转向系统设计计算书
汽车转向系统设计计算

第3章设计计算3.1 汽车转向系主要参数的选择3.1.1 汽车主要尺寸的确定汽车的主要尺寸参数包括轴距、轮距、总长、总宽、总高、前悬、后悬、接近角、离去角、最小离地间隙等,如图3-1所示。
图3-1汽车的主要参数尺寸(1)轴距轴距L的选择要考虑它对整车其他尺寸参数、质量参数和使用性能的影响。
轴距短一些,汽车总长、质量、最小转弯半径和纵向通过半径就小一些。
但轴距过短也会带来一系列问题,例如车厢长度不足或后悬过长;汽车行驶时其纵向角振动过大;汽车加速、制动或上坡时轴荷转移过大而导致其制动性和操纵稳定性变坏;万向节传动的夹角过大等。
因此,在选择轴距时应综合考虑对有关方面的影响。
当然,在满足所设计汽车的车厢尺寸、轴荷分配、主要性能和整体布置等要求的前提下,将轴距设计得短一些为好。
轻型货车、鞍式牵引车和矿用自卸车等车型要求有小的转弯半径,故其轴距比一般货的短,而经常运送大型构件、长尺寸或轻抛货物的货车和集装箱运输车,则轴距可取得长一些。
汽车总质量愈大,轴距一般也愈长。
轴距L对整备质量、汽车总长、最小转弯直径、传动轴长度、纵向通过半径有影响。
当轴距短时,上述各指标减小。
(2)前轮距B1和后轮距B2改变汽车轮距B会影响车厢或驾驶室内宽、汽车总宽、总质量、侧倾刚度、最小转弯直径等因素发生变化、增大轮距则车厢内宽随之增加,并导致汽车的比功率、币转矩指标下降,机动性变坏。
受汽车总宽不得超过2.5m限制,轮距不宜过大。
但在选定的前轮距B1范围内,应能布置下发动机、车架、前悬架和前轮,并保证前轮有足够的转向空间,同时转向杆系与车架、车轮之间有足够的运动间隙。
在确定后轮距B2时,应考虑两纵梁之间的宽度、悬架宽度和轮胎宽度以及它们之间应留有必要的间隙。
(3)外廓尺寸汽车的外廓尺寸包括其总长、总宽、总高。
它应根据汽车的类型、用途、承载量、道路条件、结构选型与布置以及有关标准、法规限制等因素来确定。
GB1589-79 对汽车外廓尺寸界限做了规定,总高不大于4m,总宽(不包括后视镜)不大于2.5m;外开窗,后视镜等突出部分宽250mm。
汽车转向设计与计算

转向系统的计算设计:这次设计的电动车用的是麦弗逊式独立悬架,采用分段式转向梯形机构。
对于采用独立悬架的汽车转向车轮,转向梯形中的横拉杆应是分段式的,以避免运动干涉,防止一个车轮的上下跳动影响另一个车轮的跳动。
(图一)这种转向系统的结构大多如图1所示。
转向轴1的末端与转向器的齿轮轴2直接相连或通过万向节轴相连;齿轮图2与同装于一壳体内的齿条3啮合。
外壳则固定于车身或车架上。
齿条通过两端的球铰接头与两根分开的横拉杆4相连,两横拉杆又通过球头销与左右车轮上的梯形臂5、6相连。
这里齿条3既是转向器的传动件又是转向梯形机构中三段式横拉杆的一部分。
齿轮—齿条式转向器具有结构简单紧凑,制造工艺简便等优点,不仅适用于整体式前轴也适用于前轮采用独立悬架的断开式前轴,目前广泛地被采用于轿车、轻型客货车、微型汽车等车辆上。
但与之相配的转向梯形机构与传统的整体式转向梯形机构相比有其特殊之处。
故有必要加以研究和探讨。
绝大多数齿轮一齿条式转向器都布置在前轴后方,这样既可避让发动机的下部,又便于与转向轴下端连接。
安装时齿条中心线应与汽车纵向对称轴垂直;并且当转向器处于中立位置时,齿条两端球铰中心应对称地处于汽车纵向对称轴的两侧。
对于给定的汽车,其轴距L、主销后倾角口以及左右两主销轴线延长线与地面交点间距离K均为已知定值。
对于选定的转向器,其齿条两端中心距M也为已知定值.故在设计中需确定的参数为梯形底角、梯形臂长l以及齿条中心线到梯形底边的安装距1离,而横拉杆长度l可由上述参数确定其表达式为。
2转动转向盘时,齿条便向左或向右移动,使左右两边的杆系产生不同的运动,从而使左右车轮分别获得一个转角。
以汽车左转弯为例,此时右轮为外轮,外轮一侧的杆系运动如图2所示。
设齿条向右移过某一行程S,通过右横拉杆推动右梯形臂,使之转过。
(图二)取梯形右底角顶点O为坐标原点,X、Y轴方向如图2所示,则可导出齿条行程S与外轮转角的关系:另外,有图像可知:而+arctan-(图三)为坐标原点,X、Y轴方向如图3所示,则同样可导出齿条行程取梯形左底角顶点O1S与内轮转角的关系,即:众所周知,在不计轮胎侧偏时,实现转向轮纯滚动、无侧滑转向的条件是内、外轮转角具有如图4所示的理想的关系,即(图四)(6)式中T—计及主销后倾角夕时的计算轴距主销后倾角3°计算得T=2800+693/2tan3=2818L—汽车轴距2800mmr—车轮滚动半径346.5mm由(6)式可将理想的内轮转角民,表示为设计变量:、底角y和安装距对于给定的汽车和选定的转向器,转向梯形机构尚有梯形臂长11离h三个设计变量。
转向系统设计计算匹配

1 转向系统的功能1.1 驾驶者通过方向盘控制转向轮绕主销的转角而实现控制汽车运动方向。
对方向盘的输入有两种方式:对方向盘的角度输入和对方向盘的力输入。
装有动力转向系统的汽车低速行驶时,操作方向盘的力很轻,却要产生很大的方向盘转角输入,汽车的运动方向纯粹是由转向系统各杆件的几何关系所确定。
这时,基本上是角输入。
而在高速行驶时,可能出现方向盘转角很小,汽车上仍作用有一定的侧向惯性力,这时,主要是通过力输入来操纵汽车。
1.2 将整车及轮胎的运动、受力状况反馈给驾驶者。
这种反馈,通常称为路感。
驾驶者可以通过手—---感知方向盘的震动及运转情况、眼睛—---观察汽车运动、身体—---承受到的惯性、耳朵—---听到轮胎在地面滚动的声音来感觉、检测汽车的运动状态,但最重要的的信息来自方向盘反馈给驾驶者的路感,因此良好的路感是优良的操稳性中不可缺少的部分。
反馈分为力反馈和角反馈从转向系统的功能可以得知:人、车通过转向系统组成了人车闭环系统,是驾驶者对汽车操纵控制的一个关键系统。
