电源指示灯很多设备上都会有电源指示灯,通过ledctl命令可以方便地控制它的开关。
Linux内核背光backlight驱动架构文档
static void backlight_generate_event(struct backlight_device *bd, enum backlight_update_reason reason)
{ char *envp[2];
switch (reason) { case BACKLIGHT_UPDATE_SYSFS:
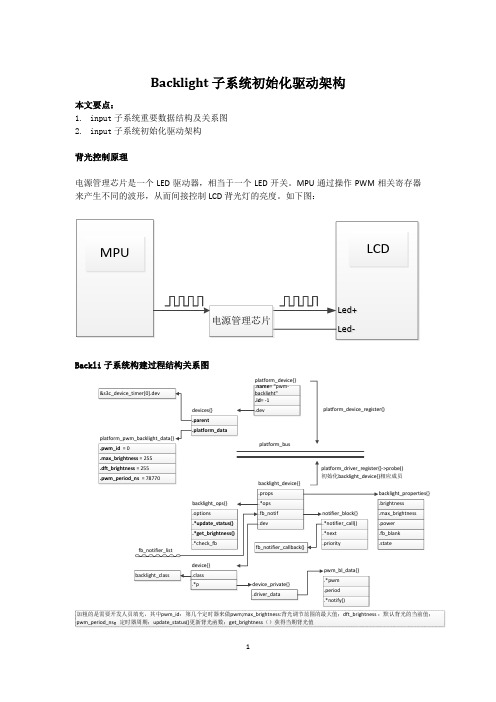
Backlight 子系统初始化驱动架构
本文要点: 1. input 子系统重要数据结构及关系图 2. input 子系统初始化驱动架构
背光控制原理
电源管理芯片是一个 LED 驱动器,相当于一个 LED 开关。MPU 通过操作 PWM 相关寄存器 来产生不同的波形,从而间接控制 LCD 背光灯的亮度。如下图:
backlight_class->dev_attrsdev_attrs = bl_device_attributes
backlight_class->dev_attrssuspend = backlight_suspend
backlight_class->dev_attrs =backlight_resume;
ppwwmm__bbll__ddaattaa{{}} .*pwm .period .*notify()
bbaacckklliigghhtt__pprrooppeerrttiieess{{}} .brightness .max_brightness .power .fb_blank .state
// data->pwm_id= smdk_backlight_device ->dev.platform_data->pwm_id pwm_bl_data ->pwm = pwm_request(data->pwm_id, "backlight"); // data->pwm_period_ns =smdk_backlight_device ->dev.platform_data->pwm_period_ns pb->period = data->pwm_period_ns
嵌入式linux小项目实例

嵌入式linux小项目实例以下是一个嵌入式Linux小项目的实例:控制LED灯。
项目描述:实现一个嵌入式Linux系统,通过控制GPIO口来控制LED灯的开关状态。
当输入一个命令时,LED灯会根据命令的参数进行相应的操作,例如点亮、熄灭或闪烁。
所需硬件:1. 嵌入式开发板(支持Linux系统)2. LED灯3. 面包板4. 杜邦线步骤:1. 连接硬件:将LED灯的正极连接到GPIO口,将负极连接到地线,确保电路连接正确。
2. 在嵌入式开发板上安装Linux系统,并配置好相应的开发环境(交叉编译工具链、GPIO驱动等)。
3. 创建一个C语言源文件,该文件包含LED灯的控制代码。
在代码中,需要通过GPIO驱动控制LED灯的开关状态。
4. 使用交叉编译工具链编译源文件生成可执行文件。
5. 将可执行文件拷贝到嵌入式开发板上。
6. 在嵌入式开发板上打开终端,运行可执行文件,通过命令行输入参数来控制LED灯的开关状态。
示例代码:```c#include <stdio.h>#include <fcntl.h>#include <unistd.h>#define LED_GPIO_PIN 17int main(int argc, char *argv[]) {int fd;char buf[2];fd = open("/sys/class/gpio/export", O_WRONLY);write(fd, "17", 2);close(fd);fd = open("/sys/class/gpio/gpio17/direction", O_WRONLY); write(fd, "out", 3);close(fd);fd = open("/sys/class/gpio/gpio17/value", O_WRONLY);if (strcmp(argv[1], "on") == 0) {write(fd, "1", 1);printf("LED turned on.\n");} else if (strcmp(argv[1], "off") == 0) {write(fd, "0", 1);printf("LED turned off.\n");} else if (strcmp(argv[1], "blink") == 0) {int i;for (i = 0; i < 10; i++) {write(fd, "1", 1);sleep(1);write(fd, "0", 1);sleep(1);}printf("LED blinked.\n");} else {printf("Invalid command.\n");}close(fd);fd = open("/sys/class/gpio/unexport", O_WRONLY);write(fd, "17", 2);close(fd);return 0;}```编译和运行:1. 使用交叉编译工具链编译源文件:```$ arm-linux-gnueabi-gcc -o led_control led_control.c```2. 将可执行文件拷贝到嵌入式开发板上。
uboot下LED点亮linux
按下“q”键,进入切换到uboot命令操作模式,即可输入各种命令
5.U-Boot下LED灯的控制
①在./common文件夹下新建cmd_led.c,并在此文件中添加如下内容
