FS_11C14开发板用户手册 V4.0
Si1140 开发板用户指南说明书
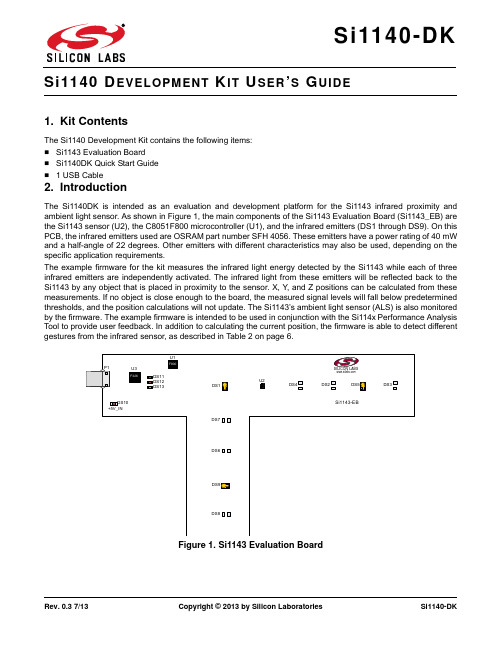
Rev. 0.3 7/13Copyright © 2013 by Silicon LaboratoriesSi1140-DKEVELOPMENT IT SER S UIDE1. Kit ContentsThe Si1140 Development Kit contains the following items:⏹Si1143 Evaluation Board ⏹Si1140DK Quick Start Guide ⏹ 1 USB Cable2. IntroductionThe Si1140DK is intended as an evaluation and development platform for the Si1143 infrared proximity and ambient light sensor. As shown in Figure 1, the main components of the Si1143 Evaluation Board (Si1143_EB) are the Si1143 sensor (U2), the C8051F800 microcontroller (U1), and the infrared emitters (DS1 through DS9). On this PCB, the infrared emitters used are OSRAM part number SFH 4056. These emitters have a power rating of 40mW and a half-angle of 22 degrees. Other emitters with different characteristics may also be used, depending on the specific application requirements.The example firmware for the kit measures the infrared light energy detected by the Si1143 while each of three infrared emitters are independently activated. The infrared light from these emitters will be reflected back to the Si1143 by any object that is placed in proximity to the sensor. X, Y , and Z positions can be calculated from these measurements. If no object is close enough to the board, the measured signal levels will fall below predetermined thresholds, and the position calculations will not update. The Si1143’s ambient light sensor (ALS) is also monitored by the firmware. The example firmware is intended to be used in conjunction with the Si114x Performance Analysis Tool to provide user feedback. In addition to calculating the current position, the firmware is able to detect different gestures from the infrared sensor, as described in Table 2 on page 6.Figure 1.Si1143 Evaluation BoardDS13DS10DS11DS12+5V_INSi1140-DK3. Software OverviewThere are several optional software packages available to support the Si1143 Evaluation Board. The Si114x Performance Analysis Tool can be used for initial evaluation to collect data from the board over the USB interface and display it graphically. For users ready to develop their own software, the Si114x Programmer’s Toolkit API enables rapid development of Si114x software in a PC environment using the Si1143 Evaluation Board. The Si114x Programmer’s Toolkit contains example source code that allows developers to get started quickly and then tailor the code to their needs. In addition, the Silicon Labs Integrated Development Environment (IDE) provides a means of developing code for the C8051F800 and uses the USB connection on the board to program the MCU and perform in-system debugging. All of the supporting software can be downloaded from the web at the URL /products/sensors/pages/optical-sensor-software.aspx.3.1. Using the Si1143 Evaluation Board with the Performance Analysis ToolThe Si1143 Evaluation Board is supported by the Si114x Performance Analysis Tool. The Performance Analysis Tool allows users to see real-time infrared proximity and ambient light measurements from the Si1143 in a graphical form. The communications interface to the Si1143 Evaluation Board is provided over the USB connection.To use the Performance Analysis Tool with the Si1143 Evaluation Board:1.Connect the Si1143 Evaluation Board to the PC using a USB unch the Performance Analysis Tool from the Start menu.3.Select the board from the “Devices” menu (it should show up as “TS” followed by a serial number).4.Select the channels you wish to display on the picture of the slider board that appears. The individual channels available are described in “3.1.1. Channel Selection” .5.Click the green “Acquisition” arrow to begin collecting data.Note:The Performance Analysis Tool, Si114x Programmer’s Toolkit, and the IDE cannot connect to the Si1143 EvaluationBoard at the same time. Be certain to disconnect from the board in one software package before trying to connect in the other.Figure 2 shows an example of the Performance Analysis Tool output when connected to the Si1143 Evaluation Board. To generate the graph, a hand was moved above the slider board. The selected traces shown are the raw data measurements for the amount of Infrared light being reflected onto the part. The pink trace represents the distance from infrared emitter DS1; the green trace represents the distance from infrared emitter DS9, and the yellow trace represents the distance from infrared emitter DS5.Figure 2.Performance Analysis Tool Main WindowSi1140-DK3.1.1. Channel SelectionSelecting which channels to display is done by checking the appropriate boxes on the Board Representation window, shown in Figure 3, and the Generic Data window, shown in Figure 4. There are two different groups of measurements available from the example firmware: raw data channels and generic data channels.3.1.1.1. Raw Data ChannelsThe raw data measurements can be seen by selecting the channels from the Board Representation window, shown in Figure 3. The two types of raw data measurements are ambient light and infrared proximity.1.Raw ambient light measurements. The ambient light channels are Channel 0 (red) and Channel 1(blue).Channel 0 displays measurements of the ambient visible light while Channel 1 displays measurements of the ambient infrared light.2.Raw infrared proximity measurements. The infrared proximity channels are Channel 2 (pink) readings using DS1, Channel 3 (green) readings using DS9, and Channel 4 (yellow) readings using DS5. The output isproportional to the amount of infrared light being reflected onto the part by an object above the board. These outputs are 16-bit unsigned values.Figure3.Raw Data Channel SelectionSi1140-DK3.1.1.2. Generic Data ChannelsThe generic data channels contain any data generated by the host MCU. These 16-bit channels can be anything from simple debug channels to calculated position values. See Table1 for an explanation of all the channels shown in Figure4.Figure4.Generic Data Channel SelectionSi1140-DKTable 1. Generic Data ChannelsName Label TypeDescriptionG0Rad1Linearized Distance Measurements Using characterization of the PS measurements with objects at certain distances, it is possible to estimate thedistance of an object based on the PS measurementvalue. These three channels represent the distance esti-mations for each LED's measurement.G1Rad2G2Rad3G3X(mm)Estimated Location CoordinatesWith the approximate distance measurements above, an X, Y , and Z estimation can be made. These estimations are given in units of mm.G4Y(mm)G5Z(mm)G6iLED1LED Drive Current LevelsEach LED driver has a specific LED drive current setting for it. These values are given in units of mA.G7iLED2G8iLED3G9VISAutoRanging Ambient OutputsAutoRanging will automatically change the modes of the photodiodes to avoid saturation. When changing modes, the raw data output changes levels, but AutoRanging will scale the raw data so that all measurements are on the same scale. The output from this channel is the pro-cessed value which can be used without knowledge of the photodiode modes.G10IRG11PS1AutoRanging PS OutputsThese channels are the AutoRanging PS output from the device. Raw data measurements are processed by the AutoRanging firmware to make all the readingsacross different modes have the same magnitude. Since the device switches modes to compensate for ambient light, the