2 转向系统设计的基本要求转向系是用来保持或者改变汽车行驶方向的机构,在汽车转向行驶时,保证各转向轮之间有协调的转角关系。
转向系的基本要求如下:2.1 汽车转弯时,全部车轮应绕瞬时回转中心(瞬心)旋转,任何车轮不应有侧滑。
不满足这项要求会加剧轮胎磨损,并降低汽车的操作稳定性。
实际上,没有哪一款汽车能完全满足这项要求,只能对转向梯形杆系进行优化,一般在常用转向角内(内轮15°~25°范围)使转向内外轮运动关系逼近上述要求。
2.2 良好的回正性能汽车转向动作完成后,在驾驶者松开方向盘的条件下,转向轮能自动返回到直线行驶位置,并稳定行驶。
转向轮的回正力矩的大小主要由悬架系统所决定的前轮定位参数确定,一般来说,影响汽车回正的因素有:轮胎侧偏特性、主销内倾角、主销后倾角、前轮外倾、转向节上下球节的摩擦损失、转向节臂长、转向系统的逆效率等。
转向系统设计计算报告
目录1.系统概述........................................... 错误!未定义书签。
系统设计说明.................................... 错误!未定义书签。
系统结构及组成.................................. 错误!未定义书签。
系统设计原理及规范.............................. 错误!未定义书签。
2.输入条件........................................... 错误!未定义书签。
标杆车基本参数.................................. 错误!未定义书签。
LF7133确定的整车参数........................... 错误!未定义书签。
3.系统计算及验证..................................... 错误!未定义书签。
方向盘转动圈数.................................. 错误!未定义书签。
齿轮齿条式转向系的角传动比...................... 错误!未定义书签。
车轮实际最大转角................................ 错误!未定义书签。
静态原地转向阻力矩.............................. 错误!未定义书签。
静态原地转向时作用于转向盘的力.................. 错误!未定义书签。
最小转弯半径的校核.............................. 错误!未定义书签。
4.总结............................................... 错误!未定义书签。
参考文献.............................................. 错误!未定义书签。
矿用自卸车转向设计计算说明书
矿用自卸车转向设计计算说明书设计:陈琼校核:审核:批准:目录一、转向系统相关参数 (2)二、最小转弯半径计算 (3)三、理论转角和实际转角关系 (4)四、转向阻力矩计算 (5)五、转向机的选择计算 (5)六、转向动力缸的选择计算 (8)七、转向油泵的匹配计算 (9)1、转向机理论流量计算2、动力缸理论流量计算3、油泵排量计算4、油泵的选择八、转向升缩轴升缩量计算 (13)九、动力缸行程计算 (14)十、转向系的运动校核 (17)设计原则本车转向系统的设计应使得整车具有良好的操纵稳定性,转向轻便性,并使得上述性能达到国外同类车型的先进水平,保证车辆行驶安全性。
一、转向系统相关参数表一整车参数前轮胎采用14.00-25,轮辋偏置距207.5mm,负荷下静半径为640mm,满载下前胎充气压力850kpa二、最小转弯半径:对于只用前桥转向的三轴汽车,由于中轮和后轮的轴线总是平行的,故不存在理想的转向中心。
计算转弯半径时,可以用一根与中、后轮轴线等距离的平行线作为似想的与原三轴汽车相当的双轴汽车的后轮轴线。
图一转弯半计算图最小转弯半径R=9975+(2471-2100)/2=10160.5mm二、理论转角和实际转角关系图2 内外轮实际转角关系图图3 内外轮理论转角关系图根据图2和图3得出表二数据表二外轮转角(°) 0 5 10 15 20 25 27.3 阿克曼理论内轮转角(°) 0 5.1 10.6 16.4 22.8 30.7 34.1由上图可见在外轮转角在0°—27.3°范围内,实际转角关系与阿克曼转角关系较接近,与阿克曼理论值差值在2°以内,转向桥梯形臂符合设计要求。
四、转向力计算1.转向阻力矩计算转向时驾驶员作用到转向盘上的手力与转向轮在地面上回转时产生的转向阻力矩有关。
影响转向阻力矩的主要因素有转向轴的负荷、轮胎与地面之间的滑动摩擦系数和轮胎气压。
某客车转向系统匹配计算报告
XXXXXXX转向系统计算书编制:审核:批准:前言XXXXXXXXXXXXXXXXXX市场的需求而开发的旅游客车。
转向系统设计既要满足整车设计要求,又要遵循以下原则:1.尽可能采用通用件,提高零部件的通用性;2.系统良好的可靠性、操纵性;3.系统及零部件调整及维修的便利性。
1、输入数据前轴负荷:N G 441008.945001=⨯≤。
转向器参数:转向泵参数:发动机参数:2、根据原地转向阻力矩R M 选择转向器根据半经验公式,原地转向阻力矩可由下式计算:PG f M R 313=--------------公式1 式中:R M 车轮转向阻力矩Nm ;f 轮胎与地面的滑动磨擦系数,一般取f =0.7; 1G 前轴负荷(N );P 前轮气压(MPa)(双钱轮胎气压830kPa ); 代入数据得:Nm M R 90.237183.04410037.03==转向器最大输出扭矩K M 选取时,要满足R K M M ≥,一般取Nm M M R K 9.211712.1=≥,这样可以较好发挥转向器的效率,并保持液压系统有一个良好的工况。