②在./common/Makefile中添加:
COBJS += cmd_led.o
③配置头文件在u-boot-mini6410/include/cmd_confdefs.h头文件中把命令CFG_CMD_CONSOLE替换成我们的命令CFG_CMD_LEDTEST。
成绩(百分制):(涂改无效)
教师:年 月 日
【实验报告】
实验目的:
1.掌握uboot的配置、编译方法
2.掌握uboot的源码结构,分得清一、二阶段
3.掌握uboot的烧录命令、tftp烧写方法
4.了解uboot的镜像制作方法
要求:
1.完成uboot开机LED1,LED3点亮;LED2,LED5灭
扩展:
C.nand write 0x50000000 0x0 0x80000
注释:把内存地址0x50000000的内存烧写到flash地址空间0x0~0x80000
D.reset
重启,执行新的uboot
实验总结:
在本次实验中,初步学会了uboot的配置、编译方法,uboot的烧录命令、tftp烧写方法,
了解了uboot的镜像制作方法。
1.增加一个uboot命令,通过uboot命令模式控制led的亮灭
实验步骤:
1.U-Boot源码目录
1.把u-boot-mini6410-20111018.tar.gz压缩包拷贝到Ubuntu虚拟机的工作目录下,然后使用tar -xf u-boot-mini6410-20111018.tar.gz命令解压。
gpio输出控制led灯闪烁实验原理

gpio输出控制led灯闪烁实验原理gpio输出控制LED灯闪烁实验原理引言:在物联网时代,嵌入式系统的应用越来越广泛。
而GPIO(General Purpose Input/Output)是嵌入式系统中最常用的接口之一。
本文将介绍如何利用GPIO输出控制LED灯的闪烁,并详细阐述实验原理。
一、实验材料准备:1. Raspberry Pi开发板2. 面包板3. 杜邦线4. LED灯(带有长脚和短脚)二、实验步骤:1. 将Raspberry Pi开发板与面包板连接,确保连接牢固。
2. 将LED灯的长脚连接到GPIO引脚17,短脚连接到GND引脚。
3. 打开Raspberry Pi开发板,并登录系统。
4. 在终端中输入命令"gpio readall",查看GPIO引脚的状态。
5. 在终端中输入命令"gpio mode 0 out",将GPIO引脚0设置为输出模式。
6. 在终端中输入命令"gpio write 0 1",将GPIO引脚0输出高电平,LED灯亮起。
7. 在终端中输入命令"gpio write 0 0",将GPIO引脚0输出低电平,LED灯熄灭。
8. 重复步骤6和7,LED灯将会不断闪烁。
三、实验原理:在本实验中,我们利用GPIO输出控制LED灯的闪烁。
GPIO引脚可以通过软件程序来控制其输出状态,从而控制连接在其上的外部设备。
在Raspberry Pi开发板上,GPIO引脚可以通过命令行工具gpio来进行控制。
LED灯是一种二极管,具有正极和负极。
当正极接收到高电平信号时,LED灯会发光;当正极接收到低电平信号时,LED灯不发光。
Raspberry Pi开发板上的GPIO引脚可以输出高电平(3.3V)和低电平(0V),因此可以通过控制GPIO引脚的输出状态来控制LED 灯的亮灭。
在本实验中,我们将GPIO引脚0设置为输出模式,并通过命令"gpio write 0 1"将其输出高电平,LED灯亮起;通过命令"gpio write 0 0"将其输出低电平,LED灯熄灭。
ledctl命令用法
ledctl命令用法ledctl命令是一个用于控制LED灯的命令行工具,它运行在Linux系统上。
它允许用户控制和管理与系统相关的LED灯(例如硬盘活动指示灯、电源指示灯等)的行为。
通过ledctl命令,用户可以更改LED灯的亮度、频率、闪烁模式等。
以下是一些常用的ledctl命令用法:1.查看系统上的LED灯列表这个命令将列出系统上存在的所有LED灯的名称和路径。
2.查看特定LED灯的当前状态<LED名称>是所需LED灯的名称。
此命令将返回该LED灯的当前状态,包括亮度、频率、闪烁模式等。
3.设置特定LED灯的亮度<LED名称>是所需LED灯的名称,<亮度值>是要设置的亮度级别(0-255)。
此命令将更改该LED灯的亮度。
4.设置特定LED灯的频率<LED名称>是所需LED灯的名称,<频率值>是要设置的频率(以Hz为单位)。
此命令将更改该LED灯的闪烁频率。
5.设置特定LED灯的闪烁模式<LED名称>是所需LED灯的名称,<闪烁模式>是要设置的闪烁模式。
可用的闪烁模式包括none(无闪烁)、heartbeat(心跳闪烁)、ide-disk(硬盘活动指示灯模式)等。
6.同时设置多个LED灯的状态这个命令允许同时更改多个LED灯的状态。
用户可以通过添加多个"--set-leds <LED名称> --brightness <亮度值>"参数来设置不同的LED 灯的亮度。
7.恢复LED灯的默认状态这个命令用于恢复所有LED灯的默认状态。
以上是一些常用的ledctl命令用法。
通过这些命令,用户可以轻松地控制和管理系统上的LED灯,并根据需要进行自定义设置。
用户还可以通过man ledctl命令查看完整的ledctl命令文档,了解更多高级用法和选项。
Tiny-S3C6410_Linux下LED灯驱动移植过程
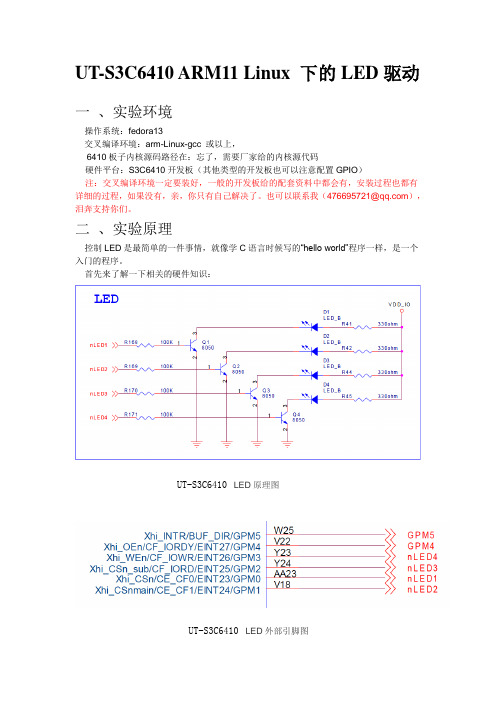
