2018年浙江省大学生机器人竞赛规则:探险游寻宝游(1.0)
2018年浙江省青少年电子制作锦标赛竞赛规则

2018年浙江省青少年电子制作锦标赛竞赛规则第一部分总则(一)选手自带焊接(现场不提供交流电源,自备工具电压不高于9V)和制作工具、竞赛器材,现场不提供工具、零配件和耗材,选手之间不得相互借用和调剂;(二)选手在赛场做出有安全隐患的动作、存在不安全因素或者影响他人比赛,一经发现,视情节轻重取消比赛成绩或驱逐出赛场;请参赛选手自带阻燃桌垫,造成损坏需照价赔偿。
(三)选手自带全新(电子百拼除外)、未经处理的器材,可提前拆袋检查;携带样机、加工处理过的器材和仿冒器材进入赛场者,一经发现取消比赛成绩;(四)电动工具、半自动工具、制作使用的“模板”不允许使用;(五)所有焊接部分要求与“现场电子制作竞赛评判规定”一致;(六)举手报号以后再次触碰、修改作品的和未切断作品电源的都取消本次成绩;(七)主动或被动接受帮助者,取消两人成绩;(八)直接、间接触碰或帮助在赛道上比赛的机器,取消本轮成绩;(九)制作赛判为不合格的,不再参加下一轮竞赛;(十)模拟机器人、智能寻轨器、太空探测器和寻宝机器人行走赛比两轮,选最好成绩为该选手行走成绩。
两轮之间允许10秒内手提调试;(十一)更改或没有记号标志,取消成绩;比赛开始后不再做记号。
(十二)电路创新设计、遥控编码探雷比赛中严禁将通讯工具带入赛场,违者取消该选手所属队全部竞赛成绩。
(十三)选手如对裁判评判有异议的,应当场向裁判提出,并要求保留证据,并在成绩单上注明“申诉”。
否则赛后不予受理。
(十四)本规则的解释、补充、修改权属浙江省青少年电子制作锦标赛组委会。
第二部分电路创新制作一、项目描述(一)项目1(电路创新设计):根据组别用一套“百拼电子世界”在规定时间内,正确、快速地完成 4个(小学低段5个)现场指定电路的改造、创新及设计的实验,并显示电路的功能。
(二)项目2(现场电子制作):用“百拼电子世界”和2017年的焊接套材在规定时间内,正确、快速地完成现场指定2套焊接件的制作,并按图纸要求显示电路的功能。
浙江省大学生机器人竞赛_小型机器人足球赛技术挑战赛

浙江省大学生机器人竞赛小型机器人足球赛技术挑战赛·规则文档(一)比赛简介比赛使用与“小型机器人足球赛3V3对抗赛”相同的机器人和比赛系统平台,详细介绍请参见《小型机器人足球赛3V3对抗赛•规则文档》的第二部分“比赛平台与比赛场地介绍”。
在本比赛中,参赛队需要派遣机器人完成5个挑战项目,着重考察参赛同学的编程基础、算法能力及战术思维。
比赛总分为100分,根据得分进行比赛排名。
(二)技术挑战赛内容1、路径规划轮式机器人的导航一般分为路径规划,轨迹生成以及安全避障,路径规划通常是指对机器人当前所处的环境进行建模,从而规划出合理的路径,而轨迹生成则是基于机器人本身的条件限制实现对机器人规划轨迹的实施。
比赛测试方法是随机给定两点,机器人需要实现在这两个点之间来回进行跑位,且在中途能够有效地避免与障碍物的碰撞。
2、守门员策略考察参赛者守门员机器人的技巧。
参赛队的守门员机器人将面对一场机器人多车配合的频繁进攻,在指定的时间内,使己方的失球数尽量少。
3、定位球防守多名主场机器人会按照事先提供的多种进攻定位球策略对参赛队发起进攻。
参赛队需使用多名机器人组成防守阵型,并编写一套防守策略来应对这些定位球进攻,使己方的失球数最小。
4、匹配跑位足球场上有6 个机器人及若干目标点(大于或等于6),每个目标点都有相应的分值,参赛队单个机器人小车到达其中一个目标点可获得相应的分值(每个目标点只计一次分),在给定时间内获得分数最多者获胜。
5、最佳射门点足球比赛中无球队员的跑位是非常重要的,最佳射门点是指需要根据控球机器人当前的位置,对手站位等多方面因素决策出一个最容易得分的位置。
在本挑战项目中,参赛者需要控制两个机器人,一个负责传球,一个负责在最佳射门点进行射门。
比赛场景随机决定,计算10 个球的得分率(以传出球为准)。
(三)比赛计分方式1、路径规划本项目比赛时间为1 分钟,具体场景(各机器人位置及目标点)在比赛时公布。
第十八届全国大学生机器人大赛ROBOCON总决赛赛制
第十八届全国大学生机器人大赛ROBOCON
总决赛赛制
1. 总决赛分为初赛和复赛两个阶段。
2. 初赛
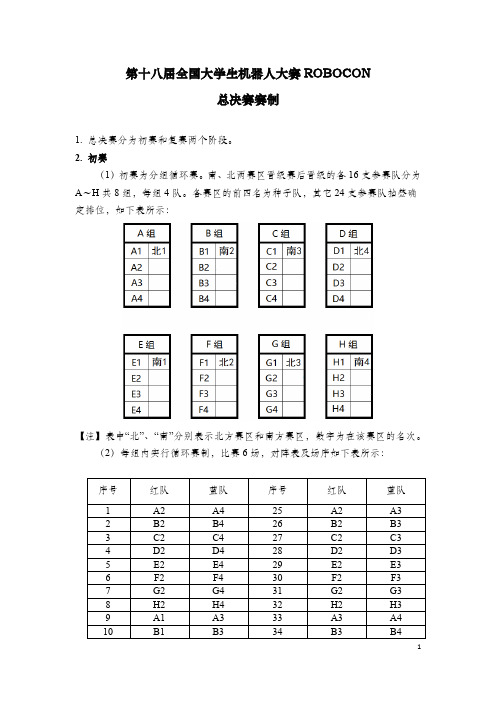
(1)初赛为分组循环赛。
南、北两赛区晋级赛后晋级的各16支参赛队分为A~H共8组,每组4队。
各赛区的前四名为种子队,其它24支参赛队抽签确定排位,如下表所示:
【注】表中“北”、“南”分别表示北方赛区和南方赛区,数字为在该赛区的名次。
(2)每组内实行循环赛制,比赛6场,对阵表及场序如下表所示:
(3)每场比赛在某一队实现“登顶”或开赛3分钟后立即结束。
(4)每场比赛获胜队积分为1;失利队积分为0;没有平局。
(5)初赛结束后按下顺序排队组内名次:
①先按积分排名,积分高的队在先;
②如果两队积分相同,则三场中实现“登顶”次数多的队排列在先;
③如果仍然持平,则三场总分高的队在先;
④如果仍然持平,则三场机器人总重轻的队在先。
(6)各组前两名晋级复赛。
4. 复赛
(1)复赛为淘汰赛。
淘汰赛采用三局两胜制,最先获得两局胜利的参赛队晋级。
(2)每场比赛在满足结束条件后立即结束。
(3)根据分组循环赛后的排名成绩,各组排名1、2位的参赛队出线,取得复赛的资格。
复赛按上图对阵,图中A1为A组第一名,A2为A组第二名,余
类推。
(4)对阵表中,红框中的参赛队为红队,蓝框中的参赛队为蓝队。
(5)颁奖仪式前的比赛为八进四、半决赛和决赛。
机器人采果实对抗赛规则-浙江大学

机器人多米诺骨牌对抗赛规则比赛主题:你玩过多米诺骨牌么?这是一项极具挑战和令人兴奋的设计类游戏。
但其繁琐的前期搭建工作却是一项耗时耗力的大工程。
不过现在好了!机器人将帮你完成整个工程前期的设计和搭建工作,你只需要在此之后轻轻推倒第一块骨牌,就可以尽情享受这一场视觉盛宴了!本项比赛要求参赛机器人携带足够的多米诺骨牌和一些其他道具于规定时间内结合赛前临时放置的5块多米诺骨牌完成整个多米诺骨牌工程的设计和搭建。
机器人工作完成后,双方队员同时推到各自离启动区最近的第一块关键牌,触发场上的“多米诺效应”。
裁判将根据各队机器人的搭建情况及最终效果对双方进行客观打分。
1.比赛场地图1 场地3D示意图图2 国际多米诺骨牌尺寸图图3 场地尺寸图(场地深度为50mm)⑤①②③④图4 蓝队半场俯视图(1)比赛场地为木制,内场地面涂有黑色亚光漆,其他表面涂白色亚光漆。
(a)场地分为蓝队半场和红队半场,涂有黑色亚光漆的内场地面用用宽度24mm±1mm的白色双面胶分成若干个方格,双面胶按水平、竖直地方向纵横交错粘贴在场地上,同一半场相邻纵向或横向的两条双面胶中心线之间距离约为40cm。
场地深度为50mm,具体尺寸见图3。
(b)场地周围有2cm厚的围墙,围墙和整个S型桌面高出黑色场地表面50mm,具体尺寸见图3。
(c)每个半场的桌面上事先放置了5块与此半场代队表颜色相同的多米诺骨牌,叫做“关键牌”,见图4。
图4对一个半场的关键牌进行了编号,1号和5号关键牌放在桌面长条区域的中心,离各自最近的桌沿1cm左右。
2~4号关键牌放置在白线的理论交叉线正上方的桌面上,且这3块牌的每一块牌在比赛开始前的状态有可能与示意图上标定的成90°放置。
每块国际标准多米诺骨牌的重量约为5克,尺寸见图2。
(2)比赛场地由“行走区”、“桌面”和“启动区”组成。
(a)“行走区”:场地黑色的地面为行走区,每队机器人只能在自己半场的行走区内活动。
浙江省大学生机器人竞赛_运输机器人对抗赛1.0规则

浙江省大学生机器人竞赛运输机器人对抗赛·规则文档1. 比赛任务简介场地上有很多货物——8个黄色的方砖(每个1分)和5个绿色的方砖(每个3分)。
红蓝两队的机器人将同时从本队的“START 区”出发,并在4分钟的比赛时间内,将场上的方砖运送到与本队颜色相同的“HOME 区”中。
比赛时间用尽时,结束比赛,并根据比赛结束瞬间各队“HOME 区”中方砖的数量计算比分。
但是,在比赛过程中,如果某队的“HOME 区中”同时出现至少3个绿色和3个黄色方砖时,那么比赛会立即结束,并且此队获得全场的方砖得分(23分)。
另外,每队的机器人在第一次启动时允许携带1个与本队颜色相同的方砖,称为“双倍砖”,在比赛过程中,机器人需要把自己的“双倍砖”放入本队的扇形“HOME 区”中(在场地中间的圆形转桌上),当比赛结束时,“双倍砖”在本队扇形“HOME 区”内的队伍,其得分将会翻倍。
2. 比赛场地运输机器人对抗赛比赛场地示意图比赛场地为木制,大小为4m ×3.2m ,周边有5cm 高、2cm 厚的围栏。
场地正中心放置了一个距离场地表面约20cm 高、外径64cm 的圆形转桌(桌面可在外力作用下旋转),圆形转桌厚4cm ,转桌下面的台柱高约16cm 、直径40cm 。
场地地面喷涂了黑色哑光漆,并用宽3cm 左右的白线划分成若干边长40cm 的正方形区域(以白线的中心线为测量标准)。
各队的START 区和HOME 区都张贴了代表本队颜色的深色哑光贴纸。
场地两侧的长条形HOME 区中间部分与场地黑色地面直接连通,但两侧的HOME 区域都有3cm 高、2cm 厚的围栏保护。
场地的围栏和圆桌的其他部分被喷涂成白色。
在“运输机器人对抗赛比赛场地示意图”中,所示的圆桌位置和方砖摆放位置为机器人比赛开始时的场上情况。
除了一块绿色方砖被放置在圆形转桌正中央外,其他方砖都被放置在示意图中白线交叉点的中心位置。
圆桌上扇形HOME 区的十字边线围栏与正下方的场地十字白线是对准的。
2018年创意机器人竞赛规则补充说明

2018年创意机器人竞赛规则补充说明
对2018年浙江省青少年电脑机器人竞赛创意机器人项目增加以下说明:
一、现场布展
布展时间为5月5日上午8:30-10:00.
(1)获得终评资格的参赛选手要为各自作品制作一块120厘米(高)、90厘米(宽,一律竖用)的作品展示板,供展示使用;
(2)各参赛机器人作品的投影面积不超过2平方米。
二、组装调试、现场问辩
在正式展示和问辩前,组委会安排一定时间段供参赛队布展、组装和调试作品。
5月5日-6日上午,将会有多位评委在不同时间前往展示场地现场问辩、评分,所有参赛选手务必在赛场等候,若发现缺席,将影响参赛者成绩。
2018年浙江省大学生程序设计竞赛试题