2.1原地转向时作用在转向盘上的手力如果忽略摩擦损失,根据能量守恒原理,h R M M 2为:+==sg w h R i d d M M ηβϕ0 -----------------公式2 式中:h M 为作用在转向盘上的力矩;0w i 为转向系角传动比;+sg η为转向器正效率,取0.85。
0w i 又由转向器角传动比w i 和转向传动机构角传动比'w i 所组成,其中27.23=w i 、12'w L L i =。
1L 为垂臂长210mm ,2L 为转向节臂长234mm 。
作用在转向盘上的手力h F 为:swhh D M F 2= -----------------公式3 式中:sw D 为转向盘直径。
将公式2代入公式3后得到: N i L D L M F sg w sw R h 795x 14.0x 0.850.45x 0.23421x 2371.9x 0.2221===+η按上式计算出的作用力超出了人的正常体力范围,但采用动力转向即可解决这一问题。
转向系统设计说明书

转向系统设计说明书转向系统设计说明书一、需求分析1.1系统简介本转向系统设计是为汽车制造企业设计的一款新型转向系统,包括方向盘、转向齿轮、转向杆等组件,用于汽车转向操作。
1.2系统功能本系统主要实现以下功能:(1)实现车辆转向操作;(2)提供灵敏度和舒适性,使驾驶员可以轻松驾驶;(3)确保车辆转向时的安全性。
1.3使用环境本系统主要用于汽车行驶时的转向操作,适用于各类车辆,包括小汽车、大型客车、货车、越野车等。
1.4系统需求(1)具有可靠性和耐用性;(2)转向灵敏度高,操控舒适;(3)保证转向操作安全;(4)可适应各种驾驶员的需求。
二、系统设计2.1系统架构本转向系统采用传统的齿轮传动转向系统。
主要包括方向盘、转向齿轮、转向杆等组件,在行驶过程中通过变换转向齿轮的位置,控制车轮的转向。
2.2系统组成本转向系统包括以下组件:(1)方向盘:由驾驶员操控,控制转向的方向。
(2)转向齿轮:连接车轮的转向轴,通过旋转控制车轮角度,实现左右转向操作。
(3)转向杆:将方向盘的旋转运动转换成转向齿轮的轴向运动。
(4)轴承:用于支撑转向齿轮,使其顺畅运转。
2.3系统工作原理当驾驶员通过方向盘控制转向时,方向盘传递力量到转向齿轮上,通过转向齿轮转动和转向杆的传动作用,使车轮转向。
其中,转向齿轮是通过齿轮副传动,将方向盘的旋转运动转换成轴向运动,控制车轮的转向角度。
2.4系统性能(1)灵敏度:驾驶员控制方向盘时,系统应能快速反应,确保车辆转向灵敏。
(2)舒适性:转向时不应有任何异响或抖动感,使驾驶员的操控更加舒适。
(3)可靠性:系统应具有较高的可靠性和耐久性,确保在各种路况下的转向操作安全。
三、结论本转向系统是一种新型的汽车转向系统,采用传统的齿轮传动技术,实现车辆转向操作。
系统整体性能较强,灵敏度高、舒适性好、可靠性强。
同时,本系统还具有可扩展性,在不断的设计应用和技术进步中,可为用户提供更多更好的服务。
转向系统设计计算书
密级:编号: “中国高水平汽车自主创新能力建设”项目名称:“中气”底盘研究与开发转向系统设计计算书编制: 张 璐、田 野 日期: 校对: 日期: 审核: 日期: 批准: 日期:上海同济同捷科技股份有限公司长春孔辉汽车科技有限公司2008年12月目 录1 概述.........................................................................................................................- 1 -2 主要设计参数.........................................................................................................- 1 -3 转向梯形机构校核.................................................................................................- 2 -3.1 阿克曼理论..........................................................................................................- 2 -3.2 实际转角关系......................................................................................................- 3 -3.3 实际转角差与理想转角差的比率关系..............................................................-4 -3.4 模拟分析校核转向梯形机构..............................................................................- 4 -3.5 转向梯形参数......................................................................................................- 6 -4 转向传动轴等速性校核.........................................................................................- 6 -4.1 转向传动轴的夹角..............................................................................................