UT-S3C6410 ARM11 Linux 下的LED驱动一、实验环境操作系统:fedora13交叉编译环境:arm-Linux-gcc 或以上,6410板子内核源码路径在:忘了,需要厂家给的内核源代码硬件平台:S3C6410开发板(其他类型的开发板也可以注意配置GPIO)注:交叉编译环境一定要装好,一般的开发板给的配套资料中都会有,安装过程也都有详细的过程,如果没有,亲,你只有自己解决了。
也可以联系我(****************),泪奔支持你们。
二、实验原理控制LED是最简单的一件事情,就像学C语言时候写的“hello world”程序一样,是一个入门的程序。
首先来了解一下相关的硬件知识:UT-S3C6410LED原理图UT-S3C6410LED外部引脚图从上面的原理图可以得知,LED与CPU引脚的连接方法如下,高电平点亮。
LED1 -GPM0LED2 -GPM1LED3 -GPM2LED4 -GPM3从数据手册可以找到相应的控制方法。
这里我们以LED1为例,介绍一下LED1的操作方法,其他的类似,请大家自行分析。
通过上面可以得知,需要先将GPM0设置为输出方式。
将寄存器GPMCON低四位配置成0001。
然后将GPMDAT寄存器的第0位置1灯亮,置LED0灯亮,开发板上有四个LED所以要对GPMDAT的低四位进行操作,就可以实现对灯的亮灭操作了。
三、实验步骤1、编写驱动程序mini6410_leds.c#include <linux/miscdevice.h>#include <linux/delay.h>#include <asm/irq.h>//#include <mach/regs-gpio.h>#include <mach/hardware.h>#include <linux/kernel.h>#include <linux/module.h>#include <linux/init.h>#include <linux/mm.h>#include <linux/fs.h>#include <linux/types.h>#include <linux/delay.h>#include <linux/moduleparam.h>#include <linux/slab.h>#include <linux/errno.h>#include <linux/ioctl.h>#include <linux/cdev.h>#include <linux/string.h>#include <linux/list.h>#include <linux/pci.h>#include <asm/uaccess.h>#include <asm/atomic.h>#include <asm/unistd.h>#include <mach/map.h>#include <mach/regs-clock.h>#include <mach/regs-gpio.h>#include <plat/gpio-cfg.h>#include <mach/gpio-bank-e.h>#include <mach/gpio-bank-k.h>#define DEVICE_NAME "leds"static long sbc2440_leds_ioctl(struct file *filp, unsigned int cmd, unsigned long arg) {switch(cmd) {unsigned tmp;case 0:case 1:if (arg > 4) {return -EINVAL;}tmp = readl(S3C64XX_GPKDAT);tmp &= ~(1 << (4 + arg));tmp |= ( (!cmd) << (4 + arg) );writel(tmp, S3C64XX_GPKDAT);//printk (DEVICE_NAME": %d %d\n", arg, cmd); return 0;default:return -EINVAL;}}static struct file_operations dev_fops = {.owner = THIS_MODULE,.unlocked_ioctl = sbc2440_leds_ioctl,};static struct miscdevice misc = {.minor = MISC_DYNAMIC_MINOR,.name = DEVICE_NAME,.fops = &dev_fops,};static int __init dev_init(void){int ret;{unsigned tmp;tmp = readl(S3C64XX_GPKCON);tmp = (tmp & ~(0xffffU<<16))|(0x1111U<<16); writel(tmp, S3C64XX_GPKCON);tmp = readl(S3C64XX_GPKDAT);tmp |= (0xF << 4);writel(tmp, S3C64XX_GPKDAT);}ret = misc_register(&misc);printk (DEVICE_NAME"\tinitialized\n");return ret;}static void __exit dev_exit(void){misc_deregister(&misc);}module_init(dev_init);module_exit(dev_exit);MODULE_LICENSE("GPL");MODULE_AUTHOR("FriendlyARM Inc.");(1)把Hello,Module 加入内核代码树,并编译一般编译2.6 版本的驱动模块需要把驱动代码加入内核代码树,并做相应的配置,如下步骤(注意:实际上以下步骤均已经做好,你只需要打开检查一下直接编译就可以了):Step1:编辑配置文件Kconfig,加入驱动选项,使之在make menuconfig 的时候出现打开linux-2.6.38/drivers/char/Kconfig 文件,添加如图所示:#====================cgf add===================================== config MINI6410_LEDStristate "LED Support for Mini6410 GPIO LEDs"depends on CPU_S3C6410default yhelpThis option enables support for LEDs connected to GPIO lineson Mini6410 boards.