The 15th Zhejiang Provincial Collegiate Programming ContestSponsored byContest SectionApril 29, 2018Problem ListThis problem set should contain 13 (thirteen) problems on 17 (seventeen) numbered pages. Please inform a runner immediately if something is missing from your problem set.Prepared by Zhejiang University ACM/ICPC Problem Setter Team.Problem A.PeakDescriptionA sequence of n integers a1,a2,...,a n is called a peak,if and only if there exists exactly one integer k such that1<k<n,and a i<a i+1for all1≤i<k,and a i−1>a i for all k<i≤n.Given an integer sequence,please tell us if it’s a peak or not.InputThere are multiple test cases.Thefirst line of the input contains an integer T,indicating the number of test cases.For each test case:Thefirst line contains an integer n(3≤n≤105),indicating the length of the sequence.The second line contains n integers a1,a2,...,a n(1≤a i≤2×109),indicating the integer sequence. It’s guaranteed that the sum of n in all test cases won’t exceed106.OutputFor each test case output one line.If the given integer sequence is a peak,output“Yes”(without quotes), otherwise output“No”(without quotes).Examplestandard input standard output7515732 512121 41234 44321 31213212512312Yes No No No Yes No NoProblem B.King of KaraokeDescriptionIt’s Karaoke time!DreamGrid is performing the song Powder Snow in the game King of Karaoke.The song performed by DreamGrid can be considered as an integer sequence D1,D2,...,D n,and the standard version of the song can be considered as another integer sequence S1,S2,...,S n.The score is the number of integers i satisfying1≤i≤n and S i=D i.As a good tuner,DreamGrid can choose an integer K(can be positive,0,or negative)as his tune and add K to every element in D.Can you help him maximize his score by choosing a proper tune? InputThere are multiple test cases.Thefirst line of the input contains an integer T(about100),indicating the number of test cases.For each test case:Thefirst line contains one integer n(1≤n≤105),indicating the length of the sequences D and S. The second line contains n integers D1,D2,...,D n(−105≤D i≤105),indicating the song performed byDreamGrid.The third line contains n integers S1,S2,...,S n(−105≤S i≤105),indicating the standard version of the song.It’s guaranteed that at most5test cases have n>100.OutputFor each test case output one line containing one integer,indicating the maximum possible score. Examplestandard input standard output24123423465-5-4-3-2-1 543213 1NoteFor thefirst sample test case,DreamGrid can choose K=1and changes D to{2,3,4,5}.For the second sample test case,no matter which K DreamGrid chooses,he can only get at most1match.Problem C.Magic12MonthsDescriptionIt’s New Year’s Eve,and it’s also the best time of the year to play the card game Magic12Months to pray for good luck of the coming year.BaoBao has just found a deck of standard52playing cards(without Jokers)in his pocket and decides to play the game.The rules are as follows:1.Setup1.1.Remove the four‘K’s from the52cards.1.2.Shuffle the remaining48cards and divide them face down into12piles(4cards per pile)withequal probability.2.Gameplay2.1.Let p=1.2.2.Flip the card on the top of the p-th pile,check its rank r,and discard the card.2.3.If r is a number,let p=r;If r=‘A’,let p=1;If r=‘J’,let p=11;If r=‘Q’,let p=12.2.4.If the p-th pile is empty,the game ends;Otherwise go back to step2.2.When the game ends,having all the4cards of rank mflipped and discarded indicates that the m-th month in the coming year is a lucky month.BaoBao is in the middle of the game and has discarded n cards.He wants to know the probability that the i-th month of the coming year is a lucky month for all1≤i≤12when the game ends.Given these n cards,please help him calculate the answer.InputThere are multiple test cases.Thefirst line of input contains an integer T(about100)–the number of test cases.For each test case:Thefirst and only line contains an integer n(0≤n≤48)–the number offlipped cards,followed by the rank of the n cards r1,r2,...,r n(r i∈{A,2,3,4,5,6,7,8,9,10,J,Q})separated by a space in the order they areflipped.It’s guaranteed that the input describes a valid and possible situation of the game.OutputFor each test case output one line containing12numbers separated by a space,where the i-th number indicates the probability that the i-th month of the coming year is a lucky month.You should output a probability in its simplest fraction form A/B where A and B are coprime.Specifically, if the probability equals0,you should output0;If the probability equals1,you should output1. Please,DO NOT output extra spaces at the end of each line,or your answer may be considered incorrect! Examplestandard input3309Q10J Q10J10J J85765767663A24A2424472A3A4A Astandard output12/32/511/212/32/52/52/311/211/21/21/21/21/21/21/21/21/21/21/2100000000000Problem D.Sequence SwappingDescriptionBaoBao has just found a strange sequence{<s1,v1>,<s2,v2>,...,<s n,v n>}of length n in his pocket. As you can see,each element<s i,v i>in the sequence is an ordered pair,where thefirst element s i in the pair is the left parenthesis‘(’or the right parenthesis‘)’,and the second element v i in the pair is an integer.As BaoBao is bored,he decides to play with the sequence.At the beginning,BaoBao’s score is set to 0.Each time BaoBao can select an integer k,swap the k-th element and the(k+1)-th element