- 7 -4.2 转向传动轴的仿真运动......................................................................................- 8 -5 转向系统匹配计算.................................................................................................- 8 -5.1 静态原地转向阻力矩..........................................................................................- 8 -5.2 转向系传动比......................................................................................................- 9 -5.3 静态原地转向无助力时方向盘手力.................................................................- 11 -5.4 最小转弯直径.....................................................................................................- 11 -6 转向系统的选型计算............................................................................................- 11 -6.1 动力转向器的选型计算.....................................................................................- 11 -6.2 动力转向泵的选型计算....................................................................................- 13 -6.3 动力转向油罐的选型计算................................................................................- 15 -6.4 动力转向管路的选型计算................................................................................- 16 -参考文献...................................................................................................................- 17 -1 概述本车型为液压助力转向系统;采用齿轮齿条式转向器,转向器形式为侧面输入、两端输出,转向器位于前轴后方,为后置梯形结构;转向操纵机构采用四辐条式转向盘和双万向节式传动轴。
转向系统校核计算与设计指南
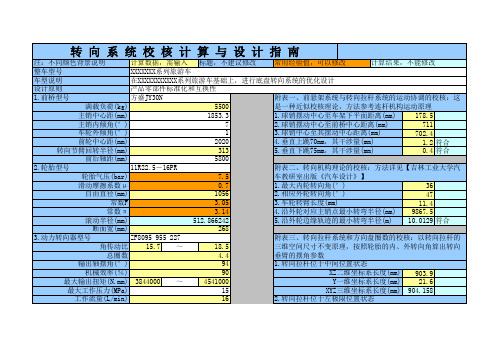
怠速(r/min)
600 ~
7.转向拉杆规格
φ42X8钢拔管
球头一总成型号 33R13-01066
球头一球销直径(mm)
球销沿其中心摆角(°)
球头二总成型号 3303E-059/060
球头二球销直径(mm)
球销沿其中心摆角(°)
8.方向盘半径(mm)
9.悬架型式
纽威ASB-140气簧
300
21 14 16 3600 500 1
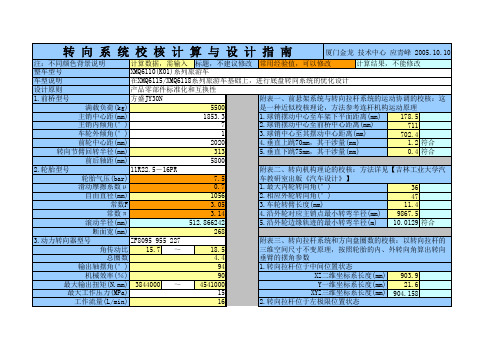
转向系统校核计算与设计指南
注:不同颜色背景说明
计算数据,需输入 标题,不建议修改 常用经验值,可以修改
计算结果,不能修改
整车型号
XXXXXXX系列旅游车
车型说明
在XXXXXXXXXXX系列旅游车基础上,进行底盘转向系统的优化设计
设计原则
产品零部件标准化和互换性
1.前桥型号
方盛JY30N
附表一、前悬架系统与转向拉杆系统的运动协调的校核:这
268
3.动力转向器型号
ZF8095 955 227
附表三、转向拉杆系统和方向盘圈数的校核:以转向拉杆的
角传动比 15.7 ~
18.5
三维空间尺寸不变原理,按照轮胎的内、外转向角算出转向
总圈数
4.4
垂臂的摆角参数
输出轴摆角(°)
94
1.转向拉杆位于中间位置状态
机械效率(%)
90
XZ二维坐标系长度(mm) 903.9
转向节臂计算力臂(mm) 259.6
转向垂臂计算力臂(mm)
211
原地阻力矩换算到当量杆上的阻力(N) 12990.07
动力转向器输出到当量杆的拉力(N) 21233.17 符合
转向助力泵作用,方向盘的转动力(N) 31.09952
重型卡车双前桥转向系统开发计算说明书
编号北奔威驰8×4宽体矿用车1950轴距转向系统开发计算说明书编制审查审定标准化审查批准包头北奔重型汽车有限公司研发中心2010年7月22日1 计算目的双前桥四轴车在转向过程中,理论上要求所有车轮都处于纯滚动,或只有极小滑动,为达到这一目的,要求所有车轮绕一瞬时转动中心作圆周运动。
每个转向桥的梯形角匹配设计,是为满足车轮的理论内外转角特性曲线与实际内外转角特性曲线尽可能的接近;第一、二转向前桥转向摇臂机构设计是为了让第一、二转向前桥最大内转角与轴距之间的理论关系与实际关系尽可能的相匹配。