#================================================================== 保存退出,这时在linux-2.6.38 目录位置运行一下make menuconfig 就可以在DeviceDrivers Character devices 菜单中看到刚才所添加的选项了,按下空格键将会选择为<M>,此意为要把该选项编译为模块方式;再按下空格会变为<*>,意为要把该选项编译到内核中,在此我们选择<M>,如图,如果没有出现,请检查你是否已经装载了缺省的内核配置文件,(2)Makefile文件Step2:通过上一步,我们虽然可以在配置内核的时候进行选择,但实际上此时执行编译内核还是不能把mini6410_leds.c编译进去的,还需要在Makefile 中把内核配置选项和真正的源代码联系起来,打开linux-2.6.38-cgf/drivers/char/Makefile,obj-$(CONFIG_MINI6410_LEDS) += mini6410_leds.o添加并保存退出Step3:这时回到linux-2.6.38 源代码根目录位置,执行make modules,就可以生成我们所需要的内核模块文件drivers/char/mini6410_leds.ko 了,注意:执行make modules 之前,必须先执行make zImage,只需一次就可以了。
Uboot命令详解

U-Boot提供了更加详细的命令帮助,通过help命令还可以查看每个命令的参数说明。
由于开发过程的需要,有必要先把U-Boot命令的用法弄清楚。
接下来,根据每一条命令的帮助信息,解释一下这些命令的功能和参数。
1、bootmdKNLinux联盟bootm [addr [arg ...]]- boot application image stored in memorypassing arguments 'arg ...'; when booting a Linux kernel,'arg' can be the address of an initrd imagebootm命令可以引导启动存储在内存中的程序映像。
这些内存包括RAM和可以永久保存的Flash。
第1个参数addr是程序映像的地址,这个程序映像必须转换成U-Boot的格式。
第2个参数对于引导Linux内核有用,通常作为U-Boot格式的RAMDISK映像存储地址;也可以是传递给Linux内核的参数(缺省情况下传递bootargs环境变量给内核)。
dKNLinux联盟2、bootpbootp [loadAddress] [bootfilename]bootp命令通过bootp请求,要求DHCP服务器分配IP地址,然后通过TFTP协议下载指定的文件到内存。
第1个参数是下载文件存放的内存地址。
第2个参数是要下载的文件名称,这个文件应该在开发主机上准备好。
3、cmpcmp [.b, .w, .l] addr1 addr2 count- compare memorycmp命令可以比较2块内存中的内容。
.b以字节为单位;.w以字为单位;.l以长字为单位。
注意:cmp.b中间不能保留空格,需要连续敲入命令。
第1个参数addr1是第一块内存的起始地址。
第2个参数addr2是第二块内存的起始地址。
一步步教你移植uboot(超精华版)

#make gec2440_config #make 编译完成时最后两句如下:
arm-linux-objcopy -O srec u-boot u-boot.srec arm-linux-objcopy --gap-fill=0xff -O binary u-boot u-boot.bin 表示编译成功。
# if defined(CONFIG_S3C2410)
ldr r1, =0x7ff //0x3ff,根据 2410 芯片手册,INTSUBMSK 有 11 位可用,vivi 也是 0x7ff, u-boot 则是 0x3ff,不过芯片复位后所有中断都被屏蔽,故这无影响
ldr r0, =INTSUBMSK
>> 2
广州广嵌电子科技有限公司
u-boot移植要点 我们可以总结出bootloader的两大功能:
1 是下载功能,既通过网口、串口或者USB口下载文件到RAM中。 2 是对flash芯片的读写功能。 u-boot对S3C2440已经有了很好的支持,在移植过程中主要是完善u-boot对nand flash 的读写功能。 u-boot移植前的准备工作 1.下载源码 Uboot的源码可以从以下网址下载: /u-boot/u-boot-2009.11.tar.bz2?modtime=1134 752480&big_mirror=0 我们这里下载的是u-boot-2009.11.tar.bz2 工具链使用cross-4.1.2
samsung: 开发者/或经销商(vender)。
s3c24x0: 片上系统(SOC)。 板子起名叫gec2440,可以依自己的喜好修改
