小型爬壁机器人系统设计与应用
基于STM32的负压爬壁机器人控制系统设计

基于STM32的负压爬壁机器人控制系统设计负压爬壁机器人是一种能够在垂直墙壁上行走的机器人,它通过产生负压吸附在墙面上,从而实现在墙面上的运动。
该机器人常用于工业领域的检测、维护和清洁等任务。
本文将基于STM32单片机设计一个负压爬壁机器人控制系统,并详细介绍其系统架构、硬件设计和软件设计。
一、系统架构设计负压爬壁机器人控制系统的架构主要包括传感器模块、控制模块和执行器模块。
传感器模块用于获取机器人周围的环境信息,控制模块用于处理传感器数据并对机器人进行控制,执行器模块用于实现控制指令的执行。
二、硬件设计1.MCU选择:采用STM32系列单片机作为控制模块的主控芯片,主要考虑到其性能强大、成本低廉、易于开发和丰富的外设资源。
2.传感器选择:负压爬壁机器人的传感器主要包括倾角传感器、陀螺仪、距离传感器等。
倾角传感器用于检测机器人的姿态信息,陀螺仪用于检测机器人的角速度,距离传感器用于检测机器人距离墙面的距离。
3.执行器选择:负压爬壁机器人的执行器主要包括吸盘和电机。
吸盘用于产生负压吸附在墙面上,电机用于驱动机器人进行运动。
4.通信模块选择:负压爬壁机器人的通信模块主要用于与外部设备进行数据交互,例如与上位机进行通信。
可以选择UART、SPI、CAN等通信方式。
三、软件设计负压爬壁机器人控制系统的软件设计主要包括姿态控制算法、路径规划算法和动力学模型等。
1.姿态控制算法:通过倾角传感器和陀螺仪获取机器人的姿态信息,然后通过PID控制算法对机器人进行姿态控制,使机器人能够保持平衡并沿着墙面行走。
2.路径规划算法:根据机器人当前位置和目标位置,设计路径规划算法确定机器人的运动路径。
可以使用传统的A*算法或者一些启发式算法。
3.动力学模型:基于机器人的动力学模型设计控制算法,实现机器人在墙面上的运动控制。
可以通过电机的转速和吸盘的负压力来调整机器人的运动速度和吸附力。
四、系统测试与优化设计完成后,需要对负压爬壁机器人控制系统进行测试和优化。
爬壁机器人研究现状与技术应用分析
爬壁机器人研究现状与技术应用分析目前,爬壁机器人的研究主要集中在以下几个方面:第一,爬壁机器人的结构设计与材料选择。
为了实现在垂直或倾斜表面的爬行,需要设计具备足够吸附力的足部结构。
研究者通过模仿壁虎等动物的足部结构,设计出了各种新型的吸附装置。
同时,选择合适的材料也是关键,常见的材料包括硅胶、微纳米毛发等。
第二,爬壁机器人的运动控制与感知系统。
爬壁机器人需要基于环境信息进行定位和导航,同时需要通过传感器获取周围环境的变化。
研究者发展了多种导航算法和传感器技术,如视觉导航、激光雷达等,以提高爬壁机器人的感知与控制能力。
第三,爬壁机器人的动力系统研究。
爬壁机器人需要具备足够的动力来支撑其在垂直或倾斜表面上的移动。
为此,研究人员开发了各种类型的动力系统,如电池、电机、液压系统等,以满足不同需求的爬壁机器人。
第一,建筑工程领域。
爬壁机器人可以用于高空外墙维护、玻璃清洗等工作。
与传统人工作业相比,爬壁机器人可以提高作业效率,减少人力风险。
第二,军事领域。
爬壁机器人可以用于侦察、侦查、搜救等任务。
通过在垂直或倾斜表面上自由移动,爬壁机器人可以到达人类无法到达的地方,提供重要的信息。
第三,工业生产领域。
爬壁机器人可以在工业设备等狭小和垂直场所进行作业,如管道检测、焊接等。
这可以提高工业生产的效率和安全性。
第四,医疗领域。
爬壁机器人可以用于内窥镜等医疗设备中,实现更准确、精细的操作。
这对于微创手术和诊断具有重要意义。
总之,随着科技的不断进步,爬壁机器人在各个领域的研究与技术应用正在不断发展。
未来,爬壁机器人有望在更多领域发挥其独特优势,为人们的生产和生活带来更多的便利和安全。
微小型双足爬壁机器人足部传感系统设计

0 引 言