本次计算是为新开发的8×4宽体车XC3700KZ 匹配北奔高位宽体前桥的转向系统中转向传动机构和转向动力机构中各元件的选型及尺寸提供理论依据。
2 采用的计算方法、公式来源和公式符号说明符号定义及赋值如下:1α为第一转向前桥外转角,1β为第一转向前桥内转角 2α为第二转向前桥外转角,2β为第二转向前桥内转角1L 为第一转向前桥主销中心线与地面的交点到第三桥轴线的距离 2L 为第二转向前桥主销中心线与地面的交点到第三桥轴线的距离3 计算过程及结果 3.1 转向动力系统参数计算3.1.1 原地转向阻力矩计算① 状态一:第一、二转向桥载荷按标准载荷13T 计算 已知参数如下:第一转向桥、第二转向桥的轴荷为1G =2G =13000×9.8=127400 N 轮胎气压1P =0.77Mpa滑动摩擦系数μ=0.6(干燥土路)滚动摩擦系数f =0.035(干燥压紧土路推荐0.025-0.035) 轮胎自由半径0r =685mm 轮胎静力半径1r =670mm 侧偏距a =204mm内轮最大转角max α=35.74°[借用现有一桥拉杆及垂臂W3400112AE 极限内转角](新设计垂臂936 463 00 01使转角能达到车轮极限转角38度)轮胎宽度1B =375mm轮胎接地面积8212BK ==175782mm ,K=132.6mm主销内倾角Φ=6°对于单桥的原地转向阻力矩,有如下计算方式: A.按半经验公式计算131P G 3μ=半M =77.012740036.03 =10364271 N.mm =10364 N.mB.按采用雷索夫公式()2s 201r r 0.5a f G -+⋅⨯μ=雷M=127400×(0.035×204+0.5 ×0.6×22670685-)=6358499 N.mm =6358 N.mC.采用经验公式max11sin sin a G a G αφμ=经⋅⋅⋅+⋅⋅M=127400×204×0.6+127400×204×sin6°×sin35.74° =17181 N.mD.算术平均求阻力矩为了使计算更趋合理,避免上述四种公式单独使用时与实际工造成的误差,故用以上三种方式求得的阻力矩的算术平均值作为静态原地转向阻力矩0s M 。
8-4双转向系统设计计算书0206

8*4双前轴转向系统设计校核第一部分8*4自卸汽车的双转向系统校核根据《4048D/QX3340自卸汽车底盘(欧四)设计任务书》及客户的要求,伊朗4048D欧四自卸汽车底盘为双转向前桥,转向系统采用循环球液压助力转向系统,第二转向前桥采用液压缸助力,一、二桥轴距为1950mm。
转向桥初步采用陕西汉德车桥生产的曼系列7.5吨盘式制动前轴,具体参数见表1;转向垂臂初步选用中国重汽豪沃A7双转向系统,具体尺寸见图1;转向器采用ZF公司生产的图号为8098.957.111的转向器,转向油泵采用ZF公司生产的图号为7077.955.636的叶片泵;转向油罐采用株洲湘火炬生产的产品。
表1 曼系列7.5吨盘式制动前桥图1重汽豪沃A7双转向系统布置图一、对一、二桥转向运动干涉进行校核根据转向系统的布置,用作图法分别作出转向节臂球销中心A点绕摆动中心O’和转向垂臂下端球销中心的运动轨迹圆弧JJ’、KK’,测量在板簧动、静挠度范围内的最大误差值,从以上结果可以看出一、二桥的转向节臂轨迹误差都在10mm以内,符合要求。
二、分别计算出一、二桥的内外转角关系1、根据作图可得出两主销中心线延长线到地面交点之间的距离K=1879.52、校核梯形臂的长度根据经验,梯形臂长度m一般取(0.11~0.15)K故m=(0.11~0.15)*K=(0.11~0.15)*1879.5=206.75~281.93m=255.7是符合要求的3、初步选择梯形底角θ0根据式tgθ0=(4*L)/(3*K),可以得出一桥梯形底角θ0为77.5°,二桥梯形底角为72.3°根据计算出的梯形底角与实际车桥的梯形底角有较大的差异,建议采用作图法或计算的方法进行校核。
4、校核梯形底角a、用作图法作出第一桥梯形底角为77°时,内外转角关系图2b、用作图法作出第二桥梯形底角为72°时,内外转角关系图3c、根据第一、二桥内外转角的关系分别作出一、二桥转向梯形的实际特性曲线图4由以上曲线可以看出:转向梯形的实际特性曲线在0~30°范围内比较接近理论转向梯形特性曲线。
动力转向系统设计、性能计算

5.3动力转向系统设计、性能计算为了减轻转向时驾驶员作用到转向盘上的手力和提高行驶安全性,在有些汽车上装设了动力转向机构。
中级以上轿车,由于对其操纵轻便性的要求越来越高,采用或者可供选装动力转向器的逐渐增多。
转向轴轴载质量超过2.5t的货车可以采用动力转向,当超过4t时应该采用动力转向。
5.3.1对动力转向机构的要求1)运动学上应保持转向轮转角和驾驶员转动转向盘的转角之间保持一定的比例关系。
2)随着转向轮阻力的增大(或减小),作用在转向盘上的手力必须增大(或减小),称之为“路感”。
3)当作用在转向盘上的切向力F≥0.025~0.190kN时(因汽车形式不同而异),动力转向h器就应开始工作。
4)转向后,转向盘应自动回正,并使汽车保持在稳定的直线行驶状态。
5)工作灵敏,即转向盘转动后,系统内压力能很快增长到最大值。
6)动力转向失灵时,仍能用机械系统操纵车轮转向。
7)密封性能好,内、外泄漏少。
5.3.2动力转向机构布置方案分析液压式动力转向因为油液工作压力高,动力缸尺寸小、质量小,结构紧凑,油液具有不可压缩性,灵敏度高以及油液的阻尼作用可吸收路面冲击等优点而被广泛应用。
1.动力转向机构布置方案由分配阀、转向器、动力缸、液压泵、贮油罐和油管等组成液压式动力转向机构。
根据分配阀、转向器和动力缸三者相互位置的不同,它分为整体式(见图5—8a)和分置式两类。
后者按分配阀所在位置不同又分为:分配阀装在动力缸上的称为联阀式,(见图5—8b);分配阀装在转向器和动力缸之间的拉杆上称为连杆式,(见图5—8c);分配阀装在转向器上的称为半分置式,(见图5—8d)。