raw data will show jumps when changing modes. These outputs will not display the jumps because the firmware is stitching the raw outputs together.G12PS2G13PS3G14VIS s State of Ambient Visible System These channels help indicate what mode the sensor is in during each of their respective measurements. The four possible modes are as follows: Low Light, High Sensitiv-ity, High Signal, and Sunlight. These modes are num-bered from zero to three. For more information about each mode, please consult the data sheet.G15IR st State of Ambient IR System G16PS st State of PS SystemG17PS1bl PS Baseline LevelsAutoRanging uses baselining to determine the no-detect threshold for readings. Any readings below the values shown on these channels will be considered no-detect readings. Any values higher than this baseline will be shown in the AutoRanging PS Outputs above.G18PS2bl G19PS3bl G20N/A UnusedThe unused channels are not in use by software, but they are available in firmware to use as needed.G21N/ASi1140-DK3.1.2. Gesture SensingIn addition to infrared and ambient light measurements and distance calculations, the example firmware contains algorithms for gesture recognition. When connected to the board with the Performance Analysis Tool, a group window will appear, as shown in Figure 5. When a gesture is recognized by firmware, the gesture name and parameter information will be added to the top of the 3D Gesture group. Four gestures are supported by the example code. The parameters for each gesture are listed in Table 2.Figure 5.Performance Analysis Tool Group WindowTable 2. Recognized GesturesGesture Name Parameter Parameter Range Description of ActionSwipe Left Speed 118 (Slow to Fast)Move hand rapidly from the right side to the left side of the board.Swipe Right Speed 118 (Slow to Fast)Move hand rapidly from the left side to the right side of the board.Swipe Up Speed 118 (Slow to Fast)Move hand rapidly from the bottom to the top of the board.Swipe DownSpeed118 (Slow to Fast)Move hand rapidly from the top to the bottom of the board.Si1140-DK3.2. Si114x Programmer’s Toolkit3.2.1. Software APIThe Si114x Programmer’s Toolkit API enables rapid development of Si114x software in a PC environment using the Si1140DK. By emulating an I2C interface over USB, the Si114x Programmer’s Toolkit API allows source code to be developed on a PC and then migrated quickly and easily to an MCU environment once target hardware is available. Either commercially-available or free PC-based C compilers can be used for software development with the Si114x Programmer’s Toolkit API.The Si114x Programmer’s Toolkit API also includes the Si114x Waveform Viewer Application. This tool runs in conjunction with user applications to display and debug the measurements taken from the Si1140DK.Note:The Performance Analysis Tool, Si114x Programmer’s Toolkit and IDE cannot connect to the Si1143 Evaluation Board at the same time. Be certain to disconnect from the board in one software package before trying to connect in the other. 3.2.2. Command Line UtilitiesFor evaluation of the Si1140DK without the need to develop and compile source code, a flexible set of command line utilities is also provided with the Si114x Programmer’s Toolkit. These utilities can be used to configure and read samples from the Si1140DK. For automated configuration and scripting, the command line utilities can be embedded into .bat files.3.2.3. Sample Source CodeFor faster application development, the Si114x Programmer’s Toolkit contains example source code for the Si1140DK and for each of the command line utilities. Developers can get started quickly by using the Si114x example source code and then tailoring it to their needs.3.2.4. Downloading the Si114x Programmer’s ToolkitThe Si114x Programmer’s Toolkit and associated documentation is available from the web at the URL/products/sensors/pages/optical-sensor-software.aspx.Si1140-DK3.3. Silicon Laboratories IDEThe Silicon Laboratories IDE integrates a source-code editor, a source-level debugger, and an in-system Flash programmer. This tool can be used to develop and debug code for the C8051F800 MCU which is included on the Si1143 Evaluation Board. The use of several third-party compilers and assemblers is supported by the IDE.3.3.1. IDE System RequirementsThe Silicon Laboratories IDE requirements:⏹Pentium-class host PC running Microsoft Windows 2000 or newer.⏹One available USB port.3.3.2. Third Party ToolsetsThe Silicon Laboratories IDE has native support for many 8051 compilers. The full list of natively supported tools is as follows:⏹Keil⏹IAR⏹Raisonance⏹Tasking⏹SDCC3.3.3. Downloading the Example Firmware ImageSource code that has been developed and compiled for the C8051F800 MCU on the Si1143 Evaluation Board may be downloaded to the board using the Silicon Laboratories IDE. Follow the instructions below to update or refresh the .HEX image in the Si1143 Evaluation Board.1.Connect the Si1143 Evaluation Board to the PC using a USB cable.unch the Silicon Labs IDE, and click on Options->Connection Options.3.Select “USB Debug Adapter”, and then select the board from the list (it should show up as “TS” followed by aserial number).4.Select “C2” as the debug interface, and press “OK”.5.Connect to the board by pressing the “Connect” icon or by using the keyboard shortcut, Alt+C.6.Click on the “Download” icon, or use the keyboard shortcut Alt+D.7.In the download dialog window, click “Browse”.8.Change to Files of Type “Intel Hex (*.hex)” and then browse to select the file.9.Click “Open” then “Download”.10.To run the new image, either press “Run” or “Disconnect” in the IDE.Note:The Performance Analysis Tool, Si114x Programmer’s Toolkit and IDE cannot connect to the Si1143 Evaluation Board at the same time. Be certain to disconnect from the board in one software package before trying to connect in the other.Si1140-DK 4. SchematicSi1140-DKD OCUMENT C HANGE L IST Revision 0.2 to Revision 0.3Replaced QuickSense Studio references and instructions with Si114x Programmer’s Toolkit. Silicon Laboratories Inc.400 West Cesar ChavezAustin, TX 78701USASmart.Connected.Energy-Friendly .Products/products Quality /quality Support and Community DisclaimerSilicon Laboratories intends to provide customers with the latest, accurate, and in-depth documentation of all peripherals and modules available for system and software implementers using or intending to use the Silicon Laboratories products. Characterization data, available modules and peripherals, memory sizes and memory addresses refer to each specific device, and "Typical" parameters provided can and do vary in different applications. Application examples described herein are for illustrative purposes only. Silicon Laboratories reserves the right to make changes without further notice and limitation to product information, specifications, and descriptions herein, and does not give warranties as to the accuracy or completeness of the included information. Silicon Laboratories shall have no liability for the consequences of use of the information supplied herein. This document does not imply or express copyright licenses granted hereunder to design or fabricate any integrated circuits. The products are not designed or authorized to be used within any Life Support System without the specific written consent of Silicon Laboratories. A "Life Support System" is any product or system intended to support or sustain life and/or health, which, if it fails, can be reasonably expected to result in significant personal injury or death. Silicon Laboratories products are not designed or authorized for military applications. Silicon Laboratories products shall under no circumstances be used in weapons of mass destruction including (but not limited to) nuclear, biological or chemical weapons, or missiles capable of delivering such weapons.Trademark InformationSilicon Laboratories Inc.