in the sequence,and increase his score by(v k×v k+1),if and only if1≤k<n,s k=‘(’and s k+1=‘)’. BaoBao is allowed to perform the swapping any number of times(including zero times).What’s the maximum possible score BaoBao can get?InputThere are multiple test cases.Thefirst line of the input contains an integer T,indicating the number of test cases.For each test case:Thefirst line contains an integer n(1≤n≤103),indicating the length of the sequence.The second line contains a string s(|s|=n)consisting of‘(’and‘)’.The i-th character in the string indicates s i,of which the meaning is described above.The third line contains n integers v1,v2,...,v n(−103≤v i≤103).Their meanings are described above. It’s guaranteed that the sum of n of all test cases will not exceed104.OutputFor each test case output one line containing one integer,indicating the maximum possible score BaoBao can get.Examplestandard input standard output46)())()135-132 6)())()135-10032 3())1-1-13())-1-1-124 21 0 2NoteFor thefirst sample test case,the optimal strategy is to select k=2,3,5,4in order. For the second sample test case,the optimal strategy is to select k=2,5in order.Problem E.LISDescriptionDreamGrid is learning the LIS(Longest Increasing Subsequence)problem and he needs tofind the longest increasing subsequence of a given sequence a1,a2,...,a n of length n.Recall that•A subsequence b1,b2,...,b m of length m is a sequence satisfying b1=a k1,b2=a k2,...,b m=a kmand1≤k1<k2<···<k m≤n.•An increasing subsequence b1,b2,...,b m is a subsequence satisfying b1<b2<···<b m. DreamGrid defines the helper sequence f1,f2,...,f n where f i indicates the maximum length of the increasing subsequence which ends with a i.In case you don’t know how to derive the helper sequence,he provides you with the following pseudo-code which calculates the helper sequence.procedure lis_helper(a:original sequence){Let n be the length of the original sequence,f(i)be the i-th element in sequence f,and a(i)be the i-th element in sequence a}for i:=1to nf(i):=1for j:=1to(i–1)if a(j)<a(i)and f(j)+1>f(i)f(i):=f(j)+1return f{f is the helper sequence}DreamGrid has derived the helper sequence using the program,but the original sequence a1,a2,...,a n is stolen by BaoBao and is lost!All DreamGrid has in hand now is the helper sequence and two range sequences l1,l2,...,l n and r1,r2,...,r n indicating that l i≤a i≤r i for all1≤i≤n.Please help DreamGrid restore the original sequence which is compatible with the helper sequence and the two range sequences.InputThere are multiple test cases.Thefirst line of the input contains an integer T,indicating the number of test cases.For each test case:Thefirst line contains an integer n(1≤n≤105),indicating the length of the original sequence.The second line contains n integers f1,f2,...,f n(1≤f i≤n)seperated by a space,indicating the helper sequence.For the following n lines,the i-th line contains two integers l i and r i(0≤l i≤r i≤2×109),indicating the range sequences.It’s guaranteed that the original sequence exists,and the sum of n of all test cases will not exceed5×105. OutputFor each test case output one line containing n integers separated by a space,indicating the original sequence.If there are multiple valid answers,print any of them.Please,DO NOT print extra spaces at the end of each line,or your solution may be considered incorrect!Examplestandard input standard output46123243 052433123515512131 100200 200300 200400 400500 10050071231142 030303030303032111223123253 200300200500200 012003122Problem F.Now Loading!!!DescriptionDreamGrid has n integers a1,a2,...,a n.DreamGrid also has m queries,and each time he would like toknow the value of∑1≤i≤n ⌊ai⌈log p a i⌉⌋for a given number p,where⌊x⌋=max{y∈Z|y≤x},⌈x⌉=min{y∈Z|y≥x}.InputThere are multiple test cases.Thefirst line of input is an integer T indicating the number of test cases. For each test case:Thefirst line contains two integers n and m(1≤n,m≤5×105)–the number of integers and the number of queries.The second line contains n integers a1,a2,...,a n(2≤a i≤109).The third line contains m integers p1,p2,...,p m(2≤p i≤109).It is guaranteed that neither the sum of all n nor the sum of all m exceeds2×106.OutputFor each test case,output an integer(m ∑i=1i·z i)mod109,where z i is the answer for the i-th query. Examplestandard input standard output232 100100010000 1001045 2323223123123 123232423511366 45619Problem G.JUMPin’JUMP UP!!!DescriptionTired of solving mathematical equations,DreamGrid starts to solve equations related to strings:for two strings x and y with the same length consisting of lowercase English letters,calculate f(x,y,n),which is defined as the number of nonempty strings z consisting of lowercase English letters such that xz=zy and the length of z does not exceed n.DreamGrid has two strings s=s1s2...s n and t=t1t2...t m.He would like to ask several questions about the value of f(t,s[x..