速获取吸附面 和吸盘 的相对 位置 信息 , 以实 现可靠 吸附。
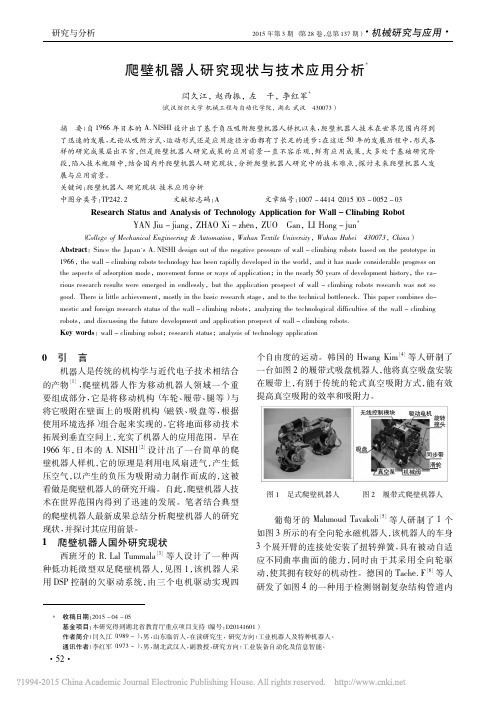
图 1所示为五 自由度气吸 附微小型双足爬壁机器人的足部 三维 图, 足上安装有 1个真空泵 和 1个真空阀 , 足下是 1个
微小型爬壁机 器人 在 民用 和军 用方 面都 有广 阔 的前
景。它可以进入狭窄的工业 管道进行检 测和维修 , 对建 筑
面的平行程度 ; 吸盘旁边安装 2路光纤曲率传感器 , 用来精 确判 断吸盘和吸附面的接触情况 ; 足部 内装有气压传感器, 用来检测吸盘 内真空 度 , 以确定 吸盘 的吸 附状态 ; 主控电
路、 加速度计 、 滤波器 等其他 电路 均封 装在 足部 内部 。此 外, 足上还安装有红外测 距传感 器 、 无线摄像 头 , 以获得多 种环 境信息 。
a e r aie a d g a in fte a s r ln so ti e . r e l d, n r de to d ob pa e i ban d z h Ke r s ci i g r b t b o b b d vc ;s n ig s se y wo d : l mb n o o ;a s r s e ie e sn y tm
Ab t a t C p l r ya s r e h u d t n i h v me t f h l i gr b tT es n i gs se o s r c : u ue f ml d o b d i te f n ai n t e mo e n ec i n o. h e sn y tm n i s o o ot mb o
维普资讯
20 0 7年 第 2 6卷 第 1 2期
) t > 》
传感 器与微系统 ( rnd cr n ir Yt eh o ge) Tasue dM c s r T cnl is a o e n o
爬壁机器人研究现状与技术应用分析_闫久江
爬壁机器人研究现状与技术应用分析*闫久江,赵西振,左干,李红军*(武汉纺织大学机械工程与自动化学院,湖北武汉430073)摘要:自1966年日本的A.NISHI 设计出了基于负压吸附爬壁机器人样机以来,爬壁机器人技术在世界范围内得到了迅速的发展,无论从吸附方式、运动形式还是应用途径方面都有了长足的进步;在这近50年的发展历程中,形式各样的研究成果层出不穷,但是爬壁机器人研究成果的应用前景一直不容乐观,鲜有应用成果,大多处于基础研究阶段,陷入技术瓶颈中,结合国内外爬壁机器人研究现状,分析爬壁机器人研究中的技术难点,探讨未来爬壁机器人发展与应用前景。
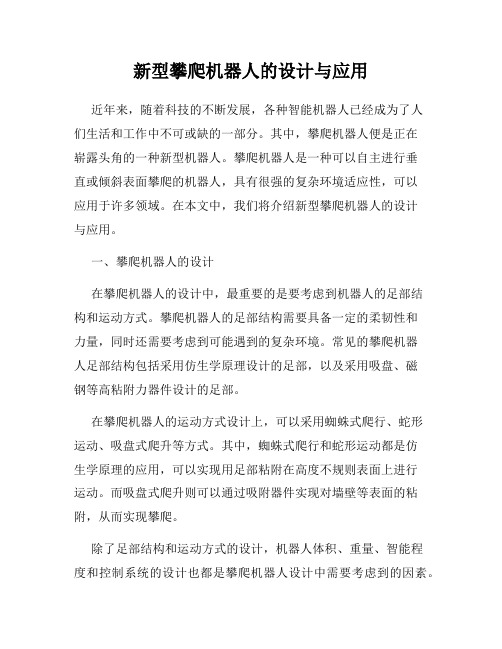
关键词:爬壁机器人研究现状技术应用分析中图分类号:TP242.2文献标志码:A文章编号:1007-4414(2015)03-0052-03Research Status and Analysis of Technology Application for Wall -Climbing RobotYAN Jiu -jiang ,ZHAO Xi -zhen ,ZUOGan ,LI Hong -jun *(College of Mechanical Engineering &Automation ,Wuhan Textile University ,Wuhan Hubei 430073,China )Abstract :Since the Japan's A.NISHI design out of the negative pressure of wall -climbing robots based on the prototype in 1966,the wall -climbing robots technology has been rapidly developed in the world ,and it has made considerable progress on the aspects of adsorption mode ,movement forms or ways of application ;in the nearly 50years of development history ,the va-rious research results were emerged in endlessly ,but the application prospect of wall -climbing robots research was not so good.There is little achievement ,mostly in the basic research stage ,and to the technical bottleneck.This paper combines do-mestic and foreign research status of the wall -climbing robots ,analyzing the technological difficulties of the wall -climbing robots ,and discussing the future development and application prospect of wall -climbing robots.Key words :wall -climbing robot ;research status ;analysis of technology application0引言机器人是传统的机构学与近代电子技术相结合的产物[1],爬壁机器人作为移动机器人领域一个重要组成部分,它是将移动机构(车轮、履带、腿等)与将它吸附在壁面上的吸附机构(磁铁、吸盘等,根据使用环境选择)组合起来实现的,它将地面移动技术拓展到垂直空间上,充实了机器人的应用范围。
爬壁机器人的运动规划与控制

爬壁机器人的运动规划与控制当我们思考机器人时,往往会将其想象成一个可以在平坦地面上自由行走的设备。
然而,现实世界的环境并不总是如此理想。
在许多场景中,机器人需要面对陡峭的墙壁或是垂直的表面。
为了解决这个问题,科学家们开发了一种称为爬壁机器人的设备,它可以沿着垂直表面移动。
爬壁机器人的运动规划与控制是实现机器人对垂直表面爬升能力的关键。
首先,让我们来看看机器人是如何实现爬升的。
通常,爬壁机器人采用两根或多根可伸缩的极细腿,利用粘附力或其他机制在垂直表面上移动。
这些腿的长度可以根据需要进行伸缩和缩短,以便机器人能够适应不同高度的表面。
在运动规划方面,机器人需要确定如何移动腿以实现稳定的爬升。
在这个过程中,机器人需要解决许多问题,如何保持平衡、如何适应表面的倾斜以及如何快速而可靠地适应不同表面高度的变化。
这些问题需要通过高级算法和传感器来解决。
在控制方面,机器人需要根据传感器提供的信息来调整自身姿态和运动。
例如,它可以使用加速度计、陀螺仪和倾斜传感器来感知表面的倾斜角度,然后通过调整腿的长度和角度来保持平衡。
此外,机器人还需要根据传感器反馈来调整粘附力或其他爬升机制,以确保足够的摩擦力以保持机器人在表面上的稳定。
在动力系统方面,爬壁机器人通常使用电动机或压电致动器来驱动腿的运动。
这些驱动器需要具备足够的力和精确的控制能力,以应对不同表面的挑战。
此外,机器人还需要具备足够的能源供应,以确保其持续运行。
为了实现良好的运动规划和控制,机器人需要具备强大的计算和决策能力。
这可以通过在机器人中集成高性能的处理器和算法来实现。
例如,机器人可以使用计算机视觉算法来感知表面的状态和形状,并根据这些信息来进行运动规划和控制。
此外,机器人还可以利用机器学习算法来提高其运动规划和控制的性能,使其能够适应复杂和不确定的环境。