® , Silicon Laboratories®, Silicon Labs®, SiLabs® and the Silicon Labs logo®, Bluegiga®, Bluegiga Logo®, Clockbuilder®, CMEMS®, DSPLL®, EFM®, EFM32®, EFR, Ember®, Energy Micro, Energy Micro logo and combinations thereof, "the world’s most energy friendly microcontrollers", Ember®, EZLink®, EZRadio®, EZRadioPRO®, Gecko®, ISOmodem®, Precision32®, ProSLIC®, Simplicity Studio®, SiPHY®, Telegesis, the Telegesis Logo®, USBXpress® and others are trademarks or registered trademarks of Silicon Laborato-ries Inc. ARM, CORTEX, Cortex-M3 and THUMB are trademarks or registered trademarks of ARM Holdings. Keil is a registered trademark of ARM Limited. All other products or brand names mentioned herein are trademarks of their respective holders.。
英飞拓V2011矩阵中文说明书
请在安装前仔细阅读安装使用手册,并妥善保存以备将来查阅。
安全建议与警告
所有电子设备应避免受潮,远离火源或强磁场。 擦拭设备表面时,请使用干燥、柔软的抹布。 请保持设备周围良好的通风环境。 设备长时间不用时,请断开电源。 请使用厂家建议的原配件。 电源及电线应安装在远离地面和入口处的地方。 设备的维护需由专业人员进行。 建议妥善保管包装箱,方便设备的转移或搬运。
另外,系统提供有简洁完备的编程菜单可方便用户快速地进行整个系统参数的设置及编程。
注意
版权声明
本手册内容(包括文字与图片)的版权为 Infinova 公司所有。任何个人或法人实体,未经 Infinova 公司的书面授权许可, 不得以任Infinova 公司保留在事先不进行任何通知的情况下,对本手册的内容以及产品技术规格进行修改的权利,以便向用户提供 最新、最先进的产品。用户可从 Infinova 公司的网站 上获得最近的产品更新资料。
第二章 系统安装及连接 ............................................................ 4 2.1 安装................................................................................... 4 2.2 产品外观........................................................................... 4 2.2.1 前面板视图 ............................................................... 4 2.2.2 后面板视图 ............................................................... 4 2.3 硬件连接........................................................................... 4 2.3.1 视频输入连接 ........................................................... 4 2.3.2 控制码连接 ............................................................... 4 2.3.3 视频输出连接 ........................................................... 5 2.3.4 报警输入连接 ........................................................... 6 2.3.5 通讯口连接 ............................................................... 6 2.3.6 继电器输出连接 ....................................................... 7 2.3.7 以太网连接 ............................................................... 7 2.3.8 编程监视器连接 ....................................................... 8 2.3.9 电源连接 ................................................................... 8 2.3.10 网络视频连接 ......................................................... 8
AVP50G 开发板用户手册说明书

Logos FPGA开发平台用户手册AVP50G开发板2 / 51芯驿电子科技(上海)有限公司文档版本控制目录文档版本控制 (2)一、开发板简介 (6)二、FPGA核心板 (11)(一)简介 (11)(二)FPGA (12)(三)有源晶振 (13)(四)DDR3 (15)(五)QSPI Flash (17)(六)LED灯 (18)(七)扩展接口 (20)(八)电源 (24)(九)结构图 (27)三、扩展板 (28)(一)简介 (28)(二)VGA显示接口 (29)(三)HDMI输出接口 (30)(四)HDMI输入接口 (33)(五)视频输入接口 (35)(六)千兆以太网接口 (37)(七)ARM控制器 (39)1)实时时钟 (40)2)EEPROM (41)3)LED (42)4)USB串口 (43)5)SD卡 (44)(八)摄像头接口 (45)(九)扩展口 (46)(十)JTAG接口 (48)(十一)按键 (49)3 / 514 / 51芯驿电子科技(上海)有限公司(十二) 供电电源 (50)5 / 51专业级紫光同创 FPGA 视频图像处理开发平台(型号:AVP50G )正式发布了,为了让您对此开发平台可以快速了解,我们编写了此用户手册。
这款FPGA 视频图像处理开发平台具备HDMI 输入,DVI 输出,千兆以太网,CMOS Camera 接口和Micro SD 卡座等外设。
这极大的丰富了视频图像处理板的功能,不仅满足FPGA 视频图像处理的功能,还为视频图像存储,视频图像的网络通信提供了可能。
因此,这款开发平台可以堪称“专业级”和"全能级“。
这样的一款产品非常适合即将从事或者正在从事FPGA 视频图像处理或者视频图像通信及存储的学生、工程师等群体。
6 / 51芯驿电子科技(上海)有限公司一、 开发板简介在这里,对这款紫光同创 FPGA 开发平台进行简单的功能介绍。
开发板的整个结构,继承了我们一贯的核心板+扩展板的模式来设计的。
深圳颢天成 LPC11CxxDemo-V1 开发板说明书
LPC11CxxDemo-V1开发板用户手册V1.0深圳颢天成科技有限公司1 概述1.1简介LPC11CxxDemo-V1深圳市颢天成科技有限公司推出的一款基于NXP公司LPC11Cxx 系列处理器(Cortex-M0内核)的全功能评估板。
该板功能接口丰富,是一个应用开发好平台,也是学习者的首选。
配合JLINK、ULINK调试工具一起使用,更方便开发调试,所有的例程都是MDK下的完整工程,从而为自己的应用开发节省了时间,提高了效率。
1.2 硬件资源列表●LPC11Cxx(32位RISC性能处理器)32位ARM Cortex-M0结构优化●4个LED发光管,1个电源发光管●1个mini型USB插座,支持全速USB 2.0●1个RESET按键,1个ISP按键,1个WAKEUP按键,1个普通按键●1个UART支持RS-232●SSP接口●I2C接口●8通道10位ADC模块●1个JTAG/SWD调试接口●供电方式:USB供电1.3 软件资源列表例程名称 测试功能描述Blinky LED灯闪烁GPIO GPIO口边沿中断触发SSP SSP同步串行通讯SysTiick 通过系统滴答延时实现LED灯闪烁Timer32 通过32位定时器延时实现LED灯闪烁UART UART串口发送接收字符WDT 看门狗定时器应用实例I2C I2C主模式测试1.4 产品清单核对:LPC11CxxDemo-V1开发板1块128*64的LCD屏1块交叉串口线1条USB A-B线1根LPC11Cxx Demo-V1光盘一张1.5 使用入门1.5.1 电源LPC11CxxDemo-V1评估板采用USB供电方式,通过主板上的USB Device端口供电,供电正常时,评估板上的电源指示灯亮。
1.5.2 连接PC端推荐使用KEIL集成开发环境,通过JTAG连接仿真器到评估板,即可进行应用程序的调试和开发。
1.5.3 硬件原理:参加原理图1.5.4 镜像文件:编译好的可直接下载运行HEX文件1.6 出厂设置和硬件测试1)跳线J5 OFF不连接,不使用ISP下载2)串口1在一些例程中作为实验板与PC机的交互接口。
LPC1114教程原创
设置成数字 IO 就可以使用了。让然在使用别的复用功能时也一样首先需要设置
IO 配置寄存器将管脚设置在你需要的复用功能上。
下面就该了解一下通用 GPIO 的寄存器了,在通用的 GPIO 寄存器中分两部分,
一部分是数字功能,一部分是中断功能(这一节暂且不讨论),数字功能主要由
2 个寄存器构成,一个是方向寄存器 DIR 一个是数据寄存器 DATA,方向寄存器
九、LED 指示灯 在我们的开发板上有 3 个普通 LED 灯,是通过 IO 口直接控制的,采用的是灌电 流的方式驱动的。电路原理图如图所示:
பைடு நூலகம்
十、按键电路 开发板上有 3 个普通按键,通过这 3 个普通的按键可以做按键实验,熟悉按键的 读取方式。连接管脚如图所示:
十一、SD 卡接口 本开发板支持大容量的 SD 卡读写,这样我的再多的数据都可以通过 SD 卡保存 了,一些图片等信息也可以通过存储在SD卡中保存。SD卡通过 SPI 总线操作。 接口原理图如下:
口,这样你就可以在你的电脑上看见一个虚拟的移动存储器了,把里面的固件删 除,复制上你的新固件(程序),整个下载过程就完成了,怎么样简单吧!如果 还不明白那就看看 ZLG 或者 NXP 关于 USB 下载的文档哈! 六、一直都有的 24c02 24c02 是一种 IIC 协议的 EEPROM 存储芯片,芯片本身很便宜,在开发板上的低 位却不低,几乎所有的开发板都有它的踪迹,这是由于 2 个原因,一是通过一个 IIC 总线的器件可以学习 IIC 协议和内置 IIC 控制器的学习,二是在 MCU 运行的 过程中有很多数据是需要 EEPROM 保存的。基于这两个原因这个小芯片一直存 在于各个开发板就不奇怪了。下面是 24c02 部分的原理图。
开发板用户手册
开发板用户手册摘要:1.开发板简介2.开发板硬件配置3.软件开发环境搭建4.编程实例与实践5.常见问题与解决方案6.技术支持与资源正文:【开发板简介】开发板是一种集成了处理器、存储器、输入输出接口等多种功能于一体的计算机硬件平台,用于进行软硬件开发和测试。
本手册所介绍的开发板,具有强大的性能、丰富的外设接口以及易于使用的开发环境,是进行嵌入式系统开发、物联网应用、人工智能等领域开发的理想选择。
【开发板硬件配置】本开发板硬件配置如下:1.处理器:采用高性能的ARM 处理器,主频可达XXX MHz。
2.存储器:配备XXX MB 的DDR 内存和XXX MB 的Flash 存储,支持最大XXX MB 的MicroSD 卡扩展。
3.显示接口:支持XXX 分辨率的LCD 显示屏。
4.通信接口:具备以太网、蓝牙、Wi-Fi、LoRa 等多种通信方式。
5.输入输出接口:提供按键、LED 指示灯、串口、I2C、SPI、GPIO 等多种外设接口。
6.电源接口:支持DCXXXV 输入电压。
【软件开发环境搭建】为了方便开发者进行软件开发,我们提供了以下工具和资源:1.开发板固件:提供稳定可靠的Linux 操作系统和Android 操作系统固件。
2.编程工具:支持Keil、IAR 等主流的嵌入式开发环境。
3.调试工具:提供在线调试工具,支持断点调试、单步执行等功能。
4.开发库:提供丰富的开发库,包括网络通信、图形界面、文件系统等。
5.技术文档:提供详细的开发板用户手册、硬件参考手册、接口协议等文档。
【编程实例与实践】本手册提供了以下编程实例,供开发者学习和参考:1.LED 闪烁实验2.按键输入实验3.串口通信实验4.网络通信实验5.图形界面设计实验【常见问题与解决方案】在开发过程中,可能会遇到一些常见问题,如下所示:1.问题:无法启动开发板解决方案:检查电源线是否接触良好,检查开发板上的电源指示灯是否亮起。
2.问题:无法连接串口解决方案:检查串口线是否接触良好,尝试使用其他串口工具重新连接。
单片机说明书
•
San Jose, CA 95134-1709 • 408-943-2600 Revised September 27, 2005
CY7C68013A/CY7C68014A CY7C68015A/CY7C68016A
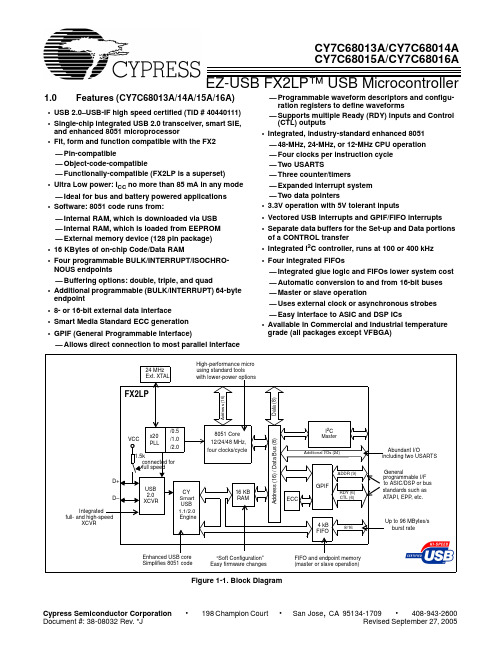
1.1 Features (CY7C68013A/14A only)
USB 2.0 SIE or external transceiver implementations. With EZ-USB FX2LP, the Cypress Smart SIE handles most of the USB 1.1 and 2.0 protocol in hardware, freeing the embedded microcontroller for application-specific functions and decreasing development time to ensure USB compatibility. The General Programmable Interface (GPIF) and Master/Slave Endpoint FIFO (8- or 16-bit data bus) provides an easy and glueless interface to popular interfaces such as ATA, UTOPIA, EPP, PCMCIA, and most DSP/processors. The FX2LP draws considerably less current than the FX2 (CY7C68013), has double the on-chip code/data RAM and is fit, form and function compatible with the 56-, 100-, and 128pin FX2. Five packages are defined for the family: 56VFBGA, 56 SSOP, 56 QFN, 100 TQFP, and 128 TQFP.