(x+m−1)],y),where s[x..(x+m−1)]is the substring of s starting from s x with length m and y is a given number.InputThere are multiple test cases.Thefirst line of input contains an integer T,indicating the number of test cases.For each test case:Thefirst line contains three integers n and m and q(1≤n,m,q≤105,m≤n)–the length of s,the length of t and the number of questions.The second line contains n lowercase English letters denoting the string s.The third line contains m lowercase English letters denoting the string t.Each of the next q lines contains two integers x i and y i(1≤x i≤n+1−m,1≤y i≤1018)denoting the i-th question.It is guaranteed that neither the sum of all n nor the sum of all q exceeds106.OutputFor each question,output an integer denoting the answer.Examplestandard input standard output1 423 abcd ba12 22 321 0 0Problem H.Game on a TreeDescriptionBaoBao is playing a game on a rooted tree with n vertices and(n−1)weighted edges.At the beginning of the game,a chess piece is placed on the root of the tree,which is vertex1.In each step,BaoBao can perform one of the four operations:1.Move the chess piece along an edge from its current vertex to a child vertex.This operation willcost BaoBao w units of value,where w is the weight of the edge.2.Jump the chess piece back to vertex1.This operation is free and won’t cost BaoBao any unit ofvalue.3.Set a“save point”on the current vertex of the chess piece.If a save point has been set on someother vertex before,the save point on the old vertex will be removed(so there will be at most one save point on the tree at the same time).This operation is free and won’t cost BaoBao any unit of value.4.Jump the chess piece back to the save point(the save point must be set before this operation).Thisoperation is free and won’t cost BaoBao any unit of value.The goal of the game is to visit every leaf vertex of the tree using the chess piece.Please help BaoBao calculate the minimum units of value he has to spend to achieve the goal.Recall that a leaf vertex of a tree is a vertex with no child.InputThere are multiple test cases.Thefirst line of the input contains an integer T,indicating the number of test cases.For each test case:Thefirst line contains one integer n(2≤n≤200),indicating the size of the tree.The following(n−1)lines each contains three integers u i,v i and w i(1≤u i,v i≤n,1≤w i≤109), indicating an edge connecting vertex u i and vertex v i with weight w i in the tree.It’s guaranteed that the given graph is a tree,and the sum of n over all test cases will not exceed2000. OutputFor each test case output one line containing one integer,indicating the minimum units of value BaoBao has to spend to achieve the goal.Example standardinputstandard output 381213112425426223738338121231341351261671681812100231341351261671681148107NoteThe trees of the sample test cases are shown above.For the first sample test case,BaoBao should perform the following operations:go to 2,save on 2,go to 4,go to 5,back to save (2),go to 6,back to root (1),go to 3,save on 3,go to 7,back to save (3),go to 8.For the second sample test case,BaoBao should perform the following operations:go to 2,go to 3,save on 3,go to 4,back to save (3),go to 5,back to root (1),go to 2,go to 6,save on 6,go to 7,back to save(7),go to 8.For the third sample test case,BaoBao should perform the following operations:go to 2,save on 2,go to 3,go to 4,back to save (2),go to 3,go to 5,back to save (2),go to 6,save on 6,go to 7,back to save (6),go to 8.Problem I.Magic PointsDescriptionGiven an integer n ,we say a point (x,y )on a 2D plane is a magic point,if and only if both x and y are integers,and exactly one of the following conditions is satisfied:•0≤x <n and y =0;•0≤x <n and y =n −1;•x =0and 0≤y <n ;•x =n −1and 0≤y <n .It’s easy to discover that there are 4n −4magic points in total.These magic points are numbered from 0to 4n −5in counter-clockwise order starting from (0,0).DreamGrid can create n magic lines from these magic points.Each magic line passes through exactly two magic points but cannot be parallel to the line x =0or y =0(that is to say,the coordinate axes).The intersections of the magic lines are called dream points,and for some reason,DreamGrid would like to make as many dream points as possible.Can you tell him how to create these magic lines?InputThere are multiple test cases.The first line of input contains an integer T (about 100),indicating the number of test cases.For each test case,there is only one integer n (2≤n ≤1000).OutputFor each case output 2n integers p 1,p 2,...,p 2n in one line separated by one space,indicating that in your answer,point p 2k −1and point p 2k is connected by a line for all 1≤k ≤n .If there are multiple answers,you can print any of them.Example standard inputstandard output32340213142536061938410NoteThe sample test cases are shown as follow:Problem J.CONTINUE...?DescriptionDreamGrid has n classmates numbered from1to n.Some of them are boys and the others are girls.Each classmate has some gems,and more specifically,the i-th classmate has i gems.DreamGrid would like to divide the classmates into four groups G1,G2,G3and G4such that:•Each classmate belongs to exactly one group.