UBOOT引导Linux内核及向内核传递参数的方式

UBOOT引导Linux内核及向内核传递参数的⽅式 ⼀直以来没有想过有什么好的办法通过寄存器向内核传递参数,直到今天读UBOOT的实现⽅式。
在UBOOT中,引导内核最常⽤的⽅法是bootm命令,bootm命令可以引导“UBOOT格式”的内核。
先花点时间了解⼀下什么是“UBOOT格式”的内核吧:⽤UBOOT⾃带的mkimage命令⽣成的内核称为"UBOOT"格式的内核。
以下⾯这条命令为例: mkimage -n "Kernel 2.4.18" -A arm -O linux -T kernel -C none -a30007fc0 -e 30008000 -d 4020.bin vmlinux-2.4.18.img 其中与内核引导最密切的是-e 30008000,也就是内核的⼊⼝地址。
其它参数可以参考帮助信息。
其它UBOOT格式的内核与原来相⽐,只是进⾏(可选)了压缩,并在前⾯加了⼀个0x40⼤⼩的头。
这个头⾥放了内核的位置(0x30007fc0)和⼊⼝地址(0x30008000)和其它信息。
bootm命令执⾏时,先对头部信息等进⾏校验,然后把头信息放到⼀个结构⾥⾯。
最后根据内核类型调⽤相应的启动函数。
对于Linux⽽⾔就是do_bootm_linux,在启动函数⾥⾯,有这么⼀个操作:theKernel = (void (*)(int, int, uint))ntohl(hdr->ih_ep);,这是最关键的⼀个操作,将内核的⼊⼝地址0x30008000赋给了theKernel,在启动函数的最后,使⽤theKernel (0, bd->bi_arch_number, bd->bi_boot_params);启动内核。
根据传参规范,三个变量分别⽤r0,r1,r2传给内核,这样就巧妙地利⽤了函数指针进⾏了参数传递,实在是精妙!上⾯讲完了内核的引导及传参,需要引起注意的就是在使⽤mkimage命令⽣成内核时,-e后⾯的地址要⽐-a后⾯的地址偏移0x40,原因很简单,就不在细说了。
嵌入式实验一:LED灯点亮

嵌⼊式实验⼀:LED灯点亮实验⼀:LED灯程序⼀、实验环境开发机环境操作系统:ubuntu 12.04交叉编译环境:arm-linux-gcc 4.3.26410板⼦内核源码:linux-3.0.1⽬标板环境:OK6410-A linux-3.0.1⼆、实验原理image.png图1-OK6410LED原理图image.png图2-LED原理图从上⾯的原理图可以得知,LED与CPU引脚的连接⽅法如下,低电平点亮。
LED1 -GPM0LED2 -GPM1LED3 -GPM2LED4 -GPM3image.png通过上⾯可以得知,需要先将GPM0设置为输出⽅式。
将相应的寄存器进⾏配置。
然后将GPMDAT寄存器的第0位置0灯亮,置1灯灭。
三、实验代码1.编写驱动程序#include <linux/module.h>#include <linux/kernel.h>#include <linux/fs.h>#include <asm/uaccess.h> /* copy_to_user,copy_from_user */#include <linux/miscdevice.h>#include <linux/pci.h>#include <mach/map.h>#include <mach/regs-gpio.h>#include <mach/gpio-bank-m.h>#include <plat/gpio-cfg.h>#define LED_MAJOR 240int led_open(struct inode *inode, struct file *filp){unsigned tmp;tmp = readl(S3C64XX_GPMCON);tmp = (tmp & ~(0x7U << 1)) | (0x1U);writel(tmp, S3C64XX_GPMCON);printk("#########open######\n");return 0;}ssize_t led_read(struct file *filp, char __user *buf, size_t count, loff_t *f_pos){printk("#########read######\n");return count;}ssize_t led_write(struct file *filp, const char __user *buf, size_t count, loff_t *f_pos) {char wbuf[10];unsigned tmp;printk("#########write######\n");copy_from_user(wbuf, buf, count);switch (wbuf[0]){case 0: //offtmp = readl(S3C64XX_GPMDAT);tmp |= (0xfU);writel(tmp, S3C64XX_GPMDAT);break;case 1: //ontmp = readl(S3C64XX_GPMDAT);tmp &= ~(0xfU);writel(tmp, S3C64XX_GPMDAT);break;default:break;}return count;}int led_release(struct inode *inode, struct file *filp){printk("#########release######\n");return 0;}struct file_operations led_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,};int __init led_init(void){int rc;printk("Test led dev\n");rc = register_chrdev(LED_MAJOR, "led", &led_fops);if (rc < 0){printk("register %s char dev error\n", "led");return -1;}printk("ok!