02_Speaker蜂鸣器

//使能
break;
case 0:
……..
break;
}
}
init_timer32PWM 函数:
void init_timer32PWM(uint8_t timer_num, uint32_t period, uint8_t match_enable) {
disable_timer32(timer_num); if (timer_num == 1) {
能、 使能匹配通道 3 设置 PWM 周期*/
/* Setup the match registers */ /* set the period value to a global variable */ timer32_1_period = period; LPC_TMR32B1->MR3 = timer32_1_period; LPC_TMR32B1->MR0 = timer32_1_period/2;
实验 02_Speaker 的使用
【实验目的】: 1、掌握 PWM 功能 2、利用 PWM 定时器实现蜂鸣器控制
【实验环境】: 1、FS_11C14 开发板 2、FS_Colink V2.0 3、RealView MDK(Keil uVision4)
【实验步骤】: 1、 在 Speaker 文件夹下找到并打开 project.uvproj 文件; 2、 编译此工程; 3、 通过 FS_Colink 下载编译好的工程到 FS_11C14 开发板; 4、 按 Reset 键复位开发板; 5、 学习 PL-2303HX 芯片 6、 查看 LPC11C14 芯片手册,对照程序分析 PWM 的实现过程; 7、 改变 PWM 占空比,听声音的变化。
/* Setup the external match register */
AM824-Core 开发套件说明书
1目录第1章AM824-Core开发套件 (3)1.1LPC824微控制器 (3)1.1.1特性 (3)1.1.2概述 (4)1.2LPC84x微控制器 (7)1.2.1特性 (7)1.2.2概述 (9)1.3开关矩阵(SWM) (12)1.3.1SWM简介 (12)1.3.2SWM应用 (13)1.4AM824-Core (14)1.4.1电源电路 (15)1.4.2最小系统 (16)1.4.3复位与调试电路 (16)1.4.4板载外设电路 (17)1.4.5跳线帽使用 (19)1.4.6MiniPort接口 (19)1.4.72×10扩展接口说明 (21)1.4.8MicroPort接口 (21)1.5MicroPort模块介绍 (22)1.5.1SPI Flash模块(MicroPort-Flash) (22)1.5.2EEPROM模块(MicroPort-EEPROM) (23)1.5.3RTC模块(MicroPort-RTC) (24)1.5.4USB模块(MicroPort-USB) (25)1.5.5RX8025T模块(MicroPort-RX8025T) (27)1.5.6DS1302模块(MicroPort-DS1302) (28)1.5.7Analog模块(MicroPort-Analog) (29)1.6MiniPort模块说明 (30)1.6.1LED模块(MiniPort-LED) (30)1.6.2数码管模块(MiniPort-View) (32)1.6.3按键模块(MiniPort-Key) (33)1.6.4595模块(MiniPort-595) (34)1.6.5ZLG72128模块(MiniPort-ZLG72128) (35)第2章ADC信号调理电路设计 (37)2.1应用背景 (37)2.1.1标称精度 (37)2.1.2外围电路 (37)2.1.3干扰源 (38)2.2电路设计 (38)2.2.1基准源 (39)2.2.2低噪声模拟电源 (41)2.2.3瞬态驱动 (42)12.2.4输入信号滤波 (43)2.2.5模拟地与数字地 (44)2.2.6I/O扇出电流 (45)2.3必要措施 (46)2.3.1输入范围匹配 (46)2.3.2多通道采样设置 (46)2.3.3电源分配策略 (49)2.3.4PCB布局布线处理 (49)2.4实测验证 (50)2.4.1无噪声分辨率 (50)2.4.2积分非线性(INL) (51)2.4.3失调与增益误差 (53)2.5应用说明 (54)第3章PWM实现DAC电路设计 (55)3.1实现原理 (55)3.1.1PWM信号时域分析 (55)3.1.2PWM信号频域分析 (55)3.2电路设计 (56)3.2.1DAC分辨率 (57)3.2.2有源低通滤波器 (58)3.3测试验证 (59)3.3.1DNL (59)3.3.2INL (60)3.3.3建立时间 (61)3.4参数总结 (61)第4章面向接口的编程 (63)4.1平台技术 (63)4.1.1创新的窘境 (63)4.1.2AWorks (63)4.1.3AMetal (65)4.2开关量信号 (72)4.2.1I/O输入输出 (72)4.2.2输出控制 (72)4.3LED数码管 (77)4.3.1静态显示 (77)4.3.2动态显示 (80)4.3.3闪烁处理 (83)4.4事件驱动 (88)4.4.1中断与事件驱动 (88)4.4.2软件定时器 (89)4.5键盘管理 (96)4.5.1独立按键 (96)4.5.2矩阵键盘 (101)4.6SPI总线 (108)24.6.1SPI总线简介 (108)4.6.274HC595接口 (111)4.7I2C总线 (115)4.7.1I2C总线简介 (115)4.7.2LM75B接口 (116)4.7.3温控器 (117)第5章深入浅出AMetal (123)5.1接口与实现 (123)5.1.1GPIO接口函数 (123)5.1.2LED接口与实现 (129)5.1.3I/O接口与中断 (133)5.2LED数码管接口 (136)5.2.1静态显示 (136)5.2.2动态显示 (141)5.2.3代码重构 (144)5.3键盘扫描接口 (152)5.3.1单个独立按键 (152)5.3.2多个独立按键 (156)5.3.3矩阵键盘 (160)5.4PWM接口 (165)5.4.1初始化 (166)5.4.2PWM接口函数 (166)5.4.3蜂鸣器接口函数 (167)5.5SPI总线 (170)5.5.1初始化 (170)5.5.2接口函数 (170)5.5.3SPI扩展接口 (178)5.6I2C总线 (186)5.6.1初始化 (186)5.6.2接口函数 (186)5.6.3I2C扩展接口 (189)5.7A/D转换器 (191)5.7.1模数信号转换 (191)5.7.2初始化 (194)5.7.3接口函数 (195)5.7.4温度采集 (197)5.8UART总线 (208)5.8.1初始化 (209)5.8.2接口函数 (210)5.8.3带缓冲区的UART接口 (216)第6章重用外设驱动代码 (220)6.1E2PROM存储器 (220)6.1.1器件简介 (220)6.1.2初始化 (221)36.1.3读写函数 (223)6.1.4NVRAM通用接口函数 (225)6.2SPI NOR Flash存储器 (229)6.2.1基本功能 (230)6.2.2初始化 (230)6.2.3接口函数 (232)6.2.4MTD通用接口函数 (235)6.2.5FTL通用接口函数 (239)6.2.6微型数据库 (245)6.3RTC实时时钟 (247)6.3.1PCF85063 (247)6.3.2RTC通用接口 (250)6.3.3闹钟通用接口 (253)6.3.4系统时间 (258)6.3.5特殊功能控制接口 (262)6.3.6RX8025T (263)6.3.7DS1302 (271)6.4读写卡模块 (279)6.4.1基本功能 (279)6.4.2初始化 (280)6.4.3设备控制类接口函数 (286)6.4.4操作接口函数 (288)6.4.5密钥和权限控制 (298)6.5键盘与数码管接口 (302)6.5.1ZLG72128简介 (302)6.5.2ZLG72128初始化 (310)6.5.3按键管理接口函数 (312)6.5.4数码管显示接口函数 (313)第7章面向通用接口的编程 (322)7.1LED控制接口 (322)7.1.1LED通用接口 (322)7.1.2LED驱动 (323)7.1.3MiniPort-LED (326)7.2HC595接口 (327)7.2.1HC595通用接口 (327)7.2.2HC595驱动 (328)7.2.3使用HC595驱动LED (331)7.3蜂鸣器控制接口 (333)7.3.1蜂鸣器通用接口 (333)7.3.2无源蜂鸣器驱动 (334)7.4温度采集接口 (335)7.4.1温度传感器通用接口 (335)7.4.2LM75B驱动 (336)7.5键盘 (338)47.5.1通用键盘接口 (338)7.5.2独立键盘驱动 (341)7.5.3矩阵键盘驱动 (343)7.6数码管 (348)7.6.1通用数码管接口 (348)7.6.2数码管驱动 (351)7.6.3数码管驱动(HC595输出段码) (356)7.7数码管与矩阵键盘联合使用 (359)7.7.1数码管、键盘与I/O驱动 (359)7.7.2数码管、键盘与HC595驱动 (362)7.8ZLG72128——数码管与键盘管理 (366)7.8.1ZLG72128简介 (366)7.8.2ZLG72128驱动 (366)7.9温控器 (371)第8章深入理解AMetal (375)8.1LED通用接口 (375)8.1.1定义接口 (375)8.1.2实现接口 (376)8.2HC595接口 (390)8.2.1定义接口 (390)8.2.2实现接口 (392)8.3蜂鸣器接口 (398)8.3.1定义接口 (398)8.3.2实现接口 (399)8.4温度采集接口 (405)8.4.1定义接口 (405)8.4.2实现接口 (406)8.5通用按键接口 (410)8.5.1定义接口 (410)8.5.2实现接口 (413)8.5.3检测按键的实现 (415)8.6通用数码管接口 (420)8.6.1定义接口 (420)8.6.2实现接口 (422)第9章BLE&zigbee无线模块 (439)9.1BLE核心板 (439)9.1.1产品简介 (439)9.1.2协议说明 (442)9.1.3蓝牙模块初始化 (443)9.1.4蓝牙模块控制接口 (446)9.1.5蓝牙模块读写数据接口 (453)9.1.6应用案例 (455)9.2zigbee核心板 (457)9.2.1产品简介 (457)59.2.2组网应用 (459)9.2.3zigbee初始化 (460)9.2.4zigbee配置接口 (463)9.2.5zigbee数据传输接口 (469)9.2.6应用案例 (471)9.3MVC框架 (474)9.3.1MVC模式 (474)9.3.2观察者模式 (475)9.3.3领域模型 (478)9.3.4子系统体系结构 (478)9.3.5软件体系结构 (479)9.3.6MVC应用程序优化 (497)第10章温度检测仪 (501)10.1业务建模 (501)10.1.1问题描述 (501)10.1.2系统用例图 (502)10.2分析建模 (502)10.2.1领域词典 (502)10.2.2类模型 (503)10.2.3交互模型 (504)10.2.4按键处理模型 (506)10.3温度检测设计 (507)10.3.1子系统接口 (507)10.3.2设计模型 (509)10.3.3模型初始化 (510)10.3.4设置与获取数据 (511)10.3.5报警状态 (514)10.4视图设计 (515)10.4.1数码管视图 (515)10.4.2蜂鸣器视图 (517)10.4.3zigbee视图 (518)10.5按键处理模块设计 (523)10.5.1SET键处理 (523)10.5.2INC(加)键处理 (529)10.5.3DEC(减)键处理 (529)10.5.4L/R键处理 (530)10.5.5初始化 (530)10.6状态机设计 (534)10.6.1状态模型 (534)10.6.2设计模型 (535)10.6.3状态机 (537)10.6.4状态机接口 (543)10.6.5动作类 (549)10.7应用程序 (559)6ARM嵌入式软件工程方法和实践:面向AMetal框架和接口的C编程前言1. 存在的问题最近十多年来,软件产业和互联网产业的迅猛发展,给人们提供了用武之地,同时也给软件工程教育提出了巨大的挑战。