•Both G1and G2consist only of girls.Both G3and G4consist only of boys.•The total number of gems in G1and G3is equal to the total number of gems in G2and G4.Your task is to help DreamGrid group his classmates so that the above conditions are satisfied.Note that you are allowed to leave some groups empty.InputThere are multiple test cases.Thefirst line of input is an integer T indicating the number of test cases. For each test case:Thefirst line contains an integer n(1≤n≤105)–the number of classmates.The second line contains a string s(|s|=n)consisting of0and1.Let s i be the i-th character in the string s.If s i=1,the i-th classmate is a boy;If s i=0,the i-th classmate is a girl.It is guaranteed that the sum of all n does not exceed106.OutputFor each test case,output a string consists only of{1,2,3,4}.The i-th character in the string denotes the group which the i-th classmate belongs to.If there are multiple valid answers,you can print any of them;If there is no valid answer,output“-1”(without quotes)instead.Examplestandard input standard output5112103101400007 1101001-1-1314 1221 3413214Problem K.Mahjong SortingDescriptionDreamGrid has just found a set of Mahjong with3M suited tiles and a White Dragon tile in his pocket. Each suited tile has a suit(Character,Bamboo or Dot)and a rank(ranging from1to M),and there is exactly one tile of each rank and suit combination.Character tiles whose rank ranges from1to9Bamboo tiles whose rank ranges from1to9Dot tiles whose rank ranges from1to9White Dragon tileAs DreamGrid is bored,he decides to play with these tiles.Hefirst selects one of the3M suited tiles as the“lucky tile”,then he picks N tiles from the set of(3M+1)tiles and sorts these N tiles with the following rules:•The“lucky tile”,if contained in the N tiles,must be placed in the leftmost position.•For two tiles A and B such that neither of them is the“lucky tile”,if–A is a Character tile and B is a Bamboo tile,or–A is a Character tile and B is a Dot tile,or–A is a Bamboo tile and B is a Dot tile,or–A and B have the same suit and the rank of A is smaller than the rank of B, then A must be placed to the left of B.White Dragon tile is a special tile.If it’s contained in the N tiles,it’s considered as the original(not-lucky)version of the lucky tile during the sorting.For example,consider the following sorted tiles,where “3Character”is selected as the lucky tile.White Dragon tile,in this case,is considered to be the original not-lucky version of“3Character”and should be placed between“2Character”and“4Character”.As DreamGrid is quite forgetful,he immediately forgets what the lucky tile is after the sorting!Given N sorted tiles,please tell DreamGrid the number of possible lucky tiles.InputThere are multiple test cases.Thefirst line of the input contains an integer T,indicating the number of test cases.For each test case:Thefirst line contains two integers N and M(1≤N,M≤105,N≤3M+1),indicating the number of sorted tiles and the maximum rank of suited tiles.For the next N lines,the i-th line describes the i-th sorted tile counting from left to right.The line begins with a capital letter s i(s i∈{C,B,D,W}),indicating the suit of the i-th tile:•If s i=C,then an integer r i(1≤r i≤M)follows,indicating that it’s a Character tile with rank r i;•If s i=B,then an integer r i(1≤r i≤M)follows,indicating that it’s a Bamboo tile with rank r i;•If s i=D,then an integer r i(1≤r i≤M)follows,indicating that it’s a Dot tile with rank r i;•If s i=W,then it’s a White Drangon tile.It’s guaranteed that there exists at least one possible lucky tile,and the sum of N in all test cases doesn’t exceed106.OutputFor each test case output one line containing one integer,indicating the number of possible lucky tiles. Examplestandard input standard output439 C2 WC4 69 C2 C7 WB3 B4 D2 3100 C2 WC9 39 C1 B2 D32 4 7 25NoteFor thefirst sample,“2Character”and“3Character”are possible lucky tiles.For the second sample,“8Character”,“9Character”,“1Bamboo”and“2Bamboo”are possible lucky tiles.Problem L.Doki Doki Literature ClubDescriptionDoki Doki Literature Club!is a visual novel developed by Team Salvato.The protagonist is invited by his childhood friend,Sayori,to join their high school’s literature club.The protagonist then meets the other members of the club:Natsuki,Yuri,and the club president Monika.The protagonist starts to participate in the club’s activities such as writing and sharing poetry,and grows close to the four girls.What a lovely story!A very important feature of the game is its poetry writing mechanism.The player is given a list of