\n");return 0;}void __exit led_exit(void){unregister_chrdev(LED_MAJOR, "led");printk("module exit\n");return;}module_init(led_init);module_exit(led_exit);2.编写Makefile⽂件ifneq ($(KERNELRELEASE),)obj-m := driver_led.oelseKDIR := /work/linux-3.0.1all:make -C $(KDIR) M=$(PWD) modules ARCH=arm CROSS_COMPILE=arm-linux-clean:rm -f *.ko *.o *.mod.o *.mod.c *.symversendif3.编写测试⽂件#include <stdio.h>#include <sys/types.h>#include <sys/stat.h>#include <fcntl.h>int main (void){int fd;char buf[10]={0,1,0,1};fd = open("/dev/my_led",O_RDWR);if (fd < 0){printf ("Open /dev/my_led file error\n");return -1;}while(1){write(fd,&buf[0],1);sleep(1);write(fd,&buf[1],1);sleep(1);}close (fd);return 0;}四、实验步骤1、编译驱动程序和测试程序在终端中运⾏:#make命令,编译成功⽣⽣下列⽂件在终端中运⾏:#arm-linux-gcc test.c -o test,编译成功⽣成⽂件2、将⽂件拷贝到SD卡3、将SD卡插⼊到OK6410开发板中4、在OK6410终端中运⾏程序加载驱动:#insmod sdcard/driver_led.ko创建设备⽂件:# mknod /dev/my_led c 240 0运⾏测试⽂件:#./sdcard/test卸载驱动程序:#rmmod sdcard/driver_led.ko5、运⾏结果此时可以看到OK6410开发板的4个LED灯⼀直同时点亮,然后熄灭。
uboot内核移植和裁剪详细步骤
uboot内核移植和裁剪详细步骤-U-boot内核移植步骤:Linux 3.3.5系统移植1. 将arch/arm/mach-s3c6410/下的,mach-smdk6410.c cp为mach-my6410.c;2. 打开arch/arm/mach-s3c6410/下的Kconfig,仿照MACH_SMDK6410做一个菜单项:config MACH_MY6410bool "MY6410"select CPU_S3C6410select SAMSUNG_DEV_ADCselect S3C_DEV_HSMMCselect S3C_DEV_HSMMC1select S3C_DEV_I2C1select SAMSUNG_DEV_IDEselect S3C_DEV_FBselect S3C_DEV_RTCselect SAMSUNG_DEV_TSselect S3C_DEV_USB_HOSTselect S3C_DEV_USB_HSOTGselect S3C_DEV_WDTselect SAMSUNG_DEV_BACKLIGHTselect SAMSUNG_DEV_KEYPADselect SAMSUNG_DEV_PWMselect HAVE_S3C2410_WATCHDOG if WATCHDOGselect S3C64XX_SETUP_SDHCIselect S3C64XX_SETUP_I2C1select S3C64XX_SETUP_IDEselect S3C64XX_SETUP_FB_24BPPselect S3C64XX_SETUP_KEYPADhelpMachine support for the Pillar MY64103. 打开arch/arm/tools/mach-types文件,这里面存的是机器ID必须要和uboot里面的ID保持一致,将其283行复制添加在后面并修改为: smdk6410MACH_SMDK6410 SMDK6410 1626 xx6410 MACH_XX6410 XX6410 1626 这个机器ID和UBOOT里的机器ID相同时才能启动内核;1. 修改BSP文件mach-my6410.c,内容如下:将mach-mach-my6410.c文件中的所有smdk6410改成my6410(不要改大写SMDK6410的)MACHINE_START(MY6410, "MY6410")//这个要和Kconfig里的MACH-MY6410匹配 2. 在当前目录的Makefile最后一行加上 obj-$(CONFIG_MACH_MY6410) += mach-my6410.o3. 修改顶层的Makefile:ARCH ?= armCROSS_COMPILE ?= /usr/local/arm/4.2.2-eabi/usr/bin/arm-linux- 4. 复制arch/arm/configs/下的s3c6400-defconfig文件,然后将其保存为.config,配置内核支持EABI,再选中XX6410 board这一项,保存退出;5. 执行make menuconfig对内核进行配置:执行make编译执行make zImage生成zImage将uboot根目录下的mkimage拷贝到/user/bin目录下执行make uImage生成uImage通过以上几步linux内核移植完了,剩下就移植驱动了。