爬壁机器人的运动规划和控制是一个复杂而具有挑战性的问题。
尽管目前已经取得了一些进展,但仍然有许多待解决的难题。
新型攀爬机器人的设计与应用
新型攀爬机器人的设计与应用近年来,随着科技的不断发展,各种智能机器人已经成为了人们生活和工作中不可或缺的一部分。
其中,攀爬机器人便是正在崭露头角的一种新型机器人。
攀爬机器人是一种可以自主进行垂直或倾斜表面攀爬的机器人,具有很强的复杂环境适应性,可以应用于许多领域。
在本文中,我们将介绍新型攀爬机器人的设计与应用。
一、攀爬机器人的设计在攀爬机器人的设计中,最重要的是要考虑到机器人的足部结构和运动方式。
攀爬机器人的足部结构需要具备一定的柔韧性和力量,同时还需要考虑到可能遇到的复杂环境。
常见的攀爬机器人足部结构包括采用仿生学原理设计的足部,以及采用吸盘、磁钢等高粘附力器件设计的足部。
在攀爬机器人的运动方式设计上,可以采用蜘蛛式爬行、蛇形运动、吸盘式爬升等方式。
其中,蜘蛛式爬行和蛇形运动都是仿生学原理的应用,可以实现用足部粘附在高度不规则表面上进行运动。
而吸盘式爬升则可以通过吸附器件实现对墙壁等表面的粘附,从而实现攀爬。
除了足部结构和运动方式的设计,机器人体积、重量、智能程度和控制系统的设计也都是攀爬机器人设计中需要考虑到的因素。
在体积和重量方面,要根据具体的应用场景来进行设计。
智能程度方面,可以根据不同任务需求安装激光雷达、摄像头、压力传感器等多种感知设备,从而提升机器人的自主导航和避障能力。
控制系统方面,可以采用远程无人操作或进行集中控制。
二、攀爬机器人的应用攀爬机器人的应用非常广泛,以下介绍几种常见的应用场景:1. 建筑洗窗。
传统的高层建筑洗窗需要人工完成,具有很大的安全风险。
而使用攀爬机器人进行高层建筑洗窗,可以有效降低安全风险,提高工作效率。
2. 建筑物外部检修。
高层建筑物外部检修需要专业设备和技能,攀爬机器人可以在高处进行检修和维护,同时可以节省人力,提高工作安全性。
3. 能源设备检修。
太阳能电池板、风力发电机等能源设备一旦损坏需要人员进行检修和维护。
而攀爬机器人可以替代人员进行检修和维护,降低作业风险,提高作业效率。
爬壁机器人设计与操作方式标准建设出有
爬壁机器人设计与操作方式标准建设出有随着科技的不断发展,机器人技术正越来越广泛地应用于各个领域,其中之一就是爬壁机器人。
爬壁机器人具备在垂直墙面上移动的能力,可以在高空、狭小空间等人类难以到达的环境中执行任务,为各行各业带来了巨大的便利和效益。
为了确保爬壁机器人的设计与操作方式达到一定的标准,本文将探讨爬壁机器人设计与操作方式的标准建设。
1. 爬壁机器人的设计要求1.1 适应多种环境爬壁机器人应设计成能够适应多种不同垂直墙面的表面材料和结构,例如水泥、玻璃、金属等。
在设计过程中,应考虑机器人的吸附力、稳定性和移动速度等因素,以确保其能够牢固地附着在墙面上并稳定地移动。
1.2 安全性在设计爬壁机器人时,安全性是一个至关重要的因素。
机器人应具备避免摔落的功能,例如采用传感器和算法识别墙面表面的凹凸,以避免机器人因表面不平而摔落。
此外,机器人的电源系统和机械结构也需要经过严格的测试和验证,确保其能够在任何工作环境下安全可靠地运行。
1.3 轻量化和紧凑化设计由于爬壁机器人常常需要在狭小的空间中进行工作,因此,设计时应尽量减小机器人的体积和重量,以提高其机动性和适应性。
同时,机器人的紧凑化设计也有利于减少与墙面的接触面积,从而降低机器人与墙面之间的摩擦力,提高其爬行效率。
2. 爬壁机器人的操作方式标准2.1 遥控操作爬壁机器人通常通过遥控操作来实现。
操作者可以通过遥控设备,如遥控器或手机APP,对机器人进行控制。
遥控操作方式的优点是简单易学,可以迅速掌握机器人的基本操作,缺点是需要操作者具备一定的操作技能和经验。
2.2 自动化操作随着人工智能技术的不断发展,爬壁机器人的自动化操作逐渐成为可能。