various words to select from that will make up his poem.Each girl in the Literature Club has different word preferences,and will be very happy if the player’s poem is full of her favorite words.The poem writing mini-game(from wikipedia)BaoBao is a big fan of the game and likes Sayori the most,so he decides to write a poem to please Sayori.A poem of m words s1,s2,...,s m is nothing more than a sequence of m strings,and the happiness of Sayori after reading the poem is calculated by the formulaH=m∑i=1(m−i+1)·f(s i)where H is the happiness and f(s i)is Sayori’s preference to the word s i.Given a list of n words and Sayori’s preference to each word,please help BaoBao select m words from the list andfinish the poem with these m words to maximize the happiness of Sayori.Please note that each word can be used at most once!InputThere are multiple test cases.Thefirst line of input contains an integer T(about100),indicating the number of test cases.For each test case:Thefirst line contains two integers n and m(1≤m≤n≤100),indicating the number of words and the length of the poem.For the following n lines,the i-th line contains a string consisting of lowercased English letters w i (1≤|w i|≤15)and an integer f(w i)(−109≤f(w i)≤109),indicating the i-th word and Sayori’s preference to this word.It’s guaranteed that w i=w j for all i=j.OutputFor each test case output one line containing an integer H and m strings s1,s2,...,s m separated by one space,indicating the maximum possible happiness and the corresponding poem.If there are multiple poems which can achieve the maximum happiness,print the lexicographically smallest one.Please,DO NOT output extra spaces at the end of each line,or your answer may be considered incorrect!A sequence of m strings a1,a2,...,a m is lexicographically smaller than another sequence of m strings b1,b2,...,b m,if there exists a k(1≤k≤m)such that a i=b i for all1≤i<k and a k is lexicographically smaller than b k.A string s1=a1a2...a x is lexicographically smaller than another string s2=b1b2...b y,if there exists a k(1≤k≤min(x,y))such that a i=b i for all1≤i<k and a k<b k,or a i=b i for all1≤i≤min(x,y) and x<y.Examplestandard input standard output4108hello0world0 behind0far1be2spring10can15comes20 winter25if20055collegiate0 programming-5 zhejiang10 provincial5 contest-4532bcda1bcd1bbbbb132a1aa1aaa12018if winter comes can spring be far behind15zhejiang provincial collegiate programming contest 3bbbbb bcd3a aaProblem M.Lucky7DescriptionBaoBao has just found a positive integer sequence a1,a2,...,a n of length n from his left pocket and another positive integer b from his right pocket.As number7is BaoBao’s favorite number,he considers a positive integer x lucky if x is divisible by7.He now wants to select an integer a k from the sequence such that(a k+b)is lucky.Please tell him if it is possible.InputThere are multiple test cases.Thefirst line of the input is an integer T(about100),indicating the number of test cases.For each test case:Thefirst line contains two integers n and b(1≤n,b≤100),indicating the length of the sequence and the positive integer in BaoBao’s right pocket.The second line contains n positive integers a1,a2,...,a n(1≤a i≤100),indicating the sequence. OutputFor each test case output one line.If there exists an integer a k such that a k∈{a1,a2,...,a n}and(a k+b) is lucky,output“Yes”(without quotes),otherwise output“No”(without quotes).Examplestandard input standard output4374563747652 25252 426 100124No Yes Yes YesNoteFor thefirst sample test case,as4+7=11,5+7=12and6+7=13are all not divisible by7,the answer is“No”.For the second sample test case,BaoBao can select a7from the sequence to get7+7=14.As14is divisible by7,the answer is“Yes”.For the third sample test case,BaoBao can select a5from the sequence to get5+2=7.As7is divisible by7,the answer is“Yes”.For the fourth sample test case,BaoBao can select a100from the sequence to get100+26=126.As 126is divisible by7,the answer is“Yes”.。
2018年浙江奇迹创意电子创新规则

2018年浙江省青少年电子制作锦标赛竞赛规则第一部分总则(一)选手自带焊接(现场不提供交流电源,自备工具电压不高于9V)和制作工具、竞赛器材,现场不提供工具、零配件和耗材,选手之间不得相互借用和调剂;(二)选手在赛场做出有安全隐患的动作、存在不安全因素或者影响他人比赛,一经发现,视情节轻重取消比赛成绩或驱逐出赛场;请参赛选手自带阻燃桌垫,造成损坏需照价赔偿。
(三)选手自带全新(电子百拼除外)、未经处理的器材,可提前拆袋检查;携带样机、加工处理过的器材和仿冒器材进入赛场者,一经发现取消比赛成绩;(四)电动工具、半自动工具、制作使用的“模板”不允许使用;(五)所有焊接部分要求与“现场电子制作竞赛评判规定”一致;(六)举手报号以后再次触碰、修改作品的和未切断作品电源的都取消本次成绩;(七)主动或被动接受帮助者,取消两人成绩;(八)直接、间接触碰或帮助在赛道上比赛的机器,取消本轮成绩;(九)制作赛判为不合格的,不再参加下一轮竞赛;(十)模拟机器人、智能寻轨器、太空探测器和寻宝机器人行走赛比两轮,选最好成绩为该选手行走成绩。
两轮之间允许10秒内手提调试;(十一)更改或没有记号标志,取消成绩;比赛开始后不再做记号。
(十二)电路创新设计、遥控编码探雷比赛中严禁将通讯工具带入赛场,违者取消该选手所属队全部竞赛成绩。
(十三)选手如对裁判评判有异议的,应当场向裁判提出,并要求保留证据,并在成绩单上注明“申诉”。
否则赛后不予受理。
(十四)本规则的解释、补充、修改权属浙江省青少年电子制作锦标赛组委会。
第二部分电路创新制作一、项目描述(一)项目1(电路创新设计):根据组别用一套“百拼电子世界”在规定时间内,正确、快速地完成 4个(小学低段5个)现场指定电路的改造、创新及设计的实验,并显示电路的功能。
(二)项目2(现场电子制作):用“百拼电子世界”和2017年的焊接套材在规定时间内,正确、快速地完成现场指定2套焊接件的制作,并按图纸要求显示电路的功能。
机器人工程挑战赛海洋探险竞赛规则