linux 下跟踪led灯是否亮灭的代码

linux 下跟踪led灯是否亮灭的代码在Linux系统中,GPIO(General Purpose Input/Output)是一种通用的输入/输出接口,可以用于控制和读取外部设备的状态。
LED 灯作为一种常见的外部设备,可以通过GPIO接口进行控制。
下面将详细介绍如何使用GPIO接口来跟踪LED灯的亮灭状态。
我们需要确保系统中已经加载了GPIO相关的内核模块。
可以通过以下命令来检查:```lsmod | grep gpio```如果没有输出结果,说明系统中未加载GPIO相关的内核模块。
可以通过以下命令来加载gpio模块:```sudo modprobe gpio```接下来,我们需要确定系统中LED灯连接到的GPIO引脚号。
可以通过查看系统的设备树来获取GPIO引脚号。
设备树是一种描述硬件设备信息的数据结构,可以在/sys/firmware/devicetree/base目录下找到。
```ls /sys/firmware/devicetree/base```在该目录下,可以找到与GPIO相关的节点,通过查找相应的节点,可以获取到LED灯连接的GPIO引脚号。
例如,假设我们找到了一个名为gpio0的节点,表示LED灯连接到了GPIO0引脚。
接下来,我们可以使用sysfs文件系统来控制GPIO引脚的状态。
sysfs是Linux内核提供的一种虚拟文件系统,可以通过文件操作来控制硬件设备。
我们需要将GPIO引脚设置为输出模式。
可以通过以下命令来设置:```echo out > /sys/class/gpio/gpio0/direction```其中,gpio0为LED灯连接的GPIO引脚号。
然后,我们可以通过向GPIO引脚的值文件写入相应的值来控制LED 灯的亮灭状态。
例如,要使LED灯亮起,可以执行以下命令:```echo 1 > /sys/class/gpio/gpio0/value```要使LED灯熄灭,可以执行以下命令:```echo 0 > /sys/class/gpio/gpio0/value```通过读取GPIO引脚的值文件,我们也可以获取LED灯的亮灭状态。
openwrt 控制 led 编译
一、背景介绍在进行OpenWrt控制LED编译之前,首先需要了解什么是OpenWrt以及LED控制的意义。
OpenWrt是一个针对嵌入式设备的Linux发行版,它可以更好地实现路由器和其他嵌入式设备的控制和自定义。
而LED作为一种常见的指示灯,通过控制LED的亮灭来实现设备状态的显示,这在嵌入式设备中是非常重要的。
二、准备工作1. 硬件准备:一台主机、一块路由器或嵌入式设备2. 软件准备:安装好OpenWrt开发环境、熟悉Linux编译命令三、LED控制编译步骤1. 获取源代码我们需要从OpenWrt冠方仓库获取最新的源代码,这可以通过Git工具进行克隆操作。
在命令行中输入以下命令:```git clone xxx```2. 配置编译环境进入到OpenWrt源代码目录,执行以下命令进行配置:```cd openwrt./scripts/feeds update -a./scripts/feeds install -a```这个过程会下载OpenWrt所需的所有软件包源代码,并进行相应的配置。
3. 选择机型和包在配置完成后,使用以下命令选择要编译的设备类型和相关软件包:```make menuconfig```在弹出的界面中,选择Target System和Subtarget对应的硬件类型,然后选择要编译的软件包。
找到LED的相关配置,确保其被选中。
4. 进行编译配置完成后,执行以下命令开始编译OpenWrt固件:```make -j8```这个过程可能会持续一段时间,取决于你的计算机性能和网络状况。
在编译完成后,会在bin目录下生成编译好的固件。
5. LED控制将编译好的固件刷入路由器或嵌入式设备后,登入设备系统,找到LED相关的配置文件进行相应的修改和控制。
四、注意事项1. 在进行LED控制编译之前,要确保自己具备一定的Linux编译和命令行操作经验。
2. 在进行LED控制时,要详细了解你的设备硬件和OpenWrt固件的相关配置,避免操作失误导致设备损坏。
在U-boot中添加led步骤
在U-boot中添加led步骤基于HI3515开发包的uboot和编译器,开发板。