通过在机器人中引入各种传感器和算法,可以实现机器人的自主导航、避障和任务执行等功能。
自动化操作方式的优点是减轻操作者的负担,提高工作效率,缺点是需要额外的技术和设备支持。
2.3 远程监控与控制由于爬壁机器人常常工作在高空或狭小空间等人类难以到达的环境中,远程监控和控制是非常重要的。
爬壁机器人原理

爬壁机器人原理
爬壁机器人是一种能够在垂直表面上移动的机器人,它通常被设计用于执行检查、维护、清洁等任务,特别是在需要攀爬高楼大厦或其他垂直结构的环境中。
以下是一般爬壁机器人的原理和设计考虑因素:
吸附力或附着力:爬壁机器人通常使用吸盘、气动吸附、磁性或其他附着技术来在垂直表面上产生足够的附着力。
这确保了机器人能够紧密粘附在墙面上,防止它在运动中脱落。
传动系统:为了在垂直表面上移动,爬壁机器人必须具备适当的传动系统。
常见的传动系统包括轮子、履带、腿部或其他可移动的机构。
这些系统需要具备足够的灵活性和稳定性,以适应不同表面的特性。
感知和导航系统:为了在爬行过程中避免障碍物或调整移动路径,爬壁机器人通常配备了各种感知和导航系统。
这可能包括摄像头、激光传感器、超声波传感器等,以帮助机器人感知周围环境并作出相应的决策。
电源和能源:爬壁机器人需要稳定的电源来驱动其各个部件,以及足够的能源供应,以确保在执行任务时具备足够的工作时间。
一些设计中可能包括可充电电池或连接到外部电源的能源系统。
结构和材料:由于爬壁机器人需要在垂直表面上移动,其结构和材料必须具备足够的强度、轻量性和耐久性。
这可能涉及使用高强度的合金材料或先进的复合材料。
安全性考虑:在设计爬壁机器人时,必须考虑到安全性,特别是在高度或危险环境中的应用。
防止机器人脱离表面、防止外部物体受到机器人运动的影响,以及制定应对机器人故障的安全措施都是重要的考虑因素。
这些原理和设计考虑因素使得爬壁机器人能够在垂直表面上安全、高效地执行各种任务。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
制模块 4 部分组成# 主程序模块从通信模块得到指令, 通过采集
各种传感器信息和调用关节控制模块, 采用基于 有限状态机的步态规划方法实现机器人的运动控 制, 如前进、后退、左转、右转、显示、存储等#主程 序模块还实现对异常情况的处理#
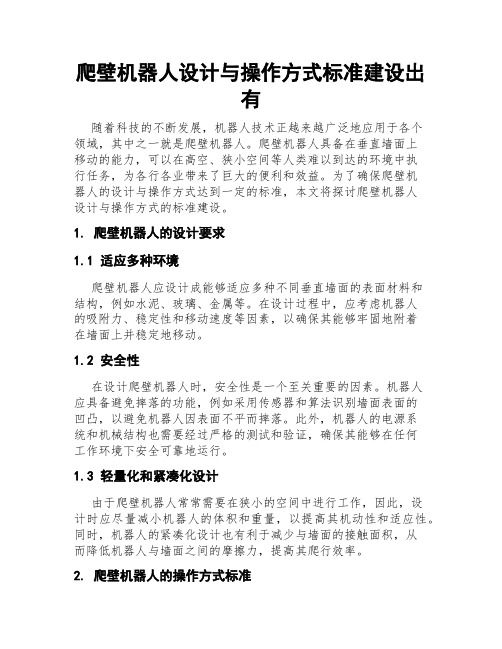
统采用双足真空吸盘式结构和用 3 个电机驱动 5 个关节的欠驱动结构# 双足真空吸盘式结构使其可以在光滑
的墙面和天棚行走, 又能够在交接面之间完成跨 步行走# 而欠驱动结构减少了电机的数目, 从而减小了机器人
的尺 寸和降低了机器人的质量和能量消耗, 但它也给机器 人的控制和运动 规划带来 了新的挑战# 已 完成的 系
第28卷第 10期 2007 年 10 月
东北大学学报( 自然科学版) Journal of Nort heastern U niversity( Natural Science)
Vol128, No. 10 Oct. 2 0 0 7
小型爬壁机器人系统设计与应用
肖 军1, 贾宁宇1, 王洪光2, XI N ing3
足的转动; 当 SW1= 0, SW2= 1 时表示是以 foot2
为支撑足的转动# CUP 1 和 CUP2 综合了压力传感 器、接触传
感器、吸 泵 电 机 的 信 息, 表 明 支 撑 足 状 态 # 若 CUP i = 1, 表明 foot i 与壁面良好吸附, foot i 是
支撑足, 否则 foot i 为自由足# ENDT 用 来 描 述 直 线 运 动 动 作 的 状 态 #
相继研制出应用于一些特殊领域的排爆机器人、
侦察 机器 人等[ 6- 8] , 我国 也开 发了 各 种用 于反 恐、检测、壁面清洗等方面的机器人#但所研制的 爬壁机器人在外形上都过于庞大, 不能满足一些