附件3:机器人工程挑战赛—海洋探险竞赛规则一、任务机器人工程挑战赛—海洋探险(简称机器人海洋探险),是一个模拟机器人海洋探险的过程,旨在通过这一活动激发青少年对海洋的兴趣,引发他们对海洋资源及地球有限资源的保护意识。
在这项竞赛中,除了学生要掌握机器人编程和制作,也要考虑如何面对一个多任务的项目,在有限的时间内得到最好的成绩,在过程中培养团队合作、对工程技术的认识以及对社会、环境及与人的关系的思考。
机器人海洋探险要求一个机器人在2.5分钟完成9项机器人挑战任务,如部署潜水艇、标记失事船只、保护泵站、维修输油管道、标记特殊样本、解救海豚、建造人造礁石、清理货船事故、打捞古代宝藏等。
每个任务都有相应的分数,任务的完成没有先后的规定,完成任务越多,分数越高。
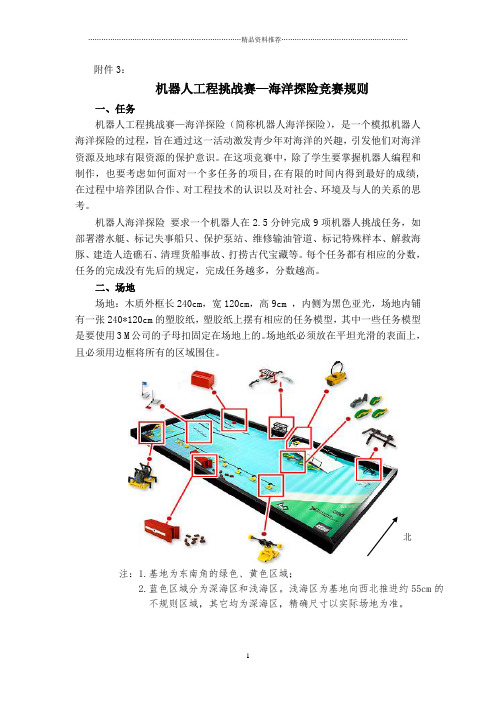
二、场地场地:木质外框长240cm,宽120cm,高9cm ,内侧为黑色亚光,场地内铺有一张240*120cm的塑胶纸,塑胶纸上摆有相应的任务模型,其中一些任务模型是要使用3 M公司的子母扣固定在场地上的。
场地纸必须放在平坦光滑的表面上,且必须用边框将所有的区域围住。
北注:1.基地为东南角的绿色、黄色区域;2.蓝色区域分为深海区和浅海区。
浅海区为基地向西北推进约55cm的不规则区域,其它均为深海区,精确尺寸以实际场地为准。
三、任务说明及得分部署潜水艇机器人必须完全登上考察船,然后将潜水艇放入海里。
潜水艇必须接触场地上的蓝色区域。
40分:潜水艇是正面朝上;35分:潜水艇不是正面朝上。
标记失事船只为了显示出古代失事船只的位置,机器人必须将船只失事水域的旗帜竖起来。
75分:3列旗帜全部竖起;45分:从东到西任意1列旗帜完全被竖起;30分:任意数量(任意颜色)的旗子被竖起来;保护泵站40分:机器人必须将保护建筑盖到泵站上去,保护建筑至少有一只脚完全的越过泵站南边的墙壁,且保护建筑不能有任何部分越过黑色边框。
维修输油管道40分:机器人必须先将输油管道中间尚未连通的一段安装到位。
2018中国机器人大赛比赛规则

2018中国机器人大赛比赛规则空中机器人项目无人机大战水果项目2018中国机器人大赛空中机器人项目技术委员会2018年5月31日目录一、项目简介 (2)二、技术委员会 (3)三、赛项说明 (4)四、比赛场地及器材 (5)五、机器人要求 (6)六、评分标准 (6)七、赛程赛制 (7)一、项目简介近年来,空中机器人技术在各行各业的应用日益广泛,特别是民用无人机出现井喷式的发展,在航拍测绘、电力管线巡检、物流与农业植保等方面显示了强烈的需求预期。
随着需求的日益聚焦,多旋翼无人机技术和VTOL技术日益成熟,已经发展出了规模庞大的爱好者团体和诸多新兴的民用无人机技术公司。
为此,设置空中机器人比赛项目,引导青年学生发明新的技术,实践新的方法,交流和检验空中机器人创新成果,成为中国机器人大赛的迫切需要。
中国机器人大赛空中机器人比赛将根据无人机技术的热点和趋势,不断推出和调整比赛项目,为培养人才,推动产业发展提供一个交流和竞技的平台。
2018年空中机器人比赛设立的第一个项目将围绕多旋翼飞行机器人如何近距离的处理“目标”和“危险”物体展开。
比赛规则类似“水果忍者”平板电脑游戏,由气球模拟的“水果”从场地中央飘落,“水果”中还会夹杂“炸弹”,空中机器人要做出判断,哪些“水果”可以切,哪些是“炸弹”有危险!比赛对空中机器人的稳定性、机动性、快速定位识别球体能力提出了持续的挑战。
比赛的初期阶段在室内进行,在未来最高级的比赛中,空中机器人将能够接住人类抛来的气排球,并且以合适的角度弹回去。
比赛以研发人类的“飞行机器人伙伴”为终极目标,逐步涉及空中机器人与人类近距离接触时的结构、控制、定位、识别、规划和人机交互等前沿问题。
在2018年的比赛规则中,主要技术难点为:(1)自主研发、搭建参赛的空中机器人,采用先进的传感系统和控制系统;(2)在无GPS条件下,如何保持稳定的飞行高度和原地悬停;(3)如何识别空中的球体,确定目标和飞行器的相对位置并做出机动;(4)如何区别不同颜色的球体,并做出规避或者迎击的行为决策。
第十七届全国大学生机器人大赛RoboMaster2018机甲大师赛比赛规则手册V1.0.pdf
RoboMast9 V 1.0
RoboMaster组委会保留对本规则手册进行修改和最终解释的权利 RoboMaster组委会编制 0
修改日志
日期 2017.09.26
版本 1.0
改动记录 首次发布
1
目录
组织机构 ...................................................................................................................................................................................... 5 前言............................................................................................................................................................................................... 6 宗旨............................................................................................................................................................................................... 7 第 1 章 赛事介绍 ....................................................................................................................................................................... 8
【附件5】机器人游中国比赛规则
附件5:机器人游中国比赛规则一、总体介绍二、场地与环境三、旅游景点四、参赛队、教练五、比赛程序六、赛前准备工作七、旅游竞赛的计时计分八、资格审查及表演竞赛计分九、其他附件5-1、景点分值表附件5-2、本次机器人游中国比赛路线图一、总体介绍1、竞赛目的“机器人游中国”竞赛项目要求参赛机器人在规定时间内,游历尽量多的景点,获得尽量多的得分,并在时间结束前回到出发地。
目的是引导参赛队研究、设计并制作具有优秀硬件与软件系统的移动机器人,逐步提高机器人的能力与智能,如:a、系统规划与优化能力:在预定的时间内游历尽量多的景点,完成计划中的旅游活动,并回到出发地点。
是一种最优规划活动;有一定的系统规划与优化能力。
想得高分,就要游历尽量多的景点和难度高的景点,但存在来不及在规定的假期内回家的危险。
每一轮比赛中走两次,使得第一次旅游探路,其后进行自动路径优化成为可能。
b、应变能力:有些可移动景点与路障的摆放数量与位置,在机器人放进出发区后,随机确定。
这在一定程度上可控制竞赛的难度,并使旅游路线有一定的不确定性。
未来,路线图也可以在赛前临时公布。
c、视力:考验机器人辨别形状和色彩的能力,引导机器人视觉能力的提高。
d、爬坡能力e、跨越门槛的能力f、快速性与稳定性机器人在的整个旅游过程中,始终要在快速性与稳定性中间求得平衡,否则,难以取得好的成绩。
2、机器人由于双足型机器人目前尚无法适应本比赛项目如此复杂的场地,本项目暂时不设双足类型。
机器人应该有便于裁判操作的启动与停止按钮。
a、机器人:外观与尺寸无具体限制,能适应旅游场地即可。
通常为四轮式。
b、传感器:在不违反规则和规范的情况下,对机器人传感器的类型和数量没有限制。
c、动力:请在每组比赛点名前为机器人充足电力。
在本组全部机器人完成比赛之前,不得充电。
d、其他:机器人不得伤害人、不应对场地等造成损坏。
二、场地、路线、环境1、场地比赛场地7m×10m,表面铺绿色地毯。
2018年第五届浙江省大学生工程训练综合能力竞赛暨第六届

2018年第五届浙江省大学生工程训练综合能力竞赛暨第六届全国大学生工程训练综合能力竞赛预赛的通知(第二轮)浙科竞〔2018〕21号各高校:为了推动高等教育内涵式发展,促进大学生工程实践和创新能力的提升,促进浙江省高校创客教育工作,根据教育部《关于开展全国大学生工程训练综合能力竞赛的通知》(教高司函﹝2009)78号)和省教育厅《关于公布2018年浙江省大学生科技竞赛赛项的通知》文件要求,经研究,定于2018年11月30日-12月2日在杭州电子科技大学(下沙)举行2018年第五届浙江省大学生工程训练综合能力竞赛暨第六届全国大学生工程训练综合能力竞赛预赛,第一轮具体事项通知如下:一、组织机构主办单位: 浙江省大学生科技竞赛委员会秘书处单位:浙江大学承办单位: 杭州电子科技大学二、竞赛主题1.竞赛主题:智能物流本主题主要是模拟离散制造业的智能物流小车,小车具有车间作业中的物料扫码识别、搬运、码垛和循迹等功能。
学生通过前期准备完成一套符合本命题要求的可运行装置,进行现场竞争性运行、现场拆改调试和现场加工的考核。
每个参赛作品根据项目不同提交结构设计方案、加工工艺方案、电路设计方案和创业企划书等报告。
以培养学生的实践动手能力和创新能力。
2.竞赛命题:智能物流小车(1)关于小车:自主设计制作智能物流小车,该小车应具有赛道自主行走、物料扫码识别、规避障碍、轨迹判断、自动转向和制动等功能。
这些功能可由机械或电控装置自动实现,不允许使用人工交互遥控,在指定场地完成规避障碍物并抓取目标物料放置到指定地点。
具体设计、材料选用及加工制作均由参赛学生自主完成。
行走车体、抓取执行机构件可由激光切割、3D打印、数控及雕刻等机加工方式自行设计制作,也可使用建议套件组;电控器件、主控板、检测元器件、电机和电池可使用建议套件组,或采用标准件,其中整车电池最大供电电压不超过9V。
(验车时提供相关电控部件规格及技术指标说明文档,验车不合格取消参赛资格。
2018中国机器人大赛比赛规则
原则上由各队报名表上的指导老师在赛前抽签确定分组与赛程。 如指导老师缺席,非特殊情况下,视为弃权,其他人不能替代。 比赛分组及对阵方法:
比赛分为小组赛和淘汰赛,赛前领队会议时以抽签方式进行小组 赛的分组。根据参赛队伍数量的不同灵活分组,原则上每个组不超过 4 支队伍,不少于 3 支队伍。同一个小组的每个队伍分别对阵,获胜 积 3 分,负不得分,平局积 1 分,并记录净胜小分。 小组排名方法:
2018 中国机器人大赛比赛规则 武术擂台赛项目
无差别 2vs2 项目
2018 中国机器人大赛武术擂台赛项目技术委员会 2018 年 5 月 14 日
2018 中国机器人大赛比赛规则