FS_11C14开发板用户手册 V1.02
FS_11C14开发板用户手册V1.02北京华清远见研发中心2011年8月目 录第一章概述 (3)1.1 简介 (3)1.2 主要功能 (3)第二章硬件介绍 (5)2.1 硬件资源概览 (5)2.2 处理器: (5)2.3 传感器 (5)2.4 RFID设备模块 (6)2.5 ZigBee无线通信模块 (6)2.6仿真器 (6)2.7其它接口及外设 (6)第三章软件介绍 (7)3.1 开发环境 (7)3.2 实验及实验代码 (7)第四章 RealView MDK开发环境使用 (8)4.1 RealView MDK 开发环境简介 (8)4.2 创建工程 (8)4.2.1 创建工程文件 (8)4.2.2 选择设备 (9)4.3 编译和连接 (10)4.3.1 设置目标硬件的工具选项 (10)4.3.2 编译链接工程 (11)4.4 CoLink仿真器的程序安装 (12)4.4.1 CoLink固件升级 (12)4.4.2 CoLink USB驱动程序安装 (12)4.4.3 CoLink与RealView MDK连接的插件安装 (12)4.5 程序调试 (13)4.5.1 仿真器的配置 (13)4.5.2 程序下载的配置 (14)4.5.3 程序调试运行 (16)第一章 概述1.1 简介华清远见专为物联网教学研发的FS_11C14开发板,基于LPC11C14微控制器 (ARM Cortex-M0内核)。
集成多种传感器、RFID、ZigBee、OLED显示模块等。
丰富的硬件资源及物联网相关实验程序,适合于物联网教学及工程师做研发参考平台。
还配套有开放的CoLink仿真器,使用者可以在不另外配置U-LINK2仿真器的情况下进入开发。
为使用者提供了一个简洁方便可以快速上手的良好开发环境,可以为应用开发节省时间,提高效率。
1.2 主要功能- 处理器 LPC11C14- 主频最高50MHz,外接12MHz晶体,实际工作48MHz- 32KB FLASH- 8KB SRAM- 1个I2C接口256B EEPROM- 1个SPI接口256KB FLASH- 1个MCU片上UART接口,通过板上USB转换后可与PC或其它装置连接- 2个扩展UART接口- 1个I2C接口- 2个SPI接口- 1个CAN总线接口- 1个RS-485/RS-422可选双功能接口- 2路ADC输入- 1个128x64点阵OLED双色(黄和蓝)显示屏- 1个八段LED数码管- 2个LED灯- 1个蜂鸣器- 1个温湿度传感器- 1个三轴加速度传感器- 1个光敏传感器- 1个可调电阻- 1个可控电风扇- 1个RFID模块- 1个ZigBee模块- 1个电源开关- 1个复位键(Reset)- 1个可控制四个方向和确定功能的五向摇杆键- 1个功能键(Esc)- 1个时钟输出- 1个20Pin JTAG调试接口 - 1个1000mAh锂电池- 2根USB线- 1个RFID存储卡- 1个CoLink仿真器第二章 硬件介绍2.1 硬件资源概览图2.1 硬件实体2.2 处理器:基于ARM Cortex-M0内核的LPC11C14,低功耗、低成本、丰富的外设资源。
FS2410使用手册v2006
第三章 FS2410 开发板使用........................................14
3.1.启动 Linux ........................................................................................................................14 3.2.启动 WINCE.....................................................................................................................15 3.3.FS2410 的 BIOS 功能说明 ..............................................................................................16 3.4.非操作系统下的外围资源测试 ....................................................................................... 17
第二章 FS2410 开发板主要硬件描述........................10
基于LPC11C14的服装工位机设计
2 I FI 技 术 分 析 u I)
离 散 制 造 的产 品 往 往 由多 个 零 件 经 过 一 系 列 并 不 连 续 的 工 序 的 加 工 最 终 装 配 而 成 , 装 制 造 正 属 于 此 类 , 产 过 服 生 程 中产 品 品 种 繁 多 、 艺 复 杂 , 含 庞 大 的 生 产 物 流 信 息 量 。 工 包 因 此 ,应 用 于 服 装 制 造 的射 频识 别 系 统 需 要 包 含 3部 分 : ) 1 应答器 , 即物 料 的 R I 标 签 , FD 由耦 合 元 件 和 芯 片 组 成 , 置 内
性 能 指 标 如 下 : ) 作 频 率 : 高 5 z 工 作 温 度 范 围 : 1工 最 0 MH ;
器 , 用 线 射 频 信 号 通 过 空 间耦 合 ( 变 磁 场 或 电磁 场 ) 现 利 交 实 与 应 答 器 的信 息 传递 。在 耦 合 通 道 内 . 据 时 序 关 系 , 实 现 根 将 能 量 传 递 和 数 据 交 换 。标 签 信 息 被 读 取 完 成 之 后 , 会 传 输 将 到 后 端 应 用 软 件 。3 应 用 软 件 。 ) 对读 写 器 获 取 的 应 答 器 信 息
lg sisb e d n I lb l h n u l a ed t C t r u h C o it y r a i gRF D e ,t e p o d t aa t P h o g AN u . eh r w r n ot r y t m sd sg e c a h o b s T ad a e a d s f h wa es s e wa e in d
M0程序烧写
程序和镜像的烧写
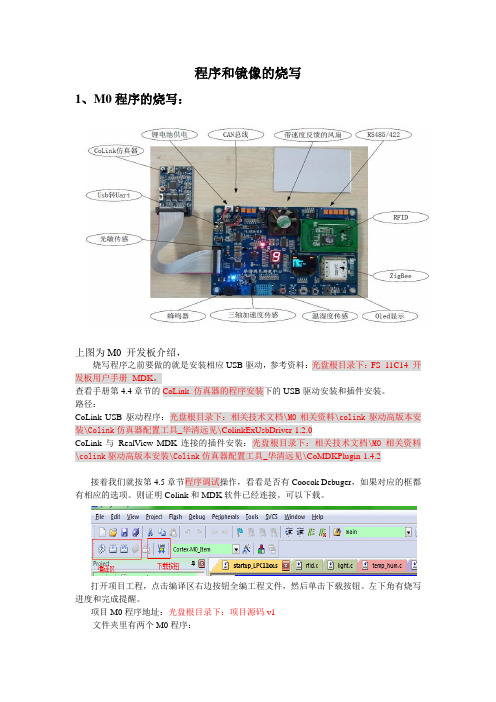
1、M0程序的烧写:
上图为M0 开发板介绍,
烧写程序之前要做的就是安装相应USB驱动,参考资料:光盘根目录下:FS_11C14 开发板用户手册- MDK。
查看手册第4.4章节的CoLink 仿真器的程序安装下的USB驱动安装和插件安装。
路径:
CoLink USB 驱动程序:光盘根目录下:相关技术文档\M0相关资料\colink驱动高版本安装\Colink仿真器配置工具_华清远见\ColinkExUsbDriver-1.2.0
CoLink 与RealView MDK 连接的插件安装:光盘根目录下:相关技术文档\M0相关资料\colink驱动高版本安装\Colink仿真器配置工具_华清远见\CoMDKPlugin-1.4.2
接着我们就按第4.5章节程序调试操作,看看是否有Coocok Debuger,如果对应的框都有相应的选项。
则证明Colink和MDK软件已经连接。
可以下载。
打开项目工程,点击编译区右边按钮全编工程文件,然后单击下载按钮。
左下角有烧写进度和完成提醒。
项目M0程序地址:光盘根目录下:项目源码v1
文件夹里有两个M0程序:
M0_程序源码(v3.0)对应的是M0板子为v3.0的开发板M0_程序源码(v4.0)对应的是M0板子为v4.0的开发板。
FS_11C14开发板用户手册 V4.0
I
FS_11C14 开发板用户手册
第一章 开发板概述
1.1 简介
华清远见专为物联网教学研发的 FS_11C14 开发板,基于 LPC11C14 微控制器 (ARM Cortex-M0 内核),集成多种传感器、RFID、ZigBee、OLED 显示屏等模块。 丰富的硬件资源及物联网相关系列实验程序, 适合应用于物联网教学平台及工程 师研发参考平台。 此FS_11C14开发板配套有开放的CoLink仿真器,使用者可不需要另外配置 U-LINK2等仿真器就可进行开发,从而为使用者提供了一个简洁方便、可以快速 上手的良好开发环境,为应用开发节省了时间,提高了效率。
FS_11C14 开发板用户手册
FS_11C14 开发板用户手册 V4.0 物 联 网 开 发 平 台
北京华清远见研发中心
2012 年 6 月
FS_11C14 开发板用户手册
目 录
第一章 开发板概述...................................................................................................... 1 1.1 简介................................................................................................................. 1 1.2 主要配置......................................................................................................... 2 第二章 硬件资源.......................................................................................................... 3 2.1 硬件资源概览................................................................................................. 3 2.2 处理器............................................................................................................. 3 2.3 板载主要传感器............................................................................................. 4 2.4 RFID 设备模块................................................................................................ 4 2.5 ZigBee 无线通信模块.................................................................................... 