特殊环境的要求[ 9] #本文描述了一种新型的双足 爬壁机器人, 该机器人系统采用双足真空吸盘式
结构, 具有 5 个自由度, RRPRR 结构#为了减少 机器人质量, 采用了 3 个电机驱动 5 个关节的欠 驱动结构#机器人吸盘足由吸盘、真空泵、压力传 感器、接触传感器、微型气阀等元件组成# 该机器 人具有尺寸小( 长约 100 mm , 宽约 60 mm, 高约
性, 下面以左支撑足的前进为例介绍所设计的运
动模式# 左支撑足的前进运动模式步态规划如表 1 所
示#设电机 1, 2, 3 分别为 foot 1、机身和 foot 2 的 驱动电机#
首先关闭 foot 2 泵电机, 打开排气阀, 检测压 力传感器信号, 直至 f oot 2 吸盘足脱离吸附状态;
电机 3 驱动 f oot 2 抬起, 电机 2 驱动机器人伸长
( 1. 东北大学 信息科学与工程学院, 辽宁 沈阳 110004; 2. 中国科学院 沈阳自动化研究所, 辽宁 沈阳 110008; 3. M ichigan S tate U niversit y, East Lansing, M I48824)
摘
要: 针对一种小型的双足爬壁机器人, 设计开发 了基于 DSP 2812 处理芯片的控 制系统# 该机器 人系
Abstract: A cont rol system based on DSP2812 w as designed for a new miniat ure bipedal climbing robot , adopt ing t he bipedal suct ion feet and an under- actuat ed m echanism wit h t hree mot ors t o drive f ive joints. T he suct ion feet make t he robot available t o climb on a smoot h plane or ceiling and t ransit t he passage betw een tw o inclined surf aces. T he under- actuat ed mechanism can reduce the number of motors required hence the robot size/ w eight and power consumpt ion. H owever, it imposes challeng es on robot control and mot ion planning. T he mot ion mode, joint control, communicat ion module and suct ion cup foot control have all been designed, and the ex periment al results have verif ied the validit y of t he desig n schem e proposed. Key words: climbing robot ; f init e state machine; com municat ion; PID cont rol; mot ion planning
XI A O Jun 1, JIA N i ng-y u1, WA N G H ong-guang2, X I N i ng3
( 1. School of Information Science & Engineer ing , Nort heaster n U niv ersity, Shenyang 110004, China; 2. Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110008, China; 3. M ichigan State U niversity, East L ansing, M I48824, U SA . Cor respondent: XIAO Jun, E- mail: xiaojun @ ise. neu. edu. cn)
通信模块主要实现机器人与 PC 机的串口通 信、机器人与遥控器的无线通信以及视频图像的
无线传输#当机器人本体上的通信模块接收到远 端遥控器发送的命令后, 按照接收先后顺序存储 指令#
关节控制模块通过位置检测, 梯形规划, 采用 PID 控制算法, 驱动关节运动# 吸盘 足控制模块 根据运动指令和吸盘内外的压力传感器和转换开
第 10期
肖 军等: 小型爬壁机器人系统设计与应用
14 43
1 000 m) , 从而完成对环境的侦察 与检测#机器 人本体与基站通过无线传输系统来实现控制指令
的传输及图像传输, 基站可对收到的图像进行实 时显示和存储#而操作者可根据环境监测的要求 在一定范围内调整机器人的运动状态#
1 系统总体设计
3 关节控制模块
关节控制模块主要包括位置检测、梯形规划, PID 控制等内容#其控制流程如图 1 所示#
机身; 电机 3 反转驱动 foot 2 落下, 检测触觉传感 器信号, 微调足部姿态, 使吸盘足与平面良好接
触; 关闭 foot 2 排气阀, 启动泵电机, 检测压力传
感器信号, 直到 f oot 2 可靠吸附#然后打开 foot 1 排气阀, 关闭泵电机, 检测压力传感器信号直至
1 444
东北大学学报( 自然科学版)
统设计包括运动模式设计、关节控制、通信模块设计和吸盘足控制等# 实验结果证明了所提出方案的可行性#
关 键 词: 爬壁机器人; 有限状态机; 通信; P ID 控制; 步态规划
中图分类号: T : 1005- 3026( 2007) 10-1442- 04
System Design and Application of a Miniature Climbing Robot
右转, 右支撑足的前进、后退、左转和右转# 有限状态机中状态位定义如下:
F SM : | ENDR| ENDT | CUP2 | CUP1| SW2|
SW1| # SW1 和 SW2 表示放置在机身下端的转换开
关的状态, 用来标识基本运动动作的改 变#SW1 和 SW2 两个状态联合 表示当前的运 动动作#当 SW1= 0, SW2= 0 时为直线运动状态; 当 SW1= 1, SW2= 0 时表示当前的动作是以 foot 1 为支撑
ENDT = 0 表示当前处于直线运动; ENDT = 1 表
示当前完成直线运动任务#ENDR 用来描述旋转 运动动作的状态#ENDR= 0 表示当前处于转动动 作; ENDR= 1 表示转动结束# 2. 3 运动模式设计
如前所述, 爬壁机器人共有 8 种运动模式, 考 虑到左、右足的对称性以及基本运动动作的对称
第 28 卷
foot 1 吸盘足脱离吸附状态; 电机 1 驱动 foot 1 抬 起, 电机 2 反转驱动机器人机身收缩; 电机 1 反转 驱动 foot 1 落下, 检测触觉传感器信号, 微调足部 姿态; 关闭 foot 1 排气阀, 启动泵电机, 检测压力 传感器信号, 直到 foot 1 可靠吸附#至此, 爬壁机 器人完成一步直线行走, 行走距离为机器人机身 伸长长度#
近年来, 特种机器人的开发受到了越来越多 的关注#高层建筑物 的清洁[ 1] 、核设 施的检查与 维护[ 2] 、消 防与抢险工作[ 3] 、危险环境的 远程监 测[ 4] 等, 这些实际问题都对特种机器人的开发提
出了迫切的要求#爬壁机器人由于可吸附在墙面 并可以携带一定的传感器和仪器而成为这类环境 下的最佳选择[ 5] #目前世界各国对于爬壁机器人 的研究已经取得了丰富的成果, 美、英、法、德等国
关等信息对真空泵和微型阀进行控制, 实现吸盘 足与壁面的吸附和释放#