目录 一、项目简介............................................................................................. 1 二、技术委员会......................................................................................... 1 三、赛项说明............................................................................................. 1 四、比赛场地及器材................................................................................. 3 五、机器人要求......................................................................................... 4 六、评分标准............................................................................................. 6 七、赛程赛制............................................................................................. 7
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“旅游机器人探险游、寻宝游”竞赛规则(2018浙江省第三届大学生机器人竞赛)一、竞赛项目、机器人及报名要求二、场地、路线与环境三、非计分点:门、倾斜路面、长桥等四、计分点:景点、挡板、标识牌五、赛程、种子队、赛前准备工作六、计分计时、分值表七、其他附录、比赛场景路线图一、竞赛项目、目的、机器人及报名要求§1.1竞赛项目设置本比赛共设置2个竞赛项目,探险1个,寻宝1个。
项目设置及比赛限时§1.2 竞赛项目简介探险游:要求机器人在规定假期时间内,穿越险境、游历尽量多的景点,获得尽量多的得分,并在假期结束前回到出发地。
寻宝游:要求机器人在规定假期时间内,穿越险境、去随机指定的宝物所在景点寻宝,同时游历尽量多的景点,获得尽量多的得分,并在假期结束前回到出发地。
机器人竞赛的目的是引导参赛队研究、设计并制作具有优秀硬件与软件系统的移动机器人,逐步提高机器人多方面的能力与智能,如:a、系统规划与优化能力:在预定的假期时间内游历尽量多的景点,完成计划中的旅游活动,并回到出发地点。
是一种最优规划活动;需要有一定的系统规划与优化能力。
想得高分,就要游历尽量多的景点和难度高的景点,但存在来不及在规定的假期内回家的危险。
每一轮比赛中走两次,使得在第一次经验基础上,其后进行路径与方式的优化成为可能。
b、应变能力:旅游路线可能在比赛开始前很短的时间内正式公布;有些可移动景点与路障的摆放数量与位置,在机器人放进出发区后,随机确定。
这在一定程度上可控制竞赛的难度,并使旅游路线有一定的不确定性。
c、视力及定位:考验机器人辨别数字、二维码、文字、形状和色彩的能力,引导机器人视力及定位能力的提高。
d、爬坡能力:对于Ⅱ型和Ⅲ型机器人难度更大。
e、跨越门槛的能力:这对三类机器人都是重大考验。
f、快速性与稳定性。
机器人在的整个旅游过程中,始终要在快速性与稳定性中间求得平衡,否则,难以取得好的成绩。
§1.4 报名要求参赛对象:本次比赛分两个组别分别报名比赛,自制创新组和集成组,为鼓励高校教师、学生自制创新(希望同学们能学到更多),两大组别在奖项设置上应有所区别,数量侧重鼓励自制创新组。
1、自制创新组:高校在校学生(本科生、专科生)在教师的指导下由学生自我研制的机器人,同一个学校多台机器人可以相同方案。
必须使用由本校队员亲自制作的非遥控自主机器人参赛。
如果某队的机器人为“遥控机器人(包含在比赛过程中通过远程方式给机器人传递信息)、购买的机器人整机、能对现场人员的安全造成威胁的机器人、能对比赛场地造成损坏的机器人、中途整机替换的非本队首场使用的机器人(不包含对本队原参赛机器人的修理和合理改进)”之中的一种或多种,竞赛委员会有权利取消该代表队的参赛资格。
自制创新组比赛前要经过组委会竞赛监察组的检查,检查时要求本校参赛学生代表进行制作说明,并回答专家提问,留档取证,有三分之二以上专家确定认为不符合要求的机器人将取消本组别的比赛资格。
基本要求:a、由于机器人的机械结构框架相对固定,对机械结构不做特别要求,但各高校参赛队伍的机器人必须与其他高校参赛队的机器人在外观上有明显差异,在比赛现场改进、维修、调试机器人时应该保留这些差异性,方便裁判和其他参赛队的辨认,否则,裁判有权利取消该代表队的参赛资格。
b、电路部分,主电路板要求自主设计,并要求覆铜板上留有学校标志和比赛年限,在此基础上在某地方还可以做上特殊防伪标记,比如浙江科技学院,2017年,Robot。
最小系统、专门处理器模块、传感器模块可以购买,但所用程序必须自我设计完成。
c、软件部分,机器人的底层所有程序都要求本高校参赛学生自我设计完成,此部分检查是否自制的主要内容之一。
2、集成组:高校在校学生(本科生、专科生),所集成机器人不违背竞赛道德(比如对人或场地有伤害的除外)都可以报名参加比赛,不做特别要求。
机器人姓名:要求给每台机器人取一个姓名,用于报名、登记、标示、识别。
姓名长度2-7个汉字,2个字母/数字算一个汉字。
如:武夷山齐天大圣、嫦娥天狗玉兔、赛德穆桂英、莫妮卡宴、Robotluyou、红旗AK47、黄飞洪、李彪、Q360等等。
参赛队及名称:一台机器人及相关的老师学生为一个参赛队,队名即为机器人姓名,不必另起参赛队名称。
二级院/系名称不必出现在队名中。
专科高职院校报名机器人多于一定数量的项目,可单独设组。
领队老师、指导老师、教练/研制人:应明确每台机器人对应的领队老师、指导老师和研制人,教练即机器人的研制人。
二、场地、路线、环境§2.1场地赛场为7m×10m长方形,表面铺绿色地毯,周边有50mm高围挡。
旅游道路的中心有宽度约22-30mm的白色引导线,用以引导机器人。
制作设施的表面为密度板材(可能有贴面或涂刷油漆),不铺设地毯。
上面不一定有白色引导线,详见分项图。
§2.2路线图机器人旅游路线由直道、弯道、环路和交叉路口等组成,任意两个交叉路口之间的距离不小于400mm。
环路有方形、三角形和圆形等。
旅游路途有门、桥、坡道、减速板、倾斜路面、滑块、黑洞、风口等等,计分景点有平台形和直角梯形两类。
本次比赛路线图详见附录,无特殊情况不再做调整。
寻宝游时,门均为常开状态。
§2.3照明实际比赛场地的环境,不能保证光线照明均匀。
比赛场地周围的照明等级为一般室内状况,门窗可能有阳光射入。
参赛者在比赛前有一定时间了解赛场的光线情况及标定机器人。
比赛的挑战之一就是要求机器人能够在一个不确定照明、阴影、散光等实际情况的环境中进行比赛。
参赛者应意识到难以保证比赛现场有人使用照相机和摄像机的辅助光源,设计者应采取措施尽量避免这些光源对机器人的影响。
§2.4起止区起止区平台(1号平台):起止区均为八个平台中的“坤”位,500mm×500mm,高100mm的平台,有坡道。
机器人成功走下1号平台,即获得出发基本分。
未成功获得比赛基本分的,不能开始本次赛程。
计时器(自动或手动):过红点与平台边沿平行感应线为计时线,距道路平面约60mm。
安放位置见下图。
机器人出发遮挡到计时感应线时,开始计时;回家遮挡到计时感应线时,停止计时。
机器人尚未回家,但规定时间到,停止计时、同时停止旅游。
异常情况,根据裁判信号停止计时。
禁止通行板:禁行板为白板(宽≥400mm 、高≥300mm ),上面可能有红色圆圈或横线。
放置在斜坡与平台连接处。
机器人遇到该板,停止等待;移开该板时,机器人自动出发。
网咖平台:500mm ×500mm ,高100mm ,标记为2号平台“震”,有坡道。
相当于加油站、超市、热 身区、展现区。
机器人出发,必须先去2号平台“震”(网咖)。
Ⅰ型机器人应在此两次闪亮灯光,然后旋转≥180°。
Ⅱ型和Ⅲ型机器人应在此不少于两次点头或摇头,然后旋转≥180°。
探险时,4个门中的2个为关闭状态、2个为打开状态。
电子系统随机产生,所有人事先均不知设置状态。
寻宝时,本次比赛寻宝时所用的宝物都用统一图像表示,为比赛时图像统一,比赛用图像将于2018年2月,由竞赛秘书处公布。
共有3个宝物(4个门均为常开状态)。
机器人到达2-8号平台,标识牌上可能显示相应数字/符号/文字/图像等。
第1个宝物藏匿于3/4平台,地址密码在2号平台的标识牌右格中;第2个宝物藏匿于5/6平台,地址密码在第1个宝物所在平台的标识牌右格中; 第3个宝物藏匿于7/8平台,地址密码在第2个宝物所在平台的标识牌右格中。
宝物的藏匿位置:由机电系统或3个骰子随机产生。
(在机器人摆入起止区后、在禁行板等待)设置,由裁判助理分别负责区域景点标识牌的设置。
三、门、减速板、翘板桥、倾斜路面、长桥 §3.1 门4个门均跨越道路,摆放于所选道路段的中间部位。
机器人到达红色虚线位置时,该门可能自底板:门下有一块连接固定用底板,长500mm ×宽300mm 、厚25mm 的密度板,表面涂刷深灰色亚光漆,上有白色引导线;上下有1:2斜坡。
门槛:底板中间安放一道门槛,门槛表面为黄色。
门槛的截面为:宽30mm 、高15mm 的矩形。
蓝色门板:宽240×高160mm (上面有一条红线,约26×100mm ),机器人在运动中遇到蓝色门板,表示此门不通,不得冲撞。
§3.2 减速板底板为宽300×长300×厚25mm 木板,表面涂刷深灰色亚光漆,上有白色引导线;上下有1:2斜坡(底板用2-3mm 铁板时,没有上下坡)。
底板上面有2根等腰三角条,长120mm, 三角条表面为黄色。
三角条截面:高15mm ,底边30mm ,2根等腰三角条间距100mm 。
减速板可能连续摆放,但与其它设施之间的距离不小于300mm 。
§3.3翘板桥§3.4倾斜路面四、景点、挡板、标识牌直角梯形的垂直面中部有一块景点标识牌。
15,木工板,表面颜色较淡,木工板原色。
Ⅰ型机器人比赛时,挡板上沿挂于高200mm处;Ⅱ型和Ⅲ型机器人比赛时,挡板上沿挂于高500mm处。
§4.3 景点的标识牌1、直角梯形景点用标识牌:表面为白色打印纸,高100mm ×宽210mm ,标识牌安放位置固定,下沿高200mm 、上沿高300mm 。
标识牌上居中为一个长方格70mm ×170mm ,表格边框线1.5磅,白底黑字,字体“黑体”,居中,字号“72”,标明该景点编号和名称。
2、平台景点用标识牌:表面为白色打印纸,高100mm ×宽210mm ,标识牌安放位置固定,下沿高200mm 、上沿高300mm 。
标识牌上居中为对称两个方格各70mm ×70mm ,表格边框线1.5磅,白底黑字,字体“黑体”,居中,字号“72”,左格中数字为该景点编号,右格中为下一个宝物所在景点编号。
§4.4 平台型景点500mm ×500mm ,平台表面涂刷深灰色亚光漆,上面有23-26mm 宽的红色边界线,中间为八卦符号,详见下图。
100平台6个,高度100mm ,有500mm 宽一级连续坡道;450平台1个,高度450mm ,有300mm 宽坡道,可能是一级连续坡道,也可能是多级坡道; 900平台1个,高度900mm ,有300mm 宽坡道,可能是一级连续坡道,也可能是多级坡道。
所有坡道的坡度均约1:2(即坡高1,坡底2),坡道表面涂刷深灰色亚光漆,坡道与平台高度大于300mm 时,两侧有若干50mm 高防护栏杆。
景点面对坡道连接方向后边沿有景点标识牌,悬挂在框架上,上沿高300mm 。
五、赛程、种子队、赛前准备工作§5.1领队会议比赛前,召开领队会议:1、推选裁判、裁判助理;2、发放“机器人信息牌”;3、确定比赛分组及场地安排;4、其他事宜。