图5—8 动力转向机构布置方案图1-分配阀2-转向器3-动力缸在分析比较上述几种不同动力转向机构布置方案时,常从结构上是否紧凑;转向器主要零件是否承受由动力缸建立起来的载荷;拆装转向器是否容易;管路,特别是软管的管路长短;转向轮在侧向力作用下是否容易引起转向轮摆振;能不能采用典型转向器等方面来做比较。
K01H-PD-DP-007转向系统计算报告

编号:K01H-PD-DP-007转向系统计算报告项目名称:K01H编制: 1 日期: 1 校对: 1 日期: 1 审核: 1 日期: 1批准:1 日期:一1东风小康汽车有限公司2012 年6月目录1 概述 (1)2 与转向系统相关的整车参数(测量数据) (1)3 最小转弯半径 (2)3.1 转向梯形分析: (2)3.2 最小转弯半径确定 (3)4 转向系载荷的确定 (3)4.1 原地转向阻力矩 (3)4.2 车轮回正阻力矩 (4)4.3 转向系角传动比 (4)4.4 不带助力时作用在转向盘上的力 (4)5 转向管柱布置校核 (5)5.1 标杆车转向管柱布置角度 (5)5.2 转向管柱角速度及力矩波动计算 (5)6 结论 (8)参考文献 (8)1概述K01H转向管柱为角度不可调式管柱,转向机采用结构简单、布置容易的齿轮齿条式转向机。
转向盘采用软发泡四辐式,轮辐中间有一块大盖板,打开时可拆装调整转向盘。
在进行转向系统设计时需要考虑整车各方面的因素。
结构参照下图。
2与转向系统相关的整车参数(测量数据)表1转向系统参数基本参数单位数值轴距L mm 2760空载时主销距K1 mm 1224.3满载时主销距K2 mm 1244空载前轴何G1 kg 510满载前轴荷G2 kg 645方向盘外径mm 365方向盘总圈数1 4.3空载内轮最大转角B 1 deg 38.3空载外轮最大转角a 1 deg 35.3满载内轮最大转角B2 deg 38.4满载外轮最大转角a 2 deg 35空载时主销偏置距C1 mm 23.1满载时主销偏置距C2 mm 22.7四轮定位参数主销内倾角deg 空载8.5 满载9.4主销后倾角deg 空载3.1 满载3.3车轮外倾角deg 空载2.44 满载1.61前轮前束deg 空载0.08 满载-0.19图1转向系统前轮胎规格有两种,参数分别为:①165/70R14-81T,轮辋偏置距为35mm,负荷下静 半径为268mm ,滚动半径285mm,满载下前胎充气压力260KPa 。
转向系统设计说明书

转向系统设计说明书设计原则:通过对所开发车型与已开发同类车型(或标杆车)的比较及所开发车型的前桥负荷,初步确定转向器总成的结构和相关参数。
故在选取时应遵循以下原则;1、转向器结构选型原则:1)、依据整车布置尺寸,确定转向器结构尺寸。
2)、依据使用和成本状况,确定是否使用通气螺塞。
2、转向器参数选型原则:1)、依据转向盘布置形式,确定是左置转向器或右置转向器。
2)、依据前桥负荷,选定转向器输出扭矩及输入轴花键。
3)、依据车型的最小转弯半径确定转向摇臂输出摆角能否满意使用要求。
4)、依据产品信函(或项目描述书)所描述的整车的使用状况,确定转向传动比是否采纳变传动比形式。
5)、依据产品信函(或项目描述书)所描述的整车的使用状况,确定传动间隙特性。
3、转向摇臂选型原则:1)、依据标杆车进行类比。
2)、依据车型的最小转弯半径确定转向摇臂在转向器上的中间位置。
3)、依据车型总布置,确定转向摇臂的偏距和长度。
4、转向传动轴及管柱的选型原则:1)、依据标杆车进行类比。
2)、依据点火开关和组合开关确定转向传动轴及管柱的形式。
3)、依据整车需要或成本考虑确定是否采纳双万向节结构,转向盘可调结构或缓冲吸能结构。
5、转向盘选型原则:1)、依据标杆车进行类比。
2)、依据总布置确定转向盘直径。
3)、依据整车需要或成本考虑,是否采纳防伤转向盘。
一、转向机部分一.设计目标L满意日本转向器样件的安装尺寸。
2.在结构上我们参考样件和恒隆公司现有的成熟产品的结构,确定为分体式结构。
3.产品性能达到或超过同类产品标准。
二.方案说明1.2.1扭杆与齿轮轴采纳花键联结方式,其优点:a.此结构采用花键过盈联结,省去了打销过程,简化了工艺。
b.增大了密封空间。
2.2齿条的支承型式齿条的一端通过常规的齿条支承座来支承,齿条支承座垫的材料选取的是含油聚甲醛,齿条的另一端通过缸端限位套总成来支承,在缸端限位套总成内含有聚甲醛材料的衬套,其主要优点是磨擦系数小,耐磨性好。
底盘转向拉杆系统设计计算

目录一、基本参数 0二、转向拉杆系统运动计算 0三、原地转向力的估算 (2)四、垂直跳动干涉计算 (4)五、小结 (5)一、基本参数汽车总重Ga 5400(Kg)前轴负荷Gf 2260 (Kg)轴距L 3300 (mm)前轮距 B 1750 (mm)最大外轮转角40º主销内倾角8º车轮外倾角1º主销后倾角2º轮胎气压P 670 (Kpa)轮胎静半径Rc 362(mm)二、转向拉杆系统运动计算1、有关参数布置方式见示意图1:图中:1—垂臂2—直拉杆3—车架上平面图1转向机速比ig= 17.76:1,许用总摆角90º,(±45º) 垂臂长度R p = 230mm 初始摆角向后6º 直拉杆臂长R S = 235.7 mm 2、计算结果⑴ 汽车最小转弯半径估算当内轮转角转到极限转角40º时,外轮相应转角为33º。
汽车的最小转弯半径可按最大外轮转角计算,即其中:C —轮胎偏置距 C = 98 mmR min = 6157.1≈6.2m由于在转弯行驶时,轮胎有偏离现象。
故实际转弯半径会C aLR +=sin min 9833sin 3300min +=︒R略有所增大。
通过实验验证汽车最小转弯半径约为6.7m ,满足了整车的要求。