目的:在u-boot中增加驱动的步骤;例子:增加对led的控制函数1、在u-boot/drivers目录下新建led目录,并在led目录下新建led.c文件2、led.c内容如下#include<common.h>void led(void){printf("led control---- \n");}3、在u-boot/drivers/led目录下添加Makefile文件,内容如下include $(TOPDIR)/config.mkLIB := $(obj)libnand.aCOBJS-y += led.o #这里一定要用-y,不然不直接被编译COBJS := $(COBJS-y)SRCS := $(COBJS:.o=.c)OBJS := $(addprefix $(obj),$(COBJS))all: $(LIB)$(LIB): $(obj).depend $(OBJS)$(AR) $(ARFLAGS) $@ $(OBJS)############################################# ############################# defines $(obj).depend targetinclude $(SRCTREE)/rules.mksinclude $(obj).depend#########################################################################4、在u-boot/include目录下增加led.h文件,内容如下#ifndef _LED_H#define _LED_Hexturn void led(void);#endif5、修改u-boot目录下的Makefile文件在适当位置增加(可以紧跟着原来Makefile里面有相似命令的地方) LIBS += drivers/led/libled.aTAG_SUBDIRS += drivers/led6、修改u-boot/board/hi3515v100目下u-boot.lds文件在lib_arm/libarm.a (.text)的上一行添加drivers/led/libled.a (.text)增加链接文件,这样才能在board.c中调用函数7、完成以上步骤之后就可以在board.c中的void start_armboot (void)函数中调用led函数了加上led();之后,重新烧录u-boot,可以看到打印信息,led control----8、=========enjoy====designed by Dong xiufu=======2011-11-28==============。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
教师:年 月 日
【实验报告】
实验目的:
1.掌握uboot的配置、编译方法
2.掌握uboot的源码结构,分得清一、二阶段
3.掌握uboot的烧录命令、tftp烧写方法
4.了解u1,LED3点亮;LED2,LED5灭
扩展:
C.nand write 0x50000000 0x0 0x80000
注释:把内存地址0x50000000的内存烧写到flash地址空间0x0~0x80000
D.reset
重启,执行新的uboot
实验总结:
在本次实验中,初步学会了uboot的配置、编译方法,uboot的烧录命令、tftp烧写方法,
了解了uboot的镜像制作方法。
开发板:在Uboot下载模式调试模式下输入:loady
A.MINI6410#loady
注释:loady自动把程序下载到内存0x50000000地址上,也可以指定地址,比如:loady 0x50000000
B.MINI6410#nand erase 0x0 0x80000
注释:擦出”Boot loader”所在的Flash空间,
出现最多的错误就是连接开发板刷入uboot后串口连接显示成功按下开发板复位键无法正常连接开发板仅显示ok原因不明重新编译uboot后重新烧入开发板连接正常,应该是uboot程序问题。
实 验 报 告
【2017-2018学年第5学期】
【基本信息】
【开课部门】
【实验课程】
物联网网关技术
【设课形式】
独立非独立□
【实验项目】
uboot下LED点亮
【项目类型】
基础综合□ 设计□
研究创新□ 其它□
【项目学时】
【学生姓名】
【学 号】
【专 业】
【班 级】
【同组学生】
【实验室名】
【实验日期】
【教师对报告的最终评价及处理意见】
按住键盘的“空格键”,将出现如下菜单界面:
按下“q”键,进入切换到uboot命令操作模式,即可输入各种命令
5.U-Boot下LED灯的控制
①在./common文件夹下新建cmd_led.c,并在此文件中添加如下内容
②在./common/Makefile中添加:
COBJS += cmd_led.o
③配置头文件在u-boot-mini6410/include/cmd_confdefs.h头文件中把命令CFG_CMD_CONSOLE替换成我们的命令CFG_CMD_LEDTEST。
在u-boot-mini6410/include/configs/mini6410.h配置我们刚才增加的命令宏定义CFG_CMD_LEDTEST
④在Linux环境下,重新编译u-boot,得到u-boot.bin,并下载到自己的开发板中测试,输入help就会发现led命令
串口烧录方法:
PC电脑:通过Xshell工具,在Xshell界面文件->传输->选择ymode通过串口下载镜像到内存调试,
1.增加一个uboot命令,通过uboot命令模式控制led的亮灭
实验步骤:
1.U-Boot源码目录
1.把u-boot-mini6410-20111018.tar.gz压缩包拷贝到Ubuntu虚拟机的工作目录下,然后使用tar -xf u-boot-mini6410-20111018.tar.gz命令解压。
2.cd u-boot-mini6410/
目录显示如下:
3.配置编译Uboot:
#make mini6410_nand_config-ram256 ;生成配置文件
#make ;开始编译
生成u-boot.bin二进制文件用于烧录
4.通过minitool工具烧录u-boot.bin程序,开机后进入uboot命令模式,按下开发板电源开关,开发板就开始运行nor flash里面的uboot程序,串口的打印信息如下