5 2.6 仿真器.............................................................................................................. 5 第三章 板载实验代码.................................................................................................. 6 3.1 配套案例、实验说明...................................................................................... 6 3.2 配套案例.......................................................................................................... 6 3.3 配套实验.......................................................................................................... 6 第四章 RealView MDK 开发环境使用......................................................................... 8 4.1 RealView MDK 开发环境简介....................................................................... 8 4.2 创建工程......................................................................................................... 8 4.2.1 创建工程文件...................................................................................... 8 4.2.2 选择设备.............................................................................................. 9 4.3 编译和连接................................................................................................... 10 4.3.1 设置目标硬件的工具选项................................................................ 10 4.3.2 编译链接工程.................................................................................... 11 第五章 CoLink 仿真器安装及调试........................................................................... 12 5.1 CoLink 环境安装安装.................................................................................. 12 第一步 CoLink 固件升级............................................................................. 12 第二步 CoLink USB 驱动程序安装............................................................. 12 第三步 CoLink 与 RealView MDK 连接的插件安装................................... 13 备注................................................................................................................ 13 5.2 Colink 程序调试.......................................................................................... 13 5.2.1 仿真器的配置.................................................................................... 14 5.2.2 程序下载的配置................................................................................ 14 5.2.3 程序调试运行.................................................................................... 16
T-Engine PPC-V4FX开发板用户指南说明书
E-mail:**************************.jpAn Open Development Platform for Embedded SystemsT-Engine/PPC-V 4FX Development KitThe CPU Board of the T-Engine/PPC-V4FX Development kit (in full-scale)Koizumi Bldg. 1-29-1 Nishi-Gotanda, Shinagawa-ku, Tokyo 141-0031 Japan E-mail:**************************.jp http://www.personal-media.co.jp/Tel: +81-3-5759-8305Fax: +81-3-5759-8306PM156-P37-01E.0803Personal Media Corporation- For details and price, please contact us.- TRON is an abbreviation of "The Real-time Operating System Nucleus". - eTRON is an abbreviation of "entity and economy TRON".- TRON, eTRON, T-Engine, μT-Engine, T-Monitor, and T-Kernel are specified terms for computers, and are not product names.- All product names are trademarks or registered trademarks of their respective owners.- Due to continued product upgrade or enhancement, the information in this document is subject to change without notice.- T-Engine is an open, royalty-free specification, and not a commercial product.- Hardware- A standard T-Engine specification CPU board with Xilinx Virtex-4 FX60 PowerPC405- Connector Board(LAN RJ-45 x 2port, 15-pin VGA, JTAG-ICE I/F, JTAG-FPGA I/F)The display and serial cable for PC can be connected to this board - AC adapter- RS232C (serial) cable - CD-ROMT-Kernel and other software and various documentation - OthersPacking list, Software License Agreement, etc.The following documentation are being supplied in electronic files:- Development Kit User's Manual - Library Manual - Device Driver Manual - T-Kernel Extension Manual- GNU Development Environment Manual - GNU Development Environment Manual (for Windows)- T-Monitor Specification - T-Kernel Specification- T-Monitor/T-Kernel Implementation Specification - Hardware User's Manual (circuit diagrams provided)For T-Engine target board - PMC T-Monitor - PMC T-KernelT-Kernel/OS, T-Kernel/SM, T-Kernel/DS - PMC T-Kernel ExtensionFile management functions, CLI (Command Line Interpreter), PC card manager (bus driver), USB manager (bus driver)- Device drivers: source code includedClock (RTC), console (serial), system disk (ATA card, USB), KB/PD (Keyboard, Touch panel, Mouse), Screen (CRT, Optional LCD)- Sample applications: Source code included Simple Hard Disk Partitioner (hdpart), Disk Format (format), Compare Files (cmp), Disk Dump (dd), Simple Editor (ed)Note:- Customers are allowed to execute the above software on T-Engine/PPC-V4FX Development Kit only. If the above software are executed on another hardware (or embedded in a final product), a separate license is required. Please contact us for further information.- Among software shown above, the copyright to T-Kernel, the standard real-time OS for T-Engine, is held by the T-Engine Forum (/).The T-Kernel program, including source code, has been made open to the public by the T-Engine Forum. Anyone who agrees to the conditions set forth in the T-License is free to use it, including incorporation in end products. Note, however, that the T-Kernel offered by the T-Engine Forum lacks MMU support. The addition of MMU support is necessary in order to run the PMC T-Kernel Extension, for realizing file management and virtual memory, or in order to run other middleware such as the PMC T-Shell with its GUI functionality. Personal Media offers the PMC T-Kernel with these and other enhancements. For development machine- GNU development environment with source code GNU based development environment running on PC-based Linux and Windows (Cygwin), including GDB source debugger.- GUI integrated development environment: Eclipse for PMC T-Kernel(Free download for the registered user)PRODUCT SPECIFICATIONSupplied Software- PC/AT compatible Linux• Confirmed package: RedHat Linux 7.1 / 7.3 / 8.0 / 9.0, Red Hat Professional Workstation.- Windows (Cygwin)• Confirmed package: Cygwin on Windows XP ProfessionalSystem Requirements for GNU Development Environment- T-Kernel Kumikomi Programing Kyokasho(A Practical Guide to T-Kernel Embedded Programing), Ken Sakamura (Ed.), 4200yen.- T-Kernel Standard Handbook, Ken Sakamura (Ed.), 3800yen.* English documents are included as PDF files on CD-ROM.- T-Engine, T-Engine2, T-Engine3 (TRONWARE extra edition), 1600yen (each).- TRONWARE Vol.1-109 (TRON bimonthly magazine, scheduled to be continued),1200yen (ordinary issue).- μITRON 4.0 Standard Guidebook, Ken Sakamura (Ed.), 3200yen.* The above books are published by Personal Media Corporation in Japanese. Tax is not included.- T-Engine Forum /- TRON Project/- Personal Media Corporation (T-Engine Solution Website)/en/index.htmlReference Books and Related InformationLCD Board for T-Engine/PPC-V4FXAn LCD board which connects to the CPU board of the T-Engine/PPC-V4FX Development Kit.T-Engine Devel opment Bench (acryl ic board + portable cover)Dedicated Connectors for Extension Bus of T-Engine/μT-EngineLAN Extension BoardDrivers and TCP/IP software are not included, use "PMC T-Shell/PPC-V4FX Development Kit"PMC T-Shell/PPC-V4FX Development KitAn assortment of GUI middleware, TCP/IP, Script Language "MicroScript", and others.OptionalsDocumentationMain Package Details。
光敏传感器系统设计
2
2.1
1、学习光线传感器ISL29003的原理
2、掌握光线传感器ISL29003的使用方法
3、复习I2C总线的使用
2.2
1、FS_11C14开发板
2、FS_Colink V2.0
3、RealView MDK(Keil uVision4)
2.3
1、在light文件夹下找到并打开project.uvproj文件;
(1)自己设计至少三种以上不同光照条件,测定不同光照条件下光敏传感器的输出,以及在显示屏上的显示数值;
(2)电路原理图的设计;
(3)制作PCB版图
(4)编写实验报告
1.2
1.2
(1)传感器选择:选用ISL2900集成光传感器作为采集光照信号的传感器。
(2)光照测试:在室外太阳光强照射下、室内适宜光照下、室内昏暗条件下三种光照条件下分别测试。
2、编译此工程;
3、通过FS_Colink下载编译好的工程到FS_11C14开发板;
4、按Reset键复位开发板,观察OLED显示;
5、分别把开发板放在光照程度不同的地方,观察OLED显示;
6、查看ISL29003芯片手册,学习其原理及使用方法;
7、对照原理图分析实验代码
2.4
对光敏传感器进行了四次实验,分别不给光、弱光、正常光、强光。最后在液晶屏上显示在不同光强下的不同数值,光越强数值越大。四次实验数值以此为:6、51、250、2139。
I2CRead(LIGHT_I2C_ADDR, buf, 1);
data = buf[0];
buf[0] = ADDR_MSB_SENSOR;
I2CWrite(LIGHT_I2C_ADDR, buf, 1);
32位单片机LPC11C14学习
32位单片机LPC11C14学习功能:(设置GPIO口方向),参数(端口号,位,输入或输出(0入1出))GPIOSetDir( PORT0, 1, 0 );GPIOSetValue()一个是设置端口方向,一个是设置输出的值,直接调用就可以了。
如果在片内RAM当中运行代码并且应用程序需要调用中断,那么必须将中断向量重新映射到Flash地址0x0。
这样做是因为所有的异常向量都位于地址0x0及以上。
通过将寄存器MEMMAP(位于系统控制模块当中)配置为用户RAM模式来实现这一点。
#ifdef __DEBUG_RAMLPC_SYSCON->;SYSMEMREMAP = 0x1;#else#ifdef __DEBUG_FLASHLPC_SYSCON->;SYSMEMREMAP = 0x2;#endif#endifARM 微控制器有一个显著的特点,就是都可以把时钟频率倍频到很高,具体到多高,每个系列的微控制器都有一个指标,我们现在要学的Cortex-M0内核处理器LPC1114最高能到50MHz,当然,其它的ARM内核微处理器可以倍频到更高,现在好多手机都采用了ARM内核处理器,比如卖的很火的诺基亚 5233就是采用了ARM11处理器,ARM11的处理器的主频为433MHz,比Cortex-M0的50MHz高多了吧!所以Cortex-M0处理器被ARM称为入门级的内核!要实现对系统时钟的配置,时钟配置图是必须要看懂的!因为它比文字更具有参考价值,看上这张图配置时钟,绝对不会出现漏洞!(我建议你把这张图打印出来贴到你的墙上,我就是这么做的,你看着办吧!)接下来,我将一步一步引领你彻底看懂这张“时钟配置图”。
注意了,要开始讲图了!(这张图就是数据手册说的时钟产生单元:CGU(Clock generationunit))LPC1114 内部含有3个时钟振荡器:系统振荡器,IRC振荡器,看门狗振荡器。
03_ADC芯片资料
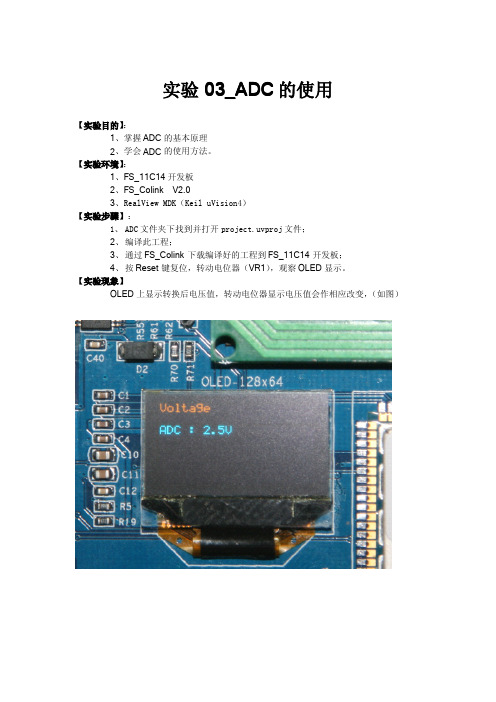
ADC的使用03_ADC实验03_【实验目的】:1、掌握ADC的基本原理2、学会ADC的使用方法。
【实验环境】:1、FS_11C14开发板2、FS_Colink V2.03、RealView MDK(Keil uVision4)【实验步骤】:1、ADC文件夹下找到并打开project.uvproj文件;2、编译此工程;3、通过FS_Colink下载编译好的工程到FS_11C14开发板;4、按Reset键复位,转动电位器(VR1),观察OLED显示。
【实验现象】OLED上显示转换后电压值,转动电位器显示电压值会作相应改变,(如图)【实验分析】硬件分析:由原理图可知电位器VR1接在LPC11C14的PIO0_11口,并且需要选择该口为AD0功能软件分析:ADC测试函数:/******************************************************************************Function Name:ADC_Test*Description:ADC test.*Input:None*Output:None*Return:None******************************************************************************/void ADC_Test(void){char buf[25];uint32_t adv;float vol;OLED_ClearScreen();//清屏OLEDOLED_DisStrLine(0,0,"Voltage");//在OLED上显示“Voltage”printf("\r\n");ADCInit(ADC_CLK);//ADC初始化while(1)//死循环{adv=ADCRead(0);//读取ADC转化数据函数//将读取的数据进行以下处理(LPC11C14的ADC输入电压范围是0-3.3V,并且是//十位的精度)vol=adv*3.3/1023;adv=vol*10;snprintf(buf,21,"ADC:%d.%dV",adv/10,adv%10);//将处理后的数据存入buf OLED_DisStrLine(2,0,(uint8_t*)buf);//将buf中的内容显示在OLED上printf("%d.%dV",adv/10,adv%10);delay_ms(250);}}。
ARMCortex-M0LPC1114开发板入门手册_图文.
Ration ARM Cortex-M0 LPC1114开发板 V3.0使用指南亲!感谢您使用 ARM Cortex-M0 LPC1114开发板!谷歌公司在 2013年一举收购 8家机器人公司,2014年初又用 32亿美元现金收购一家创办 2年 , 且只有 2款产品的智能家居公司,这家公司名字叫做 nest。
这意味着智能家居、物联网、可穿戴电子设备已经进入实质性阶段了。
首先,我要告诉您,您的选择是明智的,Cortex 内核开发板是这些电子产品的主流控制器,因为 Cortex 内核单片机是 ARM 公司的目前主打的产品,你以前所听到的ARM9\ARM11都已经是浮云了。
Cortex 内核单片机从低端到高端, 遍布于各个领域,它是最大特点就是功耗低、性价比高。
未来的电子产品,一定是智能的。
(你知道“点名时间”网吗?不知道的话赶快去看看吧:/赶快去看看别人怎么赚钱未来的电子产品,一定是低功耗的。
(地球资源保护商人做产品,一定是选择成本最低且可以满足需求的材料。
(性价比您现在拿到手的开发板,内核是 Cortex-M0,属于 Cortex 系列低端的单片机。
(千万不要把“低端”与你的“收入”画等号。
低端与高端,指的是它的性能,性能决定了它的应用领域,如果你在你的领域做精做强,那么想象一下结果……一、开发板检测:1. 把附带的 USB 数据线拿出来,一端插到电脑,一端插到开发板。
2. 按下电源(POWER开关, 开发板上会运行 GUI 演示例程, 这个例程是《应用篇例程》例程 5.3。
开发板在发货以前,我会用例程程序检测所有的硬件运行良好,所以,你拿到手的开发板,一般是不会有问题的。
有任何疑问,请随时联系我:QQ:253057617电话:152********(山西省太原市QQ 群:160610211博客:http://www.rationmcu .com二、学习前的准备工作1. 需要安装 USB 转串口驱动(用于 ISP 下载程序打开这个文件夹双击这个安装程序, 根据提示安装完, 一般都是点击下一步。
SF14 软件用户安装手册
文档编号:
XXX-SF-14
保密级别:
版本编号:
V1.0
软件开发文档
文档名称:用户安装手册
项目名称:XXXXXXXXXX
项目负责人:XX XX
编写:
年___月___日
1.1
介绍本书提供的几个部分:简单介绍大概内容。
1.2
提示:安装过程的一些好的方法。
注意:安装过程中特殊注意的地方。
警告:指出危险动作或状态,否则,会对您的安装造成破坏。
2
2.1
(1)硬件环境:列出运行本系统所要求的硬设备的最小配置。微机要求包括型号、内存、硬盘,显示器要求,以及一些其他的I/O设备。
(2)软件环境:列出运行本系统所需要的支持软件。如操作系统,程序语言以及数据库管理系统。
2.2
(1)简单介绍单机版打包光盘的定义和内容。
(2)介绍该系统单机版的安装步骤。
2.3
介绍系统安装之后,查看该系统配置信息的情况,以确定是否需要改动,是否是最优配置。
另外,运行系统的时候,有时会出现数据库联接不成功。在这部分应介绍会有哪几种可能的原因,并分别简述。
校对:
年___月___日
审核:
年___月___日
批准:
年___月___日
XXXX电子有限公司
2011年
修订历史记录
版本
日期
AMD
修订者
说明
1.0
201-修改,D-删除)
1
指明编制该手册的目的和预期的读者,简介该系统的运行环境:操作系统OS,数据库系统DBMS,C/S二层结构或B/A/S三层结构,界面特点,以及技术特色。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
产品标准配置
1 2 3 4 5 FS_11C14开发板1块 Colink 仿真器1个 RFID 卡一个 USB 线2根 DVD 光盘1张
产品选配模块
1 2 1 ZigBee 模块 实验箱包装
FS_11C14 开发板用户手册
选配 ZigBee 模块 FS_ZICM2410简介
ZigBee 采用的是 CEL 公司 ZICM2410模块。 FS_ZICM2410带有 usb 转串口芯片, 可以方便的连接 PC 机或其它带有 USB 主机接口的设备,从而实现和 FS_11C14组 网通讯。 FS_ZICM2410模块还可以利用 ZICM2410的扩展资源实现对电位器、按键中 断、LED 灯等外设的编程控制。
第二章 硬件资源
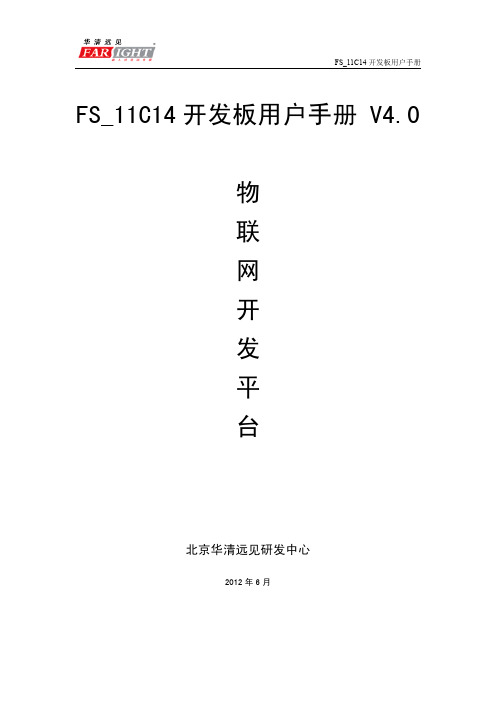
2.1 硬件资源概览
锂电池供电 CoLink 仿 真 器 CAN总 线 带速度反馈的风扇 R S 4 8 5 /4 2 2
U s b 转U a r t RFID 光敏传感
ZigBee
蜂鸣器
三轴加速度传感
温湿度传感
Oled显 示
图 2.1 开发板实体
2.2 处理器
基于 ARM Cortex-M0 内核的 LPC11C14,低功耗、低成本、丰富的外设资 源。 此处理器主要有如下特点: - 带有 SWD 调试功能(4 个断点)的 50MHz Cortex-M0 控制器 - 32 个可嵌套向量中断、4 个优先级、最多 13 个拥有专用中断的 GPIO - 带片上 CANopen 驱动器的 CAN 2.0B 的 CAN 控制器 - UART、2 个 SPI、 I2C - 具备脉宽调制/匹配/捕捉功能的 2 个 16 位和 2 个 32 位计时器,1 个 24 位 系统计时器 - 具备±1LSB DNL 的 8 通道高精度 10 位 ADC - 42 根 5V 兼容 GPIO 引脚,选择引脚高电平驱动(20mA) - 32kB 片上内部 Flash、8kB 片上内部 RAM
FS_11C14 开发板用户手册
FS_11C14 开发板用户手册 V4.0 物 联 网 开 发 平 台
北京华清远见研发中心
2012 年 6 月
FS_11C14 开发板用户手册
目 录
第一章 开发板概述...................................................................................................... 1 1.1 简介................................................................................................................. 1 1.2 主要配置......................................................................................................... 2 第二章 硬件资源.......................................................................................................... 3 2.1 硬件资源概览................................................................................................. 3 2.2 处理器............................................................................................................. 3 2.3 板载主要传感器............................................................................................. 4 2.4 RFID 设备模块................................................................................................ 4 2.5 ZigBee 无线通信模块.................................................................................... 5 2.6 仿真器.............................................................................................................. 5 第三章 板载实验代码.................................................................................................. 6 3.1 配套案例、实验说明...................................................................................... 6 3.2 配套案例.......................................................................................................... 6 3.3 配套实验.......................................................................................................... 6 第四章 RealView MDK 开发环境使用......................................................................... 8 4.1 RealView MDK 开发环境简介....................................................................... 8 4.2 创建工程......................................................................................................... 8 4.2.1 创建工程文件...................................................................................... 8 4.2.2 选择设备.............................................................................................. 9 4.3 编译和连接................................................................................................... 10 4.3.1 设置目标硬件的工具选项................................................................ 10 4.3.2 编译链接工程.................................................................................... 11 第五章 CoLink 仿真器安装及调试........................................................................... 12 5.1 CoLink 环境安装安装.................................................................................. 12 第一步 CoLink 固件升级............................................................................. 12 第二步 CoLink USB 驱动程序安装............................................................. 12 第三步 CoLink 与 RealView MDK 连接的插件安装................................... 13 备注................................................................................................................ 13 5.2 Colink 程序调试.......................................................................................... 13 5.2.1 仿真器的配置.................................................................................... 14 5.2.2 程序下载的配置................................................................................ 14 5.2.3 程序调试运行.................................................................................... 16