⑵ 经计算拉杆机构传动比i d 右转极限位置 i d =1.538 中间位置 i d =1.048 左转极限位置 i d =0.866 转向系传动比 i=i g ×i d右转极限位置 i=17.76×1.538≈27.3 中间位置 i=17.76×1.048≈18.6 左转极限位置 i=17.76×0.866≈15.4⑶ 当车轮右转至极限位置时,相应的垂臂摆角向后 38.8º。
当车轮左转至极限位置时相应的垂臂摆角向前39.2º,垂臂的总摆角为78º,相应的方向盘总圈数3.8圈,转向左右对称。
电动汽车转向系统设计计算报告实例

EV 转向系统计算报告实例1 任务EV 是在传统车的基础上设计的一款全新车型,其转向系统是在样车转向系统为依托的前提下,根据总布置设计任务书而开发设计的电液泵助力转向系统。
1 转向系统设计的输入条件 1.1 整车基本参数2 转向系统的设计计算2.1 静态原地转向阻力矩静态原地转向阻力矩是汽车中最大极限转向所需力矩,比行驶中转向所需的力矩大2到3倍。
目前采用经验公式计算:pG fM r 313=①式中Mr ——在沥青或混凝土路面上的原地转向阻力矩,N ·mm ; f ——轮胎与地面间的滑动摩擦系数,一般取0.7;G 1——转向轴负荷,N ; P ——轮胎气压,MPa 。
前轴:G 1=989×9.8=9692N,P=0.20Mpa , f=0.7, 得:Mr=4.96×105 N ·mm 2.2 齿轮齿条式转向系的角传动比θcos 1r L i ow =2cos 2L r =θπ 式中 i ow ——齿轮齿条式转向系的角传动比; L 1——梯形臂长度,mm ;r ——主动小齿轮的节圆半径,mm ;θ——齿轮齿条的轴交角,°;L 2——转向盘转一周时齿条的行程,mm ;L 1=136.365mm θ=20° L 2=48.68mm 得:r=8.2mm i ow =17.592.3 静态原地转向时作用于转向盘的力αηsin R i M F ow rh =式中M r ——原地转向阻力矩,N ·mm ; F h ——作用于转向盘的力,N ; i ow ——转向系的角传动比; R ——转向盘半径,mm ;α——转向梯形底角,单位°; η——转向器的效率,取η=75%。
M r =5.8×105 N ·mm, i ow =17.59, R=380/2=190mm, η=75%, α= 89.938°得: F h =197.89N不带助力转向,汽车以10km/h 行驶时,作用在转向盘的手力不应超过245N ②,F h =197.89<245N ,所以满足法规要求。
转向系统设计计算匹配

1 转向系统的功能1.1 驾驶者通过方向盘控制转向轮绕主销的转角而实现控制汽车运动方向。
对方向盘的输入有两种方式:对方向盘的角度输入和对方向盘的力输入。
装有动力转向系统的汽车低速行驶时,操作方向盘的力很轻,却要产生很大的方向盘转角输入,汽车的运动方向纯粹是由转向系统各杆件的几何关系所确定。
这时,基本上是角输入。
而在高速行驶时,可能出现方向盘转角很小,汽车上仍作用有一定的侧向惯性力,这时,主要是通过力输入来操纵汽车。
1.2 将整车及轮胎的运动、受力状况反馈给驾驶者。
这种反馈,通常称为路感。
驾驶者可以通过手—---感知方向盘的震动及运转情况、眼睛—---观察汽车运动、身体—---承受到的惯性、耳朵—---听到轮胎在地面滚动的声音来感觉、检测汽车的运动状态,但最重要的的信息来自方向盘反馈给驾驶者的路感,因此良好的路感是优良的操稳性中不可缺少的部分。
反馈分为力反馈和角反馈从转向系统的功能可以得知:人、车通过转向系统组成了人车闭环系统,是驾驶者对汽车操纵控制的一个关键系统。
2 转向系统设计的基本要求转向系是用来保持或者改变汽车行驶方向的机构,在汽车转向行驶时,保证各转向轮之间有协调的转角关系。
转向系的基本要求如下:2.1 汽车转弯时,全部车轮应绕瞬时回转中心(瞬心)旋转,任何车轮不应有侧滑。
不满足这项要求会加剧轮胎磨损,并降低汽车的操作稳定性。
实际上,没有哪一款汽车能完全满足这项要求,只能对转向梯形杆系进行优化,一般在常用转向角内(内轮15°~25°范围)使转向内外轮运动关系逼近上述要求。
2.2 良好的回正性能汽车转向动作完成后,在驾驶者松开方向盘的条件下,转向轮能自动返回到直线行驶位置,并稳定行驶。
转向轮的回正力矩的大小主要由悬架系统所决定的前轮定位参数确定,一般来说,影响汽车回正的因素有:轮胎侧偏特性、主销内倾角、主销后倾角、前轮外倾、转向节上下球节的摩擦损失、转向节臂长、转向系统的逆效率等。
转向系统校核计算与设计指南
转向节臂计算力臂(mm) 转向垂臂计算力臂(mm) 原地阻力矩换算到当量杆上的阻力(N) 动力转向器输出到当量杆的拉力(N) 转向助力泵作用,方向盘的转动力(N) 转向助力泵失效,方向盘的转动力(N) 5.转向拉杆位于左极限位置状态 转向节臂计算力臂(mm) 转向垂臂计算力臂(mm) 原地阻力矩换算到当量杆上的阻力(N) 动力转向器输出到当量杆的拉力(N) 转向助力泵作用,方向盘的转动力(N) 转向助力泵失效,方向盘的转动力(N) 6.转向拉杆位于右极限位置状态 转向节臂计算力臂(mm) 转向垂臂计算力臂(mm) 原地阻力矩换算到当量杆上的阻力(N) 动力转向器输出到当量杆的拉力(N) 转向助力泵作用,方向盘的转动力(N) 转向助力泵失效,方向盘的转动力(N)
厦门金龙 技术中心 应青峰 2005.10.10 常用经验值,可以修改 计算结果,不能修改
转向垂臂长度(mm) 4.转向助力泵型号 工作流量(L/min) 最大工作压力(MPa) 公称排量n) 转向助力泵与发动机速比 5.贮油罐型号 总容积(L) 最大贮油量(L) 最大通过油量(L/min) 安全开启压力(MPa) 6.发动机型号 最高转速(r/min) 怠速(r/min) 7.转向拉杆规格 球头一总成型号 球头一球销直径(mm) 球销沿其中心摆角(°) 球头二总成型号 球头二球销直径(mm) 球销沿其中心摆角(°) 8.方向盘半径(mm) 9.悬架型式
设计结论:此K01旅游车型的动力转向系统匹配是比较成功 的,直接鉴借了原东风杭汽R13底盘的转向系统,并做了拉杆 加粗提高安全性能改进,优化了转向系统。由此表的右方数 据结果可得出:前悬架系统与转向拉杆系统的运动协调基本 上符合此车型的设计要求;动力转向系统的各总成件基本参 数是相互匹配的,并能比较优良的完成协调运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
G1=1070×9.8 P=230kPa 最后求得Mr=522429N.mm 即522.429N.m
作用在转向盘上的手力可用下式得出:
Fh=
其中:Fh——作用在转向盘上的手力,N;
iw——转向系角传动比;
R——转向盘半径;
η——转向系效率取0.75;
最后求得:Fh=148N(不带助力时转向力)根据法规GB17675-1999《汽车转向系基本要求》中的规定,不带助力转向时,按规定的转向作用在方向盘的手力应小于245N, <245N,因此方向盘的手力满足法规要求。
最后求得:i0ω=24.6(光洋转向优化前)
光洋:i0ω=25.5,恒隆:i0ω=24(转向优化后)
3.3转向系的力传动比计算
精确的计算出转向阻力矩是很困难的,目前常用经验公式如下:
Mr=
式中:Mr——在沥青或混凝土路面上的原地转向阻力矩;
f——轮胎与地面间的滑动摩擦系数,取0.7;
G1——转向轴负荷;
5参考文献∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙8
1.系统概述
本系统的设计计算依据来自K1项目中的CC6460K/CC6460KY的整车设计任务书。根据公司CC6460K/CC6460KY车型设计开发要求规定,本车型的转向系统在参考原车的基础上进行匹配设计开发。
2转向系统设计依据的整车参数计设计要求∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙2
3转向系统设计过程∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙2
本系统的设计计算适用于CC6460K/CC6460KY车型及其所延伸变化的其他K1系列车型。
根据整车设计任务书及总布置要求,转向梯形采用齿轮齿条拉杆式前置转向梯形机构,采用齿轮齿条式液压动力转向器,φ383四幅式转向盘,吸能式转向管柱及其它转向部件具体参考下图:
1.方向盘2.转向轴及万向节的力传动比计算∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙3
3.4转向系的内外轮转角∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙4
5.转向油罐6.整体式动力转向器
2.转向系统设计依据的整车参数及设计要求
整车型号
CC6460K
CC6460KY
驱动型式
4×2
4×4
轴距(mm)
2700
2700
轮距
前(mm)
1515
1515
后(mm)
1520
1520
质量参数
整备质量(kg)
1720
1830
前轴荷(kg)
890
980
后轴荷(kg)
830
850
满载质量(kg)
2195
2305
前轴荷(kg)
980
1070
后轴荷(kg)
1215
1235
载质量(kg)
475
475
车轮定位参数(空载)
前束(mm)
0~2
0~2
前轮外倾角(°)
0°±30′
0°±30′
主销后倾角(°)
3°30′±30′
3°30′±30′
主销内倾角(°)
12°30′±30′
12°30′±30′
3.5.2转向油泵压力的变化∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙6
4结论说明∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙7
3.5液压系统的匹配计算∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙5
3.5.1转向油泵流量的计算∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙5
内/外轮最大转角(°)
≥32°/28°
≥32°/28°
3.转向系统的设计过程
3.1最小转弯半径的计算
假设轮胎是刚性的,不考虑轮胎侧偏的影响,则有
Rmin=
——汽车内轮最大转角L——轴距
K——主销距r——车轮转臂
根据整车参数以及从数模中量取得实际数据取值如下:
=32°L=2700K=1484 r =146.8
代入公式Rmin=6549mm即最小转弯半径的理论为6.5m。
3.2转向系的角传动比计算
齿轮齿条式转向系的角传动比i0ω=L/rcosθ
其中L——梯形臂长度;
r——主动小齿轮的节圆半径;
θ——齿轮与齿条的轴交角;
其中L=146.8光洋:r =6.351恒隆:r =6.75θ=20°,θ=25°(优化后)
密级:版本/更改状态:第一版/0
编号:
长城汽车股份有限公司技术文件
CC6460K/KY
转向系统设计计算书
编制:
审核:
审定:
批准:
长城汽车股份有限公司
二OO四年四月十五日
1系统概述∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙1
3.1最小转弯半径计算∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙2
3.2转向系的角传动比计算∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙3